Creation of LoD1 Buildings Using Volunteered Photographs and OpenStreetMap Vector Data
|
|
|
- Pamela Hunt
- 6 years ago
- Views:
Transcription

1 Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Creation of LoD1 Buildings Using Volunteered Photographs and OpenStreetMap Vector Data Eliana Bshouty Sagi Dalyot
2 Outline Introduction Research Goals Methodology Field Experiments and Results Conclusions and Future Work


3 Introduction - 3D City Models 3D city models become increasingly popular among urban planners : o Noise and environmental analyses o Disaster management o Architecture and city planning bcgis.com Level of Detail LOD1
.")

4 Introduction - Volunteered Geographic Information VGI: Thousands of humans acting as remote sensors (Goodchild, 2007). Groups of people can collect geographic data that is either difficult to automate or expensive to implement. GOODCHILD, California, 2007 Map creation by walking or driving using smartphones (GPS trajectories) OSM Aerial/satellite imagery digitizing



5 Introduction OSM OpenStreetMap - One of the most famous examples of crowdsourcing VGI maps with more than 3.1 million users. More than 6.5 million building 2D footprints, increasing by 1% monthly. Yet, only 1.4% of OSM buildings have height data. OSM 3D - Buildings in Heidelberg, Germany
6 Research Goals Investigate whether collective imagery contributed by users (WWW) can be used to produce LoD1 information. Extract accurate building heights from single perspective images. Produce 3D building models (LoD1) in OSM.
7 Methodology Input Data Building height calculation Vanishing points detection Building footprint calculation Calculating camera internal parameters Corresponding building in OSM -> LoD1

8 Input Data Perspective Building Images Manhattan-world assumption: the imaged scene contains three orthogonal, dominant directions, typically corresponding to the X, Y, and Z axes. EXIF - Exchangeable Image File format : Geotagging most cameras and smart phones have a built-in GPS receiver that stores location information [lat,long] [X,Y] Focal length [pixel] Image size [pixel]
9 Input Data Methodology Building height calculation Vanishing points detection Building footprint calculation Calculating camera internal parameters Corresponding building in OSM -> LoD1


.")
10 Orthogonal Vanishing Points Detection Automatically detect the 3 vanishing points based on the Manhattan-world assumption (orthogonality). Flickr derivativesinvesting.net



11 Orthogonal Vanishing Points Detection Several methods for vanishing point detection make use of the line segments detected in images. Source: Simon, Fond, Berger. Eurographics 2016
12 Input Data Methodology Building height calculation Vanishing points detection Building footprint calculation Calculating camera internal parameters Corresponding building in OSM -> LoD1

13 Camera Internal Parameters EXIF : Assume principle point is at image center: Focal length in pixels : Vanishing points : Camera principal point [u0,v0] is at the orthocenter of the triangle, which has the vanishing points as its vertices. Focal length is estimated using: V3 V1 V2
14 Input Data Methodology Building height calculation Vanishing points detection Building footprint calculation Calculating camera internal parameters Corresponding building in OSM -> LoD1


15 Building Height Calculation: Single View Metrology o Single view metrology is used to calculate height in the real world. o Cross ratio is preserved by the projective transformation of a projective line.



16 Building Height Calculation: Cross Ratio o Horizon line - Projection of the line at infinity of the reference plane into the image [v1,v2]. o Vertical point - A point at infinity in the reference direction [v3]. o Reference - height in meter FIG WW 2017 / 29 May 2 June 2017, Helsinki, Finland
17 Building Height Calculation - Example Building height is m - measured by total station (±2 cm). Reference [m] Calculated Building Height [m] Error [m] Stop sign Pedestrian a Pedestrian b
18 Input Data Methodology Building height calculation Vanishing points detection Building footprint calculation Calculating camera internal parameters Corresponding building in OSM -> LoD1

19 Building footprint - Homography Projective Affine l1 & l2 are Horizon line parameters Similarity & are function of the internal parameters S building height in pixel building height in meter Scaling, Rotation & Translation
20 Building footprint: Homography Results a b h h Image to World
21 Field Experiments and Results - Height Building Measured Calculated Difference b b b b1 b2 b3
22 Field Experiments and Results - Footprint Building footprints were measured using a tape (±5 cm) Calculated via focal Calculated via Difference Measured length EXIF focal length Focal EXIF A [m] B [m] A [m] B [m] A [m] B [m] A [m] B [m] A [m] B [m] b1 b2 b3





23 Field Experiments and Results - LoD1 b1 b2 b3
24 Input Data Methodology Building height calculation Vanishing points detection Building footprint calculation Calculating camera internal parameters Corresponding building in OSM -> LoD1


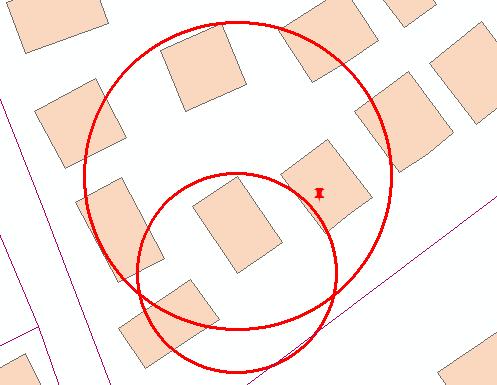
25 Corresponding building in OSM o Estimate the distances from the building corners using the intersections with the vanishing line B A DP3 DP1 DP2
 + Error (5 m) o")

26 Corresponding building in OSM Step 1 o Circular buffer with radius = Dp2 + GPS Accuracy (10 m) + Error (5 m) o The circle center is the GPS coordinates from the EXIF data If there is only one building inside the buffer - Stop search!

![Dif_A [m] Dif_B [m] 1-1.00 1.00 2 1.87 6.96 3 0.30-14.](/docs-images/76/73701700/images/27-4.jpg "80 Buildings Dif_A [m] Dif_B [m] 1 2.01 4.59 2 3.24 2.95 3 5.54 3.39 4 5.")
27 Corresponding building in OSM Step 2 o Compare between the footprints: keep the building with difference bellow 5 [m] for both A & B Buildings Dif_A [m] Dif_B [m] Buildings Dif_A [m] Dif_B [m]





28 Corresponding building in OSM Step 3 o Circular buffer with radius of Dp1 & Dp3 o The circles centers are the 2 corners Dp3 B A Dp1 A B Dp1 Dp3



29 Corresponding building in OSM Step 3 o The closest point to the GPS position X where the image has been taken in the field The difference between X and the nearst intersection point is less than 4 meters
30 Conclusions Using user-generated contributed single image was found valuable to calculate and extract building height and footprint data. Algorithms developed are qualitative in calculating LoD1 building values with less than 1.00 m errors (for most cases) to generate 3D city models (reducing cost and work labor). Using accurate reference height is important, although errors are still in the range of desired output. Automatically Identifying and updating height data in corresponding building feature in OSM.
31 Future Work Analyze methodology and algorithms on more WWW building images. Update building footprints in OSM. Analyze more complex building shapes and footprints. Implement a GUI/app for photographers to automatically update OSM with building height data.
32 Thank you! Eliana Bshouty Sagi Dalyot
Single-view metrology
 Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Scene Modeling for a Single View
 on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
More Single View Geometry
 More Single View Geometry 5-463: Rendering and Image rocessing Alexei Efros with a lot of slides stolen from Steve Seitz and Antonio Criminisi Quiz! Image B Image A Image C How can we model this scene?.
More Single View Geometry 5-463: Rendering and Image rocessing Alexei Efros with a lot of slides stolen from Steve Seitz and Antonio Criminisi Quiz! Image B Image A Image C How can we model this scene?.
Chapters 1-4: Summary
 Chapters 1-4: Summary So far, we have been investigating the image acquisition process. Chapter 1: General introduction Chapter 2: Radiation source and properties Chapter 3: Radiation interaction with
Chapters 1-4: Summary So far, we have been investigating the image acquisition process. Chapter 1: General introduction Chapter 2: Radiation source and properties Chapter 3: Radiation interaction with
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Perspective Projection [2 pts]
![Perspective Projection [2 pts]](/thumbs/77/75160998.jpg "Perspective Projection [2 pts]") Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
Instructions: CSE252a Computer Vision Assignment 1 Instructor: Ben Ochoa Due: Thursday, October 23, 11:59 PM Submit your assignment electronically by email to iskwak+252a@cs.ucsd.edu with the subject line
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Agenda. Perspective projection. Rotations. Camera models
 Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
Image formation Agenda Perspective projection Rotations Camera models Light as a wave + particle Light as a wave (ignore for now) Refraction Diffraction Image formation Digital Image Film Human eye Pixel
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera model and multiple view geometry
 Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
Chapter Camera model and multiple view geometry Before discussing how D information can be obtained from images it is important to know how images are formed First the camera model is introduced and then
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Mobile Mapping and Navigation. Brad Kohlmeyer NAVTEQ Research
 Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
Mobile Mapping and Navigation Brad Kohlmeyer NAVTEQ Research Mobile Mapping & Navigation Markets Automotive Enterprise Internet & Wireless Mobile Devices 2 Local Knowledge & Presence Used to Create Most
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational hotography Alexei Efros, CMU, Fall 2011 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational hotography Alexei Efros, CMU, Fall 2011 Quiz: which is 1,2,3-point perspective Image
Projective geometry for Computer Vision
 Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 1. Recap Outline 2. Modeling Projection and Projection
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Geometry of Aerial photogrammetry. Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization)
") Geometry of Aerial photogrammetry Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization) Image formation - Recap The geometry of imaging system
Geometry of Aerial photogrammetry Panu Srestasathiern, PhD. Researcher Geo-Informatics and Space Technology Development Agency (Public Organization) Image formation - Recap The geometry of imaging system
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
A simple method for interactive 3D reconstruction and camera calibration from a single view
 A simple method for interactive 3D reconstruction and camera calibration from a single view Akash M Kushal Vikas Bansal Subhashis Banerjee Department of Computer Science and Engineering Indian Institute
A simple method for interactive 3D reconstruction and camera calibration from a single view Akash M Kushal Vikas Bansal Subhashis Banerjee Department of Computer Science and Engineering Indian Institute
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Module 4F12: Computer Vision and Robotics Solutions to Examples Paper 2
 Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Engineering Tripos Part IIB FOURTH YEAR Module 4F2: Computer Vision and Robotics Solutions to Examples Paper 2. Perspective projection and vanishing points (a) Consider a line in 3D space, defined in camera-centered
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction
 Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Computer Vision I - Algorithms and Applications: Multi-View 3D reconstruction Carsten Rother 09/12/2013 Computer Vision I: Multi-View 3D reconstruction Roadmap this lecture Computer Vision I: Multi-View
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 More on Single View Geometry Lecture 11 2 In Chapter 5 we introduced projection matrix (which
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 More on Single View Geometry Lecture 11 2 In Chapter 5 we introduced projection matrix (which
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Auto-calibration. Computer Vision II CSE 252B
 Auto-calibration Computer Vision II CSE 252B 2D Affine Rectification Solve for planar projective transformation that maps line (back) to line at infinity Solve as a Householder matrix Euclidean Projective
Auto-calibration Computer Vision II CSE 252B 2D Affine Rectification Solve for planar projective transformation that maps line (back) to line at infinity Solve as a Householder matrix Euclidean Projective
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Perspective projection. A. Mantegna, Martyrdom of St. Christopher, c. 1450
 Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Computer Vision CS 776 Fall 2018
 Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Robotics - Projective Geometry and Camera model. Matteo Pirotta
 Robotics - Projective Geometry and Camera model Matteo Pirotta pirotta@elet.polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano 14 March 2013 Inspired from Simone
Robotics - Projective Geometry and Camera model Matteo Pirotta pirotta@elet.polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano 14 March 2013 Inspired from Simone
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
Kohei Arai 1 Graduate School of Science and Engineering Saga University Saga City, Japan
 3D Map Creation Based on Knowledgebase System for Texture Mapping Together with Height Estimation Using Objects Shadows with High Spatial Resolution Remote Sensing Satellite Imagery Data Kohei Arai 1 Graduate
3D Map Creation Based on Knowledgebase System for Texture Mapping Together with Height Estimation Using Objects Shadows with High Spatial Resolution Remote Sensing Satellite Imagery Data Kohei Arai 1 Graduate
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334
CV: 3D to 2D mathematics. Perspective transformation; camera calibration; stereo computation; and more
 CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
Geometry: Outline. Projections. Orthographic Perspective
 Geometry: Cameras Outline Setting up the camera Projections Orthographic Perspective 1 Controlling the camera Default OpenGL camera: At (0, 0, 0) T in world coordinates looking in Z direction with up vector
Geometry: Cameras Outline Setting up the camera Projections Orthographic Perspective 1 Controlling the camera Default OpenGL camera: At (0, 0, 0) T in world coordinates looking in Z direction with up vector
Models and The Viewing Pipeline. Jian Huang CS456
 Models and The Viewing Pipeline Jian Huang CS456 Vertex coordinates list, polygon table and (maybe) edge table Auxiliary: Per vertex normal Neighborhood information, arranged with regard to vertices and
Models and The Viewing Pipeline Jian Huang CS456 Vertex coordinates list, polygon table and (maybe) edge table Auxiliary: Per vertex normal Neighborhood information, arranged with regard to vertices and
Integrating the Generations, FIG Working Week 2008,Stockholm, Sweden June 2008
 H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
H. Murat Yilmaz, Aksaray University,Turkey Omer Mutluoglu, Selçuk University, Turkey Murat Yakar, Selçuk University,Turkey Cutting and filling volume calculation are important issues in many engineering
More on single-view geometry class 10
 More on single-view geometry class 10 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan.
More on single-view geometry class 10 Multiple View Geometry Comp 290-089 Marc Pollefeys Multiple View Geometry course schedule (subject to change) Jan. 7, 9 Intro & motivation Projective 2D Geometry Jan.
CS 4620 Midterm, March 21, 2017
 CS 460 Midterm, March 1, 017 This 90-minute exam has 4 questions worth a total of 100 points. Use the back of the pages if you need more space. Academic Integrity is expected of all students of Cornell
CS 460 Midterm, March 1, 017 This 90-minute exam has 4 questions worth a total of 100 points. Use the back of the pages if you need more space. Academic Integrity is expected of all students of Cornell
DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION
 2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
2012 IEEE International Conference on Multimedia and Expo Workshops DEPTH AND GEOMETRY FROM A SINGLE 2D IMAGE USING TRIANGULATION Yasir Salih and Aamir S. Malik, Senior Member IEEE Centre for Intelligent
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Invariance of l and the Conic Dual to Circular Points C
 Invariance of l and the Conic Dual to Circular Points C [ ] A t l = (0, 0, 1) is preserved under H = v iff H is an affinity: w [ ] l H l H A l l v 0 [ t 0 v! = = w w] 0 0 v = 0 1 1 C = diag(1, 1, 0) is
Invariance of l and the Conic Dual to Circular Points C [ ] A t l = (0, 0, 1) is preserved under H = v iff H is an affinity: w [ ] l H l H A l l v 0 [ t 0 v! = = w w] 0 0 v = 0 1 1 C = diag(1, 1, 0) is
Multiple View Geometry in computer vision
 Multiple View Geometry in computer vision Chapter 8: More Single View Geometry Olaf Booij Intelligent Systems Lab Amsterdam University of Amsterdam, The Netherlands HZClub 29-02-2008 Overview clubje Part
Multiple View Geometry in computer vision Chapter 8: More Single View Geometry Olaf Booij Intelligent Systems Lab Amsterdam University of Amsterdam, The Netherlands HZClub 29-02-2008 Overview clubje Part
Discriminant Functions for the Normal Density
 Announcements Project Meetings CSE Rm. 4120 HW1: Not yet posted Pattern classification & Image Formation CSE 190 Lecture 5 CSE190d, Winter 2011 CSE190d, Winter 2011 Discriminant Functions for the Normal
Announcements Project Meetings CSE Rm. 4120 HW1: Not yet posted Pattern classification & Image Formation CSE 190 Lecture 5 CSE190d, Winter 2011 CSE190d, Winter 2011 Discriminant Functions for the Normal
Bayesian perspective-plane (BPP) with maximum likelihood searching for visual localization
 with maximum likelihood searching for visual localization") DOI 1.17/s1142-14-2134-8 Bayesian perspective-plane (BPP) with maximum likelihood searching for visual localization Zhaozheng Hu & Takashi Matsuyama Received: 8 November 213 /Revised: 15 April 214 /Accepted:
DOI 1.17/s1142-14-2134-8 Bayesian perspective-plane (BPP) with maximum likelihood searching for visual localization Zhaozheng Hu & Takashi Matsuyama Received: 8 November 213 /Revised: 15 April 214 /Accepted:
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
EXAM SOLUTIONS. Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006,
 School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
School of Computer Science and Communication, KTH Danica Kragic EXAM SOLUTIONS Image Processing and Computer Vision Course 2D1421 Monday, 13 th of March 2006, 14.00 19.00 Grade table 0-25 U 26-35 3 36-45
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Lecture 3 Sections 2.2, 4.4. Mon, Aug 31, 2009
 Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration
 ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration Kévin Boulanger, Kadi Bouatouch, Sumanta Pattanaik IRISA, Université de Rennes I, France University of Central Florida,
ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration Kévin Boulanger, Kadi Bouatouch, Sumanta Pattanaik IRISA, Université de Rennes I, France University of Central Florida,
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
2. POINT CLOUD DATA PROCESSING
 Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
USING 3-D VIRTUAL REALITY MODELS FOR IMAGE ORIENTATION IN MOBILE COMPUTING
 USING 3-D VIRTUAL REALITY MODELS FOR IMAGE ORIENTATION IN MOBILE COMPUTING Charalampos Georgiadis, Anthony Stefanidis, Peggy Agouris Dept. of Spatial Information Science and Engineering 348 Boardman Hall
USING 3-D VIRTUAL REALITY MODELS FOR IMAGE ORIENTATION IN MOBILE COMPUTING Charalampos Georgiadis, Anthony Stefanidis, Peggy Agouris Dept. of Spatial Information Science and Engineering 348 Boardman Hall
A Novel Method for Activity Place Sensing Based on Behavior Pattern Mining Using Crowdsourcing Trajectory Data
 A Novel Method for Activity Place Sensing Based on Behavior Pattern Mining Using Crowdsourcing Trajectory Data Wei Yang 1, Tinghua Ai 1, Wei Lu 1, Tong Zhang 2 1 School of Resource and Environment Sciences,
A Novel Method for Activity Place Sensing Based on Behavior Pattern Mining Using Crowdsourcing Trajectory Data Wei Yang 1, Tinghua Ai 1, Wei Lu 1, Tong Zhang 2 1 School of Resource and Environment Sciences,
Object Geolocation from Crowdsourced Street Level Imagery
 Object Geolocation from Crowdsourced Street Level Imagery Vladimir A. Krylov and Rozenn Dahyot ADAPT Centre, School of Computer Science and Statistics, Trinity College Dublin, Dublin, Ireland {vladimir.krylov,rozenn.dahyot}@tcd.ie
Object Geolocation from Crowdsourced Street Level Imagery Vladimir A. Krylov and Rozenn Dahyot ADAPT Centre, School of Computer Science and Statistics, Trinity College Dublin, Dublin, Ireland {vladimir.krylov,rozenn.dahyot}@tcd.ie
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
OSM-SVG Converting for Open Road Simulator
 OSM-SVG Converting for Open Road Simulator Rajashree S. Sokasane, Kyungbaek Kim Department of Electronics and Computer Engineering Chonnam National University Gwangju, Republic of Korea sokasaners@gmail.com,
OSM-SVG Converting for Open Road Simulator Rajashree S. Sokasane, Kyungbaek Kim Department of Electronics and Computer Engineering Chonnam National University Gwangju, Republic of Korea sokasaners@gmail.com,
CS 184, Fall 1996 Midterm #1 Professor: unknown
 CS 184, Fall 1996 Midterm #1 Professor: unknown Problem #1, Transformations (8pts) All questions assume a right handed coordinate system. Circle the correct answer: (2 pts each) a) In 3 space, two rotations
CS 184, Fall 1996 Midterm #1 Professor: unknown Problem #1, Transformations (8pts) All questions assume a right handed coordinate system. Circle the correct answer: (2 pts each) a) In 3 space, two rotations
Security and Disaster Preparedness: New York s Experience. Presented by: New York Department of Public Service. December 7, James T.
 Security and Disaster Preparedness: New York s Experience Presented by: James T. Gallagher New York Department of Public Service james_gallagher@dps.state.ny.us December 7, 2001 Rome, Italy 1 Security
Security and Disaster Preparedness: New York s Experience Presented by: James T. Gallagher New York Department of Public Service james_gallagher@dps.state.ny.us December 7, 2001 Rome, Italy 1 Security
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 4 Affine Structure from Motion Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 4 Affine Structure from Motion Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Semi-Automatic Approach for Building Reconstruction Using SPLIT-MERGE-SHAPE Method
 Semi-Automatic Approach for Building Reconstruction Using SPLIT-MERGE-SHAPE Method Jiann-Yeou RAU, Liang-Chien CHEN Tel: 886-3-4227151 Ext. 7651,7627,7622 Fax: 886-3-4255535 {jyrau, lcchen} @csrsr.ncu.edu.tw
Semi-Automatic Approach for Building Reconstruction Using SPLIT-MERGE-SHAPE Method Jiann-Yeou RAU, Liang-Chien CHEN Tel: 886-3-4227151 Ext. 7651,7627,7622 Fax: 886-3-4255535 {jyrau, lcchen} @csrsr.ncu.edu.tw
Ground Plane Rectification by Tracking Moving Objects
 Ground Plane Rectification by Tracking Moving Objects Biswajit Bose and Eric Grimson Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology Cambridge, MA 2139, USA
Ground Plane Rectification by Tracking Moving Objects Biswajit Bose and Eric Grimson Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology Cambridge, MA 2139, USA
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
CS 184, Fall 1996 Midterm #1 Professor: unknown
 CS 184, Fall 1996 Midterm #1 Professor: unknown Problem #1, Transformations (8pts) All questions assume a right handed coordinate system. Circle the correct answer: (2 pts each) a) In 3 space, two rotations
CS 184, Fall 1996 Midterm #1 Professor: unknown Problem #1, Transformations (8pts) All questions assume a right handed coordinate system. Circle the correct answer: (2 pts each) a) In 3 space, two rotations
2D Transforms. Lecture 4 CISC440/640 Spring Department of Computer and Information Science
 2D Transforms Lecture 4 CISC440/640 Spring 2015 Department of Computer and Information Science Where are we going? A preview of assignment #1 part 2: The Ken Burns Effect 2 Where are we going? A preview
2D Transforms Lecture 4 CISC440/640 Spring 2015 Department of Computer and Information Science Where are we going? A preview of assignment #1 part 2: The Ken Burns Effect 2 Where are we going? A preview
An Image-Based System for Urban Navigation
 An Image-Based System for Urban Navigation Duncan Robertson and Roberto Cipolla Cambridge University Engineering Department Trumpington Street, Cambridge, CB2 1PZ, UK Abstract We describe the prototype
An Image-Based System for Urban Navigation Duncan Robertson and Roberto Cipolla Cambridge University Engineering Department Trumpington Street, Cambridge, CB2 1PZ, UK Abstract We describe the prototype
Chapter 5. Projections and Rendering
 Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform
 EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform The goal of this fourth lab is to ˆ Learn how to detect corners, and use them in a tracking application ˆ Learn how to describe
EN1610 Image Understanding Lab # 4: Corners, Interest Points, Hough Transform The goal of this fourth lab is to ˆ Learn how to detect corners, and use them in a tracking application ˆ Learn how to describe
INTRODUCTION TO COMPUTER GRAPHICS. cs123. It looks like a matrix Sort of. Viewing III. Projection in Practice 1 / 52
 It looks like a matrix Sort of Viewing III Projection in Practice 1 / 52 Arbitrary 3D views } view volumes/frusta spec d by placement and shape } Placement: } Position (a point) } look and up vectors }
It looks like a matrix Sort of Viewing III Projection in Practice 1 / 52 Arbitrary 3D views } view volumes/frusta spec d by placement and shape } Placement: } Position (a point) } look and up vectors }
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know