3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform. Wenqi Zhu
|
|
|
- Gervais Stafford
- 6 years ago
- Views:
Transcription

1 3D Reconstruction From Multiple Views Based on Scale-Invariant Feature Transform Wenqi Zhu
2 Problem Statement! 3D reconstruction 3D reconstruction is a problem of recovering depth information from images. Physical point in space is projected onto different locations on images if the viewpoint for capturing the images is changed.the depth information is inferred from the difference in the projected locations. Page
3 Problem Statement! Given an image point x in the first image, how to find the corresponding point x in the other image? How does this constrain the position of x? Given a set of corresponding image points {x i x i }, i=1,,n, how to calibrate the cameras C,C? Given corresponding image points x i x i and cameras C, C, what is the position of X in space? Page
4 Overview! To Solve the corresponding problem. Based on the SIFT algorithm designed by Lowe. Camera Calibraion Suppose that we have already calibrated the cameras in this project. 3D reconstruction To compute the 3D points in space. Page
5 Introduction of SIFT Algorithm! Main Idea: SIFT algorithm is a local feature extracion algorithms, in the scale space looking for extrema points, extract the location, scale and rotation invariant. There are 4 basic steps taken by SIFT: 1.Scale-space extrema detection 2.Keypoint(feature matching point) localization 3.Orientation assignment 4.Local key point descriptor generation Page
6 Page
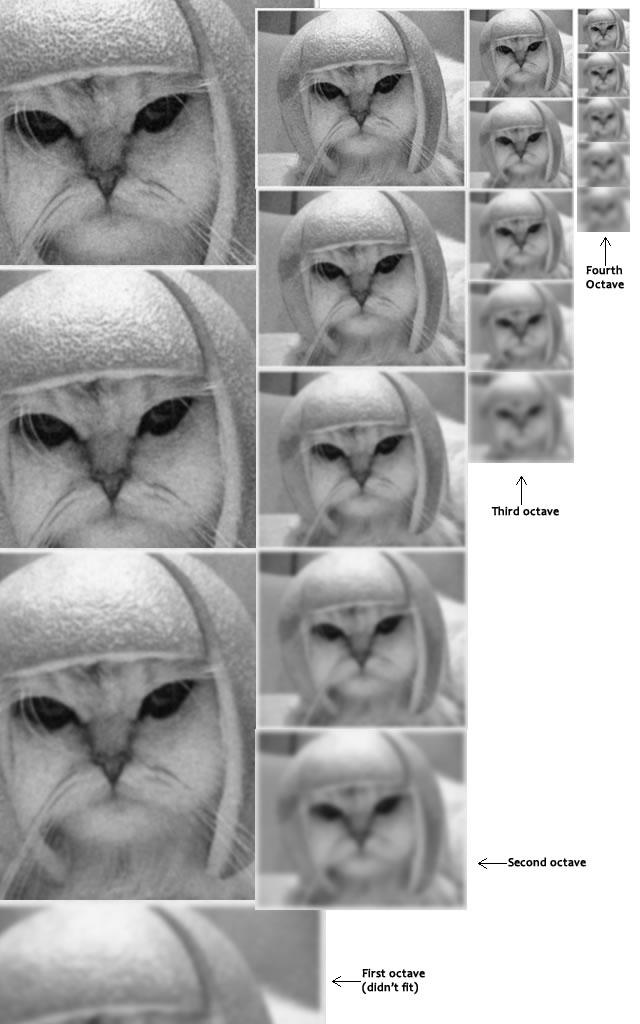
7 Step 1:Detection of scale-space extrema! The only possible scale-space kernel is the Gaussian function. Therefore, the scale space of an image is defined as a function, L(x; y; σ), that is produced from the convolution of a variablescale Gaussian, G(x; y;σ ), with an input image, I(x; y): Page
8 Step 1:Detection of scale-space extrema! To efficiently detect stable keypoint locations in scale space, Lowe proposed using scale-space extrema in the differenceof-gaussian function convolved with the image, Dog(x; y; σ ), which can be computed from the difference of two nearby scales separated by a constant multiplicative factor k: Page

9 Step 1:Detection of scale-space extrema! Page
, each sample point is compared to its eight neighbors in the current image and nine neighbors in the scale above and below.")
10 Step 1:Detection of scale-space extrema! In order to detect the local maxima and minima of Dog (x; y;σ), each sample point is compared to its eight neighbors in the current image and nine neighbors in the scale above and below. It is selected only if it is larger than all of these neighbors or smaller than all of them. The cost of this check is reasonably low due to the fact that most sample points will be eliminated following the first few checks. Maxima and minima of the difference-of- Gaussian images are detected by comparing a pixel (marked with X) to its 26 neighbors in 3x3 regions at the current and adjacent scales (marked with circles).
11 Step 2: Accurate keypoint localization! Once a keypoint candidate has been found by comparing a pixel to its neighbors, the next step is to perform a detailed fit to the nearby data for location, scale, and ratio of principal curvatures. This information allows points to be rejected that have low contrast (and are therefore sensitive to noise) or are poorly localized along an edge.
12 Step 3: Orientation assignment! For each image sample, L(x, y), at thisscale, the gradient magnitude, m(x, y), and orientation, ϴ (x, y) The orientation histogram has 36 bins covering the 360 degree range of orientations.

13 Step 3: Orientation assignment! Peaks are defined by dominant directions of local gradients. The highest peak in the histogram is detected, which the local peak that is within 80% of the highest peak is used to also create a keypoint with that orientation. Finally, SIFT Feature is described by location, scale, and orientation

14 Step 4: Local keypoint descriptor generation! In order to achieve orientation invariance, the coordinates of the descriptor and the gradient orientations are rotated relative to the keypoint orientation.
15 Feature points matching! After the SIFT feature vectors of the key points are created, the Euclidean distances between the feature vectors are exploited to measure the similarity of key points in different digital images. A feature point from one image is chosen, and then another two feature points are found by traversing all the feature points in another corresponding image which have the shortest and next-shortest Euclidean distances. Among these two feature points, if the divisor between the shortest and next-shortest Euclidean distances is less than a threshold value, then they are judged to be paired feature points.

16 Test!
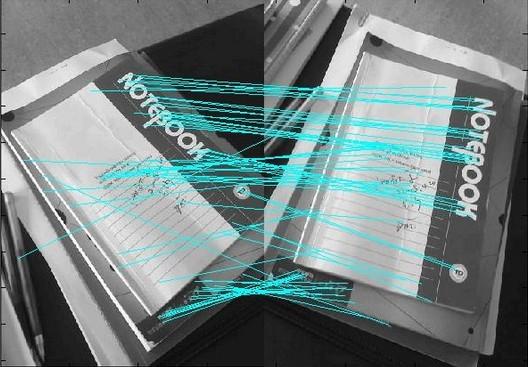
17 Test!
18 Overview! To Solve the corresponding problem. Based on the SIFT algorithm designed by Lowe. Camera Calibraion Suppose that we have already calibrated the cameras in this project. 3D reconstruction To compute the 3D points in space.
19 Application of Epipolar Geometry in Corresponding Problem! According to the epipolar geometry, we know the corresponding point must lie along the epipolar line. It can be used to emliminate the wrong matching points.

20 The improved SIFT algorithm! In SIFT algorithm, a feature point from one image is chosen, and then another two feature points are found by traversing all the feature points in another corresponding image which have the shortest and next-shortest Euclidean distances. By epipolar geometry, we only have to traverse those feature points along the epipolar lines.we compute the distance from matching points to the epipolar line. If the value is less than a certain value we supposed, we consider it a matching point. Here is the formula to compute this distance:
21 3D construction by two views! X
22 3D construction by two views! Given the image point p1(u1,v1),p2(u2,v2) corresponding to a desired scene point X. According to the pinhole camera model PCM: [x w y w z w ] T -> [u v] T z c [u1 v1 1] T = K R ([x w y w z w ] T - t) Or using homogeneous notation u~ = z c [u v 1] T, X w ~ = [x w y w z w 1] T we have the camera model in homogeneous coordinates u~ = M X w ~ where M is the 3x4 matrix M = [K*R -K*R*t] called the projective matrix.
23 3D construction by two views! Suppose that camera C1 and C2 are calibrated, M1 and M2 are their projective matrix. So we have Where c1,c2,and m ij can be obtained by camera calibration.

24 3D construction by two views! By eliminating Zc1 or Zc2, we get four formulas about X,Y,Z: X,Y,Z can be obtained by any three of above formulas.
25 3D construction by multiple views! In this project, we propose a method to solve the 3D construction by multiple views. It is based on the two-views 3D construction theory we have discussed above. The most important problems to be solved: feature matching among a set of images transform the coordinates of a set of 3D points we have got.
26 Feature matching for multiple views! pic1 pic2 pic3 pic4 If p 1 12 and p 1 21 are matching points, p 2 34 and p 2 43 are matching points, p 1 21 and p 2 34 are matching points, we can infer that any two of those four points are matching points mutually.
27 image1 image2 image3 image4 Feature extraction Feature extraction Feature extraction Feature extraction Feature matching Feature matching Feature matching Camera Calibration Compute 3D points Commen feature matching Compute 3D points Camera Calibration Commen 3D points Transform
28 Suppose we compute a set of 3D points X={xi} (i=1,2...n) from Pic1 and Pic2, and another set of 3D points Y={yi}(i=1,2,...n)from Pic3 and Pic4, now we want to transform them into the same coordinate system. We can use this method: There is a similarity transformation between the two sets of 3D points. Y= c*r*x+t So if we get the scale factor c, the rotation matrix R and the translation matrix T, we can transform those two sets of 3D points.
29 According to least-squares estimation of transformation parameters between two point patterns let
30
31 Goals for completing the project! Use the improved SIFT algorithm to finish the feature matching among images. Compute several sets of 3D points from those feature matching points. Programing on Matlab. (minimum goal) Unified the 3D points coordinate system by least-squares estimation of transformation parameters between two point patterns. (if there is time after minimum goal)
32 The End Thanks for listening!
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
SIFT: Scale Invariant Feature Transform
 1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
1 / 25 SIFT: Scale Invariant Feature Transform Ahmed Othman Systems Design Department University of Waterloo, Canada October, 23, 2012 2 / 25 1 SIFT Introduction Scale-space extrema detection Keypoint
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
A Novel Algorithm for Color Image matching using Wavelet-SIFT
 International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
International Journal of Scientific and Research Publications, Volume 5, Issue 1, January 2015 1 A Novel Algorithm for Color Image matching using Wavelet-SIFT Mupuri Prasanth Babu *, P. Ravi Shankar **
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Scale Invariant Feature Transform by David Lowe
 Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Scale Invariant Feature Transform by David Lowe Presented by: Jerry Chen Achal Dave Vaishaal Shankar Some slides from Jason Clemons Motivation Image Matching Correspondence Problem Desirable Feature Characteristics
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Ulas Bagci
 CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
CAP5415- Computer Vision Lecture 5 and 6- Finding Features, Affine Invariance, SIFT Ulas Bagci bagci@ucf.edu 1 Outline Concept of Scale Pyramids Scale- space approaches briefly Scale invariant region selecqon
Computational Optical Imaging - Optique Numerique. -- Multiple View Geometry and Stereo --
 Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Computational Optical Imaging - Optique Numerique -- Multiple View Geometry and Stereo -- Winter 2013 Ivo Ihrke with slides by Thorsten Thormaehlen Feature Detection and Matching Wide-Baseline-Matching
Faster Image Feature Extraction Hardware
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 33-38 www.iosrjournals.org Jibu J.V, Sherin Das, Mini Kumari G Assistant Professor,College of Engineering, Chengannur.Alappuzha,
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 33-38 www.iosrjournals.org Jibu J.V, Sherin Das, Mini Kumari G Assistant Professor,College of Engineering, Chengannur.Alappuzha,
Multi-view 3D reconstruction. Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching
 Multi-view 3D reconstruction Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching Problem Given m images of n scene points captured from different viewpoints,
Multi-view 3D reconstruction Problem formulation Projective ambiguity Rectification Autocalibration Feature points and their matching Problem Given m images of n scene points captured from different viewpoints,
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Distinctive Image Features from Scale-Invariant Keypoints
 International Journal of Computer Vision 60(2), 91 110, 2004 c 2004 Kluwer Academic Publishers. Manufactured in The Netherlands. Distinctive Image Features from Scale-Invariant Keypoints DAVID G. LOWE
International Journal of Computer Vision 60(2), 91 110, 2004 c 2004 Kluwer Academic Publishers. Manufactured in The Netherlands. Distinctive Image Features from Scale-Invariant Keypoints DAVID G. LOWE
Comparison of Feature Detection and Matching Approaches: SIFT and SURF
 GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
GRD Journals- Global Research and Development Journal for Engineering Volume 2 Issue 4 March 2017 ISSN: 2455-5703 Comparison of Detection and Matching Approaches: SIFT and SURF Darshana Mistry PhD student
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
THE ANNALS OF DUNAREA DE JOS UNIVERSITY OF GALATI FASCICLE III, 2007 ISSN X ELECTROTECHNICS, ELECTRONICS, AUTOMATIC CONTROL, INFORMATICS
 ELECTROTECHNICS, ELECTRONICS, AUTOMATIC CONTROL, INFORMATICS SIFT BASE ALGORITHM FOR POINT FEATURE TRACKING Adrian Burlacu, Cosmin Copot and Corneliu Lazar Gh. Asachi Technical University of Iasi, epartment
ELECTROTECHNICS, ELECTRONICS, AUTOMATIC CONTROL, INFORMATICS SIFT BASE ALGORITHM FOR POINT FEATURE TRACKING Adrian Burlacu, Cosmin Copot and Corneliu Lazar Gh. Asachi Technical University of Iasi, epartment
ACEEE Int. J. on Information Technology, Vol. 02, No. 01, March 2012
 Feature Tracking of Objects in Underwater Video Sequences Prabhakar C J & Praveen Kumar P U Department of P.G. Studies and Research in Computer Science Kuvempu University, Shankaraghatta - 577451 Karnataka,
Feature Tracking of Objects in Underwater Video Sequences Prabhakar C J & Praveen Kumar P U Department of P.G. Studies and Research in Computer Science Kuvempu University, Shankaraghatta - 577451 Karnataka,
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Verslag Project beeldverwerking A study of the 2D SIFT algorithm
 Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
Faculteit Ingenieurswetenschappen 27 januari 2008 Verslag Project beeldverwerking 2007-2008 A study of the 2D SIFT algorithm Dimitri Van Cauwelaert Prof. dr. ir. W. Philips dr. ir. A. Pizurica 2 Content
A Comparison of SIFT and SURF
 A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
A Comparison of SIFT and SURF P M Panchal 1, S R Panchal 2, S K Shah 3 PG Student, Department of Electronics & Communication Engineering, SVIT, Vasad-388306, India 1 Research Scholar, Department of Electronics
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Distinctive Image Features from Scale-Invariant Keypoints
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada Draft: Submitted for publication. This version:
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada Draft: Submitted for publication. This version:
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Pictures at an Exhibition
 Pictures at an Exhibition Han-I Su Department of Electrical Engineering Stanford University, CA, 94305 Abstract We employ an image identification algorithm for interactive museum guide with pictures taken
Pictures at an Exhibition Han-I Su Department of Electrical Engineering Stanford University, CA, 94305 Abstract We employ an image identification algorithm for interactive museum guide with pictures taken
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
IMAGE MATCHING USING SCALE INVARIANT FEATURE TRANSFORM (SIFT) Naotoshi Seo and David A. Schug
 Naotoshi Seo and David A. Schug") IMAGE MATCHING USING SCALE INVARIANT FEATURE TRANSFORM (SIFT) Naotoshi Seo and David A. Schug University of Maryland ENEE631 Digital Image and Video Processing Final Project Professor: Min Wu ABSTRACT
IMAGE MATCHING USING SCALE INVARIANT FEATURE TRANSFORM (SIFT) Naotoshi Seo and David A. Schug University of Maryland ENEE631 Digital Image and Video Processing Final Project Professor: Min Wu ABSTRACT
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
3D Object Recognition using Multiclass SVM-KNN
 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Distinctive Image Features from Scale-Invariant Keypoints
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada lowe@cs.ubc.ca January 5, 2004 Abstract This paper
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe Computer Science Department University of British Columbia Vancouver, B.C., Canada lowe@cs.ubc.ca January 5, 2004 Abstract This paper
CSE152 Introduction to Computer Vision Assignment 3 (SP15) Instructor: Ben Ochoa Maximum Points : 85 Deadline : 11:59 p.m., Friday, 29-May-2015
 Instructor: Ben Ochoa Maximum Points : 85 Deadline : 11:59 p.m., Friday, 29-May-2015") Instructions: CSE15 Introduction to Computer Vision Assignment 3 (SP15) Instructor: Ben Ochoa Maximum Points : 85 Deadline : 11:59 p.m., Friday, 9-May-015 This assignment should be solved, and written
Instructions: CSE15 Introduction to Computer Vision Assignment 3 (SP15) Instructor: Ben Ochoa Maximum Points : 85 Deadline : 11:59 p.m., Friday, 9-May-015 This assignment should be solved, and written
CS223b Midterm Exam, Computer Vision. Monday February 25th, Winter 2008, Prof. Jana Kosecka
 CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
IJMTES International Journal of Modern Trends in Engineering and Science ISSN:
 A Novel Method to Count the Number of Cars in an Unmanned Aerial Vehicle Images A.Mathavaraja 1, R.Sathyamoorthy 1 (Department of ECE, UG Student, IFET college of engineering, Villupuram, Tamilnadu,mathavarajaifet@gmail.com)
A Novel Method to Count the Number of Cars in an Unmanned Aerial Vehicle Images A.Mathavaraja 1, R.Sathyamoorthy 1 (Department of ECE, UG Student, IFET college of engineering, Villupuram, Tamilnadu,mathavarajaifet@gmail.com)
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Matlab Image features -- Interest points Point descriptors Homework 1 2 Basic MATLAB Commands 3 Basic MATLAB
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Matlab Image features -- Interest points Point descriptors Homework 1 2 Basic MATLAB Commands 3 Basic MATLAB
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Pictures at an Exhibition: EE368 Project
 Pictures at an Exhibition: EE368 Project Jacob Mattingley Stanford University jacobm@stanford.edu Abstract This report presents an algorithm which matches photographs of paintings to a small database.
Pictures at an Exhibition: EE368 Project Jacob Mattingley Stanford University jacobm@stanford.edu Abstract This report presents an algorithm which matches photographs of paintings to a small database.
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Final Review CMSC 733 Fall 2014
 Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
Final Review CMSC 733 Fall 2014 We have covered a lot of material in this course. One way to organize this material is around a set of key equations and algorithms. You should be familiar with all of these,
A SIFT Descriptor with Global Context
 A SIFT Descriptor with Global Context Eric N. Mortensen Oregon State University enm@eecs.oregonstate.edu Hongli Deng Oregon State University deng@eecs.oregonstate.edu Linda Shapiro University of Washington
A SIFT Descriptor with Global Context Eric N. Mortensen Oregon State University enm@eecs.oregonstate.edu Hongli Deng Oregon State University deng@eecs.oregonstate.edu Linda Shapiro University of Washington
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
A Survey on Face-Sketch Matching Techniques
 A Survey on Face-Sketch Matching Techniques Reshma C Mohan 1, M. Jayamohan 2, Arya Raj S 3 1 Department of Computer Science, SBCEW 2 Department of Computer Science, College of Applied Science 3 Department
A Survey on Face-Sketch Matching Techniques Reshma C Mohan 1, M. Jayamohan 2, Arya Raj S 3 1 Department of Computer Science, SBCEW 2 Department of Computer Science, College of Applied Science 3 Department
A Comparison and Matching Point Extraction of SIFT and ISIFT
 A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Visual Navigation for Flying Robots. Structure From Motion
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Structure From Motion Dr. Jürgen Sturm VISNAV Oral Team Exam Date and Time Student Name Student Name Student Name Mon, July
Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade
 CS 763 Ajit Rajwade") Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade What is SIFT? It is a technique for detecting salient stable feature points in an image. For ever such point it also provides a set of features
Scale Invariant Feature Transform (SIFT) CS 763 Ajit Rajwade What is SIFT? It is a technique for detecting salient stable feature points in an image. For ever such point it also provides a set of features
Car Detecting Method using high Resolution images
 Car Detecting Method using high Resolution images Swapnil R. Dhawad Department of Electronics and Telecommunication Engineering JSPM s Rajarshi Shahu College of Engineering, Savitribai Phule Pune University,
Car Detecting Method using high Resolution images Swapnil R. Dhawad Department of Electronics and Telecommunication Engineering JSPM s Rajarshi Shahu College of Engineering, Savitribai Phule Pune University,
An Exploration of the SIFT Operator. Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79
 An Exploration of the SIFT Operator Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79 Jonathan Rihan Student number: 04073838 September 1, 2005 Dissertation Plan: An Exploration
An Exploration of the SIFT Operator Module number: P00999 Supervisor: Prof. Philip H. S. Torr Course code: CM79 Jonathan Rihan Student number: 04073838 September 1, 2005 Dissertation Plan: An Exploration
Invariant Local Feature for Image Matching
 Invariant Local Feature for Image Matching Wong Yuk-Man Term Paper for the Degree of Master of Philosophy in Computer Science and Engineering Supervised by Prof. Michael R. Lyu c The Chinese University
Invariant Local Feature for Image Matching Wong Yuk-Man Term Paper for the Degree of Master of Philosophy in Computer Science and Engineering Supervised by Prof. Michael R. Lyu c The Chinese University
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
AIR FORCE INSTITUTE OF TECHNOLOGY
 Forensics Image Background Matching Using Scale Invariant Feature transform (SIFT) And Speeded Up Robust Features (SURF) THESIS Paul N. Fogg II, AFIT/GCE/ENG/08-02 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY
Forensics Image Background Matching Using Scale Invariant Feature transform (SIFT) And Speeded Up Robust Features (SURF) THESIS Paul N. Fogg II, AFIT/GCE/ENG/08-02 DEPARTMENT OF THE AIR FORCE AIR UNIVERSITY
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching