Foundations of Geometric Algebra Computing
|
|
|
- Jeffry White
- 6 years ago
- Views:
Transcription


1 Foundations of Geometric Algebra Computing Dr.-Ing. Dietmar Hildenbrand LOEWE Priority Program Cocoon Technische Universität Darmstadt
2 Achtung Änderung! Die Übung findet Montags jeweils 11:40 bis 13:10 statt!!!
3 Overview Foundations of Geometric Algebra (GA) GA Applications One GA example GA Computing precompiler for standard programming languages Molecular dynamics application
4 History of Geometric Algebra&Calculus [David Hestenes 2001]

5 History of Geometric Algebra&Calculus 150 years [David Hestenes 2001]


6 Hermann G. Grassmann Outer Product vector bivector trivector Inner Product
7 Hermann G. Grassmann Outer Product vector bivector trivector Inner Product cross product and scalar product are special cases of these general products
8 Hermann G. Grassmann Preface of Ausdehnungslehre (Extensive Algebra) of 1862: "I remain completely confident that the labor I have expended on the science presented here and which has demanded a signicant part of my life, as well as the most strenuous application of my powers, will not be lost. It is true that I am aware that the form which I have given the science is imperfect and must be imperfect. But I know and feel obliged to state (though I run the risk of seeming arrogant) that even if this work should again remain unused for another seventeen years or even longer, without entering into the actual development of science, still that time will come when it will be brought forth from the dust of oblivion and when ideas now dormant will bring forth fruit." and he went on to say: "there will come a time when these ideas, perhaps in a new form, will arise anew and will enter into a living communication with contemporary developments."
9 Hermann G. Grassmann Preface of Ausdehnungslehre (Extensive Algebra) of 1862: "I remain completely confident that the labor I have expended on the science presented here and which has demanded a signicant part of my life, as well as the most strenuous application of my powers, will not be lost. It is true that I am aware that the form which I have given the science is imperfect and must be imperfect. But I know and feel obliged to state (though I run the risk of seeming arrogant) that even if this work should again remain unused for another seventeen years or even longer, without entering into the actual development of science, still that time will come when it will be brought forth from the dust of oblivion and when ideas now dormant will bring forth fruit." and he went on to say: "there will come a time when these ideas, perhaps in a new form, will arise anew and will enter into a living communication with contemporary developments."
10 Hermann G. Grassmann Preface of Ausdehnungslehre (Extensive Algebra) of 1862: "I remain completely confident that the labor I have expended on the science presented here and which has demanded a signicant part of my life, as well as the most strenuous application of my powers, will not be lost. It is true that I am aware that the form which I have given the science is imperfect and must be imperfect. But I know and feel obliged to state (though I run the risk of seeming arrogant) that even if this work should again remain unused for another seventeen years or even longer, without entering into the actual development of science, still that time will come when it will be brought forth from the dust of oblivion and when ideas now dormant will bring forth fruit." and he went on to say: "there will come a time when these ideas, perhaps in a new form, will arise anew and will enter into a living communication with contemporary developments."



11 William K. Clifford Geometric Product For vectors Quaternions of Hamilton Normally called Clifford algebra in honor of Clifford He called it geometric algebra
 developed calculus (\"Clifford")
 developed the Conformal Geometric Algebra Geometric Algebra <->")
12 David Hestenes realized geometric algebra as a general language for physics ( New Foundations of Classical Mechanics, ) developed calculus ("Clifford Algebra to Geometric Calculus: A Unified Language for Mathematics and Physics") developed the Conformal Geometric Algebra Geometric Algebra <-> Clifford Algebra?

13 Goal of geometric algebra Mathematical language close to the geometric intuition
14 Conformal Geometric Algebra (CGA) The 5 basis vectors:

15 Basis elements of CGA


16 Plane and sphere as vector expression sphere plane

17 Intersection of geometric objects a,b are sphere a ^ b describes the intersection of the spheres represents a circle


18 Intersection of sphere and line
19 Circle and line Circle (a^b^c) Circle -> Line ( ) Technische Universität Darmstadt Computer Science Department Dietmar Hildenbrand 19
 Rotor = Quaternion")

20 Geometric Operations Rotation about L (through the origin) Rotor = Quaternion Note.: the line can be arbitrary -> Rotation about an arbitrary axis(dual quaternion)

21 The inner product a,b 3D vectors -> scalar product
22 Distances One formula for distance of two points distance between point and plane is a point inside or outside of a sphere?

23 Angles One formula for the angle between 2 lines 2 planes 2 circles

24 Properties of Conformal Geometric Algebra Easy calculations with geometric objects and transformations Geometric intuitiveness Simplicity Compactness Unification of mathematical systems Complex numbers Vector algebra Quaternions Projective geometry Plücker coordinates.

25 First commercial product since 2007: Real time lighting engine Enlighten Geomerics, Cambridge UK Unreal Game Engine

26 Our Applications Robot kinematics [Craig]

27 Application Computer animation/ Virtual reality [Tolani et al. 2000]

28 Application Approximation of geometric objects to point clouds of laser scans

29 Application Finite Element Solver compact expressions for velocities forces combining rotational and linear parts [Elmar Brendel et al]

30 Application Molecular dynamics simulation
31 Application within Cocoon EM simulation One formula for Maxwell equations

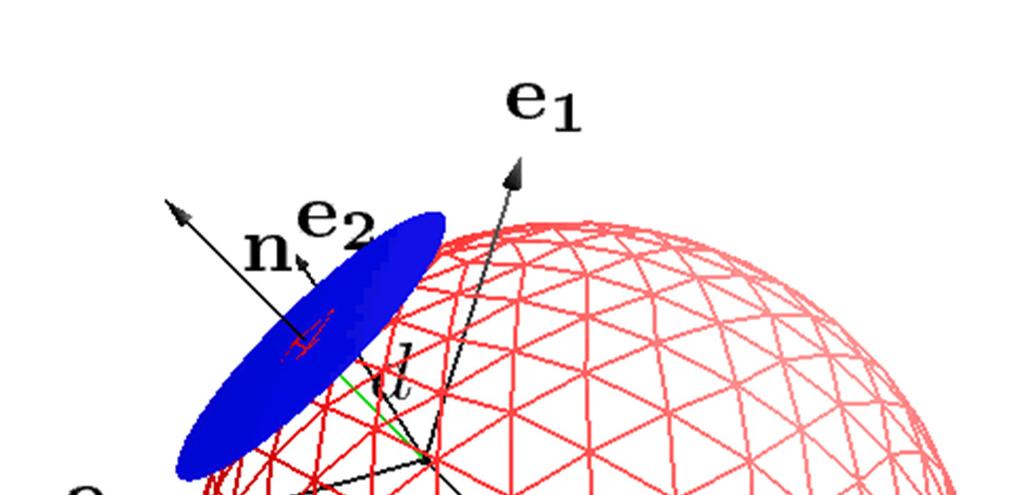
32 Horizon Example Compute the horizon circle with observer P Earth S
33 Warum Horizont-Aufgabe? Nachweis von Nähe der algebraischen Beschreibung zur geometrischen Vorstellung Einfachheit/Kompaktheit der Algorithmen
34 The Solution P, S, C?
35 The Solution Which sphere intersects with the sphere S at the horizon circle?
36 The Solution Which sphere intersects with the sphere S at the horizon circle? Sphere K with center P and radius such that it touches S
37 The solution Which sphere intersects with the sphere S at the horizon circle? Sphere K with center P and radius such that it touches S The radius of K?
38 The solution Which sphere intersects with the sphere S at the horizon circle? Sphere K with center P and radius such that it touches S The radius a of K?
39 The solution Which sphere intersects with the sphere S at the horizon circle? Sphere K with center P and radius such that it touches S The radius a of K? How to describe the sphere K?
40 The solution Which sphere intersects with the sphere S at the horizon circle? Sphere K with center P and radius such that it touches S The radius a of K? How to describe the sphere K?
41 The solution Which sphere intersects with the sphere S at the horizon circle? Sphere K with center P and radius such that it touches S The radius a of K? How to describe the sphere K? The formula for the horizon circle C?
42 The solution Which sphere intersects with the sphere S at the horizon circle? Sphere K with center P and radius such that it touches S The radius a of K? How to describe the sphere K? The formula for the horizon circle C?
43 Properties of Geometric Algebra geometrically intuitive? simple? compact? role of coordinates?
44 How to support the widespread use of geometric algebra? What form of geometric algebra do we need today? "there will come a time when these ideas, perhaps in a new form, will arise anew and will enter into a living communication with contemporary developments. [Grassmann 1862] Making it accessible for as many people as possible and their applications -> provide a suitable computing technology
45 Geometric Algebra Computing
46 Goals of Geometric Algebra Computing Geometric algebra algorithms optimizer ( Easy development process integration in standard programming languages Intuitive and compact descriptions based on geometric algebra leading to reduction in development time better maintainability High performance and robustness of the implementation

47 Proof-of-Concept Application Visual and interactive development Compact algorithms (about 30%) First implementation: 50 times slower than conventional implementation Eurographics 2006: Paper " Competitive runtime performance for inverse kinematics algorithms using conformal geometric algebra " by Dietmar Hildenbrand, Daniel Fontijne, Yusheng Wang, Marc Alexa and Leo Dorst First geometric algebra implementation that was faster than the conventional implementation

48 Geometric Algebra Computing Architecture
49 Table based Compilation Example Geometric product multiplication table in 3D GA: GA algorithm: resulting C code:

50 Table based Compilation Example Geometric product multiplication table in 3D GA: GA algorithm: resulting C code:



51 Horizon Example in Gaalop based on the CLUCalc language (
52 Horizon Example in Gaalop 32-dim multivector array with optimized coefficient computations to be further optimized from the storage point of view

53 Horizon Example in Gaalop 32-dim multivector array with optimized coefficient computations to be further optimized from the storage point of view This kind of very easy arithmetic expressions lead to high runtime performance and robustness
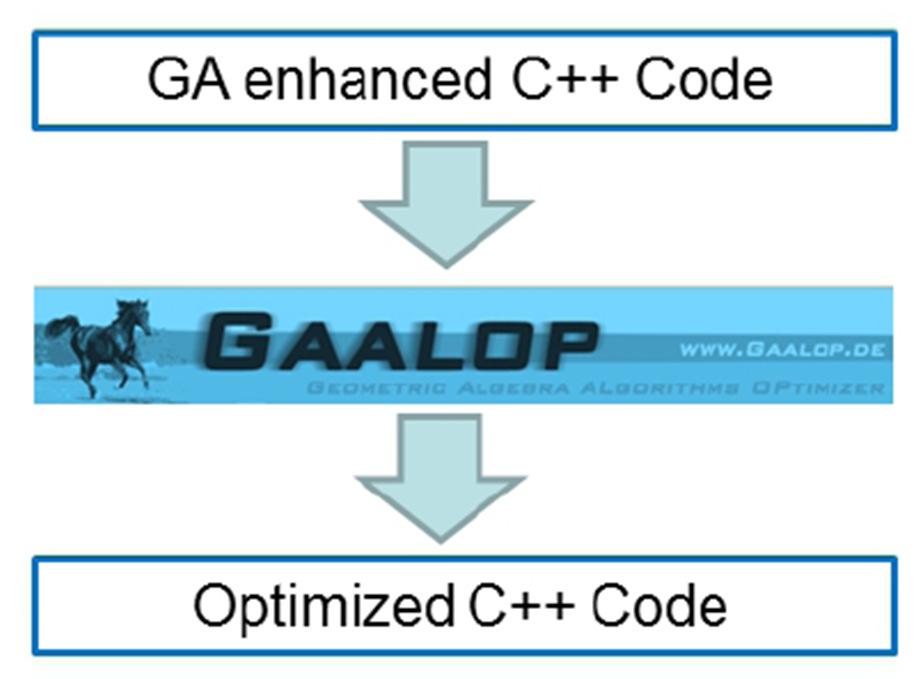
54 Gaalop Precompiler

55 Gaalop Precompiler Visualization of the horizon example

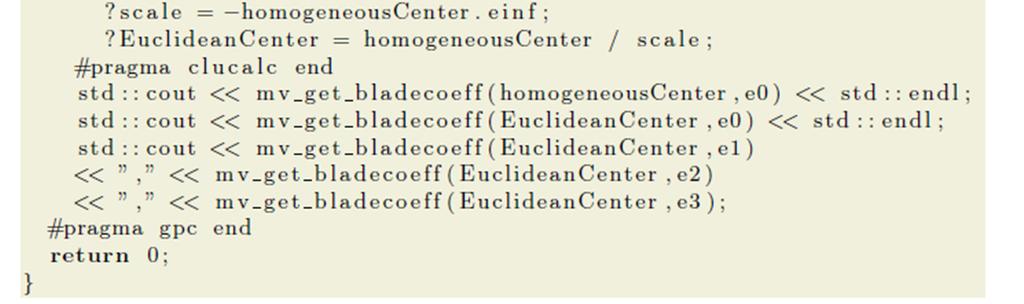
56 Gaalop Precompiler Horizon computations in C++

57 Gaalop Precompiler Gaalop GPC for OpenCL
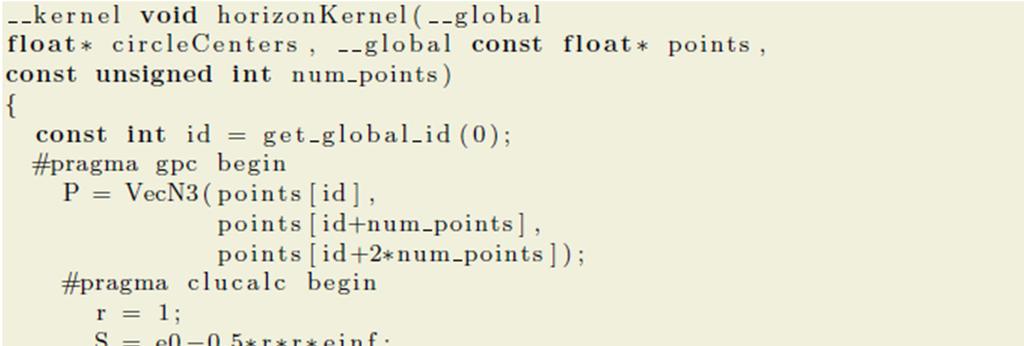

58 Gaalop Precompiler Horizon example in OpenCL
59 Gaalop GCD for OpenCL available for Windows and Linux ( Application example: Molecular dynamics
60 Results Better runtime performance Better Numerical Stability (Energy Conservation)
61 Conclusion Geometrically intuitive Fast and robust implementations
62 Reference Foundations of Geometric Algebra Computing Dietmar Hildenbrand Springer, Nov Article in Elektronik-Praxis:
63 Übungsaufgaben
64 Übungsthemen Mögliche Aufgaben: Kegelschnitte und Quadriken in GA: Kapitel 6d/8d von Christian + 9D von Julio Paper Coordinate Free Perspective Projection of Points in the conformal Model von Stephen Mann Beamforming-Paper Selig-Paper zur Dynamik mit 8D Technische Universität Darmstadt Computer Science Department Dietmar Hildenbrand 64
65 Übungsthemen Mögliche Aufgaben: Bsp.-Algorithmen für compass-ruler algebra mit Vergleichen zu herkömmlichen Algorithmen Raytracer (Basis: OpenCL-Raytracer) Game-Engine-Algorithmen mit Test und Vergleich EM-Simulation mit OpenCL Parallele Pi-Suche mit OpenCL eigene Ideen? Gaalop-Themen Technische Universität Darmstadt Computer Science Department Dietmar Hildenbrand 65
66 Gaalop-Erweiterungen I Precompiler-Erweiterung Visualisierung konformer Objekte Visualisierung für 6d/8d OpenMP / Performance? CluCalc-Visualisierungs-Integration (in C- und Java-Version) in Gaalop? Precompiler für Mathematica? Precompiler für Java? Gaalop -> LaTeX in lineare Algebra-Form (Skalar/Kreuzprodukte etc.) Technische Universität Darmstadt Computer Science Department Dietmar Hildenbrand 66
67 Gaalop-Erweiterungen II Precompiler-Erweiterung Gaalop for OpenACC Cmake-Anpassung OpenACC-Backend Technische Universität Darmstadt Computer Science Department Dietmar Hildenbrand 67

68 Thanks a lot
From Grassmann s vision to Geometric Algebra Computing
 From Grassmann s vision to Geometric Algebra Computing Dietmar Hildenbrand 1. Introduction What mathematicians often call Clifford algebra is called geometric algebra if the focus is on the geometric meaning
From Grassmann s vision to Geometric Algebra Computing Dietmar Hildenbrand 1. Introduction What mathematicians often call Clifford algebra is called geometric algebra if the focus is on the geometric meaning
ANALYSIS OF POINT CLOUDS Using Conformal Geometric Algebra
 ANALYSIS OF POINT CLOUDS Using Conformal Geometric Algebra Dietmar Hildenbrand Research Center of Excellence for Computer Graphics, University of Technology, Darmstadt, Germany Dietmar.Hildenbrand@gris.informatik.tu-darmstadt.de
ANALYSIS OF POINT CLOUDS Using Conformal Geometric Algebra Dietmar Hildenbrand Research Center of Excellence for Computer Graphics, University of Technology, Darmstadt, Germany Dietmar.Hildenbrand@gris.informatik.tu-darmstadt.de
Geometric Algebra enhanced Precompiler for C++ and OpenCL
 Geometric Algebra enhanced Precompiler for C++ and OpenCL Patrick Charrier and Dietmar Hildenbrand Abstract The focus of the this work is a simplified integration of algorithms expressed in Geometric Algebra
Geometric Algebra enhanced Precompiler for C++ and OpenCL Patrick Charrier and Dietmar Hildenbrand Abstract The focus of the this work is a simplified integration of algorithms expressed in Geometric Algebra
Introduction to Geometric Algebra Lecture I
 Introduction to Geometric Algebra Lecture I Leandro A. F. Fernandes laffernandes@inf.ufrgs.br Manuel M. Oliveira oliveira@inf.ufrgs.br CG UFRGS Geometric problems Geometric data Lines, planes, circles,
Introduction to Geometric Algebra Lecture I Leandro A. F. Fernandes laffernandes@inf.ufrgs.br Manuel M. Oliveira oliveira@inf.ufrgs.br CG UFRGS Geometric problems Geometric data Lines, planes, circles,
Introduction to Geometric Algebra Lecture VI
 Introduction to Geometric Algebra Lecture VI Leandro A. F. Fernandes laffernandes@inf.ufrgs.br Manuel M. Oliveira oliveira@inf.ufrgs.br Visgraf - Summer School in Computer Graphics - 2010 CG UFRGS Lecture
Introduction to Geometric Algebra Lecture VI Leandro A. F. Fernandes laffernandes@inf.ufrgs.br Manuel M. Oliveira oliveira@inf.ufrgs.br Visgraf - Summer School in Computer Graphics - 2010 CG UFRGS Lecture
APPENDIX A CLIFFORD ALGEBRA
 1 APPENDIX A CLIFFORD ALGEBRA Clifford algebra (CA), or geometric algebra, is a powerful mathematical tool which allows for a direct and intuitive solution of geometric problems in fields as computer graphics,
1 APPENDIX A CLIFFORD ALGEBRA Clifford algebra (CA), or geometric algebra, is a powerful mathematical tool which allows for a direct and intuitive solution of geometric problems in fields as computer graphics,
Geometric Algebra for Computer Graphics
 John Vince Geometric Algebra for Computer Graphics 4u Springer Contents Preface vii 1 Introduction 1 1.1 Aims and objectives of this book 1 1.2 Mathematics for CGI software 1 1.3 The book's structure 2
John Vince Geometric Algebra for Computer Graphics 4u Springer Contents Preface vii 1 Introduction 1 1.1 Aims and objectives of this book 1 1.2 Mathematics for CGI software 1 1.3 The book's structure 2
Inverse Kinematics of a Humanoid Robot based on Conformal Geometric Algebra using optimized Code Generation
 2008 8 th IEEE-RAS International Conference on Humanoid Robots December 1 ~ 3, 2008 / Daejeon, Korea Inverse Kinematics of a Humanoid Robot based on Conformal Geometric Algebra using optimized Code Generation
2008 8 th IEEE-RAS International Conference on Humanoid Robots December 1 ~ 3, 2008 / Daejeon, Korea Inverse Kinematics of a Humanoid Robot based on Conformal Geometric Algebra using optimized Code Generation
Introduction to Geometric Algebra
 Introduction to Geometric Algebra Lecture 1 Why Geometric Algebra? Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Lecture notes available in http://www.ic.uff.br/~laffernandes/teaching/2011.2/topicos_ag
Introduction to Geometric Algebra Lecture 1 Why Geometric Algebra? Professor Leandro Augusto Frata Fernandes laffernandes@ic.uff.br Lecture notes available in http://www.ic.uff.br/~laffernandes/teaching/2011.2/topicos_ag
Geometry and Computing
 Geometry and Computing Series Editors Herbert Edelsbrunner Leif Kobbelt Konrad Polthier Editorial Advisory Board Jean-Daniel Boissonnat Gunnar Carlsson Bernard Chazelle Xiao-Shan Gao Craig Gotsman Leo
Geometry and Computing Series Editors Herbert Edelsbrunner Leif Kobbelt Konrad Polthier Editorial Advisory Board Jean-Daniel Boissonnat Gunnar Carlsson Bernard Chazelle Xiao-Shan Gao Craig Gotsman Leo
Coordinate Free Perspective Projection of Points in the Conformal Model Using Transversions
 Coordinate Free Perspective Projection of Points in the Conformal Model Using Transversions Stephen Mann Abstract Goldman presented a method for computing a versor form of the perspective projection of
Coordinate Free Perspective Projection of Points in the Conformal Model Using Transversions Stephen Mann Abstract Goldman presented a method for computing a versor form of the perspective projection of
PLAY WITH GEOMETRY ANIMATED AND INTERACTIVE, FREE, INSTANT ACCESS, ONLINE GEOMETRIC ALGEBRA JAVA APPLETS WITH CINDERELLA
 Fukui University International Congress 2002, International Symposium on Advanced Mechanical Engineering, Workshop on Mechanical Engineering between Fukui-Pukyong National Universities, 11-13 September
Fukui University International Congress 2002, International Symposium on Advanced Mechanical Engineering, Workshop on Mechanical Engineering between Fukui-Pukyong National Universities, 11-13 September
Inverse kinematics computation in computer graphics and robotics using conformal geometric algebra
 This is page 1 Printer: Opaque this Inverse kinematics computation in computer graphics and robotics using conformal geometric algebra Dietmar Hildenbrand, Julio Zamora and Eduardo Bayro-Corrochano ABSTRACT
This is page 1 Printer: Opaque this Inverse kinematics computation in computer graphics and robotics using conformal geometric algebra Dietmar Hildenbrand, Julio Zamora and Eduardo Bayro-Corrochano ABSTRACT
Geometric Algebra. 8. Conformal Geometric Algebra. Dr Chris Doran ARM Research
 Geometric Algebra 8. Conformal Geometric Algebra Dr Chris Doran ARM Research Motivation Projective geometry showed that there is considerable value in treating points as vectors Key to this is a homogeneous
Geometric Algebra 8. Conformal Geometric Algebra Dr Chris Doran ARM Research Motivation Projective geometry showed that there is considerable value in treating points as vectors Key to this is a homogeneous
Advanced Geometric Approach for Graphics and Visual Guided Robot Object Manipulation
 Advanced Geometric Approach for Graphics and Visual Guided Robot Object Manipulation Dietmar Hildenbrand Interactive Graphics Systems Group University of Technology Darmstadt, Germany dhilden@gris.informatik.tu-darmstadt.de
Advanced Geometric Approach for Graphics and Visual Guided Robot Object Manipulation Dietmar Hildenbrand Interactive Graphics Systems Group University of Technology Darmstadt, Germany dhilden@gris.informatik.tu-darmstadt.de
Unified Mathematics (Uni-Math)
") Unified Mathematics (Uni-Math) with Geometric Algebra (GA) David Hestenes Arizona State University For geometry, you know, is the gateway to science, and that gate is so low and small that you can enter
Unified Mathematics (Uni-Math) with Geometric Algebra (GA) David Hestenes Arizona State University For geometry, you know, is the gateway to science, and that gate is so low and small that you can enter
Katu Software Algebra 1 Geometric Sequence
 Katu Software Algebra 1 Geometric Sequence Read Book Online: Katu Software Algebra 1 Geometric Sequence Download or read online ebook katu software algebra 1 geometric sequence in any format for any devices.
Katu Software Algebra 1 Geometric Sequence Read Book Online: Katu Software Algebra 1 Geometric Sequence Download or read online ebook katu software algebra 1 geometric sequence in any format for any devices.
PRIMITIVES INTERSECTION WITH CONFORMAL 5D GEOMETRY
 PRIMITIVES INTERSECTION WITH CONFORMAL 5D GEOMETRY Eduardo Roa eduroam@ldc.usb.ve Víctor Theoktisto vtheok@usb.ve Laboratorio de Computación Gráfica e Interacción Universidad Simón Bolívar, Caracas-VENEZUELA.
PRIMITIVES INTERSECTION WITH CONFORMAL 5D GEOMETRY Eduardo Roa eduroam@ldc.usb.ve Víctor Theoktisto vtheok@usb.ve Laboratorio de Computación Gráfica e Interacción Universidad Simón Bolívar, Caracas-VENEZUELA.
Conic and Cyclidic Sections in Double Conformal Geometric Algebra G 8,2
 Conic and Cyclidic Sections in Double Conformal Geometric Algebra G 8,2 Robert Benjamin Easter 1 and Eckhard Hitzer 2 Abstract: The G 8,2 Geometric Algebra, also called the Double Conformal / Darboux Cyclide
Conic and Cyclidic Sections in Double Conformal Geometric Algebra G 8,2 Robert Benjamin Easter 1 and Eckhard Hitzer 2 Abstract: The G 8,2 Geometric Algebra, also called the Double Conformal / Darboux Cyclide
Programming with Gaigen 2
 Programming with Gaigen 2 p. 1/24 Programming with Gaigen 2 Programming with Gaigen 2 Daniel Fontijne University of Amsterdam fontijne@science.uva.nl Programming with Gaigen 2 p. 2/24 Overview Part I What
Programming with Gaigen 2 p. 1/24 Programming with Gaigen 2 Programming with Gaigen 2 Daniel Fontijne University of Amsterdam fontijne@science.uva.nl Programming with Gaigen 2 p. 2/24 Overview Part I What
Engineering Graphics in Geometric Algebra
 Engineering Graphics in Geometric Algebra Alyn Rockwood, Dietmar Hildenbrand Abstract We illustrate the suitability of geometric algebra for representing structures and developing algorithms in computer
Engineering Graphics in Geometric Algebra Alyn Rockwood, Dietmar Hildenbrand Abstract We illustrate the suitability of geometric algebra for representing structures and developing algorithms in computer
EFFICIENT INVERSE KINEMATICS ALGORITHM BASED ON CONFORMAL GEOMETRIC ALGEBRA Using Reconfigurable Hardware
 EFFICIENT INVERSE KINEMATICS ALGORITHM BASED ON CONFORMAL GEOMETRIC ALGEBRA Using Reconfigurable Hardware Dietmar Hildenbrand Research Center of Excellence for Computer Graphics, University of Technology,
EFFICIENT INVERSE KINEMATICS ALGORITHM BASED ON CONFORMAL GEOMETRIC ALGEBRA Using Reconfigurable Hardware Dietmar Hildenbrand Research Center of Excellence for Computer Graphics, University of Technology,
2D Euclidean Geometric Algebra Matrix Representation
 2D Euclidean Geometric Algebra Matrix Representation Kurt Nalt March 29, 2015 Abstract I present the well-known matrix representation of 2D Euclidean Geometric Algebra, and suggest a literal geometric
2D Euclidean Geometric Algebra Matrix Representation Kurt Nalt March 29, 2015 Abstract I present the well-known matrix representation of 2D Euclidean Geometric Algebra, and suggest a literal geometric
FPGA-Accelerated Color Edge Detection Using a Geometric-Algebra-To-Verilog Compiler
 FPGA-Accelerated Color Edge Detection Using a Geometric-Algebra-To-Verilog Compiler Florian Stock and Andreas Koch Embedded Systems and Applications Group TU Darmstadt Darmstadt, Germany email: stock koch@esa.informatik.tu-darmstadt.de
FPGA-Accelerated Color Edge Detection Using a Geometric-Algebra-To-Verilog Compiler Florian Stock and Andreas Koch Embedded Systems and Applications Group TU Darmstadt Darmstadt, Germany email: stock koch@esa.informatik.tu-darmstadt.de
Introduction to Geometric Algebra Lecture V
 Introduction to Geometric Algebra Lecture V Leandro A. F. Fernandes laffernandes@inf.ufrgs.br Manuel M. Oliveira oliveira@inf.ufrgs.br Visgraf - Summer School in Computer Graphics - 2010 CG UFRGS Lecture
Introduction to Geometric Algebra Lecture V Leandro A. F. Fernandes laffernandes@inf.ufrgs.br Manuel M. Oliveira oliveira@inf.ufrgs.br Visgraf - Summer School in Computer Graphics - 2010 CG UFRGS Lecture
INTERACTIVE VISUALISATION OF FULL GEOMETRIC DESCRIPTION OF CRYSTAL SPACE GROUPS
 Proceedings of the International Symposium on Advanced Mechanical Engineering between Pukyong National University (Korea), University of Fukui (Japan) and University of Shanghai for Science and Technology
Proceedings of the International Symposium on Advanced Mechanical Engineering between Pukyong National University (Korea), University of Fukui (Japan) and University of Shanghai for Science and Technology
SEMINARI CHIMICI. Dr. Eckhard Hitzer Department of Applied Physics University of Fukui - Japan
 SEMINARI CHIMICI Data mercoledì 3 Marzo 2010, ore 14.15-16.15 giovedì 4 Marzo 2010, ore 14.15-16.15 Dipartimento di Chimica Strutturale e Stereochimica Inorganica Aula H dcssi.istm.cnr.it Via Venezian,
SEMINARI CHIMICI Data mercoledì 3 Marzo 2010, ore 14.15-16.15 giovedì 4 Marzo 2010, ore 14.15-16.15 Dipartimento di Chimica Strutturale e Stereochimica Inorganica Aula H dcssi.istm.cnr.it Via Venezian,
Teaching Geometric Algebra with CLUCalc
 Teaching Geometric Algebra with CLUCalc University of Kiel, Cognitive Systems Group Christian Perwass Abstract This text gives a short overview of the features of the visualization software CLUCalc, and
Teaching Geometric Algebra with CLUCalc University of Kiel, Cognitive Systems Group Christian Perwass Abstract This text gives a short overview of the features of the visualization software CLUCalc, and
TECHNISCHE UNIVERSITÄT BERLIN WS2005 Fachbereich 3 - Mathematik Prof. Dr. U. Pinkall / Charles Gunn Abgabe:
 TECHNISCHE UNIVERSITÄT BERLIN WS2005 Fachbereich 3 - Mathematik Prof. Dr. U. Pinkall / Charles Gunn Abgabe: 27.10.2005 1. Übung Geometrie I (Lines in P 2 (R), Separation, Desargues) 1. Aufgabe Line equations
TECHNISCHE UNIVERSITÄT BERLIN WS2005 Fachbereich 3 - Mathematik Prof. Dr. U. Pinkall / Charles Gunn Abgabe: 27.10.2005 1. Übung Geometrie I (Lines in P 2 (R), Separation, Desargues) 1. Aufgabe Line equations
a a= a a =a a 1 =1 Division turned out to be equivalent to multiplication: a b= a b =a 1 b
 MATH 245 Extra Effort ( points) My assistant read through my first draft, got half a page in, and skipped to the end. So I will save you the flipping. Here is the assignment. Do just one of them. All the
MATH 245 Extra Effort ( points) My assistant read through my first draft, got half a page in, and skipped to the end. So I will save you the flipping. Here is the assignment. Do just one of them. All the
Modeling Adaptive Deformations during Free-form Pose Estimation
 Modeling Adaptive Deformations during Free-form Pose Estimation Bodo Rosenhahn, Christian Perwass, Gerald Sommer Institut für Informatik und Praktische Mathematik Christian-Albrechts-Universität zu Kiel
Modeling Adaptive Deformations during Free-form Pose Estimation Bodo Rosenhahn, Christian Perwass, Gerald Sommer Institut für Informatik und Praktische Mathematik Christian-Albrechts-Universität zu Kiel
Geometric Algebra for Computer Graphics
 Geometric Algebra for Computer Graphics John Vince Geometric Algebra for Computer Graphics 123 John Vince, MTech, PhD, DSc Emeritus Professor in Digital Media Bournemouth University UK ISBN 978-1-84628-996-5
Geometric Algebra for Computer Graphics John Vince Geometric Algebra for Computer Graphics 123 John Vince, MTech, PhD, DSc Emeritus Professor in Digital Media Bournemouth University UK ISBN 978-1-84628-996-5
Robot object manipulation using stereoscopic vision and conformal geometric algebra
 Applied Bionics and Biomechanics 8 (2011 411 428 DOI 10.3233/ABB-2011-0005 IOS Press 411 Robot object manipulation using stereoscopic vision and conformal geometric algebra Julio Zamora-Esquivel a, and
Applied Bionics and Biomechanics 8 (2011 411 428 DOI 10.3233/ABB-2011-0005 IOS Press 411 Robot object manipulation using stereoscopic vision and conformal geometric algebra Julio Zamora-Esquivel a, and
Rectangular Coordinates in Space
 Rectangular Coordinates in Space Philippe B. Laval KSU Today Philippe B. Laval (KSU) Rectangular Coordinates in Space Today 1 / 11 Introduction We quickly review one and two-dimensional spaces and then
Rectangular Coordinates in Space Philippe B. Laval KSU Today Philippe B. Laval (KSU) Rectangular Coordinates in Space Today 1 / 11 Introduction We quickly review one and two-dimensional spaces and then
A Geometric Algebra Implementation using Binary Tree
 A Geometric Algebra Implementation using Binary Tree Stéphane Breuils, Vincent Nozick, Laurent Fuchs To cite this version: Stéphane Breuils, Vincent Nozick, Laurent Fuchs. A Geometric Algebra Implementation
A Geometric Algebra Implementation using Binary Tree Stéphane Breuils, Vincent Nozick, Laurent Fuchs To cite this version: Stéphane Breuils, Vincent Nozick, Laurent Fuchs. A Geometric Algebra Implementation
Geometric Hand-Eye Calibration for an Endoscopic Neurosurgery System
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Geometric Hand-Eye Calibration for an Endoscopic Neurosurgery System Jorge Rivera-Rovelo Silena Herold-Garcia
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-23, 2008 Geometric Hand-Eye Calibration for an Endoscopic Neurosurgery System Jorge Rivera-Rovelo Silena Herold-Garcia
Rational Numbers: Graphing: The Coordinate Plane
 Rational Numbers: Graphing: The Coordinate Plane A special kind of plane used in mathematics is the coordinate plane, sometimes called the Cartesian plane after its inventor, René Descartes. It is one
Rational Numbers: Graphing: The Coordinate Plane A special kind of plane used in mathematics is the coordinate plane, sometimes called the Cartesian plane after its inventor, René Descartes. It is one
G 6,3 GEOMETRIC ALGEBRA
 9 th International Conference on Clifford Algebras and their Applications in Mathematical Physics K. Gürlebeck (ed.) Weimar, Germany, 15 0 July 011 G 6,3 GEOMETRIC ALGEBRA Julio Zamora-Esquivel Intel,VPG,Guadalajara
9 th International Conference on Clifford Algebras and their Applications in Mathematical Physics K. Gürlebeck (ed.) Weimar, Germany, 15 0 July 011 G 6,3 GEOMETRIC ALGEBRA Julio Zamora-Esquivel Intel,VPG,Guadalajara
Visualization of the projective line geometry for geometric algebra
 Visualization of the projective line geometry for geometric algebra Drawing lines in GAViewer Patrick M. de Kok 5640318 Bachelor thesis Credits: 18EC Bacheloropleiding Kunstmatige Intelligentie University
Visualization of the projective line geometry for geometric algebra Drawing lines in GAViewer Patrick M. de Kok 5640318 Bachelor thesis Credits: 18EC Bacheloropleiding Kunstmatige Intelligentie University
Solution of inverse kinematic problem for serial robot using dual quaterninons and plucker coordinates
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2009 Solution of inverse kinematic problem for
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2009 Solution of inverse kinematic problem for
The Making of a Geometric Algebra Package in Matlab Computer Science Department University of Waterloo Research Report CS-99-27
 The Making of a Geometric Algebra Package in Matlab Computer Science Department University of Waterloo Research Report CS-99-27 Stephen Mann, Leo Dorst, and Tim Bouma smann@cgl.uwaterloo.ca, leo@wins.uva.nl,
The Making of a Geometric Algebra Package in Matlab Computer Science Department University of Waterloo Research Report CS-99-27 Stephen Mann, Leo Dorst, and Tim Bouma smann@cgl.uwaterloo.ca, leo@wins.uva.nl,
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Comparison of Probing Error in Dimensional Measurement by Means of 3D Computed Tomography with Circular and Helical Sampling
 nd International Symposium on NDT in Aerospace - We..A. Comparison of Probing Error in Dimensional Measurement by Means of D Computed Tomography with Circular and Helical Sampling Jochen HILLER, Stefan
nd International Symposium on NDT in Aerospace - We..A. Comparison of Probing Error in Dimensional Measurement by Means of D Computed Tomography with Circular and Helical Sampling Jochen HILLER, Stefan
COMPUTER GRAPHICS USING CONFORMAL GEOMETRIC ALGEBRA
 COMPUTER GRAPHICS USING CONFORMAL GEOMETRIC ALGEBRA Richard James Wareham Robinson College November 006 A dissertation submitted to the UNIVERSITY OF CAMBRIDGE for the degree of DOCTOR OF PHILOSOPHY SIGNAL
COMPUTER GRAPHICS USING CONFORMAL GEOMETRIC ALGEBRA Richard James Wareham Robinson College November 006 A dissertation submitted to the UNIVERSITY OF CAMBRIDGE for the degree of DOCTOR OF PHILOSOPHY SIGNAL
Improved Algorithm for Principal Curvature Estimation in Point Clouds due to Optimized Osculating Circle Fitting based on Geometric Algebra
 Improved Algorithm for Principal Curvature Estimation in Point Clouds due to Optimized Osculating Circle Fitting based on Geometric Algebra Roman Getto TU Darmstadt,Germany Departement of Computer Science
Improved Algorithm for Principal Curvature Estimation in Point Clouds due to Optimized Osculating Circle Fitting based on Geometric Algebra Roman Getto TU Darmstadt,Germany Departement of Computer Science
Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation
 Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation and the type of an object. Even simple scaling turns a
Geometric transformations assign a point to a point, so it is a point valued function of points. Geometric transformation may destroy the equation and the type of an object. Even simple scaling turns a
3D Game Engine Programming. Understanding Quaternions. Helping you build your dream game engine. Posted on June 25, 2012 by Jeremiah van Oosten
 3D Game Engine Programming Helping you build your dream game engine. Understanding Quaternions Posted on June 25, 2012 by Jeremiah van Oosten Understanding Quaternions In this article I will attempt to
3D Game Engine Programming Helping you build your dream game engine. Understanding Quaternions Posted on June 25, 2012 by Jeremiah van Oosten Understanding Quaternions In this article I will attempt to
Planar union of rectangles with sides parallel to the coordinate axis
 6 th International Conference on Applied Informatics Eger, Hungary, January 27 31, 2004. Planar union of rectangles with sides parallel to the coordinate axis Daniel Schmid, Hanspeter Bopp Department of
6 th International Conference on Applied Informatics Eger, Hungary, January 27 31, 2004. Planar union of rectangles with sides parallel to the coordinate axis Daniel Schmid, Hanspeter Bopp Department of
This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane?
 Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Intersecting Circles This blog addresses the question: how do we determine the intersection of two circles in the Cartesian plane? This is a problem that a programmer might have to solve, for example,
Geometric Algebra for Computer Science
 Geometric Algebra for Computer Science Geometric Algebra for Computer Science An Object-oriented Approach to Geometry LEO DORST DANIEL FONTIJNE STEPHEN MANN AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK
Geometric Algebra for Computer Science Geometric Algebra for Computer Science An Object-oriented Approach to Geometry LEO DORST DANIEL FONTIJNE STEPHEN MANN AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
CS184: Using Quaternions to Represent Rotation
 Page 1 of 5 CS 184 home page A note on these notes: These notes on quaternions were created as a resource for students taking CS184 at UC Berkeley. I am not doing any research related to quaternions and
Page 1 of 5 CS 184 home page A note on these notes: These notes on quaternions were created as a resource for students taking CS184 at UC Berkeley. I am not doing any research related to quaternions and
Design of Algorithms of Robot Vision Using Conformal Geometric Algebra
 International Mathematical Forum, 2, 2007, no. 20, 981-1005 Design of Algorithms of Robot Vision Using Conformal Geometric Algebra Luis Falcón-Morales Mathematics Department Tecnológico de Monterrey Guadalajara,
International Mathematical Forum, 2, 2007, no. 20, 981-1005 Design of Algorithms of Robot Vision Using Conformal Geometric Algebra Luis Falcón-Morales Mathematics Department Tecnológico de Monterrey Guadalajara,
Geometric Computing in Computer Graphics and Robotics using Conformal Geometric Algebra
 Geometric Computing in Computer Graphics and Robotics using Conformal Geometric Algebra Vom Fachbereich Informatik der Technischen Universität Darmstadt genehmigte Dissertation zur Erlangung des akademischen
Geometric Computing in Computer Graphics and Robotics using Conformal Geometric Algebra Vom Fachbereich Informatik der Technischen Universität Darmstadt genehmigte Dissertation zur Erlangung des akademischen
Arithmetic and Geometry: Uncomfortable Allies? Bill Cherowitzo University of Colorado Denver
 Arithmetic and Geometry: Uncomfortable Allies? Bill Cherowitzo University of Colorado Denver MAA Rocky Mountain Sectional Meeting April 25, 2008 In the beginning... there was Geometry Only ^ Euclid XII.2
Arithmetic and Geometry: Uncomfortable Allies? Bill Cherowitzo University of Colorado Denver MAA Rocky Mountain Sectional Meeting April 25, 2008 In the beginning... there was Geometry Only ^ Euclid XII.2
(Received February 18, 2005)
") 福井大学工学部研究報告第 53 巻第 1 号 2005 年 3 月 Mem. Fac. Eng. Univ. Fukui, Vol. 53, No. 1 (March 2005) The GeometricAlgebra Java Package Novel Structure Implementation of 5D Geometric Algebra R 4,1 for Object Oriented
福井大学工学部研究報告第 53 巻第 1 号 2005 年 3 月 Mem. Fac. Eng. Univ. Fukui, Vol. 53, No. 1 (March 2005) The GeometricAlgebra Java Package Novel Structure Implementation of 5D Geometric Algebra R 4,1 for Object Oriented
Stage 1 Place Value Calculations Geometry Fractions Data. Name and describe (using appropriate vocabulary) common 2d and 3d shapes
 common 2d and 3d shapes") Stage 1 Place Value Calculations Geometry Fractions Data YEAR 7 Working towards Read and write whole numbers in words and figures Mental methods for addition and subtraction, Name and describe (using appropriate
Stage 1 Place Value Calculations Geometry Fractions Data YEAR 7 Working towards Read and write whole numbers in words and figures Mental methods for addition and subtraction, Name and describe (using appropriate
Visualizing Quaternions
 Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 1 Tutorial 1 GRAND PLAN I: Fundamentals of Quaternions II: Visualizing Quaternion Geometry III: Quaternion
Visualizing Quaternions Andrew J. Hanson Computer Science Department Indiana University Siggraph 1 Tutorial 1 GRAND PLAN I: Fundamentals of Quaternions II: Visualizing Quaternion Geometry III: Quaternion
Revision Problems for Examination 2 in Algebra 1
 Centre for Mathematical Sciences Mathematics, Faculty of Science Revision Problems for Examination in Algebra. Let l be the line that passes through the point (5, 4, 4) and is at right angles to the plane
Centre for Mathematical Sciences Mathematics, Faculty of Science Revision Problems for Examination in Algebra. Let l be the line that passes through the point (5, 4, 4) and is at right angles to the plane
Rida Farouki from the University of California at Davis (UCD), USA, for inviting me to work with them. The work on random multivector variables and
, USA, for inviting me to work with them. The work on random multivector variables and") Preface Geometry is a pervasive mathematical concept that appears in many places and in many disguises. The representation of geometric entities, of their unions and intersections, and of their transformations
Preface Geometry is a pervasive mathematical concept that appears in many places and in many disguises. The representation of geometric entities, of their unions and intersections, and of their transformations
Game Mathematics. (12 Week Lesson Plan)
") Game Mathematics (12 Week Lesson Plan) Lesson 1: Set Theory Textbook: Chapter One (pgs. 1 15) We begin the course by introducing the student to a new vocabulary and set of rules that will be foundational
Game Mathematics (12 Week Lesson Plan) Lesson 1: Set Theory Textbook: Chapter One (pgs. 1 15) We begin the course by introducing the student to a new vocabulary and set of rules that will be foundational
Abstract. Introduction
 The efficient calculation of the Cartesian geometry of non-cartesian structures J.M. Freeman and D.G. Ford Engineering Control and Metrology Research Group, The School of Engineering, University of Huddersfield.
The efficient calculation of the Cartesian geometry of non-cartesian structures J.M. Freeman and D.G. Ford Engineering Control and Metrology Research Group, The School of Engineering, University of Huddersfield.
The Course Structure for the MCA Programme
 The Course Structure for the MCA Programme SEMESTER - I MCA 1001 Problem Solving and Program Design with C 3 (3-0-0) MCA 1003 Numerical & Statistical Methods 4 (3-1-0) MCA 1007 Discrete Mathematics 3 (3-0-0)
The Course Structure for the MCA Programme SEMESTER - I MCA 1001 Problem Solving and Program Design with C 3 (3-0-0) MCA 1003 Numerical & Statistical Methods 4 (3-1-0) MCA 1007 Discrete Mathematics 3 (3-0-0)
Stage 1 (intervention) Stage 2 Stage 3 Stage 4. Advanced 7-8. Secure 4-6
 Stage 2 Stage 3 Stage 4. Advanced 7-8. Secure 4-6") Stage 1 (intervention) Stage 2 Stage 3 Stage 4 YEAR 7 LAT Grade Emerging (not secondary read) 1-3 Secure 4-6 Advanced 7-8 Advanced + 9 YEAR 8 1 Emerging 2-3 Secure 4-6 Advanced 7-9 Autumn 1 Place Value
Stage 1 (intervention) Stage 2 Stage 3 Stage 4 YEAR 7 LAT Grade Emerging (not secondary read) 1-3 Secure 4-6 Advanced 7-8 Advanced + 9 YEAR 8 1 Emerging 2-3 Secure 4-6 Advanced 7-9 Autumn 1 Place Value
Prentice Hall Geometry 2011 Correlated to: Washington Mathematics Standards, Geometry (2008)
") Geometry G.1. Core Content: Logical arguments and proofs (Logic) Students formalize the reasoning skills they have developed in previous grades and solidify their understanding of what it means to prove
Geometry G.1. Core Content: Logical arguments and proofs (Logic) Students formalize the reasoning skills they have developed in previous grades and solidify their understanding of what it means to prove
Eduardo Bayro-Corrochano. Gerik Scheuermann. Editors. Geometric. Algebra. Computing. in Engineering. and Computer Science.
 Eduardo Bayro-Corrochano Gerik Scheuermann Editors Geometric Algebra Computing in Engineering and Computer Science & Springer Contents Part I Geometric Algebra New Tools for Computational Geometry and
Eduardo Bayro-Corrochano Gerik Scheuermann Editors Geometric Algebra Computing in Engineering and Computer Science & Springer Contents Part I Geometric Algebra New Tools for Computational Geometry and
Приложение 34 к приказу 949 от 29 сентября 2017 г. MOSCOW AVIATION INSTITUTE (NATIONAL RESEARCH UNIVERSITY)
") Приложение 34 к приказу 949 от 29 сентября 2017 г. MOSCOW AVIATION INSTITUTE (NATIONAL RESEARCH UNIVERSITY) The Program for Entrance Exam in Mathematics MAI 2018 The first section lists the basic mathematical
Приложение 34 к приказу 949 от 29 сентября 2017 г. MOSCOW AVIATION INSTITUTE (NATIONAL RESEARCH UNIVERSITY) The Program for Entrance Exam in Mathematics MAI 2018 The first section lists the basic mathematical
Final Exam 1:15-3:15 pm Thursday, December 13, 2018
 Final Exam 1:15-3:15 pm Thursday, December 13, 2018 Instructions: Answer all questions in the space provided (or attach additional pages as needed). You are permitted to use pencils/pens, one cheat sheet
Final Exam 1:15-3:15 pm Thursday, December 13, 2018 Instructions: Answer all questions in the space provided (or attach additional pages as needed). You are permitted to use pencils/pens, one cheat sheet
GEOMETRY HONORS COORDINATE GEOMETRY PACKET
 GEOMETRY HONORS COORDINATE GEOMETRY PACKET Name Period 1 Day 1 - Directed Line Segments DO NOW Distance formula 1 2 1 2 2 2 D x x y y Midpoint formula x x, y y 2 2 M 1 2 1 2 Slope formula y y m x x 2 1
GEOMETRY HONORS COORDINATE GEOMETRY PACKET Name Period 1 Day 1 - Directed Line Segments DO NOW Distance formula 1 2 1 2 2 2 D x x y y Midpoint formula x x, y y 2 2 M 1 2 1 2 Slope formula y y m x x 2 1
DD2429 Computational Photography :00-19:00
 . Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
. Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
The Pythagorean Theorem: Prove it!!
 The Pythagorean Theorem: Prove it!! 2 2 a + b = c 2 The following development of the relationships in a right triangle and the proof of the Pythagorean Theorem that follows were attributed to President
The Pythagorean Theorem: Prove it!! 2 2 a + b = c 2 The following development of the relationships in a right triangle and the proof of the Pythagorean Theorem that follows were attributed to President
Today. Today. Introduction. Matrices. Matrices. Computergrafik. Transformations & matrices Introduction Matrices
 Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
1 Historical Notes. Kinematics 5: Quaternions
 1 Historical Notes Quaternions were invented by the Irish mathematician William Rowan Hamilton in the late 1890s. The story goes 1 that Hamilton has pondered the problem of dividing one vector by another
1 Historical Notes Quaternions were invented by the Irish mathematician William Rowan Hamilton in the late 1890s. The story goes 1 that Hamilton has pondered the problem of dividing one vector by another
Introduction to Transformations. In Geometry
 + Introduction to Transformations In Geometry + What is a transformation? A transformation is a copy of a geometric figure, where the copy holds certain properties. Example: copy/paste a picture on your
+ Introduction to Transformations In Geometry + What is a transformation? A transformation is a copy of a geometric figure, where the copy holds certain properties. Example: copy/paste a picture on your
Mathematics Appendix 1: Examples of formal written methods for addition, subtraction, multiplication and division
 Mathematics Appendix 1: Examples of formal written methods for addition, subtraction, multiplication and division This appendix sets out some examples of formal written methods for all four operations
Mathematics Appendix 1: Examples of formal written methods for addition, subtraction, multiplication and division This appendix sets out some examples of formal written methods for all four operations
Implementation of a Clifford Algebra Co-Processor Design on a Field Programmable Gate Array
 This is page 1 Printer: Opaque this Implementation of a Clifford Algebra Co-Processor Design on a Field Programmable Gate Array Christian Perwass Christian Gebken Gerald Sommer ABSTRACT We present the
This is page 1 Printer: Opaque this Implementation of a Clifford Algebra Co-Processor Design on a Field Programmable Gate Array Christian Perwass Christian Gebken Gerald Sommer ABSTRACT We present the
16.6. Parametric Surfaces. Parametric Surfaces. Parametric Surfaces. Vector Calculus. Parametric Surfaces and Their Areas
 16 Vector Calculus 16.6 and Their Areas Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and Their Areas Here we use vector functions to describe more general
16 Vector Calculus 16.6 and Their Areas Copyright Cengage Learning. All rights reserved. Copyright Cengage Learning. All rights reserved. and Their Areas Here we use vector functions to describe more general
Doyle Spiral Circle Packings Animated
 Doyle Spiral Circle Packings Animated Alan Sutcliffe 4 Binfield Road Wokingham RG40 1SL, UK E-mail: nsutcliffe@ntlworld.com Abstract Doyle spiral circle packings are described. Two such packings illustrate
Doyle Spiral Circle Packings Animated Alan Sutcliffe 4 Binfield Road Wokingham RG40 1SL, UK E-mail: nsutcliffe@ntlworld.com Abstract Doyle spiral circle packings are described. Two such packings illustrate
Rotation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J. Fowler, WesternGeco.
 otation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J Fowler, WesternGeco Summary Symmetry groups commonly used to describe seismic anisotropy
otation parameters for model building and stable parameter inversion in orthorhombic media Cintia Lapilli* and Paul J Fowler, WesternGeco Summary Symmetry groups commonly used to describe seismic anisotropy
New Technologies For The Real 3D Reference Point Determination
 New Technologies For The Real 3D Reference Point Determination Maria Hennes, Cornelia Eschelbach GIK, Geodetic Institute of the University of Karlsruhe, Germany Contact author: Maria Hennes, e-mail: hennes@gik.uni-karlsruhe.de
New Technologies For The Real 3D Reference Point Determination Maria Hennes, Cornelia Eschelbach GIK, Geodetic Institute of the University of Karlsruhe, Germany Contact author: Maria Hennes, e-mail: hennes@gik.uni-karlsruhe.de
Year 7 Knowledge/Content Understanding Skills Students will
 Age Related Expectations in KS3 Maths 2017-2018 Year 7 Knowledge/Content Understanding Skills Use the vocabulary of prime numbers, factors (or divisors), multiples, common factors, common multiples, highest
Age Related Expectations in KS3 Maths 2017-2018 Year 7 Knowledge/Content Understanding Skills Use the vocabulary of prime numbers, factors (or divisors), multiples, common factors, common multiples, highest
Extended Mathematics for Cambridge IGCSE by David Rayner. Chapter 1. Identify and use rational and irrational numbers, real numbers.
 Schemes of Work Overview Structure There are two separate schemes of work laid out in the following units, one for students following the Core Curriculum and one for students following the Extended Curriculum.
Schemes of Work Overview Structure There are two separate schemes of work laid out in the following units, one for students following the Core Curriculum and one for students following the Extended Curriculum.
Rational Trigonometry Applied to Robotics
 Robot Kinematic Modeling using Rational Trigonometry 6 de Novembro de 2007 Overview Overview 1 Overview 2 3 The Fixed Frames Model for Robot Kinematics 4 Conclusions 4 Perspectives and Future Work 5 Q&A
Robot Kinematic Modeling using Rational Trigonometry 6 de Novembro de 2007 Overview Overview 1 Overview 2 3 The Fixed Frames Model for Robot Kinematics 4 Conclusions 4 Perspectives and Future Work 5 Q&A
Advances in Metric-neutral Visualization
 Advances in Metric-neutral Visualization Charles Gunn Institut für Mathematik Geometry and Visualization Group Technisches Universität Berlin GraVisMa 2010, Brno, October 7, 2010 Overview The talk will
Advances in Metric-neutral Visualization Charles Gunn Institut für Mathematik Geometry and Visualization Group Technisches Universität Berlin GraVisMa 2010, Brno, October 7, 2010 Overview The talk will
1 Appendix to notes 2, on Hyperbolic geometry:
 1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
Mathematically, the path or the trajectory of a particle moving in space in described by a function of time.
 Module 15 : Vector fields, Gradient, Divergence and Curl Lecture 45 : Curves in space [Section 45.1] Objectives In this section you will learn the following : Concept of curve in space. Parametrization
Module 15 : Vector fields, Gradient, Divergence and Curl Lecture 45 : Curves in space [Section 45.1] Objectives In this section you will learn the following : Concept of curve in space. Parametrization
Rotation and Orientation: Fundamentals. Perelyaev Sergei VARNA, 2011
 Rotation and Orientation: Fundamentals Perelyaev Sergei VARNA, 0 What is Rotation? Not intuitive Formal definitions are also confusing Many different ways to describe Rotation (direction cosine) matri
Rotation and Orientation: Fundamentals Perelyaev Sergei VARNA, 0 What is Rotation? Not intuitive Formal definitions are also confusing Many different ways to describe Rotation (direction cosine) matri
A Detailed Look into Forward and Inverse Kinematics
 A Detailed Look into Forward and Inverse Kinematics Kinematics = Study of movement, motion independent of the underlying forces that cause them September 19-26, 2016 Kinematics Preliminaries Preliminaries:
A Detailed Look into Forward and Inverse Kinematics Kinematics = Study of movement, motion independent of the underlying forces that cause them September 19-26, 2016 Kinematics Preliminaries Preliminaries:
Motivation. Parametric Curves (later Surfaces) Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)
 Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)") Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
1 Transforming Geometric Objects
 1 Transforming Geometric Objects RIGID MOTION TRANSFORMA- TIONS Rigid Motions Transformations 1 Translating Plane Figures Reflecting Plane Figures Rotating Plane Figures Students will select translations
1 Transforming Geometric Objects RIGID MOTION TRANSFORMA- TIONS Rigid Motions Transformations 1 Translating Plane Figures Reflecting Plane Figures Rotating Plane Figures Students will select translations
Richard Lander School Maths Key Stage 3
 Richard Lander School Maths Key Stage 3 Richard Lander School is a maintained school which follows the National Curriculum at both Key Stage 3 and Key Stage 4. Purpose of study Mathematics is a creative
Richard Lander School Maths Key Stage 3 Richard Lander School is a maintained school which follows the National Curriculum at both Key Stage 3 and Key Stage 4. Purpose of study Mathematics is a creative
Computational Geometry. Geometry Cross Product Convex Hull Problem Sweep Line Algorithm
 GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
GEOMETRY COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Computational
A Singular Example for the Averaged Mean Curvature Flow
 To appear in Experimental Mathematics Preprint Vol. No. () pp. 3 7 February 9, A Singular Example for the Averaged Mean Curvature Flow Uwe F. Mayer Abstract An embedded curve is presented which under numerical
To appear in Experimental Mathematics Preprint Vol. No. () pp. 3 7 February 9, A Singular Example for the Averaged Mean Curvature Flow Uwe F. Mayer Abstract An embedded curve is presented which under numerical
Plane Based Free Stationing for Building Models
 Christian MANTHE, Germany Key words: plane based building model, plane detection, plane based transformation SUMMARY 3D Building models are used to construct, manage and rebuild buildings. Thus, associated
Christian MANTHE, Germany Key words: plane based building model, plane detection, plane based transformation SUMMARY 3D Building models are used to construct, manage and rebuild buildings. Thus, associated
Prentice Hall Mathematics Course Correlated to: Archdiocese of Chicago (Illinois) Mathematics Curriculum Frameworks (2004) Grades 6-12
 Mathematics Curriculum Frameworks (2004) Grades 6-12") Archdiocese of Chicago (Illinois) Mathematics Curriculum Frameworks (2004) Grades 6-12 Goal Outcome Outcome Statement Priority Code Chapter Topic 6 6.01 6.06.01 - Represent place values from millionths
Archdiocese of Chicago (Illinois) Mathematics Curriculum Frameworks (2004) Grades 6-12 Goal Outcome Outcome Statement Priority Code Chapter Topic 6 6.01 6.06.01 - Represent place values from millionths
Situation 1: Congruent Triangles vs. Similar Triangles
 Situation 1: Congruent Triangles vs. Similar Triangles Prepared at the University of Georgia EMAT 6500 Date last revised: July 24 th, 2013 Nicolina Scarpelli Prompt: A teacher in a high school Analytic
Situation 1: Congruent Triangles vs. Similar Triangles Prepared at the University of Georgia EMAT 6500 Date last revised: July 24 th, 2013 Nicolina Scarpelli Prompt: A teacher in a high school Analytic
Numerical methods in physics
 Numerical methods in physics Marc Wagner Goethe-Universität Frankfurt am Main summer semester 2018 Version: April 9, 2018 1 Contents 1 Introduction 3 2 Representation of numbers in computers, roundoff
Numerical methods in physics Marc Wagner Goethe-Universität Frankfurt am Main summer semester 2018 Version: April 9, 2018 1 Contents 1 Introduction 3 2 Representation of numbers in computers, roundoff
A case study in geometric algebra: Fitting room models to 3D point clouds
 BSC THESIS (15 ECTS) A case study in geometric algebra: Fitting room models to 3D point clouds Author: Moos HUETING July 15, 2011 Supervisors: Dr. Marcel WORRING Dr. Daniël FONTIJNE Abstract Many geometrical
BSC THESIS (15 ECTS) A case study in geometric algebra: Fitting room models to 3D point clouds Author: Moos HUETING July 15, 2011 Supervisors: Dr. Marcel WORRING Dr. Daniël FONTIJNE Abstract Many geometrical
Tier 2: GEOMETRY INTRODUCTION TO GEOMETRY Lessons Abbreviation Key Table... 7 G1 LESSON: WHAT IS GEOMETRY?... 8 G1E... 9 G1EA...
 Craig Hane, Ph.D., Founder Tier 2: GEOMETRY INTRODUCTION TO GEOMETRY... 6 1.1 Lessons Abbreviation Key Table... 7 G1 LESSON: WHAT IS GEOMETRY?... 8 G1E... 9 G1EA... 10 G2 LESSON: STRAIGHT LINES AND ANGLES...
Craig Hane, Ph.D., Founder Tier 2: GEOMETRY INTRODUCTION TO GEOMETRY... 6 1.1 Lessons Abbreviation Key Table... 7 G1 LESSON: WHAT IS GEOMETRY?... 8 G1E... 9 G1EA... 10 G2 LESSON: STRAIGHT LINES AND ANGLES...
1 Transforming Geometric Objects
 1 Transforming Geometric Objects Topic 1: Rigid Motion Transformations Rigid Motion Transformations Topic 2: Similarity Translating Plane Figures Reflecting Plane Figures Rotating Plane Figures Students
1 Transforming Geometric Objects Topic 1: Rigid Motion Transformations Rigid Motion Transformations Topic 2: Similarity Translating Plane Figures Reflecting Plane Figures Rotating Plane Figures Students