Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich. LSD-SLAM: Large-Scale Direct Monocular SLAM
|
|
|
- Abel Bruce
- 6 years ago
- Views:
Transcription


1 Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel, Schöps, Cremers Camera Motion and Scene Geometry 1


2 2 Live Operation real-time operation on laptop (no GPU)








3 3 (Some) Related Work Structure from Motion Causally Integrated Over Time. Chiuso, Favaro, Jin, Soatto; PAMI 02 Scalable monocular SLAM. Eade, Drummond; CVPR 06 MonoSLAM: Real-time single camera SLAM. Davison, Reid, Molton, Stasse; PAMI 07 Visual Odometry. Nistér, Naroditsky, Bergen; CVPR 04 Parallel Tracking and Mapping for Small AR Workspaces. Klein, Murray; ISMAR 07 Scale Drift-Aware Large Scale Monocular SLAM. Strasdat, Montiel, Davison; RSS 10 DTAM: Dense Tracking and Mapping in Real-Time. Newcombe, Lovegrove, Davison; ICCV 11 SVO: Fast Semi-Direct Monocular Visual Odometry. Forster, Pizzoli, Scaramuzza; ICRA 14

 Direct (LSD-SLAM) Input Images")


 keep full image photometric")
4 4 LSD-SLAM: what s new? Keypoint-Based Input Images Extract & Match Features (SIFT / SURF / BRIEF /...) Direct (LSD-SLAM) Input Images abstract images to feature observations Track: min. reprojection error (point distances) Map: est. feature-parameters (3D points / normals) keep full image Track: min. photometric error (intensity difference) Map: est. per-pixel depth (semi-dense depth map)

5 ...and why do that? can only use & reconstruct corners can use & reconstruct whole image Engel, Schöps, Cremers 5
6 6 Overview Input Video Depth Estimation Map Optimization Tracking Current KF Add to Map
7 7 Overview Input Video 30Hz Depth Estimation Map Optimization Tracking SE(3) alignment to current KF Current KF Add to Map
8 8 Tracking KF image KF depth
9 8 Tracking Camera Pose in KF image KF depth back-warped new frame
10 8 Tracking Camera Pose in KF image KF depth back-warped new frame
11 8 Tracking Camera Pose in KF image KF depth back-warped new frame minimize using Gauss-Newton Algorithm ( forward-compositional Lucas-Kanade)
12 9 Tracking multi-resolution (track large motions) Huber norm instead of L2 (outliers & occlusions) statistical normalization (respect depth- and pixel-noise) single core timings: 320x240: 5-10ms 640x480: 20-30ms
13 10 Overview Input Video 30Hz Depth Estimation Map Optimization Tracking SE(3) alignment to current KF Current KF Add to Map
14 11 Overview Input Video 30Hz Tracking SE(3) alignment to current KF Depth Estimation Create new KF Take KF? Refine KF Map Optimization Current KF Add to Map

15 Depth Estimation image inverse depth inverse depth variance pixelwise filtering (exploit video) small-baseline large baseline information selection only do stereo if sufficient information gain edge-preserving smoothing distance-based KF selection [Engel, Sturm, Cremers; ICCV 13] Engel, Schöps, Cremers 12
16 13 Overview Input Video 30Hz Tracking SE(3) alignment to current KF Depth Estimation Create new KF Take KF? Refine KF Map Optimization Current KF Add to Map

17 14 Overview Input Video 30Hz Tracking SE(3) alignment to current KF Depth Estimation Create new KF Take KF? Refine KF Map Optimization Current KF Add to Map
 pose-graph Tracking SE(3)")
 alignment to all nearby KFs Optional: FabMap for")
18 15 Input Video 30Hz Overview Depth Estimation Take KF? Map Optimization Sim(3) pose-graph Tracking SE(3) alignment to current KF Create new KF Refine KF Current KF Add to Map Sim(3) alignment to all nearby KFs Optional: FabMap for large loops
19 16 Global Mapping
20 16 Global Mapping Direct Tracking with scale (on Sim(3)): with (warped point)
21 16 Global Mapping Direct Tracking with scale (on Sim(3)): with (warped point)
22 16 Global Mapping Direct Tracking with scale (on Sim(3)): with (warped point) + GN optimization + multi-resolution + Huber norm + statistical norm.
23 16 Global Mapping Direct Tracking with scale (on Sim(3)): with (warped point) + GN optimization + multi-resolution + Huber norm + statistical norm. Optimize pose-graph on Sim(3)

24 17 Global Mapping
25 18 Input Video 30Hz Overview Depth Estimation Take KF? Map Optimization Sim(3) pose-graph Tracking SE(3) alignment to current KF Create new KF Refine KF Current KF Add to Map Sim(3) alignment to all nearby KFs Optional: FabMap for large loops
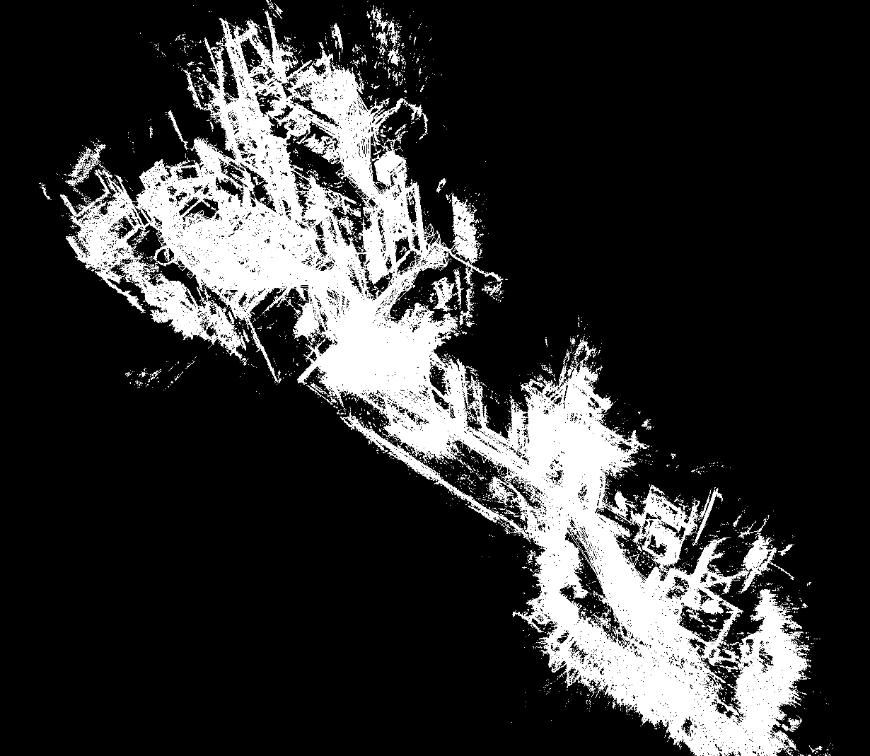
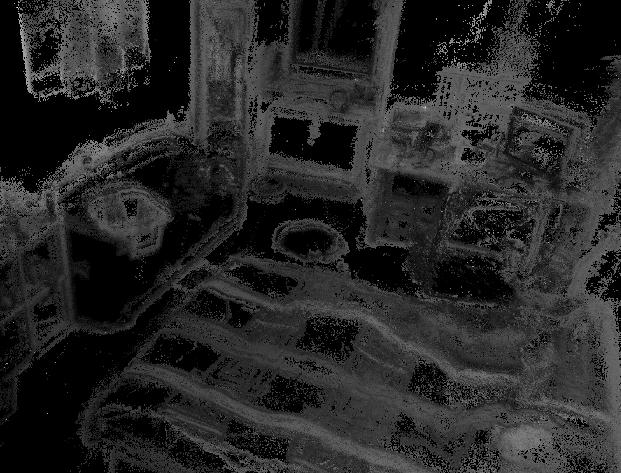
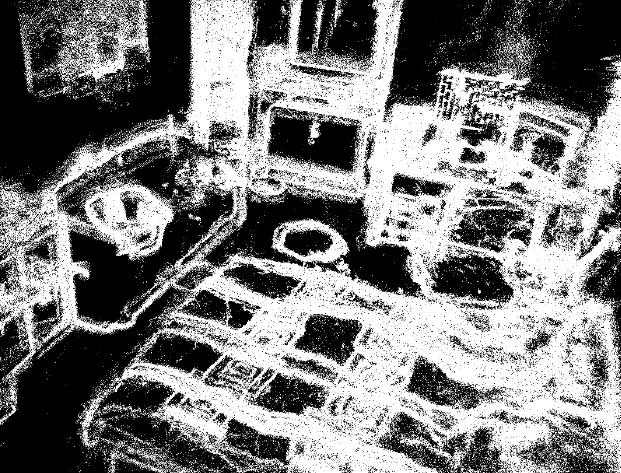
26 19 Results 6 minutes, 640x480@50fps: Tracked Frames, 800 Keyframes; Constraints; 51 Million Points

27 20 Results 12 minutes, Tracked Frames, Keyframes; Constraints; 100 Million Points

28 21 Results Semi-Dense Visual Odometry for AR on a Smartphone; T. Schöps, J. Engel, D. Cremers; ISMAR 14.
29 22 Key Ingredients Direct Tracking

30 22 Key Ingredients Direct Tracking Semi-Dense Stereo filter over many small-baseline frames strict information selection Pose-Graph on Sim(3)






31 LSD-SLAM Large-scale direct mono-slam Fully direct (no keypoints / features) Real-time even on CPU Open-source code & data-sets Engel, Schöps, Cremers 23
Semi-Dense Direct SLAM
 Computer Vision Group Technical University of Munich Jakob Engel Jakob Engel, Daniel Cremers David Caruso, Thomas Schöps, Lukas von Stumberg, Vladyslav Usenko, Jörg Stückler, Jürgen Sturm Technical University
Computer Vision Group Technical University of Munich Jakob Engel Jakob Engel, Daniel Cremers David Caruso, Thomas Schöps, Lukas von Stumberg, Vladyslav Usenko, Jörg Stückler, Jürgen Sturm Technical University
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs
 FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene Robust Robotics Group, MIT CSAIL LPM Workshop IROS 2017 September 28, 2017 with Nicholas Roy 1
FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene Robust Robotics Group, MIT CSAIL LPM Workshop IROS 2017 September 28, 2017 with Nicholas Roy 1
3D Scene Reconstruction with a Mobile Camera
 3D Scene Reconstruction with a Mobile Camera 1 Introduction Robert Carrera and Rohan Khanna Stanford University: CS 231A Autonomous supernumerary arms, or "third arms", while still unconventional, hold
3D Scene Reconstruction with a Mobile Camera 1 Introduction Robert Carrera and Rohan Khanna Stanford University: CS 231A Autonomous supernumerary arms, or "third arms", while still unconventional, hold
15 Years of Visual SLAM
 15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
Dense 3D Reconstruction from Autonomous Quadrocopters
 Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm Autonomous Quadrocopters
Monocular Visual Odometry: Sparse Joint Optimisation or Dense Alternation?
 Monocular Visual Odometry: Sparse Joint Optimisation or Dense Alternation? Lukas Platinsky 1, Andrew J. Davison 1, and Stefan Leutenegger 1 Abstract Real-time monocular SLAM is increasingly mature and
Monocular Visual Odometry: Sparse Joint Optimisation or Dense Alternation? Lukas Platinsky 1, Andrew J. Davison 1, and Stefan Leutenegger 1 Abstract Real-time monocular SLAM is increasingly mature and
Hybrids Mixed Approaches
 Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Direct Methods for 3D Reconstruction and Visual SLAM
 03-01 15th IAPR International Conference on Machine Vision Applications (MVA) Nagoya University, Nagoya, Japan, May 8-12, 2017. Direct Methods for 3D Reconstruction and Visual SLAM Daniel Cremers Departments
03-01 15th IAPR International Conference on Machine Vision Applications (MVA) Nagoya University, Nagoya, Japan, May 8-12, 2017. Direct Methods for 3D Reconstruction and Visual SLAM Daniel Cremers Departments
Semi-Direct EKF-based Monocular Visual-Inertial Odometry
 Semi-Direct EKF-based Monocular Visual-Inertial Odometry Petri Tanskanen 1, Tobias Naegeli 2, Marc Pollefeys 1 and Otmar Hilliges 2 Abstract We propose a novel monocular visual inertial odometry algorithm
Semi-Direct EKF-based Monocular Visual-Inertial Odometry Petri Tanskanen 1, Tobias Naegeli 2, Marc Pollefeys 1 and Otmar Hilliges 2 Abstract We propose a novel monocular visual inertial odometry algorithm
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza
 Davide Scaramuzza") Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
Lecture 10 Multi-view Stereo (3D Dense Reconstruction) Davide Scaramuzza REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time, ICRA 14, by Pizzoli, Forster, Scaramuzza [M. Pizzoli, C. Forster,
PL-SVO: Semi-Direct Monocular Visual Odometry by Combining Points and Line Segments
 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Daejeon Convention Center October 9-14, 2016, Daejeon, Korea PL-SVO: Semi-Direct Monocular Visual Odometry by Combining Points
2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Daejeon Convention Center October 9-14, 2016, Daejeon, Korea PL-SVO: Semi-Direct Monocular Visual Odometry by Combining Points
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras
 Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras Hidenobu Matsuki 1,2, Lukas von Stumberg 2,3, Vladyslav Usenko 2, Jörg Stückler 2 and Daniel Cremers 2 Abstract We propose a novel real-time
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras Hidenobu Matsuki 1,2, Lukas von Stumberg 2,3, Vladyslav Usenko 2, Jörg Stückler 2 and Daniel Cremers 2 Abstract We propose a novel real-time
An Evaluation of Robust Cost Functions for RGB Direct Mapping
 An Evaluation of Robust Cost Functions for RGB Direct Mapping Alejo Concha and Javier Civera Abstract The so-called direct SLAM methods have shown an impressive performance in estimating a dense 3D reconstruction
An Evaluation of Robust Cost Functions for RGB Direct Mapping Alejo Concha and Javier Civera Abstract The so-called direct SLAM methods have shown an impressive performance in estimating a dense 3D reconstruction
Research Article A Novel Metric Online Monocular SLAM Approach for Indoor Applications
 Scientific Programming Volume 216, Article ID 536978, 8 pages http://dx.doi.org/1.1155/216/536978 Research Article A Novel Metric Online Monocular SLAM Approach for Indoor Applications Yongfei Li, Shicheng
Scientific Programming Volume 216, Article ID 536978, 8 pages http://dx.doi.org/1.1155/216/536978 Research Article A Novel Metric Online Monocular SLAM Approach for Indoor Applications Yongfei Li, Shicheng
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Visual-Inertial Localization and Mapping for Robot Navigation
 Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Probabilistic Semi-Dense Mapping from Highly Accurate Feature-Based Monocular SLAM
 Probabilistic Semi-Dense Mapping from Highly Accurate Feature-Based Monocular SLAM Raúl Mur-Artal and Juan D. Tardós Instituto de Investigación en Ingeniería de Aragón (I3A), Universidad de Zaragoza, Spain
Probabilistic Semi-Dense Mapping from Highly Accurate Feature-Based Monocular SLAM Raúl Mur-Artal and Juan D. Tardós Instituto de Investigación en Ingeniería de Aragón (I3A), Universidad de Zaragoza, Spain
NID-SLAM: Robust Monocular SLAM using Normalised Information Distance
 NID-SLAM: Robust Monocular SLAM using Normalised Information Distance Geoffrey Pascoe, Will Maddern, Michael Tanner, Pedro Pinie s and Paul Newman Oxford Robotics Institute University of Oxford, UK {gmp,wm,mtanner,ppinies,pnewman}@robots.ox.ac.uk
NID-SLAM: Robust Monocular SLAM using Normalised Information Distance Geoffrey Pascoe, Will Maddern, Michael Tanner, Pedro Pinie s and Paul Newman Oxford Robotics Institute University of Oxford, UK {gmp,wm,mtanner,ppinies,pnewman}@robots.ox.ac.uk
WHITE PAPER Scale-Awareness of Light Field Camera Based Visual Odometry
 WHITE PAPER www.visteon.com Scale-Awareness of Light Field Camera Based isual Odometry Scale-Awareness of Light Field Camera based isual Odometry Niclas Zeller 1,2,3 and Franz Quint 2 and Uwe Stilla 1
WHITE PAPER www.visteon.com Scale-Awareness of Light Field Camera Based isual Odometry Scale-Awareness of Light Field Camera based isual Odometry Niclas Zeller 1,2,3 and Franz Quint 2 and Uwe Stilla 1
Direct Multichannel Tracking
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Direct Multichannel Tracking Jaramillo, C.; Taguchi, Y.; Feng, C. TR2017-146 October 2017 Abstract We present direct multichannel tracking,
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Direct Multichannel Tracking Jaramillo, C.; Taguchi, Y.; Feng, C. TR2017-146 October 2017 Abstract We present direct multichannel tracking,
Application of LSD-SLAM for Visualization Temperature in Wide-area Environment
 Application of LSD-SLAM for Visualization Temperature in Wide-area Environment Masahiro Yamaguchi 1, Hideo Saito 1 and Shoji Yachida 2 1 Graduate School of Science and Technology, Keio University, 3-14-1
Application of LSD-SLAM for Visualization Temperature in Wide-area Environment Masahiro Yamaguchi 1, Hideo Saito 1 and Shoji Yachida 2 1 Graduate School of Science and Technology, Keio University, 3-14-1
arxiv: v1 [cs.cv] 23 Apr 2017
![arxiv: v1 [cs.cv] 23 Apr 2017](/thumbs/75/72430434.jpg "arxiv: v1 [cs.cv] 23 Apr 2017") Proxy Templates for Inverse Compositional Photometric Bundle Adjustment Christopher Ham, Simon Lucey 2, and Surya Singh Robotics Design Lab 2 Robotics Institute The University of Queensland, Australia
Proxy Templates for Inverse Compositional Photometric Bundle Adjustment Christopher Ham, Simon Lucey 2, and Surya Singh Robotics Design Lab 2 Robotics Institute The University of Queensland, Australia
arxiv: v1 [cs.cv] 13 Nov 2016 Abstract
![arxiv: v1 [cs.cv] 13 Nov 2016 Abstract](/thumbs/76/74154168.jpg "arxiv: v1 [cs.cv] 13 Nov 2016 Abstract") Semi-Dense 3D Semantic Mapping from Monocular SLAM Xuanpeng LI Southeast University 2 Si Pai Lou, Nanjing, China li xuanpeng@seu.edu.cn Rachid Belaroussi IFSTTAR, COSYS/LIVIC 25 allée des Marronniers,
Semi-Dense 3D Semantic Mapping from Monocular SLAM Xuanpeng LI Southeast University 2 Si Pai Lou, Nanjing, China li xuanpeng@seu.edu.cn Rachid Belaroussi IFSTTAR, COSYS/LIVIC 25 allée des Marronniers,
Towards Robust Visual Odometry with a Multi-Camera System
 Towards Robust Visual Odometry with a Multi-Camera System Peidong Liu 1, Marcel Geppert 1, Lionel Heng 2, Torsten Sattler 1, Andreas Geiger 1,3, and Marc Pollefeys 1,4 Abstract We present a visual odometry
Towards Robust Visual Odometry with a Multi-Camera System Peidong Liu 1, Marcel Geppert 1, Lionel Heng 2, Torsten Sattler 1, Andreas Geiger 1,3, and Marc Pollefeys 1,4 Abstract We present a visual odometry
Visual-SLAM Algorithms: a Survey from 2010 to 2016
 Taketomi et al. REVIEW Visual-SLAM Algorithms: a Survey from 2010 to 2016 Takafumi Taketomi 1*, Hideaki Uchiyama 2 and Sei Ikeda 3 Abstract SLAM is an abbreviation for simultaneous localization and mapping,
Taketomi et al. REVIEW Visual-SLAM Algorithms: a Survey from 2010 to 2016 Takafumi Taketomi 1*, Hideaki Uchiyama 2 and Sei Ikeda 3 Abstract SLAM is an abbreviation for simultaneous localization and mapping,
Direct Visual Odometry for a Fisheye-Stereo Camera
 Direct Visual Odometry for a Fisheye-Stereo Camera Peidong Liu, Lionel Heng, Torsten Sattler, Andreas Geiger,3, and Marc Pollefeys,4 Abstract We present a direct visual odometry algorithm for a fisheye-stereo
Direct Visual Odometry for a Fisheye-Stereo Camera Peidong Liu, Lionel Heng, Torsten Sattler, Andreas Geiger,3, and Marc Pollefeys,4 Abstract We present a direct visual odometry algorithm for a fisheye-stereo
Visual-Inertial RGB-D SLAM for Mobile Augmented Reality
 Visual-Inertial RGB-D SLAM for Mobile Augmented Reality Williem 1, Andre Ivan 1, Hochang Seok 2, Jongwoo Lim 2, Kuk-Jin Yoon 3, Ikhwan Cho 4, and In Kyu Park 1 1 Department of Information and Communication
Visual-Inertial RGB-D SLAM for Mobile Augmented Reality Williem 1, Andre Ivan 1, Hochang Seok 2, Jongwoo Lim 2, Kuk-Jin Yoon 3, Ikhwan Cho 4, and In Kyu Park 1 1 Department of Information and Communication
DPPTAM: Dense Piecewise Planar Tracking and Mapping from a Monocular Sequence
 DPPTAM: Dense Piecewise Planar Tracking and Mapping from a Monocular Sequence Alejo Concha I3A Universidad de Zaragoza, Spain alejocb@unizar.es Javier Civera I3A Universidad de Zaragoza, Spain jcivera@unizar.es
DPPTAM: Dense Piecewise Planar Tracking and Mapping from a Monocular Sequence Alejo Concha I3A Universidad de Zaragoza, Spain alejocb@unizar.es Javier Civera I3A Universidad de Zaragoza, Spain jcivera@unizar.es
Visual SLAM for small Unmanned Aerial Vehicles
 Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
Visual SLAM algorithms: a survey from 2010 to 2016
 Taketomi et al. IPSJ Transactions on Computer Vision and Applications (2017) 9:16 DOI 10.1186/s41074-017-0027-2 IPSJ Transactions on Computer Vision and Applications REVIEW PAPER Visual SLAM algorithms:
Taketomi et al. IPSJ Transactions on Computer Vision and Applications (2017) 9:16 DOI 10.1186/s41074-017-0027-2 IPSJ Transactions on Computer Vision and Applications REVIEW PAPER Visual SLAM algorithms:
MonoRGBD-SLAM: Simultaneous Localization and Mapping Using Both Monocular and RGBD Cameras
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com MonoRGBD-SLAM: Simultaneous Localization and Mapping Using Both Monocular and RGBD Cameras Yousif, K.; Taguchi, Y.; Ramalingam, S. TR2017-068
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com MonoRGBD-SLAM: Simultaneous Localization and Mapping Using Both Monocular and RGBD Cameras Yousif, K.; Taguchi, Y.; Ramalingam, S. TR2017-068
Hidden View Synthesis using Real-Time Visual SLAM for Simplifying Video Surveillance Analysis
 2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Hidden View Synthesis using Real-Time Visual SLAM for Simplifying
2011 IEEE International Conference on Robotics and Automation Shanghai International Conference Center May 9-13, 2011, Shanghai, China Hidden View Synthesis using Real-Time Visual SLAM for Simplifying
Vol agile avec des micro-robots volants contrôlés par vision
 Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
SLAM II: SLAM for robotic vision-based perception
 SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
πmatch: Monocular vslam and Piecewise Planar Reconstruction using Fast Plane Correspondences
 πmatch: Monocular vslam and Piecewise Planar Reconstruction using Fast Plane Correspondences Carolina Raposo and João P. Barreto Institute of Systems and Robotics, University of Coimbra, Portugal {carolinaraposo,jpbar}@isr.uc.pt
πmatch: Monocular vslam and Piecewise Planar Reconstruction using Fast Plane Correspondences Carolina Raposo and João P. Barreto Institute of Systems and Robotics, University of Coimbra, Portugal {carolinaraposo,jpbar}@isr.uc.pt
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
CVPR 2014 Visual SLAM Tutorial Kintinuous
 CVPR 2014 Visual SLAM Tutorial Kintinuous kaess@cmu.edu The Robotics Institute Carnegie Mellon University Recap: KinectFusion [Newcombe et al., ISMAR 2011] RGB-D camera GPU 3D/color model RGB TSDF (volumetric
CVPR 2014 Visual SLAM Tutorial Kintinuous kaess@cmu.edu The Robotics Institute Carnegie Mellon University Recap: KinectFusion [Newcombe et al., ISMAR 2011] RGB-D camera GPU 3D/color model RGB TSDF (volumetric
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
EVALUATION OF THE VISUAL ODOMETRY METHODS FOR SEMI-DENSE REAL-TIME
 Advanced Computing: An International Journal (ACIJ), Vol.9, No.2, March 2018 EVALUATION OF THE VISUAL ODOMETRY METHODS FOR SEMI-DENSE REAL-TIME HAIDARA Gaoussou and PENG Dewei School of Computer Science
Advanced Computing: An International Journal (ACIJ), Vol.9, No.2, March 2018 EVALUATION OF THE VISUAL ODOMETRY METHODS FOR SEMI-DENSE REAL-TIME HAIDARA Gaoussou and PENG Dewei School of Computer Science
Edge SLAM: Edge Points Based Monocular Visual SLAM
 Edge SLAM: Edge Points Based Monocular Visual SLAM Soumyadip Maity Arindam Saha Brojeshwar Bhowmick Embedded Systems and Robotics, TCS Research & Innovation, Kolkata, India {soumyadip.maity, ari.saha,
Edge SLAM: Edge Points Based Monocular Visual SLAM Soumyadip Maity Arindam Saha Brojeshwar Bhowmick Embedded Systems and Robotics, TCS Research & Innovation, Kolkata, India {soumyadip.maity, ari.saha,
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
CS 532: 3D Computer Vision 7 th Set of Notes
 1 CS 532: 3D Computer Vision 7 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Logistics No class on October
1 CS 532: 3D Computer Vision 7 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Logistics No class on October
arxiv: v2 [cs.cv] 26 Aug 2018
![arxiv: v2 [cs.cv] 26 Aug 2018](/thumbs/91/105044371.jpg "arxiv: v2 [cs.cv] 26 Aug 2018") A Synchronized Stereo and Plenoptic Visual Odometry Dataset Niclas Zeller 1,2, Franz Quint 2, and Uwe Stilla 1 1 Technische Universität München niclas.zeller@tum.de, stilla@tum.de 2 Karlsruhe University
A Synchronized Stereo and Plenoptic Visual Odometry Dataset Niclas Zeller 1,2, Franz Quint 2, and Uwe Stilla 1 1 Technische Universität München niclas.zeller@tum.de, stilla@tum.de 2 Karlsruhe University
RGB-D SLAM in Dynamic Environments Using Points Correlations
 RGB-D SLAM in Dynamic Environments Using Points Correlations WeiChen Dai, Yu Zhang, Ping Li, and Zheng Fang arxiv:1811.03217v1 [cs.cv] 8 Nov 2018 Abstract This paper proposed a novel RGB-D SLAM method
RGB-D SLAM in Dynamic Environments Using Points Correlations WeiChen Dai, Yu Zhang, Ping Li, and Zheng Fang arxiv:1811.03217v1 [cs.cv] 8 Nov 2018 Abstract This paper proposed a novel RGB-D SLAM method
Scanning and Printing Objects in 3D
 Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Tracking an RGB-D Camera Using Points and Planes
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Tracking an RGB-D Camera Using Points and Planes Ataer-Cansizoglu, E.; Taguchi, Y.; Ramalingam, S.; Garaas, T. TR2013-106 December 2013 Abstract
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Tracking an RGB-D Camera Using Points and Planes Ataer-Cansizoglu, E.; Taguchi, Y.; Ramalingam, S.; Garaas, T. TR2013-106 December 2013 Abstract
arxiv: v2 [cs.cv] 21 Feb 2018
![arxiv: v2 [cs.cv] 21 Feb 2018](/thumbs/80/82171285.jpg "arxiv: v2 [cs.cv] 21 Feb 2018") UnDeepVO: Monocular Visual Odometry through Unsupervised Deep Learning Ruihao Li 1, Sen Wang 2, Zhiqiang Long 3 and Dongbing Gu 1 arxiv:1709.06841v2 [cs.cv] 21 Feb 2018 Abstract We propose a novel monocular
UnDeepVO: Monocular Visual Odometry through Unsupervised Deep Learning Ruihao Li 1, Sen Wang 2, Zhiqiang Long 3 and Dongbing Gu 1 arxiv:1709.06841v2 [cs.cv] 21 Feb 2018 Abstract We propose a novel monocular
LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION
 LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION Kihwan Kim, Senior Research Scientist Zhaoyang Lv, Kihwan Kim, Alejandro Troccoli, Deqing Sun, James M. Rehg, Jan Kautz CORRESPENDECES IN COMPUTER
LEARNING RIGIDITY IN DYNAMIC SCENES FOR SCENE FLOW ESTIMATION Kihwan Kim, Senior Research Scientist Zhaoyang Lv, Kihwan Kim, Alejandro Troccoli, Deqing Sun, James M. Rehg, Jan Kautz CORRESPENDECES IN COMPUTER
A distributed framework for monocular visual SLAM
 A distributed framework for monocular visual SLAM Ruwan godagamage, Mihran Tuceryan Department of Computer and Information Science Indiana University Purdue University Indianapolis Indianapolis, Indiana
A distributed framework for monocular visual SLAM Ruwan godagamage, Mihran Tuceryan Department of Computer and Information Science Indiana University Purdue University Indianapolis Indianapolis, Indiana
3D Line Segments Extraction from Semi-dense SLAM
 3D Line Segments Extraction from Semi-dense SLAM Shida He Xuebin Qin Zichen Zhang Martin Jagersand University of Alberta Abstract Despite the development of Simultaneous Localization and Mapping (SLAM),
3D Line Segments Extraction from Semi-dense SLAM Shida He Xuebin Qin Zichen Zhang Martin Jagersand University of Alberta Abstract Despite the development of Simultaneous Localization and Mapping (SLAM),
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction
 CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction Keisuke Tateno 1,2, Federico Tombari 1, Iro Laina 1, Nassir Navab 1,3 {tateno, tombari, laina, navab}@in.tum.de 1 CAMP - TU Munich
CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction Keisuke Tateno 1,2, Federico Tombari 1, Iro Laina 1, Nassir Navab 1,3 {tateno, tombari, laina, navab}@in.tum.de 1 CAMP - TU Munich
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor
 Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Guidance: A Visual Sensing Platform For Robotic Applications
 Guidance: A Visual Sensing Platform For Robotic Applications Guyue Zhou, Lu Fang, Ketan Tang, Honghui Zhang, Kai Wang, Kang Yang {guyue.zhou, ketan.tang, honghui.zhang, kevin.wang, kang.yang}@dji.com,
Guidance: A Visual Sensing Platform For Robotic Applications Guyue Zhou, Lu Fang, Ketan Tang, Honghui Zhang, Kai Wang, Kang Yang {guyue.zhou, ketan.tang, honghui.zhang, kevin.wang, kang.yang}@dji.com,
Monocular Camera Localization in 3D LiDAR Maps
 Monocular Camera Localization in 3D LiDAR Maps Tim Caselitz Bastian Steder Michael Ruhnke Wolfram Burgard Abstract Localizing a camera in a given map is essential for vision-based navigation. In contrast
Monocular Camera Localization in 3D LiDAR Maps Tim Caselitz Bastian Steder Michael Ruhnke Wolfram Burgard Abstract Localizing a camera in a given map is essential for vision-based navigation. In contrast
Generalized Detection and Merging of Loop Closures for Video Sequences
 Generalized Detection and Merging of Loop Closures for Video Sequences Manfred Klopschitz 1, Christopher Zach 2, Arnold Irschara 1, Dieter Schmalstieg 1 1 Graz University of Technology {klopschitz,irschara,schmalstieg}@icg.tugraz.at
Generalized Detection and Merging of Loop Closures for Video Sequences Manfred Klopschitz 1, Christopher Zach 2, Arnold Irschara 1, Dieter Schmalstieg 1 1 Graz University of Technology {klopschitz,irschara,schmalstieg}@icg.tugraz.at
EasyChair Preprint. Visual Odometry Based on Convolutional Neural Networks for Large-Scale Scenes
 EasyChair Preprint 413 Visual Odometry Based on Convolutional Neural Networks for Large-Scale Scenes Xuyang Meng, Chunxiao Fan and Yue Ming EasyChair preprints are intended for rapid dissemination of research
EasyChair Preprint 413 Visual Odometry Based on Convolutional Neural Networks for Large-Scale Scenes Xuyang Meng, Chunxiao Fan and Yue Ming EasyChair preprints are intended for rapid dissemination of research
A Constant-Time Efficient Stereo SLAM System
 A Constant-Time Efficient Stereo SLAM System Christopher Mei, Gabe Sibley, Mark Cummins, Ian Reid and Paul Newman Department of Engineering Science University of Oxford, OX1 3PJ, Oxford, UK {cmei,gsibley,mjc,ian,pnewman}@robots.ox.ac.uk
A Constant-Time Efficient Stereo SLAM System Christopher Mei, Gabe Sibley, Mark Cummins, Ian Reid and Paul Newman Department of Engineering Science University of Oxford, OX1 3PJ, Oxford, UK {cmei,gsibley,mjc,ian,pnewman}@robots.ox.ac.uk
SLAM II: SLAM for robotic vision-based perception
 SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
RGB-D Camera-Based Parallel Tracking and Meshing
 RGB-D Camera-Based Parallel Tracking and Meshing Sebastian Lieberknecht Andrea Huber Slobodan Ilic Selim Benhimane metaio GmbH metaio GmbH TUM metaio GmbH Figure 1: A real-time tracking method based on
RGB-D Camera-Based Parallel Tracking and Meshing Sebastian Lieberknecht Andrea Huber Slobodan Ilic Selim Benhimane metaio GmbH metaio GmbH TUM metaio GmbH Figure 1: A real-time tracking method based on
arxiv: v1 [cs.cv] 3 Aug 2018
![arxiv: v1 [cs.cv] 3 Aug 2018](/thumbs/95/123639747.jpg "arxiv: v1 [cs.cv] 3 Aug 2018") L: Direct Sparse Odometry with Loop Closure arxiv:188.1111v1 [cs.cv] 3 Aug 18 Xiang Gao, Rui Wang, Nikolaus Demmel and Daniel Cremers Abstract In this paper we present an extension of Direct Sparse Odometry
L: Direct Sparse Odometry with Loop Closure arxiv:188.1111v1 [cs.cv] 3 Aug 18 Xiang Gao, Rui Wang, Nikolaus Demmel and Daniel Cremers Abstract In this paper we present an extension of Direct Sparse Odometry
ROBUST SCALE ESTIMATION FOR MONOCULAR VISUAL ODOMETRY USING STRUCTURE FROM MOTION AND VANISHING POINTS
 ROBUST SCALE ESTIMATION FOR MONOCULAR VISUAL ODOMETRY USING STRUCTURE FROM MOTION AND VANISHING POINTS Johannes Gräter 1, Tobias Schwarze 1, Martin Lauer 1 August 20, 2015 Abstract While monocular visual
ROBUST SCALE ESTIMATION FOR MONOCULAR VISUAL ODOMETRY USING STRUCTURE FROM MOTION AND VANISHING POINTS Johannes Gräter 1, Tobias Schwarze 1, Martin Lauer 1 August 20, 2015 Abstract While monocular visual
Robust Stereo Visual Odometry from Monocular Techniques
 Robust Stereo Visual Odometry from Monocular Techniques Mikael Persson, Tommaso Piccini, Michael Felsberg and Rudolf Mester Linköping University Post Print N.B.: When citing this work, cite the original
Robust Stereo Visual Odometry from Monocular Techniques Mikael Persson, Tommaso Piccini, Michael Felsberg and Rudolf Mester Linköping University Post Print N.B.: When citing this work, cite the original
A Framework For Evaluating Visual SLAM
 FUNKE, PIETZSCH: EVALUATING VISUAL SLAM 1 A Framework For Evaluating Visual SLAM Jan Funke Jan.Funke@inf.tu-dresden.de Tobias Pietzsch Tobias.Pietzsch@inf.tu-dresden.de Fakultät Informatik Technische Universität
FUNKE, PIETZSCH: EVALUATING VISUAL SLAM 1 A Framework For Evaluating Visual SLAM Jan Funke Jan.Funke@inf.tu-dresden.de Tobias Pietzsch Tobias.Pietzsch@inf.tu-dresden.de Fakultät Informatik Technische Universität
On the Use of Inverse Scaling in Monocular SLAM
 On the Use of Inverse Scaling in Monocular SLAM Daniele Marzorati 1, Matteo Matteucci 2, Davide Migliore 2, Domenico G. Sorrenti 1 1 Università degli Studi di Milano - Bicocca 2 Politecnico di Milano SLAM
On the Use of Inverse Scaling in Monocular SLAM Daniele Marzorati 1, Matteo Matteucci 2, Davide Migliore 2, Domenico G. Sorrenti 1 1 Università degli Studi di Milano - Bicocca 2 Politecnico di Milano SLAM
arxiv: v2 [cs.cv] 17 Nov 2018
![arxiv: v2 [cs.cv] 17 Nov 2018](/thumbs/94/119405162.jpg "arxiv: v2 [cs.cv] 17 Nov 2018") EGO-SLAM: A Robust Monocular SLAM for Egocentric Videos Suvam Patra Kartikeya Gupta Faran Ahmad Chetan Arora Subhashis Banerjee Indian Institute of Technology Delhi arxiv:1707.05564v2 [cs.cv] 17 Nov 2018
EGO-SLAM: A Robust Monocular SLAM for Egocentric Videos Suvam Patra Kartikeya Gupta Faran Ahmad Chetan Arora Subhashis Banerjee Indian Institute of Technology Delhi arxiv:1707.05564v2 [cs.cv] 17 Nov 2018
arxiv: v1 [cs.cv] 18 Nov 2016
![arxiv: v1 [cs.cv] 18 Nov 2016](/thumbs/78/76918050.jpg "arxiv: v1 [cs.cv] 18 Nov 2016") DeepVO: A Deep Learning approach for Monocular Visual Odometry arxiv:1611.06069v1 [cs.cv] 18 Nov 2016 Vikram Mohanty Shubh Agrawal Shaswat Datta Arna Ghosh Vishnu D. Sharma Debashish Chakravarty Indian
DeepVO: A Deep Learning approach for Monocular Visual Odometry arxiv:1611.06069v1 [cs.cv] 18 Nov 2016 Vikram Mohanty Shubh Agrawal Shaswat Datta Arna Ghosh Vishnu D. Sharma Debashish Chakravarty Indian
Map-Based Visual-Inertial Monocular SLAM using Inertial assisted Kalman Filter
 Map-Based Visual-Inertial Monocular SLAM using Inertial assisted Kalman Filter Meixiang Quan, Songhao Piao, Minglang Tan, Shi-Sheng Huang arxiv:1706.03648v2 [cs.ro] 15 Sep 2017 Abstract In this paper,
Map-Based Visual-Inertial Monocular SLAM using Inertial assisted Kalman Filter Meixiang Quan, Songhao Piao, Minglang Tan, Shi-Sheng Huang arxiv:1706.03648v2 [cs.ro] 15 Sep 2017 Abstract In this paper,
Parallel, Real-Time Visual SLAM
 Parallel, Real-Time Visual SLAM Brian Clipp 1, Jongwoo Lim 2, Jan-Michael Frahm 1 and Marc Pollefeys 1,3 Department of Computer Science 1 Honda Research Institute USA, Inc. 2 Department of Computer Science
Parallel, Real-Time Visual SLAM Brian Clipp 1, Jongwoo Lim 2, Jan-Michael Frahm 1 and Marc Pollefeys 1,3 Department of Computer Science 1 Honda Research Institute USA, Inc. 2 Department of Computer Science
Parallel, Real-Time Visual SLAM
 Parallel, Real-Time Visual SLAM Brian Clipp 1, Jongwoo Lim 2, Jan-Michael Frahm 1 and Marc Pollefeys 1,3 Department of Computer Science 1 Honda Research Institute USA, Inc. 2 Department of Computer Science
Parallel, Real-Time Visual SLAM Brian Clipp 1, Jongwoo Lim 2, Jan-Michael Frahm 1 and Marc Pollefeys 1,3 Department of Computer Science 1 Honda Research Institute USA, Inc. 2 Department of Computer Science
Illumination Change Robustness in Direct Visual SLAM
 Illumination Change Robustness in Direct Visual SLAM Seonwook Park spark@student.ethz.ch Thomas Scho ps Marc Pollefeys, {thomas.schoeps,marc.pollefeys}@inf.ethz.ch Abstract Direct visual odometry and Simultaneous
Illumination Change Robustness in Direct Visual SLAM Seonwook Park spark@student.ethz.ch Thomas Scho ps Marc Pollefeys, {thomas.schoeps,marc.pollefeys}@inf.ethz.ch Abstract Direct visual odometry and Simultaneous
Outdoor Obstacle Avoidance based on Hybrid Visual Stereo SLAM for an Autonomous Quadrotor MAV
 Outdoor Obstacle Avoidance based on Hybrid Visual Stereo SLAM for an Autonomous Quadrotor MAV Radouane Ait-Jellal and Andreas Zell Abstract We address the problem of on-line volumetric map creation of
Outdoor Obstacle Avoidance based on Hybrid Visual Stereo SLAM for an Autonomous Quadrotor MAV Radouane Ait-Jellal and Andreas Zell Abstract We address the problem of on-line volumetric map creation of
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Direct Stereo Visual Odometry Based on Lines
 Direct Stereo Visual Odometry Based on Lines Thomas Holzmann, Friedrich Fraundorfer and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {holzmann, fraundorfer,
Direct Stereo Visual Odometry Based on Lines Thomas Holzmann, Friedrich Fraundorfer and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {holzmann, fraundorfer,
Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation
 Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation Menandro Roxas Takeshi Oishi Institute of Industrial Science, The University of Tokyo roxas, oishi @cvl.iis.u-tokyo.ac.jp Abstract We
Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation Menandro Roxas Takeshi Oishi Institute of Industrial Science, The University of Tokyo roxas, oishi @cvl.iis.u-tokyo.ac.jp Abstract We
Reconstruction, Motion Estimation and SLAM from Events
 Reconstruction, Motion Estimation and SLAM from Events Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison June
Reconstruction, Motion Estimation and SLAM from Events Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison June
Guidance: A Visual Sensing Platform For Robotic Applications
 Guidance: A Visual Sensing Platform For Robotic Applications Guyue Zhou, Lu Fang, Ketan Tang, Honghui Zhang, Kai Wang, Kang Yang {guyue.zhou, ketan.tang, honghui.zhang, kevin.wang, kang.yang}@dji.com,
Guidance: A Visual Sensing Platform For Robotic Applications Guyue Zhou, Lu Fang, Ketan Tang, Honghui Zhang, Kai Wang, Kang Yang {guyue.zhou, ketan.tang, honghui.zhang, kevin.wang, kang.yang}@dji.com,
Computer Vision 2 Lecture 1
 Computer Vision 2 Lecture 1 Introduction (14.04.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de Organization
Computer Vision 2 Lecture 1 Introduction (14.04.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de Organization
Autonomous 3D Reconstruction Using a MAV
 Autonomous 3D Reconstruction Using a MAV Alexander Popov, Dimitrios Zermas and Nikolaos Papanikolopoulos Abstract An approach is proposed for high resolution 3D reconstruction of an object using a Micro
Autonomous 3D Reconstruction Using a MAV Alexander Popov, Dimitrios Zermas and Nikolaos Papanikolopoulos Abstract An approach is proposed for high resolution 3D reconstruction of an object using a Micro
Integrating Depth and Color Cues for Dense Multi-Resolution Scene Mapping Using RGB-D Cameras
 In Proc. of the IEEE Int. Conf. on Multisensor Fusion and Information Integration (MFI), Hamburg, Germany, 2012 Integrating Depth and Color Cues for Dense Multi-Resolution Scene Mapping Using RGB-D Cameras
In Proc. of the IEEE Int. Conf. on Multisensor Fusion and Information Integration (MFI), Hamburg, Germany, 2012 Integrating Depth and Color Cues for Dense Multi-Resolution Scene Mapping Using RGB-D Cameras
Robustness to Lighting Variations: An RGB-D Indoor Visual Odometry Using Line Segments
 Robustness to Lighting Variations: An RGB-D Indoor Visual Odometry Using Line Segments Yan Lu and Dezhen Song Abstract Large lighting variation challenges all visual odometry methods, even with RGB-D cameras.
Robustness to Lighting Variations: An RGB-D Indoor Visual Odometry Using Line Segments Yan Lu and Dezhen Song Abstract Large lighting variation challenges all visual odometry methods, even with RGB-D cameras.
WANGSIRIPITAK, MURRAY: REASONING ABOUT VISIBILITY AND OCCLUSION 1 Reducing mismatching under time-pressure by reasoning about visibility and occlusion
 Reducing mismatching under time-pressure by reasoning about visibility and occlusion S Wangsiripitak D W Murray Department of Engineering Science University of Oxford Parks Road, Oxford, OX 3PJ www.robots.ox.ac.uk/activevision
Reducing mismatching under time-pressure by reasoning about visibility and occlusion S Wangsiripitak D W Murray Department of Engineering Science University of Oxford Parks Road, Oxford, OX 3PJ www.robots.ox.ac.uk/activevision
Online Learning of Binary Feature Indexing for Real-time SLAM Relocalization
 Online Learning of Binary Feature Indexing for Real-time SLAM Relocalization Youji Feng 1, Yihong Wu 1, Lixin Fan 2 1 Institute of Automation, Chinese Academy of Sciences 2 Nokia Research Center, Tampere
Online Learning of Binary Feature Indexing for Real-time SLAM Relocalization Youji Feng 1, Yihong Wu 1, Lixin Fan 2 1 Institute of Automation, Chinese Academy of Sciences 2 Nokia Research Center, Tampere
SIMULTANEOUS localization and mapping (SLAM) and visual
 and visual") TO APPEAR IN IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Direct Sparse Odometry Jakob Engel and Vladlen Koltun and Daniel Cremers Abstract Direct Sparse Odometry (DSO) is a visual
TO APPEAR IN IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE 1 Direct Sparse Odometry Jakob Engel and Vladlen Koltun and Daniel Cremers Abstract Direct Sparse Odometry (DSO) is a visual
SIMULTANEOUS localization and mapping (SLAM) and
 and") IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 40, NO. 3, MARCH 2018 611 Direct Sparse Odometry Jakob Engel, Vladlen Koltun, and Daniel Cremers Abstract Direct Sparse Odometry (DSO)
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 40, NO. 3, MARCH 2018 611 Direct Sparse Odometry Jakob Engel, Vladlen Koltun, and Daniel Cremers Abstract Direct Sparse Odometry (DSO)
Computing Egomotion with Local Loop Closures for Egocentric Videos
 12000 frames 2600 frames Computing Egomotion with Local Loop Closures for Egocentric Videos Suvam Patra IIT Delhi Himani Arora Columbia University Himanshu Aggarwal Qualcomm, Hyderabad Chetan Arora IIIT
12000 frames 2600 frames Computing Egomotion with Local Loop Closures for Egocentric Videos Suvam Patra IIT Delhi Himani Arora Columbia University Himanshu Aggarwal Qualcomm, Hyderabad Chetan Arora IIIT
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Efficient Multi-Camera Visual-Inertial SLAM for Micro Aerial Vehicles
 Efficient Multi-Camera Visual-Inertial SLAM for Micro Aerial Vehicles Sebastian Houben, Jan Quenzel, Nicola Krombach, and Sven Behnke Abstract Visual SLAM is an area of vivid research and bears countless
Efficient Multi-Camera Visual-Inertial SLAM for Micro Aerial Vehicles Sebastian Houben, Jan Quenzel, Nicola Krombach, and Sven Behnke Abstract Visual SLAM is an area of vivid research and bears countless
Structure-From-Motion and RGBD Depth Fusion
 1 Structure-From-Motion and RGBD Depth Fusion Akash Chandrashekar, John Papadakis, Andrew Willis Jamie Gantert Department of Electrical and Computer Engineering Munitions Directorate University of North
1 Structure-From-Motion and RGBD Depth Fusion Akash Chandrashekar, John Papadakis, Andrew Willis Jamie Gantert Department of Electrical and Computer Engineering Munitions Directorate University of North
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Efficient Compositional Approaches for Real-Time Robust Direct Visual Odometry from RGB-D Data
 Efficient Compositional Approaches for Real-Time Robust Direct Visual Odometry from RGB-D Data Sebastian Klose 1, Philipp Heise 1 and Alois Knoll 1 Abstract In this paper we give an evaluation of different
Efficient Compositional Approaches for Real-Time Robust Direct Visual Odometry from RGB-D Data Sebastian Klose 1, Philipp Heise 1 and Alois Knoll 1 Abstract In this paper we give an evaluation of different
Monocular Visual Odometry
 Elective in Robotics coordinator: Prof. Giuseppe Oriolo Monocular Visual Odometry (slides prepared by Luca Ricci) Monocular vs. Stereo: eamples from Nature Predator Predators eyes face forward. The field
Elective in Robotics coordinator: Prof. Giuseppe Oriolo Monocular Visual Odometry (slides prepared by Luca Ricci) Monocular vs. Stereo: eamples from Nature Predator Predators eyes face forward. The field
arxiv: v1 [cs.cv] 25 Sep 2017
![arxiv: v1 [cs.cv] 25 Sep 2017](/thumbs/75/72534904.jpg "arxiv: v1 [cs.cv] 25 Sep 2017") : Towards End-to-End Visual Odometry with Deep Recurrent Convolutional Neural Networks I. I NTRODUCTION Visual odometry (VO), as one of the most essential techniques for pose estimation and robot localisation,
: Towards End-to-End Visual Odometry with Deep Recurrent Convolutional Neural Networks I. I NTRODUCTION Visual odometry (VO), as one of the most essential techniques for pose estimation and robot localisation,
FAKULTÄT FÜR INFORMATIK. Semi-dense visual SLAM on mobile devices
 FAKULTÄT FÜR INFORMATIK DER TECHNISCHEN UNIVERSITÄT MÜNCHEN Master s Thesis in Informatik Semi-dense visual SLAM on mobile devices Thomas Schöps FAKULTÄT FÜR INFORMATIK DER TECHNISCHEN UNIVERSITÄT MÜNCHEN
FAKULTÄT FÜR INFORMATIK DER TECHNISCHEN UNIVERSITÄT MÜNCHEN Master s Thesis in Informatik Semi-dense visual SLAM on mobile devices Thomas Schöps FAKULTÄT FÜR INFORMATIK DER TECHNISCHEN UNIVERSITÄT MÜNCHEN
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures
 Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation