Perception II: Pinhole camera and Stereo Vision
|
|
|
- August Parks
- 5 years ago
- Views:
Transcription

1 Perception II: Pinhole camera and Stereo Vision Davide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1
2 Mobile Robot Control Scheme knowledge, data base mission commands Localization Map Building position global map Cognition Path Planning environment model local map path Perception Information Extraction raw data Sensing see-think-act Path Execution actuator commands Acting Motion Control Real World Environment
3 Computer vision definition Automatic extraction of meaningful information from images and videos roof sky tower building building door car ground persons window car plant Outdoor scene City European Semantic information Geometric information 3


4 Computer vision applications 3D reconstruction and modeling Recognition Motion capture Augmented reality: Video games and tele-operation Robot navigation and automotive Medical imaging Google Earth, Microsoft s Bing Maps Mars rover Spirit used cameras for visual odometry 4

5 The camera Sony Cybershot WX1 5
6 The camera image formation If we place a piece of film in front of an object, do we get a reasonable image? object Photoreceptive surface 6
7 The camera image formation If we place a piece of film in front of an object, do we get a reasonable image? Add a barrier to block off most of the rays This reduces blurring The opening is known as the aperture object barrier film 7

8 The camera camera obscura (pinhole camera) Pinhole model: Captures beam of rays all rays through a single point The point is called Center of Projection or Optical Center An inverted image is formed on the Image Plane We will use the pinhole camera model to describe how the image is formed Gemma-Frisius ( ) 8

9 Home-made pinhole camera What can we do to reduce the blur? Based on slide by Steve Seitz

10 Shrinking the aperture Why not make the aperture as small as possible?

11 11 Lecture 5 - Pinhole Camera Model Shrinking the aperture Why not make the aperture as small as possible? Less light gets through (must increase the exposure) Diffraction effects
12 The camera why use a lens? The ideal pinhole: only one ray of light reaches each point on the film image can be very dim; gives rise to diffraction effects Making the pinhole bigger (i.e. aperture) makes the image blurry 12
13 The camera why use a lens? A lens focuses light onto the film Rays passing through the optical center are not deviated object Lens film
14 The camera why use a lens? A lens focuses light onto the film Rays passing through the optical center are not deviated All rays parallel to the optical axis converge at the focal point object Lens Focal Plane Focal Point Focal Length: f
15 Perspective effects Far away objects appear smaller

16 Perspective effects
17 Projective Geometry What is lost? Length Angles Parallel? Perpendicular?

18 Projective Geometry What is preserved? Straight lines are still straight

19 Vanishing points and lines Parallel lines in the world intersect in the image at a vanishing point
 Vanishing line Vanishing point Vanishing")
20 Vanishing points and lines Vertical vanishing point (at infinity) Vanishing line Vanishing point Vanishing point


21 Perspective and art Use of correct perspective projection indicated in 1 st century B.C. frescoes Skill resurfaces in Renaissance: artists develop systematic methods to determine perspective projection (around ) Raphael Durer, 1525

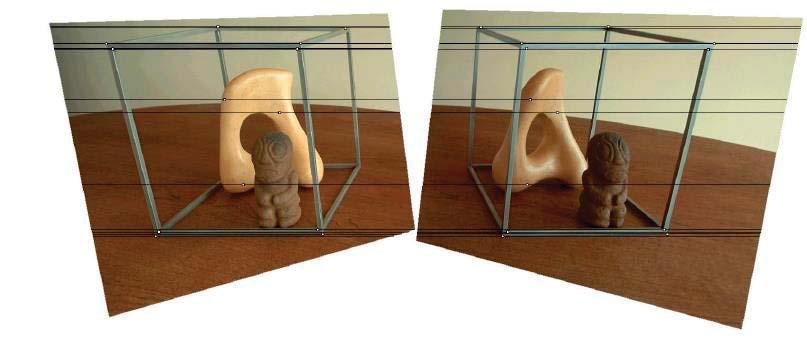
22 Playing with Perspective Perspective gives us very strong depth cues hence we can perceive a 3D scene by viewing its 2D representation (i.e. image) An example where perception of 3D scenes is misleading: Ames room A clip from "The computer that ate Hollywood" documentary. Dr. Vilayanur S. Ramachandran.
23 Outline of this lecture Perspective camera model Lens distortion Camera calibration DLT algorithm
24 Figure 1: Perspective imaging geometry showing relationship between 3D points and image plane points. 1 Camera Model and Perspective Transform We typically use a pinhole camera model that maps points in a 3-D camera frame to a 2-D projected image frame. In figure 1, we have a 3D camera coordinate frame X c, Y c, Z c with origin O c, and an image coordinate frame X i, Y i, Z i with origin O i. The focal length is f. Using similar triangles, we can relate image plane and world space coordinates. We have a 3D point P = (X, Y, Z) which projects onto the image plane at P = (x, y, f). O c is the origin of the camera coordinate system, known as the center of projection (COP) of the camera. Using similar triangles, we can write down the folowing relationships: X x = Z f ; Y y = Z f ; x = f X Z ; y = f Y Z If f = 1, note that perspective projection is just scaling a world coordinate by its Z value. Also note that all 3D points along a line from the COP through a designated position (x, y) on the image plane will have the same image plane coordinates. We can also describe perspective projection by the matrix equation: 1
25 x y 1 s x s y s = f f X Y Z 1 where s is a scaling factor and [x, y, 1] T are the projected coordinates in the image plane. We can generate image space coordinates from the projected camera space coordinates. These are the actual pixels values that you use in image processing. Pixels values (u, v) are derived by scaling the camera image plane coordinates in the x and y directions (for example, converting mm to pixels), and adding a translation to the origin of the image space plane. We can call these scale factors D x and D y, and the translation to the origin of the image plane as (u 0, v 0 ). If the pixel coordinates of a projected point (x,y) are (u,v) then we can write: x D x = u u 0 ; y D y = v v 0 ; u = u 0 + x D x ; v = v 0 + y D y where D x, D y are the physical dimensions of a pixel and (u 0, v 0 ) is the origin of the pixel coordinate system. x D x and y D y are simply the number of pixels, and we center them at the pixel coordinate origin. We can also put this into matrix form as: s u s v s = 1 D x 0 u D y v s x s y s u v 1 s u s v s = 1 D x 0 u D y v f f X Y Z 1 image P = image T persp persp T camera camera P In the above, we assumed that the point to be imaged was in the camera coordinate system. If the point is in a previously defined world coordinate system, then we also have to add in a standard 4x4 transform to express the world coordinate point in camera coordinates: 2
26 u v 1 = s u s v s = 1 D x 0 u D y v f f r 11 r 12 r 13 t x r 21 r 22 r 23 t y r 31 r 32 r 33 t z w X w Y w Z 1 image P = image T persp persp T camera camera T world world P Summing all this up, we can see that we need to find the following information to transform an arbitrary 3D world point to a designated pixel in a computer image: 6 parameters that relate the 3D world point to the 3D camera coordinate system (standard 3 translation and 3 rotation): (R, T ) Focal Length of the camera: f Scaling factors in the x and y direcitons on the image plane: (D x, D y ) Translation to the origin of the image plane: (u 0, v 0 ). This is 11 parameters in all. We can break these parameters down into Extrinsic parameters which are the 6-DOF transform between the camera coordinate system and the world coordinate system, and the Intrinsic parameters which are unique to the actual camera being used, and include the focal length, scaling factors, and location of the origin of the pixel coordinate system. 2 Camera Calibration Camera calibration is used to find the mapping from 3D to 2D image space coordinates. There are 2 approaches: Method I: Find both extrinsic and intrinsic parameters of the camera system. However, this can be difficult to do. The instinsic parameters of the camera may be unknown (i.e. focal length, pixel dimension) and the 6-DOF transform also may be difficult to calculate directly. Method 2: An easier method is the Lumped or Direct Linear Transform (DLT) method. Rather than finding individual parameters, we find a composite matrix that relates 3D to 2D. Given the equation below: image P = image T persp persp T camera camera T world world P we can lump the 3 T matrices into a 3x4 calibration matrix C: image P = C world P C = image T persp persp T camera camera T world 3
27 C is a single 3 4 transform that we can calculate empirically. 3 4 {}}{ [ C ] 4 1 {}}{ x y z 1 }{{} 3-D homo. vec = 3 1 { }} { u v w }{{} 2-D homo. vec u v 1 }{{} Pixels where u = u w v = v w Multiplying out the equations, we get: Substituting u = u w and v = v w, we get: c 11 x + c 12 y + c 13 z + c 14 = u c 21 x + c 22 y + c 23 z + c 24 = v c 31 x + c 32 y + c 33 z + c 34 = w 1. c 11 x + c 12 y + c 13 z + c 14 = u (c 31 x + c 32 y + c 33 z + c 34 ) 2. c 21 x + c 22 y + c 23 z + c 24 = v (c 31 x + c 32 y + c 33 z + c 34 ) How to interpret 1 and 2: 1. If we know all the c ij and x, y, z, we can find u, v. This means that if we know calibration matrix C and a 3-D point, we can predict its image space coordinates. 2. If we know x, y, z, u, v, we can find c ij. Each 5-tuple gives 2 equations in c ij. This is the basis for empirically finding the calibration matrix C (more on this later). 3. If we know c ij, u, v, we have 2 equations in x, y, z. They are the equations of 2 planes in 3-D. 2 planes form an intersecton which is a line. These are the equations of the line emanating from the center of projection of the camera, through the image pixel location u, v and which contains point x, y, z. 4
28 We can set up a linear system to solve for c ij : AC = B x 1 y 1 z u 1x u 1y u 1z x 1 y 1 z 1 1 v 1x v 1y v 1z x 2 y 2 z u 2x u 2y u 2z x 2 y 2 z 2 1 v 2x v 2y v 2z c 11 c 12 c 13 c 14 c 21 c 22 c 23 c 24 c 31 c 32 c 33 }{{} We can assume c 34 =1 = u 1 v 1 u 2 v 2 u 3 v 3... u N v N Each set of points x, y, z, u, v yields 2 equations in 11 unknowns (the c ij s). To solve for C, A needs to be invertible (square). We can overdetermine A and find a Least- Squares fit for C by using a pseudo-inverse solution. If A is N 11, where N > 11, AC = B A T AC = A T B C = (A T A) 1 }{{} pseudo inverse A T B 5
29 The camera perspective camera For convenience, the image plane is usually represented in front of C such that the image preserves the same orientation (i.e. not flipped) A camera does not measure distances but angles! u Z c = optical axis Z c P c v O = principal point f O p Image plane (CCD) C Y c X c C = optical center = center of the lens
30 Perspective projection from scene points to pixels The Camera point projects to onto the image plane From similar triangles: x f X Z c c Similarly, in the general case: x fx Z c c X c Zc C f x O Image Plane X c y f Y Z c c y fy Z c c 30
31 Perspective projection from scene points to pixels To convert, from the local image plane coordinates to the pixel coordinates, we need to account for: The pixel coordinates of the camera optical center Scale factor for the pixel-size (0,0) u + + v O y Image plane (u 0,v 0 ) x p Use Homogeneous Coordinates for linear mapping from 3D to 2D, by introducing an extra element (scale): u p v u ~ u ~ p v~ v ~ w 1 31
32 Expressed in matrix form and homogeneous coordinates: Or alternatively 32 Perspective projection from scene points to pixels c c c Z Y X v kf u kf v u c c c c c c Z Y X K Z Y X v u v u Focal length in pixels Intrinsic parameters matrix P c C O u v p Z c f X c Y c + +
33 33 Perspective projection from scene points to pixels c c c Z Y X K v u 1 Perspective Projection Matrix 1 1 w w w Z Y X RT K v u t t t Z Y X r r r r r r r r r Z Y X w w w c c c 1 w w w Z Y X T R P c O u v p X c C Z c Y c [RT] Extrinsic Parameters W Z w Y w X w = P w
34 Outline of this lecture Perspective camera model Lens distortion Camera calibration DLT algorithm Stereo vision

35 Perspective projection radial distortion No distortion Barrel distortion Pincushion 35
36 Perspective projection radial distortion The standard model of radial distortion is a transformation from the ideal coordinates (i.e., undistorted) to the real observable coordinates (distorted) The amount of distortion of the coordinates of the observed image is a nonlinear function of their radial distance. For most lenses, a simple quadratic model of distortion produces good results where 36
37 To recap, a 3D world point projects into the image point where and is the depth ( ) of the scene point If we want to take into account for the radial distortion, then the distorted coordinates (in pixels) can be obtained as where 1 1 w w w Z Y X T R K v u p Summary: Perspective projection equations v u K
38 Outline of this lecture Perspective camera model Lens distortion Camera calibration DLT algorithm Stereo vision


39 Camera Calibration Procedure to determine the intrinsic parameters of a camera

40 Camera Calibration Use camera model to interpret the projection from world to image plane Using known correspondences of p P, we can compute the unknown parameters K, R, T by applying the perspective projection equation so associate known, physical distances in the world to pixel-distances in image Projection Matrix X u Y v K RT Z 1 1 w w w
41 Camera Calibration (Direct Linear Transform (DLT) algorithm) X u We know that : Y v K RT Z 1 1 So there are 11 values to estimate: (the overall scale doesn t matter, so e.g. m 34 could be set to 1) u m v m m Each observed point gives us a pair of equations: u v i i ui vi m m X m X m i 31 i 31 m12yi m m m w w w 33 m22yi m m m Zi m m Zi m m X Y Z 1 To estimate 11 unknowns, we need at least? 6 points to calibrate the camera solved using linear least squares m m m m m m m m m w w w
42 Camera Calibration (Direct Linear Transform (DLT) algorithm) u m v m m m m m m m m m m m X Y Z 1 X w Yw K[ R T ] Z w 1 what we obtained: the 3x4 projection matrix, what we need: its decomposition into the camera calibration matrix K, and the rotation R and position T of the camera w w w Use QR factorization to decompose the 3x3 submatrix (m 11:33 ) into the product of an upper triangular matrix K and a rotation matrix R (orthogonal matrix) The translation T can subsequently be obtained by: T K 1 m m m
43 Outline of this lecture Perspective camera model Lens distortion Camera calibration DLT algorithm Stereo vision
44 Stereo Vision versus Structure from Motion Stereo vision: is the process of obtaining depth information from a pair of images coming from two cameras that look at the same scene from different but known positions Structure from Motion: is the process of obtaining depth and motion information from a pair of images coming from the same camera that looks at the same scene from different positions 45
45 Depth from Stereo From a single camera, we can only deduct the ray on which each image point lies With a stereo camera (binocular), we can solve for the intersection of the rays and recover the 3D structure 3D Object Left Image Right Image Left Center of projection Right Center of projection

46 The human binocular system Stereopsys: the brain allows us to see the left and right retinal images as a single 3D image The images project on our retina up-side-down but our brains lets us perceive them as «straight». Radial disotion is also removed. This process is called «rectification»
47 The human binocular system Stereopsys: the brain allows us to see the left and right retinal images as a single 3D image The images project on our retina up-side-down but our brains lets us perceive them as «straight». Radial disotion is also removed. This process is called «rectification» Make a simple test: 1. Fix an object 2. Open and close alternatively the left and right eyes. The horizontal displacement is called disparity The smaller the disparity, the farther the object



48 The human binocular system Stereopsys: the brain allows us to see the left and right retinal images as a single 3D image The images project on our retina up-side-down but our brains lets us perceive them as «straight». Radial disotion is also removed. This process is called «rectification» disparity Make a simple test: 1. Fix an object 2. Open and close alternatively the left and right eyes. The horizontal displacement is called disparity The smaller the disparity, the farther the object
49 4c 40 Stereo Vision - The simplified case 4c - Perception - Vision The simplified case is an ideal case. It assumes that both cameras are identical and are aligned on a horizontal axis Z P ( X P, YP, ZP) f Z f Z From Similar Triangles: P P ul X P ur b X P Z P bf u u l r f C l u l b Baseline distance between the optical centers of the two cameras u r C r X Disparity difference in image location of the projection of a 3D point in two image planes R. Siegwart, D. Scaramuzza and M.Chli, ETH Zurich -
50 4c 41 Stereo Vision facts 4c - Perception - Vision Z P u l bf u r 1. Depth is inversely proportional to disparity Foreground objects have bigger disparity than background objects 2. Disparity is proportional to stereo-baseline b ( u u r) The smaller the baseline b the more uncertain our estimate of depth However, as b is increased, some objects may appear in one camera, but not in the other (remember both cameras have parallel optical axes) 3. The projections of a single 3D point onto the left and the right stereo images are called correspondence pair l R. Siegwart, D. Scaramuzza and M.Chli, ETH Zurich -
51 Choosing the Baseline What s the optimal baseline? Too small: Large depth error Can you quantify the error as a function of the disparity? Too large: Minimum measurable distance increases Difficult search problem for close objects Large Baseline Small Baseline

52 Stereo Vision general case Two identical cameras do not exist in nature! Aligning both cameras on a horizontal axis is very difficult In order to use a stereo camera, we need to know the intrinsic extrinsic parameters of each camera, that is, the relative pose between the cameras (rotation, translation) We can solve for this through camera calibration ( X w, Yw, Zw) 51
53 To estimate the 3D position of we can construct the system of equations of the left and right camera Triangulation is the problem of determining the 3D position of a point given a set of corresponding image locations and known camera poses. 52 Stereo Vision general case ),, ( w w w Z Y X T Z Y X R K v u p w w w r r r r r 1 ~ w w w l l l l l Z Y X K v u p 1 ~ Left camera: set the world frame to coincide with the left camera frame Right camera:


54 Correspondence Search the problem Goal: identify corresponding points in the left and right images, which are the reprojection of the same 3D scene point Typical similarity measures: Normalized Cross-Correlation (NCC), Sum of Squared Differences (SSD), Sum of Absolute Differences (SAD), Census Transform Exhaustive image search can be computationally very expensive! Can we make the correspondence search in 1D? 53
55 Similarity measures Sum of Squared Differences (SSD) Sum of Absolute Differences (SAD) (used in optical mice) k k u k k v v u F v u H SSD 2 ), ( ), ( k k u k k v v u F v u H SAD ), ( ), (
56 Similarity measures For slight invariance to intensity changes, the Zero-mean Normalized Cross Correlation (ZNCC) is widely used k k u k k v F k k u k k v H k k u k k v F H v u F v u H v u F v u H ZNCC 2 2 ), ( ), ( ), ( ), ( ), ( 1 2 ), ( N v u F N v u H k k u k k v F k k u k k v H
57 Correspondence Problem Exhaustive image search can be computationally very expensive! Can we make the correspondence search in 1D? Potential matches for have to lie on the corresponding epipolar line The epipolar line is the projection of the infinite ray corresponding to in the other camera image The epipole is the projection of the optical center in in the other camera image = = epipolar line C l = epipole C r
58 Correspondence Search the epipolar constraint The epipolar plane is defined by the image point and the optical centers Impose the epipolar constraint to aid matching: search for a correspondence along the epipolar line epipolar line epipolar plane epipolar line C l C r 55
59 Correspondence Search the epipolar constraint Thanks to the epipolar constraint, corresponding points can be searched for, along epipolar lines computational cost reduced to 1 dimension! 56


60 Example: horizontally aligned cameras Left image Right image
61 Stereo Rectification Even in commercial stereo cameras the left and right image are never perfectly aligned In practice, it is convenient if image scanlines are the epipolar lines Stereo rectification warps the left and right images into new rectified images, whose epipolar lines are aligned to the baseline
62 Stereo Rectification Reprojects image planes onto a common plane parallel to the baseline It works by computing two homographies (image warping), one for each input image reprojection As a result, the new epipolar lines are horizontal and the scanlines of the left and right image are aligned

63 Epipolar Rectification - Example First, remove radial distortion Left Right 62

 and")
64 Epipolar Rectification - Example First, remove radial distortion Then, compute homographies (warping) and rectify Left Right 63

65 Stereo Rectification: example


66 Stereo Vision disparity map The disparity map holds the disparity value at every pixel: Identify correspondent points of all image pixels in the original images Compute the disparity for each pair of correspondences Usually visualized in gray-scale images Close objects experience bigger disparity; thus, they appear brighter in disparity map Left image Right image Disparity Map 65

67 Stereo Vision disparity map The disparity map holds the disparity value at every pixel: Identify correspondent points of all image pixels in the original images Compute the disparity for each pair of correspondences Usually visualized in gray-scale images Close objects experience bigger disparity; thus, they appear brighter in disparity map From the disparity, we can compute the depth as: Z bf u l u r 66
68 Stereo Vision - summary 3D Object Left Image Right Image 1. Stereo camera calibration compute camera relative pose 2. Epipolar rectification align images & epipolar lines 3. Search for correspondences 4. Output: compute stereo triangulation or disparity map

69 Correspondence problem Now that the left and right images are rectified, the correspondence search can be done along the same scanlines

70 Correspondence problem If we look at the intensity profiles of two corresponding scanlines, there is a clear correspondence between intensities but also noise and ambiguities

71 Correlation-based window matching
 Textureless regions are non-distinct; high ambiguity for")
72 Correspondence Problems: Textureless regions (the aperture problem) Textureless regions are non-distinct; high ambiguity for matches.
73 Solution: increase window size

74 Effects of window size W Smaller window + More detail More noise W = 3 W = 20 Larger window + Smoother disparity maps Less detail

75 Failures of correspondence search Textureless surfaces Occlusions, repetition
76 How can we improve window-based matching? Beyond the epipolar constraint, there are soft constraints to help identify corresponding points Uniqueness Only one match in right image for every point in left image Ordering Points on same surface will be in same order in both views Disparity gradient Disparity changes smoothly between points on the same surface Grauman


77 Results with window search Data Window-based matching Ground truth
78 Better methods exist... Graph cuts Ground truth Y. Boykov, O. Veksler, and R. Zabih, Fast Approximate Energy Minimization via Graph Cuts, PAMI 2001 For code, datasets, and comparisons all the algorithms:
 use feature descriptor and an associated similarity metrics Still use epipolar geometry to narrow the search")
79 Sparse correspondence search Restrict search to sparse set of detected features Rather than pixel values (or lists of pixel values) use feature descriptor and an associated similarity metrics Still use epipolar geometry to narrow the search further
80 Stereo Vision - summary 3D Object Left Image Right Image 1. Stereo camera calibration compute camera relative pose 2. Epipolar rectification align images & epipolar lines 3. Search for correspondences 4. Output: compute stereo triangulation or disparity map 5. Consider how baseline & image resolution affect accuracy of depth estimates
81 SFM: Structure From Motion (watch video segment) Given image point correspondences, x i x i /, determine R and T Keep track of point trajectories over multiple views to reconstruct scene structure and motion x x / C (R,T) C /
Perception II: Pinhole camera and Stereo Vision
 Perception II: Pinhole camera and Stereo Vision Daide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Mobile Robot Control Scheme knowledge, data base mission commands Localization
Perception II: Pinhole camera and Stereo Vision Daide Scaramuzza Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Mobile Robot Control Scheme knowledge, data base mission commands Localization
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Rectification and Disparity
 Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Rectification and Disparity Nassir Navab Slides prepared by Christian Unger What is Stereo Vision? Introduction A technique aimed at inferring dense depth measurements efficiently using two cameras. Wide
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Stereo CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Why do we perceive depth? What do humans use as depth cues? Motion Convergence When watching an object close to us, our eyes
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Lecture 14: Computer Vision
 CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
CS/b: Artificial Intelligence II Prof. Olga Veksler Lecture : Computer Vision D shape from Images Stereo Reconstruction Many Slides are from Steve Seitz (UW), S. Narasimhan Outline Cues for D shape perception
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Machine vision. Summary # 11: Stereo vision and epipolar geometry. u l = λx. v l = λy
 1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
1 Machine vision Summary # 11: Stereo vision and epipolar geometry STEREO VISION The goal of stereo vision is to use two cameras to capture 3D scenes. There are two important problems in stereo vision:
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Lecture 14: Basic Multi-View Geometry
 Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Lecture 14: Basic Multi-View Geometry Stereo If I needed to find out how far point is away from me, I could use triangulation and two views scene point image plane optical center (Graphic from Khurram
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1)
 (New book: 7.2.1, old book: 11.1)") Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
Image Rectification (Stereo) (New book: 7.2.1, old book: 11.1) Guido Gerig CS 6320 Spring 2013 Credits: Prof. Mubarak Shah, Course notes modified from: http://www.cs.ucf.edu/courses/cap6411/cap5415/, Lecture
3D Vision Real Objects, Real Cameras. Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun,
, 12 (parts of) Computerized Image Analysis MN2 Anders Brun,") 3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Lecture'9'&'10:'' Stereo'Vision'
 Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Lecture'9'&'10:'' Stereo'Vision' Dr.'Juan'Carlos'Niebles' Stanford'AI'Lab' ' Professor'FeiAFei'Li' Stanford'Vision'Lab' 1' Dimensionality'ReducIon'Machine'(3D'to'2D)' 3D world 2D image Point of observation
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration
 MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
MAN-522: COMPUTER VISION SET-2 Projections and Camera Calibration Image formation How are objects in the world captured in an image? Phsical parameters of image formation Geometric Tpe of projection Camera
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
CMPSCI 670: Computer Vision! Image formation. University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji
 CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
Rectification. Dr. Gerhard Roth
 Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
Rectification Dr. Gerhard Roth Problem Definition Given a pair of stereo images, the intrinsic parameters of each camera, and the extrinsic parameters of the system, R, and, compute the image transformation
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
MAPI Computer Vision. Multiple View Geometry
 MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
MAPI Computer Vision Multiple View Geometry Geometry o Multiple Views 2- and 3- view geometry p p Kpˆ [ K R t]p Geometry o Multiple Views 2- and 3- view geometry Epipolar Geometry The epipolar geometry
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
CS 664 Slides #9 Multi-Camera Geometry. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
CS 664 Slides #9 Multi-Camera Geometry Prof. Dan Huttenlocher Fall 2003 Pinhole Camera Geometric model of camera projection Image plane I, which rays intersect Camera center C, through which all rays pass
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Stereo Vision Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Module 4F12: Computer Vision and Robotics Solutions to Examples Paper 2
 Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered