Manifold T-spline. Ying He 1 Kexiang Wang 2 Hongyu Wang 2 Xianfeng David Gu 2 Hong Qin 2. Geometric Modeling and Processing 2006
|
|
|
- Ethan Osborne
- 5 years ago
- Views:
Transcription
1 Ying He 1 Kexiang Wang 2 Hongyu Wang 2 Xianfeng David Gu 2 Hong Qin 2 1 School of Computer Engineering Nanyang Technological University, Singapore 2 Center for Visual Computing (CVC) Stony Brook University, USA Geometric Modeling and Processing 2006
2 Geometry Erlangen Program - F. Klein 1872 Different geometries study the invariants under different transformation groups. Euclidean Geometry : Rigid motion on R 2. Distances between arbitrary two points are the invariants. Affine Geometry: Affine transformations. Parallelism and barry centric coordinates are the invariants. Real Projective Geometry: Real projective transformations. Collinearity and cross ratios are the invariants.
3 Geometry Erlangen Program - F. Klein 1872 Different geometries study the invariants under different transformation groups. Euclidean Geometry : Rigid motion on R 2. Distances between arbitrary two points are the invariants. Affine Geometry: Affine transformations. Parallelism and barry centric coordinates are the invariants. Real Projective Geometry: Real projective transformations. Collinearity and cross ratios are the invariants.
4 Algorithms vs. Geometries Central Problem Can different geometries be defined on general surfaces? Can different planar algorithms be generalized to surface domains directly? The answers are yes and yes. The major theoretic tool is the Geometric Structure.
5 Algorithms vs. Geometries Central Problem Can different geometries be defined on general surfaces? Can different planar algorithms be generalized to surface domains directly? The answers are yes and yes. The major theoretic tool is the Geometric Structure.
6 Main Ideas Geometry Structure A surface is covered by local coordinate charts. Geometric construction is invariant during the transition from one local coordinate to another.
7 Manifold U α U β g replacements φ α S φ β φ αβ φ α (U α ) φ β (U β )
8 Manifold Definition (Manifold) A manifold is a topological space Σ covered by a set of open sets {U α }. A homeomorphism φ α : U α R n maps U α to the Euclidean space R n. (U α, φ α ) is called a chart of Σ, the set of all charts {(U α, φ α )} form the atlas of Σ. Suppose U α U β, then φ αβ = φ β φ α : φ α (U α U β ) φ β (U α U β ) is a transition map. Transition maps satisfy cocycle condition, suppose U α U β U γ, then φ βγ φ αβ = φ αγ.
9 (X, G) structure Definition ((X,G) Atlas) Suppose X is a topological space, G is the transformation group of X. A manifold Σ with an atlas A = {(U α, φ α )} is an (X, G) atlas if 1 φ α (U α ) X, for all charts (U α, φ α ). 2 Transition maps φ αβ G.
10 (X,G) structure Definition (Equivalent (X, G) atlases) Two (X, G) atlases A 1 and A 2 of Σ are equivalent, if their union is still an (X, G) atlas of Σ. Definition ((X,G) structure) An (X, G) structure of a manifold Σ is an equivalent class of its (X, G) atlases.
11 (X,G) structure Definition (Equivalent (X, G) atlases) Two (X, G) atlases A 1 and A 2 of Σ are equivalent, if their union is still an (X, G) atlas of Σ. Definition ((X,G) structure) An (X, G) structure of a manifold Σ is an equivalent class of its (X, G) atlases.



12 Geometries M.C.Esher s art works: Angels and Devils Regular divisin Sphere with Angels Circle limit IV of the plane and Devils Heaven and Hell
13 Geometries defined on surfaces
14 Common (X,G) structure lacements g T(P) T(g(P)) lacements g T(P) T(g(P)) Spherical Structure X: Unit sphere S 2. G: Rotation group. Surfaces: Genus zero closed surfaces; any open surfaces. Harmonic maps.
15 Common (X,G) structure lacements g T(P) T(g(P)) lacements g T(P) T(g(P)) Spherical Structure X: Unit sphere S 2. G: Rotation group. Surfaces: Genus zero closed surfaces; any open surfaces. Harmonic maps.
16 Common (X,G) structure lacements g T(P) T(g(P)) lacements g T(P) T(g(P)) Affine Structure X: Real plane R 2. G: Affine transformation group. Surfaces: Genus one closed surface and open surfaces. Holomorphic 1-forms.
17 Common (X,G) structure lacements g T(P) T(g(P)) lacements g T(P) T(g(P)) Affine Structure X: Real plane R 2. G: Affine transformation group. Surfaces: Genus one closed surface and open surfaces. Holomorphic 1-forms.
18 Common (X,G) structure lacements g T(P) T(g(P)) lacements g T(P) T(g(P)) Hyperbolic Structure X: Hyperbolic plane H 2. G: Möbius transformation group. Surfaces: with negative Euler number. Hyperbolic Ricci flow
19 Common (X,G) structure lacements g T(P) T(g(P)) lacements g T(P) T(g(P)) Hyperbolic Structure X: Hyperbolic plane H 2. G: Möbius transformation group. Surfaces: with negative Euler number. Hyperbolic Ricci flow
20 Common (X,G) structure lacements g T(P) T(g(P)) lacements g T(P) T(g(P)) Real Projective Structure X: Real projective plane RP 2. G: Real projective transformation group. Surfaces: any surface. Hyperbolic Ricci flow.
21 Common (X,G) structure lacements g T(P) T(g(P)) lacements g T(P) T(g(P)) Real Projective Structure X: Real projective plane RP 2. G: Real projective transformation group. Surfaces: any surface. Hyperbolic Ricci flow.
22 Pseudo (X,G) structure lacements g T(P) T(g(P)) Conformal Structure X: Complex plane C. G: Biholomorphic maps. Surfaces: any surface. Holomorphic 1-forms lacements g T(P) T(g(P))
23 Pseudo (X,G) structure lacements g T(P) T(g(P)) Conformal Structure X: Complex plane C. G: Biholomorphic maps. Surfaces: any surface. Holomorphic 1-forms lacements g T(P) T(g(P))

 T(g(P)) T(P) T(g(P))")
)")

24 Conformal Structure cementspsfrag replacementspsfrag replacements g g g T(P) T(g(P)) T(P) T(g(P)) T(P) T(g(P)) cementspsfrag replacementspsfrag replacements g g g T(P) T(g(P)) T(P) T(g(P)) T(P) T(g(P))
25 (X,G) Invariant Algorithms Definition ((X,G) invariant Algorithm) Suppose X is a topological space, G is the transformation group on X. A geometric operator Ω defined on X is (X, G) invariant, if and only if Examples: Ω g = g Ω, g G. Convex Hull: Projective invariant. Voronoi Diagram: Rigid motion invariant. Polar form : Affine invariant.
26 (X,G) structure Theorem Suppose a manifold with an (X, G) structure, then any (X, G) invariant algorithms can be generalized on the manifold. Corollary (Manifold Splines - Gu,He,Qin 2005) Spline schemes based on polar forms can be defined on a manifold, if and only if the manifold has an affine structure.
 T(g(P)) Parametric Affine")

27 Planar Splines cements g T(P) T(g(P)) PSfrag replacements g T(P) T(g(P)) Parametric Affine Invariant The spline is invariants under the affine transformations of the knots and the parameters.
28 Manifold SPlines F ents C α, F α φ α (U α ) φ β (U β ) φ α U α U β M Z φ β C β, F β φ α,β = φ β φ 1 α Idea: Geometry Structure A mesh is covered by local coordinate charts. Geometric construction is invariant during the transition from one local coordinate to another. Global Parameterization Find atlas with special transition functions.
29 Manifold SPlines F ents C α, F α φ α (U α ) φ β (U β ) φ α U α U β M Z φ β C β, F β φ α,β = φ β φ 1 α Idea: Geometry Structure A mesh is covered by local coordinate charts. Geometric construction is invariant during the transition from one local coordinate to another. Global Parameterization Find atlas with special transition functions.
30 Topological Obstructions Theorem (Benzécri 1959) If a closed surface admits an affine structure, it has zero Euler class. Real projective structure Real projective structure is general, it exists for all surfaces. Real projective structure is simple, all transitions are linear rational functions. Real projective structure is suitable for designing manifold spline schemes.
31 Topological Obstructions Theorem (Benzécri 1959) If a closed surface admits an affine structure, it has zero Euler class. Real projective structure Real projective structure is general, it exists for all surfaces. Real projective structure is simple, all transitions are linear rational functions. Real projective structure is suitable for designing manifold spline schemes.

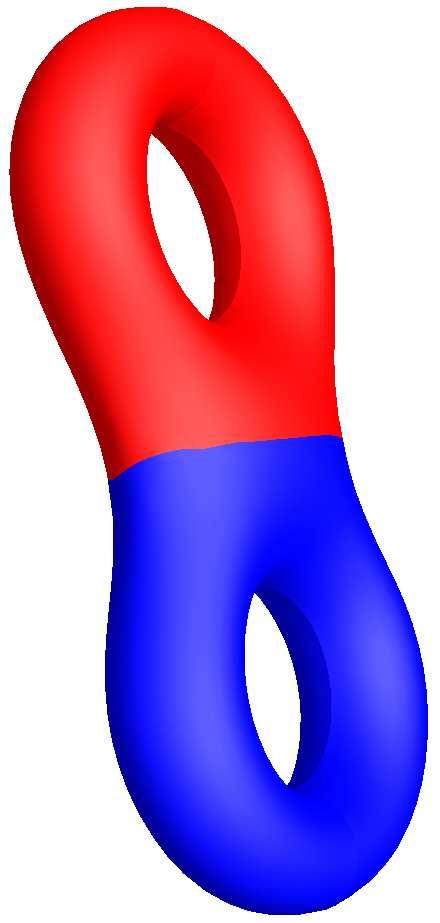
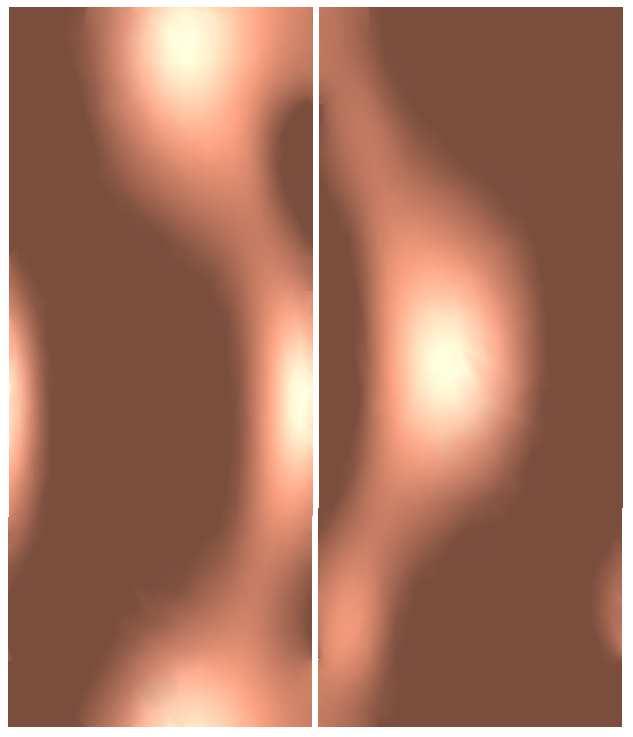
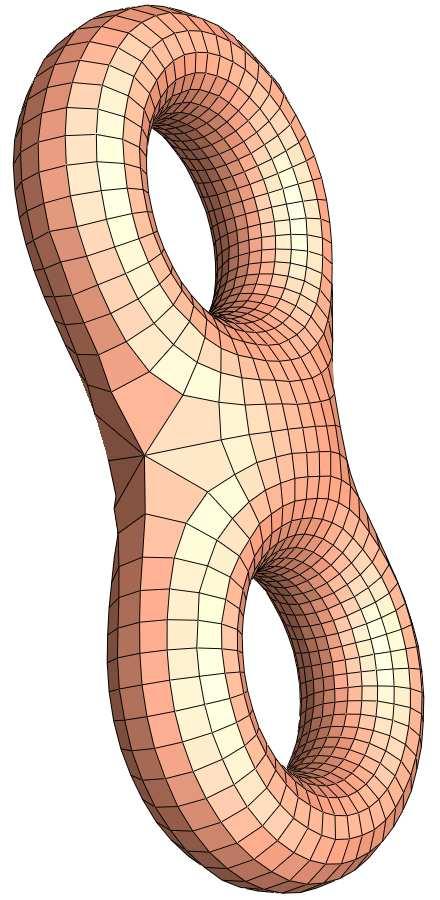
32 Conformal Structure Global Tensor Product Structure
33 Holomorphic 1-forms Definition (Holomorphic 1-form) Suppose Σ is a Riemann surface, {z α } is a local complex parameter, a holomorphic 1-form ω has a local representation as ω = f (z α )dz α, where f (z α ) is a holomorphic function. PSfrag replacements g Locally, ω is the derivative of a T(P) holomorphic function. Globally, T(g(P)) it is not.

34 Holomorphic 1-forms Original Surface

35 Holomorphic 1-forms One basis holomorphic 1- form

36 Holomorphic 1-forms Another one basis holomorphic 1-form

37 Holomorphic 1-forms Summation of ω 1 and ω 2

38 Holomorphic 1-forms Difference between ω 1 and ω 2

39 Holomorphic 1-forms Holomorphic 1-form induces a conformal parameterization.

40 Holomorphic 1-forms Holomorphic 1-form induces a conformal parameterization.
 which is isomorphic to the first cohomology group H 1 (Σ,")
41 Holomorphic 1-forms Theorem (Holomorphic 1-forms) All holomorphic 1-forms form a linear space Ω(Σ) which is isomorphic to the first cohomology group H 1 (Σ, R).

42 Affine Structure Theorem Holomorphic 1-form induces affine structure By integrating a holomorphic 1-form, local coordinate charts can be established. The charts covers the surface without the singularises, the transition maps are translations.


43 Manifold Splines SPM2005

44 Manifold Powell-Sabin Spline

45 Manifold Powell-Sabin Spline

46 T-spline T-spline is the superset of tensor-product B-spline and industry-standard NURBS Allow T-junction in parametric domain and control net Natural hierarchical structure Much more flexible than NURBS!

47 Critical Graph


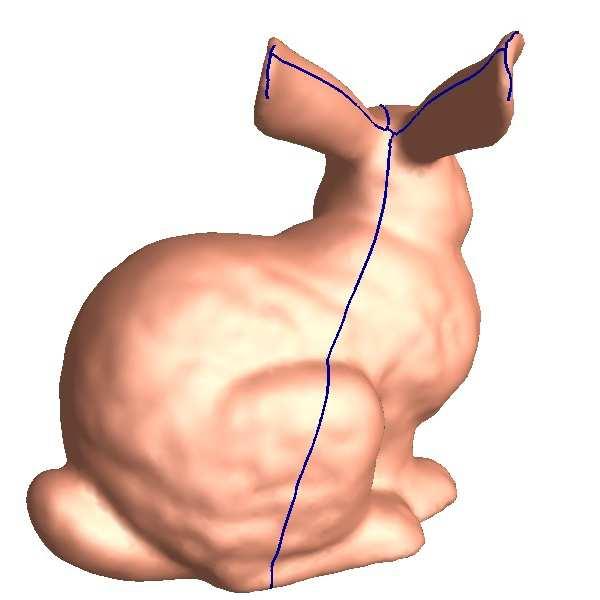
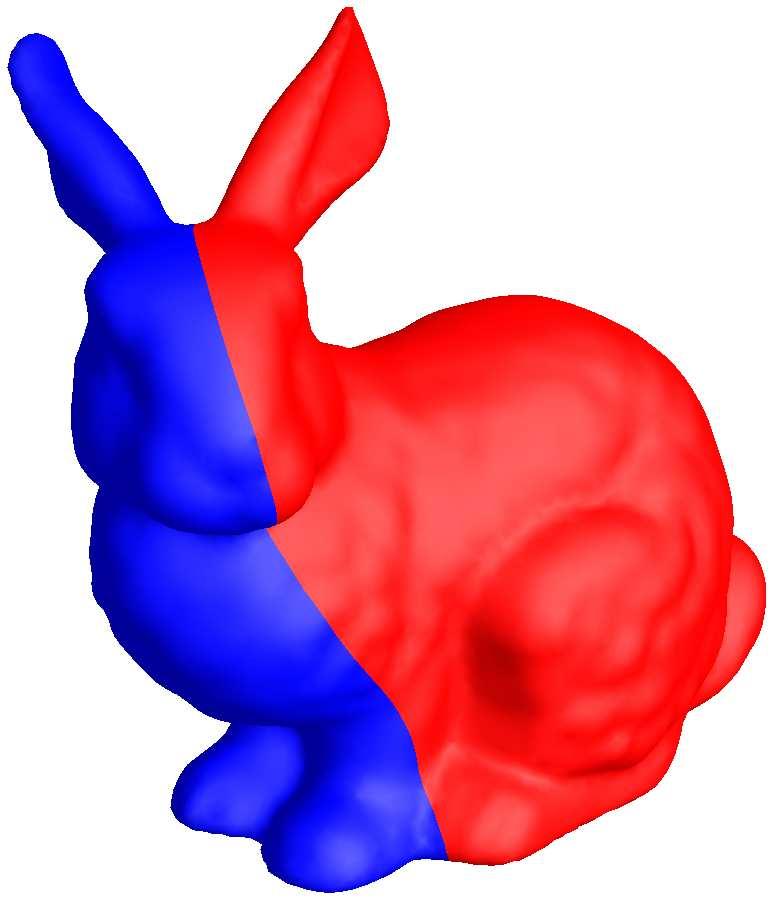
48 Critical Graph and Local Charts

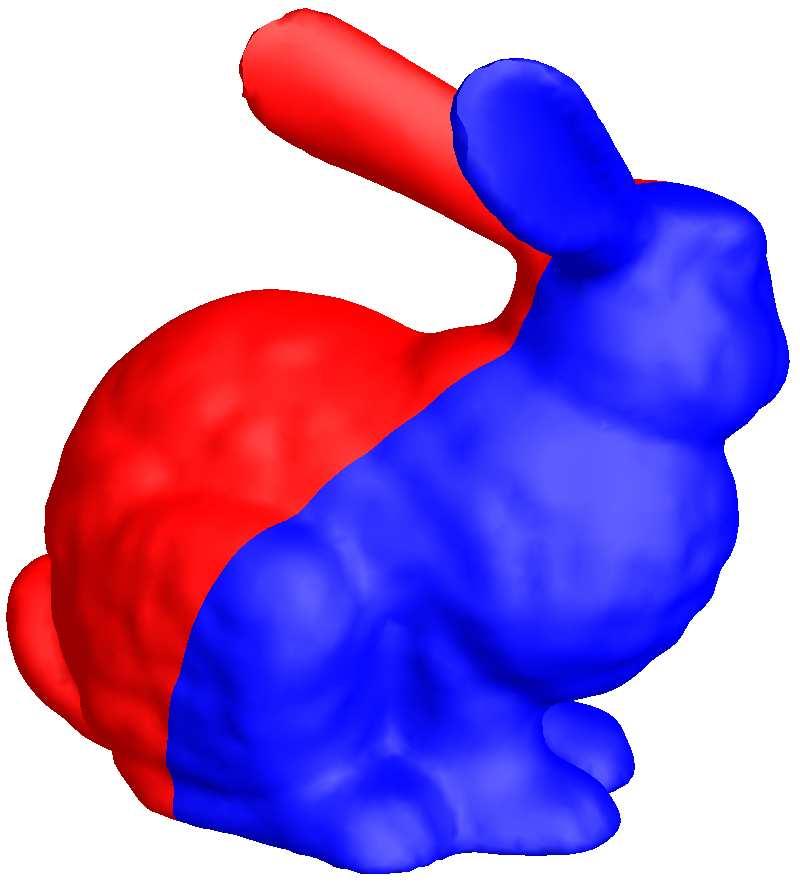
49 Critical Graph
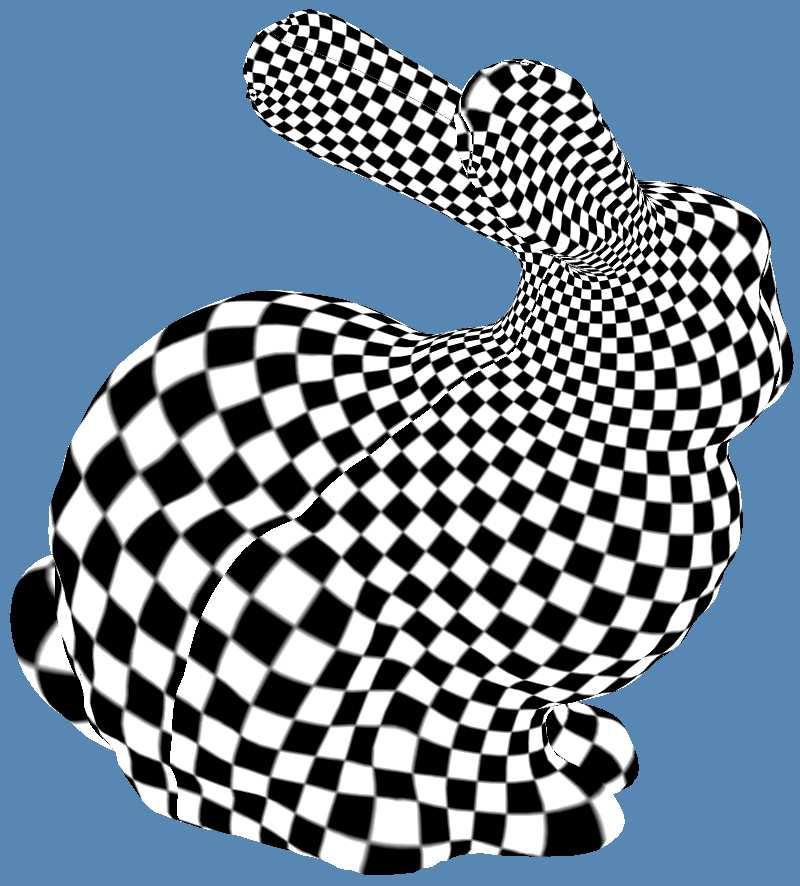
50 Given the domain manifold M with conformal structure φ : M R 2, the manifold T-spline can be formulated as follows: F(u) = n C i B i (φ(u)), u M, (1) i=1 where B i s are basis functions and C i = (x i, y i, z i, w i ) are control points in P 4 whose weights are w i, and whose Cartesian coordinates are 1 w i (x i, y i, z i ). The cartesian coordinates of points on the surface are given by n i=1 (x i, y i, z i )B i (φ(u)) n i=1 w. (2) ib i (φ(u)) Given a parameter u M, the evaluation can be carried out on arbitrary charts covering u.
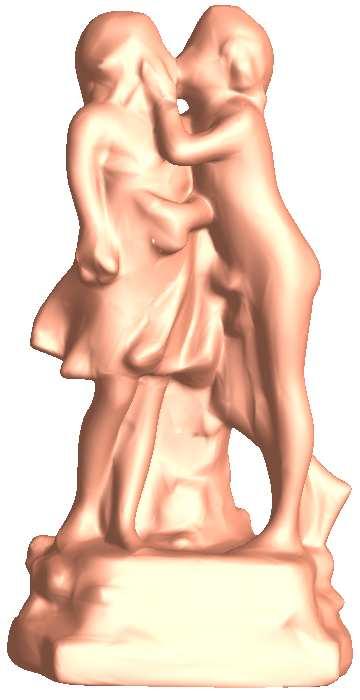
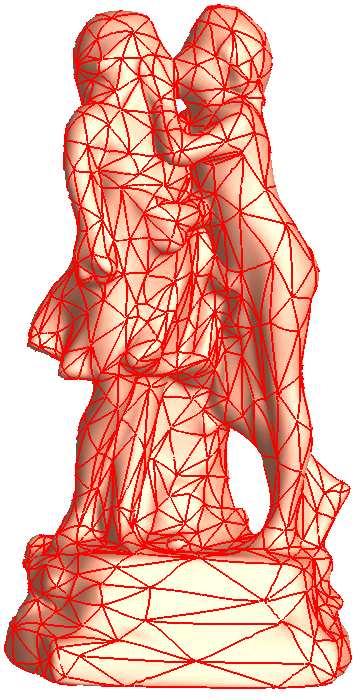
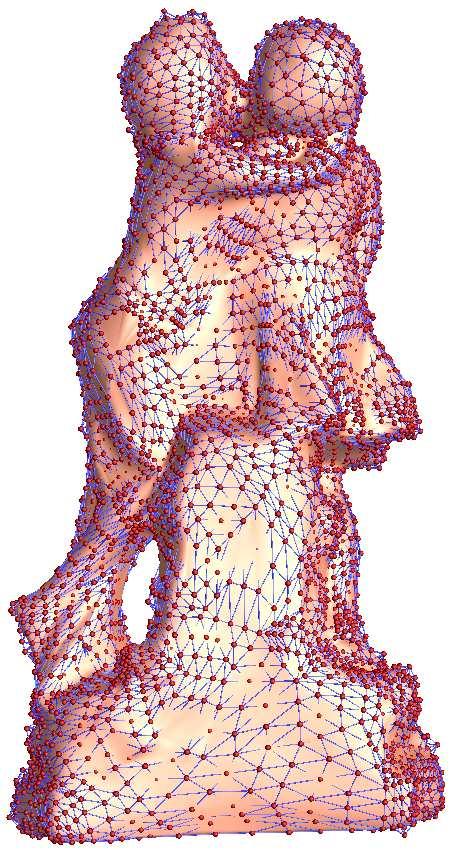
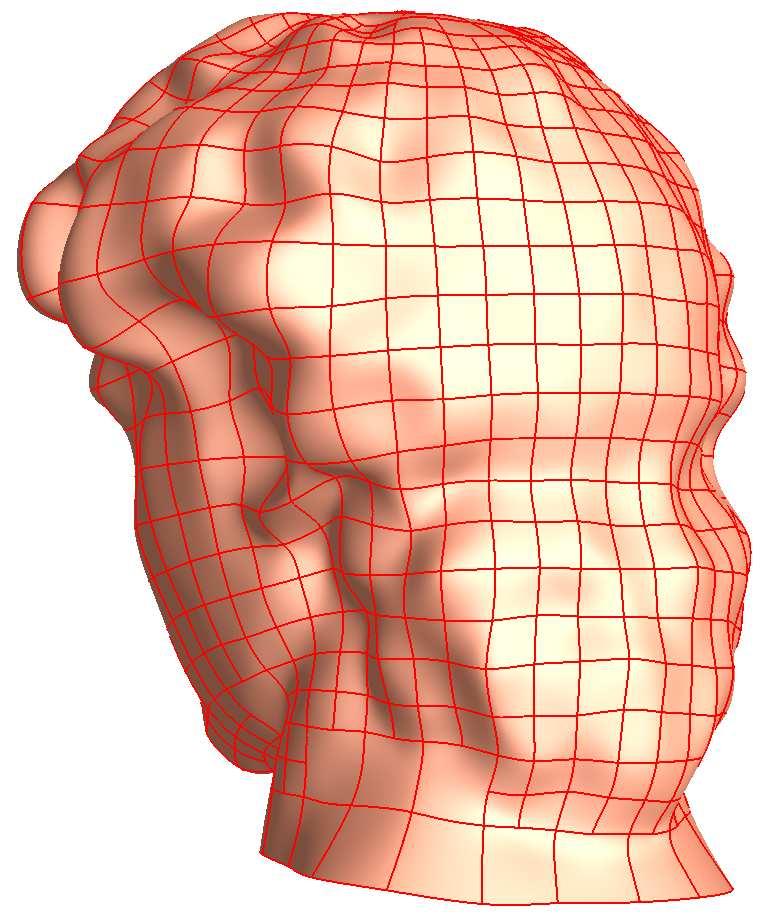
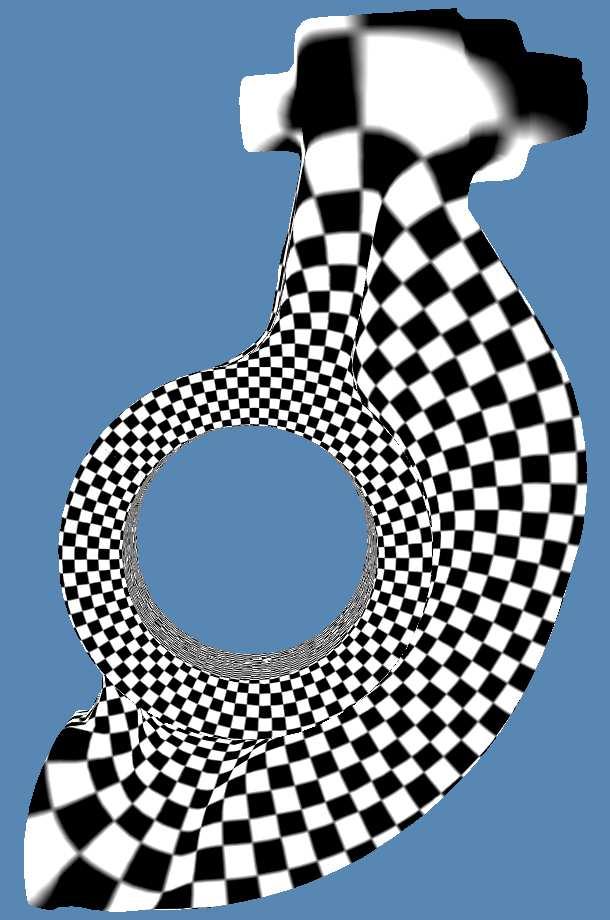
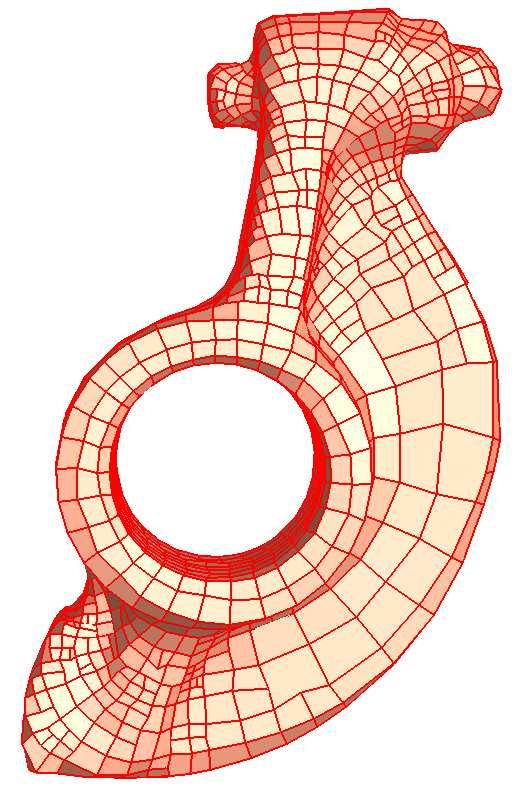
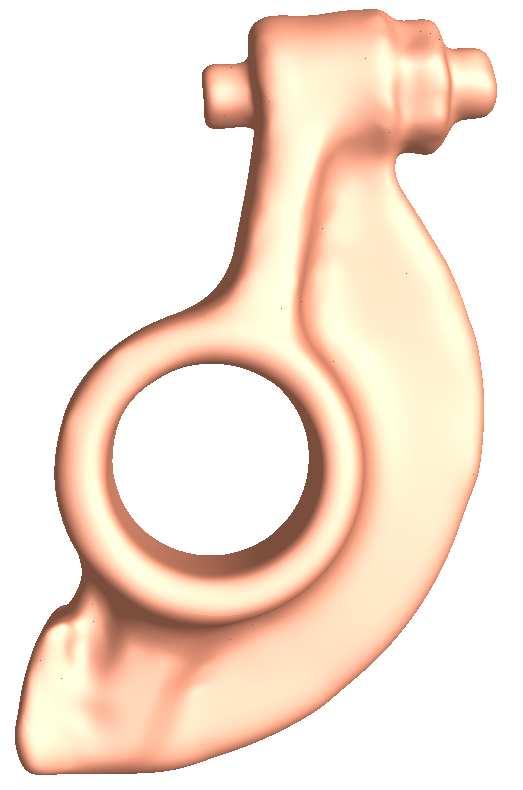
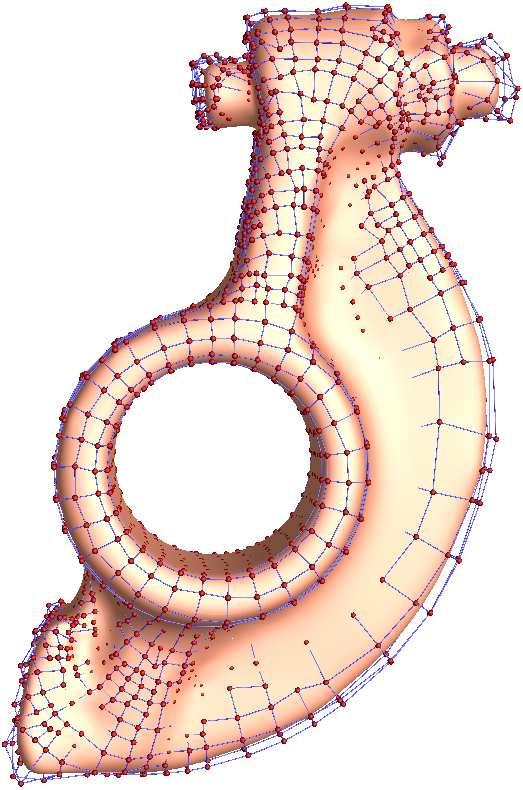
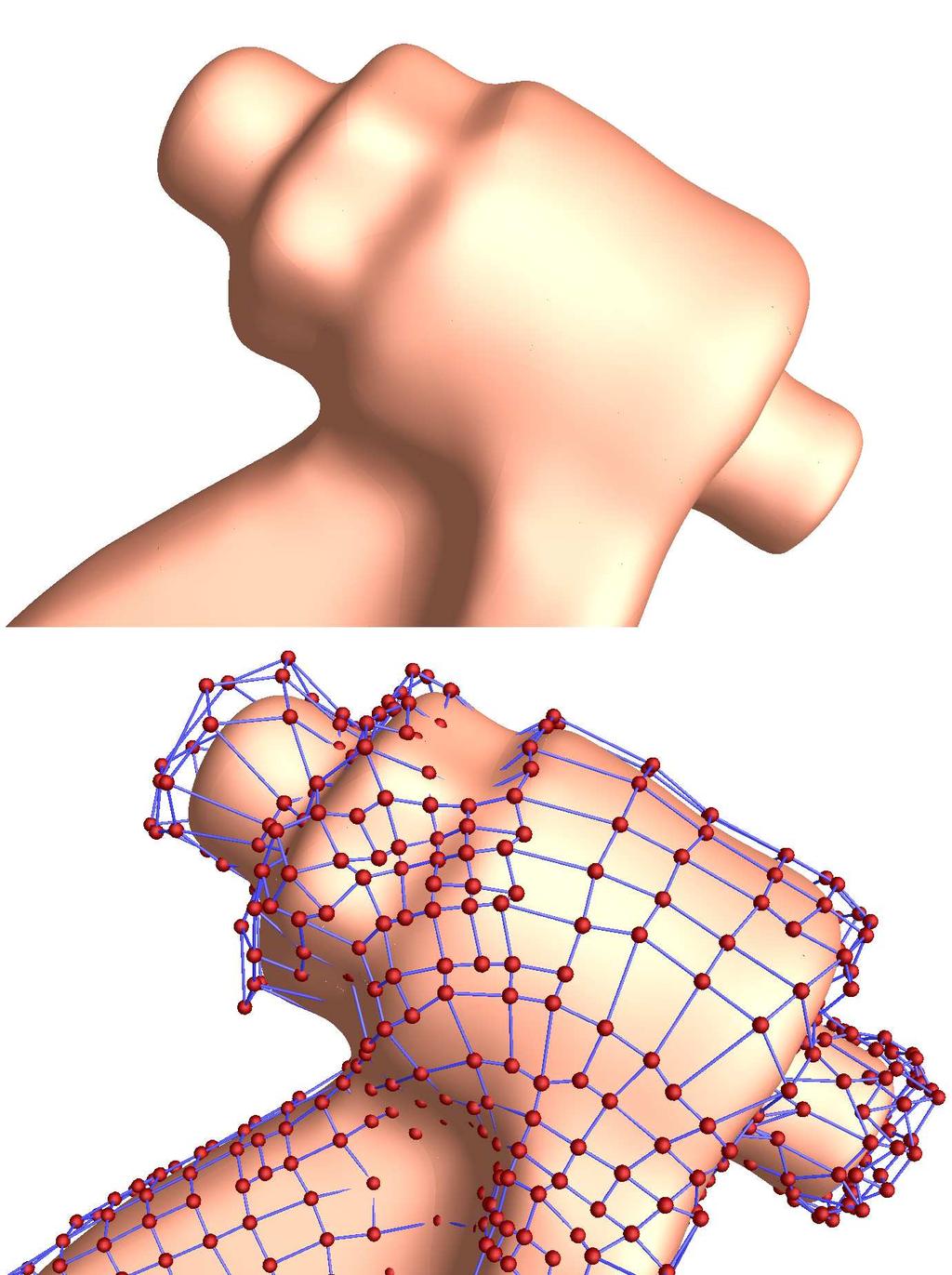
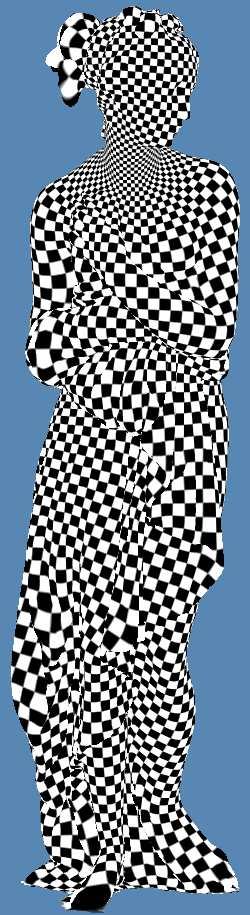
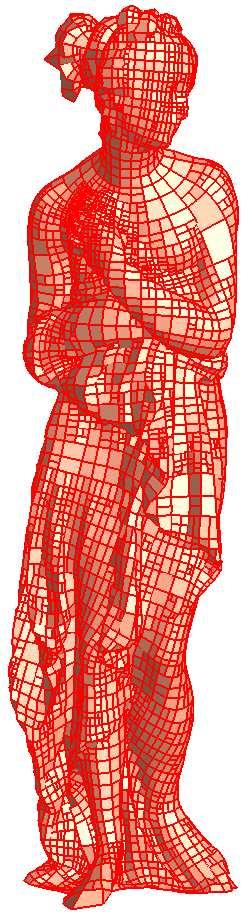
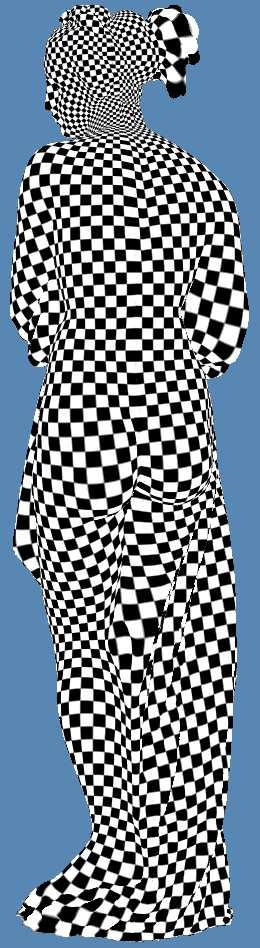
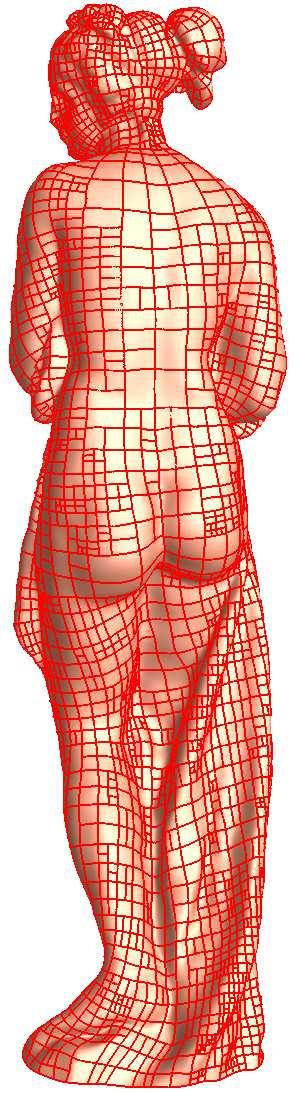
51 Hierarchical Surface Reconstruction Minimize a linear combination of interpolation and fairness functionals, min E = E dist + λe fair, (3) where E dist = m F(u i ) p i 2 i=1 and E fair in (3) is a smoothing term.
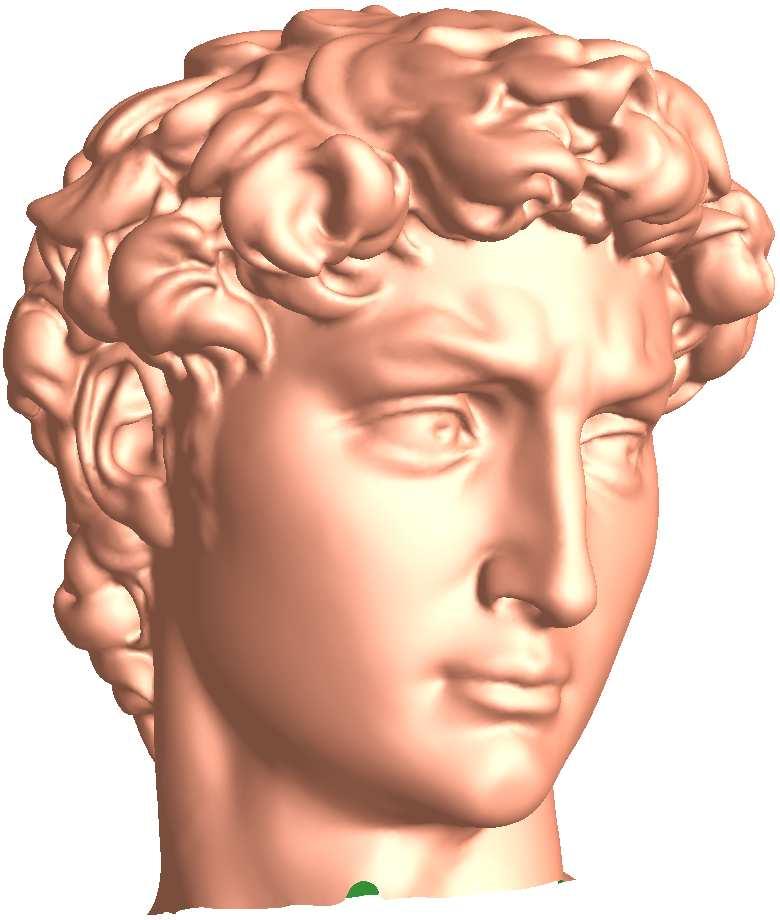
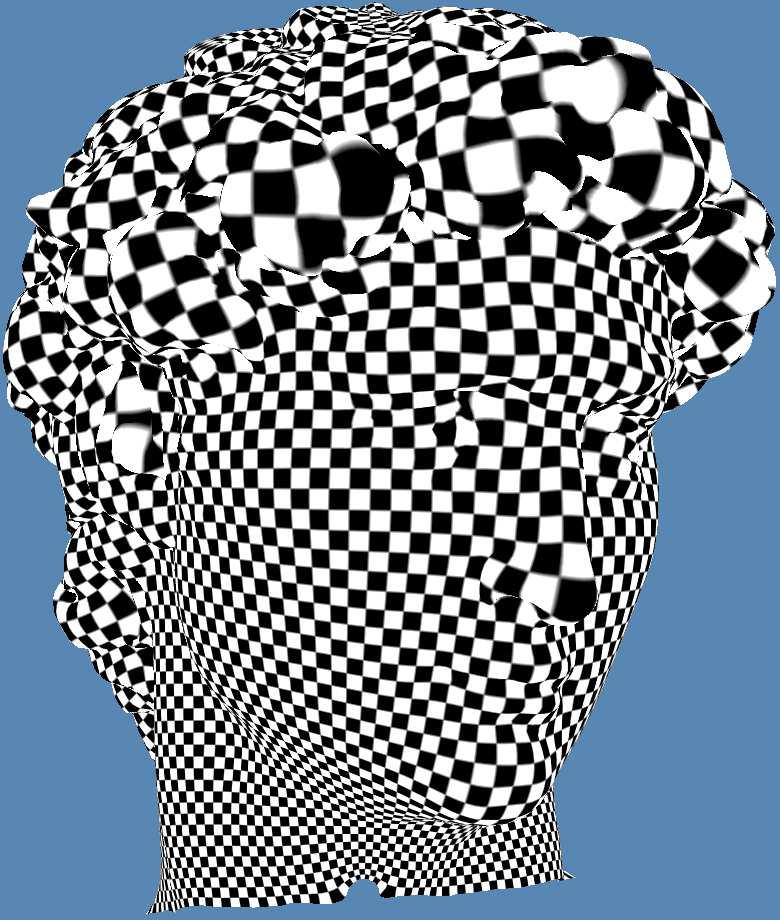
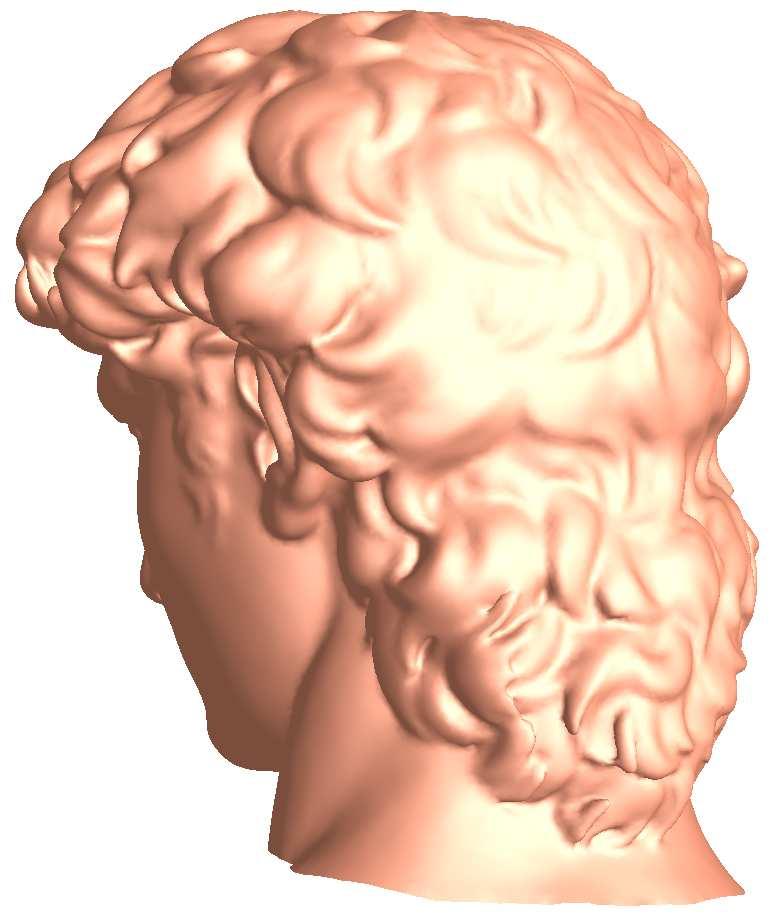
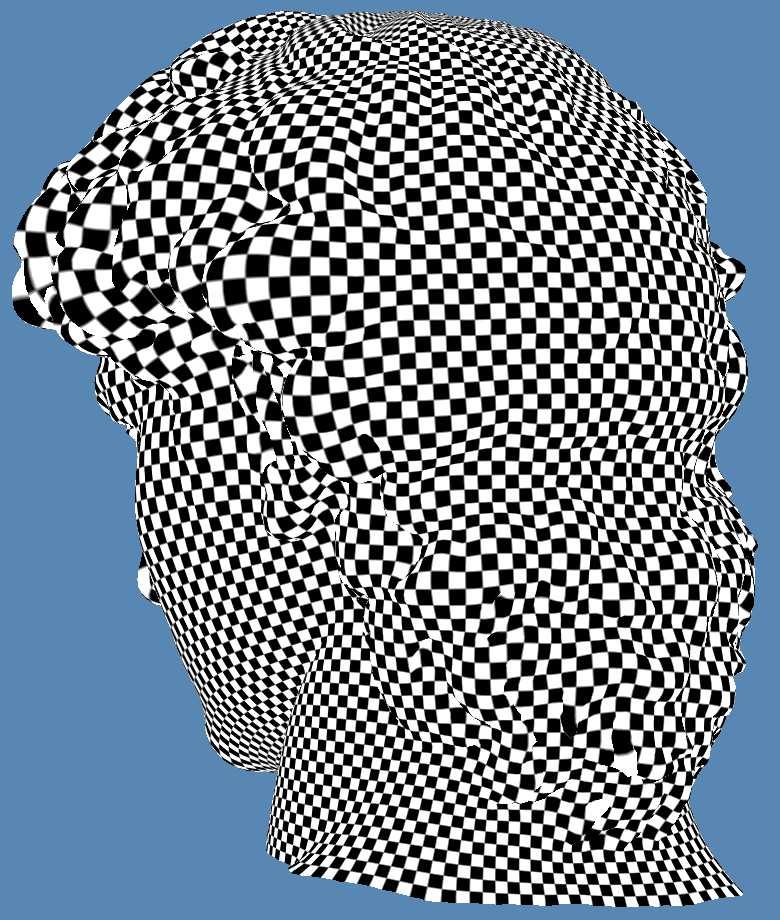
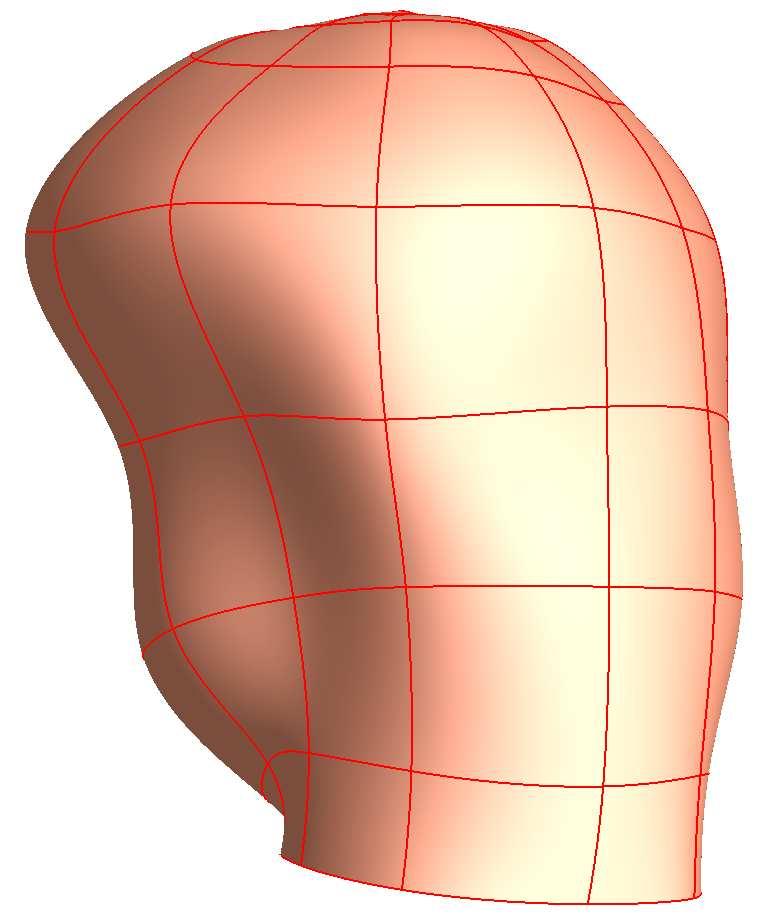
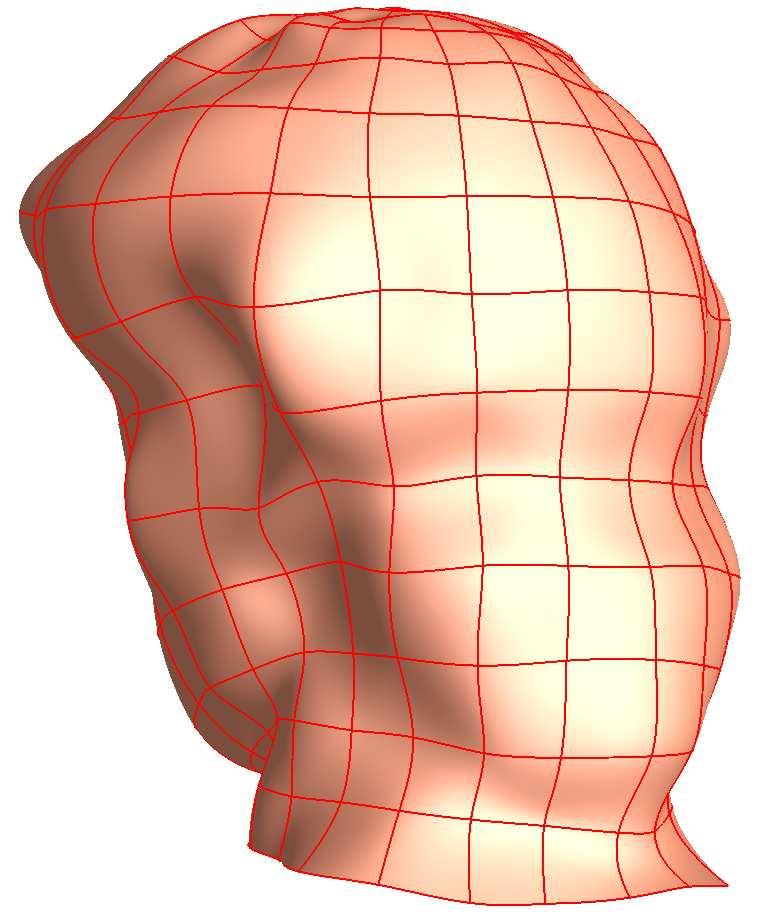
52 Hierarchical Surface Reconstruction P, N v = 200K Conformal structure N 1 c = 105 L 1 = 9.6% N 2 c = 295 L 2 = 5.7%

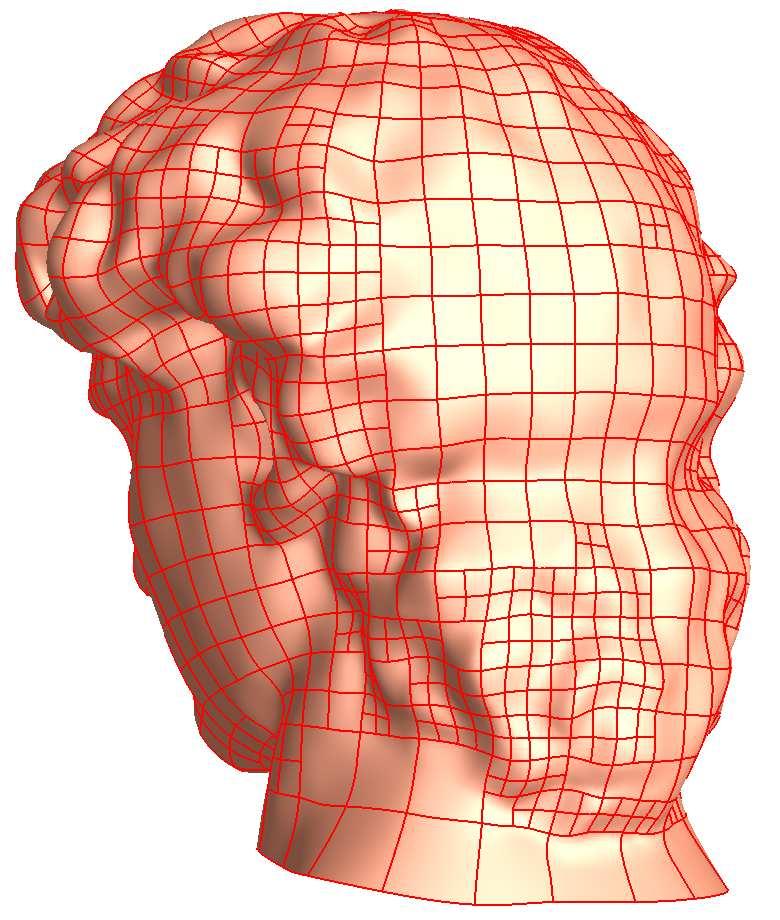
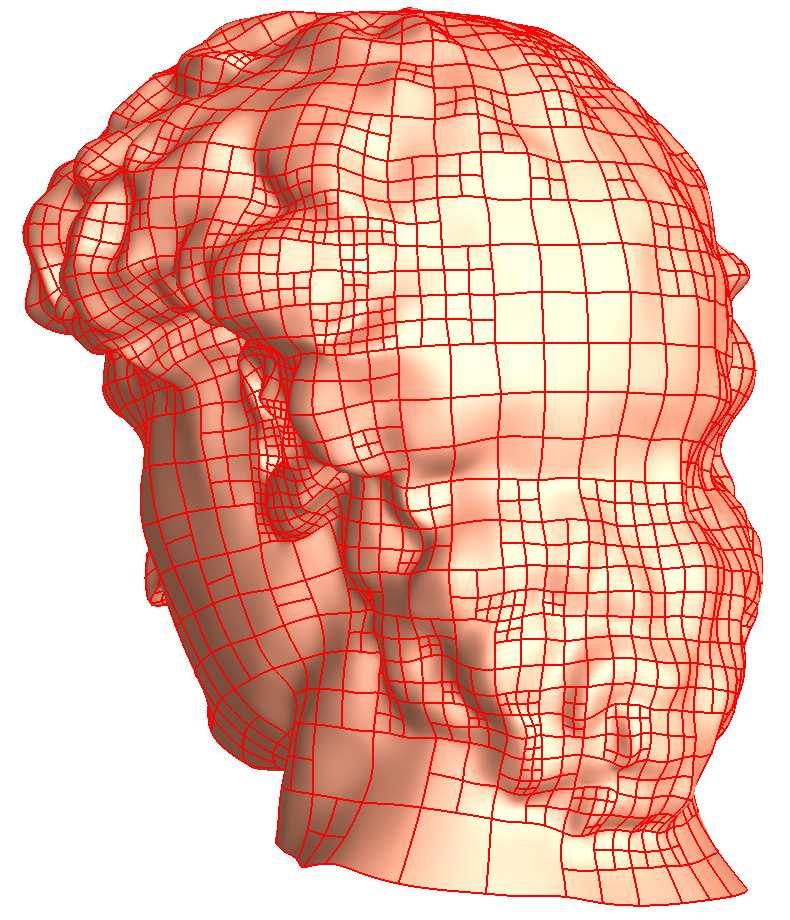
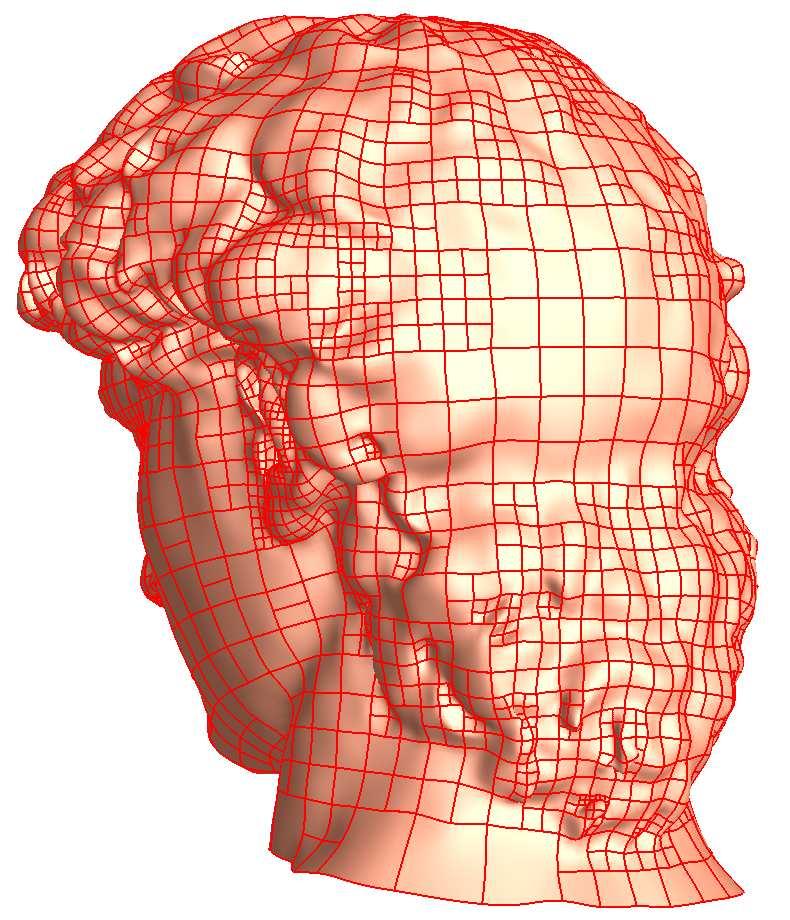
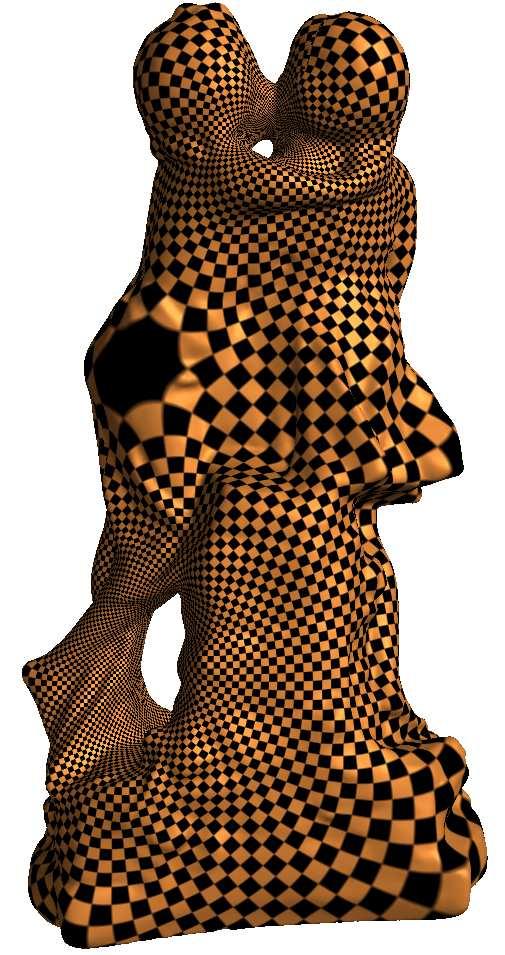
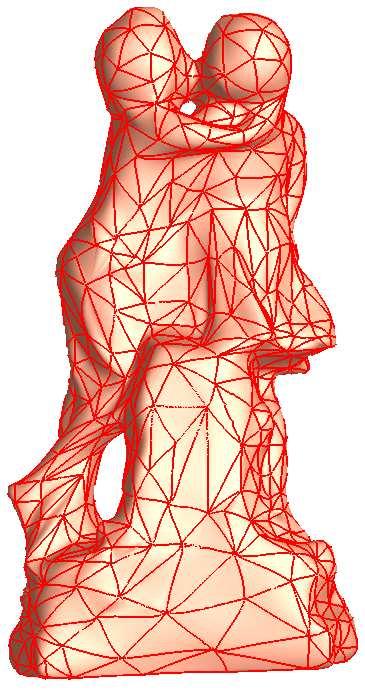
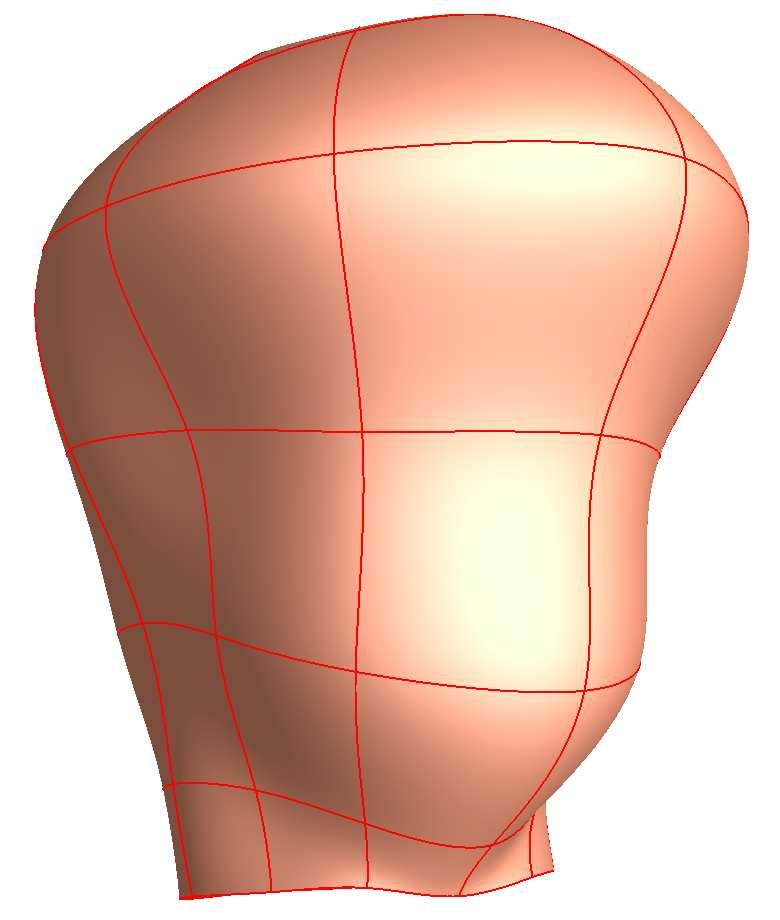
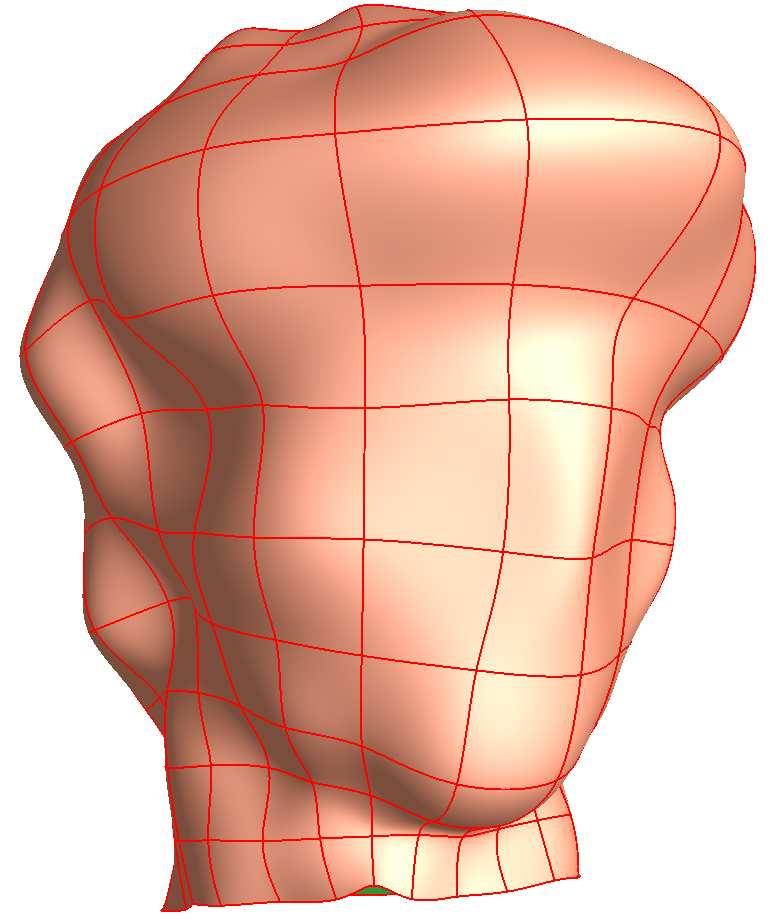
53 Hierarchical Surface Reconstruction N 3 c = 950 L 3 = 3.8% N 4 c = 2130 L 4 = 2.4% N 5 c = 5087 L 5 = 1.3% N 6 c = 7706 L 6 = 0.74%



