Robots parallèles à câbles
|
|
|
- Denis Wilson
- 5 years ago
- Views:
Transcription



1 Robots parallèles à câbles Marc Gouttefarde LIRMM CNRS / Université de Montpellier Séminaire Technique : Robotique industrielle LIRMM, 24 novembre 2016
2 CABLE-DRIVEN PARALLEL ROBOTS Base frame Winches Cables Mobile platform R. Verhoeven (SEGESTA, Duisburg University)
 : the platform is fully constrained by the")
3 FULLY CONSTRAINED PARALLEL CABLE ROBOTS When the cables properly surround the mobile platform Any wrench applied to the mobile platform can be balanced by the cables (only pulling on the platform) : the platform is fully constrained by the cables


4 CABLE-SUSPENDED PARALLEL ROBOTS When the cable drawing points are all located above the platform g mg Not fully constrained f Slack cables


")
5 SOME POSSIBLE APPLICATIONS FULLY-CONSTRAINED ROBOTS Light weight: High Speed manipulation Ultra High-Speed Robot FALCON Kawamura et al., 1995 Max.: 43G, 13m/s DeltaBOT ( hybrid ) Khajepour et al., cycles per minute


6 SOME POSSIBLE APPLICATIONS FULLY-CONSTRAINED ROBOTS Light weight and compact: Space applications Thompson et al., 1996 McDonnell-Douglas Charlotte Robot Campbell et al., 1995
: Wind tunnel SACSO (Lafourcade, Llibre, Reboulet, 2002) Suspension active pour")
7 SOME APPLICATIONS - FULLY CONSTRAINED ROBOTS Cables or wires are discreet (non intrusive): Wind tunnel SACSO (Lafourcade, Llibre, Reboulet, 2002) Suspension active pour soufflerie
: Haptic interfaces")

8 SOME APPLICATIONS - FULLY CONSTRAINED ROBOTS Cables or wires are discreet (non intrusive): Haptic interfaces SPIDAR (Ishii and Sato, 1994) Virtual Sport Machine (Kawamura et al., 1993) Texas 9-string (Linemann and Tesar, 1989)

: Haptic interfaces")


9 SOME APPLICATIONS - FULLY CONSTRAINED ROBOTS Cables or wires are discreet (non intrusive): Haptic interfaces Takeda et al., 2000 Rowing simulator (von Zitzewitz, 2009) WiRo 6-3 (Ferraresi et al., 2004) Medical application (Abdelaziz, 2011)
: Haptic interfaces INCA 6D,")
10 SOME APPLICATIONS - FULLY CONSTRAINED ROBOTS Cables or wires are discreet (non intrusive): Haptic interfaces INCA 6D, Haption SA
")
11 SOME APPLICATIONS - FULLY CONSTRAINED ROBOTS high dynamics, large rotations MPI Simulator (Germany)

 Integration on a building facade (Izard et")
12 SOME APPLICATIONS - FULLY CONSTRAINED ROBOTS Very large workspace Means of avoiding cable collisions Contour crafting system (Williams et al., 2008) Integration on a building facade (Izard et al., 2012)

13 SOME POSSIBLE APPLICATIONS CABLE-SUSPENDED ROBOTS Huge workspace Skycam No cable cluttering the workspace below the platform

 NIST ROBOCRANE (Albus et al.")
14 SOME POSSIBLE APPLICATIONS CABLE-SUSPENDED ROBOTS Huge workspace and heavy payloads Aircraft painting and stripping PaR Systems (USA) NIST ROBOCRANE (Albus et al.), 1980s 1990s


 -")
")
15 SOME POSSIBLE APPLICATIONS CABLE-SUSPENDED ROBOTS Giant Telescopes Chinese project FAST Rescue Systems LAR (Large Adpative Reflector) - Canada Portable rescue system (Tadokoro, 1999) Rescue crane (Merlet, 2010)



16 A REDUNDANTLY ACTUATED CABLE-SUSPENDED PARALLEL ROBOT Dimensions: 15 m x 11 m x 6 m (L x l x h) Payload capacity: up to 500 kg Large workspace to footprint ratio The cable-driven parallel robot of the CoGiRo ANR project (LIRMM/Tecnalia)



17 WELL-KNOWN ART Most components of a cable-driven parallel robot: standard modeling and design Mobile platform: a rigid body Deflection units Winches



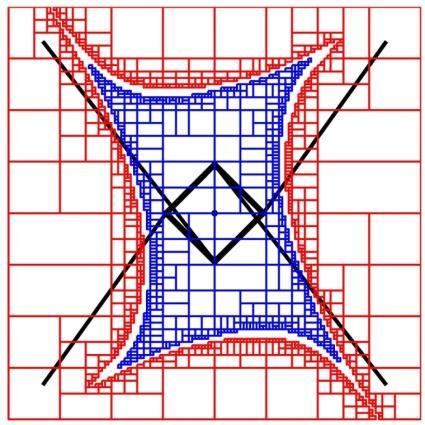
18 SOME ISSUES: WRENCH FEASIBLE WORKSPACE DETERMINATION Discretization Determination of the boundaries By means of interval analysis
19 SOME ISSUES: GEOMETRY SELECTION m = # cables Cable exit points Cable attachment points Geometry design space dimension (spatial robot): 3 x m + 3 x m = 6 x m (e.g. for m = 8, dimension = 48) A very wide space Geometry of a cable-driven parallel robot: + Geometry of the mobile platform (cable attachment points) + Geometry of the base frame (cable exit points) + Arrangement of cables between base and platform
20 SOME ISSUES: GEOMETRY SELECTION Global view on geometry selection: A tradeoff, e.g., between cable collision avoidance and large wrench-feasible workspace (which typically requires crossed cable layouts) Best planar 3-DOF 4-cable fully constrained robot Locomotion interface (Perreault et al., 2009)
21 SOME ISSUES: GEOMETRY SELECTION Play a fundamental role for the cable robot overall performances
22 SOME ISSUES: MODELING HEFTY AND/OR ELASTIC CABLES Inverse kinematics Massless elastic cables: l 0i = l i - Δl i o strained length l i given by distance between cable exit and attachment points o elongation Δl i generally considered as being determined by Hooke s law and thus requires the cable tension Cables with non-negligible mass: non-linear system of equations involving kinematics and statics Direct kinematics: non-linear system of equations involving kinematics and statics Complex dynamics
23 PLANNING AND CONTROL Do not ask the cables to push on the mobile platform: tension distribution May have to deal with: very large workspace heavy weights elasticity and sagging possible vibrations redundancy cable collisions transparency A lot of things to say
24 CONCLUSIONS Cable-driven parallel robots a distinctive characteristic: scalability a distinctive issue: cables can only pull on the mobile platform Some useful properties thin cables or wires are discreet and may not be dangerous (relative) light weight of mobile parts portability, modularity, reconfigurability large workspace and heavy payload capabilities A number of issues Force transmission, stiffness, stability, workspace analysis Accuracy Safety
Inverse Kinematics of Cable Driven Parallel Robot.
 ISSN: 4-1 May 01 IJSDR Volume 1, Issue Inverse Kinematics of Cable Driven Parallel Robot. 1 Shail P. Maniyar, Arya B. Changela 1 P.G.Scholar, Assistant Professor Mechanical Engineering Department, Marwadi
ISSN: 4-1 May 01 IJSDR Volume 1, Issue Inverse Kinematics of Cable Driven Parallel Robot. 1 Shail P. Maniyar, Arya B. Changela 1 P.G.Scholar, Assistant Professor Mechanical Engineering Department, Marwadi
DETERMINATION OF THE WRENCH-CLOSURE WORKSPACE OF 6-DOF PARALLEL CABLE-DRIVEN MECHANISMS
 DETERMINATION OF THE WRENCH-CLOSURE WORKSPACE OF 6-DOF PARALLEL CABLE-DRIVEN MECHANISMS M. Gouttefarde, J-P. Merlet and D. Daney INRIA Sophia-Antipolis, France Marc.Gouttefarde@sophia.inria.fr Jean-Pierre.Merlet@sophia.inria.fr
DETERMINATION OF THE WRENCH-CLOSURE WORKSPACE OF 6-DOF PARALLEL CABLE-DRIVEN MECHANISMS M. Gouttefarde, J-P. Merlet and D. Daney INRIA Sophia-Antipolis, France Marc.Gouttefarde@sophia.inria.fr Jean-Pierre.Merlet@sophia.inria.fr
Unsolved Issues in Kinematics and Redundancy of Wire-driven Parallel Robots
 p. 1/ Unsolved Issues in Kinematics and Redundancy of Wire-driven Parallel Robots J-P. Merlet COPRIN project-team INRIA Sophia-Antipolis France 1/8 p. 2/ Introduction 2/8 p. 2/ Introduction Focus: robot
p. 1/ Unsolved Issues in Kinematics and Redundancy of Wire-driven Parallel Robots J-P. Merlet COPRIN project-team INRIA Sophia-Antipolis France 1/8 p. 2/ Introduction 2/8 p. 2/ Introduction Focus: robot
FINAL REPORT. Project title: Parallel Cable Robotics for Improving Maintenance and Logistics of Large- Scale Products
 FINAL REPORT Grant Agreement number: NMP2-SL-2011-285404 Project acronym: CABLEBOT Project title: Parallel Cable Robotics for Improving Maintenance and Logistics of Large- Scale Products Funding Scheme:
FINAL REPORT Grant Agreement number: NMP2-SL-2011-285404 Project acronym: CABLEBOT Project title: Parallel Cable Robotics for Improving Maintenance and Logistics of Large- Scale Products Funding Scheme:
Design of a Parallel Wire-Driven Manipulator for Wind Tunnels
 Proceedings of the WORKSHOP on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators October 3 4,, Quebec City, Quebec, Canada Clément M. Gosselin and Imme Ebert-Uphoff,
Proceedings of the WORKSHOP on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators October 3 4,, Quebec City, Quebec, Canada Clément M. Gosselin and Imme Ebert-Uphoff,
Design and Modeling of Cabledriven Parallel Robots: State of the Art and Open Issues
 Design and Modeling of Cabledriven Parallel Robots: State of the Art and Open Issues Original presentation by Stéphane CARO 1 Summary 1. Introduction 2. Open Problems 1. Direct Geometrico-Static Problem
Design and Modeling of Cabledriven Parallel Robots: State of the Art and Open Issues Original presentation by Stéphane CARO 1 Summary 1. Introduction 2. Open Problems 1. Direct Geometrico-Static Problem
CONTOUR-CRAFTING-CARTESIAN-CABLE ROBOT SYSTEM CONCEPTS: WORKSPACE AND STIFFNESS COMPARISONS
 IDETC/CIE 2008 ASME 2008 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference August 3-6, 2008, New York, NY, USA DETC2008-49478 CONTOUR-CRAFTING-CARTESIAN-CABLE
IDETC/CIE 2008 ASME 2008 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference August 3-6, 2008, New York, NY, USA DETC2008-49478 CONTOUR-CRAFTING-CARTESIAN-CABLE
CABLE-SUSPENDED ROBOTIC CONTOUR CRAFTING SYSTEM
 Proceedings of IDETC/CIE 2006 ASME 2006 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference September 10-13, 2006, Philadelphia, Pennsylvania,
Proceedings of IDETC/CIE 2006 ASME 2006 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference September 10-13, 2006, Philadelphia, Pennsylvania,
MODELING AND CONTROL CABLE-DRIVEN ROBOTS
 MODELING AND CONTROL OF CABLE-DRIVEN ROBOTS Seyed Masood Dehghan Banadaki NANYANG TECHNOLOGICAL UNIVERSITY 2007 MODELING AND CONTROL OF CABLE-DRIVEN ROBOTS Seyed Masood Dehghan Banadaki A THESIS SUBMITTED
MODELING AND CONTROL OF CABLE-DRIVEN ROBOTS Seyed Masood Dehghan Banadaki NANYANG TECHNOLOGICAL UNIVERSITY 2007 MODELING AND CONTROL OF CABLE-DRIVEN ROBOTS Seyed Masood Dehghan Banadaki A THESIS SUBMITTED
A Reconfigurable Cable-Driven Parallel Robot for Sandblasting and Painting of Large Structures
 A Reconfigurable Cable-Driven Parallel Robot for Sandblasting and Painting of Large Structures Lorenzo Gagliardini, Stéphane Caro, Marc Gouttefarde, Philippe Wenger and Alexis Girin Abstract The research
A Reconfigurable Cable-Driven Parallel Robot for Sandblasting and Painting of Large Structures Lorenzo Gagliardini, Stéphane Caro, Marc Gouttefarde, Philippe Wenger and Alexis Girin Abstract The research
Modelling and Analysis of Anthropomorphic Cable-Driven Robots
 Modelling and Analysis of Anthropomorphic Cable-Driven Robots Darwin Tat Ming Lau Submitted in total fulfilment of the requirements for the degree of Doctor of Philosophy Department of Mechanical Engineering
Modelling and Analysis of Anthropomorphic Cable-Driven Robots Darwin Tat Ming Lau Submitted in total fulfilment of the requirements for the degree of Doctor of Philosophy Department of Mechanical Engineering
Design of Reconfigurable Cable-Driven Parallel Robots
 Design of Reconfigurable Cable-Driven Parallel Robots Lorenzo Gagliardini, Marc Gouttefarde, Stéphane Caro To cite this version: Lorenzo Gagliardini, Marc Gouttefarde, Stéphane Caro. Design of Reconfigurable
Design of Reconfigurable Cable-Driven Parallel Robots Lorenzo Gagliardini, Marc Gouttefarde, Stéphane Caro To cite this version: Lorenzo Gagliardini, Marc Gouttefarde, Stéphane Caro. Design of Reconfigurable
A planar parallel 3-DOF cable-driven haptic interface
 A planar parallel 3-DOF cable-driven haptic interface Clément Gosselin Department of Mechanical Engineering Université Laval Québec, Qc, Canada gosselin@gmc.ulaval.ca Régis Poulin and Denis Laurendeau
A planar parallel 3-DOF cable-driven haptic interface Clément Gosselin Department of Mechanical Engineering Université Laval Québec, Qc, Canada gosselin@gmc.ulaval.ca Régis Poulin and Denis Laurendeau
HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL
 HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL Eric H. Anderson, Michael F. Cash, Jonathan L. Hall and Gregory W. Pettit CSA Engineering Inc., Mountain View, CA Introduction Parallel kinematic manipulators
HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL Eric H. Anderson, Michael F. Cash, Jonathan L. Hall and Gregory W. Pettit CSA Engineering Inc., Mountain View, CA Introduction Parallel kinematic manipulators
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Design and Analyses of a Macro Parallel Robot with Flexure Hinges for Micro Assembly Tasks
 Design and Analyses of a Macro Parallel Robot with Flexure Hinges for Micro Assembly Tasks J. Hesselbach, A. Raatz, J. Wrege, S. Soetebier Institute of Machine Tools and Production Technology IWF Technical
Design and Analyses of a Macro Parallel Robot with Flexure Hinges for Micro Assembly Tasks J. Hesselbach, A. Raatz, J. Wrege, S. Soetebier Institute of Machine Tools and Production Technology IWF Technical
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Robotics Configuration of Robot Manipulators
 Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
IPAnema A family of cable-driven parallel robots for industrial applications
 IPAnema A family of cable-driven parallel robots for industrial applications Andreas Pott, Hendrik Mütherich, Werner Kraus, Valentin Schmidt, Philipp Miermeister and Alexander Verl Abstract Nowadays there
IPAnema A family of cable-driven parallel robots for industrial applications Andreas Pott, Hendrik Mütherich, Werner Kraus, Valentin Schmidt, Philipp Miermeister and Alexander Verl Abstract Nowadays there
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Cooperative Conveyance of an Object with Tethers by Two Mobile Robots
 Proceeding of the 11th World Congress in Mechanism and Machine Science April 1-4, 2004, Tianjin, China China Machine Press, edited by Tian Huang Cooperative Conveyance of an Object with Tethers by Two
Proceeding of the 11th World Congress in Mechanism and Machine Science April 1-4, 2004, Tianjin, China China Machine Press, edited by Tian Huang Cooperative Conveyance of an Object with Tethers by Two
A Modular Controller for Redundantly Actuated Tendon-Based Stewart Platforms
 Proceedings of EuCoMeS, the first European Conference on Mechanism Science Obergurgl (Austria), February 21 26 2006 Manfred Husty and Hans-Peter Schröcker, editors A Modular Controller for Redundantly
Proceedings of EuCoMeS, the first European Conference on Mechanism Science Obergurgl (Austria), February 21 26 2006 Manfred Husty and Hans-Peter Schröcker, editors A Modular Controller for Redundantly
 Control Considerations in the Design of a Parallel Kinematic Machine with Separate Actuation and Metrology Mechanisms Shannon C. Ridgeway Carl D. Crane III Center for Intelligent Machines and Robotics
Control Considerations in the Design of a Parallel Kinematic Machine with Separate Actuation and Metrology Mechanisms Shannon C. Ridgeway Carl D. Crane III Center for Intelligent Machines and Robotics
Spatial Six-Degree of Freedom Cable Robot Workspace Design and Movement Analysis of the Moving Platform
 Bulletin of Environment, Pharmacology and Life Sciences Bull. Env.Pharmacol. Life Sci., Vol 4 [Spl issue 1] 215: 482-489 214 Academy for Environment and Life Sciences, India Online ISSN 2277-188 Journal
Bulletin of Environment, Pharmacology and Life Sciences Bull. Env.Pharmacol. Life Sci., Vol 4 [Spl issue 1] 215: 482-489 214 Academy for Environment and Life Sciences, India Online ISSN 2277-188 Journal
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Singularity Management Of 2DOF Planar Manipulator Using Coupled Kinematics
 Singularity Management Of DOF lanar Manipulator Using oupled Kinematics Theingi, huan Li, I-Ming hen, Jorge ngeles* School of Mechanical & roduction Engineering Nanyang Technological University, Singapore
Singularity Management Of DOF lanar Manipulator Using oupled Kinematics Theingi, huan Li, I-Ming hen, Jorge ngeles* School of Mechanical & roduction Engineering Nanyang Technological University, Singapore
The forward kinematics of cable-driven parallel robots with sagging cables
 The forward kinematics of cable-driven parallel robots with sagging cables J-P. Merlet and J. Alexandre-dit-Sandretto Abstract Solving the forward kinematics (FK) of parallel robots is known to be a difficult
The forward kinematics of cable-driven parallel robots with sagging cables J-P. Merlet and J. Alexandre-dit-Sandretto Abstract Solving the forward kinematics (FK) of parallel robots is known to be a difficult
Robot. A thesis presented to. the faculty of. In partial fulfillment. of the requirements for the degree. Master of Science. Zachary J.
 Uncertainty Analysis throughout the Workspace of a Macro/Micro Cable Suspended Robot A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment
Uncertainty Analysis throughout the Workspace of a Macro/Micro Cable Suspended Robot A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University In partial fulfillment
Geometric Approach For Inverse Kinematics Solution: 3-PSU Parallel Kinematic Manipulator
 Geometric Approach For Inverse Kinematics Solution: 3-PSU Parallel Kinematic Manipulator Mr. Arya B Changela P.G. Student, School of Engineering RK University, Rajkot. Prof. Keyur P Hirpara Assistant Professor,
Geometric Approach For Inverse Kinematics Solution: 3-PSU Parallel Kinematic Manipulator Mr. Arya B Changela P.G. Student, School of Engineering RK University, Rajkot. Prof. Keyur P Hirpara Assistant Professor,
KinematicsandStaticsIncludingCableSagforLargeCableSuspendedRobots
 Global Journal of Researches in Engineering: H Robotics & Nano-Tech Volume 17 Issue 1 Version 1.0 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Inc. (USA) Online
Global Journal of Researches in Engineering: H Robotics & Nano-Tech Volume 17 Issue 1 Version 1.0 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Inc. (USA) Online
 This is an author submitted version of the paper. For final version, please contact authors at http://mrs.felk.cvut.cz Motion Planning for a Cable Driven Parallel Multiple Manipulator Emulating a Swarm
This is an author submitted version of the paper. For final version, please contact authors at http://mrs.felk.cvut.cz Motion Planning for a Cable Driven Parallel Multiple Manipulator Emulating a Swarm
CABLE manipulators are a special type of parallel robots. Synthesis of Differentially-Driven Planar Cable Parallel Manipulators
 IEEE TRANSACTIONS ON ROBOTICS 1 Synthesis of Differentially-Driven lanar Cable arallel Manipulators Hamed Khakpour, Lionel Birglen, Member, IEEE, Souheil-Antoine Tahan, Member, IEEE Abstract In this paper,
IEEE TRANSACTIONS ON ROBOTICS 1 Synthesis of Differentially-Driven lanar Cable arallel Manipulators Hamed Khakpour, Lionel Birglen, Member, IEEE, Souheil-Antoine Tahan, Member, IEEE Abstract In this paper,
A NOVEL METHOD FOR THE DESIGN OF 2-DOF PARALLEL MECHANISMS FOR MACHINING APPLICATIONS
 A NOVEL METHOD FOR THE DESIGN OF 2-DOF PARALLEL MECHANISMS FOR MACHINING APPLICATIONS Félix Majou Institut de Recherches en Communications et Cybernétique de Nantes 1, 1 rue de la Noë, 44321 Nantes, FRANCE
A NOVEL METHOD FOR THE DESIGN OF 2-DOF PARALLEL MECHANISMS FOR MACHINING APPLICATIONS Félix Majou Institut de Recherches en Communications et Cybernétique de Nantes 1, 1 rue de la Noë, 44321 Nantes, FRANCE
Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators
 Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators Arya B. Changela 1, Dr. Ramdevsinh Jhala 2, Chirag P. Kalariya 3 Keyur P. Hirpara 4 Assistant Professor, Department of Mechanical
Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators Arya B. Changela 1, Dr. Ramdevsinh Jhala 2, Chirag P. Kalariya 3 Keyur P. Hirpara 4 Assistant Professor, Department of Mechanical
A Parallel Robots Framework to Study Precision Grasping and Dexterous Manipulation
 2013 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-10, 2013 A Parallel Robots Framework to Study Precision Grasping and Dexterous Manipulation Júlia Borràs,
2013 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-10, 2013 A Parallel Robots Framework to Study Precision Grasping and Dexterous Manipulation Júlia Borràs,
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Design and Analysis of 4-DOF Cable-Driven Parallel Mechanism
 Design and Analysis of 4-DOF Cable-Driven Parallel Mechanism Darwin Lau, Trevor Hawke, Louis Kempton, Denny Oetomo, Saman Halgamuge University of Melbourne, Australia dtlau@pgradunimelbeduau, {doetomo,
Design and Analysis of 4-DOF Cable-Driven Parallel Mechanism Darwin Lau, Trevor Hawke, Louis Kempton, Denny Oetomo, Saman Halgamuge University of Melbourne, Australia dtlau@pgradunimelbeduau, {doetomo,
Chapter 1 Introduction
 Chapter 1 Introduction Generally all considerations in the force analysis of mechanisms, whether static or dynamic, the links are assumed to be rigid. The complexity of the mathematical analysis of mechanisms
Chapter 1 Introduction Generally all considerations in the force analysis of mechanisms, whether static or dynamic, the links are assumed to be rigid. The complexity of the mathematical analysis of mechanisms
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
Single Actuator Shaker Design to Generate Infinite Spatial Signatures
 2 nd International and 17 th National Conference on Machines and Mechanisms inacomm215-55 Single Actuator Shaker Design to Generate Infinite Spatial Signatures K D Lagoo, T A Dwarakanath and D N Badodkar
2 nd International and 17 th National Conference on Machines and Mechanisms inacomm215-55 Single Actuator Shaker Design to Generate Infinite Spatial Signatures K D Lagoo, T A Dwarakanath and D N Badodkar
CABLE-DRIVEN robots, referred to as cable robots in this
 890 IEEE TRANSACTIONS ON ROBOTICS, VOL. 22, NO. 5, OCTOBER 2006 Wrench-Feasible Workspace Generation for Cable-Driven Robots Paul Bosscher, Member, IEEE, Andrew T. Riechel, and Imme Ebert-Uphoff, Member,
890 IEEE TRANSACTIONS ON ROBOTICS, VOL. 22, NO. 5, OCTOBER 2006 Wrench-Feasible Workspace Generation for Cable-Driven Robots Paul Bosscher, Member, IEEE, Andrew T. Riechel, and Imme Ebert-Uphoff, Member,
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Suspended Robot Systems. A thesis presented to. the faculty of. In partial fulfillment. of the requirements for the degree.
 Hardware Application for Rapid Prototyping, Modeling and Validation of Cable- Suspended Robot Systems A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University
Hardware Application for Rapid Prototyping, Modeling and Validation of Cable- Suspended Robot Systems A thesis presented to the faculty of the Russ College of Engineering and Technology of Ohio University
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
The Pennsylvania State University. The Graduate School. College of Engineering A CABLE ARRAY ROBOT DESIGNED FOR OVERHEAD RETRIEVAL.
 The Pennsylvania State University The Graduate School College of Engineering A CABLE ARRAY ROBOT DESIGNED FOR OVERHEAD RETRIEVAL A Thesis in Industrial Engineering by Daniel J. Miner 2010 Daniel J. Miner
The Pennsylvania State University The Graduate School College of Engineering A CABLE ARRAY ROBOT DESIGNED FOR OVERHEAD RETRIEVAL A Thesis in Industrial Engineering by Daniel J. Miner 2010 Daniel J. Miner
Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering
 J.E. Akin, Rice University, Mechanical Engineering") Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering Here SolidWorks stress simulation tutorials will be re-visited to show how they
Engineering Effects of Boundary Conditions (Fixtures and Temperatures) J.E. Akin, Rice University, Mechanical Engineering Here SolidWorks stress simulation tutorials will be re-visited to show how they
DETERMINATION OF THE WORKSPACE OF A 3-PRPR PARALLEL MECHANISM FOR HUMAN-ROBOT COLLABORATION
 DETERMINATION OF THE WORKSPACE OF A 3-PRPR PARALLEL MECHANISM FOR HUMAN-ROBOT COLLABORATION Alexandre Lecours, Clément Gosselin Département de Génie Mécanique, Université Laval, Québec, Québec, Canada
DETERMINATION OF THE WORKSPACE OF A 3-PRPR PARALLEL MECHANISM FOR HUMAN-ROBOT COLLABORATION Alexandre Lecours, Clément Gosselin Département de Génie Mécanique, Université Laval, Québec, Québec, Canada
KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT
 Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
Bulletin of the Transilvania University of Braşov Vol. 8 (57) No. 2-2015 Series I: Engineering Sciences KINEMATIC AND DYNAMIC SIMULATION OF A 3DOF PARALLEL ROBOT Nadia Ramona CREŢESCU 1 Abstract: This
OPTIMIZATION OF JOINTS AND LINKS IN PLANAR PARALLEL ROBOT MECHANISMS
 International Journal of Advances in Scientific Research and Engineering (ijasre) ISSN: 2454-8006 [Vol. 03, Issue 4, May -2017] OPTIMIZATION OF JOINTS AND LINKS IN PLANAR PARALLEL ROBOT MECHANISMS Mangal
International Journal of Advances in Scientific Research and Engineering (ijasre) ISSN: 2454-8006 [Vol. 03, Issue 4, May -2017] OPTIMIZATION OF JOINTS AND LINKS IN PLANAR PARALLEL ROBOT MECHANISMS Mangal
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Modelling, Analysis and Control of Multi-Link Cable-Driven Manipulators
 Modelling, Analysis and Control of Multi-Link Cable-Driven Manipulators Jonathan Paul Eden ORCID ID: -3-733-265X Doctor of Philosophy (PhD) Thesis May 218 School of Engineering Department of Mechanical
Modelling, Analysis and Control of Multi-Link Cable-Driven Manipulators Jonathan Paul Eden ORCID ID: -3-733-265X Doctor of Philosophy (PhD) Thesis May 218 School of Engineering Department of Mechanical
Development of the Compliant Mooring Line Model for FLOW-3D
 Flow Science Report 08-15 Development of the Compliant Mooring Line Model for FLOW-3D Gengsheng Wei Flow Science, Inc. October 2015 1. Introduction Mooring systems are common in offshore structures, ship
Flow Science Report 08-15 Development of the Compliant Mooring Line Model for FLOW-3D Gengsheng Wei Flow Science, Inc. October 2015 1. Introduction Mooring systems are common in offshore structures, ship
Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA
 Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA Andrew Smyth, P.E. LPI, Inc., New York, NY, USA Abstract Overhead crane wire ropes utilized within manufacturing plants are subject to extensive
Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA Andrew Smyth, P.E. LPI, Inc., New York, NY, USA Abstract Overhead crane wire ropes utilized within manufacturing plants are subject to extensive
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
2. Motion Analysis - Sim-Mechanics
 2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
Design and Programming for Cable-Driven Parallel Robots in the German Pavilion at the EXPO 2015
 Machines 2015, 3, 223-241; doi:10.3390/machines3030223 OPEN ACCESS machines ISSN 2075-1702 www.mdpi.com/journal/machines Article Design and Programming for Cable-Driven Parallel Robots in the German Pavilion
Machines 2015, 3, 223-241; doi:10.3390/machines3030223 OPEN ACCESS machines ISSN 2075-1702 www.mdpi.com/journal/machines Article Design and Programming for Cable-Driven Parallel Robots in the German Pavilion
Kinematic Analysis and Optimum Design of 8-8 Redundant Spatial In-Parallel Maniputator
 Kinematic Analysis and Optimum Design of 8-8 Redundant Spatial In-Parallel Maniputator P.Chinna Srinivas M.Tech(CAD/CAM) Department Of Mechanical Engineering Jb Institute Of Engineering& Technology,Moinabad(Mdl)
Kinematic Analysis and Optimum Design of 8-8 Redundant Spatial In-Parallel Maniputator P.Chinna Srinivas M.Tech(CAD/CAM) Department Of Mechanical Engineering Jb Institute Of Engineering& Technology,Moinabad(Mdl)
Randomized Kinodynamic Planning for Cable-suspended Parallel Robots
 Randomized Kinodynamic Planning for Cable-suspended Parallel Robots Ricard Bordalba, Josep M. Porta, and Lluís Ros Abstract This paper proposes the use of a randomized kinodynamic planning technique to
Randomized Kinodynamic Planning for Cable-suspended Parallel Robots Ricard Bordalba, Josep M. Porta, and Lluís Ros Abstract This paper proposes the use of a randomized kinodynamic planning technique to
DEVELOPMENT OF LEG WHEEL HYBRID HEXAPOD BOT
 DEVELOPMENT OF LEG WHEEL HYBRID HEXAPOD BOT Sai Srinivas Nallamothu, Sai Preetham Sata, P. Sateesh Kumar Reddy, B. Jaswanth Babu ABSTRACT The conventional mobile robotic platforms which either uses wheels
DEVELOPMENT OF LEG WHEEL HYBRID HEXAPOD BOT Sai Srinivas Nallamothu, Sai Preetham Sata, P. Sateesh Kumar Reddy, B. Jaswanth Babu ABSTRACT The conventional mobile robotic platforms which either uses wheels
Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering. Introduction
 Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering Introduction A SolidWorks simulation tutorial is just intended to illustrate where to
Revision of the SolidWorks Variable Pressure Simulation Tutorial J.E. Akin, Rice University, Mechanical Engineering Introduction A SolidWorks simulation tutorial is just intended to illustrate where to
Stackable 4-BAR Mechanisms and Their Robotic Applications
 The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS
 33 ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS Dan Zhang Faculty of Engineering and Applied Science, University of Ontario Institute of Technology Oshawa, Ontario, L1H 7K, Canada Dan.Zhang@uoit.ca
33 ON THE RE-CONFIGURABILITY DESIGN OF PARALLEL MACHINE TOOLS Dan Zhang Faculty of Engineering and Applied Science, University of Ontario Institute of Technology Oshawa, Ontario, L1H 7K, Canada Dan.Zhang@uoit.ca
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
WEEKS 1-2 MECHANISMS
 References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
Workspaces of planar parallel manipulators
 Workspaces of planar parallel manipulators Jean-Pierre Merlet Clément M. Gosselin Nicolas Mouly INRIA Sophia-Antipolis Dép. de Génie Mécanique INRIA Rhône-Alpes BP 93 Université Laval 46 Av. Felix Viallet
Workspaces of planar parallel manipulators Jean-Pierre Merlet Clément M. Gosselin Nicolas Mouly INRIA Sophia-Antipolis Dép. de Génie Mécanique INRIA Rhône-Alpes BP 93 Université Laval 46 Av. Felix Viallet
Stability control of a wheel-legged mini-rover
 Stability control of a wheel-legged mini-rover C. Grand, F. Ben Amar, F. Plumet and Ph. Bidaud Laboratoire de Robotique de Paris, Université de Paris VI 18, route du Panorama, 92265 Fontenay-Aux-Roses,
Stability control of a wheel-legged mini-rover C. Grand, F. Ben Amar, F. Plumet and Ph. Bidaud Laboratoire de Robotique de Paris, Université de Paris VI 18, route du Panorama, 92265 Fontenay-Aux-Roses,
DEVELOPMENT OF THE NIST ROBOT CRANE TELEOPERATION CONTROLLER
 DEVELOPMENT OF THE NIST ROBOT CRANE TELEOPERATION CONTROLLER Nicholas G. Dagalakis, James S. Albus, Roger V. Bostelman, John Fiala 301-975-5845, 301-975-3418, 301-975-3426 617-353-6181 National Institute
DEVELOPMENT OF THE NIST ROBOT CRANE TELEOPERATION CONTROLLER Nicholas G. Dagalakis, James S. Albus, Roger V. Bostelman, John Fiala 301-975-5845, 301-975-3418, 301-975-3426 617-353-6181 National Institute
Estimating Inertial Parameters of Suspended Cable-Driven Parallel Robots Use Case on COGIRO
 Estimating Inertial Parameters of Suspended Cable-Driven Parallel Robots Use Case on COGIRO Philipp Tempel 1, Pierre-Elie Herve 2, Olivier Tempier 3, Marc Gouttefarde 3, and Andreas Pott 1 Abstract Model
Estimating Inertial Parameters of Suspended Cable-Driven Parallel Robots Use Case on COGIRO Philipp Tempel 1, Pierre-Elie Herve 2, Olivier Tempier 3, Marc Gouttefarde 3, and Andreas Pott 1 Abstract Model
Chapter 5 Modeling and Simulation of Mechanism
 Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
REDUNDANCY RESOLUTION OF WIRE-ACTUATED PARALLEL MANIPULATORS
 REDUNDANCY RESOLUTION OF WIRE-ACTUATED PARALLEL MANIPULATORS Maryam Agahi, Leila Notash Department of Mechanical and Materials Engineering, Queen s University, Kingston, ON, Canada, KL 3N6 E-mail: agahi@mequeensuca;
REDUNDANCY RESOLUTION OF WIRE-ACTUATED PARALLEL MANIPULATORS Maryam Agahi, Leila Notash Department of Mechanical and Materials Engineering, Queen s University, Kingston, ON, Canada, KL 3N6 E-mail: agahi@mequeensuca;
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
Automatic Control Industrial robotics
 Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Cooperating not-trushting robots
 Cooperating not-trushting robots Ing. Filip Kovář Supervisor: Prof. Ing. Michael Valášek, DrSc. Abstract This paper deals with the simulation of cooperating robots. The tested models are two planar two-arm
Cooperating not-trushting robots Ing. Filip Kovář Supervisor: Prof. Ing. Michael Valášek, DrSc. Abstract This paper deals with the simulation of cooperating robots. The tested models are two planar two-arm
Week 12 - Lecture Mechanical Event Simulation. ME Introduction to CAD/CAE Tools
 Week 12 - Lecture Mechanical Event Simulation Lecture Topics Mechanical Event Simulation Overview Additional Element Types Joint Component Description General Constraint Refresh Mesh Control Force Estimation
Week 12 - Lecture Mechanical Event Simulation Lecture Topics Mechanical Event Simulation Overview Additional Element Types Joint Component Description General Constraint Refresh Mesh Control Force Estimation
Workspace computation in parallel manipulators with three translational degrees of freedom
 Workspace computation in parallel manipulators with three translational degrees of freedom Giovanni Boschetti, Roberto Caracciolo Department of Industrial and Engineering, University of Padua, Italy E-mail:
Workspace computation in parallel manipulators with three translational degrees of freedom Giovanni Boschetti, Roberto Caracciolo Department of Industrial and Engineering, University of Padua, Italy E-mail:
Fundamentals of Inverse Kinematics Using Scara Robot
 Fundamentals of Inverse Kinematics Using Scara Robot Overview of SCARA Bot: The 2 Degree of freedom (DOF) Selective Compliance Articulate Robotic Arm (SCARA) (Selective Compliance Articulated Robot Arm)
Fundamentals of Inverse Kinematics Using Scara Robot Overview of SCARA Bot: The 2 Degree of freedom (DOF) Selective Compliance Articulate Robotic Arm (SCARA) (Selective Compliance Articulated Robot Arm)
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures
 Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures S. B. Nokleby F. Firmani A. Zibil R. P. Podhorodeski UOIT University of Victoria University of Victoria University of Victoria
Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures S. B. Nokleby F. Firmani A. Zibil R. P. Podhorodeski UOIT University of Victoria University of Victoria University of Victoria
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Some algebraic geometry problems arising in the field of mechanism theory. J-P. Merlet INRIA, BP Sophia Antipolis Cedex France
 Some algebraic geometry problems arising in the field of mechanism theory J-P. Merlet INRIA, BP 93 06902 Sophia Antipolis Cedex France Abstract Mechanism theory has always been a favorite field of study
Some algebraic geometry problems arising in the field of mechanism theory J-P. Merlet INRIA, BP 93 06902 Sophia Antipolis Cedex France Abstract Mechanism theory has always been a favorite field of study
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms
 Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Dynamics and Vibration Control of Flexible Systems
 The 9th Workshop on Control of Distributed Parameter Systems IEEE ICAL 2009, Shenyang Dynamics and Vibration Control of Flexible Systems Wei He 1 and Shuzhi Sam Ge 2 1 School of Automation & Electrical
The 9th Workshop on Control of Distributed Parameter Systems IEEE ICAL 2009, Shenyang Dynamics and Vibration Control of Flexible Systems Wei He 1 and Shuzhi Sam Ge 2 1 School of Automation & Electrical
Electromechanical Materials Testing Machines EM0 series
 MICROTEST Electromechanical Materials Testing Machines EM0 MICROTEST - Electromechanical Materials Testing Machines EM0 series MICROTEST MICROTEST, S.A. Instruments and Equipments for Materials Testing
MICROTEST Electromechanical Materials Testing Machines EM0 MICROTEST - Electromechanical Materials Testing Machines EM0 series MICROTEST MICROTEST, S.A. Instruments and Equipments for Materials Testing
THE KINEMATIC DESIGN OF A 3-DOF HYBRID MANIPULATOR
 D. CHABLAT, P. WENGER, J. ANGELES* Institut de Recherche en Cybernétique de Nantes (IRCyN) 1, Rue de la Noë - BP 92101-44321 Nantes Cedex 3 - France Damien.Chablat@ircyn.ec-nantes.fr * McGill University,
D. CHABLAT, P. WENGER, J. ANGELES* Institut de Recherche en Cybernétique de Nantes (IRCyN) 1, Rue de la Noë - BP 92101-44321 Nantes Cedex 3 - France Damien.Chablat@ircyn.ec-nantes.fr * McGill University,
Introduction to FEM Modeling
 Total Analysis Solution for Multi-disciplinary Optimum Design Apoorv Sharma midas NFX CAE Consultant 1 1. Introduction 2. Element Types 3. Sample Exercise: 1D Modeling 4. Meshing Tools 5. Loads and Boundary
Total Analysis Solution for Multi-disciplinary Optimum Design Apoorv Sharma midas NFX CAE Consultant 1 1. Introduction 2. Element Types 3. Sample Exercise: 1D Modeling 4. Meshing Tools 5. Loads and Boundary
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Design of a Precision Robot Wrist Interface. Patrick Willoughby Advisor: Alexander Slocum MIT Precision Engineering Research Group
 Design of a Precision Robot Wrist Interface Patrick Willoughby Advisor: Alexander Slocum MIT Precision Engineering Research Group Project Summary Problem: Current bolted robot wrist replacements are inaccurate,
Design of a Precision Robot Wrist Interface Patrick Willoughby Advisor: Alexander Slocum MIT Precision Engineering Research Group Project Summary Problem: Current bolted robot wrist replacements are inaccurate,
Design of a Flexural Joint using Finite Element Method
 Design of a Flexural Joint using Finite Element Method Abdullah Aamir Hayat, Adnan Akhlaq, M. Naushad Alam Abstract This paper presents the design and analysis of a compliant mechanism using hyperbolic
Design of a Flexural Joint using Finite Element Method Abdullah Aamir Hayat, Adnan Akhlaq, M. Naushad Alam Abstract This paper presents the design and analysis of a compliant mechanism using hyperbolic
Deployable Folded-core Sandwich Panels Guided by a Generating Surface
 Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam 17-20 August 2015, Amsterdam, The Netherlands Deployable Folded-core Sandwich Panels Guided
Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium 2015, Amsterdam 17-20 August 2015, Amsterdam, The Netherlands Deployable Folded-core Sandwich Panels Guided
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Discrete Reconfigurations of Cable-Driven Parallel Robots
 Discrete Reconfigurations of Cable-Driven Parallel Robots Lorenzo Gagliardini To cite this version: Lorenzo Gagliardini. Discrete Reconfigurations of Cable-Driven Parallel Robots. Automatic. Ecole Centrale
Discrete Reconfigurations of Cable-Driven Parallel Robots Lorenzo Gagliardini To cite this version: Lorenzo Gagliardini. Discrete Reconfigurations of Cable-Driven Parallel Robots. Automatic. Ecole Centrale
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Constraint and velocity analysis of mechanisms
 Constraint and velocity analysis of mechanisms Matteo Zoppi Dimiter Zlatanov DIMEC University of Genoa Genoa, Italy Su S ZZ-2 Outline Generalities Constraint and mobility analysis Examples of geometric
Constraint and velocity analysis of mechanisms Matteo Zoppi Dimiter Zlatanov DIMEC University of Genoa Genoa, Italy Su S ZZ-2 Outline Generalities Constraint and mobility analysis Examples of geometric
Robots & Cellular Automata
 Integrated Seminar: Intelligent Robotics Robots & Cellular Automata Julius Mayer Table of Contents Cellular Automata Introduction Update Rule 3 4 Neighborhood 5 Examples. 6 Robots Cellular Neural Network
Integrated Seminar: Intelligent Robotics Robots & Cellular Automata Julius Mayer Table of Contents Cellular Automata Introduction Update Rule 3 4 Neighborhood 5 Examples. 6 Robots Cellular Neural Network
COPYRIGHTED MATERIAL INTRODUCTION CHAPTER 1
 CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
CHAPTER 1 INTRODUCTION Modern mechanical and aerospace systems are often very complex and consist of many components interconnected by joints and force elements such as springs, dampers, and actuators.
SimWise. 3D Dynamic Motion, and Stress Analysis. integrated with Alibre Design
 SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
THE POSITION AND ORIENTATION MEASUREMENT OF GONDOLA USING A VISUAL CAMERA
 THE POSITION AND ORIENTATION MEASUREMENT OF GONDOLA USING A VISUAL CAMERA Hwadong Sun 1, Dong Yeop Kim 1 *, Joon Ho Kwon 2, Bong-Seok Kim 1, and Chang-Woo Park 1 1 Intelligent Robotics Research Center,
THE POSITION AND ORIENTATION MEASUREMENT OF GONDOLA USING A VISUAL CAMERA Hwadong Sun 1, Dong Yeop Kim 1 *, Joon Ho Kwon 2, Bong-Seok Kim 1, and Chang-Woo Park 1 1 Intelligent Robotics Research Center,