Rational Trigonometry Applied to Robotics
|
|
|
- Hilary Copeland
- 5 years ago
- Views:
Transcription
1 Robot Kinematic Modeling using Rational Trigonometry 6 de Novembro de 2007
2 Overview Overview 1 Overview 2 3 The Fixed Frames Model for Robot Kinematics 4 Conclusions 4 Perspectives and Future Work 5 Q&A
3 Definition Definition Rational Trigonometry is the study of triangles using spreads and quadrances. It is a formal framework for geometrical analysis; It revisits old concepts in a new way.
4 Quadrance Definition Q(A, B) (B 1 A 1 ) 2 + (B 2 A 2 ) (B n A n ) 2 (1) A simpler concept than distance as it avoids the square root function; A metric for separation of points; Cannot be added like distances can (i.e., Q(A, C) Q(A, B) + Q(B, C)).
5 ions, Rational Trigonometry is nowapplied essentially to Robotics irrelevant. ed adjacent Spread to small straight line segments joining the sual circular arcs used to denote angles. There are fo ead, each equivalent, as in Figure 1.3. Definition l 2 l 1 a 1 x + b 1 y + c 1 = 0 s s s s l 1 2. l 2 a 2 x + b 2 y + c 2 = 0 s(l 1, l 2 ) (a 1b 2 a 2 b 1 ) 2 (a b2 1 )(a2 2 + b2 2 ) (2) re 1.3: Four possible labellings
6 Spread, Cross and Twist Definition S(l 1, l 2 ) Q(B, C) Q(A, B) = Q R (3) C(l 1, l 2 ) 1 S(l 1, l 2 ) (4) T (l 1, l 2 ) S(l 1, l 2 ) C(l 1, l 2 ) (5) Unambiguous measure for line separation; Simpler expressions than those obtained with classical trigonometry.
7 Drawing a circle { x = 1 S y = S
8 Drawing a circle { x = 1 S y = S
9 Drawing a circle { x = 1 S y = S
10 Drawing a circle { x = 1 S y = S
11 Drawing a circle Problem In order to draw a circle, we needed 4 reflections of the same values; These reflections depend on the reference frames used. Solution Use an expansion matrix to represent the reference frame and the consequent reflections: The Reference Frame Matrix.
12 Reference Frame Matrices Reference Frame Matrices allow the expansion of values common in all sections of space. They also provide a representation of the reference frame used in a problem. Example 1 1 [ ] S S 1 1 The Cartesian Reference Frame
13 3D Example: A Sphere (1 Sθ )S ϕ Sθ S ϕ (1 Sϕ )
14 Representing Attitude Using conventional representations for attitude (e.g. Euler angles) there are infinite angles for a given attitude whereas using spreads they are finite. Again, since spread only covers part of the sphere, one can use the same reasoning and expand angles like position: [ α β γ ] = = S 1 (s α ) S 1 (s β ) S 1 (s γ ) 0 0 1
15 Point Addressing As single values of spread expand to multiple values of position, addressing is required for unique values. Since these expanded values are obtained using Reference Frame Matrices, one can simply use a line selecting matrix: [ ] R
16 The Joint Equation If we use a Base Matrix with the values to be expanded, the following definition emerges: Definition An actuator point P in a generic Reference Frame R can be calculated by its polar components in a base matrix B using: P = L R B Where L is a line selecting matrix.

17 Combining sets of points Using the L R B notation, one can access any reflection of any reference frame. By combining each reflection with every other, all workspace is covered. How to obtain these combinations?

18 Notation for robotic structures
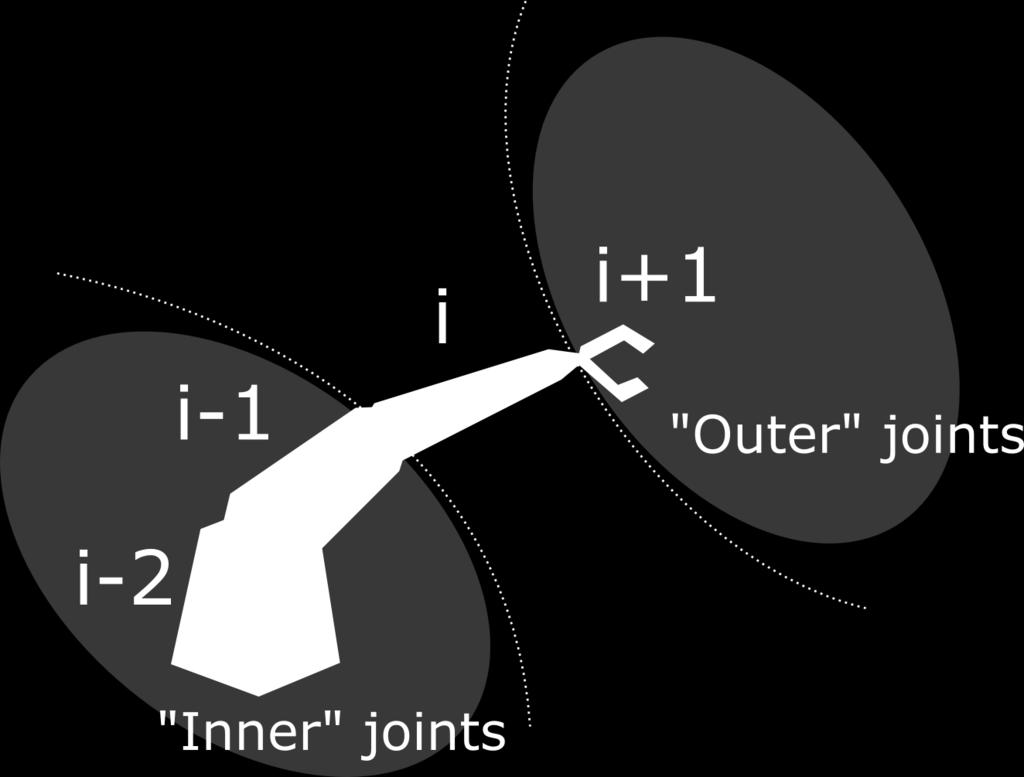
19 The operation is similar to the Cartesian Product of Sets, but since each set is a matrix and each element is a line of that matrix, using some algebra tricks one can use the following formula on the points P i = L R B: Definition M j = [δ 1j δ 2j... δ rank(li ),j], δ ij = 1 if i = j, 0 otherwise b Sol(a, b) = rank(l i ); i=a I = Sol(1, i 1); O = Sol(i + 1, n); rank(l i ) Pi = (M j P i ones(i, 1) Mj T ) ones(o, 1) j=1
20 M j Explained Definition M j = [δ 1j δ 2j... δ rank(li ),j], δ ij = 1 if i = j, 0 otherwise M j is a line matrix with a one (1) on the jth entry. This matrix is used to access each line of an L R B point. δ ij denotes the Kronecker Delta.
21 Sol(a, b) Explained Definition b Sol(a, b) = rank(l i ); i=a The Sol function simply counts the number of possible combinations in a set from the element indexed by a to the element indexed by b. Since the set is a matrix, it s rank provides the number of tuples present (note that rank(l i ) = rank(p i )).
22 I and O Explained Definition I = Sol(1, i 1); O = Sol(i + 1, n); Given a joint at index i, I has the inner possible solutions (solutions toward index i = 0) and O has the outer possible solutions.
23 P i Explained Definition Pi = rank(l i ) j=1 (M j P i ones(i, 1) Mj T ) ones(o, 1) This is a cooked up expression divided into two main blocks: the first, involving the inner combinations (I ), repeats each tuple in consecutive lines I times. The second, involving the outer combinations (O), repeats each block of tuples O times. Note that if O = I = 1, Pi = P i, this being the most common situation.
24 The Fixed Frames Model for Robot Kinematics The Fixed Frames Model for Robot Kinematics Using the proposed framework transformation matrices are very complex so a new approach was tested: Reference frames are kept fixed with equal attitude referring to the workspace reference frame.
25 The Fixed Frames Model for Robot Kinematics Representing Robotic Structures using FFM So far, all expressions were valid for both Quadrances and Distances. But as we apply this model to the real world, using Distance is again more useful. By keeping Reference Frames with equal attitude, the effect of their motion can be calculated using simple addition since all axis are parallel.
26 The Fixed Frames Model for Robot Kinematics Processing sensor data If reference frames do not rotate and sensors do, a correction must be applied to the data from and to the actual robot: Θ c = C Θ s + Θ offset Typically, a C matrix will have a very specific structure, e.g., C =
27 The Fixed Frames Model for Robot Kinematics Series Manipulators A Series manipulator P f1 = P1 P f2 = P1 + P 2... P fn = P1 + P P J P f P f2. = I Sol(1,n) P fn P 1 P 2. P n
28 The Fixed Frames Model for Robot Kinematics Parallel Manipulators A parallel manipulator P3 = 1 2 [ 1 1 ] ISol(1,n) [ P1 P2 ]
 P1 P2 P3")
29 The Fixed Frames Model for Robot Kinematics Complex Examples P f 1 P f 2 P f 3 P f 4 P f 5 = I Sol(1,n) P1 P2 P3 P4
30 The Fixed Frames Model for Robot Kinematics The Structure Equation As shown in the previous examples, a pattern emerges whenever one tries to solve a particular structure, always involving a matrix with a very similar structure. Definition A Structure Matrix S relates single joint points P i to each other according to a Robot s Structure to obtain workspace points P fi. P fi = S P i
31 The Fixed Frames Model for Robot Kinematics Analysis of constraints A robot structure may have three kinds of constraints: Workspace constraints that limit the possible poses of the robot in a given workspace; Actuator constraints that limit the command and sensor values to a limited range; Structural constraints limit the poses that a robot can assume due to connections between parts of its structure, limiting its motion.
32 The Fixed Frames Model for Robot Kinematics Constraint analysis equations The following equations were obtained to describe each of the constraints: P Pf P W i [1,n] θ i A i (6) D D σ = K K D = P f (7)
33 The Fixed Frames Model for Robot Kinematics Application example σ = D D σ = K K [ ] P1 D = P 2, = [ 1 1 ], K = [ R 3 ] (P 1 P 2 ) (P 1 P 2 ) = [ R 3 ] [ R3 ]
34 The Fixed Frames Model for Robot Kinematics Compact Form This method can be summed up in 4 main equations: The Joint Equation and perm function P i = perm(l i R i B i ) The Structure Equation P f = S P The Sensor-Actuator Equation Θ c = C Θ s + Θ offset P Pf P W The Constraint Equations i [1,n] θ i A i D D σ = K K
35 The Fixed Frames Model for Robot Kinematics Conclusions This framework provides: A straightforward way to approach any robotic structures in a generic way; An algebraic representation that allows a global perspective of the problems at hand (e.g. the existence of redundant solutions).
36 Perspectives and Future Work Perspectives and Future Work Perspectives: It s clear that using this framework the inversion of cinematic models might be simplified for many cases and current work involves optimizing this inversion in a global way; Computational versions are easy to obtain and implement. Future Work Current plans include solving the inverse model in an optimal way (hopefully globally optimal) Implement a working toolbox for MatLab/Octave and/or a library for C/C++/Java Developments available online at
37 Q&A Q&A? <3
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics of a Rhino Robot
 Inverse Kinematics of a Rhino Robot Rhino Robot (http://verona.fi-p.unam.mx/gpocontrol/images/rhino1.jpg) A Rhino robot is very similar to a 2-link arm with the exception that The base can rotate, allowing
Inverse Kinematics of a Rhino Robot Rhino Robot (http://verona.fi-p.unam.mx/gpocontrol/images/rhino1.jpg) A Rhino robot is very similar to a 2-link arm with the exception that The base can rotate, allowing
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Transformation. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Transformation Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Announcement Project
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Using Algebraic Geometry to Study the Motions of a Robotic Arm
 Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
Using Algebraic Geometry to Study the Motions of a Robotic Arm Addison T. Grant January 28, 206 Abstract In this study we summarize selected sections of David Cox, John Little, and Donal O Shea s Ideals,
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING. Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582
 ROBOT ENGINEERING Dr. Stephen Bruder Course Information Robot Engineering Classroom UNM: Woodward Hall room 147 NMT: Cramer 123 Schedule Tue/Thur 8:00 9:15am Office Hours UNM: After class 10am Email bruder@aptec.com
ROBOT ENGINEERING Dr. Stephen Bruder Course Information Robot Engineering Classroom UNM: Woodward Hall room 147 NMT: Cramer 123 Schedule Tue/Thur 8:00 9:15am Office Hours UNM: After class 10am Email bruder@aptec.com
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Kinematic Synthesis. October 6, 2015 Mark Plecnik
 Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematic Synthesis October 6, 2015 Mark Plecnik Classifying Mechanisms Several dichotomies Serial and Parallel Few DOFS and Many DOFS Planar/Spherical and Spatial Rigid and Compliant Mechanism Trade-offs
Kinematics of the Stewart Platform (Reality Check 1: page 67)
") MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
MATH 5: Computer Project # - Due on September 7, Kinematics of the Stewart Platform (Reality Check : page 7) A Stewart platform consists of six variable length struts, or prismatic joints, supporting a
Planar Robot Kinematics
 V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
DD2429 Computational Photography :00-19:00
 . Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
. Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ x + 5y + 7z 9x + 3y + 11z
 Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Basic Linear Algebra Linear algebra deals with matrixes: two-dimensional arrays of values. Here s a matrix: [ 1 5 ] 7 9 3 11 Often matrices are used to describe in a simpler way a series of linear equations.
Section 10.1 Polar Coordinates
 Section 10.1 Polar Coordinates Up until now, we have always graphed using the rectangular coordinate system (also called the Cartesian coordinate system). In this section we will learn about another system,
Section 10.1 Polar Coordinates Up until now, we have always graphed using the rectangular coordinate system (also called the Cartesian coordinate system). In this section we will learn about another system,
Animation. CS 4620 Lecture 33. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
Animation CS 4620 Lecture 33 Cornell CS4620 Fall 2015 1 Announcements Grading A5 (and A6) on Monday after TG 4621: one-on-one sessions with TA this Friday w/ prior instructor Steve Marschner 2 Quaternions
The University of Missouri - Columbia Electrical & Computer Engineering Department EE4330 Robotic Control and Intelligence
 The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
Position Analysis
 Position Analysis 2015-03-02 Position REVISION The position of a point in the plane can be defined by the use of a position vector Cartesian coordinates Polar coordinates Each form is directly convertible
Position Analysis 2015-03-02 Position REVISION The position of a point in the plane can be defined by the use of a position vector Cartesian coordinates Polar coordinates Each form is directly convertible
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
3. Manipulator Kinematics. Division of Electronic Engineering Prof. Jaebyung Park
 3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
3. Manipulator Kinematics Division of Electronic Engineering Prof. Jaebyung Park Introduction Kinematics Kinematics is the science of motion which treats motion without regard to the forces that cause
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
ME5286 Robotics Spring 2014 Quiz 1 Solution. Total Points: 30
 Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
7 th Grade Accelerated Learning Targets Final 5/5/14
 7 th Grade Accelerated Learning Targets Final 5/5/14 BSD Grade 7 Long Term Learning Targets & Supporting Learning Targets Quarter 1 & 2 Quarter 3 Quarter 4 7.02, 7.03, 7.04, 7.05 7.06, 8.04, 8.05 7.08,
7 th Grade Accelerated Learning Targets Final 5/5/14 BSD Grade 7 Long Term Learning Targets & Supporting Learning Targets Quarter 1 & 2 Quarter 3 Quarter 4 7.02, 7.03, 7.04, 7.05 7.06, 8.04, 8.05 7.08,
Mobile Robot Kinematics
 Mobile Robot Kinematics Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Kinematics is the most basic study of how mechanical systems behave required to design to control Manipulator
Mobile Robot Kinematics Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Kinematics is the most basic study of how mechanical systems behave required to design to control Manipulator
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Some algebraic geometry problems arising in the field of mechanism theory. J-P. Merlet INRIA, BP Sophia Antipolis Cedex France
 Some algebraic geometry problems arising in the field of mechanism theory J-P. Merlet INRIA, BP 93 06902 Sophia Antipolis Cedex France Abstract Mechanism theory has always been a favorite field of study
Some algebraic geometry problems arising in the field of mechanism theory J-P. Merlet INRIA, BP 93 06902 Sophia Antipolis Cedex France Abstract Mechanism theory has always been a favorite field of study
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Jacobian: Velocities and Static Forces /4 Models of Robot Manipulation - EE 54 - Department of Electrical Engineering - University of Washington Kinematics Relations - Joint & Cartesian Spaces A robot
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
Forward kinematics and Denavit Hartenburg convention
 Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Index Terms Denavit-Hartenberg Parameters, Kinematics, Pick and place robotic arm, Taper roller bearings. III. METHODOLOGY
 ISSN: 39-5967 ISO 9:8 Certified Volume 5, Issue 3, May 6 DESIGN OF A PROTOTYPE OF A PICK AND PLACE ROBOTIC ARM Amod Aboti, Sanket Acharya, Abhinav Anand, Rushikesh Chintale, Vipul Ruiwale Abstract In the
ISSN: 39-5967 ISO 9:8 Certified Volume 5, Issue 3, May 6 DESIGN OF A PROTOTYPE OF A PICK AND PLACE ROBOTIC ARM Amod Aboti, Sanket Acharya, Abhinav Anand, Rushikesh Chintale, Vipul Ruiwale Abstract In the
1 Trigonometry. Copyright Cengage Learning. All rights reserved.
 1 Trigonometry Copyright Cengage Learning. All rights reserved. 1.1 Radian and Degree Measure Copyright Cengage Learning. All rights reserved. Objectives Describe angles. Use radian measure. Use degree
1 Trigonometry Copyright Cengage Learning. All rights reserved. 1.1 Radian and Degree Measure Copyright Cengage Learning. All rights reserved. Objectives Describe angles. Use radian measure. Use degree
Applications. Human and animal motion Robotics control Hair Plants Molecular motion
 Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Multibody dynamics Applications Human and animal motion Robotics control Hair Plants Molecular motion Generalized coordinates Virtual work and generalized forces Lagrangian dynamics for mass points
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Inverse Kinematics of 6 DOF Serial Manipulator. Robotics. Inverse Kinematics of 6 DOF Serial Manipulator
 Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
2D transformations: An introduction to the maths behind computer graphics
 2D transformations: An introduction to the maths behind computer graphics Lecturer: Dr Dan Cornford d.cornford@aston.ac.uk http://wiki.aston.ac.uk/dancornford CS2150, Computer Graphics, Aston University,
2D transformations: An introduction to the maths behind computer graphics Lecturer: Dr Dan Cornford d.cornford@aston.ac.uk http://wiki.aston.ac.uk/dancornford CS2150, Computer Graphics, Aston University,
Drawing using the Scorbot-ER VII Manipulator Arm
 Drawing using the Scorbot-ER VII Manipulator Arm Luke Cole Adam Ferenc Nagy-Sochacki Jonathan Symonds cole@lc.homedns.org u2546772@anu.edu.au u3970199@anu.edu.au October 29, 2007 Abstract This report discusses
Drawing using the Scorbot-ER VII Manipulator Arm Luke Cole Adam Ferenc Nagy-Sochacki Jonathan Symonds cole@lc.homedns.org u2546772@anu.edu.au u3970199@anu.edu.au October 29, 2007 Abstract This report discusses
Mathematics Curriculum
 Mathematics Curriculum 2017-2018 Autumn 2017 Spring 2018 Summer 2018 Yr 7 Delta 1 (Higher) Mean, mode, median and range Analysing and displaying data Negative numbers Angle properties 2D shapes Rounding
Mathematics Curriculum 2017-2018 Autumn 2017 Spring 2018 Summer 2018 Yr 7 Delta 1 (Higher) Mean, mode, median and range Analysing and displaying data Negative numbers Angle properties 2D shapes Rounding
Mathematics Curriculum
 Mathematics Curriculum 2018-19 Autumn 2018 Spring 2019 Summer 2019 Yr 7 Delta 1 (Higher) Mean, mode, median and range Analysing and displaying data Negative numbers Angle properties 2D shapes Rounding
Mathematics Curriculum 2018-19 Autumn 2018 Spring 2019 Summer 2019 Yr 7 Delta 1 (Higher) Mean, mode, median and range Analysing and displaying data Negative numbers Angle properties 2D shapes Rounding
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer
 Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Lecture 3.5: Sumary of Inverse Kinematics Solutions
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3.5: Sumary of Inverse Kinematics Solutions Reading: SHV Sect.2.5.1, 3.3 Mechanical Engineering Hanz Richter, PhD MCE647 p.1/13 Inverse Orientation:
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3.5: Sumary of Inverse Kinematics Solutions Reading: SHV Sect.2.5.1, 3.3 Mechanical Engineering Hanz Richter, PhD MCE647 p.1/13 Inverse Orientation:
NATIONAL UNIVERSITY OF SINGAPORE. (Semester I: 1999/2000) EE4304/ME ROBOTICS. October/November Time Allowed: 2 Hours
 EE4304/ME ROBOTICS. October/November Time Allowed: 2 Hours") NATIONAL UNIVERSITY OF SINGAPORE EXAMINATION FOR THE DEGREE OF B.ENG. (Semester I: 1999/000) EE4304/ME445 - ROBOTICS October/November 1999 - Time Allowed: Hours INSTRUCTIONS TO CANDIDATES: 1. This paper
NATIONAL UNIVERSITY OF SINGAPORE EXAMINATION FOR THE DEGREE OF B.ENG. (Semester I: 1999/000) EE4304/ME445 - ROBOTICS October/November 1999 - Time Allowed: Hours INSTRUCTIONS TO CANDIDATES: 1. This paper
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
ME5286 Robotics Spring 2015 Quiz 1
 Page 1 of 7 ME5286 Robotics Spring 2015 Quiz 1 Total Points: 30 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Page 1 of 7 ME5286 Robotics Spring 2015 Quiz 1 Total Points: 30 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Transformations. Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico
 Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
Transformations Ed Angel Professor of Computer Science, Electrical and Computer Engineering, and Media Arts University of New Mexico Angel: Interactive Computer Graphics 4E Addison-Wesley 25 1 Objectives
To graph the point (r, θ), simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6. ) is graphed below:
, simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6. ) is graphed below:") Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Integrated Mathematics I Performance Level Descriptors
 Limited A student performing at the Limited Level demonstrates a minimal command of Ohio s Learning Standards for Integrated Mathematics I. A student at this level has an emerging ability to demonstrate
Limited A student performing at the Limited Level demonstrates a minimal command of Ohio s Learning Standards for Integrated Mathematics I. A student at this level has an emerging ability to demonstrate
Analysis of Euler Angles in a Simple Two-Axis Gimbals Set
 Vol:5, No:9, 2 Analysis of Euler Angles in a Simple Two-Axis Gimbals Set Ma Myint Myint Aye International Science Index, Mechanical and Mechatronics Engineering Vol:5, No:9, 2 waset.org/publication/358
Vol:5, No:9, 2 Analysis of Euler Angles in a Simple Two-Axis Gimbals Set Ma Myint Myint Aye International Science Index, Mechanical and Mechatronics Engineering Vol:5, No:9, 2 waset.org/publication/358
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
Kinematics of Closed Chains
 Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Trigonometry Review Day 1
 Name Trigonometry Review Day 1 Algebra II Rotations and Angle Terminology II Terminal y I Positive angles rotate in a counterclockwise direction. Reference Ray Negative angles rotate in a clockwise direction.
Name Trigonometry Review Day 1 Algebra II Rotations and Angle Terminology II Terminal y I Positive angles rotate in a counterclockwise direction. Reference Ray Negative angles rotate in a clockwise direction.
Graphics and Interaction Transformation geometry and homogeneous coordinates
 433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates
 COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer
 A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer Ambuja Singh Student Saakshi Singh Student, Ratna Priya Kanchan Student, Abstract -Robot kinematics the
A Review Paper on Analysis and Simulation of Kinematics of 3R Robot with the Help of RoboAnalyzer Ambuja Singh Student Saakshi Singh Student, Ratna Priya Kanchan Student, Abstract -Robot kinematics the
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Singularity Loci of Planar Parallel Manipulators with Revolute Joints
 Singularity Loci of Planar Parallel Manipulators with Revolute Joints ILIAN A. BONEV AND CLÉMENT M. GOSSELIN Département de Génie Mécanique Université Laval Québec, Québec, Canada, G1K 7P4 Tel: (418) 656-3474,
Singularity Loci of Planar Parallel Manipulators with Revolute Joints ILIAN A. BONEV AND CLÉMENT M. GOSSELIN Département de Génie Mécanique Université Laval Québec, Québec, Canada, G1K 7P4 Tel: (418) 656-3474,
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane?
 Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
DETC APPROXIMATE MOTION SYNTHESIS OF SPHERICAL KINEMATIC CHAINS
 Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
which is shown in Fig We can also show that the plain old Puma cannot reach the point we specified
 152 Fig. 7.8. Redundant manipulator P8 >> T = transl(0.5, 1.0, 0.7) * rpy2tr(0, 3*pi/4, 0); The required joint coordinates are >> qi = p8.ikine(t) qi = -0.3032 1.0168 0.1669-0.4908-0.6995-0.1276-1.1758
152 Fig. 7.8. Redundant manipulator P8 >> T = transl(0.5, 1.0, 0.7) * rpy2tr(0, 3*pi/4, 0); The required joint coordinates are >> qi = p8.ikine(t) qi = -0.3032 1.0168 0.1669-0.4908-0.6995-0.1276-1.1758
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
FOUNDATION HIGHER. F Autumn 1, Yr 9 Autumn 2, Yr 9 Spring 1, Yr 9 Spring 2, Yr 9 Summer 1, Yr 9 Summer 2, Yr 9
 Year: 9 GCSE Mathematics FOUNDATION F Autumn 1, Yr 9 Autumn 2, Yr 9 Spring 1, Yr 9 Spring 2, Yr 9 Summer 1, Yr 9 Summer 2, Yr 9 HIGHER Integers and place value Decimals Indices, powers and roots Factors,multiples
Year: 9 GCSE Mathematics FOUNDATION F Autumn 1, Yr 9 Autumn 2, Yr 9 Spring 1, Yr 9 Spring 2, Yr 9 Summer 1, Yr 9 Summer 2, Yr 9 HIGHER Integers and place value Decimals Indices, powers and roots Factors,multiples
Pi at School. Arindama Singh Department of Mathematics Indian Institute of Technology Madras Chennai , India
 Pi at School rindama Singh epartment of Mathematics Indian Institute of Technology Madras Chennai-600036, India Email: asingh@iitm.ac.in bstract: In this paper, an attempt has been made to define π by
Pi at School rindama Singh epartment of Mathematics Indian Institute of Technology Madras Chennai-600036, India Email: asingh@iitm.ac.in bstract: In this paper, an attempt has been made to define π by
Workspaces of planar parallel manipulators
 Workspaces of planar parallel manipulators Jean-Pierre Merlet Clément M. Gosselin Nicolas Mouly INRIA Sophia-Antipolis Dép. de Génie Mécanique INRIA Rhône-Alpes BP 93 Université Laval 46 Av. Felix Viallet
Workspaces of planar parallel manipulators Jean-Pierre Merlet Clément M. Gosselin Nicolas Mouly INRIA Sophia-Antipolis Dép. de Génie Mécanique INRIA Rhône-Alpes BP 93 Université Laval 46 Av. Felix Viallet
Advances in Engineering Research, volume 123 2nd International Conference on Materials Science, Machinery and Energy Engineering (MSMEE 2017)
") Advances in Engineering Research, volume nd International Conference on Materials Science, Machinery and Energy Engineering MSMEE Kinematics Simulation of DOF Manipulator Guangbing Bao,a, Shizhao Liu,b,
Advances in Engineering Research, volume nd International Conference on Materials Science, Machinery and Energy Engineering MSMEE Kinematics Simulation of DOF Manipulator Guangbing Bao,a, Shizhao Liu,b,
Determination of 6D-workspaces of Gough-type parallel. manipulator and comparison between different geometries. J-P. Merlet
 Determination of 6D-workspaces of Gough-type parallel manipulator and comparison between different geometries J-P. Merlet INRIA Sophia-Antipolis, France Abstract: We consider in this paper a Gough-type
Determination of 6D-workspaces of Gough-type parallel manipulator and comparison between different geometries J-P. Merlet INRIA Sophia-Antipolis, France Abstract: We consider in this paper a Gough-type
A Pair of Measures of Rotational Error for Axisymmetric Robot End-Effectors
 A Pair of Measures of Rotational Error for Axisymmetric Robot End-Effectors Sébastien Briot and Ilian A. Bonev Department of Automated Manufacturing Engineering, École de Technologie Supérieure (ÉTS),
A Pair of Measures of Rotational Error for Axisymmetric Robot End-Effectors Sébastien Briot and Ilian A. Bonev Department of Automated Manufacturing Engineering, École de Technologie Supérieure (ÉTS),
Stage 1 (intervention) Stage 2 Stage 3 Stage 4. Advanced 7-8. Secure 4-6
 Stage 2 Stage 3 Stage 4. Advanced 7-8. Secure 4-6") Stage 1 (intervention) Stage 2 Stage 3 Stage 4 YEAR 7 LAT Grade Emerging (not secondary read) 1-3 Secure 4-6 Advanced 7-8 Advanced + 9 YEAR 8 1 Emerging 2-3 Secure 4-6 Advanced 7-9 Autumn 1 Place Value
Stage 1 (intervention) Stage 2 Stage 3 Stage 4 YEAR 7 LAT Grade Emerging (not secondary read) 1-3 Secure 4-6 Advanced 7-8 Advanced + 9 YEAR 8 1 Emerging 2-3 Secure 4-6 Advanced 7-9 Autumn 1 Place Value
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
Measuring Lengths The First Fundamental Form
 Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
1. The Pythagorean Theorem
 . The Pythagorean Theorem The Pythagorean theorem states that in any right triangle, the sum of the squares of the side lengths is the square of the hypotenuse length. c 2 = a 2 b 2 This theorem can be
. The Pythagorean Theorem The Pythagorean theorem states that in any right triangle, the sum of the squares of the side lengths is the square of the hypotenuse length. c 2 = a 2 b 2 This theorem can be
To graph the point (r, θ), simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6
, simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6") Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Fundamentals of Robotics Study of a Robot - Chapter 2 and 3
 Fundamentals of Robotics Study of a Robot - Chapter 2 and 3 Sergi Valverde u1068016@correu.udg.edu Daniel Martínez u1068321@correu.udg.edu June 9, 2011 1 Introduction This report introduces the second
Fundamentals of Robotics Study of a Robot - Chapter 2 and 3 Sergi Valverde u1068016@correu.udg.edu Daniel Martínez u1068321@correu.udg.edu June 9, 2011 1 Introduction This report introduces the second
Parallel and perspective projections such as used in representing 3d images.
 Chapter 5 Rotations and projections In this chapter we discuss Rotations Parallel and perspective projections such as used in representing 3d images. Using coordinates and matrices, parallel projections
Chapter 5 Rotations and projections In this chapter we discuss Rotations Parallel and perspective projections such as used in representing 3d images. Using coordinates and matrices, parallel projections
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS
 KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
DEPARTMENT - Mathematics. Coding: N Number. A Algebra. G&M Geometry and Measure. S Statistics. P - Probability. R&P Ratio and Proportion
 DEPARTMENT - Mathematics Coding: N Number A Algebra G&M Geometry and Measure S Statistics P - Probability R&P Ratio and Proportion YEAR 7 YEAR 8 N1 Integers A 1 Simplifying G&M1 2D Shapes N2 Decimals S1
DEPARTMENT - Mathematics Coding: N Number A Algebra G&M Geometry and Measure S Statistics P - Probability R&P Ratio and Proportion YEAR 7 YEAR 8 N1 Integers A 1 Simplifying G&M1 2D Shapes N2 Decimals S1
Rigging / Skinning. based on Taku Komura, Jehee Lee and Charles B.Own's slides
 Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
Rigging / Skinning based on Taku Komura, Jehee Lee and Charles B.Own's slides Skeletal Animation Victoria 2 CSE 872 Dr. Charles B. Owen Advanced Computer Graphics Skinning http://www.youtube.com/watch?
ROBOTICS 01PEEQW Laboratory Project #1. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated 2 Lab Simulation Project #1: Pan-Tilt (PT) structure (2dof) This system is composed by two
ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated 2 Lab Simulation Project #1: Pan-Tilt (PT) structure (2dof) This system is composed by two
7. The Gauss-Bonnet theorem
 7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
7. The Gauss-Bonnet theorem 7.1 Hyperbolic polygons In Euclidean geometry, an n-sided polygon is a subset of the Euclidean plane bounded by n straight lines. Thus the edges of a Euclidean polygon are formed
Chislehurst and Sidcup Grammar School Mathematics Department Year 9 Programme of Study
 Chislehurst and Sidcup Grammar School Mathematics Department Year 9 Programme of Study Timings Topics Autumn Term - 1 st half (7 weeks - 21 lessons) 1. Algebra 1: Expressions, Formulae, Equations and Inequalities
Chislehurst and Sidcup Grammar School Mathematics Department Year 9 Programme of Study Timings Topics Autumn Term - 1 st half (7 weeks - 21 lessons) 1. Algebra 1: Expressions, Formulae, Equations and Inequalities
To do this the end effector of the robot must be correctly positioned relative to the work piece.
 Spatial Descriptions and Transformations typical robotic task is to grasp a work piece supplied by a conveyer belt or similar mechanism in an automated manufacturing environment, transfer it to a new position
Spatial Descriptions and Transformations typical robotic task is to grasp a work piece supplied by a conveyer belt or similar mechanism in an automated manufacturing environment, transfer it to a new position
The Uncertainty of Parallel Model Coordinate Measuring Machine
 MAPAN - Journal of The Metrology Society of of Parallel India, Vol. Model 26, Coordinate No. 1, 2011; Measuring pp. 47-53 Machine ORIGINAL ARTICLE The of Parallel Model Coordinate Measuring Machine KOSUKE
MAPAN - Journal of The Metrology Society of of Parallel India, Vol. Model 26, Coordinate No. 1, 2011; Measuring pp. 47-53 Machine ORIGINAL ARTICLE The of Parallel Model Coordinate Measuring Machine KOSUKE
ROBOTICS 01PEEQW Laboratory Project #1. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated This structure simulates a pan-tilt camera, pointing down to a plane. It is also possible to
ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated This structure simulates a pan-tilt camera, pointing down to a plane. It is also possible to
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
FORCE CONTROL OF LINK SYSTEMS USING THE PARALLEL SOLUTION SCHEME
 FORCE CONTROL OF LIN SYSTEMS USING THE PARALLEL SOLUTION SCHEME Daigoro Isobe Graduate School of Systems and Information Engineering, University of Tsukuba 1-1-1 Tennodai Tsukuba-shi, Ibaraki 35-8573,
FORCE CONTROL OF LIN SYSTEMS USING THE PARALLEL SOLUTION SCHEME Daigoro Isobe Graduate School of Systems and Information Engineering, University of Tsukuba 1-1-1 Tennodai Tsukuba-shi, Ibaraki 35-8573,
[2] J. "Kinematics," in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.
![[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.](/thumbs/90/102406247.jpg "[2] J. Kinematics, in The International Encyclopedia of Robotics, R. Dorf and S. Nof, Editors, John C. Wiley and Sons, New York, 1988.") 92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
92 Chapter 3 Manipulator kinematics The major expense in calculating kinematics is often the calculation of the transcendental functions (sine and cosine). When these functions are available as part of
Math Section 4.2 Radians, Arc Length, and Area of a Sector
 Math 1330 - Section 4.2 Radians, Arc Length, and Area of a Sector The word trigonometry comes from two Greek roots, trigonon, meaning having three sides, and meter, meaning measure. We have already defined
Math 1330 - Section 4.2 Radians, Arc Length, and Area of a Sector The word trigonometry comes from two Greek roots, trigonon, meaning having three sides, and meter, meaning measure. We have already defined