Fingerprint Mosaicking &
|
|
|
- Martin Butler
- 5 years ago
- Views:
Transcription
1 72 1. New matching methods for comparing the ridge feature maps of two images. 2. Development of fusion architectures to improve performance of the hybrid matcher. 3. Constructing the ridge feature maps using adaptive methods for optimal selection of the Gabor filters. Chapter 4 Fingerprint Mosaicking &
2 73 Fingerprint Verification using SIKP Chapter 4 Fingerprint Mosaicking & Fingerprint Verification using SIKP A fingerprint-based verification system has two distinct phases of operation: (i) the enrollment phase, during which multiple impressions of a fingerprint are acquired and stored in the database as templates, and (ii) the authentication phase, where the query image of a user is matched

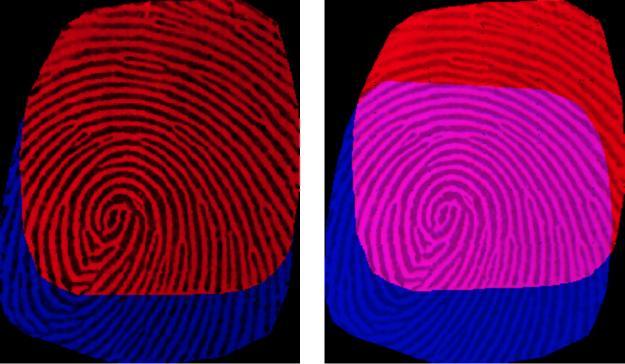
3 74 against the stored templates pertaining to that user (Figure 4.1). The solid-state sensors that are being increasingly deployed in commercial applications, however, sense only a limited portion of the fingerprint pattern present in the tip of the finger. The amount of information (e.g., number of minutiae points) that can be extracted from such partial prints is substantially lower compared to that which can be extracted from more elaborate prints sensed using an optical sensor or even inked prints. As observed in Chapter 3, the average number of minutiae points extracted from a Digital Biometrics optical sensor ( image at 500 dpi) is 45 compared to 25 minutiae obtained from a Veridicom sensor image ( image at 500 dpi). This loss of information affects the matching performance of the verification system - the relatively small overlap between the template and query impressions results in fewer corresponding points and therefore, results in higher false rejects and/or higher false accepts (Figure 4.2).

4 75 Figure 4.1: Fingerprint verification: Multiple impressions of the same finger are stored in the database as templates. The query image is matched against the components of the template to verify the claimed identity. To deal with this problem, we have developed a fingerprint mosaicking scheme that constructs a composite fingerprint template using evidence accumulated from multiple impressions. A composite template reduces storage, decreases matching time and alleviates the quandary of selecting the optimal fingerprint template from a given set of impressions. In the proposed algorithm, two impressions (templates) of a finger are initially aligned using the corresponding minutiae points. This alignment is used by a modified version of the well-known iterative closest point algorithm (ICP) to compute a transformation matrix that defines the spatial relationship between the two impressions. The resulting transformation matrix is used in two ways: (a) the two template images are stitched together to generate a composite image. Minutiae Image (b) Query Image (a) Template Figure 4.2: Two impressions ( ) of the same finger acquired using
5 76 the Veridi-com sensor. The two impressions are observed to have very little overlap. points are then detected in this composite image; (b) the minutia sets obtained from each of the individual impressions are integrated to create a composite minutia set. Our experiments show that a composite template improves the performance of the fingerprint matching system by 4%. 4.1 Introduction Typically, two types of representations are used to assess the similarity between a pair of fingerprints: (a) the global representation that examines the structure and flow of ridges over the entire print, and (b) the local representation, that exploits the position and orientation of certain singular points, called minutiae, that are present in the print (e.g., ridge endings and ridge bifurcations). By building a composite image, the amount of information available for these two types of representation increases. For example, the number of minutiae points used to represent a fingerprint may increase when minutiae information from two impressions of a finger are integrated. Similarly, the amount of ridge information available for global representation may increase as well. The challenge lies in accurately registering multiple impressions of the finger in order to extract more information. An accurate registration would aid in efficient mosaicking of
 The ridges in a fingerprint image may have nonlinear distortions due to the effect of pressing a")
6 77 the impressions. Registering fingerprint images, however, is a difficult problem for the following two reasons: (a) The ridges in a fingerprint image may have nonlinear distortions due to the effect of pressing a convex elastic surface (the finger) on a flat surface (the sensor). Moreover, these distortions may be present only in certain regions of the sensed image due to the non-uniform pressure applied by the subject. (b) The presence of dirt deposits on the sensor or the finger can result in noisy or occluded images. It is rather difficult to register pairs of fingerprint images that are distorted differently or affected by noise. Ratha et al. [30] have developed a mosaicking scheme to integrate multiple snapshots of a fingerprint. The multiple snapshots are acquired as the user rolls the finger on the surface of the sensor and, therefore, a specific temporal order is imposed on the image frames when constructing the composite image. The authors examine 5 composition schemes that stack the grayscale images together and construct a composite mosaicked image, by associating a confidence value with every pixel. They evaluate the efficacy of these schemes by observing the area and quality (in terms of the number of valid minutiae points detected) of the composite image.
7 78 Their experiments indicate that the mosaicked image has a substantially larger area and, consequently, more number of minutiae points are detected. It has to be noted that in their technique, successive impressions will have spatial proximity. But, in the case of dab fingerprint impressions obtained at different time instances, the parametric (e) (f) (g) (h) Figure 4.3: Rolled versus dab prints. (a) - (d): A sequence of 4 rolled fingerprint impressions obtained using the Digital Biometric sensor. Successive image frames are known to have spatial proximity. (e) - (h): Four impressions of a finger obtained at different time instances using a Veridicom sensor. The transformation between the impressions is not known. transformation between impressions is not known. This complicates the problem of mosaicking fingerprint images captured at different time instances. We approach the problem of fingerprint mosaicking by treating the acquired fingerprint images as 3D surfaces. The rationale behind this is the observation that the imaging process involves pressing the 3D surface of the fingertip on a 2D flat surface. We assume that the resulting 2D intensity image indicates the pressure with which a user holds the finger against the surface of the sensor. Therefore, the intensity images may be treated as 3D range (surface) images. In order to generate the transformation matrix defining the spatial relationship between two impressions, we employ the iterative closest point (ICP) algorithm that registers two 3D surface images when sufficient number of corresponding points are available between the two surfaces. The
8 79 correspondences are used to compute an initial approximate alignment between the two surfaces; the ICP algorithm then attempts to find an optimal alignment such that the sum of distances between control points in one surface and the corresponding tangential planes in the other is minimized. Details of the algorithm is provided in the following section. 4.2 Fingerprint Image Registration The problem of registering multiple 3D surfaces has received much attention in the literature [31][32]. A typical application of registration is 3D object model construction where multiple views of an object are integrated [33]. However, a variety of other applications exist for surface registration [34], including medical image analysis [35], terrain matching [36], etc. A 3D surface registration algorithm seeks to find the best transformation T that relates two entities P and Q whose range images are given by R P and R Q, respectively. Thus the goal of a registration algorithm is to find T such that the following objective function, D(R P,R Q ), is minimized:


9 80 where The transformation,, that is used to optimally align entities P and Q, usually depends upon the distortions present in the range images. Thus, may be rigid, affine, polynomial, or elastic. For our application we assume to be a rigid transformation. can, therefore, be expressed as follows in homogeneous coordinates: Here, β and are the rotation angles about the x, y and z axes, respectively, and, and are the translation components along the three axes. Thus the matrix In reality, the function has 6 independent parameters. is not known and, therefore, the objective function in equation (4.1) has to be replaced by an evaluation function that assumes knowledge of a set of corresponding points in and. Therefore, given a set of N pairs of corresponding points, and i = 1... N, one can try to minimize the evaluation function e(r P,R Q ):
10 81 If the correspondences are not known, then it is not possible to register the images. Corresponding points are typically selected by extracting higher level features (e.g., edges, corners, texture, points of locally maximum curvature, etc.) from the two surfaces, and looking for similarities between the two sets of extracted features. If the corresponding points are known, then the evaluation function shown in Equation (4.3) can be minimized by simply searching for the global minimum in the 6-dimensional parametric space using an iterative procedure. Such a procedure, however, does not guarantee convergence to a global minimum. To circumvent this problem, Chen and Medioni [37] assume that an initial approximate transformation,, is known. A good starting approximation assures that the global minimum is reached quickly and surely. Equation (4.3) imposes a strict correspondence between points p i and q i. If the pair of points selected are incompatible (i.e., they are located on different surfaces in the two images), then an iterative procedure may converge very slowly. In order to deal with this issue, the ICP algorithm is used. This algorithm tries to minimize the distances between points in one image to geometric entities (as opposed to points) in the other. Chen and Medioni [37] attempt to minimize the distance of a point on one surface, to the tangential plane of the corresponding point in the other
11 82 surface. Thus, they minimize where, is the distance from the point to the plane, and is the tangential plane corresponding to in surface. Once an initial alignment is provided, the control points are automatically chosen by examining homogeneous regions in the two images. An iterative procedure is adopted to converge to the global minimum (and hence the superscript k in the above equation). Since an approximate initial transformation matrix is known, convergence to the global minimum is assured, and since there is a relaxation in the condition of strict correspondence between points (equation (4.4)), convergence is faster. 4.3 Fingerprint Mosaicking We pose the fingerprint mosaicking problem as a 3D surface registration problem that can be solved using a modified ICP algorithm. The initial alignment of fingerprint images I P and I Q is obtained by extracting minutiae points from each individual image, and then comparing the two sets of minutiae points using an elastic point matching algorithm [38]. The comparison proceeds by first selecting a reference minutiae pair (one

 be the other corresponding minutiae pairs.")

![The initial transformation,, is computed using Horn s method of unit quaternions [39] that operates on the ( x, y, z )](/docs-images/91/104524876/images/12-3.jpg "values. In this technique, the translation parameters in Equation (4.")


12 83 from each image), and then determining the number of corresponding minutiae pairs using the remaining sets of points in both the images. The reference pair that results in the maximum number of corresponding pairs is chosen. Let (p Q,q Q ) be the reference minutiae pair and let (p l, q i ),... (p N, q N ) be the other corresponding minutiae pairs. Here, and, where (x,y) are the spatial coordinates of the minutiae points, z is the intensity of the image at (x,y) and θ is the minutiae orientation. The initial transformation,, is computed using Horn s method of unit quaternions [39] that operates on the ( x, y, z ) values. In this technique, the translation parameters in Equation (4.2) are computed using the centroid of the point sets and, and the rotation components are computed using the cross-covariance matrix between the centroid-adjusted pairs of points Preprocessing the Fingerprint Image Since the ICP algorithm uses distances from points to planes, it is very sensitive to rapid and abrupt changes in surface direction. Therefore, the fingerprint images are first median filtered using a 3 3 mask. This operation removes any undesirable salt-and-pepper noise that may be present in the valleys (furrows) of the fingerprint image (which may contribute to abrupt changes in the range image). The intensity values of the median filtered image are then scaled to a narrow range of values ([10, 20]) to ensure a fairly
13 84 smooth change in surface direction in the corresponding range image of the fingerprints (Figure 4.4(b)) Fingerprint Segmentation The purpose of segmentation is to separate the foreground and background regions in the given intensity image. The foreground corresponds to those regions in the image that have valid fingerprint information (i.e., the ridges and valleys of the fingerprint), while the background represents those regions that do not have this information. It is useful to mask out the background of the images before registering the images using the ICP algorithm. This prevents the ICP algorithm from choosing control points in the background region (which is possible due to the homogeneity in intensity in these regions) and then attempting to align the images using these points. The algorithm to segment an image is as follows: (a) The preprocessed grayscale fingerprint image is converted to a binary image by examining the histogram of intensities and choosing a threshold. (b) An edge detection algorithm is applied to the binary image to get the outline of
![85 ridges. (c) Graham s convex hull algorithm [25] is used to generate a polygon that segments the fingerprint image (Figure 4.4(c)). 4.3.](/docs-images/91/104524876/images/14-1.jpg "3 Fingerprint as a Range Image The intensity values are directly used as range values.")
14 85 ridges. (c) Graham s convex hull algorithm [25] is used to generate a polygon that segments the fingerprint image (Figure 4.4(c)) Fingerprint as a Range Image The intensity values are directly used as range values. Therefore, the intensity value of the image at the planar coordinate (x,y) is treated as the range value at that location. We now have two range images R P and R Q, that are obtained from the corresponding intensity images I P and I Q, respectively. Figure 4.4(d) illustrates this mapping for a portion of the image in 4.4(c) Registering Fingerprint Images The two range images, R P and R Q, are now subject to the iterations of the ICP algorithm. At each iteration k, the transformation T k that minimizes E k in Equation (4.4) is chosen. The process is said to have converged when, where є is some threshold, є 0. The final transformation matrix, T solution, is used in the following two ways. 1. It is used to integrate the two individual images and create a


15 86 composite image whose spatial extent is generally larger than the individual images. Minutiae points are then extracted from this larger image. 2. The minutiae sets from the individual images are augmented using.
16 87 Figure 4.4: Mapping an intensity image to a range image. (a) The original intensity image. (b) The intensity image after median filtering and scaling. (c) The segmented intensity image. (d) The range image corresponding to the boxed region (rotated by 90 o ) in (c).

![Since transforms into, we compute the new spatial coordinates of every pixel in. We extract a new minutiae set ( ) from this image using the algorithm described in [38] (see figure 4.5(e)).](/docs-images/91/104524876/images/17-2.jpg "Note that the spatial extent of the composite image is generally larger than the individual images. Figure 4.6 shows the result of mosaicking on six different fingerprint pairs. Table 4.")
17 Input Image Mosaicked Image 88 Average Size Average Number of Minutiae Table 4.1: Increase in average image size and average number of detected minutiae as a result of mosaicking. Mosaicked Images The given intensity images I P and I Q are integrated into a new image I R. Since transforms into, we compute the new spatial coordinates of every pixel in. We extract a new minutiae set ( ) from this image using the algorithm described in [38] (see figure 4.5(e)). Note that the spatial extent of the composite image is generally larger than the individual images. Figure 4.6 shows the result of mosaicking on six different fingerprint pairs. Table 4.1 lists the increase in image size and the number of detected minutiae in the composite image. The mosaicking procedure may sometimes result in poorly aligned images. This can happen when: (i) the segmentation of either of the images is erroneous, (ii) the images are noisy, or (iii) there are very few (< 5) corresponding points available to provide a valid initial alignment (Figure 4.7).
 (c)")
18 89 (a) (b) (c) (d)
 Initial alignment. (d) Final alignment. (e) Minutiae extracted from mosaicked images.")
19 90 (e) (f) Figure 4.5: Composite template construction: (a) First image after segmentation. (b) Second image after segmentation. (c) Initial alignment. (d) Final alignment. (e) Minutiae extracted from mosaicked images. (f) Composite minutiae set obtained by augmenting individual minutiae sets.
 (c)")

20 91 (a) (b) (c)

21 92 (d) (e) (f) Figure 4.6: The result of mosaicking six pairs of fingerprint impressions. The spatial extent of the mosaicked image is observed to be larger than that of the component images.

![We extract a new minutiae set ( from this composite image using the algorithm described in [38] (see figure 4.5).](/docs-images/91/104524876/images/22-2.jpg "Augmented Minutiae Sets Let refer to the minutiae set extracted from and refer to the minutiae set extracted from I Q.")
22 93 (a) (b) Figure 4.7: Examples of poorly mosaicked image pairs. Integrating Images The intensity images I P and I Q are integrated into a new image I R. Since T solution transforms I P into I Q, we compute the new spatial coordinate of every pixel I P in I R. We extract a new minutiae set ( from this composite image using the algorithm described in [38] (see figure 4.5). Augmented Minutiae Sets Let refer to the minutiae set extracted from and refer to the minutiae set extracted from I Q. The composed minutiae set is obtained by computing the (x, y, θ) parameter of each minutia in the composite image. The new (x, y) coordinates (i.e., the spatial coordinates) of the minutiae points (of the first image) is determined by simply multiplying the old coordinates with the transformation matrix (Figure 4.5f). The minutiae orientation, θ, is not recomputed.
, and M R2 (obtained by integrating individual minutiae sets).")
23 Experimental Results We have conducted the following experiments to validate the effectiveness of the transformation and integration described in section We have two different techniques to obtain a composite minutiae set. The two minutiae sets are indicated by M R1 (obtained by extracting minutiae from the composite image), and M R2 (obtained by integrating individual minutiae sets). We treat these sets as template minutiae sets against which a query minutiae set can be matched. Fingerprint images of 640 different fingers, corresponding to 160 different subjects, were acquired using the Veridicom sensor as described in the previous chapter. 4 different impressions of each of these fingers were obtained over two different sessions separated by a period of six weeks (2 impressions in each session). The two impressions acquired at the same session were used to construct the template minutiae set of a finger, while the other two impressions were used as query images during the test phase of the experiment. Thus, 640 pairs of images were used to construct the minutiae templates and, and the rest (1280) were used as query images. Given a minutiae set M U (of the query image I U ), and the template minutiae sets M P, M Q, and, we perform the following comparisons: (i) M U with M P, (ii)m U with M Q, (iii) M U with, and (iv) M U with. Thus we get a set of four scores corresponding to these comparisons. The ROC curves depicting the performance of these 4 different matchings are shown
24 95 in figure 4.8. It is clear from these graphs that a composite template image results in improved matching performance. We further observe that a better matching performance is obtained by using rather than. This may be due to incorrect minutiae orientation in M R2. Note that when augmenting the two minutiae sets, M P and M Q, no systematic technique is used to adjust the minutiae orientation in the composite minutiae template,. While the use of results in better matching performance, generating M R1 introduces several spurious minutiae that have to be carefully discarded. The spurious minutiae are a consequence of misalignment of the ridges present in the two individual impressions that are being integrated. Figure 4.8: The ROC curves indicating improvement in matching performance after mosaicking templates. Utilizing the minutiae points that are extracted from the composite fingerprint image (M R1 ) results in the best matching performance.
25 Fingerprint Verification Using Scale Invariant Key Points Introduction Fingerprint based verification systems have gained immense popularity due to the high level of uniqueness attributed to fingerprints and the availability of compact fingerprint sensors that can be easily embedded into a wide variety of devices requiring user authentication. Fingerprints are being extensively used for person identification in a number of commercial, civil, and forensic applications. Most of the current fingerprint verification systems utilize features that are based on minutiae points and ridge patterns. While minutiae based fingerprint verification systems have shown fairly high accuracies, further improvements in their performance are needed for acceptable performance, especially in applications involving very large scale databases. In an effort to extend the existing technology for fingerprint verification, we propose a new representation and matching scheme for fingerprint using Scale invariant key points. We extract characteristic of Scale invariant key points in scale space and perform matching based on the texture information around the feature points using the Scale invariant key points operator. A systematic strategy of applying Scale invariant key points to fingerprint images is proposed. We have used a public domain fingerprint database (FVC 2002)[40]. We demonstrate that this approach complements the minutiae based fingerprint representation. Further, the combination of Scale invariant key points and conventional minutiae based system achieves significantly better performance than either of the individual schemes.
26 97 Biometric recognition refers to automatic authentication of a person based on his/her physiological or behavioral characteristics. Biometric recognition offers many advantages over traditional PIN number or password and token-based (e.g., ID cards) approaches; for example, a biometric trait cannot be easily transferred, forgotten or lost, the rightful owner of the biometric template can be easily identified, and it is difficult to duplicate a biometric trait. Some well known examples of traits used in biometric recognition are fingerprint, iris, face, signature, voice, hand geometry, retina, DNA, gait, keystroke dynamics and ear structure shown in figure 4.9. A number of commercial recognition systems based on these traits have been deployed and are currently in use. Biometric technology has now become a viable and more reliable alternative to traditional authentication systems. With increasing applications involving human-computer interactions, there is a growing need for fast authentication techniques that are reliable and secure. Biometric recognition is well positioned to meet the increasing demand for secure and robust systems. There are several requirements that need to be met by a particular biometric trait when being considered for use in an authentication system. These requirements are: (i) universality, which means that each individual should possess the trait, (ii) distinctiveness, which means that the trait for two different persons should be sufficiently different to distinguish between them, (iii) permanence, which means that the trait characteristics should not change, or change minimally, over time, and (iv) collectability, which means that the trait can be measured quantitatively.
 whether the biometric trait will be widely accepted by the public for use in their daily")
27 98 However, for practical biometric systems, there are other considerations that are important, namely, (i) whether the performance and authentication rates of the system are at acceptable levels, measured in terms of speed, recognition accuracy and robustness, in different operational environments, (ii) whether the biometric trait will be widely accepted by the public for use in their daily lives, and (iii) whether the system based on the trait can be easily attacked or spoofed. The main requirements of a practical biometric system are that it should have acceptable recognition performance rates, recognition speed and cost. In addition, it should protect the user from privacy intrusions and be robust with respect to various spoofing attacks. Among all the biometric traits used for authentication, fingerprint-based recognition has the longest history (almost 100 years) and has been successfully adopted not only in forensic applications, but in an increasing number of civilian applications.
28 99 Figure 4.9: Some examples of biometric traits: (a) Fingerprint; (b) Handgeometry; (c) Iris; (d) Retina; (e) Face; (f) Palm print; (g) Ear structure; (h) DNA; (i) Voice; (j) Gait; (k) Signature and (l) Keystroke dynamics. It is well known that no two individuals have the same fingerprints. Automatic Fingerprint Identification Systems (AFIS) that are being used by law enforcement agencies world wide for over 40 years [41][42]. The most popular method for fingerprint representation is based on local landmarks called minutiae. This scheme evolved from an intuitive system design tailored for forensic experts who visually match the fingerprints. The minutiae-based systems first locate the points, often referred to as minutiae points, in fingerprint image where the fingerprint ridges either terminate or bifurcate and then match minutiae relative placement in a given finger and the stored template. A good quality fingerprint contains between 25 and 80 minutiae depending on sensor resolution and finger placement on the sensor. It is well known that it is difficult to automatically and reliably extract minutiae based representations from poor quality fingerprint impressions arising from very dry fingers or from fingers mutilated by scars, scratches due to accidents, injuries, or profession-related (e.g., electrician, mason, musician) work. Also, there is anecdotal evidence that a fraction of the population may have fingers that have relatively small number of minutiae thereby making fingerprint-based identification more vulnerable to failures for the corresponding individuals. There are three typical categories of fingerprint verification methods: i) minutiae, ii) correlation, and iii) ridge features. However, considering the
29 100 types of information used, a method can be broadly categorized as minutiae based or texture based. While the minutiae based fingerprint verification systems have shown high accuracy [13][15][43], they ignore the rich information in ridge patterns which can be useful to improve the matching accuracy. Most of the texture based matchers use the entire fingerprint image or local texture around minutiae points [18][44]. Using local texture is more desirable because the global texture will be more sensitive to non-linear and non-repeatable deformation of fingerprint images. When the local texture is collected based on the minutiae points, the texture based fingerprint representation is again limited and its performance depends upon the reliability of extracted minutiae points. It is not obvious how one could capture the rich discriminatory texture information in the fingerprints that is not critically dependent on finding minutiae points [44] or core points [21]. For the purpose of extending characteristic feature points of fingerprint beyond minutiae points, we adopt Scale invariant key points (SIKP)[45]. SIKP extracts repeatable characteristic feature points from an image and generates descriptors representing the texture around the feature points. In our work, we demonstrate the utility of Scale invariant key points for fingerprint-based identification. Since the SIKP feature points have already demonstrated their efficacy in other generic object recognition problems, it is expected that this representation is also stable and reliable for many of the matching problems related to the fingerprint domain. Further, since these feature points are based on texture analysis of the entire scale space, it is hoped that these feature points will be robust to the fingerprint quality and deformation variation.
30 SCALE INVARIANT KEY POINTS (SIKP) SIKP[45] was originally developed for general purpose object recognition. This detects stable feature points in an image and performs matching based on the descriptor representing each feature point. A brief description of this operator is provided below. A scale space is constructed by applying a variable scale Gaussian operator on an input image. Difference of Gaussian (DOG) images are obtained by subtracting subsequent scales in each octave. The set of Gaussian-smoothed images and DOG images are called an octave. Local extrema are detected by observing each image point in DOG space. A point is decided as a local minimum or maximum when its value is smaller or larger than all its surrounding neighboring points by a certain amount. A local extrema is observed if its derivative in scale space is stable and if it is on an apparent edge. More detailed description of this process can be found in the original paper by Lowe [45]. If an extrema is decided as unstable or is placed on an edge, it is removed because it can not be reliably detected again with small variation of viewpoint or lighting changes. A 16x16 window is used to generate a histogram of gradient orientation around each local extremum. To make the descriptor orientation invariant, all gradient orientations are rotated with respect to the major orientation of the local extremum. Matching is performed by comparing each local extrema based on the associated descriptors. Suppose we want to match two images I 1 and I 2. Given a feature point p 11 in I 1, its closest point p 21, second closest point
31 102 p 22, and their distances d 1 and d 2 are calculated from feature points in I 2. When the ratio d 1 /d 2 is sufficiently small, p 11 is considered to match with p 21. The matching score between two images can be decided based on the number of matching points and their geometric configuration SCALE INVARIANT KEY POINTS ON FINGERPRINT IMAGES Characteristic feature points in fingerprints Minutiae points are strictly defined by the ridge ending and bifurcation points. Therefore, the number of minutiae points appearing in a fingerprint image is limited to a small number (<100). However, SIKP points are only limited by the condition of local minima or maxima in a given scale space, resulting in a large number of feature points. The number of SIKP characteristic feature points are affected by a set of parameters such as the number of octaves and scales. Typical fingerprints may contain up to a few thousand SIKP characteristic feature points. Figure 4.10 shows an example of minutiae points and SIKP characteristic feature points on the same fingerprint image. There are only 36 minutiae points, but the number of Scale Invariant Key Points are observed to be 2,020. The SIKP parameter values we used are the number of octaves = 4, number of scales = 5, width of Gaussian kernel = 3, and the initial value of the standard deviation of the Gaussian kernel = Fingerprint verification using SIKP Preprocessing Even though SIKP was originally developed for general purpose object recognition and does not require image pre processing, we have
 adjusting the gray level distribution and (ii) removing noisy SIKP feature points.")
32 103 performed a few preprocessing steps on fingerprint images to obtain better matching performance. The preprocessing is performed in two steps: i) adjusting the gray level distribution and (ii) removing noisy SIKP feature points. When the fingerprint images show similar texture, the performance is expected to be improved because SIKP utilizes texture information both for extracting feature points and matching. For the same reason, noisy SIKP feature points are removed to obtain better matching performance. First, to overcome some apparent differences in gray level distributions, we measure the image intensity in the central area of fingerprint and adjust the histogram. Second, the boundary area of a fingerprint always causes some feature points to be detected because they are local extrema. (a) 36 minutiae points (b) 2020 Scale invariant key points Figure Minutiae and SIKP extracted from the same image However, the boundary region is different for every fingerprint impression even for the same finger. Therefore, feature points on the fingerprint boundary usually result in false matches. We construct a binary mask that includes only the inner part of a fingerprint and use it to prevent
.")

 Input pair of fingerprints (b) Preprocessing (c)local")
33 104 any noisy feature points from being detected on the boundary. Example binary masks are shown in Figure 4.12 (b). Preprocessing Local Extrema & Descriptor Extraction Point wise Matching Trimming false matches Figure Flow chart of fingerprint matching using SIKP operator. (a) Input pair of fingerprints (b) Preprocessing (c)local Extraction Extrema & Descriptor (d) Point wise matching
34 105 (e) Trimming false matches Figure Description of fingerprint matching process using SIKP operator Point wise Matching The first step in matching is to directly compare each feature point based on the descriptor using Euclidean distance metric. The point wise matching is performed by comparing each local extrema based on the associated descriptors. Suppose we want to match two images I 1 and I 2. Given a feature point p 11 in I 1, its closest point p 21, second closest point p 22, and their distances d 1 and d 2 are calculated from feature points in I 2. When the ratio d 1 /d 2 is sufficiently small, p 11 is considered to match with p 21. The matching score between two images can be decided based on the number of matching points and their geometric configuration Trimming False Matches The point wise matching generates some erroneous matching points which increase the false accept rate. Therefore, it is necessary to remove spurious matching points using geometric constraints. The typical geometric variations appearing in fingerprint images are limited to small rotations and translations. Therefore, when we place two fingerprint images side by side and draw matching lines as shown in Figure 4.12 (d), all true matches appear as parallel lines with similar lengths. Based on
 and (e). 4.7")
35 106 this observation, we select a value of majority orientation and length and keep the matching pairs that have the majority orientation and length. This reduces the number of matching points as shown in Figures 4.12 (d) and (e). 4.7 EXPERIMENTAL RESULTS Database The performance of the proposed Scale invariant key points based fingerprint verification has been evaluated on FVC2002 DB1 and DB2 public domain fingerprint databases [40]. Both the databases contain images of 100 different fingers with 8 impressions for each finger. More detailed characteristics of these two databases are summarized in Table 4.2. The set of parameters described in section 4.6 are used for both the databases. Table Description of FVC 2002 DB1 and DB2 databases Database Sensor Type Image Size Number of images Resolution DB1 Optical Sensor 388x374 (142K pixels) 100x8 500 dpi DB2 Optical Sensor 296x560 (162K pixels) 100x8 569 dpi
36 107 (a) DB 1 (b) DB 2 Figure Performance of minutiae and SIKP matchers and their fusion result Fingerprint matching We have performed all pair genuine matchings and a subset of all possible imposter matchings following the guideline of FVC 2002 a public domain fingerprint database. As a result, the number of genuine matchings is 2,800 and the number of imposter matchings is 4,950. Figure 4.13 shows the performance of SIKP matching using DET curve. By trimming out false matches using geometric constraints, the EER of SIKP matcher is almost reduced by about 50% for both the databases. Figure 4.13 shows the performance of minutiae and the fusion using weighted sum-rule with min-max normalization. The weights are empirically chosen as 0.92 for SIKP and 0.08 for minutiae for both databases. The fusion of matchers resulted in better performance than either of the two matchers. Table 4.3 summarizes the equal error rates (EER) computed from Figure Table Equal Error Rates of SIKP, Minutiae, and Fusion matchers Database SIKP Minutiae SIKP + Minutiae DB % 1.79 % 0.99 % DB % 2.13 % 1.07 % 4.8 Summary We have described a fingerprint template construction technique that integrates information available in two different impressions of the same finger. The method makes use of corresponding minutiae points to
37 108 establish an initial approximate alignment, and a modified ICP algorithm to register the two impressions. The transformation matrix generated by the ICP algorithm is used to construct composite information from the individual impressions. Our experiments indicate that mosaicking the images together and then extracting the (template) minutiae set results in a better matching performance. The mosaicking scheme suggested here has been used to register two impressions of a finger. By repeated application of this procedure several impressions of a finger (> 2) may be integrated. Fingerprint mosaicking elegantly addresses the problem of partial fingerprint images and is, therefore, an essential component of a fingerprint recognition system. We have shown that the SIKP operator can be used for fingerprint feature extraction and matching. We have performed fingerprint matching in two steps: i) point-wise match and ii) trimming false matches with geometric constraints. The fusion with a minutiae based matcher shows significant performance improvement on two public domain databases. We believe the performance improvement due to fusion is possible because the sources of information used in minutiae and SIKP based matchers are significantly different. SIKP shows a good possibility of extending minutiae based or minutiae related fingerprint representations. It is possible to further improve the performance of SIKP if proper preprocessing is performed on the input image that can reduce
38 109 the noise in the images. The typical preprocessing in minutiae based technique involves connecting broken ridges and extracting skeletons of the ridge pattern, which removes all the texture information that is used in the SIKP operator.
Development of an Automated Fingerprint Verification System
 Development of an Automated Development of an Automated Fingerprint Verification System Fingerprint Verification System Martin Saveski 18 May 2010 Introduction Biometrics the use of distinctive anatomical
Development of an Automated Development of an Automated Fingerprint Verification System Fingerprint Verification System Martin Saveski 18 May 2010 Introduction Biometrics the use of distinctive anatomical
FILTERBANK-BASED FINGERPRINT MATCHING. Dinesh Kapoor(2005EET2920) Sachin Gajjar(2005EET3194) Himanshu Bhatnagar(2005EET3239)
 Sachin Gajjar(2005EET3194) Himanshu Bhatnagar(2005EET3239)") FILTERBANK-BASED FINGERPRINT MATCHING Dinesh Kapoor(2005EET2920) Sachin Gajjar(2005EET3194) Himanshu Bhatnagar(2005EET3239) Papers Selected FINGERPRINT MATCHING USING MINUTIAE AND TEXTURE FEATURES By Anil
FILTERBANK-BASED FINGERPRINT MATCHING Dinesh Kapoor(2005EET2920) Sachin Gajjar(2005EET3194) Himanshu Bhatnagar(2005EET3239) Papers Selected FINGERPRINT MATCHING USING MINUTIAE AND TEXTURE FEATURES By Anil
Local Correlation-based Fingerprint Matching
 Local Correlation-based Fingerprint Matching Karthik Nandakumar Department of Computer Science and Engineering Michigan State University, MI 48824, U.S.A. nandakum@cse.msu.edu Anil K. Jain Department of
Local Correlation-based Fingerprint Matching Karthik Nandakumar Department of Computer Science and Engineering Michigan State University, MI 48824, U.S.A. nandakum@cse.msu.edu Anil K. Jain Department of
Abstract -Fingerprints are the most widely. Keywords:fingerprint; ridge pattern; biometric;
 Analysis Of Finger Print Detection Techniques Prof. Trupti K. Wable *1(Assistant professor of Department of Electronics & Telecommunication, SVIT Nasik, India) trupti.wable@pravara.in*1 Abstract -Fingerprints
Analysis Of Finger Print Detection Techniques Prof. Trupti K. Wable *1(Assistant professor of Department of Electronics & Telecommunication, SVIT Nasik, India) trupti.wable@pravara.in*1 Abstract -Fingerprints
Fingerprint Matching using Gabor Filters
 Fingerprint Matching using Gabor Filters Muhammad Umer Munir and Dr. Muhammad Younas Javed College of Electrical and Mechanical Engineering, National University of Sciences and Technology Rawalpindi, Pakistan.
Fingerprint Matching using Gabor Filters Muhammad Umer Munir and Dr. Muhammad Younas Javed College of Electrical and Mechanical Engineering, National University of Sciences and Technology Rawalpindi, Pakistan.
Logical Templates for Feature Extraction in Fingerprint Images
 Logical Templates for Feature Extraction in Fingerprint Images Bir Bhanu, Michael Boshra and Xuejun Tan Center for Research in Intelligent Systems University of Califomia, Riverside, CA 9252 1, USA Email:
Logical Templates for Feature Extraction in Fingerprint Images Bir Bhanu, Michael Boshra and Xuejun Tan Center for Research in Intelligent Systems University of Califomia, Riverside, CA 9252 1, USA Email:
Filterbank-Based Fingerprint Matching. Multimedia Systems Project. Niveditha Amarnath Samir Shah
 Filterbank-Based Fingerprint Matching Multimedia Systems Project Niveditha Amarnath Samir Shah Presentation overview Introduction Background Algorithm Limitations and Improvements Conclusions and future
Filterbank-Based Fingerprint Matching Multimedia Systems Project Niveditha Amarnath Samir Shah Presentation overview Introduction Background Algorithm Limitations and Improvements Conclusions and future
Fingerprint Recognition
 Fingerprint Recognition Anil K. Jain Michigan State University jain@cse.msu.edu http://biometrics.cse.msu.edu Outline Brief History Fingerprint Representation Minutiae-based Fingerprint Recognition Fingerprint
Fingerprint Recognition Anil K. Jain Michigan State University jain@cse.msu.edu http://biometrics.cse.msu.edu Outline Brief History Fingerprint Representation Minutiae-based Fingerprint Recognition Fingerprint
International Journal of Advanced Research in Computer Science and Software Engineering
 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: Fingerprint Recognition using Robust Local Features Madhuri and
ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: Fingerprint Recognition using Robust Local Features Madhuri and
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
REINFORCED FINGERPRINT MATCHING METHOD FOR AUTOMATED FINGERPRINT IDENTIFICATION SYSTEM
 REINFORCED FINGERPRINT MATCHING METHOD FOR AUTOMATED FINGERPRINT IDENTIFICATION SYSTEM 1 S.Asha, 2 T.Sabhanayagam 1 Lecturer, Department of Computer science and Engineering, Aarupadai veedu institute of
REINFORCED FINGERPRINT MATCHING METHOD FOR AUTOMATED FINGERPRINT IDENTIFICATION SYSTEM 1 S.Asha, 2 T.Sabhanayagam 1 Lecturer, Department of Computer science and Engineering, Aarupadai veedu institute of
An Overview of Biometric Image Processing
 An Overview of Biometric Image Processing CHAPTER 2 AN OVERVIEW OF BIOMETRIC IMAGE PROCESSING The recognition of persons on the basis of biometric features is an emerging phenomenon in our society. Traditional
An Overview of Biometric Image Processing CHAPTER 2 AN OVERVIEW OF BIOMETRIC IMAGE PROCESSING The recognition of persons on the basis of biometric features is an emerging phenomenon in our society. Traditional
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
CPSC 695. Geometric Algorithms in Biometrics. Dr. Marina L. Gavrilova
 CPSC 695 Geometric Algorithms in Biometrics Dr. Marina L. Gavrilova Biometric goals Verify users Identify users Synthesis - recently Biometric identifiers Courtesy of Bromba GmbH Classification of identifiers
CPSC 695 Geometric Algorithms in Biometrics Dr. Marina L. Gavrilova Biometric goals Verify users Identify users Synthesis - recently Biometric identifiers Courtesy of Bromba GmbH Classification of identifiers
An introduction on several biometric modalities. Yuning Xu
 An introduction on several biometric modalities Yuning Xu The way human beings use to recognize each other: equip machines with that capability Passwords can be forgotten, tokens can be lost Post-9/11
An introduction on several biometric modalities Yuning Xu The way human beings use to recognize each other: equip machines with that capability Passwords can be forgotten, tokens can be lost Post-9/11
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Fingerprint Mosaicking by Rolling with Sliding
 Fingerprint Mosaicking by Rolling with Sliding Kyoungtaek Choi, Hunjae Park, Hee-seung Choi and Jaihie Kim Department of Electrical and Electronic Engineering,Yonsei University Biometrics Engineering Research
Fingerprint Mosaicking by Rolling with Sliding Kyoungtaek Choi, Hunjae Park, Hee-seung Choi and Jaihie Kim Department of Electrical and Electronic Engineering,Yonsei University Biometrics Engineering Research
Fingerprint Authentication for SIS-based Healthcare Systems
 Fingerprint Authentication for SIS-based Healthcare Systems Project Report Introduction In many applications there is need for access control on certain sensitive data. This is especially true when it
Fingerprint Authentication for SIS-based Healthcare Systems Project Report Introduction In many applications there is need for access control on certain sensitive data. This is especially true when it
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Fast and Robust Projective Matching for Fingerprints using Geometric Hashing
 Fast and Robust Projective Matching for Fingerprints using Geometric Hashing Rintu Boro Sumantra Dutta Roy Department of Electrical Engineering, IIT Bombay, Powai, Mumbai - 400 076, INDIA {rintu, sumantra}@ee.iitb.ac.in
Fast and Robust Projective Matching for Fingerprints using Geometric Hashing Rintu Boro Sumantra Dutta Roy Department of Electrical Engineering, IIT Bombay, Powai, Mumbai - 400 076, INDIA {rintu, sumantra}@ee.iitb.ac.in
Using Support Vector Machines to Eliminate False Minutiae Matches during Fingerprint Verification
 Using Support Vector Machines to Eliminate False Minutiae Matches during Fingerprint Verification Abstract Praveer Mansukhani, Sergey Tulyakov, Venu Govindaraju Center for Unified Biometrics and Sensors
Using Support Vector Machines to Eliminate False Minutiae Matches during Fingerprint Verification Abstract Praveer Mansukhani, Sergey Tulyakov, Venu Govindaraju Center for Unified Biometrics and Sensors
Palmprint Recognition Using Transform Domain and Spatial Domain Techniques
 Palmprint Recognition Using Transform Domain and Spatial Domain Techniques Jayshri P. Patil 1, Chhaya Nayak 2 1# P. G. Student, M. Tech. Computer Science and Engineering, 2* HOD, M. Tech. Computer Science
Palmprint Recognition Using Transform Domain and Spatial Domain Techniques Jayshri P. Patil 1, Chhaya Nayak 2 1# P. G. Student, M. Tech. Computer Science and Engineering, 2* HOD, M. Tech. Computer Science
Biometric Security Roles & Resources
 Biometric Security Roles & Resources Part 1 Biometric Systems Skip Linehan Biometrics Systems Architect, Raytheon Intelligence and Information Systems Outline Biometrics Overview Biometric Architectures
Biometric Security Roles & Resources Part 1 Biometric Systems Skip Linehan Biometrics Systems Architect, Raytheon Intelligence and Information Systems Outline Biometrics Overview Biometric Architectures
Peg-Free Hand Geometry Verification System
 Peg-Free Hand Geometry Verification System Pavan K Rudravaram Venu Govindaraju Center for Unified Biometrics and Sensors (CUBS), University at Buffalo,New York,USA. {pkr, govind} @cedar.buffalo.edu http://www.cubs.buffalo.edu
Peg-Free Hand Geometry Verification System Pavan K Rudravaram Venu Govindaraju Center for Unified Biometrics and Sensors (CUBS), University at Buffalo,New York,USA. {pkr, govind} @cedar.buffalo.edu http://www.cubs.buffalo.edu
Polar Harmonic Transform for Fingerprint Recognition
 International Journal Of Engineering Research And Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 13, Issue 11 (November 2017), PP.50-55 Polar Harmonic Transform for Fingerprint
International Journal Of Engineering Research And Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 13, Issue 11 (November 2017), PP.50-55 Polar Harmonic Transform for Fingerprint
Keywords Wavelet decomposition, SIFT, Unibiometrics, Multibiometrics, Histogram Equalization.
 Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Secure and Reliable
Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Secure and Reliable
Fingerprint Matching Incorporating Ridge Features Using Contourlet Transforms
 Fingerprint Matching Incorporating Ridge Features Using Contourlet Transforms M.S. Keerthana 1 Student,Department of CSE, K.S.Rangasamy College Of Technology,Tiruchengode,TamilNadu, India 1 ABSTRACT: This
Fingerprint Matching Incorporating Ridge Features Using Contourlet Transforms M.S. Keerthana 1 Student,Department of CSE, K.S.Rangasamy College Of Technology,Tiruchengode,TamilNadu, India 1 ABSTRACT: This
International Journal of Advanced Research in Computer Science and Software Engineering
 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: Increasing The Accuracy Of An Existing Fingerprint Recognition
ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: Increasing The Accuracy Of An Existing Fingerprint Recognition
Synopsis. An Efficient Approach for Partial Fingerprint Recognition Based on Pores and SIFT Features using Fusion Methods
 Synopsis An Efficient Approach for Partial Fingerprint Recognition Based on Pores and SIFT Features using Fusion Methods Submitted By Mrs.S.Malathi Supervisor Dr(Mrs.) C.Meena Submitted To Avinashilingam
Synopsis An Efficient Approach for Partial Fingerprint Recognition Based on Pores and SIFT Features using Fusion Methods Submitted By Mrs.S.Malathi Supervisor Dr(Mrs.) C.Meena Submitted To Avinashilingam
Biometrics- Fingerprint Recognition
 International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 11 (2014), pp. 1097-1102 International Research Publications House http://www. irphouse.com Biometrics- Fingerprint
International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 4, Number 11 (2014), pp. 1097-1102 International Research Publications House http://www. irphouse.com Biometrics- Fingerprint
Advanced Touchless Biometric Identification using SIFT Features
 Advanced Touchless Biometric Identification using SIFT Features H.Abubacker Siddique PG Scholar, Department of CSE National College of Engineering Tirunelveli, Tamilnadu, India. ahamedabdul786@gmail.com
Advanced Touchless Biometric Identification using SIFT Features H.Abubacker Siddique PG Scholar, Department of CSE National College of Engineering Tirunelveli, Tamilnadu, India. ahamedabdul786@gmail.com
Fingerprint Verification applying Invariant Moments
 Fingerprint Verification applying Invariant Moments J. Leon, G Sanchez, G. Aguilar. L. Toscano. H. Perez, J. M. Ramirez National Polytechnic Institute SEPI ESIME CULHUACAN Mexico City, Mexico National
Fingerprint Verification applying Invariant Moments J. Leon, G Sanchez, G. Aguilar. L. Toscano. H. Perez, J. M. Ramirez National Polytechnic Institute SEPI ESIME CULHUACAN Mexico City, Mexico National
CHAPTER 6 EFFICIENT TECHNIQUE TOWARDS THE AVOIDANCE OF REPLAY ATTACK USING LOW DISTORTION TRANSFORM
 109 CHAPTER 6 EFFICIENT TECHNIQUE TOWARDS THE AVOIDANCE OF REPLAY ATTACK USING LOW DISTORTION TRANSFORM Security is considered to be the most critical factor in many applications. The main issues of such
109 CHAPTER 6 EFFICIENT TECHNIQUE TOWARDS THE AVOIDANCE OF REPLAY ATTACK USING LOW DISTORTION TRANSFORM Security is considered to be the most critical factor in many applications. The main issues of such
Implementation and Comparative Analysis of Rotation Invariance Techniques in Fingerprint Recognition
 RESEARCH ARTICLE OPEN ACCESS Implementation and Comparative Analysis of Rotation Invariance Techniques in Fingerprint Recognition Manisha Sharma *, Deepa Verma** * (Department Of Electronics and Communication
RESEARCH ARTICLE OPEN ACCESS Implementation and Comparative Analysis of Rotation Invariance Techniques in Fingerprint Recognition Manisha Sharma *, Deepa Verma** * (Department Of Electronics and Communication
Fingerprint Identification Using SIFT-Based Minutia Descriptors and Improved All Descriptor-Pair Matching
 Sensors 2013, 13, 3142-3156; doi:10.3390/s130303142 Article OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Fingerprint Identification Using SIFT-Based Minutia Descriptors and Improved
Sensors 2013, 13, 3142-3156; doi:10.3390/s130303142 Article OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Fingerprint Identification Using SIFT-Based Minutia Descriptors and Improved
Gurmeet Kaur 1, Parikshit 2, Dr. Chander Kant 3 1 M.tech Scholar, Assistant Professor 2, 3
 Volume 8 Issue 2 March 2017 - Sept 2017 pp. 72-80 available online at www.csjournals.com A Novel Approach to Improve the Biometric Security using Liveness Detection Gurmeet Kaur 1, Parikshit 2, Dr. Chander
Volume 8 Issue 2 March 2017 - Sept 2017 pp. 72-80 available online at www.csjournals.com A Novel Approach to Improve the Biometric Security using Liveness Detection Gurmeet Kaur 1, Parikshit 2, Dr. Chander
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
A Framework for Feature Extraction Algorithms for Automatic Fingerprint Recognition Systems
 A Framework for Feature Extraction Algorithms for Automatic Fingerprint Recognition Systems Chaohong Wu Center for Unified Biometrics and Sensors (CUBS) SUNY at Buffalo, USA Outline of the Presentation
A Framework for Feature Extraction Algorithms for Automatic Fingerprint Recognition Systems Chaohong Wu Center for Unified Biometrics and Sensors (CUBS) SUNY at Buffalo, USA Outline of the Presentation
Verifying Fingerprint Match by Local Correlation Methods
 Verifying Fingerprint Match by Local Correlation Methods Jiang Li, Sergey Tulyakov and Venu Govindaraju Abstract Most fingerprint matching algorithms are based on finding correspondences between minutiae
Verifying Fingerprint Match by Local Correlation Methods Jiang Li, Sergey Tulyakov and Venu Govindaraju Abstract Most fingerprint matching algorithms are based on finding correspondences between minutiae
Comparison of fingerprint enhancement techniques through Mean Square Error and Peak-Signal to Noise Ratio
 Comparison of fingerprint enhancement techniques through Mean Square Error and Peak-Signal to Noise Ratio M. M. Kazi A. V. Mane R. R. Manza, K. V. Kale, Professor and Head, Abstract In the fingerprint
Comparison of fingerprint enhancement techniques through Mean Square Error and Peak-Signal to Noise Ratio M. M. Kazi A. V. Mane R. R. Manza, K. V. Kale, Professor and Head, Abstract In the fingerprint
AN EFFICIENT BINARIZATION TECHNIQUE FOR FINGERPRINT IMAGES S. B. SRIDEVI M.Tech., Department of ECE
 AN EFFICIENT BINARIZATION TECHNIQUE FOR FINGERPRINT IMAGES S. B. SRIDEVI M.Tech., Department of ECE sbsridevi89@gmail.com 287 ABSTRACT Fingerprint identification is the most prominent method of biometric
AN EFFICIENT BINARIZATION TECHNIQUE FOR FINGERPRINT IMAGES S. B. SRIDEVI M.Tech., Department of ECE sbsridevi89@gmail.com 287 ABSTRACT Fingerprint identification is the most prominent method of biometric
BIOMET: A Multimodal Biometric Authentication System for Person Identification and Verification using Fingerprint and Face Recognition
 BIOMET: A Multimodal Biometric Authentication System for Person Identification and Verification using Fingerprint and Face Recognition Hiren D. Joshi Phd, Dept. of Computer Science Rollwala Computer Centre
BIOMET: A Multimodal Biometric Authentication System for Person Identification and Verification using Fingerprint and Face Recognition Hiren D. Joshi Phd, Dept. of Computer Science Rollwala Computer Centre
CSCE 548 Building Secure Software Biometrics (Something You Are) Professor Lisa Luo Spring 2018
 Professor Lisa Luo Spring 2018") CSCE 548 Building Secure Software Biometrics (Something You Are) Professor Lisa Luo Spring 2018 Previous Class Credentials Something you know (Knowledge factors) Something you have (Possession factors)
CSCE 548 Building Secure Software Biometrics (Something You Are) Professor Lisa Luo Spring 2018 Previous Class Credentials Something you know (Knowledge factors) Something you have (Possession factors)
Fingerprint Classification Using Orientation Field Flow Curves
 Fingerprint Classification Using Orientation Field Flow Curves Sarat C. Dass Michigan State University sdass@msu.edu Anil K. Jain Michigan State University ain@msu.edu Abstract Manual fingerprint classification
Fingerprint Classification Using Orientation Field Flow Curves Sarat C. Dass Michigan State University sdass@msu.edu Anil K. Jain Michigan State University ain@msu.edu Abstract Manual fingerprint classification
DEFORMABLE MATCHING OF HAND SHAPES FOR USER VERIFICATION. Ani1 K. Jain and Nicolae Duta
 DEFORMABLE MATCHING OF HAND SHAPES FOR USER VERIFICATION Ani1 K. Jain and Nicolae Duta Department of Computer Science and Engineering Michigan State University, East Lansing, MI 48824-1026, USA E-mail:
DEFORMABLE MATCHING OF HAND SHAPES FOR USER VERIFICATION Ani1 K. Jain and Nicolae Duta Department of Computer Science and Engineering Michigan State University, East Lansing, MI 48824-1026, USA E-mail:
This is the published version:
 This is the published version: Youssif, A.A.A., Chowdhury, Morshed, Ray, Sid and Nafaa, H.Y. 2007, Fingerprint recognition system using hybrid matching techniques, in 6th IEEE/ACIS International Conference
This is the published version: Youssif, A.A.A., Chowdhury, Morshed, Ray, Sid and Nafaa, H.Y. 2007, Fingerprint recognition system using hybrid matching techniques, in 6th IEEE/ACIS International Conference
Implementation of Minutiae Based Fingerprint Identification System using Crossing Number Concept
 Implementation of Based Fingerprint Identification System using Crossing Number Concept Atul S. Chaudhari #1, Dr. Girish K. Patnaik* 2, Sandip S. Patil +3 #1 Research Scholar, * 2 Professor and Head, +3
Implementation of Based Fingerprint Identification System using Crossing Number Concept Atul S. Chaudhari #1, Dr. Girish K. Patnaik* 2, Sandip S. Patil +3 #1 Research Scholar, * 2 Professor and Head, +3
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Fingerprint Deformation Models Using Minutiae Locations and Orientations
 Fingerprint Deformation Models Using Minutiae Locations and Orientations Yi Chen, Sarat Dass, Arun Ross, and Anil Jain Department of Computer Science and Engineering Michigan State University East Lansing,
Fingerprint Deformation Models Using Minutiae Locations and Orientations Yi Chen, Sarat Dass, Arun Ross, and Anil Jain Department of Computer Science and Engineering Michigan State University East Lansing,
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Final Project Report: Filterbank-Based Fingerprint Matching
 Sabanci University TE 407 Digital Image Processing Final Project Report: Filterbank-Based Fingerprint Matching June 28, 2004 Didem Gözüpek & Onur Sarkan 5265 5241 1 1. Introduction The need for security
Sabanci University TE 407 Digital Image Processing Final Project Report: Filterbank-Based Fingerprint Matching June 28, 2004 Didem Gözüpek & Onur Sarkan 5265 5241 1 1. Introduction The need for security
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Mahmood Fathy Computer Engineering Department Iran University of science and technology Tehran, Iran
 1 Alignment-Free Fingerprint Cryptosystem Based On Multiple Fuzzy Vault and Minutia Local Structures Ali Akbar Nasiri Computer Engineering Department Iran University of science and technology Tehran, Iran
1 Alignment-Free Fingerprint Cryptosystem Based On Multiple Fuzzy Vault and Minutia Local Structures Ali Akbar Nasiri Computer Engineering Department Iran University of science and technology Tehran, Iran
A New Pairing Method for Latent and Rolled Finger Prints Matching
 International Journal of Emerging Engineering Research and Technology Volume 2, Issue 3, June 2014, PP 163-167 ISSN 2349-4395 (Print) & ISSN 2349-4409 (Online) A New Pairing Method for Latent and Rolled
International Journal of Emerging Engineering Research and Technology Volume 2, Issue 3, June 2014, PP 163-167 ISSN 2349-4395 (Print) & ISSN 2349-4409 (Online) A New Pairing Method for Latent and Rolled
Multimodal Biometric System:- Fusion Of Face And Fingerprint Biometrics At Match Score Fusion Level
 Multimodal Biometric System:- Fusion Of Face And Fingerprint Biometrics At Match Score Fusion Level Grace Wangari Mwaura, Prof. Waweru Mwangi, Dr. Calvins Otieno Abstract:- Biometrics has developed to
Multimodal Biometric System:- Fusion Of Face And Fingerprint Biometrics At Match Score Fusion Level Grace Wangari Mwaura, Prof. Waweru Mwangi, Dr. Calvins Otieno Abstract:- Biometrics has developed to
Finger Print Enhancement Using Minutiae Based Algorithm
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 8, August 2014,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 8, August 2014,
Thumb based Biometric Authentication Scheme in WLAN using Gauss Iterated Map and One Time Password
 Thumb based Biometric Authentication Scheme in WLAN using Gauss Iterated Map and One Time Password Sanjay Kumar* Department of Computer Science and Engineering National Institute of Technology Jamshedpur,
Thumb based Biometric Authentication Scheme in WLAN using Gauss Iterated Map and One Time Password Sanjay Kumar* Department of Computer Science and Engineering National Institute of Technology Jamshedpur,
Chapter 6. Multibiometrics
 148 Chapter 6 Multibiometrics 149 Chapter 6 Multibiometrics In the previous chapters information integration involved looking for complementary information present in a single biometric trait, namely,
148 Chapter 6 Multibiometrics 149 Chapter 6 Multibiometrics In the previous chapters information integration involved looking for complementary information present in a single biometric trait, namely,
Operators-Based on Second Derivative double derivative Laplacian operator Laplacian Operator Laplacian Of Gaussian (LOG) Operator LOG
 Operator LOG") Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Fingerprint Matching Using Minutiae Feature Hardikkumar V. Patel, Kalpesh Jadav
 Fingerprint Matching Using Minutiae Feature Hardikkumar V. Patel, Kalpesh Jadav Abstract- Fingerprints have been used in identification of individuals for many years because of the famous fact that each
Fingerprint Matching Using Minutiae Feature Hardikkumar V. Patel, Kalpesh Jadav Abstract- Fingerprints have been used in identification of individuals for many years because of the famous fact that each
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Carmen Alonso Montes 23rd-27th November 2015
 Practical Computer Vision: Theory & Applications 23rd-27th November 2015 Wrap up Today, we are here 2 Learned concepts Hough Transform Distance mapping Watershed Active contours 3 Contents Wrap up Object
Practical Computer Vision: Theory & Applications 23rd-27th November 2015 Wrap up Today, we are here 2 Learned concepts Hough Transform Distance mapping Watershed Active contours 3 Contents Wrap up Object
Tutorial 1. Jun Xu, Teaching Asistant January 26, COMP4134 Biometrics Authentication
 Tutorial 1 Jun Xu, Teaching Asistant csjunxu@comp.polyu.edu.hk COMP4134 Biometrics Authentication January 26, 2017 Table of Contents Problems Problem 1: Answer the following questions Problem 2: Biometric
Tutorial 1 Jun Xu, Teaching Asistant csjunxu@comp.polyu.edu.hk COMP4134 Biometrics Authentication January 26, 2017 Table of Contents Problems Problem 1: Answer the following questions Problem 2: Biometric
Feature-level Fusion for Effective Palmprint Authentication
 Feature-level Fusion for Effective Palmprint Authentication Adams Wai-Kin Kong 1, 2 and David Zhang 1 1 Biometric Research Center, Department of Computing The Hong Kong Polytechnic University, Kowloon,
Feature-level Fusion for Effective Palmprint Authentication Adams Wai-Kin Kong 1, 2 and David Zhang 1 1 Biometric Research Center, Department of Computing The Hong Kong Polytechnic University, Kowloon,
Touchless Fingerprint recognition using MATLAB
 International Journal of Innovation and Scientific Research ISSN 2351-814 Vol. 1 No. 2 Oct. 214, pp. 458-465 214 Innovative Space of Scientific Research Journals http://www.ijisr.issr-journals.org/ Touchless
International Journal of Innovation and Scientific Research ISSN 2351-814 Vol. 1 No. 2 Oct. 214, pp. 458-465 214 Innovative Space of Scientific Research Journals http://www.ijisr.issr-journals.org/ Touchless
Fingerprint Retrieval Based on Database Clustering
 Fingerprint Retrieval Based on Database Clustering Liu Manhua School of Electrical & Electronic Engineering A thesis submitted to the Nanyang Technological University in fulfillment of the requirements
Fingerprint Retrieval Based on Database Clustering Liu Manhua School of Electrical & Electronic Engineering A thesis submitted to the Nanyang Technological University in fulfillment of the requirements
Chapter 3: User Authentication
 Chapter 3: User Authentication Comp Sci 3600 Security Outline 1 2 3 4 Outline 1 2 3 4 User Authentication NIST SP 800-63-3 (Digital Authentication Guideline, October 2016) defines user as: The process
Chapter 3: User Authentication Comp Sci 3600 Security Outline 1 2 3 4 Outline 1 2 3 4 User Authentication NIST SP 800-63-3 (Digital Authentication Guideline, October 2016) defines user as: The process
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Graph Matching Iris Image Blocks with Local Binary Pattern
 Graph Matching Iris Image Blocs with Local Binary Pattern Zhenan Sun, Tieniu Tan, and Xianchao Qiu Center for Biometrics and Security Research, National Laboratory of Pattern Recognition, Institute of
Graph Matching Iris Image Blocs with Local Binary Pattern Zhenan Sun, Tieniu Tan, and Xianchao Qiu Center for Biometrics and Security Research, National Laboratory of Pattern Recognition, Institute of
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Designing of Fingerprint Enhancement Based on Curved Region Based Ridge Frequency Estimation
 Designing of Fingerprint Enhancement Based on Curved Region Based Ridge Frequency Estimation Navjot Kaur #1, Mr. Gagandeep Singh #2 #1 M. Tech:Computer Science Engineering, Punjab Technical University
Designing of Fingerprint Enhancement Based on Curved Region Based Ridge Frequency Estimation Navjot Kaur #1, Mr. Gagandeep Singh #2 #1 M. Tech:Computer Science Engineering, Punjab Technical University
A Comparative Study of Palm Print Recognition Systems
 A Comparative Study of Palm Print Recognition Systems Akash Patel akash.patel@somaiya.edu Chinmayi Tidke chinmayi.t@somaiya.edu Chirag Dhamecha Mumbai India chirag.d@somaiya.edu Kavisha Shah kavisha.shah@somaiya.edu
A Comparative Study of Palm Print Recognition Systems Akash Patel akash.patel@somaiya.edu Chinmayi Tidke chinmayi.t@somaiya.edu Chirag Dhamecha Mumbai India chirag.d@somaiya.edu Kavisha Shah kavisha.shah@somaiya.edu
An approach for Fingerprint Recognition based on Minutia Points
 An approach for Fingerprint Recognition based on Minutia Points Vidita Patel 1, Kajal Thacker 2, Ass. Prof. Vatsal Shah 3 1 Information and Technology Department, BVM Engineering College, patelvidita05@gmail.com
An approach for Fingerprint Recognition based on Minutia Points Vidita Patel 1, Kajal Thacker 2, Ass. Prof. Vatsal Shah 3 1 Information and Technology Department, BVM Engineering College, patelvidita05@gmail.com
An Approach to Demonstrate the Fallacies of Current Fingerprint Technology
 An Approach to Demonstrate the Fallacies of Current Fingerprint Technology Pinaki Satpathy 1, Banibrata Bag 1, Akinchan Das 1, Raj Kumar Maity 1, Moumita Jana 1 Assistant Professor in Electronics & Comm.
An Approach to Demonstrate the Fallacies of Current Fingerprint Technology Pinaki Satpathy 1, Banibrata Bag 1, Akinchan Das 1, Raj Kumar Maity 1, Moumita Jana 1 Assistant Professor in Electronics & Comm.
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Improving Latent Fingerprint Matching Performance by Orientation Field Estimation using Localized Dictionaries
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 11, November 2014,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 11, November 2014,
Fingerprint Recognition System for Low Quality Images
 Fingerprint Recognition System for Low Quality Images Zin Mar Win and Myint Myint Sein University of Computer Studies, Yangon, Myanmar zmwucsy@gmail.com Department of Research and Development University
Fingerprint Recognition System for Low Quality Images Zin Mar Win and Myint Myint Sein University of Computer Studies, Yangon, Myanmar zmwucsy@gmail.com Department of Research and Development University
6. Multimodal Biometrics
 6. Multimodal Biometrics Multimodal biometrics is based on combination of more than one type of biometric modalities or traits. The most compelling reason to combine different modalities is to improve
6. Multimodal Biometrics Multimodal biometrics is based on combination of more than one type of biometric modalities or traits. The most compelling reason to combine different modalities is to improve
Multimodal Biometric System by Feature Level Fusion of Palmprint and Fingerprint
 Multimodal Biometric System by Feature Level Fusion of Palmprint and Fingerprint Navdeep Bajwa M.Tech (Student) Computer Science GIMET, PTU Regional Center Amritsar, India Er. Gaurav Kumar M.Tech (Supervisor)
Multimodal Biometric System by Feature Level Fusion of Palmprint and Fingerprint Navdeep Bajwa M.Tech (Student) Computer Science GIMET, PTU Regional Center Amritsar, India Er. Gaurav Kumar M.Tech (Supervisor)
Fingerprint Recognition using Texture Features
 Fingerprint Recognition using Texture Features Manidipa Saha, Jyotismita Chaki, Ranjan Parekh,, School of Education Technology, Jadavpur University, Kolkata, India Abstract: This paper proposes an efficient
Fingerprint Recognition using Texture Features Manidipa Saha, Jyotismita Chaki, Ranjan Parekh,, School of Education Technology, Jadavpur University, Kolkata, India Abstract: This paper proposes an efficient
FINGERPRINTS IDENTIFICATION AND VERIFICATION BASED ON LOCAL DENSITY DISTRIBUTION WITH ROTATION COMPENSATION
 FINGERPRINTS IDENTIFICATION AND VERIFICATION BASED ON LOCAL DENSITY DISTRIBUTION WITH ROTATION COMPENSATION 1 ZAINAB J. AHMED, 2 DR. LOAY E. GEORGE 1 Department of Biology Science, College of Science,
FINGERPRINTS IDENTIFICATION AND VERIFICATION BASED ON LOCAL DENSITY DISTRIBUTION WITH ROTATION COMPENSATION 1 ZAINAB J. AHMED, 2 DR. LOAY E. GEORGE 1 Department of Biology Science, College of Science,
A Survey on Security in Palmprint Recognition: A Biometric Trait
 A Survey on Security in Palmprint Recognition: A Biometric Trait Dhaneshwar Prasad Dewangan 1, Abhishek Pandey 2 Abstract Biometric based authentication and recognition, the science of using physical or
A Survey on Security in Palmprint Recognition: A Biometric Trait Dhaneshwar Prasad Dewangan 1, Abhishek Pandey 2 Abstract Biometric based authentication and recognition, the science of using physical or
A new approach to reference point location in fingerprint recognition
 A new approach to reference point location in fingerprint recognition Piotr Porwik a) and Lukasz Wieclaw b) Institute of Informatics, Silesian University 41 200 Sosnowiec ul. Bedzinska 39, Poland a) porwik@us.edu.pl
A new approach to reference point location in fingerprint recognition Piotr Porwik a) and Lukasz Wieclaw b) Institute of Informatics, Silesian University 41 200 Sosnowiec ul. Bedzinska 39, Poland a) porwik@us.edu.pl
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Fingerprint Image Enhancement Algorithm and Performance Evaluation
 Fingerprint Image Enhancement Algorithm and Performance Evaluation Naja M I, Rajesh R M Tech Student, College of Engineering, Perumon, Perinad, Kerala, India Project Manager, NEST GROUP, Techno Park, TVM,
Fingerprint Image Enhancement Algorithm and Performance Evaluation Naja M I, Rajesh R M Tech Student, College of Engineering, Perumon, Perinad, Kerala, India Project Manager, NEST GROUP, Techno Park, TVM,
CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION
 CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION 6.1 INTRODUCTION Fuzzy logic based computational techniques are becoming increasingly important in the medical image analysis arena. The significant
CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION 6.1 INTRODUCTION Fuzzy logic based computational techniques are becoming increasingly important in the medical image analysis arena. The significant
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Outline. Incorporating Biometric Quality In Multi-Biometrics FUSION. Results. Motivation. Image Quality: The FVC Experience
 Incorporating Biometric Quality In Multi-Biometrics FUSION QUALITY Julian Fierrez-Aguilar, Javier Ortega-Garcia Biometrics Research Lab. - ATVS Universidad Autónoma de Madrid, SPAIN Loris Nanni, Raffaele
Incorporating Biometric Quality In Multi-Biometrics FUSION QUALITY Julian Fierrez-Aguilar, Javier Ortega-Garcia Biometrics Research Lab. - ATVS Universidad Autónoma de Madrid, SPAIN Loris Nanni, Raffaele
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
User Identification by Hierarchical Fingerprint and Palmprint Matching
 User Identification by Hierarchical Fingerprint and Palmprint Matching Annapoorani D #1, Caroline Viola Stella Mary M *2 # PG Scholar, Department of Information Technology, * Prof. and HOD, Department
User Identification by Hierarchical Fingerprint and Palmprint Matching Annapoorani D #1, Caroline Viola Stella Mary M *2 # PG Scholar, Department of Information Technology, * Prof. and HOD, Department
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
AN EFFICIENT METHOD FOR FINGERPRINT RECOGNITION FOR NOISY IMAGES
 International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 113-117 AN EFFICIENT METHOD FOR FINGERPRINT RECOGNITION FOR NOISY IMAGES Vijay V. Chaudhary 1 and S.R.
International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 113-117 AN EFFICIENT METHOD FOR FINGERPRINT RECOGNITION FOR NOISY IMAGES Vijay V. Chaudhary 1 and S.R.
Face Recognition using Eigenfaces SMAI Course Project
 Face Recognition using Eigenfaces SMAI Course Project Satarupa Guha IIIT Hyderabad 201307566 satarupa.guha@research.iiit.ac.in Ayushi Dalmia IIIT Hyderabad 201307565 ayushi.dalmia@research.iiit.ac.in Abstract
Face Recognition using Eigenfaces SMAI Course Project Satarupa Guha IIIT Hyderabad 201307566 satarupa.guha@research.iiit.ac.in Ayushi Dalmia IIIT Hyderabad 201307565 ayushi.dalmia@research.iiit.ac.in Abstract
Image Enhancement Techniques for Fingerprint Identification
 March 2013 1 Image Enhancement Techniques for Fingerprint Identification Pankaj Deshmukh, Siraj Pathan, Riyaz Pathan Abstract The aim of this paper is to propose a new method in fingerprint enhancement
March 2013 1 Image Enhancement Techniques for Fingerprint Identification Pankaj Deshmukh, Siraj Pathan, Riyaz Pathan Abstract The aim of this paper is to propose a new method in fingerprint enhancement
Implementation of Fingerprint Matching Algorithm
 RESEARCH ARTICLE International Journal of Engineering and Techniques - Volume 2 Issue 2, Mar Apr 2016 Implementation of Fingerprint Matching Algorithm Atul Ganbawle 1, Prof J.A. Shaikh 2 Padmabhooshan
RESEARCH ARTICLE International Journal of Engineering and Techniques - Volume 2 Issue 2, Mar Apr 2016 Implementation of Fingerprint Matching Algorithm Atul Ganbawle 1, Prof J.A. Shaikh 2 Padmabhooshan
FINGERPRINT RECOGNITION BASED ON SPECTRAL FEATURE EXTRACTION
 FINGERPRINT RECOGNITION BASED ON SPECTRAL FEATURE EXTRACTION Nadder Hamdy, Magdy Saeb 2, Ramy Zewail, and Ahmed Seif Arab Academy for Science, Technology & Maritime Transport School of Engineering,. Electronics
FINGERPRINT RECOGNITION BASED ON SPECTRAL FEATURE EXTRACTION Nadder Hamdy, Magdy Saeb 2, Ramy Zewail, and Ahmed Seif Arab Academy for Science, Technology & Maritime Transport School of Engineering,. Electronics