Introduction. Prof. Kyoung Mu Lee SoEECS, Seoul National University
|
|
|
- Harold Curtis
- 5 years ago
- Views:
Transcription
1 Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision. To introduce the main concepts and techniques used to solve those. To enable participants to implement solutions for reasonably complex problems. To enable the student to make sense of the literature of computer vision.
 A good programming skill on C, C++, MATLAB Textbook: Computer Vision: A modern")
2 Course Information Introduction 3 Classes: Mon & Wed, 10:30-11:45, Rm: Instructor: Prof. Kyoung Mu Lee kyoungmu@snu.ac.kr Tel: , Room Prerequisites: Linear algebra Probability and Statistics Image Processing (optional) A good programming skill on C, C++, MATLAB Textbook: Computer Vision: A modern approach by Forsyth & Ponce Webpage: TA: Min Su Cho, , Rm# , chominsu@gmail.com Course Information Introduction 4 Reference Books: Computer Vision, by L. G. Shapiro and G. C. Stockman, Prentice Hall, The Computer Image, by A. Watt, Addison-Wesley, Image Processing, Analysis, and Machine Vision, M. Sonka, V. Hlavac and R. Boyle, Brooks/Cole Publishing, Introductory Techniques for 3-D Computer Vision, E. Trucco and A. Verri, Prentice-Hall,1998. Machine Vision, R. Jain, R. Kasturi, and B. G. Schunck, MacGraw-Hill, A Guided Tour of Computer Vision, by V. S. Nalwa, Addison-Wesley, 1993.
3 Grading Introduction 5 Program Assignments & Quiz 50% Final Project 30% Presentation 10% Participation 10% All the Assignments and Project must be done individually What is Computer Vision? Introduction 6 Forsyth and Ponce Extracting descriptions of the world from pictures or sequences of pictures Ballard and Brown The construction of explicit, meaningful description of physical objects from images Trucco and Verri Computing properties of the 3D world from one or more digital images
4 Why study Computer Vision? Introduction 7 An image is worth 1000 words Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what) movie post-processing face detection & recognition Intelligent robots Various deep and attractive scientific mysteries how does object recognition work? Many biological systems rely on vision Greater understanding of human vision Camera and computer are cheap What Computer Vision Focuses? Introduction 8 What information should be extracted? How can it be extracted? How should it be modeled or represented? How can it be computed to achieve the goal?
5 Applications Introduction 9 Industrial inspection, quality control Surveillance and security Assisted living Human computer interfaces Intelligent robot Medical image analysis Virtual/Augmented reality Properties of Vision Introduction 10 One can see the future Cricketers avoid being hit in the head qthere s a reflex --- when the right eye sees something going left, and the left eye sees something going right, move your head fast. Gannets pull their wings back at the last moment qgannets are diving birds; they must steer with their wings, but wings break unless pulled back at the moment of contact. qarea of target over rate of change of area gives time to contact.
6 Properties of Vision Introduction 11 3D representations are easily constructed There are many different cues. Useful qto humans (avoid bumping into things; planning a grasp; etc.) qin computer vision (build models for movies). Cues include qmultiple views (motion, stereopsis) qtexture qshading qfocus/defocus qsilhouette qcalled Shape form X problem Properties of Vision Introduction 12 People draw distinctions between what is seen Object recognition This could mean is this a fish or a bicycle? It could mean is this George Washington? It could mean is this poisonous or not? It could mean is this slippery or not? It could mean will this support my weight? Great mystery qhow to build programs that can draw useful distinctions based on image properties.

")

7 Perception Introduction 13 Vision is inferential: light & shadow ( ) Perception Introduction 14 Vision is inferential: Prior knowledge



8 Perception Introduction 15 Vision is inferential: expectation Perception Depth by motion parallax Introduction 16 Ambiguity by shadow IllusionWorks ( ball.h tml )
9 Main topics Introduction 17 Camera & Light Geometry, Radiometry, Color Digital images Filters, edges, texture, optical flow Shape (and motion) recovery What is the 3D shape of what I see? Multi-view geometry Stereo, motion, photometric stereo, Segmentation What belongs together? Clustering, model fitting, probablistic Tracking Where does something go? Linear dynamics, non-linear dynamics Recognition What is it that I see? templates, relations between templates Part I: The Physics of Imaging Introduction 18 How images are formed Cameras qwhat a camera does qhow to tell where the camera was Light qhow to measure light qwhat light does at surfaces qhow the brightness values we see in cameras are determined Color qthe underlying mechanisms of color qhow to describe it and measure it
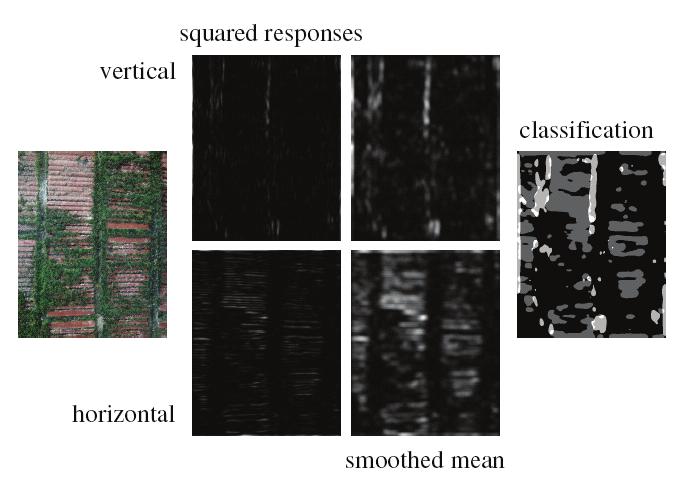
10 Part II: Early Vision in One Image Introduction 19 Representing small patches of image For three reasons qwe wish to establish correspondence between (say) points in different images, so we need to describe the neighborhood of the points qsharp changes are important in practice --- known as edges qrepresenting texture by giving some statistics of the different kinds of small patch present in the texture. Tigers have lots of bars, few spots Leopards are the other way Representing an image patch Introduction 20 Filter outputs essentially form a dot-product between a pattern and an image, while shifting the pattern across the image strong response -> image locally looks like the pattern e.g. derivatives measured by filtering with a kernel that looks like a big derivative (bright bar next to dark bar)
11 Introduction 21 Convolve this image To get this With this kernel Texture Introduction 22 Many objects are distinguished by their texture Tigers, cheetahs, grass, trees We represent texture with statistics of filter outputs For tigers, bar filters at a coarse scale respond strongly For cheetahs, spots at the same scale For grass, long narrow bars For the leaves of trees, extended spots Objects with different textures can be segmented The variation in textures is a cue to shape

12 Introduction 23 Introduction 24
 given it was here in 1 (1 and 2, etc.")


13 Part III: Early Vision in Multiple Images Introduction 25 The geometry of multiple views Where could it appear in camera 2 (3, etc.) given it was here in 1 (1 and 2, etc.)? Stereopsis What we know about the world from having 2 eyes Structure from motion What we know about the world from having many eyes qor, more commonly, our eyes moving. Shape from X Introduction 26 Many different approaches/cues Shape from stereo Shape from shading Shape from texture Shape from focus/defocus Shape from motion Shape from silhouette Etc..



 (Digiclops,")
14 Stereo Introduction 27 ( Real-Time Stereo Introduction 28 (Bumblebee, Point Grey Research Inc.) (STH-MDCS2, Videre Design) (Digiclops, Point Grey Research Inc.)


 Structure")
15 Real-Time Stereo Introduction 29 ( Structure from Motion Introduction 30





16 Photometric stereo + structured light Introduction 31 IBM s pieta project 3D Laser Scanning Introduction 32 The Digital Michelangelo Project ( ) 2 BILLION polygons, accuracy to.29mm
17 Part IV: Mid-Level Vision Introduction 33 Finding coherent structure so as to break the image or movie into big units Segmentation: qbreaking images and videos into useful pieces q E.g. finding video sequences that correspond to one shot qe.g. finding image components that are coherent in internal appearance Tracking: qkeeping track of a moving object through a long sequence of views Segmentation Introduction 34 Which image components belong together? Belong together = lie on the same object Cues similar colour similar texture not separated by contour form a suggestive shape when assembled










18 Introduction 35 Introduction 36 LOCUS (John Winn et. al. 2006)


19 Introduction 37 Introduction 38


")



20 Tracking Introduction 39 Use a model to predict next position and refine using next image Model: simple dynamic models (second order dynamics) kinematic models etc. Face tracking and eye tracking now work rather well Optical Flow Introduction 40 Where do pixels move? Translation Rotation Scaling


21 Tracking Introduction 41 Isard&Blake ECCV 96 (Condensation) More tracking examples Introduction 42
22 Part V: High Level Vision (Geometry) Introduction 43 The relations between object geometry and image geometry Model based vision qfind the position and orientation of known objects Smooth surfaces and outlines qhow the outline of a curved object is formed, and what it looks like Aspect graphs qhow the outline of a curved object moves around as you view it from different directions Range data Part VI: High Level Vision (Probabilistic) Introduction 44 Using classifiers and probability to recognize objects Templates and classifiers qhow to find objects that look the same from view to view with a classifier Relations qbreak up objects into big, simple parts, find the parts with a classifier, and then reason about the relationships between the parts to find the object. Geometric templates from spatial relations qextend this trick so that templates are formed from relations between much smaller parts
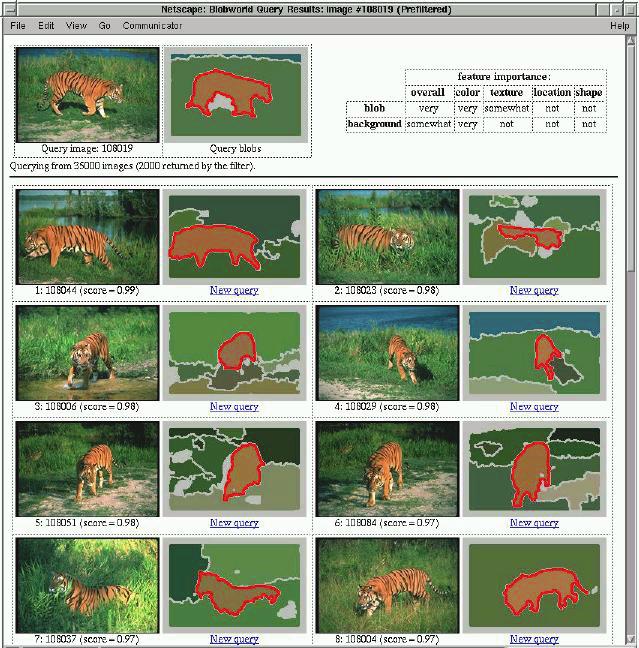
23 Part VII: Some Applications in Detail Introduction 45 Finding images in large collections searching for pictures browsing collections of pictures Image based rendering often very difficult to produce models that look like real objects qsurface weathering, etc., create details that are hard to model qsolution: make new pictures from old What are the problems in recognition? Introduction 46 Which bits of image should be recognized together? Segmentation. How can objects be recognized without focusing on detail? Abstraction. How can objects with many free parameters be recognized? No popular name, but it s a crucial problem anyhow. How do we structure very large model bases? again, no popular name; abstraction and learning come into this









24 Appearance-based recognition Introduction 47 Parametric eigenspace (Nayar et al. 96) Doesn t work in cluttered scenes Feature-based recognition Introduction 48 SIFT-based Matching, Lowe (UBC) SARG ( Stochastic Attributed Relational Graph ) Representation (SNU)












25 Recognition & segmentation Co-Recognition (SNU) Matching templates Introduction 50



 3D Object")
26 Relations between templates Introduction 51 e.g. find faces by finding eyes, nose, mouth finding assembly of the three that has the right relations om/facereco.html (Xie and Comaniciu 03) 3D Object Recognition Introduction 52 (
27 Readings for Next Class Introduction 53 Ch 1.1 Cameras and Projection Ch 4. light
Why study Computer Vision?
 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Passive 3D Photography
 SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
Introduction to Computer Vision MARCH 2018
 Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
3D Computer Vision Introduction. Guido Gerig CS 6320, Spring 2012
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
Announcements. Introduction. Why is this hard? What is Computer Vision? We all make mistakes. What do you see? Class Web Page is up:
 Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
3D Computer Vision Introduction. Guido Gerig CS 6320, Spring 2012
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
Computer Vision. I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University
 Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
Course Name: Computer Vision Course Code: IT444
 Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
CSc I6716 Spring D Computer Vision. Introduction. Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
3D Computer Vision Introduction
 3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
3D Computer Vision. Introduction. Introduction. CSc I6716 Fall Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
CSE 455: Computer Vision Winter 2007
 CSE 455: Computer Vision Winter 2007 Instructor: Professor Linda Shapiro (shapiro@cs) Additional Instructor: Dr. Matthew Brown (brown@microsoft.com) TAs: Masa Kobashi (mkbsh@cs) Peter Davis (pediddle@cs)
CSE 455: Computer Vision Winter 2007 Instructor: Professor Linda Shapiro (shapiro@cs) Additional Instructor: Dr. Matthew Brown (brown@microsoft.com) TAs: Masa Kobashi (mkbsh@cs) Peter Davis (pediddle@cs)
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
CS595:Introduction to Computer Vision
 CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
EECS 442 Computer Vision fall 2012
 EECS 442 Computer Vision fall 2012 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. GSI: Johnny Chao (ywchao125@gmail.com)
EECS 442 Computer Vision fall 2012 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. GSI: Johnny Chao (ywchao125@gmail.com)
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Web site. Introduction to Computer Vision. Computer Vision. Text Book. Computer Vision. Relation to other fields
 Introduction to Computer Vision CS / ECE 181B Tuesday, March 30, 2004 Web site http://www.ece.ucsb.edu/~manj/ece181b http://www.ece.ucsb.edu/~manj/cs181b Prof. B. S. Manjunath ECE/CS Department Last Year
Introduction to Computer Vision CS / ECE 181B Tuesday, March 30, 2004 Web site http://www.ece.ucsb.edu/~manj/ece181b http://www.ece.ucsb.edu/~manj/cs181b Prof. B. S. Manjunath ECE/CS Department Last Year
CS380: Computer Graphics Introduction. Sung-Eui Yoon ( 윤성의 ) Course URL:
 Course URL:") CS380: Computer Graphics Introduction Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg About the Instructor Joined KAIST at 2007 Main Research Focus Handle massive data for various
CS380: Computer Graphics Introduction Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg About the Instructor Joined KAIST at 2007 Main Research Focus Handle massive data for various
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Computer Vision, CS766. Staff. Instructor: Li Zhang TA: Jake Rosin
 Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
CAP 5415 Computer Vision. Fall 2011
 CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Computer Vision. Alexandra Branzan Albu Spring 2010
 Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
CSCD18: Computer Graphics. Instructor: Leonid Sigal
 CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Computer Vision Course Lecture 04. Template Matching Image Pyramids. Ceyhun Burak Akgül, PhD cba-research.com. Spring 2015 Last updated 11/03/2015
 Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Computer Graphics. Instructor: Oren Kapah. Office Hours: T.B.A.
 Computer Graphics Instructor: Oren Kapah (orenkapahbiu@gmail.com) Office Hours: T.B.A. The CG-IDC slides for this course were created by Toky & Hagit Hel-Or 1 CG-IDC 2 Exercise and Homework The exercise
Computer Graphics Instructor: Oren Kapah (orenkapahbiu@gmail.com) Office Hours: T.B.A. The CG-IDC slides for this course were created by Toky & Hagit Hel-Or 1 CG-IDC 2 Exercise and Homework The exercise
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Binocular cues to depth PSY 310 Greg Francis. Lecture 21. Depth perception
 Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
Final Exam Schedule. Final exam has been scheduled. 12:30 pm 3:00 pm, May 7. Location: INNOVA It will cover all the topics discussed in class
 Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Practice Exam Sample Solutions
 CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
Computer Graphics Introduction. Taku Komura
 Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
0. Introduction: What is Computer Graphics? 1. Basics of scan conversion (line drawing) 2. Representing 2D curves
 2. Representing 2D curves") CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
Computer Graphics Disciplines. Grading. Textbooks. Course Overview. Assignment Policies. Computer Graphics Goals I
 CSCI 480 Computer Graphics Lecture 1 Course Overview January 10, 2011 Jernej Barbic University of Southern California Administrative Issues Modeling Animation Rendering OpenGL Programming Course Information
CSCI 480 Computer Graphics Lecture 1 Course Overview January 10, 2011 Jernej Barbic University of Southern California Administrative Issues Modeling Animation Rendering OpenGL Programming Course Information
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Szymon Rusinkiewicz TA: Linjie Luo smr@cs.princeton.edu linjiel@cs.princeton.edu Course web page http://www.cs.princeton.edu/courses/archive/fall09/cos429/
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Thomas Funkhouser funk@cs.princeton.edu Preceptors: Ohad Fried, Xinyi Fan {ohad,xinyi}@cs.princeton.edu Web page: http://www.cs.princeton.edu/courses/archive/fall13/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Thomas Funkhouser funk@cs.princeton.edu Preceptors: Ohad Fried, Xinyi Fan {ohad,xinyi}@cs.princeton.edu Web page: http://www.cs.princeton.edu/courses/archive/fall13/cos429/
COMPUTER VISION. Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai
 COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
COMPUTER VISION Dr. Sukhendu Das Deptt. of Computer Science and Engg., IIT Madras, Chennai 600036. Email: sdas@iitm.ac.in URL: //www.cs.iitm.ernet.in/~sdas 1 INTRODUCTION 2 Human Vision System (HVS) Vs.
CSE 527: Intro. to Computer
 CSE 527: Intro. to Computer Vision CSE 527: Intro. to Computer Vision www.cs.sunysb.edu/~cse527 Instructor: Prof. M. Alex O. Vasilescu Email: maov@cs.sunysb.edu Phone: 631 632-8457 Office: 1421 Prerequisites:
CSE 527: Intro. to Computer Vision CSE 527: Intro. to Computer Vision www.cs.sunysb.edu/~cse527 Instructor: Prof. M. Alex O. Vasilescu Email: maov@cs.sunysb.edu Phone: 631 632-8457 Office: 1421 Prerequisites:
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Expectations. Computer Vision. Grading. Grading. Our Goal. Our Goal
 Computer Vision Expectations Me. Robert Pless pless@cse.wustl.edu 518 Lopata Hall. Office Hours: Thursday 7-8 Virtual Office Hours: Tuesday 3-4 (profpless on AIM, YahooMessenger) Class. CSE 519, Computer
Computer Vision Expectations Me. Robert Pless pless@cse.wustl.edu 518 Lopata Hall. Office Hours: Thursday 7-8 Virtual Office Hours: Tuesday 3-4 (profpless on AIM, YahooMessenger) Class. CSE 519, Computer
Computer Graphics Fundamentals. Jon Macey
 Computer Graphics Fundamentals Jon Macey jmacey@bournemouth.ac.uk http://nccastaff.bournemouth.ac.uk/jmacey/ 1 1 What is CG Fundamentals Looking at how Images (and Animations) are actually produced in
Computer Graphics Fundamentals Jon Macey jmacey@bournemouth.ac.uk http://nccastaff.bournemouth.ac.uk/jmacey/ 1 1 What is CG Fundamentals Looking at how Images (and Animations) are actually produced in
CS5620 Intro to Computer Graphics
 CS 5620 Fall 2015 www.youtube.com/watch?v=hjhic0mt4ts 3 Computer Graphics Synthesis of static/dynamic 2D images from 3D geometry using computers Teaching Staff Lecturer: Prof. Craig Gotsman Class: Mon
CS 5620 Fall 2015 www.youtube.com/watch?v=hjhic0mt4ts 3 Computer Graphics Synthesis of static/dynamic 2D images from 3D geometry using computers Teaching Staff Lecturer: Prof. Craig Gotsman Class: Mon
Computer Vision 6 Segmentation by Fitting
 Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
Computer Vision and Virtual Reality. Introduction
 Computer Vision and Virtual Reality Introduction Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: October
Computer Vision and Virtual Reality Introduction Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: October
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
Outline. Intro. Week 1, Fri Jan 4. What is CG used for? What is Computer Graphics? University of British Columbia CPSC 314 Computer Graphics Jan 2013
 University of British Columbia CPSC 314 Computer Graphics Jan 2013 Tamara Munzner Intro Outline defining computer graphics course structure course content overview Week 1, Fri Jan 4 http://www.ugrad.cs.ubc.ca/~cs314/vjan2013
University of British Columbia CPSC 314 Computer Graphics Jan 2013 Tamara Munzner Intro Outline defining computer graphics course structure course content overview Week 1, Fri Jan 4 http://www.ugrad.cs.ubc.ca/~cs314/vjan2013
Intro. Week 1, Fri Jan 4
 University of British Columbia CPSC 314 Computer Graphics Jan 2013 Tamara Munzner Intro Week 1, Fri Jan 4 http://www.ugrad.cs.ubc.ca/~cs314/vjan2013 Outline defining computer graphics course structure
University of British Columbia CPSC 314 Computer Graphics Jan 2013 Tamara Munzner Intro Week 1, Fri Jan 4 http://www.ugrad.cs.ubc.ca/~cs314/vjan2013 Outline defining computer graphics course structure
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
CPSC 425: Computer Vision
 1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Introductory Techniques For 3-D Computer Vision By Emanuele Trucco, Alessandro Verri READ ONLINE
 Introductory Techniques For 3-D Computer Vision By Emanuele Trucco, Alessandro Verri READ ONLINE AbeBooks.com: Introductory Techniques for 3-D Computer Vision (9780132611084) by Emanuele Trucco; Alessandro
Introductory Techniques For 3-D Computer Vision By Emanuele Trucco, Alessandro Verri READ ONLINE AbeBooks.com: Introductory Techniques for 3-D Computer Vision (9780132611084) by Emanuele Trucco; Alessandro
Assignment 2: Stereo and 3D Reconstruction from Disparity
 CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 6. Texture
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 6. Texture Objective Key issue: How do we represent texture? Topics: Texture analysis Texture synthesis Shape
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 6. Texture Objective Key issue: How do we represent texture? Topics: Texture analysis Texture synthesis Shape
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Model Based Object Recognition 2 Object Recognition Overview Instance recognition Recognize a known
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Model Based Object Recognition 2 Object Recognition Overview Instance recognition Recognize a known
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
P1: OTA/XYZ P2: ABC c01 JWBK288-Cyganek December 5, :11 Printer Name: Yet to Come. Part I COPYRIGHTED MATERIAL
 Part I COPYRIGHTED MATERIAL 1 Introduction The purpose of this text on stereo-based imaging is twofold: it is to give students of computer vision a thorough grounding in the image analysis and projective
Part I COPYRIGHTED MATERIAL 1 Introduction The purpose of this text on stereo-based imaging is twofold: it is to give students of computer vision a thorough grounding in the image analysis and projective
University of Cambridge Engineering Part IIB Module 4F12: Computer Vision and Robotics Handout 1: Introduction
 University of Cambridge Engineering Part IIB Module 4F12: Computer Vision and Robotics Handout 1: Introduction Roberto Cipolla October 2006 Introduction 1 What is computer vision? Vision is about discovering
University of Cambridge Engineering Part IIB Module 4F12: Computer Vision and Robotics Handout 1: Introduction Roberto Cipolla October 2006 Introduction 1 What is computer vision? Vision is about discovering
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Think-Pair-Share. What visual or physiological cues help us to perceive 3D shape and depth?
 Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Texture Image Segmentation using FCM
 Proceedings of 2012 4th International Conference on Machine Learning and Computing IPCSIT vol. 25 (2012) (2012) IACSIT Press, Singapore Texture Image Segmentation using FCM Kanchan S. Deshmukh + M.G.M
Proceedings of 2012 4th International Conference on Machine Learning and Computing IPCSIT vol. 25 (2012) (2012) IACSIT Press, Singapore Texture Image Segmentation using FCM Kanchan S. Deshmukh + M.G.M
Computer Vision. Alexandra Branzan Albu Spring 2009
 Computer Vision Alexandra Branzan Albu Spring 2009 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 315): by appointment CENG 421/ ELEC 536 : Computer
Computer Vision Alexandra Branzan Albu Spring 2009 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 315): by appointment CENG 421/ ELEC 536 : Computer
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
CS535: Interactive Computer Graphics
 CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
Image Analysis. Lars Schmidt-Thieme
 Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
Three-Dimensional Computer Vision
 \bshiaki Shirai Three-Dimensional Computer Vision With 313 Figures ' Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Table of Contents 1 Introduction 1 1.1 Three-Dimensional Computer Vision
\bshiaki Shirai Three-Dimensional Computer Vision With 313 Figures ' Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Table of Contents 1 Introduction 1 1.1 Three-Dimensional Computer Vision
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Computer Vision: Summary and Discussion
 12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
EE 264: Image Processing and Reconstruction. Image Motion Estimation I. EE 264: Image Processing and Reconstruction. Outline
 1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
COMP Preliminaries Jan. 6, 2015
 Lecture 1 Computer graphics, broadly defined, is a set of methods for using computers to create and manipulate images. There are many applications of computer graphics including entertainment (games, cinema,
Lecture 1 Computer graphics, broadly defined, is a set of methods for using computers to create and manipulate images. There are many applications of computer graphics including entertainment (games, cinema,
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
COMP 102: Computers and Computing
 COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington T V ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras