Exploiting Indoor Mobile Laser Scanner Trajectories for Interpretation of Indoor Scenes
|
|
|
- Alexander Nicholson
- 6 years ago
- Views:
Transcription
1 Exploiting Indoor Mobile Laser Scanner Trajectories for Interpretation of Indoor Scenes March 2018 Promoter: Prof. Dr. Ir. George Vosselman Supervisor: Michael Peter 1




, EOS")
, GIS")



2 Indoor 3D Model Reconstruction to Support Disaster Management in Large Buildings Smart Indoor Models in 3D (SIMs3D) SIMs3D Project partners 1. STW as a technology foundation 2. Academic partners: University of Twente (UT), EOS Department Delft University of Technology (TUD), GIS Technology 3. Companies: Cyclomedia Technology B.V. Leap3D CGI Nederland B.V. as a software advisor 4. End Users: inowitbrandweer Nederland as an end user and advisor for user cases Open Geospatial Consortium (OGC) as the user of the final IndoorGML 2
 Data: Mobile Laser Scanner (MLS) point cloud Terrestrial Laser Scanner (TLS) Images Microsoft Kinect Point clouds 3D model Ikehata et al.")
3 Indoor 3D Model Reconstruction to Support Disaster Management in Large Buildings Smart Indoor Models in 3D (SIMs3D) SIMs3D Project Goals 1. Indoor 3D reconstruction from point clouds (UT) 2. Emergency responses in public buildings (TUD) Data: Mobile Laser Scanner (MLS) point cloud Terrestrial Laser Scanner (TLS) Images Microsoft Kinect Point clouds 3D model Ikehata et al ZebRevo Our backpack system NavVis M3 Trolley 3

4 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Problem and Motivation: Permanent structure reconstruction, wall detection Room segmentation Opening detection from cluttered data: door, window Reflection from the glass surfaces Zeb1 trajectory 4

5 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Problem and Motivation: Permanent structure reconstruction, wall detection Room segmentation Opening detection from cluttered data: door, window Reflection from the glass surfaces Zeb1 Zeb1 point cloud source: A. Elseicy thesis 5

6 Removing reflected points because of glass surfaces: trajectory reflection glass surface wall surface Top view of a room containing reflected surfaces. Points are colored by height. 6



7 Removing reflected points because of glass surfaces: Top view of a room with reflected surfaces, yellow area. Top view of the same area, colored by time. Top view. Reflected segments are green. 7


8 Wall detection: Generate wall patches Intersect segments Generate an adjacency graph Label graph edges as: wall-wall, wall-ceiling, wall-floor Label graph nodes based on number of edges labels Side view of the graph 8


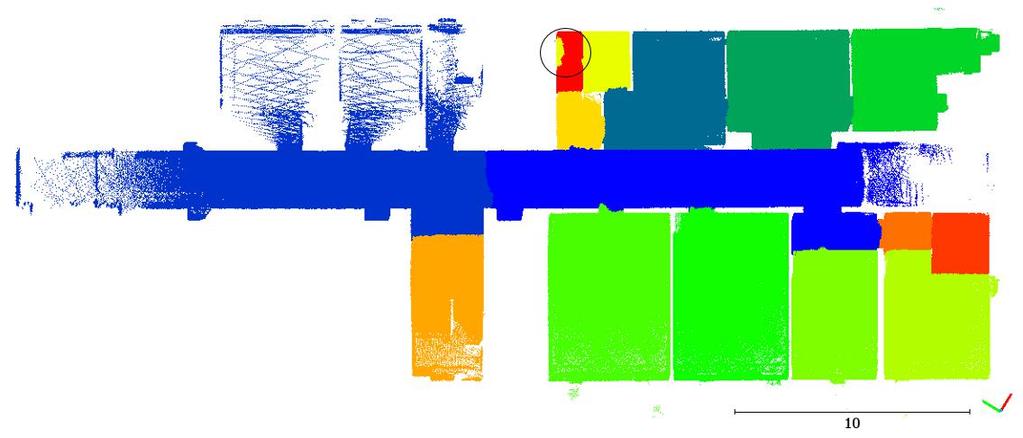
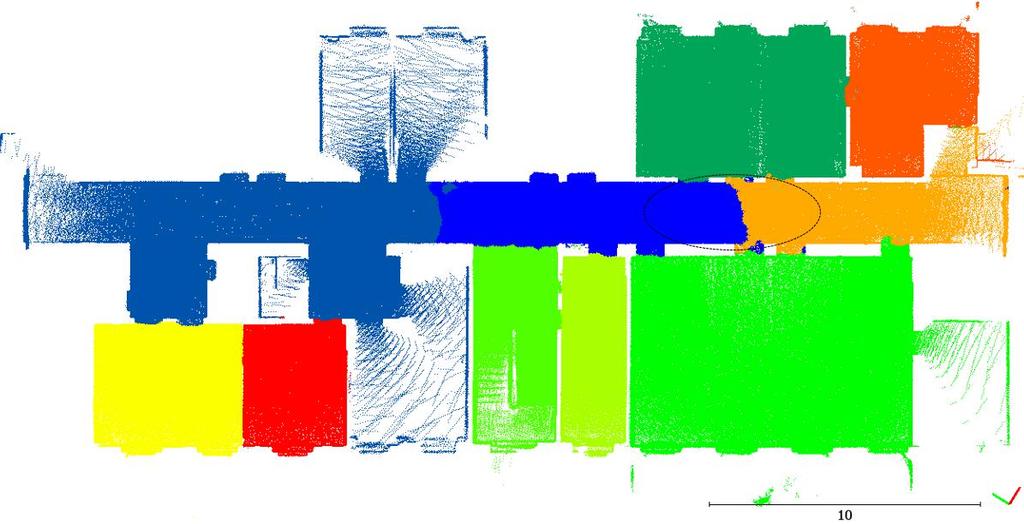
9 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Wall detection result: Zeb1 data from Fire brigade building (top view) 9

 Detected walls from 2nd iteration (top")
10 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Wall detection result: Detected walls from 1st iteration (top view) Detected walls from 2nd iteration (top view) 10



")
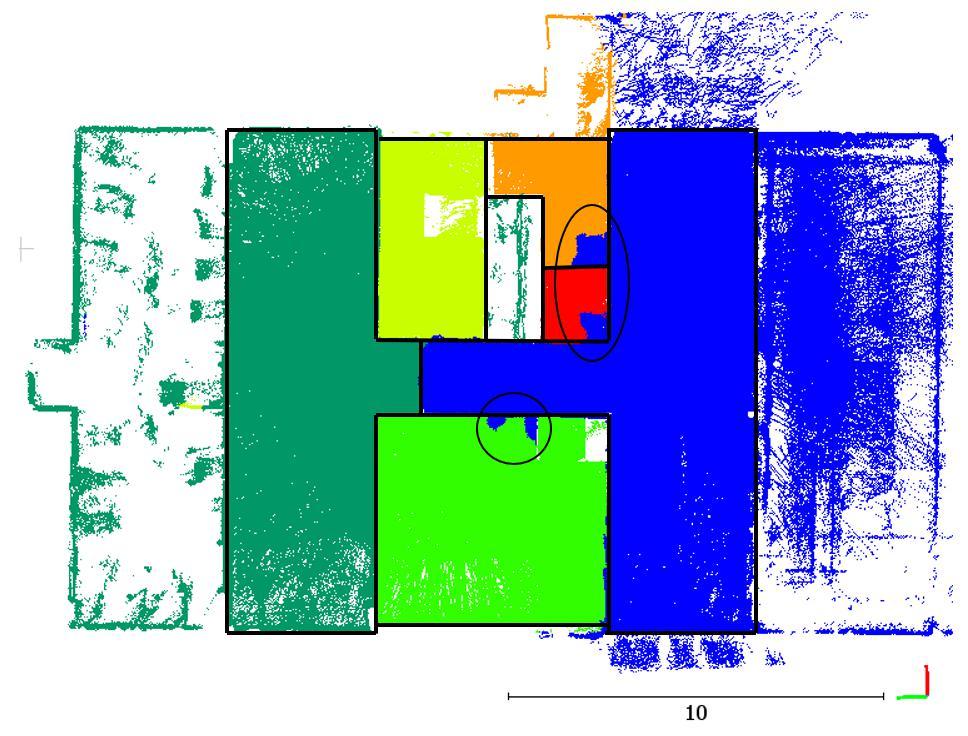
11 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Wall detection result: Matterport system Matterport data from Stanford Compared with ground truth (top view) noise: 1 cm, 2 mil points 11


12 Wall detection result: Our Backpack System Data 12
13 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Opening detection: Opening detection using occlusion test Point clouds from Zeb1 MLS trajectory as sensor position Wall Plane (right side view) Intersected voxel Trajectory Occlusion occupied opening occluded Points behind the surface Zeb1 data from Fire brigade building (top view) 13
14 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Opening detection : Opening detection using occlusion test Surface point cloud Openings False openings 14

15 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Opening detection : modified laser points Original laser points Modified laser points by removing points behind the surfaces 15

 Result of door detection using")
16 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Door detection (closed and open doors) Result of door detection using trajectory 16




17 Space partitioning and navigable space using voxels Space partitions Space partitions, walls and doors Space partitions and ground truth walls Space partitions and navigable space 17



")
18 All results together Point clouds Openings (cyan color) Wall Boxes Space Partitions 18


19 Backpack system data Space Partitions and trajectory Navigable space and walls Diemen Building in Braunschweig 19


20 Room Segmentation source: A. Elseicy s Msc Thesis 20


21 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data More details: In The ISPRS GeoSpatial Week 2017, Wuhan, China 21


22 Thank you for your attention Questions? Linkedin 22
23 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Parameters: Algorithm Parame te rs Value SurfaceGrowing Se gme ntation Re fle ction Re moval Surface Patch Generation Wall/Floor/Ceiling Detection distance to surface seed search radius time difference # of reflected points in a segment planes distance segments distance planes angle intersection threshold surface angle threshold floor height estimation (optional) ceiling height estimation (optional) dist to floor, ceiling (optional) PruneWall Detection dist to floor, ceiling Occlusion Test (Opening detection) Space Partitioning Door Detection voxel size closenees dist to surface voxel size search windows size voxel size door size (width, height) search windows size percentage of void_hood points trajectory search radius 0.10 m 1.0 m 150 s 70% 0.60 m 0.40 m 10 degree 0.10 m 20 degree m 0.50 m 0.10 m 0.60 m 0.10 m 5*voxel_size *21*voxel_size 5*voxel_size 70% 0.15 m Class Precision Recall F1-Score Wall Floor Ceiling Accuracy of results for wall, Floor and ceiling Class Precision Openings 0.73 Occluded 0.57 Occupied 0.89 Accuracy of results for openings 23
24 Exploiting MLS Trajectory for Interpretation of Indoor laser Scanner Data Analyzing the methods: Wall Detection: relies on the segment generalization and connectivity of segments. Opening Detection: relies on the wall detection results, challenge in occluded openings and reflection from glass. Door Detection: relies on the trajectory and input door size parameter. Space Partitioning: windows and gaps in the data are problematic for space partitioning. Advantages of our method: + Applicable on non-manhattan World + Applicable on non-vertical walls + Scalable to large datasets + Improvable with iterations Disadvantages of our method: - Big gaps in the data challenge adjacency graph - Heavy clutter near the ceiling is problematic - Each methods relies on previous results 24
Permanent Structure Detection in Cluttered Point Clouds from Indoor Mobile Laser Scanners (IMLS)
") Permanent Structure Detection in Cluttered Point Clouds from NCG Symposium October 2016 Promoter: Prof. Dr. Ir. George Vosselman Supervisor: Michael Peter Problem and Motivation: Permanent structure reconstruction,
Permanent Structure Detection in Cluttered Point Clouds from NCG Symposium October 2016 Promoter: Prof. Dr. Ir. George Vosselman Supervisor: Michael Peter Problem and Motivation: Permanent structure reconstruction,
INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D)
") INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D) PhD Research Proposal 2015-2016 Promoter: Prof. Dr. Ir. George
INDOOR 3D MODEL RECONSTRUCTION TO SUPPORT DISASTER MANAGEMENT IN LARGE BUILDINGS Project Abbreviated Title: SIMs3D (Smart Indoor Models in 3D) PhD Research Proposal 2015-2016 Promoter: Prof. Dr. Ir. George
Semantic Interpretation of Mobile Laser Scanner Point Clouds in Indoor Scenes Using Trajectories
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 Article Semantic Interpretation of Mobile Laser Scanner Point Clouds in Indoor Scenes Using
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 Article Semantic Interpretation of Mobile Laser Scanner Point Clouds in Indoor Scenes Using
SPACE IDENTIFICATION AND SPACE SUBDIVISION: A POWERFUL CONCEPT FOR INDOOR NAVIGATION AND NAVIGATION
 SPACE IDENTIFICATION AND SPACE SUBDIVISION: A POWERFUL CONCEPT FOR INDOOR NAVIGATION AND NAVIGATION Prof. Sisi Zlatanova UNSW Built Environment s.zlatanova@unsw.edu.au 1 CONTENT Spaces Sims3D BIM as input
SPACE IDENTIFICATION AND SPACE SUBDIVISION: A POWERFUL CONCEPT FOR INDOOR NAVIGATION AND NAVIGATION Prof. Sisi Zlatanova UNSW Built Environment s.zlatanova@unsw.edu.au 1 CONTENT Spaces Sims3D BIM as input
AN EVALUATION PIPELINE FOR INDOOR LASER SCANNING POINT CLOUDS
 AN EVALUATION PIPELINE FOR INDOOR LASER SCANNING POINT CLOUDS S. Karam 1, *, M. Peter 1, S. Hosseinyalamdary 1, G. Vosselman 1 1 Dept. of Earth Observation Science, Faculty ITC, University of Twente, 7514
AN EVALUATION PIPELINE FOR INDOOR LASER SCANNING POINT CLOUDS S. Karam 1, *, M. Peter 1, S. Hosseinyalamdary 1, G. Vosselman 1 1 Dept. of Earth Observation Science, Faculty ITC, University of Twente, 7514
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Advanced point cloud processing
 Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
AUTOMATIC EXTRACTION OF BUILDING FEATURES FROM TERRESTRIAL LASER SCANNING
 AUTOMATIC EXTRACTION OF BUILDING FEATURES FROM TERRESTRIAL LASER SCANNING Shi Pu and George Vosselman International Institute for Geo-information Science and Earth Observation (ITC) spu@itc.nl, vosselman@itc.nl
AUTOMATIC EXTRACTION OF BUILDING FEATURES FROM TERRESTRIAL LASER SCANNING Shi Pu and George Vosselman International Institute for Geo-information Science and Earth Observation (ITC) spu@itc.nl, vosselman@itc.nl
Methods for Automatically Modeling and Representing As-built Building Information Models
 NSF GRANT # CMMI-0856558 NSF PROGRAM NAME: Automating the Creation of As-built Building Information Models Methods for Automatically Modeling and Representing As-built Building Information Models Daniel
NSF GRANT # CMMI-0856558 NSF PROGRAM NAME: Automating the Creation of As-built Building Information Models Methods for Automatically Modeling and Representing As-built Building Information Models Daniel
AUTOMATIC GENERATION OF INDOOR NAVIGABLE SPACE USING A POINT CLOUD AND ITS SCANNER TRAJECTORY
 AUTOMATIC GENERATION OF INDOOR NAVIGABLE SPACE USING A POINT CLOUD AND ITS SCANNER TRAJECTORY B. R. Staats a, A. A. Diakité b, R. L. Voûte c,d, S. Zlatanova b, a Master of Science Geomatics, Faculty of
AUTOMATIC GENERATION OF INDOOR NAVIGABLE SPACE USING A POINT CLOUD AND ITS SCANNER TRAJECTORY B. R. Staats a, A. A. Diakité b, R. L. Voûte c,d, S. Zlatanova b, a Master of Science Geomatics, Faculty of
Recent developments in laser scanning
 Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
Recent developments in laser scanning Kourosh Khoshelham With contributions from: Sander Oude Elberink, Guorui Li, Xinwei Fang, Sudan Xu and Lucia Diaz Vilarino Why laser scanning? Laser scanning accurate
CS 4758: Automated Semantic Mapping of Environment
 CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
OVERVIEW OF BUILDING RESEARCH AT THE APPLIED GEOTECHNOLOGIES
 PhD and Postdoc research OVERVIEW OF BUILDING RESEARCH AT THE APPLIED GEOTECHNOLOGIES Lucía Díaz Vilariño Delft, December 2016 Index The Applied Geotechnologies Research Group PhD research: from point
PhD and Postdoc research OVERVIEW OF BUILDING RESEARCH AT THE APPLIED GEOTECHNOLOGIES Lucía Díaz Vilariño Delft, December 2016 Index The Applied Geotechnologies Research Group PhD research: from point
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Watertight Planar Surface Reconstruction of Voxel Data
 Watertight Planar Surface Reconstruction of Voxel Data Eric Turner CS 284 Final Project Report December 13, 2012 1. Introduction There are many scenarios where a 3D shape is represented by a voxel occupancy
Watertight Planar Surface Reconstruction of Voxel Data Eric Turner CS 284 Final Project Report December 13, 2012 1. Introduction There are many scenarios where a 3D shape is represented by a voxel occupancy
2/19/2018. Who are we? Who am I? What is Scanning? How does scanning work? How does scanning work? Scanning for Today s Surveyors
 2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
2/19/2018 Who are we? Scanning for Today s Surveyors Survey, GIS, and Construction dealer Founded in 1988 Employee Owned Headquartered in Bismarck, ND States covered: ND, SD, MN, MT, WY, CO, UT, ID, WA,
3D modeling of interior spaces: Learning the language of indoor architecture. Kourosh Khoshelham Lucia Díaz-Vilariño
 3D modeling of interior spaces: Learning the language of indoor architecture Kourosh Khoshelham Lucia Díaz-Vilariño NEED FOR 3D INDOOR MODELS Crisis management in large public buildings Automated route
3D modeling of interior spaces: Learning the language of indoor architecture Kourosh Khoshelham Lucia Díaz-Vilariño NEED FOR 3D INDOOR MODELS Crisis management in large public buildings Automated route
Semantic Enrichment of a Point Cloud based on an Octree for Multi-Storey Pathfinding
 Master of Science Geomatics Semantic Enrichment of a Point Cloud based on an Octree for Multi-Storey Pathfinding Florian W. Fichtner June 2016 S E M A N T I C E N R I C H M E N T O F A P O I N T C L O
Master of Science Geomatics Semantic Enrichment of a Point Cloud based on an Octree for Multi-Storey Pathfinding Florian W. Fichtner June 2016 S E M A N T I C E N R I C H M E N T O F A P O I N T C L O
A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS
 A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS A. Mahphood, H. Arefi *, School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran,
A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS A. Mahphood, H. Arefi *, School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran,
SEMANTIC ENRICHMENT OF INDOOR MOBILE LASER SCANNER POINT CLOUDS AND TRAJECTORIES
 SEMANTIC ENRICHMENT OF INDOOR MOBILE LASER SCANNER POINT CLOUDS AND TRAJECTORIES AHMED MOSSAD IBRAHIM ELSEICY February, 2018 SUPERVISORS: Dr. ing. M.S. Peter Dr. ir. S.J. Oude Elberink S. Nikoohemat MSc
SEMANTIC ENRICHMENT OF INDOOR MOBILE LASER SCANNER POINT CLOUDS AND TRAJECTORIES AHMED MOSSAD IBRAHIM ELSEICY February, 2018 SUPERVISORS: Dr. ing. M.S. Peter Dr. ir. S.J. Oude Elberink S. Nikoohemat MSc
AN EVALUATION FRAMEWORK FOR BENCHMARKING INDOOR MODELLING METHODS
 AN EVALUATION FRAMEWORK FOR BENCHMARKING INDOOR MODELLING METHODS K. Khoshelham 1, H. Tran 1, L. Díaz-Vilariño 2, M. Peter 3, Z. Kang 4, D. Acharya 1 1 Dept. of Infrastructure Engineering, University of
AN EVALUATION FRAMEWORK FOR BENCHMARKING INDOOR MODELLING METHODS K. Khoshelham 1, H. Tran 1, L. Díaz-Vilariño 2, M. Peter 3, Z. Kang 4, D. Acharya 1 1 Dept. of Infrastructure Engineering, University of
DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM
 DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM George Vosselman University of Twente, Faculty ITC, Enschede, the Netherlands george.vosselman@utwente.nl KEY WORDS: localisation,
DESIGN OF AN INDOOR MAPPING SYSTEM USING THREE 2D LASER SCANNERS AND 6 DOF SLAM George Vosselman University of Twente, Faculty ITC, Enschede, the Netherlands george.vosselman@utwente.nl KEY WORDS: localisation,
DETECTION, MODELING AND CLASSIFICATION OF MOLDINGS FOR AUTOMATED REVERSE ENGINEERING OF BUILDINGS FROM 3D DATA
 DETECTION, MODELING AND CLASSIFICATION OF MOLDINGS FOR AUTOMATED REVERSE ENGINEERING OF BUILDINGS FROM 3D DATA ) Enrique Valero 1 *, Antonio Adan 2, Daniel Huber 3 and Carlos Cerrada 1 1 Escuela Técnica
DETECTION, MODELING AND CLASSIFICATION OF MOLDINGS FOR AUTOMATED REVERSE ENGINEERING OF BUILDINGS FROM 3D DATA ) Enrique Valero 1 *, Antonio Adan 2, Daniel Huber 3 and Carlos Cerrada 1 1 Escuela Técnica
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Three-Dimensional Laser Scanner. Field Evaluation Specifications
 Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Stanford University June 27, 2004 Stanford Linear Accelerator Center P.O. Box 20450 Stanford, California 94309, USA Three-Dimensional Laser Scanner Field Evaluation Specifications Metrology Department
Extracting topological relations between indoor spaces from point clouds
 Delft University of Technology Extracting topological relations between indoor spaces from point clouds Tran, H.; Khoshelham, K.; Kealy, A.; Díaz-Vilariño, Lucía DOI 10.5194/isprs-annals-IV-2-W4-401-2017
Delft University of Technology Extracting topological relations between indoor spaces from point clouds Tran, H.; Khoshelham, K.; Kealy, A.; Díaz-Vilariño, Lucía DOI 10.5194/isprs-annals-IV-2-W4-401-2017
Location Based Technology Expert. Mobile VR 3D modeling for BIM
 Location Based Technology Expert Mobile VR 3D modeling for BIM 50bln square meters indoor environment are waiting to be digitized and go online. So we need a way efficient enough to map the indoors VR
Location Based Technology Expert Mobile VR 3D modeling for BIM 50bln square meters indoor environment are waiting to be digitized and go online. So we need a way efficient enough to map the indoors VR
Semantic As-built 3D Modeling of Buildings under Construction from Laser-scan Data Based on Local Convexity without an As-planned Model
 Semantic As-built 3D Modeling of Buildings under Construction from Laser-scan Data Based on Local Convexity without an As-planned Model H. Son a, J. Na a, and C. Kim a * a Department of Architectural Engineering,
Semantic As-built 3D Modeling of Buildings under Construction from Laser-scan Data Based on Local Convexity without an As-planned Model H. Son a, J. Na a, and C. Kim a * a Department of Architectural Engineering,
REPRESENTATION REQUIREMENTS OF AS-IS BUILDING INFORMATION MODELS GENERATED FROM LASER SCANNED POINT CLOUD DATA
 REPRESENTATION REQUIREMENTS OF AS-IS BUILDING INFORMATION MODELS GENERATED FROM LASER SCANNED POINT CLOUD DATA Engin Burak Anil 1 *, Burcu Akinci 1, and Daniel Huber 2 1 Department of Civil and Environmental
REPRESENTATION REQUIREMENTS OF AS-IS BUILDING INFORMATION MODELS GENERATED FROM LASER SCANNED POINT CLOUD DATA Engin Burak Anil 1 *, Burcu Akinci 1, and Daniel Huber 2 1 Department of Civil and Environmental
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data
 ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
ELMF 2013, 11-13 November 2013 Amsterdam, The Netherlands High Resolution Tree Models: Modeling of a Forest Stand Based on Terrestrial Laser Scanning and Triangulating Scanner Data Lothar Eysn Lothar.Eysn@geo.tuwien.ac.at
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Extraction of façades with window information from oblique view airborne laser scanning point clouds
 Extraction of façades with window information from oblique view airborne laser scanning point clouds Sebastian Tuttas, Uwe Stilla Photogrammetry and Remote Sensing, Technische Universität München, 80290
Extraction of façades with window information from oblique view airborne laser scanning point clouds Sebastian Tuttas, Uwe Stilla Photogrammetry and Remote Sensing, Technische Universität München, 80290
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Improving Door Detection for Mobile Robots by fusing Camera and Laser-Based Sensor Data
 Improving Door Detection for Mobile Robots by fusing Camera and Laser-Based Sensor Data Jens Hensler, Michael Blaich, and Oliver Bittel University of Applied Sciences Brauneggerstr. 55, 78462 Konstanz,
Improving Door Detection for Mobile Robots by fusing Camera and Laser-Based Sensor Data Jens Hensler, Michael Blaich, and Oliver Bittel University of Applied Sciences Brauneggerstr. 55, 78462 Konstanz,
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE
 THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE Overview Summary of the results Statistics Data release What s next? ISPRS / EuroSDR
THE ISPRS/EUROSDR BENCHMARK ON MULTI-PLATFORM PHOTOGRAMMETRY: RESULTS AND LESSON LEARNT FRANCESCO NEX AND MARKUS GERKE Overview Summary of the results Statistics Data release What s next? ISPRS / EuroSDR
Object Classification in Domestic Environments
 Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
Object Classification in Domestic Environments Markus Vincze Aitor Aldoma, Markus Bader, Peter Einramhof, David Fischinger, Andreas Huber, Lara Lammer, Thomas Mörwald, Sven Olufs, Ekaterina Potapova, Johann
GENERATING BUILDING OUTLINES FROM TERRESTRIAL LASER SCANNING
 GENERATING BUILDING OUTLINES FROM TERRESTRIAL LASER SCANNING Shi Pu International Institute for Geo-information Science and Earth Observation (ITC), Hengelosestraat 99, P.O. Box 6, 7500 AA Enschede, The
GENERATING BUILDING OUTLINES FROM TERRESTRIAL LASER SCANNING Shi Pu International Institute for Geo-information Science and Earth Observation (ITC), Hengelosestraat 99, P.O. Box 6, 7500 AA Enschede, The
Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles
 Eingebettete Systeme Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles 25/6/2018, Vikas Agrawal, Marcel
Eingebettete Systeme Evaluating optical flow vectors through collision points of object trajectories in varying computergenerated snow intensities for autonomous vehicles 25/6/2018, Vikas Agrawal, Marcel
Universiteit Leiden Computer Science
 Universiteit Leiden Computer Science Optimizing octree updates for visibility determination on dynamic scenes Name: Hans Wortel Student-no: 0607940 Date: 28/07/2011 1st supervisor: Dr. Michael Lew 2nd
Universiteit Leiden Computer Science Optimizing octree updates for visibility determination on dynamic scenes Name: Hans Wortel Student-no: 0607940 Date: 28/07/2011 1st supervisor: Dr. Michael Lew 2nd
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
User-Guided Dimensional Analysis of Indoor Scenes Using Depth Sensors
 User-Guided Dimensional Analysis of Indoor Scenes Using Depth Sensors Yong Xiao a, Chen Feng a, Yuichi Taguchi b, and Vineet R. Kamat a a Department of Civil and Environmental Engineering, University of
User-Guided Dimensional Analysis of Indoor Scenes Using Depth Sensors Yong Xiao a, Chen Feng a, Yuichi Taguchi b, and Vineet R. Kamat a a Department of Civil and Environmental Engineering, University of
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Delft University of Technology. Indoor modelling from SLAM-based laser scanner Door detection to envelope reconstruction
 Delft University of Technology Indoor modelling from SLAM-based laser scanner Door detection to envelope reconstruction Díaz-Vilariño, Lucía; Verbree, Edward; Zlatanova, Sisi; Diakite, Abdoulaye DOI 10.5194/isprs-archives-XLII-2-W7-345-2017
Delft University of Technology Indoor modelling from SLAM-based laser scanner Door detection to envelope reconstruction Díaz-Vilariño, Lucía; Verbree, Edward; Zlatanova, Sisi; Diakite, Abdoulaye DOI 10.5194/isprs-archives-XLII-2-W7-345-2017
Segmentation of point clouds
 Segmentation of point clouds George Vosselman INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Extraction of information from point clouds 1 Segmentation algorithms Extraction
Segmentation of point clouds George Vosselman INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Extraction of information from point clouds 1 Segmentation algorithms Extraction
Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors
 33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
33 rd International Symposium on Automation and Robotics in Construction (ISARC 2016) Construction Progress Management and Interior Work Analysis Using Kinect 3D Image Sensors Kosei Ishida 1 1 School of
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Automatic image network design leading to optimal image-based 3D models
 Automatic image network design leading to optimal image-based 3D models Enabling laymen to capture high quality 3D models of Cultural Heritage Bashar Alsadik & Markus Gerke, ITC, University of Twente,
Automatic image network design leading to optimal image-based 3D models Enabling laymen to capture high quality 3D models of Cultural Heritage Bashar Alsadik & Markus Gerke, ITC, University of Twente,
Occlusion Patterns for Object Class Detection
 Occlusion Patterns for Object Class Detection Bojan Pepik1 Michael Stark1,2 Peter Gehler3 Bernt Schiele1 Max Planck Institute for Informatics, 2Stanford University, 3Max Planck Institute for Intelligent
Occlusion Patterns for Object Class Detection Bojan Pepik1 Michael Stark1,2 Peter Gehler3 Bernt Schiele1 Max Planck Institute for Informatics, 2Stanford University, 3Max Planck Institute for Intelligent
Piecewise-Planar 3D Reconstruction with Edge and Corner Regularization
 Piecewise-Planar 3D Reconstruction with Edge and Corner Regularization Alexandre Boulch Martin de La Gorce Renaud Marlet IMAGINE group, Université Paris-Est, LIGM, École Nationale des Ponts et Chaussées
Piecewise-Planar 3D Reconstruction with Edge and Corner Regularization Alexandre Boulch Martin de La Gorce Renaud Marlet IMAGINE group, Université Paris-Est, LIGM, École Nationale des Ponts et Chaussées
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Cadastre - Preliminary Results
 Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
AUTOMATIC PROCESSING OF MOBILE LASER SCANNER POINT CLOUDS FOR BUILDING FAÇADE DETECTION
 AUTOMATIC PROCESSING OF MOBILE LASER SCANNER POINT CLOUDS FOR BUILDING FAÇADE DETECTION Nalani Hetti Arachchige*, Sanka Nirodha Perera, Hans-Gerd Maas Institute of Photogrammetry and Remote Sensing, Technische
AUTOMATIC PROCESSING OF MOBILE LASER SCANNER POINT CLOUDS FOR BUILDING FAÇADE DETECTION Nalani Hetti Arachchige*, Sanka Nirodha Perera, Hans-Gerd Maas Institute of Photogrammetry and Remote Sensing, Technische
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Smart 3D indoor models to support crisis management in large public buildings
 Cooperation Programme Maps4Society Project proposal Smart 3D indoor models to support crisis management in large public buildings 1. KEY INFORMATION 1.1 FURTHER DETAILS MAIN APPLICANT Name : Dr. Dipl.-Ing.
Cooperation Programme Maps4Society Project proposal Smart 3D indoor models to support crisis management in large public buildings 1. KEY INFORMATION 1.1 FURTHER DETAILS MAIN APPLICANT Name : Dr. Dipl.-Ing.
Support surfaces prediction for indoor scene understanding
 2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
2013 IEEE International Conference on Computer Vision Support surfaces prediction for indoor scene understanding Anonymous ICCV submission Paper ID 1506 Abstract In this paper, we present an approach to
Loop detection and extended target tracking using laser data
 Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds
 1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
FAST EDGE DETECTION AND SEGMENTATION OF TERRESTRIAL LASER SCANS THROUGH NORMAL VARIATION ANALYSIS
 FAST EDGE DETECTION AND SEGMENTATION OF TERRESTRIAL LASER SCANS THROUGH NORMAL VARIATION ANALYSIS Erzhuo Che a, *, Michael J. Olsen a a Oregon State University, Corvallis, Oregon, 97331, United States
FAST EDGE DETECTION AND SEGMENTATION OF TERRESTRIAL LASER SCANS THROUGH NORMAL VARIATION ANALYSIS Erzhuo Che a, *, Michael J. Olsen a a Oregon State University, Corvallis, Oregon, 97331, United States
SEMANTIC FEATURE BASED REGISTRATION OF TERRESTRIAL POINT CLOUDS
 SEMANTIC FEATURE BASED REGISTRATION OF TERRESTRIAL POINT CLOUDS A. Thapa*, S. Pu, M. Gerke International Institute for Geo-Information Science and Earth Observation (ITC), Hengelosestraat 99, P.O.Box 6,
SEMANTIC FEATURE BASED REGISTRATION OF TERRESTRIAL POINT CLOUDS A. Thapa*, S. Pu, M. Gerke International Institute for Geo-Information Science and Earth Observation (ITC), Hengelosestraat 99, P.O.Box 6,
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
Real-time Door Detection based on AdaBoost learning algorithm
 Real-time Door Detection based on AdaBoost learning algorithm Jens Hensler, Michael Blaich, and Oliver Bittel University of Applied Sciences Konstanz, Germany Laboratory for Mobile Robots Brauneggerstr.
Real-time Door Detection based on AdaBoost learning algorithm Jens Hensler, Michael Blaich, and Oliver Bittel University of Applied Sciences Konstanz, Germany Laboratory for Mobile Robots Brauneggerstr.
3D Semantic Parsing of Large-Scale Indoor Spaces Supplementary Material
 3D Semantic Parsing of Large-Scale Indoor Spaces Supplementar Material Iro Armeni 1 Ozan Sener 1,2 Amir R. Zamir 1 Helen Jiang 1 Ioannis Brilakis 3 Martin Fischer 1 Silvio Savarese 1 1 Stanford Universit
3D Semantic Parsing of Large-Scale Indoor Spaces Supplementar Material Iro Armeni 1 Ozan Sener 1,2 Amir R. Zamir 1 Helen Jiang 1 Ioannis Brilakis 3 Martin Fischer 1 Silvio Savarese 1 1 Stanford Universit
Manhattan-World Assumption for As-built Modeling Industrial Plant
 Manhattan-World Assumption for As-built Modeling Industrial Plant Tomohiro Mizoguchi 1, Tomokazu Kuma 2, Yoshikazu Kobayashi 3 and Kenji Shirai 4 Department of Computer Science, College of Engineering,
Manhattan-World Assumption for As-built Modeling Industrial Plant Tomohiro Mizoguchi 1, Tomokazu Kuma 2, Yoshikazu Kobayashi 3 and Kenji Shirai 4 Department of Computer Science, College of Engineering,
Automatic Room Segmentation from Unstructured 3D Data of Indoor Environments
 Automatic Room Segmentation from Unstructured 3D Data of Indoor Environments Rareş Ambruş 1, Sebastian Claici 2, Axel Wendt 3 Abstract We present an automatic approach for the task of reconstructing a
Automatic Room Segmentation from Unstructured 3D Data of Indoor Environments Rareş Ambruş 1, Sebastian Claici 2, Axel Wendt 3 Abstract We present an automatic approach for the task of reconstructing a
ReFlx. ReFlx 100 Collision Avoidance System Instruction Manual Page 1 6/30/99
 100 COLLISION AVOIDANCE SYSTEM The 100 collision avoidance system is intended for use with bridges and trolleys to prevent collisions or to limit the approach of adjacent bridges or trolleys. The system
100 COLLISION AVOIDANCE SYSTEM The 100 collision avoidance system is intended for use with bridges and trolleys to prevent collisions or to limit the approach of adjacent bridges or trolleys. The system
Interior Reconstruction under Occlusion and Clutter, based on the 3D Hough Transform
 School of Engineering and Science Bachelor s Thesis Interior Reconstruction under Occlusion and Clutter, based on the 3D Hough Remus-Claudiu Dumitru May 2012 First supervisor: Prof. Dr. Andreas Nüchter
School of Engineering and Science Bachelor s Thesis Interior Reconstruction under Occlusion and Clutter, based on the 3D Hough Remus-Claudiu Dumitru May 2012 First supervisor: Prof. Dr. Andreas Nüchter
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation
 A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
A Low Power, High Throughput, Fully Event-Based Stereo System: Supplementary Documentation Alexander Andreopoulos, Hirak J. Kashyap, Tapan K. Nayak, Arnon Amir, Myron D. Flickner IBM Research March 25,
Chapters 1 7: Overview
 Chapters 1 7: Overview Photogrammetric mapping: introduction, applications, and tools GNSS/INS-assisted photogrammetric and LiDAR mapping LiDAR mapping: principles, applications, mathematical model, and
Chapters 1 7: Overview Photogrammetric mapping: introduction, applications, and tools GNSS/INS-assisted photogrammetric and LiDAR mapping LiDAR mapping: principles, applications, mathematical model, and
AUTOMATIC EXTRACTION OF LARGE COMPLEX BUILDINGS USING LIDAR DATA AND DIGITAL MAPS
 AUTOMATIC EXTRACTION OF LARGE COMPLEX BUILDINGS USING LIDAR DATA AND DIGITAL MAPS Jihye Park a, Impyeong Lee a, *, Yunsoo Choi a, Young Jin Lee b a Dept. of Geoinformatics, The University of Seoul, 90
AUTOMATIC EXTRACTION OF LARGE COMPLEX BUILDINGS USING LIDAR DATA AND DIGITAL MAPS Jihye Park a, Impyeong Lee a, *, Yunsoo Choi a, Young Jin Lee b a Dept. of Geoinformatics, The University of Seoul, 90
BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS INTRODUCTION
 BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS I-Chieh Lee 1, Shaojun He 1, Po-Lun Lai 2, Alper Yilmaz 2 1 Mapping and GIS Laboratory 2 Photogrammetric Computer Vision Laboratory Dept. of Civil
BUILDING POINT GROUPING USING VIEW-GEOMETRY RELATIONS I-Chieh Lee 1, Shaojun He 1, Po-Lun Lai 2, Alper Yilmaz 2 1 Mapping and GIS Laboratory 2 Photogrammetric Computer Vision Laboratory Dept. of Civil
Efficient Surface and Feature Estimation in RGBD
 Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
Efficient Surface and Feature Estimation in RGBD Zoltan-Csaba Marton, Dejan Pangercic, Michael Beetz Intelligent Autonomous Systems Group Technische Universität München RGB-D Workshop on 3D Perception
MSc Geomatics thesis presentation. Validation and automatic repair of planar partitions using a constrained triangulation.
 MSc Geomatics thesis presentation Validation and automatic repair of planar partitions using a constrained triangulation Ken Arroyo Ohori Friday, 27 August 2010 at 10:00 Grote Vergaderzaal OTB Research
MSc Geomatics thesis presentation Validation and automatic repair of planar partitions using a constrained triangulation Ken Arroyo Ohori Friday, 27 August 2010 at 10:00 Grote Vergaderzaal OTB Research
How to Use Passive Infrared Sensor Cameras
 ACTi Knowledge Base Category: Application Note Sub-category: Hardware, Application Model: ACM-4201, ACM-4001, TCM-4201, TCM-4001 Firmware: N/A Software: N/A Author: Ando Meritee Published: 2010/08/23 Reviewed:
ACTi Knowledge Base Category: Application Note Sub-category: Hardware, Application Model: ACM-4201, ACM-4001, TCM-4201, TCM-4001 Firmware: N/A Software: N/A Author: Ando Meritee Published: 2010/08/23 Reviewed:
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Project: IEEE P Working Group for Wireless Personal Area Network (WPAN)
") Project: IEEE P802.15 Working Group for Wireless Personal Area Network (WPAN) Submission Title: [Ray-Tracing Simulation of the NICT Channel Measurements] Date Submitted: [18 July 2006] Source: [K. Sayrafian,
Project: IEEE P802.15 Working Group for Wireless Personal Area Network (WPAN) Submission Title: [Ray-Tracing Simulation of the NICT Channel Measurements] Date Submitted: [18 July 2006] Source: [K. Sayrafian,
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING
 CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
CLASSIFICATION FOR ROADSIDE OBJECTS BASED ON SIMULATED LASER SCANNING Kenta Fukano 1, and Hiroshi Masuda 2 1) Graduate student, Department of Intelligence Mechanical Engineering, The University of Electro-Communications,
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
3D BUILDING MODEL GENERATION FROM AIRBORNE LASERSCANNER DATA BY STRAIGHT LINE DETECTION IN SPECIFIC ORTHOGONAL PROJECTIONS
 3D BUILDING MODEL GENERATION FROM AIRBORNE LASERSCANNER DATA BY STRAIGHT LINE DETECTION IN SPECIFIC ORTHOGONAL PROJECTIONS Ellen Schwalbe Institute of Photogrammetry and Remote Sensing Dresden University
3D BUILDING MODEL GENERATION FROM AIRBORNE LASERSCANNER DATA BY STRAIGHT LINE DETECTION IN SPECIFIC ORTHOGONAL PROJECTIONS Ellen Schwalbe Institute of Photogrammetry and Remote Sensing Dresden University
The raycloud A Vision Beyond the Point Cloud
 The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
SEGMENTATION OF TIN-STRUCTURED SURFACE MODELS
 ISPRS SIPT IGU UCI CIG ACSG Table of contents Table des matières Authors index Index des auteurs Search Recherches Exit Sortir SEGMENTATION OF TIN-STRUCTURED SURFACE MODELS Ben Gorte Technical University
ISPRS SIPT IGU UCI CIG ACSG Table of contents Table des matières Authors index Index des auteurs Search Recherches Exit Sortir SEGMENTATION OF TIN-STRUCTURED SURFACE MODELS Ben Gorte Technical University
Real-Time Rendering (Echtzeitgraphik) Dr. Michael Wimmer
 Dr. Michael Wimmer") Real-Time Rendering (Echtzeitgraphik) Dr. Michael Wimmer wimmer@cg.tuwien.ac.at Visibility Overview Basics about visibility Basics about occlusion culling View-frustum culling / backface culling Occlusion
Real-Time Rendering (Echtzeitgraphik) Dr. Michael Wimmer wimmer@cg.tuwien.ac.at Visibility Overview Basics about visibility Basics about occlusion culling View-frustum culling / backface culling Occlusion
A New Protocol of CSI For The Royal Canadian Mounted Police
 A New Protocol of CSI For The Royal Canadian Mounted Police I. Introduction The Royal Canadian Mounted Police started using Unmanned Aerial Vehicles to help them with their work on collision and crime
A New Protocol of CSI For The Royal Canadian Mounted Police I. Introduction The Royal Canadian Mounted Police started using Unmanned Aerial Vehicles to help them with their work on collision and crime
3D Reconstruction with Tango. Ivan Dryanovski, Google Inc.
 3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
Unwrapping of Urban Surface Models
 Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment
 Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment Keiji NAGATANI 1, Takayuki Matsuzawa 1, and Kazuya Yoshida 1 Tohoku University Summary. During search missions
Scan-point Planning and 3-D Map Building for a 3-D Laser Range Scanner in an Outdoor Environment Keiji NAGATANI 1, Takayuki Matsuzawa 1, and Kazuya Yoshida 1 Tohoku University Summary. During search missions
3D Shape Modeling by Deformable Models. Ye Duan
 3D Shape Modeling by Deformable Models Ye Duan Previous Work Shape Reconstruction from 3D data. Volumetric image datasets. Unorganized point clouds. Interactive Mesh Editing. Vertebral Dataset Vertebral
3D Shape Modeling by Deformable Models Ye Duan Previous Work Shape Reconstruction from 3D data. Volumetric image datasets. Unorganized point clouds. Interactive Mesh Editing. Vertebral Dataset Vertebral
DOOR RECOGNITION IN CLUTTERED BUILDING INTERIORS USING IMAGERY AND LIDAR DATA
 DOOR RECOGNITION IN CLUTTERED BUILDING INTERIORS USING IMAGERY AND LIDAR DATA L. Díaz-Vilariño a, *, J. Martínez-Sánchez a, S. Lagüela a, J. Armesto a, K. Khoshelham b a Applied Geotechnologies Research
DOOR RECOGNITION IN CLUTTERED BUILDING INTERIORS USING IMAGERY AND LIDAR DATA L. Díaz-Vilariño a, *, J. Martínez-Sánchez a, S. Lagüela a, J. Armesto a, K. Khoshelham b a Applied Geotechnologies Research
Segmentation of 3D Photogrammetric Point Cloud for 3D Building Modeling
 Segmentation of 3D Photogrammetric Point Cloud for 3D Building Modeling EMRE ÖZDEMİR 1,2, Fabio Remondino 1 1 3D Optical Metrology unit Bruno Kessler Foundation (FBK) Trento, Italy https://3dom.fbk.eu
Segmentation of 3D Photogrammetric Point Cloud for 3D Building Modeling EMRE ÖZDEMİR 1,2, Fabio Remondino 1 1 3D Optical Metrology unit Bruno Kessler Foundation (FBK) Trento, Italy https://3dom.fbk.eu
Car Bed Chair Sofa Table
 Supplementary Material for the Paper Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan yuxiang@umich.edu Silvio Savarese Stanford University ssilvio@stanford.edu
Supplementary Material for the Paper Object Detection by 3D Aspectlets and Occlusion Reasoning Yu Xiang University of Michigan yuxiang@umich.edu Silvio Savarese Stanford University ssilvio@stanford.edu
Separating Objects and Clutter in Indoor Scenes
 Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Separating Objects and Clutter in Indoor Scenes Salman H. Khan School of Computer Science & Software Engineering, The University of Western Australia Co-authors: Xuming He, Mohammed Bennamoun, Ferdous
Background subtraction in people detection framework for RGB-D cameras
 Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
Background subtraction in people detection framework for RGB-D cameras Anh-Tuan Nghiem, Francois Bremond INRIA-Sophia Antipolis 2004 Route des Lucioles, 06902 Valbonne, France nghiemtuan@gmail.com, Francois.Bremond@inria.fr
ReFlx 100 PLUS COLLISION AVOIDANCE SYSTEM
 100 PLUS COLLISION AVOIDANCE SYSTEM The 100 Plus collision avoidance system is intended for use with bridges and trolleys to prevent collisions or to limit the approach of adjacent bridges or trolleys.
100 PLUS COLLISION AVOIDANCE SYSTEM The 100 Plus collision avoidance system is intended for use with bridges and trolleys to prevent collisions or to limit the approach of adjacent bridges or trolleys.
SceneNet: 3D Reconstruction of Videos Taken by the Crowd on GPU. Chen Sagiv SagivTech Ltd. GTC 2015 San Jose
 SceneNet: 3D Reconstruction of Videos Taken by the Crowd on GPU Chen Sagiv SagivTech Ltd. GTC 2015 San Jose Established in 2009 and headquartered in Israel Core domain expertise: GPU Computing and Computer
SceneNet: 3D Reconstruction of Videos Taken by the Crowd on GPU Chen Sagiv SagivTech Ltd. GTC 2015 San Jose Established in 2009 and headquartered in Israel Core domain expertise: GPU Computing and Computer
Cell Decomposition for Building Model Generation at Different Scales
 Cell Decomposition for Building Model Generation at Different Scales Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry Universität Stuttgart Germany forename.lastname@ifp.uni-stuttgart.de
Cell Decomposition for Building Model Generation at Different Scales Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry Universität Stuttgart Germany forename.lastname@ifp.uni-stuttgart.de
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically