Joint Object Detection and Viewpoint Estimation using CNN features
|
|
|
- Cecil Dickerson
- 5 years ago
- Views:
Transcription

1 Joint Object Detection and Viewpoint Estimation using CNN features Carlos Guindel, David Martín and José M. Armingol Intelligent Systems Laboratory Universidad Carlos III de Madrid Wien 28 June 2017
2 Outline 2 Introduction Object detection Viewpoint estimation Results Conclusion
3 Outline 3 Introduction Object detection Viewpoint estimation Results Conclusion

4 Situational awareness for vehicles 4 Advanced Driver Assistance Systems (ADAS) and autonomous vehicles rely on a trustable on-board obstacle detection module. A precise classification of the obstacles enables accurate predictions of future traffic situations, including those involving VRU. Another significant cue that can be used to anticipate future events is the orientation of the objects moving on the ground plane.







5 On-board object detection 5 Laser rangefinder Computer Vision Hand-crafted features Convolutional Neural Networks Recognition Detection
6 Proposal overview 6 RPN Regions RGB Image Convolutional Layers Features Fast R-CNN Faster R-CNN 1 Classification Refined Bounding Box 1 S. Ren, K. He, R. Girshick, and J. Sun, Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks, IEEE Trans. Pattern Anal. Mach. Intell., vol. 39, no. 6, pp , Viewpoint
7 Outline 7 Introduction Object detection Viewpoint estimation Results Conclusion

8 Object detection 8 Traffic environments Diversity of agents Unstructured environment Faster R-CNN End-to-end feature learning Highly efficient No prior constraints about the location of objects in the image Meant for more than 21 classes S. Ren, K. He, R. Girshick, and J. Sun, Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks, IEEE Trans. Pattern Anal. Mach. Intell., vol. 39, no. 6, pp , 2016.
9 Faster R-CNN framework 9 Parameters are learned through a multi-task loss Conv. features in these regions are pooled for classification A RPN generates proposals wrt. a fixed set of anchors Convolutional features computed only once per image S. Ren, K. He, R. Girshick, and J. Sun, Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks, IEEE Trans. Pattern Anal. Mach. Intell., vol. 39, no. 6, pp , 2016.
10 Fine-tuning for traffic environments 10 Optimized anchors Management of class imbalance Information gain multinomial logistic loss for the class inference N NK L = L = 1 N 1,klog( pƹ n,k ) N H ln,l n pƹ n,ln ) n=1 n=1 k=1 Infogain matrix H 0, H K,K
11 Outline 11 Introduction Object detection Viewpoint estimation Results Conclusion
12 Viewpoint estimation 12 1, 2 RPN Regions RGB Image Convolutional Layers Features Fast R-CNN Features can be learned for multiple tasks 4 3 Refined Classification Bounding Box 5 Viewpoint

13 Discrete viewpoint inference 13 N b angle bins Θ i Θ Nb N b = 8 Training: θ i0 Θ i Inference output: r Δ N b 1 r Final estimation: Θ i መθ Elements of r
14 Joint detection and viewpoint estimation 14 CNN outputs RPN Fast R-CNN For each anchor: Objectness For each proposal: Class Predicted bounding box Bounding box refinement Per class Number of angle bins Number of classes Viewpoint N b K N b K elements
15 Joint detection and viewpoint estimation 15 Fast R-CNN B. Box regression Class Viewpoint Softmax Softmax Softmax FC layer FC layer FC layer Fully connected (FC) layers Fixed size feat. vector Only N b K 4096 new weights Conv. design is unchanged Proposal Feature map
16 Loss function and training 16 Approximate joint training strategy Unweighted muli-task loss with five components Logistic loss for RPN objectness Smooth-L1 loss for RPN b.box regression Infogain loss for class L inf p i v i N = H vi,k log(p i,k ) n=1 frequent H vi,k Logistic loss for viewpoint estimation Only the N b elements of the ground-truth class Smooth-L1 loss for b.box regression
17 Outline 17 Introduction Object detection Viewpoint estimation Results Conclusion
18 Experiments 18 On the KITTI Vision Benchmark Suite Object detection dataset Parameters: Scale: 500 px. in height 50k iter. l r = k iter. l r = k iter. l r = VGG16 architecture, initialized with ImageNet weights. Source: KITTI: A. Geiger, P. Lenz, and R. Urtasun, Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite, in Proc. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2012, pp
19 Experiments 19 N b = 8 (resolution: π/4 rad) Infogain matrix values: H k,k = 2 f min f k 1 8 Number of ocurrences of the less frequent class Evaluation criteria Number of instances of class k Average precision Average orientation similarity (performance of detection + orientation) Minimum overlaps established by the KITTI benchmark
 than the ones in the paper: Used the whole KITTI training set Trained only with Car, Pedestrian and Cyclist Non-fixed weights (and bias) at the first")
20 Results (KITTI submission: FRCNN+Or) 20 Detection (AP as %) Easy Moderate Hard Car Pedestrian Cyclist map ,64 SubCNN Slightly different (generally better) than the ones in the paper: Used the whole KITTI training set Trained only with Car, Pedestrian and Cyclist Non-fixed weights (and bias) at the first convolutional layers Det + Or (AOS as %) Easy Moderate Hard Car Pedestrian Cyclist maos ,65 SubCNN SubCNN: Y. Xiang, W. Choi, Y. Lin and S. Savarese, Subcategory-aware Convolutional Neural Networks for Object Proposals and Detection, in IEEE Winter Conference on Applications of Computer Vision (WACV), 2017, pp
21 AOS (%) Comparison with other methods TOP 10 AOS ranking MODERATE difficulty Only published methods Car Pedestrians Cyclists Global rankings (including unpublished methods): Car: 11 st Pedestrian: 9 th Cyclist: 10 th
22 RUNTIME PER FRAME (S) Comparison with other methods 22 5 Reported runtimes for TOP 10 AOS Only published 4,5 4 3,5 3 2,5 2 1,5 1 0, ms* *Average running time using an implementation based on py-faster-rcnn (Python & Caffe) and a NVIDIA Titan Xp kindly donated by NVIDIA Corporation

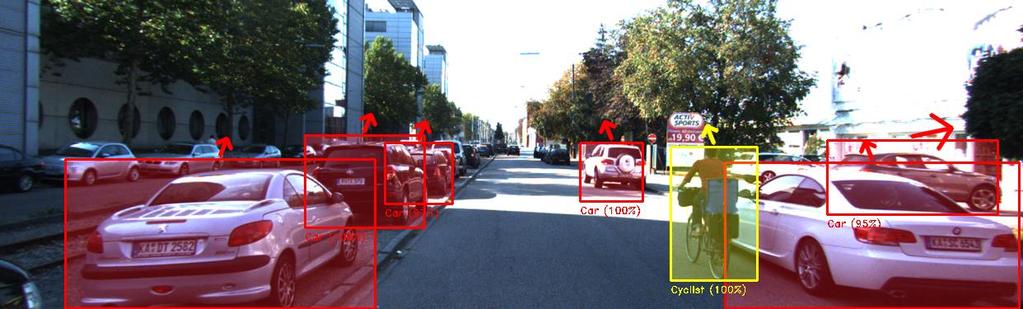



23 Sample test images 23
24 Outline 24 Introduction Object detection Viewpoint estimation Results Conclusion

25 Conclusion 25 Single-image object detection + orientation estimation in traffic scenes. The same convolutional features can be successfully used for both tasks. Results comparable with non-real-time, sophisticated approaches. Orientation is a step towards a real scene understanding. Future work Fine-grained orientation inference using the cross-entropy logistic loss n L = 1 n n=1 [p n log pƹ n + 1 p n log(1 pƹ n )] Improvements: Network architecture Methods to overcome the fixed-size receptive field Continuously-evolving code at:
26 Thank you for your attention! Carlos Guindel Intelligent Systems Laboratory Universidad Carlos III de Madrid Wien 28 June
27 AVERAGE PRECISION (%) Precision change when introducing viewpoint ,25 77,72 MODERATE DIFFICULTY LEVEL 69,6 67,12 53,08 44,82 Car Pedestrian Cyclist Detection Detection+Viewpoint Detection (ΔAP as %) Easy Moderate Hard Car +0,72 +0,47 +0,26 Pedestrian -1,85-2,47-3,00 Cyclist -12,16-8,25-8,11
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen, Huimin Ma, Ji Wan, Bo Li, Tian Xia CVPR 2017 (Spotlight) Presented By: Jason Ku Overview Motivation Dataset Network Architecture
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection
 MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
MCMOT: Multi-Class Multi-Object Tracking using Changing Point Detection ILSVRC 2016 Object Detection from Video Byungjae Lee¹, Songguo Jin¹, Enkhbayar Erdenee¹, Mi Young Nam², Young Gui Jung², Phill Kyu
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren Kaiming He Ross Girshick Jian Sun Present by: Yixin Yang Mingdong Wang 1 Object Detection 2 1 Applications Basic
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren Kaiming He Ross Girshick Jian Sun Present by: Yixin Yang Mingdong Wang 1 Object Detection 2 1 Applications Basic
Self Driving. DNN * * Reinforcement * Unsupervised *
 CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
CNN 응용 Methods Traditional Deep-Learning based Non-machine Learning Machine-Learning based method Supervised SVM MLP CNN RNN (LSTM) Localizati on GPS, SLAM Self Driving Perception Pedestrian detection
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm
 CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
CIS680: Vision & Learning Assignment 2.b: RPN, Faster R-CNN and Mask R-CNN Due: Nov. 21, 2018 at 11:59 pm Instructions This is an individual assignment. Individual means each student must hand in their
Regionlet Object Detector with Hand-crafted and CNN Feature
 Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Regionlet Object Detector with Hand-crafted and CNN Feature Xiaoyu Wang Research Xiaoyu Wang Research Ming Yang Horizon Robotics Shenghuo Zhu Alibaba Group Yuanqing Lin Baidu Overview of this section Regionlet
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs
 Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Introduction to Deep Learning for Facial Understanding Part III: Regional CNNs Raymond Ptucha, Rochester Institute of Technology, USA Tutorial-9 May 19, 218 www.nvidia.com/dli R. Ptucha 18 1 Fair Use Agreement
Object Detection. CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR
 Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
Object Detection CS698N Final Project Presentation AKSHAT AGARWAL SIDDHARTH TANWAR Problem Description Arguably the most important part of perception Long term goals for object recognition: Generalization
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Subcategory-aware Convolutional Neural Networks for Object Proposals and Detection
 Subcategory-aware Convolutional Neural Networks for Object Proposals and Detection Yu Xiang 1, Wongun Choi 2, Yuanqing Lin 3, and Silvio Savarese 4 1 University of Washington, 2 NEC Laboratories America,
Subcategory-aware Convolutional Neural Networks for Object Proposals and Detection Yu Xiang 1, Wongun Choi 2, Yuanqing Lin 3, and Silvio Savarese 4 1 University of Washington, 2 NEC Laboratories America,
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
R-FCN: Object Detection with Really - Friggin Convolutional Networks
 R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
R-FCN: Object Detection with Really - Friggin Convolutional Networks Jifeng Dai Microsoft Research Li Yi Tsinghua Univ. Kaiming He FAIR Jian Sun Microsoft Research NIPS, 2016 Or Region-based Fully Convolutional
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Yiqi Yan. May 10, 2017
 Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
Yiqi Yan May 10, 2017 P a r t I F u n d a m e n t a l B a c k g r o u n d s Convolution Single Filter Multiple Filters 3 Convolution: case study, 2 filters 4 Convolution: receptive field receptive field
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Visual features detection based on deep neural network in autonomous driving tasks
 430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
430 Fomin I., Gromoshinskii D., Stepanov D. Visual features detection based on deep neural network in autonomous driving tasks Ivan Fomin, Dmitrii Gromoshinskii, Dmitry Stepanov Computer vision lab Russian
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object Detection on Self-Driving Cars in China. Lingyun Li
 Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
Object Detection on Self-Driving Cars in China Lingyun Li Introduction Motivation: Perception is the key of self-driving cars Data set: 10000 images with annotation 2000 images without annotation (not
arxiv: v4 [cs.cv] 12 Jul 2018
![arxiv: v4 [cs.cv] 12 Jul 2018](/thumbs/82/85481048.jpg "arxiv: v4 [cs.cv] 12 Jul 2018") Joint 3D Proposal Generation and Object Detection from View Aggregation Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Steven L. Waslander arxiv:1712.02294v4 [cs.cv] 12 Jul 2018 Abstract We
Joint 3D Proposal Generation and Object Detection from View Aggregation Jason Ku, Melissa Mozifian, Jungwook Lee, Ali Harakeh, and Steven L. Waslander arxiv:1712.02294v4 [cs.cv] 12 Jul 2018 Abstract We
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
A Study of Vehicle Detector Generalization on U.S. Highway
 26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
26 IEEE 9th International Conference on Intelligent Transportation Systems (ITSC) Windsor Oceanico Hotel, Rio de Janeiro, Brazil, November -4, 26 A Study of Vehicle Generalization on U.S. Highway Rakesh
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Deep Convolutional Neural Networks for Pedestrian Detection with Skip Pooling
 Deep Convolutional Neural Networks for Pedestrian Detection with Skip Pooling Jie Liu, Xingkun Gao, Nianyuan Bao, Jie Tang, and Gangshan Wu State Key Laboratory for Novel Software Technology, Nanjing University,
Deep Convolutional Neural Networks for Pedestrian Detection with Skip Pooling Jie Liu, Xingkun Gao, Nianyuan Bao, Jie Tang, and Gangshan Wu State Key Laboratory for Novel Software Technology, Nanjing University,
VISION FOR AUTOMOTIVE DRIVING
 VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
VISION FOR AUTOMOTIVE DRIVING French Japanese Workshop on Deep Learning & AI, Paris, October 25th, 2017 Quoc Cuong PHAM, PhD Vision and Content Engineering Lab AI & MACHINE LEARNING FOR ADAS AND SELF-DRIVING
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
arxiv: v1 [cs.cv] 1 Dec 2016
![arxiv: v1 [cs.cv] 1 Dec 2016](/thumbs/89/98666847.jpg "arxiv: v1 [cs.cv] 1 Dec 2016") arxiv:1612.00496v1 [cs.cv] 1 Dec 2016 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University Dragomir Anguelov Zoox, Inc. John Flynn Zoox, Inc. amousavi@gmu.edu
arxiv:1612.00496v1 [cs.cv] 1 Dec 2016 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University Dragomir Anguelov Zoox, Inc. John Flynn Zoox, Inc. amousavi@gmu.edu
3 Object Detection. BVM 2018 Tutorial: Advanced Deep Learning Methods. Paul F. Jaeger, Division of Medical Image Computing
 3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
3 Object Detection BVM 2018 Tutorial: Advanced Deep Learning Methods Paul F. Jaeger, of Medical Image Computing What is object detection? classification segmentation obj. detection (1 label per pixel)
Automatic detection of books based on Faster R-CNN
 Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
Automatic detection of books based on Faster R-CNN Beibei Zhu, Xiaoyu Wu, Lei Yang, Yinghua Shen School of Information Engineering, Communication University of China Beijing, China e-mail: zhubeibei@cuc.edu.cn,
OBJECT DETECTION HYUNG IL KOO
 OBJECT DETECTION HYUNG IL KOO INTRODUCTION Computer Vision Tasks Classification + Localization Classification: C-classes Input: image Output: class label Evaluation metric: accuracy Localization Input:
OBJECT DETECTION HYUNG IL KOO INTRODUCTION Computer Vision Tasks Classification + Localization Classification: C-classes Input: image Output: class label Evaluation metric: accuracy Localization Input:
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task
 Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Fine-tuning Pre-trained Large Scaled ImageNet model on smaller dataset for Detection task Kyunghee Kim Stanford University 353 Serra Mall Stanford, CA 94305 kyunghee.kim@stanford.edu Abstract We use a
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Project 3 Q&A. Jonathan Krause
 Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Project 3 Q&A Jonathan Krause 1 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations 2 Outline R-CNN Review Error metrics Code Overview Project 3 Report Project 3 Presentations
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
CS6501: Deep Learning for Visual Recognition. Object Detection I: RCNN, Fast-RCNN, Faster-RCNN
 CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
CS6501: Deep Learning for Visual Recognition Object Detection I: RCNN, Fast-RCNN, Faster-RCNN Today s Class Object Detection The RCNN Object Detector (2014) The Fast RCNN Object Detector (2015) The Faster
Final Report: Smart Trash Net: Waste Localization and Classification
 Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
Final Report: Smart Trash Net: Waste Localization and Classification Oluwasanya Awe oawe@stanford.edu Robel Mengistu robel@stanford.edu December 15, 2017 Vikram Sreedhar vsreed@stanford.edu Abstract Given
arxiv: v1 [cs.cv] 16 Mar 2018
![arxiv: v1 [cs.cv] 16 Mar 2018](/thumbs/77/75734034.jpg "arxiv: v1 [cs.cv] 16 Mar 2018") arxiv:1803.06199v1 [cs.cv] 16 Mar 2018 Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds Martin Simon *, Stefan Milz, Karl Amende *, Horst-Michael Gross * Valeo Schalter
arxiv:1803.06199v1 [cs.cv] 16 Mar 2018 Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection on Point Clouds Martin Simon *, Stefan Milz, Karl Amende *, Horst-Michael Gross * Valeo Schalter
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS
 R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS JIFENG DAI YI LI KAIMING HE JIAN SUN MICROSOFT RESEARCH TSINGHUA UNIVERSITY MICROSOFT RESEARCH MICROSOFT RESEARCH SPEED/ACCURACY TRADE-OFFS
R-FCN: OBJECT DETECTION VIA REGION-BASED FULLY CONVOLUTIONAL NETWORKS JIFENG DAI YI LI KAIMING HE JIAN SUN MICROSOFT RESEARCH TSINGHUA UNIVERSITY MICROSOFT RESEARCH MICROSOFT RESEARCH SPEED/ACCURACY TRADE-OFFS
arxiv: v2 [cs.cv] 10 Apr 2017
![arxiv: v2 [cs.cv] 10 Apr 2017](/thumbs/72/67855533.jpg "arxiv: v2 [cs.cv] 10 Apr 2017") arxiv:1612.00496v2 [cs.cv] 10 Apr 2017 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University Dragomir Anguelov Zoox, Inc. John Flynn Zoox, Inc. amousavi@gmu.edu
arxiv:1612.00496v2 [cs.cv] 10 Apr 2017 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University Dragomir Anguelov Zoox, Inc. John Flynn Zoox, Inc. amousavi@gmu.edu
Cascade Region Regression for Robust Object Detection
 Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
Large Scale Visual Recognition Challenge 2015 (ILSVRC2015) Cascade Region Regression for Robust Object Detection Jiankang Deng, Shaoli Huang, Jing Yang, Hui Shuai, Zhengbo Yu, Zongguang Lu, Qiang Ma, Yali
3D Bounding Box Estimation Using Deep Learning and Geometry
 3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University amousavi@gmu.edu Dragomir Anguelov Zoox, Inc. drago@zoox.com Jana Košecká George Mason University kosecka@gmu.edu
3D Bounding Box Estimation Using Deep Learning and Geometry Arsalan Mousavian George Mason University amousavi@gmu.edu Dragomir Anguelov Zoox, Inc. drago@zoox.com Jana Košecká George Mason University kosecka@gmu.edu
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS. Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang
 EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
EFFECTIVE OBJECT DETECTION FROM TRAFFIC CAMERA VIDEOS Honghui Shi, Zhichao Liu*, Yuchen Fan, Xinchao Wang, Thomas Huang Image Formation and Processing (IFP) Group, University of Illinois at Urbana-Champaign
Object Detection and Its Implementation on Android Devices
 Object Detection and Its Implementation on Android Devices Zhongjie Li Stanford University 450 Serra Mall, Stanford, CA 94305 jay2015@stanford.edu Rao Zhang Stanford University 450 Serra Mall, Stanford,
Object Detection and Its Implementation on Android Devices Zhongjie Li Stanford University 450 Serra Mall, Stanford, CA 94305 jay2015@stanford.edu Rao Zhang Stanford University 450 Serra Mall, Stanford,
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Distance estimation with 2.5D anchors and its application to robot navigation
 https://doi.org/10.1186/s40648-018-0119-5 RESEARCH ARTICLE Open Access Distance estimation with 2.5D anchors and its application to robot navigation Hirotaka Hachiya 1*, Yuki Saito 2, Kazuma Iteya 1, Masaya
https://doi.org/10.1186/s40648-018-0119-5 RESEARCH ARTICLE Open Access Distance estimation with 2.5D anchors and its application to robot navigation Hirotaka Hachiya 1*, Yuki Saito 2, Kazuma Iteya 1, Masaya
Mask R-CNN. By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi
 Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Mask R-CNN By Kaiming He, Georgia Gkioxari, Piotr Dollar and Ross Girshick Presented By Aditya Sanghi Types of Computer Vision Tasks http://cs231n.stanford.edu/ Semantic vs Instance Segmentation Image
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Optimizing Object Detection:
 Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
Lecture 10: Optimizing Object Detection: A Case Study of R-CNN, Fast R-CNN, and Faster R-CNN Visual Computing Systems Today s task: object detection Image classification: what is the object in this image?
Illuminating Pedestrians via Simultaneous Detection & Segmentation
 Illuminating Pedestrians via Simultaneous Detection & Segmentation Garrick Brazil, Xi Yin, Xiaoming Liu Michigan State University, East Lansing, MI 48824 {brazilga, yinxi1, liuxm}@msu.edu Abstract Pedestrian
Illuminating Pedestrians via Simultaneous Detection & Segmentation Garrick Brazil, Xi Yin, Xiaoming Liu Michigan State University, East Lansing, MI 48824 {brazilga, yinxi1, liuxm}@msu.edu Abstract Pedestrian
FCHD: A fast and accurate head detector
 JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 FCHD: A fast and accurate head detector Aditya Vora, Johnson Controls Inc. arxiv:1809.08766v2 [cs.cv] 26 Sep 2018 Abstract In this paper, we
JOURNAL OF L A TEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2015 1 FCHD: A fast and accurate head detector Aditya Vora, Johnson Controls Inc. arxiv:1809.08766v2 [cs.cv] 26 Sep 2018 Abstract In this paper, we
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Accurate Single Stage Detector Using Recurrent Rolling Convolution
 Accurate Single Stage Detector Using Recurrent Rolling Convolution Jimmy Ren Xiaohao Chen Jianbo Liu Wenxiu Sun Jiahao Pang Qiong Yan Yu-Wing Tai Li Xu SenseTime Group Limited {rensijie, chenxiaohao, liujianbo,
Accurate Single Stage Detector Using Recurrent Rolling Convolution Jimmy Ren Xiaohao Chen Jianbo Liu Wenxiu Sun Jiahao Pang Qiong Yan Yu-Wing Tai Li Xu SenseTime Group Limited {rensijie, chenxiaohao, liujianbo,
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015
 CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
CEA LIST s participation to the Scalable Concept Image Annotation task of ImageCLEF 2015 Etienne Gadeski, Hervé Le Borgne, and Adrian Popescu CEA, LIST, Laboratory of Vision and Content Engineering, France
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Introduction In this supplementary material, Section 2 details the 3D annotation for CAD models and real
Fast Vehicle Detector for Autonomous Driving
 Fast Vehicle Detector for Autonomous Driving Che-Tsung Lin 1,2, Patrisia Sherryl Santoso 2, Shu-Ping Chen 1, Hung-Jin Lin 1, Shang-Hong Lai 1 1 Department of Computer Science, National Tsing Hua University,
Fast Vehicle Detector for Autonomous Driving Che-Tsung Lin 1,2, Patrisia Sherryl Santoso 2, Shu-Ping Chen 1, Hung-Jin Lin 1, Shang-Hong Lai 1 1 Department of Computer Science, National Tsing Hua University,
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials)
") ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
ActiveStereoNet: End-to-End Self-Supervised Learning for Active Stereo Systems (Supplementary Materials) Yinda Zhang 1,2, Sameh Khamis 1, Christoph Rhemann 1, Julien Valentin 1, Adarsh Kowdle 1, Vladimir
Convolutional Neural Networks: Applications and a short timeline. 7th Deep Learning Meetup Kornel Kis Vienna,
 Convolutional Neural Networks: Applications and a short timeline 7th Deep Learning Meetup Kornel Kis Vienna, 1.12.2016. Introduction Currently a master student Master thesis at BME SmartLab Started deep
Convolutional Neural Networks: Applications and a short timeline 7th Deep Learning Meetup Kornel Kis Vienna, 1.12.2016. Introduction Currently a master student Master thesis at BME SmartLab Started deep
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
Driving dataset in the wild: Various driving scenes
 Driving dataset in the wild: Various driving scenes Kurt Keutzer Byung Gon Song John Chuang, Ed. Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-92
Driving dataset in the wild: Various driving scenes Kurt Keutzer Byung Gon Song John Chuang, Ed. Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-92
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
Fully-Convolutional Siamese Networks for Object Tracking
 Fully-Convolutional Siamese Networks for Object Tracking Luca Bertinetto*, Jack Valmadre*, João Henriques, Andrea Vedaldi and Philip Torr www.robots.ox.ac.uk/~luca luca.bertinetto@eng.ox.ac.uk Tracking
Fully-Convolutional Siamese Networks for Object Tracking Luca Bertinetto*, Jack Valmadre*, João Henriques, Andrea Vedaldi and Philip Torr www.robots.ox.ac.uk/~luca luca.bertinetto@eng.ox.ac.uk Tracking
arxiv: v1 [cs.cv] 22 Mar 2017
![arxiv: v1 [cs.cv] 22 Mar 2017](/thumbs/72/66982849.jpg "arxiv: v1 [cs.cv] 22 Mar 2017") Deep MANTA: A Coarse-to-fine Many-Task Network for joint 2D and 3D vehicle analysis from monocular image Florian Chabot 1, Mohamed Chaouch 1, Jaonary Rabarisoa 1, Céline Teulière 2, Thierry Chateau 2 1
Deep MANTA: A Coarse-to-fine Many-Task Network for joint 2D and 3D vehicle analysis from monocular image Florian Chabot 1, Mohamed Chaouch 1, Jaonary Rabarisoa 1, Céline Teulière 2, Thierry Chateau 2 1
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
SqueezeDet: Unified, Small, Low Power Fully Convolutional Neural Networks for Real-Time Object Detection for Autonomous Driving
 : Unified, Small, Low Power Fully Convolutional Neural Networks for Real-Time Object Detection for Autonomous Driving Bichen Wu 1, Forrest Iandola 1,2, Peter H. Jin 1, Kurt Keutzer 1,2 1 UC Berkeley, 2
: Unified, Small, Low Power Fully Convolutional Neural Networks for Real-Time Object Detection for Autonomous Driving Bichen Wu 1, Forrest Iandola 1,2, Peter H. Jin 1, Kurt Keutzer 1,2 1 UC Berkeley, 2
Multi-View 3D Object Detection Network for Autonomous Driving
 Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Multi-View 3D Object Detection Network for Autonomous Driving Xiaozhi Chen 1, Huimin Ma 1, Ji Wan 2, Bo Li 2, Tian Xia 2 1 Department of Electronic Engineering, Tsinghua University 2 Baidu Inc. {chenxz12@mails.,
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Deep Learning Inference in Facebook Data Centers: Characterization, Performance Optimizations, and Hardware Implications
 Deep Learning Inference in Facebook Data Centers: Characterization, Performance Optimizations, and Hardware Implications Jongsoo Park Facebook AI System SW/HW Co-design Team Sep-21 2018 Team Introduction
Deep Learning Inference in Facebook Data Centers: Characterization, Performance Optimizations, and Hardware Implications Jongsoo Park Facebook AI System SW/HW Co-design Team Sep-21 2018 Team Introduction
Fully-Convolutional Siamese Networks for Object Tracking
 Fully-Convolutional Siamese Networks for Object Tracking Luca Bertinetto*, Jack Valmadre*, João Henriques, Andrea Vedaldi and Philip Torr www.robots.ox.ac.uk/~luca luca.bertinetto@eng.ox.ac.uk Tracking
Fully-Convolutional Siamese Networks for Object Tracking Luca Bertinetto*, Jack Valmadre*, João Henriques, Andrea Vedaldi and Philip Torr www.robots.ox.ac.uk/~luca luca.bertinetto@eng.ox.ac.uk Tracking
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Object Detection and Classification in Occupancy Grid Maps using Deep Convolutional Networks
 arxiv:1805.08689v2 [cs.cv] 5 Dec 2018 Object Detection and Classification in Occupancy Grid Maps using Deep Convolutional Networks Sascha Wirges, Tom Fischer and Christoph Stiller Jesus Balado Frias Mobile
arxiv:1805.08689v2 [cs.cv] 5 Dec 2018 Object Detection and Classification in Occupancy Grid Maps using Deep Convolutional Networks Sascha Wirges, Tom Fischer and Christoph Stiller Jesus Balado Frias Mobile
LEARNING TO INFER GRAPHICS PROGRAMS FROM HAND DRAWN IMAGES
 LEARNING TO INFER GRAPHICS PROGRAMS FROM HAND DRAWN IMAGES Kevin Ellis - MIT, Daniel Ritchie - Brown University, Armando Solar-Lezama - MIT, Joshua b. Tenenbaum - MIT Presented by : Maliha Arif Advanced
LEARNING TO INFER GRAPHICS PROGRAMS FROM HAND DRAWN IMAGES Kevin Ellis - MIT, Daniel Ritchie - Brown University, Armando Solar-Lezama - MIT, Joshua b. Tenenbaum - MIT Presented by : Maliha Arif Advanced
A Novel Representation and Pipeline for Object Detection
 A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
A Novel Representation and Pipeline for Object Detection Vishakh Hegde Stanford University vishakh@stanford.edu Manik Dhar Stanford University dmanik@stanford.edu Abstract Object detection is an important
arxiv: v3 [cs.cv] 2 Jun 2017
![arxiv: v3 [cs.cv] 2 Jun 2017](/thumbs/86/93645380.jpg "arxiv: v3 [cs.cv] 2 Jun 2017") Incorporating the Knowledge of Dermatologists to Convolutional Neural Networks for the Diagnosis of Skin Lesions arxiv:1703.01976v3 [cs.cv] 2 Jun 2017 Iván González-Díaz Department of Signal Theory and
Incorporating the Knowledge of Dermatologists to Convolutional Neural Networks for the Diagnosis of Skin Lesions arxiv:1703.01976v3 [cs.cv] 2 Jun 2017 Iván González-Díaz Department of Signal Theory and
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Fuzzy Set Theory in Computer Vision: Example 3
 Fuzzy Set Theory in Computer Vision: Example 3 Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Purpose of these slides are to make you aware of a few of the different CNN architectures
Fuzzy Set Theory in Computer Vision: Example 3 Derek T. Anderson and James M. Keller FUZZ-IEEE, July 2017 Overview Purpose of these slides are to make you aware of a few of the different CNN architectures
Using Faster-RCNN to Improve Shape Detection in LIDAR
 Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Using Faster-RCNN to Improve Shape Detection in LIDAR TJ Melanson Stanford University Stanford, CA 94305 melanson@stanford.edu Abstract In this paper, I propose a method for extracting objects from unordered
Deep Learning For Video Classification. Presented by Natalie Carlebach & Gil Sharon
 Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Deep Learning For Video Classification Presented by Natalie Carlebach & Gil Sharon Overview Of Presentation Motivation Challenges of video classification Common datasets 4 different methods presented in
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
DepthCN: Vehicle Detection Using 3D-LIDAR and ConvNet
 DepthCN: Vehicle Detection Using 3D-LIDAR and ConvNet Alireza Asvadi, Luis Garrote, Cristiano Premebida, Paulo Peixoto and Urbano J. Nunes Abstract This paper addresses the problem of vehicle detection
DepthCN: Vehicle Detection Using 3D-LIDAR and ConvNet Alireza Asvadi, Luis Garrote, Cristiano Premebida, Paulo Peixoto and Urbano J. Nunes Abstract This paper addresses the problem of vehicle detection
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE. Dennis Lui August 2017
 DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
DEEP NEURAL NETWORKS CHANGING THE AUTONOMOUS VEHICLE LANDSCAPE Dennis Lui August 2017 THE RISE OF GPU COMPUTING APPLICATIONS 10 7 10 6 GPU-Computing perf 1.5X per year 1000X by 2025 ALGORITHMS 10 5 1.1X
AUTONOMOUS driving is receiving a lot of attention
 3D Object Proposals using Stereo Imagery for Accurate Object Class Detection Xiaozhi Chen, Kaustav Kundu, Yukun Zhu, Huimin Ma, Sanja Fidler and Raquel Urtasun arxiv:68.77v2 [cs.cv] 25 Apr 27 Abstract
3D Object Proposals using Stereo Imagery for Accurate Object Class Detection Xiaozhi Chen, Kaustav Kundu, Yukun Zhu, Huimin Ma, Sanja Fidler and Raquel Urtasun arxiv:68.77v2 [cs.cv] 25 Apr 27 Abstract
A CLOSER LOOK: SMALL OBJECT DETECTION IN FASTER R-CNN. Christian Eggert, Stephan Brehm, Anton Winschel, Dan Zecha, Rainer Lienhart
 A CLOSER LOOK: SMALL OBJECT DETECTION IN FASTER R-CNN Christian Eggert, Stephan Brehm, Anton Winschel, Dan Zecha, Rainer Lienhart Multimedia Computing and Computer Vision Lab University of Augsburg ABSTRACT
A CLOSER LOOK: SMALL OBJECT DETECTION IN FASTER R-CNN Christian Eggert, Stephan Brehm, Anton Winschel, Dan Zecha, Rainer Lienhart Multimedia Computing and Computer Vision Lab University of Augsburg ABSTRACT
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
CS230: Lecture 3 Various Deep Learning Topics
 CS230: Lecture 3 Various Deep Learning Topics Kian Katanforoosh, Andrew Ng Today s outline We will learn how to: - Analyse a problem from a deep learning approach - Choose an architecture - Choose a loss
CS230: Lecture 3 Various Deep Learning Topics Kian Katanforoosh, Andrew Ng Today s outline We will learn how to: - Analyse a problem from a deep learning approach - Choose an architecture - Choose a loss