Local features and image matching. Prof. Xin Yang HUST
|
|
|
- Noel Miller
- 5 years ago
- Views:
Transcription
1 Local features and image matching Prof. Xin Yang HUST
2 Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source image, compute a transformed image of source based on T Image mosaics Given two images, compute the transformation between them and blend them based on image warping
3 Today How to detect which features to match? Computing local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches
4 Kristen Grauman Local features: main components 1) Detection: Identify the interest points 2) Description: Extract vector feature descriptor surrounding each interest point. x (1) [ x,, x (1) 1 1 d ] 3) Matching: Determine correspondence between descriptors in two views x (2) [ x,, x (2) 2 1 d ]
5 Local features: desired properties Repeatability The same feature can be found in several images despite geometric and photometric transformations Saliency Each feature has a distinctive description Compactness and efficiency Many fewer features than image pixels Locality A feature occupies a relatively small area of the image; robust to clutter and occlusion
6 Goal: interest operator repeatability We want to detect (at least some of) the same points in both images No chance to find true matches! Yet we have to be able to run the detection procedure independently per image
7 Goal: descriptor distinctiveness We want to be able to reliably determine which point goes with which? Must provide some invariance to geometric and photometric differences between the two views
8 Local features: main components 1) Detection: Identify the interest points 2) Description: Extract vector feature descriptor surrounding each interest point. 3) Matching: Determine correspondence between descriptors in two views
9 What points would you choose?
10 Corners as distinctive interest points We should easily recognize the point by looking through a small window Shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction corner : significant change in all directions Slide credit: Alyosha Efros, Darya Frolova, Denis Simakov
, ( x I")



11 y y y x y x x x I I I I I I I I y x w M ), ( x I I x y I I y y I x I I I y x Corners as distinctive interest points 2 x 2 matrix of image derivatives (averaged in neighborhood of a point) Notation:
12 What does this matrix reveal? First, consider an axis-aligned corner:
13 y y x y x x I I I I I I M First, consider an axis-aligned corner: This means dominant gradient directions align with x or y axis Look for locations where both λ s are large If either λ is close to 0, then this is not corner-like What if we have a corner that is not aligned with the image axes? What does this matrix reveal?
14 What does this matrix reveal? Since M is symmetric, we have M X X 2 T Mx i x i i The eigenvalues of M reveal the amount of intensity change in the two principal orthogonal gradient directions in the window
15 Corner response function edge : 1 >> 2 2 >> 1 corner : 1 and 2 are large, 1 ~ 2 ; flat region 1 and 2 are small;
16 Harris corner detector 1) Compute M matrix for each image window to get their cornerness scores. 2) Find points whose surrounding window gave large corner response (f> threshold) 3) Take the points of local maxima, i.e., perform nonmaximum suppression

17 Kristen Grauman Example of Harris application

18 Kristen Grauman Example of Harris application Compute corner response at every pixel.

19 Kristen Grauman Example of Harris application

20 Harris Detector: Steps

21 Harris Detector: Steps Compute corner response f

22 Harris Detector: Steps Find points with large corner response: f > threshold

23 Harris Detector: Steps Take only the points of local maxima of f
24 Harris Detector: Steps
25 Properties of the Harris corner detector Rotation invariant? Yes M X X 2 T Scale invariant?
26 Properties of the Harris corner detector Rotation invariant? Yes Scale invariant? No All points will be classified as edges Corner!


27 Scale invariant interest points How can we independently select interest points in each image, such that the detections are repeatable across different scales?
28 Automatic scale selection Intuition: Find scale that gives local maxima of some function f in both position and scale f Image 1 f Image 2 s 1 region size s 2 region size
29 What can be the signature function?
30 Recall: Edge detection f Edge d dx g Derivative of Gaussian f d dx g Edge = maximum of derivative Source: S. Seitz
31 Recall: Edge detection f Edge d dx 2 2 g Second derivative of Gaussian (Laplacian) d dx 2 f 2 g Edge = zero crossing of second derivative Source: S. Seitz
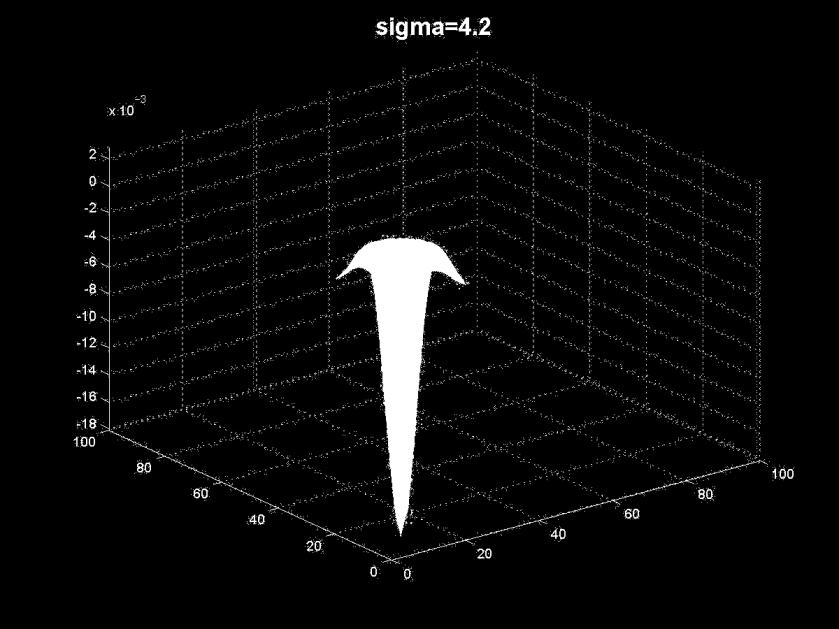
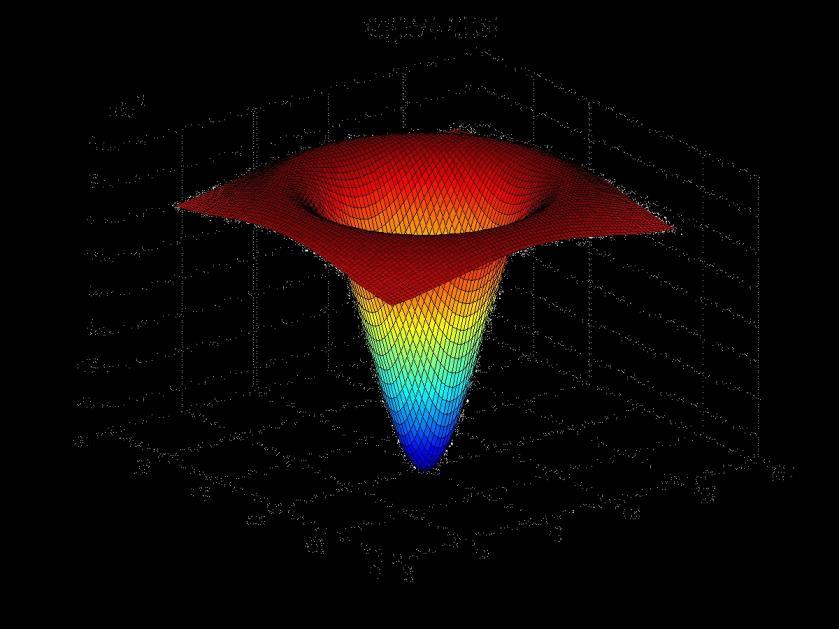
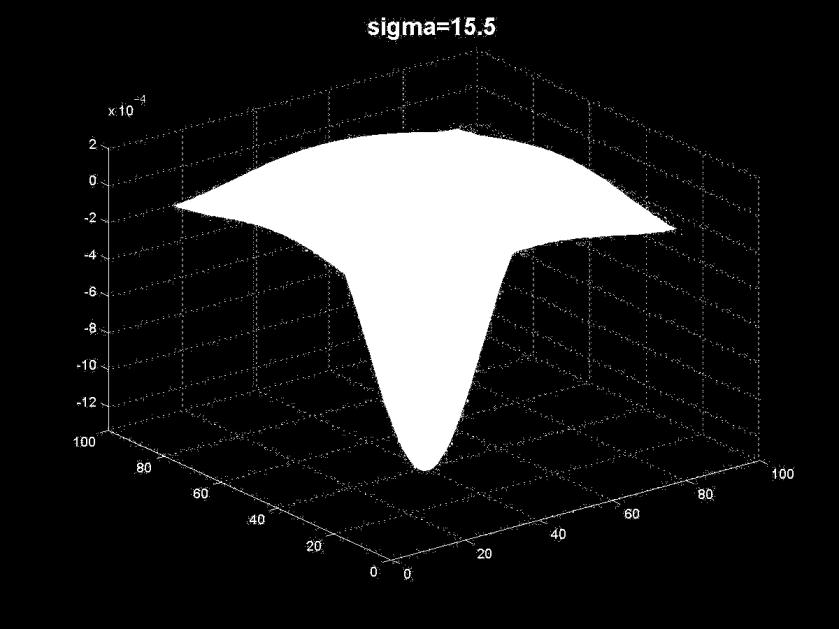
32 Edge = ripple From edges to blobs Blob = superposition of two ripples maximum Spatial selection: the magnitude of the Laplacian response will achieve a maximum at the center of the blob, provided the scale of the Laplacian is matched to the scale of the blob Slide credit: Lana Lazebnik


33 Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g 2 x g 2 2 y g 2


34 filter scales Blob detection in 2D: scale selection g g Laplacian-of-Gaussian = blob detector g 2 2 x y Bastian Leibe img1 img2 img3

35 Blob detection in 2D We define the characteristic scale as the scale that produces peak of Laplacian response characteristic scale Slide credit: Lana Lazebnik
36 Example Original image at ¾ the size Kristen Grauman


37 Original image at ¾ the size Kristen Grauman


38 Kristen Grauman

39 Kristen Grauman

40 Kristen Grauman

41 Kristen Grauman


42 Kristen Grauman


 L")

43 Scale invariant interest points Interest points are local maxima in both position and scale. 5 4 scale L xx ( ) L ( ) yy 3 2 Squared filter response maps 1 List of (x, y, σ)

44 Scale-space blob detector: Example Image credit: Lana Lazebnik
 (,, ) (Laplacian) DoG G( x, y, k) G( x, y, ) (Difference of Gaussians) Technical")
45 We can approximate the Laplacian with a difference of Gaussians; more efficient to implement 2 L Gxx x y Gyy x y (,, ) (,, ) (Laplacian) DoG G( x, y, k) G( x, y, ) (Difference of Gaussians) Technical detail
46
47 Local features: main components 1) Detection: Identify the interest points 2) Description:Extract vector feature descriptor surrounding each interest point. 3) Matching: Determine correspondence between descriptors in two views x (1) [ x,, x (1) 1 1 d x ] (2) [ x,, x (2) 2 1 d ]

48 Geometric transformations e.g. scale, translation, rotation

49 Photometric transformations Figure from T. Tuytelaars ECCV 2006 tutorial
50 Raw patches as local descriptors The simplest way to describe the neighborhood around an interest point is to write down the list of intensities to form a feature vector. But this is very sensitive to even small shifts, rotations.
![SIFT descriptor [Lowe 2004] Use histograms](/docs-images/86/94876199/images/51-0.jpg "to bin pixels within sub-patches according")

51 SIFT descriptor [Lowe 2004] Use histograms to bin pixels within sub-patches according to their orientation. 0 2 p Why subpatches? Why does SIFT have some illumination invariance?


52 Making descriptor rotation invariant CSE 576: Computer Vision Rotate patch according to its dominant gradient orientation This puts the patches into a canonical orientation. Image from Matthew Brown
![Steve Seitz SIFT descriptor [Lowe 2004] Extraordinarily robust matching technique Can handle](/docs-images/86/94876199/images/53-0.jpg "changes in viewpoint Up to about 60 degree out of plane rotation Can handle significant changes in")
 Fast and efficient can run in real time Lots of code available http://people.csail.")
53 Steve Seitz SIFT descriptor [Lowe 2004] Extraordinarily robust matching technique Can handle changes in viewpoint Up to about 60 degree out of plane rotation Can handle significant changes in illumination Sometimes even day vs. night (below) Fast and efficient can run in real time Lots of code available

54 Example NASA Mars Rover images

55 Example NASA Mars Rover images with SIFT feature matches Figure by Noah Snavely
56 SIFT properties Invariant to Scale Rotation Partially invariant to Illumination changes Camera viewpoint Occlusion, clutter
57 Local features: main components 1) Detection: Identify the interest points 2) Description:Extract vector feature descriptor surrounding each interest point. 3) Matching: Determine correspondence between descriptors in two views
58 Kristen Grauman Matching local features
59 Matching local features? Image 1 Image 2 To generate candidate matches, find patches that have the most similar appearance (e.g., lowest SSD) Simplest approach: compare them all, take the closest (or closest k, or within a thresholded distance) Kristen Grauman


60 Ambiguous matches???? At what SSD value do we have a good match? To add robustness to matching, can consider ratio : distance to best match / distance to second best match Kristen Grauman Image 1 Image 2 If low, first match looks good. If high, could be ambiguous match.
61 Matching SIFT Descriptors Nearest neighbor (Euclidean distance) Threshold ratio of nearest to 2 nd nearest descriptor Lowe IJCV 2004


62 Recap: robust feature-based alignment Source: L. Lazebnik
63 Recap: robust feature-based alignment Extract features Source: L. Lazebnik
64 Recap: robust feature-based alignment Extract features Compute putative matches Source: L. Lazebnik
65 Recap: robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize transformation T (small group of putative matches that are related by T) Source: L. Lazebnik
66 Recap: robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize transformation T (small group of putative matches that are related by T) Verify transformation (search for other matches consistent with T) Source: L. Lazebnik
 Verify transformation (search for other matches consistent with T) Source: L.")
67 Recap: robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize transformation T (small group of putative matches that are related by T) Verify transformation (search for other matches consistent with T) Source: L. Lazebnik
68 Recent Work for Local Features Bay, H., Ess, A., Tuytelaars, T. and Gool, L.V., SURF: Speeded-Up Robust Features. In Proc. of ECCV 06. Calonder, M., Lepetit, V., Strecha, C., and Fua, P., Brief: Binary Robust Independent Elementary Features. In Proc. of ECCV 10. Rublee, E., Rabaud, V., Konolige, K., and Bradski, G., ORB: an Efficient Alternative to SIFT or SURF. In Proc. of ICCV 11, Barcelona, Spain. Leutenegger, S., Chli, M., Siegwart, R., BRISK: Binary Robust Invariant Scalable Keypoints. In Proc. of CVPR 11. Alahi, A., Ortiz, R., and Vandergheynst, P., FREAK: Fast Retinal Keypoint, In Proc. of CVPR 12. Yang, X. and Cheng, K. T., LDB: An Ultra-Fast Feature for Scalable Augmented Reality on Mobile Device. In Proc. of ISMAR 12. Calonder, M., Lepetit, V., Konolige K., Bowman, J., Mihelich, P., and Fua, P., Compact Signatures for High-Speed Interest Point Description and Matching, In Proc. of ICCV 09. Winder, S., and Brown, M., Learning Local Image Descriptors, In Proc. of CVPR 07. Winder, S., Hua, G., and Brown, M., Picking the Best DAISY, In Proc. of CVPR 09. Calonder, M., Lepetit, V., Konolige K., Bowman, J., Mihelich, P., and Fua, P., Compact Signatures for High-Speed Interest Point Description and Matching, In Proc. of ICCV 09. Rosten, E., Porter, R., and Drummond, T., Faster and Better: A machine learning approach to corner detection. IEEE Trans. PAMI, 32: , 2010.
69 Applications of local invariant features Wide baseline stereo Motion tracking Panoramas Mobile robot navigation 3D reconstruction Recognition



70 Automatic mosaicing

71 Wide baseline stereo [Image from T. Tuytelaars ECCV 2006 tutorial]





72 Recognition of specific objects, scenes Schmid and Mohr 1997 Sivic and Zisserman, 2003 Kristen Grauman Rothganger et al Lowe 2002
73 Summary Interest point detection Harris corner detector Laplacian of Gaussian, automatic scale selection Invariant descriptors Rotation according to dominant gradient direction Histograms for robustness to small shifts and translations (SIFT descriptor)
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Local Patch Descriptors
 Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Local Patch Descriptors Slides courtesy of Steve Seitz and Larry Zitnick CSE 803 1 How do we describe an image patch? How do we describe an image patch? Patches with similar content should have similar
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Local features and image matching May 8 th, 2018
 Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Local features and image matcing May 8 t, 2018 Yong Jae Lee UC Davis Last time RANSAC for robust fitting Lines, translation Image mosaics Fitting a 2D transformation Homograpy 2 Today Mosaics recap: How
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Lecture 6: Finding Features (part 1/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Stanford Vision Lab 1 What we will learn today? Local invariant features MoOvaOon Requirements, invariances Keypoint
Wikipedia - Mysid
 Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
Wikipedia - Mysid Erik Brynjolfsson, MIT Filtering Edges Corners Feature points Also called interest points, key points, etc. Often described as local features. Szeliski 4.1 Slides from Rick Szeliski,
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
A Hybrid Feature Extractor using Fast Hessian Detector and SIFT
 Technologies 2015, 3, 103-110; doi:10.3390/technologies3020103 OPEN ACCESS technologies ISSN 2227-7080 www.mdpi.com/journal/technologies Article A Hybrid Feature Extractor using Fast Hessian Detector and
Technologies 2015, 3, 103-110; doi:10.3390/technologies3020103 OPEN ACCESS technologies ISSN 2227-7080 www.mdpi.com/journal/technologies Article A Hybrid Feature Extractor using Fast Hessian Detector and
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Bias-Variance Trade-off (cont d) + Image Representations
 + Image Representations") CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
CS 275: Machine Learning Bias-Variance Trade-off (cont d) + Image Representations Prof. Adriana Kovashka University of Pittsburgh January 2, 26 Announcement Homework now due Feb. Generalization Training
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Click to edit title style
 Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Class 2: Low-level Representation Liangliang Cao, Jan 31, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Visual Recognition
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Today. Main questions 10/30/2008. Bag of words models. Last time: Local invariant features. Harris corner detector: rotation invariant detection
 Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Today Indexing with local features, Bag of words models Matching local features Indexing features Bag of words model Thursday, Oct 30 Kristen Grauman UT-Austin Main questions Where will the interest points
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Robust Binary Feature using the Intensity Order
 Robust Binary Feature using the Intensity Order Yukyung Choi*, Chaehoon Park*, Joon-Young Lee, and In So Kweon Robotics and Computer Vision Lab., KAIST, Korea Abstract. Binary features have received much
Robust Binary Feature using the Intensity Order Yukyung Choi*, Chaehoon Park*, Joon-Young Lee, and In So Kweon Robotics and Computer Vision Lab., KAIST, Korea Abstract. Binary features have received much
Feature Matching and RANSAC
 Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Lecture 4.1 Feature descriptors. Trym Vegard Haavardsholm
 Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Lecture 4.1 Feature descriptors Trym Vegard Haavardsholm Feature descriptors Histogram of Gradients (HoG) descriptors Binary descriptors 2 Histogram of Gradients (HOG) descriptors Scale Invariant Feature
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
State-of-the-Art: Transformation Invariant Descriptors. Asha S, Sreeraj M
 International Journal of Scientific & Engineering Research, Volume 4, Issue ş, 2013 1994 State-of-the-Art: Transformation Invariant Descriptors Asha S, Sreeraj M Abstract As the popularity of digital videos
International Journal of Scientific & Engineering Research, Volume 4, Issue ş, 2013 1994 State-of-the-Art: Transformation Invariant Descriptors Asha S, Sreeraj M Abstract As the popularity of digital videos
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization
 Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization Jung H. Oh, Gyuho Eoh, and Beom H. Lee Electrical and Computer Engineering, Seoul National University,
Appearance-Based Place Recognition Using Whole-Image BRISK for Collaborative MultiRobot Localization Jung H. Oh, Gyuho Eoh, and Beom H. Lee Electrical and Computer Engineering, Seoul National University,
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Object Recognition Based on ORB Descriptor for Markerless Augmented Reality
 Object Recognition Based on ORB Descriptor for Markerless Augmented Reality Mahfoud HAMIDIA 1,2, Nadia ZENATI-HENDA 1 1 Centre de Développement des Technologies Avancées, CDTA, B.P. 17, 16303, Baba-Hassen,
Object Recognition Based on ORB Descriptor for Markerless Augmented Reality Mahfoud HAMIDIA 1,2, Nadia ZENATI-HENDA 1 1 Centre de Développement des Technologies Avancées, CDTA, B.P. 17, 16303, Baba-Hassen,
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Multi-modal Registration of Visual Data. Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy
 Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
Multi-modal Registration of Visual Data Massimiliano Corsini Visual Computing Lab, ISTI - CNR - Italy Overview Introduction and Background Features Detection and Description (2D case) Features Detection
A Fuzzy Brute Force Matching Method for Binary Image Features
 A Fuzzy Brute Force Matching Method for Binary Image Features Erkan Bostanci 1, Nadia Kanwal 2 Betul Bostanci 3 and Mehmet Serdar Guzel 1 1 (Computer Engineering Department, Ankara University, Turkey {ebostanci,
A Fuzzy Brute Force Matching Method for Binary Image Features Erkan Bostanci 1, Nadia Kanwal 2 Betul Bostanci 3 and Mehmet Serdar Guzel 1 1 (Computer Engineering Department, Ankara University, Turkey {ebostanci,
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
SURF. Lecture6: SURF and HOG. Integral Image. Feature Evaluation with Integral Image
 SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
SURF CSED441:Introduction to Computer Vision (2015S) Lecture6: SURF and HOG Bohyung Han CSE, POSTECH bhhan@postech.ac.kr Speed Up Robust Features (SURF) Simplified version of SIFT Faster computation but
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 01/11/2016 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Implementation and Comparison of Feature Detection Methods in Image Mosaicing
 IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) e-issn: 2278-2834,p-ISSN: 2278-8735 PP 07-11 www.iosrjournals.org Implementation and Comparison of Feature Detection Methods in Image
Stitching and Blending
 Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Stitching and Blending Kari Pulli VP Computational Imaging Light First project Build your own (basic) programs panorama HDR (really, exposure fusion) The key components register images so their features
Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images
 Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images Ebrahim Karami, Siva Prasad, and Mohamed Shehata Faculty of Engineering and Applied Sciences, Memorial University,
Image Matching Using SIFT, SURF, BRIEF and ORB: Performance Comparison for Distorted Images Ebrahim Karami, Siva Prasad, and Mohamed Shehata Faculty of Engineering and Applied Sciences, Memorial University,
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
CS 556: Computer Vision. Lecture 3
 CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
CS 556: Computer Vision Lecture 3 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Interest Points Harris corners Hessian points SIFT Difference-of-Gaussians SURF 2 Properties of Interest Points Locality
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching
 Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
An Algorithm for Medical Image Registration using Local Feature Modal Mapping
 An Algorithm for Medical Image Registration using Local Feature Modal Mapping Cundong Tang, Shangke Quan,Xinfeng Yang * School of Computer and Information Engineering, Nanyang Institute of Technology,
An Algorithm for Medical Image Registration using Local Feature Modal Mapping Cundong Tang, Shangke Quan,Xinfeng Yang * School of Computer and Information Engineering, Nanyang Institute of Technology,
A Comparison and Matching Point Extraction of SIFT and ISIFT
 A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
Modern to Historic Image Matching: ORB/SURF an Effective Matching Technique
 Modern to Historic Image Matching: ORB/SURF an Effective Matching Technique Heider K. Ali Carleton University Department of Systems and Computer Eng. Ottawa, ON, K1S 5B8, CANADA heider@sce.carleton.ca
Modern to Historic Image Matching: ORB/SURF an Effective Matching Technique Heider K. Ali Carleton University Department of Systems and Computer Eng. Ottawa, ON, K1S 5B8, CANADA heider@sce.carleton.ca
Computer Vision I - Appearance-based Matching and Projective Geometry
 Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
Computer Vision I - Appearance-based Matching and Projective Geometry Carsten Rother 05/11/2015 Computer Vision I: Image Formation Process Roadmap for next four lectures Computer Vision I: Image Formation
ARTVision Tracker 2D
 DAQRI ARToolKit 6/Open Source ARTVision Tracker 2D Natural Feature Tracking in ARToolKit6 Dan 2017-01 ARTVision 2D Background Core texture tracking algorithm for ARToolKit 6. Developed and contributed
DAQRI ARToolKit 6/Open Source ARTVision Tracker 2D Natural Feature Tracking in ARToolKit6 Dan 2017-01 ARTVision 2D Background Core texture tracking algorithm for ARToolKit 6. Developed and contributed
Yudistira Pictures; Universitas Brawijaya
 Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Evaluation of Feature Detector-Descriptor for Real Object Matching under Various Conditions of Ilumination and Affine Transformation Novanto Yudistira1, Achmad Ridok2, Moch Ali Fauzi3 1) Yudistira Pictures;
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
3D from Photographs: Automatic Matching of Images. Dr Francesco Banterle
 3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction