Making Machines See. Roberto Cipolla Department of Engineering. Research team
|
|
|
- Irma Wiggins
- 6 years ago
- Views:
Transcription
1 Making Machines See Roberto Cipolla Department of Engineering Research team

2 Cognitive Systems Engineering Cognitive Systems Engineering
3 Introduction Making machines see Vision: What, Why and How? 3Rs of computer vision: Reconstruction Registration Recognition
4 Registration? Target detection and pose estimation

5 Registration

6 Registration
7 Registration
8 Reconstruction? Recovery of 3D shape from images
9 Reconstruction
10 3D models
11 Recognition?

12 road Recognition image classification categorical object detection horses airplanes background semantic segmentation tree bicycle building grass dog car sky building road


13 Pedestrian detection
14 Introduction Existing applications Traditional research in Computer vision developed for: Visual inspection Medical imaging Remote sensing Surveillance and biometrics Target detection and tracking
15 Introduction New applications Computer vision has now found a place in consumer products Mobile phones and PDAs Games Cars Image and video search Internet and shopping


16 Smart erase on a mobile phone Introduction
17 How to make machines that see?

18 Why not study biology?

19 Perspective


20 Transformations
21 Shape













22 Machine Learning?
23 Machine Learning
24 I. Reconstruction: Recovery of accurate 3D shape from uncalibrated images Cipolla and Blake 1992 Cipolla and Giblin 1999 Mendonca, Wong and Cipolla Vogiatzis, Hernandez and Cipolla






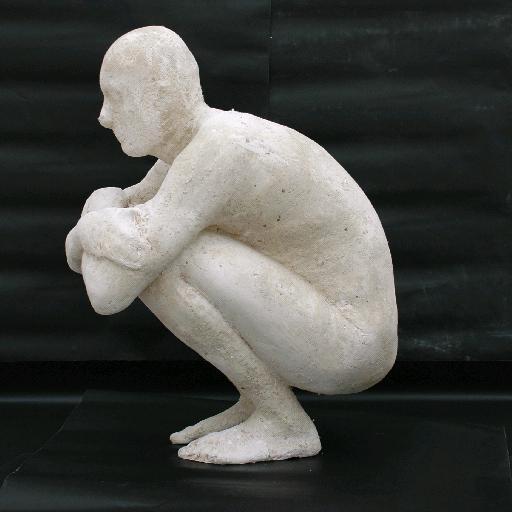
25 Digital Pygmalion Project


26 Digital Pygmalion the myth



27 Scanning technologies Laser range finders Very accurate Very expensive Complicated to use Minolta Michelangelo project MENSI 3D Scanner

28 3D models We need a way to get them that is practical fast non-intrusive low cost
29 Stereo vision 3D point

30 Automatic 3d modeller Camera motion Segmentation of object outline Multi-view volumetric stereo 3D segmentation input images silhouettes visual hull 3D model
31 From images to model capture images of object on top of a coloured sheet



")
32 From images to model calibrate cameras (i.e. estimate position, pose and focal length of camera in each photo) using pattern on sheet



33 From images to model identify object of interest by using fixation constraint and simultaneous 3D segmentation

34 From images to model construct visuall hull (largest object that can fit inside silhouettes)
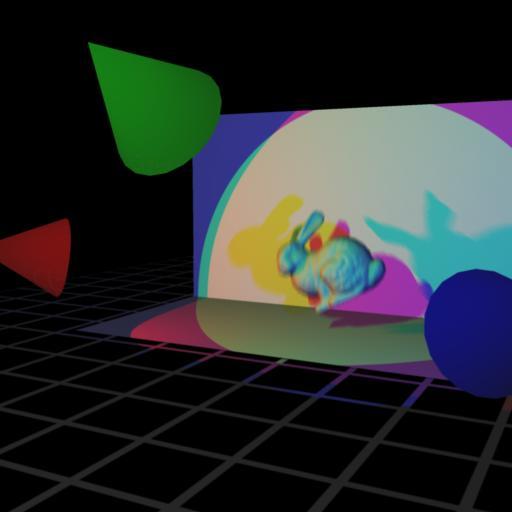
35 Photo-consistency Non-photo-consistent point
36 Photo-consistency Photo-consistent point





37 Finding the surface
38 3D segmentation



39 3D Models
40 Gormley - input Images



41 Recovery of camera motion Input images Feature extraction Feature matching Bundle adjustment

42 Probabilistic 3D segmentation







43 3D Models

44 Final installation




45 3D models
46 Multiview photometric stereo Vogiatzis, Hernandez and Cipolla 2006 and 2008
47 Untextured objects Almost impossible to establish correspondence Use shading cue
48 Untextured objects Changing lighting uncovers fine geometric detail Assumptions: Single, distant light-source Silhouettes can be extracted No texture, single colour






49 Image acquisition setup

50 Surface Evolution of 3D Mesh Evolve mesh until it is predicted appearance under recovered illumination matches images









51 3D Models

52 Making physical copies Real Replica



53 3D Models


54 3D Models

55 3D Models



56 3D Models



57 3D Models
58 Deformable objects: Real-time photometric stereo using colour lighting Hernandez et al 2007

59 Photometric stereo with colour


60 Deformable objects? a method for reconstructing a textureless deforming object in 2.5d setup calibration pattern

61 Shape from colour observation: 1-1 mapping between colour and surface orientation get map of surface orientations from colour image integrate orientations to get depth map do this for colour video to get 2.5d reconstruction of deforming object!

62 Photometric stereo with colour

63 shape from colour
64 II. Registration: Target detection and pose estimation
65 Image matching
66 Registration: Where am I? What am I looking at? Johansson and Cipolla 2002 Robertson and Cipolla 2004 Cipolla et al 2004

67 Where I am? Determine pose from single image by matching

68 Register database view
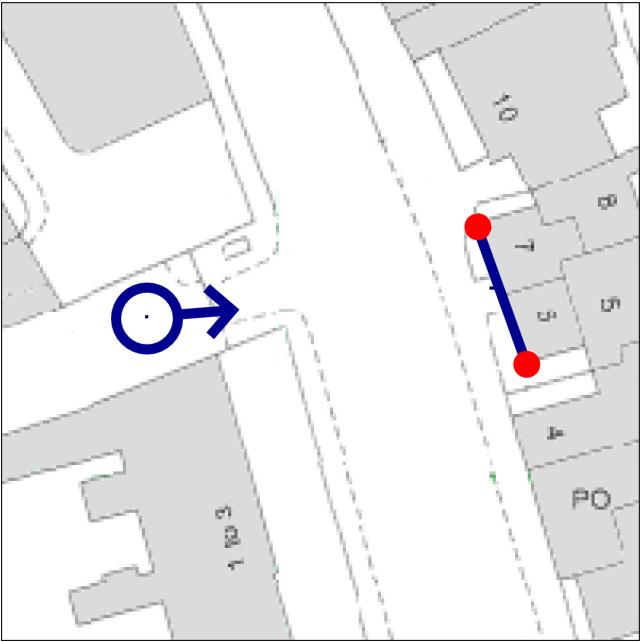



69 Localisation of query view


70 Image-based localisation


71 Image-based localisation


72 Image-based localisation
73 Registration: Ageing infrastructure inspection


74 Registration with concrete Can appear very repetitive to the eye However, plenty of distinguished features can be extracted Very accurate matching is possible

75 Registration with concrete
76 Finding 2D shapes and applications to HCI Stenger, Thayananthan, Torr and Cipolla 2003 Williams, Blake and Cipolla 2003 and 2006 Ramanan, Fitzgibbon and Cipolla



77 Matching shape templates Oriented Oriented Canny Distance Edge Transform Detector
78 Matching shape templates Oriented Chamfer Matching


79 Hand detection system

80 Tracking - 3D mouse

81 Real-time visual controller for Dasher

82 People and pose detection
83 People and pose detection
84 III. Object recognition and machine learning Shotton, Blake and Cipolla Kim, Kittler and Cipolla 2006 Wong and Cipolla 2007
85 road Overview image classification categorical object detection horses airplanes background semantic segmentation tree bicycle building grass dog car sky building road
86 Using interest points and visual words Johnson and Cipolla


87 Image matching
88 Using contour and shape Shotton, Blake and Cipolla



89 Cognitive Systems Engineering Learning and Adaptability : : } : :

90 Object Model F σ p c F = (T, p,,,, a, b)

91 Segmented Unsegmented Shape Exemplar Centroid votes Exemplar Sub-cluster members Centroid votes

























92




































93


































94

95 Recognition in video
96 Making machines see What is vision and how to duplicate it? 3D shape: making digital copies of sculpture from photographs from multiple viewpoints Recognition of a painting/picture from a single photo using a mobile (camera) phone Detection of objects: hands, faces and people and use in novel man-machine interfaces
97 Summary Image registration and matching 3D shape from uncalibrated images. Object detection and tracking
Computer Vision at Cambridge: Reconstruction,Registration and Recognition
 Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering
Computer Vision at Cambridge: Reconstruction,Registration and Recognition Roberto Cipolla Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Multi-view photometric stereo
 1 Multi-view photometric stereo Carlos Hernández, George Vogiatzis, Roberto Cipolla 2 Abstract This paper addresses the problem of obtaining complete, detailed reconstructions of textureless shiny objects.
1 Multi-view photometric stereo Carlos Hernández, George Vogiatzis, Roberto Cipolla 2 Abstract This paper addresses the problem of obtaining complete, detailed reconstructions of textureless shiny objects.
Multiview Photometric Stereo
 548 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 3, MARCH 2008 Multiview Photometric Stereo Carlos Hernández, Member, IEEE, George Vogiatzis, Member, IEEE, and Roberto Cipolla,
548 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 30, NO. 3, MARCH 2008 Multiview Photometric Stereo Carlos Hernández, Member, IEEE, George Vogiatzis, Member, IEEE, and Roberto Cipolla,
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Why study Computer Vision?
 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements. Introduction. Why is this hard? What is Computer Vision? We all make mistakes. What do you see? Class Web Page is up:
 Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation
 Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
Mixed-Reality for Intuitive Photo-Realistic 3D-Model Generation Wolfgang Sepp, Tim Bodenmueller, Michael Suppa, and Gerd Hirzinger DLR, Institut für Robotik und Mechatronik @ GI-Workshop VR/AR 2009 Folie
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Graphics, Vision, HCI. K.P. Chan Wenping Wang Li-Yi Wei Kenneth Wong Yizhou Yu
 Graphics, Vision, HCI K.P. Chan Wenping Wang Li-Yi Wei Kenneth Wong Yizhou Yu Li-Yi Wei Background Stanford (95-01), NVIDIA (01-05), MSR (05-11) Research Nominal: Graphics, HCI, parallelism Actual: Computing
Graphics, Vision, HCI K.P. Chan Wenping Wang Li-Yi Wei Kenneth Wong Yizhou Yu Li-Yi Wei Background Stanford (95-01), NVIDIA (01-05), MSR (05-11) Research Nominal: Graphics, HCI, parallelism Actual: Computing
Vision-Based Technologies for Security in Logistics. Alberto Isasi
 Vision-Based Technologies for Security in Logistics Alberto Isasi aisasi@robotiker.es INFOTECH is the Unit of ROBOTIKER-TECNALIA specialised in Research, Development and Application of Information and
Vision-Based Technologies for Security in Logistics Alberto Isasi aisasi@robotiker.es INFOTECH is the Unit of ROBOTIKER-TECNALIA specialised in Research, Development and Application of Information and
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011
 Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 Auto-initialize a tracking algorithm & recover from failures All human poses,
Jamie Shotton, Andrew Fitzgibbon, Mat Cook, Toby Sharp, Mark Finocchio, Richard Moore, Alex Kipman, Andrew Blake CVPR 2011 Auto-initialize a tracking algorithm & recover from failures All human poses,
Polygonal Meshes. Thomas Funkhouser Princeton University COS 526, Fall 2016
 Polygonal Meshes Thomas Funkhouser Princeton University COS 526, Fall 2016 Digital Geometry Processing Processing of 3D surfaces Creation, acquisition Storage, transmission Editing, animation, simulation
Polygonal Meshes Thomas Funkhouser Princeton University COS 526, Fall 2016 Digital Geometry Processing Processing of 3D surfaces Creation, acquisition Storage, transmission Editing, animation, simulation
Silhouette Coherence for Camera Calibration under Circular Motion
 1 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Abstract We present a new approach to camera calibration as a part of a complete
1 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Abstract We present a new approach to camera calibration as a part of a complete
Silhouette Coherence for Camera Calibration under Circular Motion
 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Practical 3d reconstruction based on Photometric Stereo
 Practical 3d reconstruction based on Photometric Stereo George Vogiatzis and Carlos Hernández Abstract Photometric Stereo is a powerful image based 3d reconstruction technique that has recently been used
Practical 3d reconstruction based on Photometric Stereo George Vogiatzis and Carlos Hernández Abstract Photometric Stereo is a powerful image based 3d reconstruction technique that has recently been used
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Silhouette Coherence for Camera Calibration under Circular Motion
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 2, FEBRUARY 2007 343 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Member, IEEE, Francis
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 2, FEBRUARY 2007 343 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Member, IEEE, Francis
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
University of Cambridge Engineering Part IIB Module 4F12: Computer Vision and Robotics Handout 1: Introduction
 University of Cambridge Engineering Part IIB Module 4F12: Computer Vision and Robotics Handout 1: Introduction Roberto Cipolla October 2006 Introduction 1 What is computer vision? Vision is about discovering
University of Cambridge Engineering Part IIB Module 4F12: Computer Vision and Robotics Handout 1: Introduction Roberto Cipolla October 2006 Introduction 1 What is computer vision? Vision is about discovering
EE290T : 3D Reconstruction and Recognition
 EE290T : 3D Reconstruction and Recognition Acknowledgement Courtesy of Prof. Silvio Savarese. Introduction There was a table set out under a tree in front of the house, and the March Hare and the Hatter
EE290T : 3D Reconstruction and Recognition Acknowledgement Courtesy of Prof. Silvio Savarese. Introduction There was a table set out under a tree in front of the house, and the March Hare and the Hatter
Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model
 Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model Shohei Nobuhara Takashi Matsuyama Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501, Japan {nob, tm}@vision.kuee.kyoto-u.ac.jp
Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model Shohei Nobuhara Takashi Matsuyama Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501, Japan {nob, tm}@vision.kuee.kyoto-u.ac.jp
CAP 5415 Computer Vision. Fall 2011
 CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Waleed Pervaiz CSE 352
 Waleed Pervaiz CSE 352 Computer Vision is the technology that enables machines to see and obtain information from digital images. It is seen as an integral part of AI in fields such as pattern recognition
Waleed Pervaiz CSE 352 Computer Vision is the technology that enables machines to see and obtain information from digital images. It is seen as an integral part of AI in fields such as pattern recognition
Introduction to Computer Vision. Srikumar Ramalingam School of Computing University of Utah
 Introduction to Computer Vision Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Course Website http://www.eng.utah.edu/~cs6320/ What is computer vision? Light source 3D
Introduction to Computer Vision Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Course Website http://www.eng.utah.edu/~cs6320/ What is computer vision? Light source 3D
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Block Diagram. Physical World. Image Acquisition. Enhancement and Restoration. Segmentation. Feature Selection/Extraction.
 Block Diagram Physical World Image Acquisition Imaging Image Sampling, Quantization, Compression Image Processing Enhancement and Restoration Segmentation Image Analysis Feature Selection/Extraction Image
Block Diagram Physical World Image Acquisition Imaging Image Sampling, Quantization, Compression Image Processing Enhancement and Restoration Segmentation Image Analysis Feature Selection/Extraction Image
The Analysis of Animate Object Motion using Neural Networks and Snakes
 The Analysis of Animate Object Motion using Neural Networks and Snakes Ken Tabb, Neil Davey, Rod Adams & Stella George e-mail {K.J.Tabb, N.Davey, R.G.Adams, S.J.George}@herts.ac.uk http://www.health.herts.ac.uk/ken/vision/
The Analysis of Animate Object Motion using Neural Networks and Snakes Ken Tabb, Neil Davey, Rod Adams & Stella George e-mail {K.J.Tabb, N.Davey, R.G.Adams, S.J.George}@herts.ac.uk http://www.health.herts.ac.uk/ken/vision/
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Simple 3D Reconstruction of Single Indoor Image with Perspe
 Simple 3D Reconstruction of Single Indoor Image with Perspective Cues Jingyuan Huang Bill Cowan University of Waterloo May 26, 2009 1 Introduction 2 Our Method 3 Results and Conclusions Problem Statement
Simple 3D Reconstruction of Single Indoor Image with Perspective Cues Jingyuan Huang Bill Cowan University of Waterloo May 26, 2009 1 Introduction 2 Our Method 3 Results and Conclusions Problem Statement
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
The Analysis of Animate Object Motion using Neural Networks and Snakes
 The Analysis of Animate Object Motion using Neural Networks and Snakes Ken Tabb, Neil Davey, Rod Adams & Stella George e-mail {K.J.Tabb, N.Davey, R.G.Adams, S.J.George}@herts.ac.uk http://www.health.herts.ac.uk/ken/vision/
The Analysis of Animate Object Motion using Neural Networks and Snakes Ken Tabb, Neil Davey, Rod Adams & Stella George e-mail {K.J.Tabb, N.Davey, R.G.Adams, S.J.George}@herts.ac.uk http://www.health.herts.ac.uk/ken/vision/
COMP 102: Computers and Computing
 COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
Multi-View 3D Reconstruction of Highly-Specular Objects
 Multi-View 3D Reconstruction of Highly-Specular Objects Master Thesis Author: Aljoša Ošep Mentor: Michael Weinmann Motivation Goal: faithful reconstruction of full 3D shape of an object Current techniques:
Multi-View 3D Reconstruction of Highly-Specular Objects Master Thesis Author: Aljoša Ošep Mentor: Michael Weinmann Motivation Goal: faithful reconstruction of full 3D shape of an object Current techniques:
Geometric Registration for Deformable Shapes 1.1 Introduction
 Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors
 Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors Keith Forbes 1 Anthon Voigt 2 Ndimi Bodika 2 1 Digital Image Processing Group 2 Automation and Informatics Group Department of Electrical
Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors Keith Forbes 1 Anthon Voigt 2 Ndimi Bodika 2 1 Digital Image Processing Group 2 Automation and Informatics Group Department of Electrical
3D Computer Vision Introduction
 3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
Chapter 12 3D Localisation and High-Level Processing
 Chapter 12 3D Localisation and High-Level Processing This chapter describes how the results obtained from the moving object tracking phase are used for estimating the 3D location of objects, based on the
Chapter 12 3D Localisation and High-Level Processing This chapter describes how the results obtained from the moving object tracking phase are used for estimating the 3D location of objects, based on the
What is computer vision?
 What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
What is computer vision? Computer vision (image understanding) is a discipline that studies how to reconstruct, interpret and understand a 3D scene from its 2D images in terms of the properties of the
Announcements. Recognition (Part 3) Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test
 Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test") Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Think-Pair-Share. What visual or physiological cues help us to perceive 3D shape and depth?
 Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Gaze interaction (2): models and technologies
: models and technologies") Gaze interaction (2): models and technologies Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@dsi.unimi.it http://homes.dsi.unimi.it/~boccignone/l
Gaze interaction (2): models and technologies Corso di Interazione uomo-macchina II Prof. Giuseppe Boccignone Dipartimento di Scienze dell Informazione Università di Milano boccignone@dsi.unimi.it http://homes.dsi.unimi.it/~boccignone/l
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images
 Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images Seong-Jae Lim, Ho-Won Kim, Jin Sung Choi CG Team, Contents Division ETRI Daejeon, South Korea sjlim@etri.re.kr Bon-Ki
Automatic Generation of Animatable 3D Personalized Model Based on Multi-view Images Seong-Jae Lim, Ho-Won Kim, Jin Sung Choi CG Team, Contents Division ETRI Daejeon, South Korea sjlim@etri.re.kr Bon-Ki
Recognition (Part 4) Introduction to Computer Vision CSE 152 Lecture 17
 Introduction to Computer Vision CSE 152 Lecture 17") Recognition (Part 4) CSE 152 Lecture 17 Announcements Homework 5 is due June 9, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images
Recognition (Part 4) CSE 152 Lecture 17 Announcements Homework 5 is due June 9, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images
High Quality Photometric Reconstruction using a Depth Camera
 High Quality Photometric Reconstruction using a Depth Camera Sk. Mohammadul Haque, Avishek Chatterjee, Venu Madhav Govindu Indian Institute of Science Bangalore - 560012, India smhaque avishek venu@ee.iisc.ernet.in
High Quality Photometric Reconstruction using a Depth Camera Sk. Mohammadul Haque, Avishek Chatterjee, Venu Madhav Govindu Indian Institute of Science Bangalore - 560012, India smhaque avishek venu@ee.iisc.ernet.in
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Snakes, level sets and graphcuts. (Deformable models)
") INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
Hand Gesture Recognition. By Jonathan Pritchard
 Hand Gesture Recognition By Jonathan Pritchard Outline Motivation Methods o Kinematic Models o Feature Extraction Implemented Algorithm Results Motivation Virtual Reality Manipulation of virtual objects
Hand Gesture Recognition By Jonathan Pritchard Outline Motivation Methods o Kinematic Models o Feature Extraction Implemented Algorithm Results Motivation Virtual Reality Manipulation of virtual objects
3D Digitization of a Hand-held Object with a Wearable Vision Sensor
 3D Digitization of a Hand-held Object with a Wearable Vision Sensor Sotaro TSUKIZAWA, Kazuhiko SUMI, and Takashi MATSUYAMA tsucky@vision.kuee.kyoto-u.ac.jp sumi@vision.kuee.kyoto-u.ac.jp tm@i.kyoto-u.ac.jp
3D Digitization of a Hand-held Object with a Wearable Vision Sensor Sotaro TSUKIZAWA, Kazuhiko SUMI, and Takashi MATSUYAMA tsucky@vision.kuee.kyoto-u.ac.jp sumi@vision.kuee.kyoto-u.ac.jp tm@i.kyoto-u.ac.jp
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen?
 Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Neue Verfahren der Bildverarbeitung auch zur Erfassung von Schäden in Abwasserkanälen? Fraunhofer HHI 13.07.2017 1 Fraunhofer-Gesellschaft Fraunhofer is Europe s largest organization for applied research.
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles
 A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles Carlo Colombo, Dario Comanducci, and Alberto Del Bimbo Dipartimento di Sistemi ed Informatica Via S. Marta 3, I-5139
A Desktop 3D Scanner Exploiting Rotation and Visual Rectification of Laser Profiles Carlo Colombo, Dario Comanducci, and Alberto Del Bimbo Dipartimento di Sistemi ed Informatica Via S. Marta 3, I-5139
Large-Scale 3D Point Cloud Processing Tutorial 2013
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
P1: OTA/XYZ P2: ABC c01 JWBK288-Cyganek December 5, :11 Printer Name: Yet to Come. Part I COPYRIGHTED MATERIAL
 Part I COPYRIGHTED MATERIAL 1 Introduction The purpose of this text on stereo-based imaging is twofold: it is to give students of computer vision a thorough grounding in the image analysis and projective
Part I COPYRIGHTED MATERIAL 1 Introduction The purpose of this text on stereo-based imaging is twofold: it is to give students of computer vision a thorough grounding in the image analysis and projective
A New Representation for Video Inspection. Fabio Viola
 A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Lecture 01 Introduction http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Computer Vision
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Lecture 01 Introduction http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Computer Vision
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Learning Class-specific Edges for Object Detection and Segmentation
 Learning Class-specific Edges for Object Detection and Segmentation Mukta Prasad 1, Andrew Zisserman 1, Andrew Fitzgibbon 2, M. Pawan Kumar 3 and P. H. S. Torr 3 http://www.robots.ox.ac.uk/ {mukta,vgg}
Learning Class-specific Edges for Object Detection and Segmentation Mukta Prasad 1, Andrew Zisserman 1, Andrew Fitzgibbon 2, M. Pawan Kumar 3 and P. H. S. Torr 3 http://www.robots.ox.ac.uk/ {mukta,vgg}
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Computer Vision eine Herausforderung in der Künstlichen Intelligenz
 Computer Vision eine Herausforderung in der Künstlichen Intelligenz Prof. Carsten Rother Computer Vision Lab Dresden Institute of Artificial Intelligence 11/12/2013 Computer Vision a hard case for AI Roadmap
Computer Vision eine Herausforderung in der Künstlichen Intelligenz Prof. Carsten Rother Computer Vision Lab Dresden Institute of Artificial Intelligence 11/12/2013 Computer Vision a hard case for AI Roadmap
Probabilistic visibility for multi-view stereo
 Probabilistic visibility for multi-view stereo Carlos Hernández 1 Computer Vision Group Toshiba Research Europe George Vogiatzis 2 Computer Vision Group Toshiba Research Europe Roberto Cipolla 3 Dept.
Probabilistic visibility for multi-view stereo Carlos Hernández 1 Computer Vision Group Toshiba Research Europe George Vogiatzis 2 Computer Vision Group Toshiba Research Europe Roberto Cipolla 3 Dept.
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Multiview Photogrammetry 3D Virtual Geology for everyone
 Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Multiview Photogrammetry 3D Virtual Geology for everyone A short course Marko Vrabec University of Ljubljana, Department of Geology FIRST: some background info Precarious structural measurements of fractures
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
CSc I6716 Spring D Computer Vision. Introduction. Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
CSE 455: Computer Vision Winter 2007
 CSE 455: Computer Vision Winter 2007 Instructor: Professor Linda Shapiro (shapiro@cs) Additional Instructor: Dr. Matthew Brown (brown@microsoft.com) TAs: Masa Kobashi (mkbsh@cs) Peter Davis (pediddle@cs)
CSE 455: Computer Vision Winter 2007 Instructor: Professor Linda Shapiro (shapiro@cs) Additional Instructor: Dr. Matthew Brown (brown@microsoft.com) TAs: Masa Kobashi (mkbsh@cs) Peter Davis (pediddle@cs)
Department of Computer Engineering, Middle East Technical University, Ankara, Turkey, TR-06531
 INEXPENSIVE AND ROBUST 3D MODEL ACQUISITION SYSTEM FOR THREE-DIMENSIONAL MODELING OF SMALL ARTIFACTS Ulaş Yılmaz, Oğuz Özün, Burçak Otlu, Adem Mulayim, Volkan Atalay {ulas, oguz, burcak, adem, volkan}@ceng.metu.edu.tr
INEXPENSIVE AND ROBUST 3D MODEL ACQUISITION SYSTEM FOR THREE-DIMENSIONAL MODELING OF SMALL ARTIFACTS Ulaş Yılmaz, Oğuz Özün, Burçak Otlu, Adem Mulayim, Volkan Atalay {ulas, oguz, burcak, adem, volkan}@ceng.metu.edu.tr