Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
|
|
|
- Aron Wilkerson
- 5 years ago
- Views:
Transcription
1 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
2 Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan, or a map and a map, find the rigid-body transformation (translation+rotation) that aligns them best Benefits: Improved proposal distribution (e.g., gmapping) Scan-matching objectives, even when not meaningful probabilities, can be used in graphslam / pose-graph SLAM Approaches: Optimize over x: p(z x, m), with: 1. p(z x, m) = beam sensor model --- sensor beam full readings <-> map 2. p(z x, m) = likelihood field model --- sensor beam endpoints <-> likelihood field 3. p(m local x, m) = map matching model --- local map <-> global map Reduce both entities to a set of points, align the point clouds through the Iterative Closest Points (ICP) 4. cloud of points <-> cloud of points --- sensor beam endpoints <-> sensor beam endpoints Other popular use (outside of SLAM): pose estimation and verification of presence for objects detected in point cloud data
3 Outline 1. Beam Sensor Model 2. Likelihood Field Model 3. Map Matching 4. Iterated Closest Points (ICP)
4 Beam-based Proximity Model Measurement noise Unexpected obstacles 0 z exp z max 0 z exp z max P hit ( z x, m) = η 1 2πb e 1 ( z z 2 b 2 exp ) P unexp ( z x, m) = λz η λ e z < z exp 0 otherwise 4
5 Beam-based Proximity Model Random measurement Max range 0 z exp z max 0 z exp z max P rand ( z x, m) = η 1 z max P max ( z x, m) = η 1 z small 5
6 6 Resulting Mixture Density = ), ( ), ( ), ( ), ( ), ( rand max unexp hit rand max unexp hit m x z P m x z P m x z P m x z P m x z P T α α α α How can we determine the model parameters?
7 Approximation Results Laser 300cm Sonar 400cm 7
8 Summary Beam Sensor Model Assumes independence between beams. Justification? Overconfident! Models physical causes for measurements. Mixture of densities for these causes. Assumes independence between causes. Problem? Implementation Learn parameters based on real data. Different models should be learned for different angles at which the sensor beam hits the obstacle. Determine expected distances by ray-tracing. Expected distances can be pre-processed. 8
9 Drawbacks Beam Sensor Model Lack of smoothness P(z x_t, m) is not smooth in x_t Problematic consequences: For sampling based methods: nearby points have very different likelihoods, which could result in requiring large numbers of samples to hit some reasonably likely states Hill-climbing methods that try to find the locally most likely x_t have limited abilities per many local optima Computationally expensive Need to ray-cast for every sensor reading Could pre-compute over discrete set of states (and then interpolate), but table is large per covering a 3-D space and in SLAM the map (and hence table) change over time
10 Outline 1. Beam Sensor Model 2. Likelihood Field Model 3. Map Matching 4. Iterated Closest Points (ICP)
11 Likelihood Field Model aka Beam Endpoint Model aka Scan-based Model Overcomes lack-of-smoothness and computational limitations of Sensor Beam Model Ad-hoc algorithm: not considering a conditional probability relative to any meaningful generative model of the physics of sensors Works well in practice. Idea: Instead of following along the beam (which is expensive!) just check the end-point. The likelihood p(z x t, m) is given by: with d = distance from end-point to nearest obstacle.
12 Algorithm: likelihood_field_range_finder_model(z t, x t, m) In practice: pre-compute likelihood field over (2-D) grid. 12

13 Example Likelihood field Map m P(z x,m) Note: p(z x,m) is not really a density, as it does not normalize to one when integrating over all z 13


14 San Jose Tech Museum Occupancy grid map Likelihood field 14
15 Drawbacks of Likelihood Field Model No explicit modeling of people and other dynamics that might cause short readings No modeling of the beam --- treats sensor as if it can see through walls Cannot handle unexplored areas Fix: when endpoint in unexplored area, have p(z t x t, m) = 1 / z max
16 Scan Matching As usual, maximize over x t the likelihood p(z t x t, m) The objective p(z t x t, m) now corresponds to the likelihood field based score 16
 and use it to match the next scan.")
17 Scan Matching Can also match two scans: for first scan extract likelihood field (treating each beam endpoint as occupied space) and use it to match the next scan. [can also symmetrize this] 17
18 Properties of Likelihood Field based Scan Matching Highly efficient, uses 2D tables only. Smooth w.r.t. to small changes in robot position. Allows gradient descent, scan matching. Ignores physical properties of beams. 19
19 Outline 1. Beam Sensor Model 2. Likelihood Field Model 3. Map Matching 4. Iterated Closest Points (ICP)
20 Map Matching Generate small, local maps from sensor data and match local maps against global model. Correlation score: with Likelihood interpretation: To obtain smoothness: convolve the map m with a Gaussian, and run map matching on the smoothed map
21 Outline 1. Beam Sensor Model 2. Likelihood Field Model 3. Map Matching 4. Iterated Closest Points (ICP)

22 Motivation 23


23 Known Correspondences Given: two corresponding point sets: Wanted: translation t and rotation R that minimizes the sum of the squared error: Where and are corresponding points. 24
24 Key Idea If the correct correspondences are known, the correct relative rotation/translation can be calculated in closed form. 25
25 Center of Mass and are the centers of mass of the two point sets. Idea: Subtract the corresponding center of mass from every point in the two point sets before calculating the transformation. The resulting point sets are: and 26
26 SVD Let denote the singular value decomposition (SVD) of W by: where are unitary, and are the singular values of W. 27
27 SVD Theorem (without proof): If rank(w) = 3, the optimal solution of E(R,t) is unique and is given by: The minimal value of error function at (R,t) is: 28
28 Unknown Data Association If correct correspondences are not known, it is generally impossible to determine the optimal relative rotation/ translation in one step 29
29 ICP-Algorithm Idea: iterate to find alignment Iterated Closest Points (ICP) [Besl & McKay 92] Converges if starting positions are close enough 30
30 ICP-Variants Variants on the following stages of ICP have been proposed: 1. Point subsets (from one or both point sets) 2. Weighting the correspondences 3. Data association 4. Rejecting certain (outlier) point pairs 32
31 Performance of Variants Various aspects of performance: Speed Stability (local minima) Tolerance wrt. noise and/or outliers Basin of convergence (maximum initial misalignment) Here: properties of these variants 33
32 ICP Variants 1. Point subsets (from one or both point sets) 2. Weighting the correspondences 3. Data association 4. Rejecting certain (outlier) point pairs 34
33 Selecting Source Points Use all points Uniform sub-sampling Random sampling Feature based Sampling Normal-space sampling Ensure that samples have normals distributed as uniformly as possible 35
34 Normal-Space Sampling uniform sampling normal-space sampling 36
 Extracted Features (~5.")
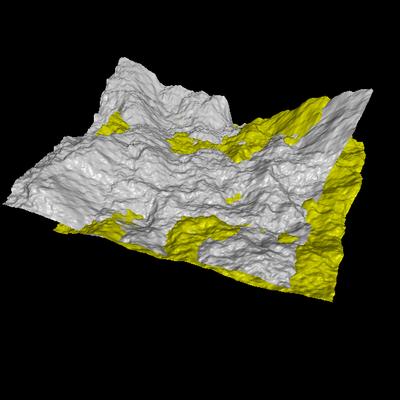
35 Feature-Based Sampling try to find important points decrease the number of correspondences higher efficiency and higher accuracy requires preprocessing 3D Scan (~ Points) Extracted Features (~5.000 Points) 38

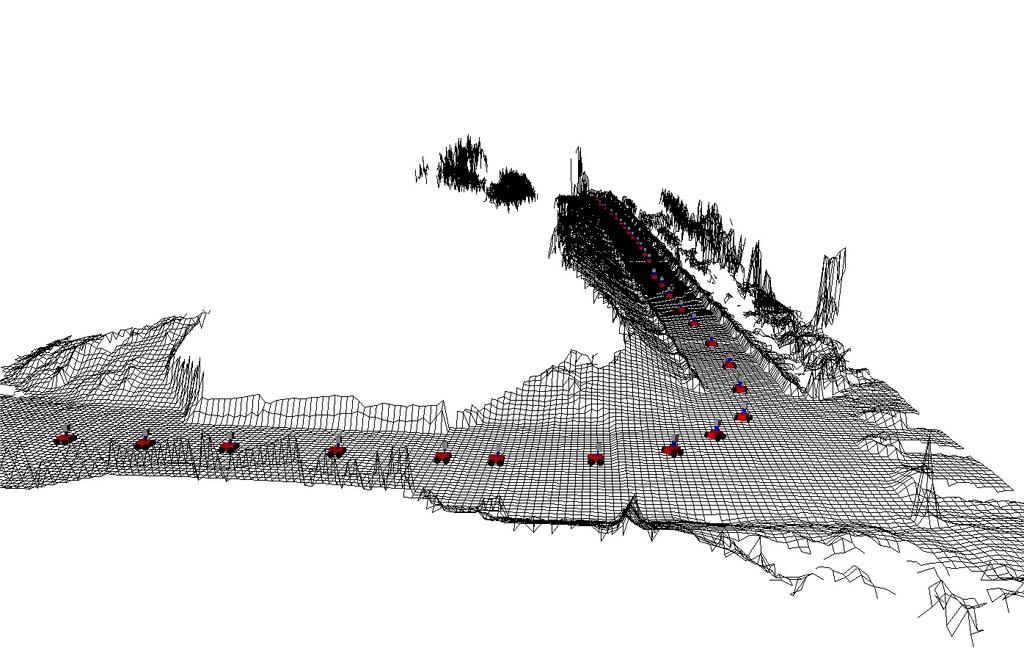
36 Application [Nuechter et al., 04] 39
37 ICP Variants 1. Point subsets (from one or both point sets) 2. Weighting the correspondences 3. Data association 4. Rejecting certain (outlier) point pairs 40
38 Selection vs. Weighting Could achieve same effect with weighting Hard to guarantee that enough samples of important features except at high sampling rates Weighting strategies turned out to be dependent on the data. Preprocessing / run-time cost tradeoff (how to find the correct weights?) 41
39 ICP Variants 1. Point subsets (from one or both point sets) 2. Weighting the correspondences 3. Data association 4. Rejecting certain (outlier) point pairs 42
40 Data Association has greatest effect on convergence and speed Closest point Normal shooting Closest compatible point Projection Using kd-trees or oc-trees 43
41 Closest-Point Matching Find closest point in other the point set Closest-point matching generally stable, but slow and requires preprocessing 44
42 Normal Shooting Project along normal, intersect other point set Slightly better than closest point for smooth structures, worse for noisy or complex structures 45
43 Point-to-Plane Error Metric Using point-to-plane distance instead of point-to-point lets flat regions slide along each other [Chen & Medioni 91] 46
44 Projection Finding the closest point is the most expensive stage of the ICP algorithm Idea: simplified nearest neighbor search For range images, one can project the points according to the view-point [Blais 95] 47
45 Projection-Based Matching Slightly worse alignments per iteration Each iteration is one to two orders of magnitude faster than closest-point Requires point-to-plane error metric 48
46 Closest Compatible Point Improves the previous two variants by considering the compatibility of the points Compatibility can be based on normals, colors, etc. In the limit, degenerates to feature matching 49
47 ICP Variants 1. Point subsets (from one or both point sets) 2. Weighting the correspondences 3. Nearest neighbor search 4. Rejecting certain (outlier) point pairs 50
48 Rejecting (outlier) point pairs sorting all correspondences with respect to there error and deleting the worst t%, Trimmed ICP (TrICP) [Chetverikov et al. 2002] t is to Estimate with respect to the Overlap Problem: Knowledge about the overlap is necessary or has to be estimated 51
49 ICP-Summary ICP is a powerful algorithm for calculating the displacement between scans. The major problem is to determine the correct data associations. Given the correct data associations, the transformation can be computed efficiently using SVD. 52
Introduction to Mobile Robotics Iterative Closest Point Algorithm. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras
 Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Three-Dimensional Sensors Lecture 6: Point-Cloud Registration
 Three-Dimensional Sensors Lecture 6: Point-Cloud Registration Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Point-Cloud Registration Methods Fuse data
Three-Dimensional Sensors Lecture 6: Point-Cloud Registration Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Point-Cloud Registration Methods Fuse data
Sensor Models / Occupancy Mapping / Density Mapping
 Statistical Techniques in Robotics (16-831, F09) Lecture #3 (09/01/2009) Sensor Models / Occupancy Mapping / Density Mapping Lecturer: Drew Bagnell Scribe: Mehmet R. Dogar 1 Sensor Models 1.1 Beam Model
Statistical Techniques in Robotics (16-831, F09) Lecture #3 (09/01/2009) Sensor Models / Occupancy Mapping / Density Mapping Lecturer: Drew Bagnell Scribe: Mehmet R. Dogar 1 Sensor Models 1.1 Beam Model
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Probabilistic Matching for 3D Scan Registration
 Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Probabilistic Matching for 3D Scan Registration Dirk Hähnel Wolfram Burgard Department of Computer Science, University of Freiburg, 79110 Freiburg, Germany Abstract In this paper we consider the problem
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
#$ % $ $& "$%% " $ '$ " '
 ! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Image Registration Lecture 4: First Examples
 Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Image Registration Lecture 4: First Examples Prof. Charlene Tsai Outline Example Intensity-based registration SSD error function Image mapping Function minimization: Gradient descent Derivative calculation
Point Cloud Processing
 Point Cloud Processing Has anyone seen the toothpaste? Given a point cloud: how do you detect and localize objects? how do you map terrain? What is a point cloud? Point cloud: a set of points in 3-D space
Point Cloud Processing Has anyone seen the toothpaste? Given a point cloud: how do you detect and localize objects? how do you map terrain? What is a point cloud? Point cloud: a set of points in 3-D space
Using Augmented Measurements to Improve the Convergence of ICP. Jacopo Serafin and Giorgio Grisetti
 Jacopo Serafin and Giorgio Grisetti Point Cloud Registration We want to find the rotation and the translation that maximize the overlap between two point clouds Page 2 Point Cloud Registration We want
Jacopo Serafin and Giorgio Grisetti Point Cloud Registration We want to find the rotation and the translation that maximize the overlap between two point clouds Page 2 Point Cloud Registration We want
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS
 FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS Michael Wünstel, Thomas Röfer Technologie-Zentrum Informatik (TZI) Universität Bremen Postfach 330 440, D-28334 Bremen {wuenstel, roefer}@informatik.uni-bremen.de
FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS Michael Wünstel, Thomas Röfer Technologie-Zentrum Informatik (TZI) Universität Bremen Postfach 330 440, D-28334 Bremen {wuenstel, roefer}@informatik.uni-bremen.de
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map
 Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
Where s the Boss? : Monte Carlo Localization for an Autonomous Ground Vehicle using an Aerial Lidar Map Sebastian Scherer, Young-Woo Seo, and Prasanna Velagapudi October 16, 2007 Robotics Institute Carnegie
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds
 Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Intensity Augmented ICP for Registration of Laser Scanner Point Clouds Bharat Lohani* and Sandeep Sashidharan *Department of Civil Engineering, IIT Kanpur Email: blohani@iitk.ac.in. Abstract While using
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Learning Occupancy Grids With Forward Sensor Models
 Learning Occupancy Grids With Forward Sensor Models Sebastian Thrun School of Computer Science Carnegie Mellon University Pittsburgh, PA 523 Abstract This article describes a new algorithm for acquiring
Learning Occupancy Grids With Forward Sensor Models Sebastian Thrun School of Computer Science Carnegie Mellon University Pittsburgh, PA 523 Abstract This article describes a new algorithm for acquiring
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
L16. Scan Matching and Image Formation
 EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
EECS568 Mobile Robotics: Methods and Principles Prof. Edwin Olson L16. Scan Matching and Image Formation Scan Matching Before After 2 Scan Matching Before After 2 Map matching has to be fast 14 robots
CPSC 340: Machine Learning and Data Mining. Principal Component Analysis Fall 2016
 CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Obstacle Avoidance (Local Path Planning)
") Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
Obstacle Avoidance (Local Path Planning) The goal of the obstacle avoidance algorithms is to avoid collisions with obstacles It is usually based on local map Often implemented as a more or less independent
A Novel Map Merging Methodology for Multi-Robot Systems
 , October 20-22, 2010, San Francisco, USA A Novel Map Merging Methodology for Multi-Robot Systems Sebahattin Topal Đsmet Erkmen Aydan M. Erkmen Abstract In this paper, we consider the problem of occupancy
, October 20-22, 2010, San Francisco, USA A Novel Map Merging Methodology for Multi-Robot Systems Sebahattin Topal Đsmet Erkmen Aydan M. Erkmen Abstract In this paper, we consider the problem of occupancy
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Localization and Map Building
 Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Localization and Map Building Noise and aliasing; odometric position estimation To localize or not to localize Belief representation Map representation Probabilistic map-based localization Other examples
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu
Machine Learning Department School of Computer Science Carnegie Mellon University. K- Means + GMMs
 10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University K- Means + GMMs Clustering Readings: Murphy 25.5 Bishop 12.1, 12.3 HTF 14.3.0 Mitchell
10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University K- Means + GMMs Clustering Readings: Murphy 25.5 Bishop 12.1, 12.3 HTF 14.3.0 Mitchell
IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS
 Improved Laser-based Navigation for Mobile Robots 79 SDU International Journal of Technologic Sciences pp. 79-92 Computer Technology IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS Muhammad AWAIS Abstract
Improved Laser-based Navigation for Mobile Robots 79 SDU International Journal of Technologic Sciences pp. 79-92 Computer Technology IMPROVED LASER-BASED NAVIGATION FOR MOBILE ROBOTS Muhammad AWAIS Abstract
NERC Gazebo simulation implementation
 NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
NERC 2015 - Gazebo simulation implementation Hannan Ejaz Keen, Adil Mumtaz Department of Electrical Engineering SBA School of Science & Engineering, LUMS, Pakistan {14060016, 14060037}@lums.edu.pk ABSTRACT
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Particle Filter Localization
 E190Q Autonomous Mobile Robots Lab 4 Particle Filter Localization INTRODUCTION Determining a robots position in a global coordinate frame is one of the most important and difficult problems to overcome
E190Q Autonomous Mobile Robots Lab 4 Particle Filter Localization INTRODUCTION Determining a robots position in a global coordinate frame is one of the most important and difficult problems to overcome
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Iterative Closest Point Algorithm in the Presence of Anisotropic Noise
 Iterative Closest Point Algorithm in the Presence of Anisotropic Noise L. Maier-Hein, T. R. dos Santos, A. M. Franz, H.-P. Meinzer German Cancer Research Center, Div. of Medical and Biological Informatics
Iterative Closest Point Algorithm in the Presence of Anisotropic Noise L. Maier-Hein, T. R. dos Santos, A. M. Franz, H.-P. Meinzer German Cancer Research Center, Div. of Medical and Biological Informatics
Function Approximation. Pieter Abbeel UC Berkeley EECS
 Function Approximation Pieter Abbeel UC Berkeley EECS Outline Value iteration with function approximation Linear programming with function approximation Value Iteration Algorithm: Start with for all s.
Function Approximation Pieter Abbeel UC Berkeley EECS Outline Value iteration with function approximation Linear programming with function approximation Value Iteration Algorithm: Start with for all s.
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
University of Florida CISE department Gator Engineering. Clustering Part 2
 Clustering Part 2 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville Partitional Clustering Original Points A Partitional Clustering Hierarchical
Clustering Part 2 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville Partitional Clustering Original Points A Partitional Clustering Hierarchical
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Robust Shape Retrieval Using Maximum Likelihood Theory
 Robust Shape Retrieval Using Maximum Likelihood Theory Naif Alajlan 1, Paul Fieguth 2, and Mohamed Kamel 1 1 PAMI Lab, E & CE Dept., UW, Waterloo, ON, N2L 3G1, Canada. naif, mkamel@pami.uwaterloo.ca 2
Robust Shape Retrieval Using Maximum Likelihood Theory Naif Alajlan 1, Paul Fieguth 2, and Mohamed Kamel 1 1 PAMI Lab, E & CE Dept., UW, Waterloo, ON, N2L 3G1, Canada. naif, mkamel@pami.uwaterloo.ca 2
Automatic registration of terrestrial laser scans for geological deformation monitoring
 Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Automatic registration of terrestrial laser scans for geological deformation monitoring Daniel Wujanz 1, Michael Avian 2, Daniel Krueger 1, Frank Neitzel 1 1 Chair of Geodesy and Adjustment Theory, Technische
Robust Regression. Robust Data Mining Techniques By Boonyakorn Jantaranuson
 Robust Regression Robust Data Mining Techniques By Boonyakorn Jantaranuson Outline Introduction OLS and important terminology Least Median of Squares (LMedS) M-estimator Penalized least squares What is
Robust Regression Robust Data Mining Techniques By Boonyakorn Jantaranuson Outline Introduction OLS and important terminology Least Median of Squares (LMedS) M-estimator Penalized least squares What is
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Clustering K-means. Machine Learning CSEP546 Carlos Guestrin University of Washington February 18, Carlos Guestrin
 Clustering K-means Machine Learning CSEP546 Carlos Guestrin University of Washington February 18, 2014 Carlos Guestrin 2005-2014 1 Clustering images Set of Images [Goldberger et al.] Carlos Guestrin 2005-2014
Clustering K-means Machine Learning CSEP546 Carlos Guestrin University of Washington February 18, 2014 Carlos Guestrin 2005-2014 1 Clustering images Set of Images [Goldberger et al.] Carlos Guestrin 2005-2014
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Operators-Based on Second Derivative double derivative Laplacian operator Laplacian Operator Laplacian Of Gaussian (LOG) Operator LOG
 Operator LOG") Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
CS 188: Artificial Intelligence Spring Today
 CS 188: Artificial Intelligence Spring 2006 Lecture 7: CSPs II 2/7/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Today More CSPs Applications Tree Algorithms Cutset
CS 188: Artificial Intelligence Spring 2006 Lecture 7: CSPs II 2/7/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Today More CSPs Applications Tree Algorithms Cutset
Robot Mapping. TORO Gradient Descent for SLAM. Cyrill Stachniss
 Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Robot Mapping TORO Gradient Descent for SLAM Cyrill Stachniss 1 Stochastic Gradient Descent Minimize the error individually for each constraint (decomposition of the problem into sub-problems) Solve one
Localization, Mapping and Exploration with Multiple Robots. Dr. Daisy Tang
 Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Localization, Mapping and Exploration with Multiple Robots Dr. Daisy Tang Two Presentations A real-time algorithm for mobile robot mapping with applications to multi-robot and 3D mapping, by Thrun, Burgard
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR
 3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Clustering: Classic Methods and Modern Views
 Clustering: Classic Methods and Modern Views Marina Meilă University of Washington mmp@stat.washington.edu June 22, 2015 Lorentz Center Workshop on Clusters, Games and Axioms Outline Paradigms for clustering
Clustering: Classic Methods and Modern Views Marina Meilă University of Washington mmp@stat.washington.edu June 22, 2015 Lorentz Center Workshop on Clusters, Games and Axioms Outline Paradigms for clustering
DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING
 Inženýrská MECHANIKA, roč. 15, 2008, č. 5, s. 337 344 337 DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING Jiří Krejsa, Stanislav Věchet* The paper presents Potential-Based
Inženýrská MECHANIKA, roč. 15, 2008, č. 5, s. 337 344 337 DEALING WITH SENSOR ERRORS IN SCAN MATCHING FOR SIMULTANEOUS LOCALIZATION AND MAPPING Jiří Krejsa, Stanislav Věchet* The paper presents Potential-Based
CS Introduction to Data Mining Instructor: Abdullah Mueen
 CS 591.03 Introduction to Data Mining Instructor: Abdullah Mueen LECTURE 8: ADVANCED CLUSTERING (FUZZY AND CO -CLUSTERING) Review: Basic Cluster Analysis Methods (Chap. 10) Cluster Analysis: Basic Concepts
CS 591.03 Introduction to Data Mining Instructor: Abdullah Mueen LECTURE 8: ADVANCED CLUSTERING (FUZZY AND CO -CLUSTERING) Review: Basic Cluster Analysis Methods (Chap. 10) Cluster Analysis: Basic Concepts
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Multi Channel Generalized-ICP
 Multi Channel Generalized-ICP James Servos and Steven L. Waslander University of Waterloo, Waterloo, ON, Canada, N2L 3G1 Abstract Current state of the art scan registration algorithms which use only positional
Multi Channel Generalized-ICP James Servos and Steven L. Waslander University of Waterloo, Waterloo, ON, Canada, N2L 3G1 Abstract Current state of the art scan registration algorithms which use only positional
First scan matching algorithms. Alberto Quattrini Li University of South Carolina
 First scan matching algorithms Alberto Quattrini Li 2015-10-22 University of South Carolina Robot mapping through scan-matching Framework for consistent registration of multiple frames of measurements
First scan matching algorithms Alberto Quattrini Li 2015-10-22 University of South Carolina Robot mapping through scan-matching Framework for consistent registration of multiple frames of measurements
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
INFO0948 Fitting and Shape Matching
 INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
Statistical Techniques in Robotics (16-831, F10) Lecture #02 (Thursday, August 28) Bayes Filtering
 Lecture #02 (Thursday, August 28) Bayes Filtering") Statistical Techniques in Robotics (16-831, F10) Lecture #02 (Thursday, August 28) Bayes Filtering Lecturer: Drew Bagnell Scribes: Pranay Agrawal, Trevor Decker, and Humphrey Hu 1 1 A Brief Example Let
Statistical Techniques in Robotics (16-831, F10) Lecture #02 (Thursday, August 28) Bayes Filtering Lecturer: Drew Bagnell Scribes: Pranay Agrawal, Trevor Decker, and Humphrey Hu 1 1 A Brief Example Let
Image Restoration using Markov Random Fields
 Image Restoration using Markov Random Fields Based on the paper Stochastic Relaxation, Gibbs Distributions and Bayesian Restoration of Images, PAMI, 1984, Geman and Geman. and the book Markov Random Field
Image Restoration using Markov Random Fields Based on the paper Stochastic Relaxation, Gibbs Distributions and Bayesian Restoration of Images, PAMI, 1984, Geman and Geman. and the book Markov Random Field
Func%on Approxima%on. Pieter Abbeel UC Berkeley EECS
 Func%on Approxima%on Pieter Abbeel UC Berkeley EECS Value Itera4on Algorithm: Start with for all s. For i=1,, H For all states s 2 S: Imprac4cal for large state spaces = the expected sum of rewards accumulated
Func%on Approxima%on Pieter Abbeel UC Berkeley EECS Value Itera4on Algorithm: Start with for all s. For i=1,, H For all states s 2 S: Imprac4cal for large state spaces = the expected sum of rewards accumulated
Clustering. Lecture 6, 1/24/03 ECS289A
 Clustering Lecture 6, 1/24/03 What is Clustering? Given n objects, assign them to groups (clusters) based on their similarity Unsupervised Machine Learning Class Discovery Difficult, and maybe ill-posed
Clustering Lecture 6, 1/24/03 What is Clustering? Given n objects, assign them to groups (clusters) based on their similarity Unsupervised Machine Learning Class Discovery Difficult, and maybe ill-posed
Multiview Stereo COSC450. Lecture 8
 Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Multiview Stereo COSC450 Lecture 8 Stereo Vision So Far Stereo and epipolar geometry Fundamental matrix captures geometry 8-point algorithm Essential matrix with calibrated cameras 5-point algorithm Intersect
Incremental Structured ICP Algorithm
 Incremental Structured ICP Algorithm Haokun Geng, Johnny Chien, Radu Nicolescu, and Reinhard Klette The.enpeda.. Project, Tamaki Campus The University of Auckland, New Zealand Abstract. Variants of the
Incremental Structured ICP Algorithm Haokun Geng, Johnny Chien, Radu Nicolescu, and Reinhard Klette The.enpeda.. Project, Tamaki Campus The University of Auckland, New Zealand Abstract. Variants of the
3D Maps. Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring Bremen 1
 Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
Towards Semantic 3D Maps Prof. Dr. Andreas Nüchter Jacobs University Bremen Campus Ring 1 28759 Bremen 1 Acknowledgements I would like to thank the following researchers for joint work and inspiration
ECS 234: Data Analysis: Clustering ECS 234
 : Data Analysis: Clustering What is Clustering? Given n objects, assign them to groups (clusters) based on their similarity Unsupervised Machine Learning Class Discovery Difficult, and maybe ill-posed
: Data Analysis: Clustering What is Clustering? Given n objects, assign them to groups (clusters) based on their similarity Unsupervised Machine Learning Class Discovery Difficult, and maybe ill-posed
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have