54 Hierarchical Surface Reconstruction Figure: Close-up view of the reconstructed details
55 Examples
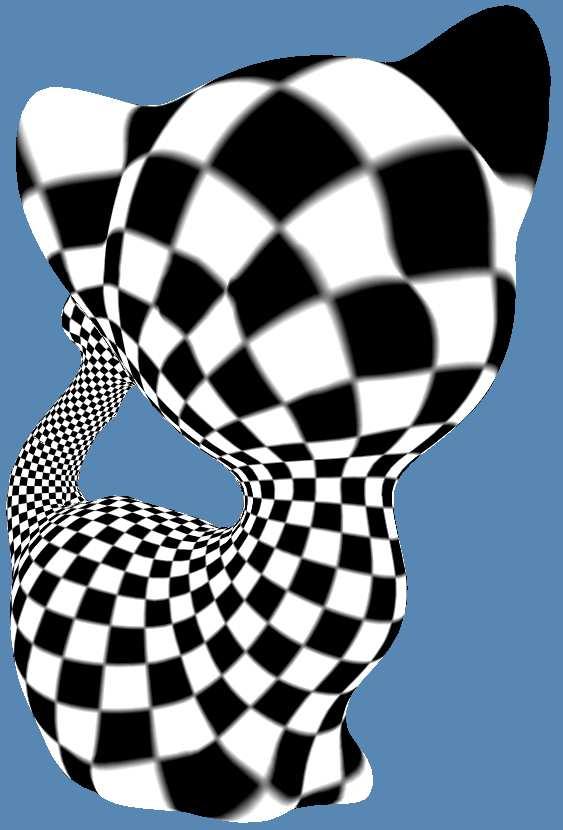
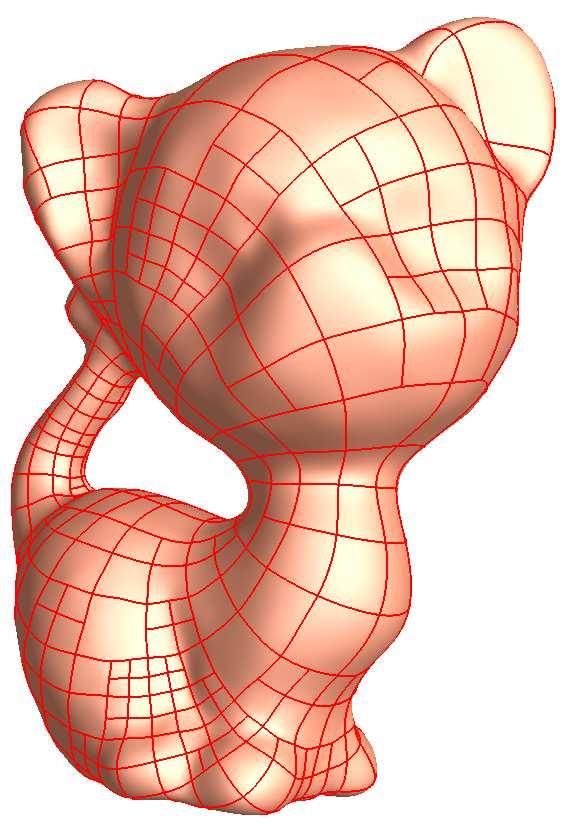
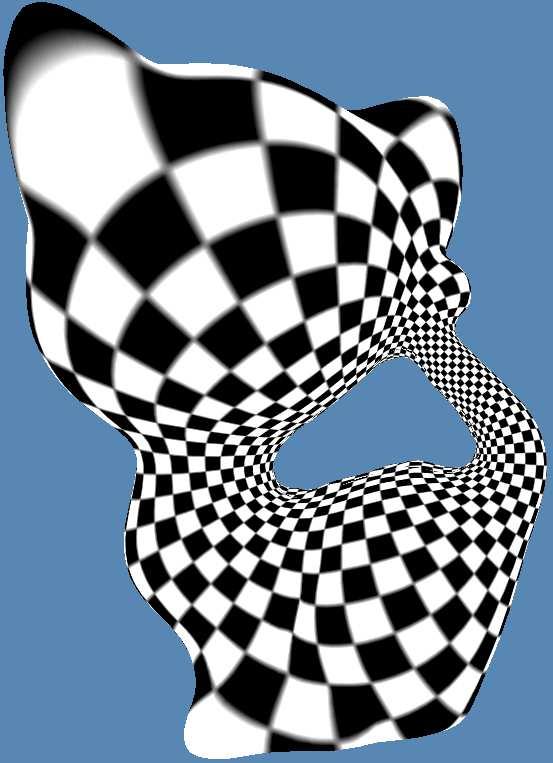
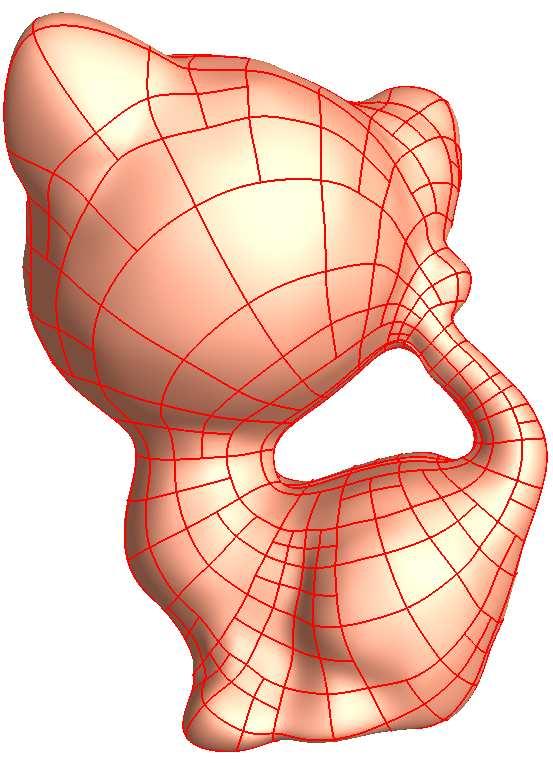
56 Examples
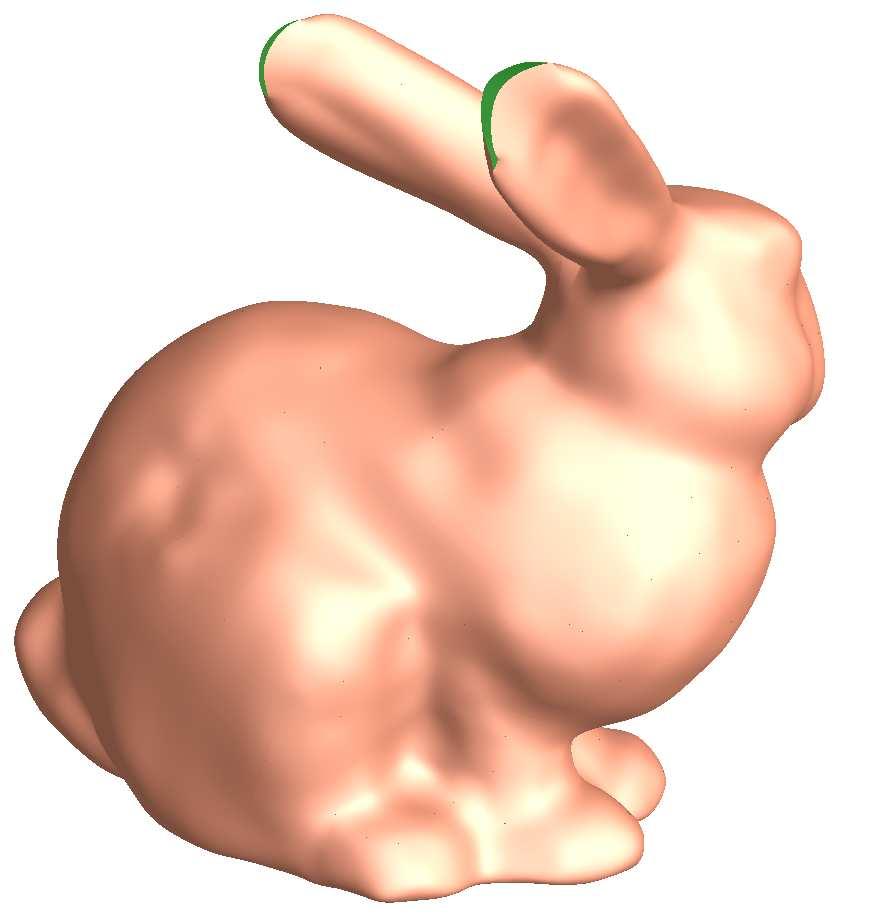
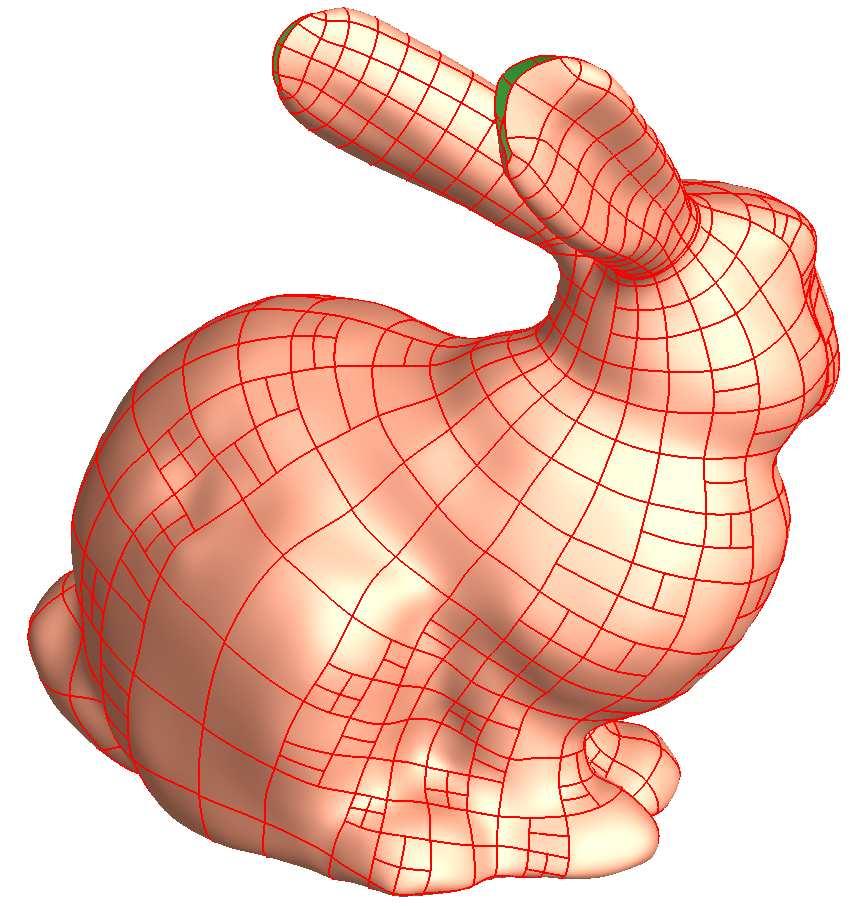
57 Examples

58 Examples
59 Examples
60 Statistics Table: Statistics of test cases. N p, # of points in the polygonal mesh; N c, # of control points; rms, root-mean-square error; L, maximal error. The execution time measures in minutes. Object N p N c rms L Time David 200, 000 7, % 0.74% 39m Bunny 34, 000 1, % 0.81% 18m Iphegenia 150, 000 9, % 0.46% 53m Rocker Arm 50, 000 2, % 0.36% 26m Kitten 40, % 0.44% 12m
61 Future Directions Manifold Splines with single singularity. Manifold Splines which are polynomials everywhere with C k continuity. Planar splines based on projective invariants.

62 Thanks For more information, please to Thank you!
Manifold splines. Xianfeng Gu, Ying He *, Hong Qin
 Graphical Models 68 (2006) 237 254 www.elsevier.com/locate/gmod Manifold splines Xianfeng Gu, Ying He *, Hong Qin Center for Visual Computing (CVC), Department of Computer Science, Stony Brook University,
Graphical Models 68 (2006) 237 254 www.elsevier.com/locate/gmod Manifold splines Xianfeng Gu, Ying He *, Hong Qin Center for Visual Computing (CVC), Department of Computer Science, Stony Brook University,
Manifold Splines. Abstract. 1 Introduction and Motivation. Ying He. Hong Qin. Xianfeng Gu Stony Brook University
 Xianfeng Gu Stony Brook University Manifold Splines Ying He Stony Brook University Hong Qin Stony Brook University Abstract Constructing splines whose parametric domain is an arbitrary manifold and effectively
Xianfeng Gu Stony Brook University Manifold Splines Ying He Stony Brook University Hong Qin Stony Brook University Abstract Constructing splines whose parametric domain is an arbitrary manifold and effectively
CONFORMAL SPHERICAL PARAMETRIZATION FOR HIGH GENUS SURFACES
 COMMUNICATIONS IN INFORMATION AND SYSTEMS c 2007 International Press Vol. 7, No. 3, pp. 273-286, 2007 004 CONFORMAL SPHERICAL PARAMETRIZATION FOR HIGH GENUS SURFACES WEI ZENG, XIN LI, SHING-TUNG YAU, AND
COMMUNICATIONS IN INFORMATION AND SYSTEMS c 2007 International Press Vol. 7, No. 3, pp. 273-286, 2007 004 CONFORMAL SPHERICAL PARAMETRIZATION FOR HIGH GENUS SURFACES WEI ZENG, XIN LI, SHING-TUNG YAU, AND
Polycube Splines. Abstract. 1 Introduction and Motivation. Hong Qin Stony Brook. Ying He NTU. Xianfeng Gu Stony Brook. Hongyu Wang Stony Brook
 Polycube Splines Hongyu Wang Stony Brook Ying He NTU Xin Li Stony Brook Xianfeng Gu Stony Brook Hong Qin Stony Brook (a) Conformal polycube map (b) Polycube T-spline (c) T-junctions on polycube spline(d)
Polycube Splines Hongyu Wang Stony Brook Ying He NTU Xin Li Stony Brook Xianfeng Gu Stony Brook Hong Qin Stony Brook (a) Conformal polycube map (b) Polycube T-spline (c) T-junctions on polycube spline(d)
Conformal Spherical Parametrization for High Genus Surfaces
 Conformal Spherical Parametrization for High Genus Surfaces Wei Zeng Chinese Academy of Sciences Stony Brook University Xin Li Stony Brook University Shing-Tung Yau Harvard University Xianfeng Gu Stony
Conformal Spherical Parametrization for High Genus Surfaces Wei Zeng Chinese Academy of Sciences Stony Brook University Xin Li Stony Brook University Shing-Tung Yau Harvard University Xianfeng Gu Stony
Computational Conformal Geometry and Its Applications
 Computational Conformal Geometry and Its Applications Wei Zeng Institute of Computing Technology Chinese Academy of Sciences zengwei@cs.sunysb.edu Thesis Proposal Advisor: Harry Shum Co-advisor: Xianfeng
Computational Conformal Geometry and Its Applications Wei Zeng Institute of Computing Technology Chinese Academy of Sciences zengwei@cs.sunysb.edu Thesis Proposal Advisor: Harry Shum Co-advisor: Xianfeng
Polycube splines. Hongyu Wang a, Ying He b,, Xin Li a, Xianfeng Gu a, Hong Qin a. 1. Introduction and motivation
 Computer-Aided Design 40 (2008) 721 733 www.elsevier.com/locate/cad Polycube splines Hongyu Wang a, Ying He b,, Xin Li a, Xianfeng Gu a, Hong Qin a a Computer Science Department, Stony Brook University,
Computer-Aided Design 40 (2008) 721 733 www.elsevier.com/locate/cad Polycube splines Hongyu Wang a, Ying He b,, Xin Li a, Xianfeng Gu a, Hong Qin a a Computer Science Department, Stony Brook University,
Geometric structures on 2-orbifolds
 Geometric structures on 2-orbifolds Section 1: Manifolds and differentiable structures S. Choi Department of Mathematical Science KAIST, Daejeon, South Korea 2010 Fall, Lectures at KAIST S. Choi (KAIST)
Geometric structures on 2-orbifolds Section 1: Manifolds and differentiable structures S. Choi Department of Mathematical Science KAIST, Daejeon, South Korea 2010 Fall, Lectures at KAIST S. Choi (KAIST)
Manifold Splines with Single Extraordinary Point
 Manifold Splines with Single Extraordinary Point Xianfeng Gu Stony Brook Ying He NTU Miao Jin Stony Brook Feng Luo Rutgers Hong Qin Stony Brook Shing-Tung Yau Harvard Abstract This paper develops a novel
Manifold Splines with Single Extraordinary Point Xianfeng Gu Stony Brook Ying He NTU Miao Jin Stony Brook Feng Luo Rutgers Hong Qin Stony Brook Shing-Tung Yau Harvard Abstract This paper develops a novel
Topic: Orientation, Surfaces, and Euler characteristic
 Topic: Orientation, Surfaces, and Euler characteristic The material in these notes is motivated by Chapter 2 of Cromwell. A source I used for smooth manifolds is do Carmo s Riemannian Geometry. Ideas of
Topic: Orientation, Surfaces, and Euler characteristic The material in these notes is motivated by Chapter 2 of Cromwell. A source I used for smooth manifolds is do Carmo s Riemannian Geometry. Ideas of
Polycube Splines. Hongyu Wang a, Ying He b,, Xin Li a, Xianfeng Gu a,hong Qin a, 1. Introduction and Motivation
 Polycube Splines Hongyu Wang a, Ying He b,, Xin Li a, Xianfeng Gu a,hong Qin a, a Computer Science Department, Stony Brook University, NY, USA. b School of Computer Engineering, Nanyang Technological University,
Polycube Splines Hongyu Wang a, Ying He b,, Xin Li a, Xianfeng Gu a,hong Qin a, a Computer Science Department, Stony Brook University, NY, USA. b School of Computer Engineering, Nanyang Technological University,
Meshless Modeling, Animating, and Simulating Point-Based Geometry
 Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Manifold Splines with Single Extraordinary Point
 Manifold Splines with Single Extraordinary Point Xianfeng Gu a,ying He b,,miaojin a,fengluo c, Hong Qin a, Shing-Tung Yau d a Computer Science Department, Stony Brook University, NY, USA. b School of Computer
Manifold Splines with Single Extraordinary Point Xianfeng Gu a,ying He b,,miaojin a,fengluo c, Hong Qin a, Shing-Tung Yau d a Computer Science Department, Stony Brook University, NY, USA. b School of Computer
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
COMPUTING SURFACE UNIFORMIZATION USING DISCRETE BELTRAMI FLOW
 COMPUTING SURFACE UNIFORMIZATION USING DISCRETE BELTRAMI FLOW Abstract. In this paper, we propose a novel algorithm for computing surface uniformization for surfaces with arbitrary topology. According
COMPUTING SURFACE UNIFORMIZATION USING DISCRETE BELTRAMI FLOW Abstract. In this paper, we propose a novel algorithm for computing surface uniformization for surfaces with arbitrary topology. According
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
CS Object Representation. Aditi Majumder, CS 112 Slide 1
 CS 112 - Object Representation Aditi Majumder, CS 112 Slide 1 What is Graphics? Modeling Computer representation of the 3D world Analysis For efficient rendering For catering the model to different applications..
CS 112 - Object Representation Aditi Majumder, CS 112 Slide 1 What is Graphics? Modeling Computer representation of the 3D world Analysis For efficient rendering For catering the model to different applications..
Parameterization of triangular meshes
 Parameterization of triangular meshes Michael S. Floater November 10, 2009 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to
Parameterization of triangular meshes Michael S. Floater November 10, 2009 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to
Introduction to geometry
 1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
Topological Data Analysis - I. Afra Zomorodian Department of Computer Science Dartmouth College
 Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
Topological Data Analysis - I Afra Zomorodian Department of Computer Science Dartmouth College September 3, 2007 1 Acquisition Vision: Images (2D) GIS: Terrains (3D) Graphics: Surfaces (3D) Medicine: MRI
Human Brain Mapping with Conformal Geometry and Multivariate Tensor-based Morphometry
 Human Brain Mapping with Conformal Geometry and Multivariate Tensor-based Morphometry Jie Shi 1, Paul M. Thompson 2, Yalin Wang 1 1 School of Computing, Informatics and Decision Systems Engineering, ASU,
Human Brain Mapping with Conformal Geometry and Multivariate Tensor-based Morphometry Jie Shi 1, Paul M. Thompson 2, Yalin Wang 1 1 School of Computing, Informatics and Decision Systems Engineering, ASU,
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
DISCRETE DIFFERENTIAL GEOMETRY
 AMS SHORT COURSE DISCRETE DIFFERENTIAL GEOMETRY Joint Mathematics Meeting San Diego, CA January 2018 DISCRETE CONFORMAL GEOMETRY AMS SHORT COURSE DISCRETE DIFFERENTIAL GEOMETRY Joint Mathematics Meeting
AMS SHORT COURSE DISCRETE DIFFERENTIAL GEOMETRY Joint Mathematics Meeting San Diego, CA January 2018 DISCRETE CONFORMAL GEOMETRY AMS SHORT COURSE DISCRETE DIFFERENTIAL GEOMETRY Joint Mathematics Meeting
3D Modeling Parametric Curves & Surfaces
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
274 Curves on Surfaces, Lecture 5
 274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
274 Curves on Surfaces, Lecture 5 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 5 Ideal polygons Previously we discussed three models of the hyperbolic plane: the Poincaré disk, the upper half-plane,
Surfaces Beyond Classification
 Chapter XII Surfaces Beyond Classification In most of the textbooks which present topological classification of compact surfaces the classification is the top result. However the topology of 2- manifolds
Chapter XII Surfaces Beyond Classification In most of the textbooks which present topological classification of compact surfaces the classification is the top result. However the topology of 2- manifolds
Geometric Modeling Mortenson Chapter 11. Complex Model Construction
 Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Discrete Surface Ricci Flow
 TO APPEAR IN IEEE TVCG 1 Discrete Surface Ricci Flow Miao Jin 1, Junho Kim 1,3,FengLuo 2, and Xianfeng Gu 1 1 Stony Brook University 2 Rutgers University 3 Dong-Eui University Abstract This work introduces
TO APPEAR IN IEEE TVCG 1 Discrete Surface Ricci Flow Miao Jin 1, Junho Kim 1,3,FengLuo 2, and Xianfeng Gu 1 1 Stony Brook University 2 Rutgers University 3 Dong-Eui University Abstract This work introduces
COMPUTING CONFORMAL INVARIANTS: PERIOD MATRICES
 COMMUNICATIONS IN INFORMATION AND SYSTEMS c 2004 International Press Vol. 3, No. 3, pp. 153-170, March 2004 001 COMPUTING CONFORMAL INVARIANTS: PERIOD MATRICES XIANFENG GU, YALIN WANG, AND SHING-TUNG YAU
COMMUNICATIONS IN INFORMATION AND SYSTEMS c 2004 International Press Vol. 3, No. 3, pp. 153-170, March 2004 001 COMPUTING CONFORMAL INVARIANTS: PERIOD MATRICES XIANFENG GU, YALIN WANG, AND SHING-TUNG YAU
Computing Geodesic Spectra of Surfaces
 Computing Geodesic Spectra of Surfaces Miao Jin Stony Brook University Feng Luo Rutgers University Shing-Tung Yau Harvard University Xianfeng Gu Stony Brook University Abstract Surface classification is
Computing Geodesic Spectra of Surfaces Miao Jin Stony Brook University Feng Luo Rutgers University Shing-Tung Yau Harvard University Xianfeng Gu Stony Brook University Abstract Surface classification is
Greedy Routing with Guaranteed Delivery Using Ricci Flow
 Greedy Routing with Guaranteed Delivery Using Ricci Flow Jie Gao Stony Brook University Joint work with Rik Sarkar, Xiaotian Yin, Wei Zeng, Feng Luo, Xianfeng David Gu Greedy Routing Assign coordinatesto
Greedy Routing with Guaranteed Delivery Using Ricci Flow Jie Gao Stony Brook University Joint work with Rik Sarkar, Xiaotian Yin, Wei Zeng, Feng Luo, Xianfeng David Gu Greedy Routing Assign coordinatesto
Flat Surfaces, Teichmueller Discs, Veech Groups, and the Veech Tessellation
 Flat Surfaces, Teichmueller Discs, Veech Groups, and the Veech Tessellation S. Allen Broughton - Rose-Hulman Institute of Technology Chris Judge - Indiana University AMS Regional Meeting at Pennsylvania
Flat Surfaces, Teichmueller Discs, Veech Groups, and the Veech Tessellation S. Allen Broughton - Rose-Hulman Institute of Technology Chris Judge - Indiana University AMS Regional Meeting at Pennsylvania
3D Modeling Parametric Curves & Surfaces. Shandong University Spring 2013
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
Three Points Make a Triangle Or a Circle
 Three Points Make a Triangle Or a Circle Peter Schröder joint work with Liliya Kharevych, Boris Springborn, Alexander Bobenko 1 In This Section Circles as basic primitive it s all about the underlying
Three Points Make a Triangle Or a Circle Peter Schröder joint work with Liliya Kharevych, Boris Springborn, Alexander Bobenko 1 In This Section Circles as basic primitive it s all about the underlying
Constrained Willmore Tori in the 4 Sphere
 (Technische Universität Berlin) 16 August 2006 London Mathematical Society Durham Symposium Methods of Integrable Systems in Geometry Constrained Willmore Surfaces The Main Result Strategy of Proof Constrained
(Technische Universität Berlin) 16 August 2006 London Mathematical Society Durham Symposium Methods of Integrable Systems in Geometry Constrained Willmore Surfaces The Main Result Strategy of Proof Constrained
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Generalized PolyCube Trivariate Splines
 Generalized PolyCube Trivariate Splines Bo Li Department of Computer Science Stony Brook University (SUNY) Stony Brook, New York, 11790 bli@cs.sunysb.edu Xin Li Department of Electrical & Computer Engineering
Generalized PolyCube Trivariate Splines Bo Li Department of Computer Science Stony Brook University (SUNY) Stony Brook, New York, 11790 bli@cs.sunysb.edu Xin Li Department of Electrical & Computer Engineering
Surfaces for CAGD. FSP Tutorial. FSP-Seminar, Graz, November
 Surfaces for CAGD FSP Tutorial FSP-Seminar, Graz, November 2005 1 Tensor Product Surfaces Given: two curve schemes (Bézier curves or B splines): I: x(u) = m i=0 F i(u)b i, u [a, b], II: x(v) = n j=0 G
Surfaces for CAGD FSP Tutorial FSP-Seminar, Graz, November 2005 1 Tensor Product Surfaces Given: two curve schemes (Bézier curves or B splines): I: x(u) = m i=0 F i(u)b i, u [a, b], II: x(v) = n j=0 G
Digital Geometry Processing Parameterization I
 Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Freeform Curves on Spheres of Arbitrary Dimension
 Freeform Curves on Spheres of Arbitrary Dimension Scott Schaefer and Ron Goldman Rice University 6100 Main St. Houston, TX 77005 sschaefe@rice.edu and rng@rice.edu Abstract Recursive evaluation procedures
Freeform Curves on Spheres of Arbitrary Dimension Scott Schaefer and Ron Goldman Rice University 6100 Main St. Houston, TX 77005 sschaefe@rice.edu and rng@rice.edu Abstract Recursive evaluation procedures
Discrete Ricci Flow and Its Applications
 Discrete Ricci Flow and Its Applications State University of New York 1 Motivation Ricci flow is a powerful tool for designing Riemannian metrics, which lays down the theoretic foundation for many crucial
Discrete Ricci Flow and Its Applications State University of New York 1 Motivation Ricci flow is a powerful tool for designing Riemannian metrics, which lays down the theoretic foundation for many crucial
Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology
 1 Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology Xin Li, Yunfan Bao, Xiaohu Guo, Miao Jin, Xianfeng Gu, and Hong Qin Abstract Computing smooth and optimal one-to-one maps between
1 Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology Xin Li, Yunfan Bao, Xiaohu Guo, Miao Jin, Xianfeng Gu, and Hong Qin Abstract Computing smooth and optimal one-to-one maps between
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
E. Vinberg, V. Kac, Quasi-homogeneous cones. (Russian) Mat. Zametki 1 (1967)
 Mat. Zametki 1 (1967)") Abstract Joint work with Gyeseon Lee Abstract: Real projective structures are given as projectively flat structures on manifolds or orbifolds. Hyperbolic structures form examples. Deforming hyperbolic
Abstract Joint work with Gyeseon Lee Abstract: Real projective structures are given as projectively flat structures on manifolds or orbifolds. Hyperbolic structures form examples. Deforming hyperbolic
Dynamic Points: When Geometry Meets Physics. Xiaohu Guo Stony Brook
 Dynamic Points: When Geometry Meets Physics Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Point Based Graphics Pipeline Acquisition Modeling Rendering laser scanning
Dynamic Points: When Geometry Meets Physics Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Point Based Graphics Pipeline Acquisition Modeling Rendering laser scanning
2D Spline Curves. CS 4620 Lecture 18
 2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
2D Spline Curves CS 4620 Lecture 18 2014 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes that is, without discontinuities So far we can make things with corners (lines,
From isothermic triangulated surfaces to discrete holomorphicity
 From isothermic triangulated surfaces to discrete holomorphicity Wai Yeung Lam TU Berlin Oberwolfach, 2 March 2015 Joint work with Ulrich Pinkall Wai Yeung Lam (TU Berlin) isothermic triangulated surfaces
From isothermic triangulated surfaces to discrete holomorphicity Wai Yeung Lam TU Berlin Oberwolfach, 2 March 2015 Joint work with Ulrich Pinkall Wai Yeung Lam (TU Berlin) isothermic triangulated surfaces
Automated Surface Matching using Mutual Information Applied to Riemann Surface Structures
 Automated Surface Matching using Mutual Information Applied to Riemann Surface Structures Yalin Wang 1, Ming-Chang Chiang 2, and Paul M. Thompson 2 1 Mathematics Department, UCLA, Los Angeles, CA 90095,
Automated Surface Matching using Mutual Information Applied to Riemann Surface Structures Yalin Wang 1, Ming-Chang Chiang 2, and Paul M. Thompson 2 1 Mathematics Department, UCLA, Los Angeles, CA 90095,
Geometric Methods in Engineering Applications
 1 Geometric Methods in Engineering Applications Xianfeng Gu Yalin Wang Hsiao-Bing Cheng Li-Tien Cheng and Shing-Tung Yau Computer Science Mathematics Mathematics Mathematics Mathematics Stony Brook University
1 Geometric Methods in Engineering Applications Xianfeng Gu Yalin Wang Hsiao-Bing Cheng Li-Tien Cheng and Shing-Tung Yau Computer Science Mathematics Mathematics Mathematics Mathematics Stony Brook University
Introduction to Computational Manifolds and Applications
 IMPA - Instituto de Matemática Pura e Aplicada, Rio de Janeiro, RJ, Brazil Introduction to Computational Manifolds and Applications Part 1 - Foundations Prof. Jean Gallier jean@cis.upenn.edu Department
IMPA - Instituto de Matemática Pura e Aplicada, Rio de Janeiro, RJ, Brazil Introduction to Computational Manifolds and Applications Part 1 - Foundations Prof. Jean Gallier jean@cis.upenn.edu Department
Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology
 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS 1 Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology Xin Li, Yunfan Bao, Xiaohu Guo, Miao Jin, Xianfeng Gu, and Hong Qin Abstract
IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS 1 Globally Optimal Surface Mapping for Surfaces with Arbitrary Topology Xin Li, Yunfan Bao, Xiaohu Guo, Miao Jin, Xianfeng Gu, and Hong Qin Abstract
Rational Bezier Curves
 Rational Bezier Curves Use of homogeneous coordinates Rational spline curve: define a curve in one higher dimension space, project it down on the homogenizing variable Mathematical formulation: n P(u)
Rational Bezier Curves Use of homogeneous coordinates Rational spline curve: define a curve in one higher dimension space, project it down on the homogenizing variable Mathematical formulation: n P(u)
CS354 Computer Graphics Rotations and Quaternions
 Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Slide Credit: Don Fussell CS354 Computer Graphics Rotations and Quaternions Qixing Huang April 4th 2018 Orientation Position and Orientation The position of an object can be represented as a translation
Symmetric Conformal Mapping for Surface Matching and Registration
 International Journal of CAD/CAM Vol. 9, No. 1, pp. 103~109 (2009) Symmetric Conformal Mapping for Surface Matching and Registration Wei Zeng 1, 2, Jing Hua 1, and Xianfeng David Gu 2 1Computer Science
International Journal of CAD/CAM Vol. 9, No. 1, pp. 103~109 (2009) Symmetric Conformal Mapping for Surface Matching and Registration Wei Zeng 1, 2, Jing Hua 1, and Xianfeng David Gu 2 1Computer Science
Greedy Routing in Wireless Networks. Jie Gao Stony Brook University
 Greedy Routing in Wireless Networks Jie Gao Stony Brook University A generic sensor node CPU. On-board flash memory or external memory Sensors: thermometer, camera, motion, light sensor, etc. Wireless
Greedy Routing in Wireless Networks Jie Gao Stony Brook University A generic sensor node CPU. On-board flash memory or external memory Sensors: thermometer, camera, motion, light sensor, etc. Wireless
Parameterization. Michael S. Floater. November 10, 2011
 Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass
 Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Tutorial 3 Comparing Biological Shapes Patrice Koehl and Joel Hass University of California, Davis, USA http://www.cs.ucdavis.edu/~koehl/ims2017/ What is a shape? A shape is a 2-manifold with a Riemannian
Curves and Surfaces for Computer-Aided Geometric Design
 Curves and Surfaces for Computer-Aided Geometric Design A Practical Guide Fourth Edition Gerald Farin Department of Computer Science Arizona State University Tempe, Arizona /ACADEMIC PRESS I San Diego
Curves and Surfaces for Computer-Aided Geometric Design A Practical Guide Fourth Edition Gerald Farin Department of Computer Science Arizona State University Tempe, Arizona /ACADEMIC PRESS I San Diego
THE UNIFORMIZATION THEOREM AND UNIVERSAL COVERS
 THE UNIFORMIZATION THEOREM AND UNIVERSAL COVERS PETAR YANAKIEV Abstract. This paper will deal with the consequences of the Uniformization Theorem, which is a major result in complex analysis and differential
THE UNIFORMIZATION THEOREM AND UNIVERSAL COVERS PETAR YANAKIEV Abstract. This paper will deal with the consequences of the Uniformization Theorem, which is a major result in complex analysis and differential
Multiresolution Computation of Conformal Structures of Surfaces
 Multiresolution Computation of Conformal Structures of Surfaces Xianfeng Gu Yalin Wang Shing-Tung Yau Division of Engineering and Applied Science, Harvard University, Cambridge, MA 0138 Mathematics Department,
Multiresolution Computation of Conformal Structures of Surfaces Xianfeng Gu Yalin Wang Shing-Tung Yau Division of Engineering and Applied Science, Harvard University, Cambridge, MA 0138 Mathematics Department,
Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry
 Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry Representation Ab initio design Rendering Solid modelers Kinematic
Introduction p. 1 What Is Geometric Modeling? p. 1 Computer-aided geometric design Solid modeling Algebraic geometry Computational geometry Representation Ab initio design Rendering Solid modelers Kinematic
Brain Surface Conformal Spherical Mapping
 Brain Surface Conformal Spherical Mapping Min Zhang Department of Industrial Engineering, Arizona State University mzhang33@asu.edu Abstract It is well known and proved that any genus zero surface can
Brain Surface Conformal Spherical Mapping Min Zhang Department of Industrial Engineering, Arizona State University mzhang33@asu.edu Abstract It is well known and proved that any genus zero surface can
HOMEOMORPHISMS OF 3-MANIFOLDS AND THE REALIZATION OF NIELSEN NUMBER
 COMMUNICATIONS IN ANALYSIS AND GEOMETRY Volume 9, Number 4, 825-877, 2001 HOMEOMORPHISMS OF 3-MANIFOLDS AND THE REALIZATION OF NIELSEN NUMBER Boju Jiang 1, Shicheng Wang 1,2, and Ying-Qing Wu 2 Abstract.
COMMUNICATIONS IN ANALYSIS AND GEOMETRY Volume 9, Number 4, 825-877, 2001 HOMEOMORPHISMS OF 3-MANIFOLDS AND THE REALIZATION OF NIELSEN NUMBER Boju Jiang 1, Shicheng Wang 1,2, and Ying-Qing Wu 2 Abstract.
Two Connections between Combinatorial and Differential Geometry
 Two Connections between Combinatorial and Differential Geometry John M. Sullivan Institut für Mathematik, Technische Universität Berlin Berlin Mathematical School DFG Research Group Polyhedral Surfaces
Two Connections between Combinatorial and Differential Geometry John M. Sullivan Institut für Mathematik, Technische Universität Berlin Berlin Mathematical School DFG Research Group Polyhedral Surfaces
2D Spline Curves. CS 4620 Lecture 13
 2D Spline Curves CS 4620 Lecture 13 2008 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes [Boeing] that is, without discontinuities So far we can make things with corners
2D Spline Curves CS 4620 Lecture 13 2008 Steve Marschner 1 Motivation: smoothness In many applications we need smooth shapes [Boeing] that is, without discontinuities So far we can make things with corners
Conformal Surface Parameterization Using Euclidean Ricci Flow
 Conformal Surface Parameterization Using Euclidean Ricci Flow Miao Jin, Juhno Kim, Feng Luo, Seungyong Lee, Xianfeng Gu Rutgers University Pohang University of Science and Technology State University of
Conformal Surface Parameterization Using Euclidean Ricci Flow Miao Jin, Juhno Kim, Feng Luo, Seungyong Lee, Xianfeng Gu Rutgers University Pohang University of Science and Technology State University of
Shape-based Diffeomorphic Registration on Hippocampal Surfaces Using Beltrami Holomorphic Flow
 Shape-based Diffeomorphic Registration on Hippocampal Surfaces Using Beltrami Holomorphic Flow Abstract. Finding meaningful 1-1 correspondences between hippocampal (HP) surfaces is an important but difficult
Shape-based Diffeomorphic Registration on Hippocampal Surfaces Using Beltrami Holomorphic Flow Abstract. Finding meaningful 1-1 correspondences between hippocampal (HP) surfaces is an important but difficult
Curves-on-Surface: A General Shape Comparison Framework
 Curves-on-Surface: A General Shape Comparison Framework Xin Li Ying He Xianfeng Gu Hong Qin Stony Brook University, Stony Brook, NY 11794, USA {xinli, yhe, gu, qin}@cs.sunysb.edu Abstract We develop a
Curves-on-Surface: A General Shape Comparison Framework Xin Li Ying He Xianfeng Gu Hong Qin Stony Brook University, Stony Brook, NY 11794, USA {xinli, yhe, gu, qin}@cs.sunysb.edu Abstract We develop a
Embedded graphs. Sasha Patotski. Cornell University November 24, 2014
 Embedded graphs Sasha Patotski Cornell University ap744@cornell.edu November 24, 2014 Sasha Patotski (Cornell University) Embedded graphs November 24, 2014 1 / 11 Exercise Embed K 6 and K 7 into a torus.
Embedded graphs Sasha Patotski Cornell University ap744@cornell.edu November 24, 2014 Sasha Patotski (Cornell University) Embedded graphs November 24, 2014 1 / 11 Exercise Embed K 6 and K 7 into a torus.
Dynamics on some Z 2 -covers of half-translation surfaces
 Dynamics on some Z 2 -covers of half-translation surfaces Chris Johnson Clemson University April 27, 2011 Outline Background The windtree model HLT s recurrence result The folded plane Panov s density
Dynamics on some Z 2 -covers of half-translation surfaces Chris Johnson Clemson University April 27, 2011 Outline Background The windtree model HLT s recurrence result The folded plane Panov s density
Implicit Matrix Representations of Rational Bézier Curves and Surfaces
 Implicit Matrix Representations of Rational Bézier Curves and Surfaces Laurent Busé INRIA Sophia Antipolis, France Laurent.Buse@inria.fr GD/SPM Conference, Denver, USA November 11, 2013 Overall motivation
Implicit Matrix Representations of Rational Bézier Curves and Surfaces Laurent Busé INRIA Sophia Antipolis, France Laurent.Buse@inria.fr GD/SPM Conference, Denver, USA November 11, 2013 Overall motivation
Cannon s conjecture, subdivision rules, and expansion complexes
 Cannon s conjecture, subdivision rules, and expansion complexes W. Floyd (joint work with J. Cannon and W. Parry) Department of Mathematics Virginia Tech UNC Greensboro: November, 2014 Motivation from
Cannon s conjecture, subdivision rules, and expansion complexes W. Floyd (joint work with J. Cannon and W. Parry) Department of Mathematics Virginia Tech UNC Greensboro: November, 2014 Motivation from
The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a
 The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a coordinate system and then the measuring of the point with
The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a coordinate system and then the measuring of the point with
Pythagorean - Hodograph Curves: Algebra and Geometry Inseparable
 Rida T. Farouki Pythagorean - Hodograph Curves: Algebra and Geometry Inseparable With 204 Figures and 15 Tables 4y Springer Contents 1 Introduction 1 1.1 The Lure of Analytic Geometry 1 1.2 Symbiosis of
Rida T. Farouki Pythagorean - Hodograph Curves: Algebra and Geometry Inseparable With 204 Figures and 15 Tables 4y Springer Contents 1 Introduction 1 1.1 The Lure of Analytic Geometry 1 1.2 Symbiosis of
Lecture notes for Topology MMA100
 Lecture notes for Topology MMA100 J A S, S-11 1 Simplicial Complexes 1.1 Affine independence A collection of points v 0, v 1,..., v n in some Euclidean space R N are affinely independent if the (affine
Lecture notes for Topology MMA100 J A S, S-11 1 Simplicial Complexes 1.1 Affine independence A collection of points v 0, v 1,..., v n in some Euclidean space R N are affinely independent if the (affine
Bezier Curves, B-Splines, NURBS
 Bezier Curves, B-Splines, NURBS Example Application: Font Design and Display Curved objects are everywhere There is always need for: mathematical fidelity high precision artistic freedom and flexibility
Bezier Curves, B-Splines, NURBS Example Application: Font Design and Display Curved objects are everywhere There is always need for: mathematical fidelity high precision artistic freedom and flexibility
Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary?
 Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary? Is the converse true? What happens in the classical special case?
Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary? Is the converse true? What happens in the classical special case?
Brain Surface Conformal Parameterization with Algebraic Functions
 Brain Surface Conformal Parameterization with Algebraic Functions Yalin Wang 1,2, Xianfeng Gu 3, Tony F. Chan 1, Paul M. Thompson 2, and Shing-Tung Yau 4 1 Mathematics Department, UCLA, Los Angeles, CA
Brain Surface Conformal Parameterization with Algebraic Functions Yalin Wang 1,2, Xianfeng Gu 3, Tony F. Chan 1, Paul M. Thompson 2, and Shing-Tung Yau 4 1 Mathematics Department, UCLA, Los Angeles, CA
Parameterization of Star-Shaped Volumes Using Green s Functions
 Parameterization of Star-Shaped Volumes Using Green s Functions Jiazhi Xia a, Ying He a, Shuchu Han a, Chi-Wing Fu a, Feng Luo b, and Xianfeng Gu c a School of Computer Engineering, Nanyang Technological
Parameterization of Star-Shaped Volumes Using Green s Functions Jiazhi Xia a, Ying He a, Shuchu Han a, Chi-Wing Fu a, Feng Luo b, and Xianfeng Gu c a School of Computer Engineering, Nanyang Technological
A Construction of Rational Manifold Surfaces of Arbitrary Topology and Smoothness from Triangular Meshes
 Manuscript A Construction of Rational Manifold Surfaces of Arbitrary Topology and Smoothness from Triangular Meshes Giovanni Della Vecchia, Bert Jüttler a and Myung-Soo Kim b a Johannes Kepler University
Manuscript A Construction of Rational Manifold Surfaces of Arbitrary Topology and Smoothness from Triangular Meshes Giovanni Della Vecchia, Bert Jüttler a and Myung-Soo Kim b a Johannes Kepler University
Mathematical Research Letters 1, (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS. Feng Luo
 MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS. Feng Luo") Mathematical Research Letters 1, 257 261 (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS Feng Luo Abstract. We show that for any given angle α (0, 2π), any closed 3- manifold has a Möbius cone
Mathematical Research Letters 1, 257 261 (1994) MÖBIUS CONE STRUCTURES ON 3-DIMENSIONAL MANIFOLDS Feng Luo Abstract. We show that for any given angle α (0, 2π), any closed 3- manifold has a Möbius cone
Fathi El-Yafi Project and Software Development Manager Engineering Simulation
 An Introduction to Geometry Design Algorithms Fathi El-Yafi Project and Software Development Manager Engineering Simulation 1 Geometry: Overview Geometry Basics Definitions Data Semantic Topology Mathematics
An Introduction to Geometry Design Algorithms Fathi El-Yafi Project and Software Development Manager Engineering Simulation 1 Geometry: Overview Geometry Basics Definitions Data Semantic Topology Mathematics
Barycentric Coordinates and Parameterization
 Barycentric Coordinates and Parameterization Center of Mass Geometric center of object Center of Mass Geometric center of object Object can be balanced on CoM How to calculate? Finding the Center of Mass
Barycentric Coordinates and Parameterization Center of Mass Geometric center of object Center of Mass Geometric center of object Object can be balanced on CoM How to calculate? Finding the Center of Mass
Introduction to Riemann surfaces, moduli spaces and its applications
 Introduction to Riemann surfaces, moduli spaces and its applications Oscar Brauer M2, Mathematical Physics Outline 1. Introduction to Moduli Spaces 1.1 Moduli of Lines 1.2 Line Bundles 2. Moduli space
Introduction to Riemann surfaces, moduli spaces and its applications Oscar Brauer M2, Mathematical Physics Outline 1. Introduction to Moduli Spaces 1.1 Moduli of Lines 1.2 Line Bundles 2. Moduli space
Surface Parameterization
 Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
The Convex Hull of a Space Curve. Bernd Sturmfels, UC Berkeley (two papers with Kristian Ranestad)
") The Convex Hull of a Space Curve Bernd Sturmfels, UC Berkeley (two papers with Kristian Ranestad) Convex Hull of a Trigonometric Curve { (cos(θ), sin(2θ), cos(3θ) ) R 3 : θ [0, 2π] } = { (x, y, z) R 3
The Convex Hull of a Space Curve Bernd Sturmfels, UC Berkeley (two papers with Kristian Ranestad) Convex Hull of a Trigonometric Curve { (cos(θ), sin(2θ), cos(3θ) ) R 3 : θ [0, 2π] } = { (x, y, z) R 3
Optimal Möbius Transformation for Information Visualization and Meshing
 Optimal Möbius Transformation for Information Visualization and Meshing Marshall Bern Xerox Palo Alto Research Ctr. David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science
Optimal Möbius Transformation for Information Visualization and Meshing Marshall Bern Xerox Palo Alto Research Ctr. David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science
Tripod Configurations
 Tripod Configurations Eric Chen, Nick Lourie, Nakul Luthra Summer@ICERM 2013 August 8, 2013 Eric Chen, Nick Lourie, Nakul Luthra (S@I) Tripod Configurations August 8, 2013 1 / 33 Overview 1 Introduction
Tripod Configurations Eric Chen, Nick Lourie, Nakul Luthra Summer@ICERM 2013 August 8, 2013 Eric Chen, Nick Lourie, Nakul Luthra (S@I) Tripod Configurations August 8, 2013 1 / 33 Overview 1 Introduction
Geometric Queries for Ray Tracing
 CSCI 420 Computer Graphics Lecture 16 Geometric Queries for Ray Tracing Ray-Surface Intersection Barycentric Coordinates [Angel Ch. 11] Jernej Barbic University of Southern California 1 Ray-Surface Intersections
CSCI 420 Computer Graphics Lecture 16 Geometric Queries for Ray Tracing Ray-Surface Intersection Barycentric Coordinates [Angel Ch. 11] Jernej Barbic University of Southern California 1 Ray-Surface Intersections
Translation surfaces: saddle connections, triangles and covering constructions
 Translation surfaces: saddle connections, triangles and covering constructions Chenxi Wu Cornell University July 29, 2016 Translation surfaces A (compact) translation surface is: a compact surface with
Translation surfaces: saddle connections, triangles and covering constructions Chenxi Wu Cornell University July 29, 2016 Translation surfaces A (compact) translation surface is: a compact surface with
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
Curve and Surface Basics
 Curve and Surface Basics Implicit and parametric forms Power basis form Bezier curves Rational Bezier Curves Tensor Product Surfaces ME525x NURBS Curve and Surface Modeling Page 1 Implicit and Parametric
Curve and Surface Basics Implicit and parametric forms Power basis form Bezier curves Rational Bezier Curves Tensor Product Surfaces ME525x NURBS Curve and Surface Modeling Page 1 Implicit and Parametric
Algebra II: Review Exercises
 : Review Exercises These notes reflect material from our text, A First Course in Abstract Algebra, Seventh Edition, by John B. Fraleigh, published by Addison-Wesley, 2003. Chapter 7. Advanced Group Theory
: Review Exercises These notes reflect material from our text, A First Course in Abstract Algebra, Seventh Edition, by John B. Fraleigh, published by Addison-Wesley, 2003. Chapter 7. Advanced Group Theory
Lecture IV Bézier Curves
 Lecture IV Bézier Curves Why Curves? Why Curves? Why Curves? Why Curves? Why Curves? Linear (flat) Curved Easier More pieces Looks ugly Complicated Fewer pieces Looks smooth What is a curve? Intuitively:
Lecture IV Bézier Curves Why Curves? Why Curves? Why Curves? Why Curves? Why Curves? Linear (flat) Curved Easier More pieces Looks ugly Complicated Fewer pieces Looks smooth What is a curve? Intuitively:
GEOMETRIC LIBRARY. Maharavo Randrianarivony
 GEOMETRIC LIBRARY Maharavo Randrianarivony During the last four years, I have maintained a numerical geometric library. The constituting routines, which are summarized in the following list, are implemented
GEOMETRIC LIBRARY Maharavo Randrianarivony During the last four years, I have maintained a numerical geometric library. The constituting routines, which are summarized in the following list, are implemented
Spline Thin-Shell Simulation of Manifold Surfaces
 Spline Thin-Shell Simulation of Manifold Surfaces Kexiang Wang, Ying He, Xiaohu Guo, and Hong Qin Department of Computer Science Stony Brook University Stony Brook, NY 11790-4400, USA {kwang, yhe, xguo,
Spline Thin-Shell Simulation of Manifold Surfaces Kexiang Wang, Ying He, Xiaohu Guo, and Hong Qin Department of Computer Science Stony Brook University Stony Brook, NY 11790-4400, USA {kwang, yhe, xguo,
Lecture 0: Reivew of some basic material
 Lecture 0: Reivew of some basic material September 12, 2018 1 Background material on the homotopy category We begin with the topological category TOP, whose objects are topological spaces and whose morphisms
Lecture 0: Reivew of some basic material September 12, 2018 1 Background material on the homotopy category We begin with the topological category TOP, whose objects are topological spaces and whose morphisms
CS-184: Computer Graphics. Today
 CS-84: Computer Graphics Lecture #5: Curves and Surfaces Prof. James O Brien University of California, Berkeley V25F-5-. Today General curve and surface representations Splines and other polynomial bases
CS-84: Computer Graphics Lecture #5: Curves and Surfaces Prof. James O Brien University of California, Berkeley V25F-5-. Today General curve and surface representations Splines and other polynomial bases
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia
 Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed