Image and Multidimensional Signal Processing
|
|
|
- Abel Conley
- 5 years ago
- Views:
Transcription

1 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science
2 Representation and Description 2
3 Representation and Description After segmenting an image to find regions of interest, we want to represent those regions in a concise form This can be used for Recognition Compression Further processing (e.g., joining, simplifying, tracking) Two main approaches Boundary based methods Region based methods 3

4 Boundary Representations We want a compact representation of the boundary of a binary region, to support recognition Methods: Chain codes Fourier descriptors 4
5 Boundary-based Representations Chain codes Follow the boundary around a region Record the direction of travel Yields a sequence of numbers that can be stored concisely, or used for recognition Problems Chain codes can be long Small disturbances in the boundary can cause large changes in the code Solution We can resample on a larger grid spacing 4-directional 8-directional 5
6 start Examples Resulting code: Resulting code: We can redefine the starting point so that the resulting sequence of numbers forms an integer of minimum magnitude 6
7 Relative Direction Can normalize for rotation by looking at the relative turning direction at each point Also the same as taking the first difference of the chain code 0: Go straight 1: turn left 3: turn right 7
![Fourier Descriptors Represent the boundary by a sequence of points (assume clockwise order) { (x 0,y 0 ), (x 1,y 1 ),, (x K-1,y K-1 ) } Write each point [x(k),y(k)] as a complex number s(k) = x(k) +](/docs-images/81/84351058/images/8-0.jpg "j y(k) Take 1D Fourier transform of s(k) to get coefficients a(u) K 1 a( u) s( k) e k0 j2 uk / K Fourier descriptors are a concise description of (object) contours Can be used for Contour processing")
8 Fourier Descriptors Represent the boundary by a sequence of points (assume clockwise order) { (x 0,y 0 ), (x 1,y 1 ),, (x K-1,y K-1 ) } Write each point [x(k),y(k)] as a complex number s(k) = x(k) + j y(k) Take 1D Fourier transform of s(k) to get coefficients a(u) K 1 a( u) s( k) e k0 j2 uk / K Fourier descriptors are a concise description of (object) contours Can be used for Contour processing (filtering, interpolation, morphing) Image analysis (characterizing and recognizing shapes) 8
9 Fourier Descriptors We have Fourier transform coefficients a(u) K 1 a( u) s( k) e k0 j2 uk / K Given coefficients, we can reconstruct boundary K 1 1 s( k) a( u) e K u0 j2 uk / K What is a(0)? Higher order coefficients can be truncated for a more concise representation (e.g., low pass filter) Other filters: Sharpening, edge extraction,... 9
10 Matlab Example First find boundary points (use bwtraceboundary) Take FFT, and truncate higher order coefficients Take inverse FFT, and plot resulting contour (Images from 10
11 clear all close all % Read in a silhouette image I = imread('tool088.gif'); imshow(i,[]); pause % Find a starting point on the boundary [rows cols] = find(i~=0); contour = bwtraceboundary(i, [rows(1), cols(1)], 'N'); % Subsample the boundary points so we have exactly 128, and put them into a % complex number format (x + jy) samplefactor = length(contour)/128; dist = 1; for i=1:128 c(i) = contour(round(dist),2) + j*contour(round(dist),1); dist = dist + samplefactor; end C = fft(c); % Chop out some of the smaller coefficients (less than umax) umax = 32; Capprox = C; for u=1:128 if u > umax && u < 128-umax Capprox(u) = 0; end end % Take inverse fft capprox = ifft(capprox); % Show original boundary and approximated boundary figure, imshow(imcomplement(bwperim(i))); Colorado hold on, School plot(capprox,'r'); of Mines 11
 Then the contour of a known")

12 Fourier descriptors for recognition Need to make Fourier descriptors invariant to common transformations (translation, changes in scale, rotation) Then the contour of a known object can be recognized irrespectively of its position, size and orientation Example application classify leaves From: Berlin University of Technology lecture on Fourier descriptors 12

13 Transformations Consider these transformations of the contour in the image plane Rotation, translation, scaling Shifting the starting point of the sequence These result in simple transformations of the Fourier transform Rotating the contour is equivalent to multiplying the Fourier transform by e jq Translating the contour just affects the 0 th coefficient Scaling the contour is equivalent to multiplying the Fourier transform by the same factor Changing the starting point of the sequence to point k is equivalent to multiplying the Fourier transform by e -j2ku/n 13
14 Transformations Can normalize a Fourier descriptor vector for rotation, translation, scaling, and starting point Set a(0) = 0 => puts centroid at the origin Set all a(u)=a(u)/ a(1) => normalize for scale Normalization with respect to rotation and starting point is a little more complicated, but can be done A simple way is to just discard the phase information and just take the magnitudes of the Fourier descriptors (i.e., the spectrum) This isn t the best way, though, because different shapes can have the same Fourier spectrum (Information loss, both shapes have the same amplitude spectrum) 14
15 Example Rotate and scale one of the images, compare the Fourier descriptors clear all close all I1 = imread('tool005.gif'); imshow(i1,[]); % Find a starting point on the boundary [rows cols] = find(i1~=0); Step 1: extract Fourier descriptors of first image, normalize for translation and scale contour = bwtraceboundary(i1, [rows(1), cols(1)], 'N'); % Subsample the boundary points so we have exactly 64, and put them into a % complex number format (x + jy) samplefactor = length(contour)/64; dist = 1; for i=1:64 c1(i) = contour(round(dist),2) + j*contour(round(dist),1); dist = dist + samplefactor; end C1 = fft(c1); C1(1) = 0; % Put centroid at the origin C1 = C1 / abs(c1(2)); % Normalize for scale 15
16 Example % Make rotated, scaled, and translated version scale = 1 + (0.5-rand); I2 = imresize(i1,scale); ang = 90*(0.5-rand); I2 = imrotate(i2, ang); figure, imshow(i2,[]); Step 2: extract Fourier descriptors of second image, normalize for translation and scale % Find a starting point on the boundary [rows cols] = find(i2~=0); contour = bwtraceboundary(i2, [rows(1), cols(1)], 'N'); % Subsample the boundary points so we have exactly 64, and put them into a % complex number format (x + jy) samplefactor = length(contour)/64; dist = 1; for i=1:64 c2(i) = contour(round(dist),2) + j*contour(round(dist),1); dist = dist + samplefactor; end C2 = fft(c2); C2(1) = 0; % Put centroid at the origin C2 = C2 / abs(c2(2)); % Normalize for scale 16
17 Example figure, plot(1:64, abs(c1), 1:64, abs(c2)); Step 3: compare the Fourier descriptors for the two images... since only the phases are different, the magnitudes should be the same Now try comparing the Fourier descriptors for two different images 17
18 Regional Representations Describe a segmented region using concise features Can use representation for recognition We have already looked at describing boundaries using Chain codes Fourier descriptors Now we look at describing the interior Statistical moments Texture measures 18
19 Statistical Moments The (p th,q th ) image moment is Note: p q mpq, x y f ( x, y) m 00 = area Centroid is: m x m m y m ( x, y) R ( ( x) f ( x, y) y) f ( x, y) f ( x, y) f ( x, y) R 19
20 Moments Central moments (subtract means) p, q x y p x y y x f ( x, y) q Normalized central moments (divide by area raised to a power) p, q where p, q 0,0 p q 2 1, for p q 2,3, 20
21 Principal Axes Major and minor axes are the eigenvectors of M Eigenvalues l 1,l 2 are the lengths ê 1 l l2 E e e e e ê 2 ME E Matlab s regionprops computes these 21
22 I = imread('tool088.gif'); [L,n] = bwlabel(i); stats = regionprops(l, 'all'); bb = stats(1).boundingbox; imshow(i, []); rectangle('position', bb, 'EdgeColor', 'g'); pause; See Matlab s regionprops cx = stats(1).centroid(1); cy = stats(1).centroid(2); major = stats(1).majoraxislength/2; minor = stats(1).minoraxislength/2; ang = -stats(1).orientation*pi/180; imshow(i, []); line([cx-major*cos(ang) cx+major*cos(ang)],... [cy-major*sin(ang) cy+major*sin(ang)], 'Color', 'g'); line([cx-minor*cos(ang+pi/2) cx+minor*cos(ang+pi/2)],... [cy-minor*sin(ang+pi/2) cy+minor*sin(ang+pi/2)], 'Color', 'y'); pause; cp = stats(1).convexhull; imshow(i, []); hold on; plot(cp(:,1), cp(:,2), 'g'); 22
23 Hu s Invariant Moments Combinations of moments are invariant to translation, scale, and rotation Can be used for recognition f 1 = η 20 + η 02 f 2 = (η 20 η 02 ) 2 + (2η 11 ) 2 f 3 = (η 30 3η 12 ) 2 + (3η 21 η 03 ) 2 f 4 = (η 30 + η 12 ) 2 + (η 21 + η 03 ) 2 f 5 = (η 30 3η 12 )(η 30 + η 12 )[(η 30 + η 12 ) 2 3(η 21 + η 03 ) 2 ] + (3η 21 η 03 )(η 21 + η 03 )[3(η 30 + η 12 ) 2 (η 21 + η 03 ) 2 ] f 6 = (η 20 η 02 )[(η 30 + η 12 ) 2 (η 21 + η 03 ) 2 ] + 4η 11 (η 30 + η 12 )(η 21 + η 03 ) f 7 = (3η 21 η 03 )(η 30 + η 12 )[(η 30 + η 12 ) 2 3(η 21 + η 03 ) 2 ] (η 30 3η 12 )(η 21 + η 03 )[3(η 30 + η 12 ) 2 (η 21 + η 03 ) 2 ]. 23
24 24

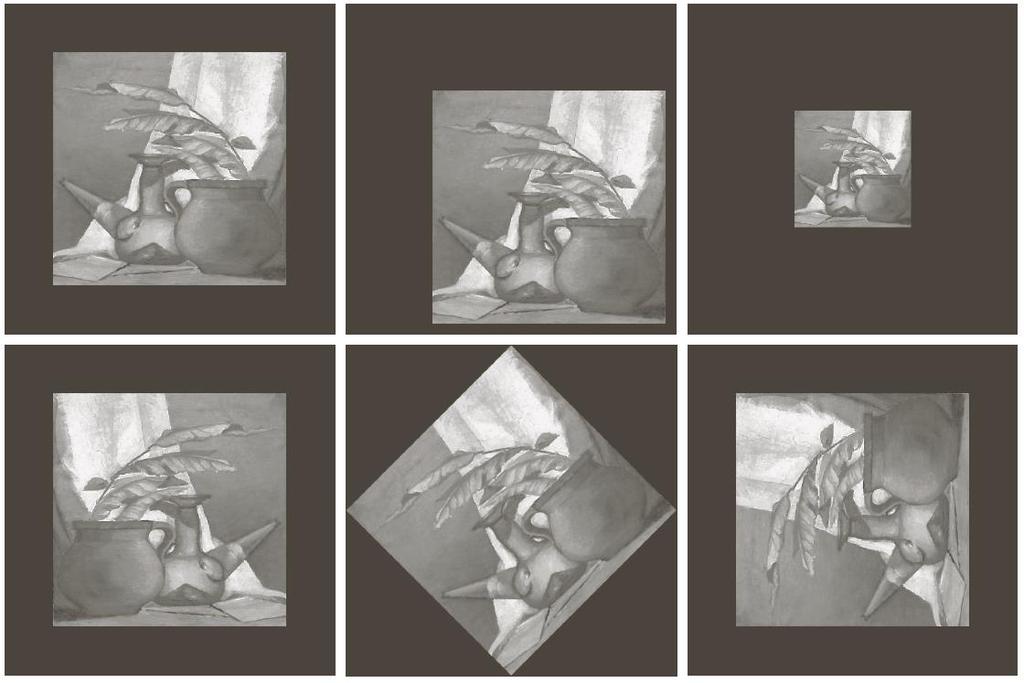
25 Texture Segment an image based on texture Example application: Autonomous road following 25

26 Texture Analysis Examples of texture Representations: Statistical, structural, spectral Images from the Brodatz photo album, commonly used for evaluating texture recognition algorithms 26
27 Statistical Descriptions of Texture Mean, variance, and higher order moments Derived values: R-value (is zero for uniform areas, 1 for areas with large variation) 1 R Uniformity U L 1 i 0 p 2 ( z i ) Entropy e L 1 i0 p( zi )log 2 p( z i ) 27
28 28

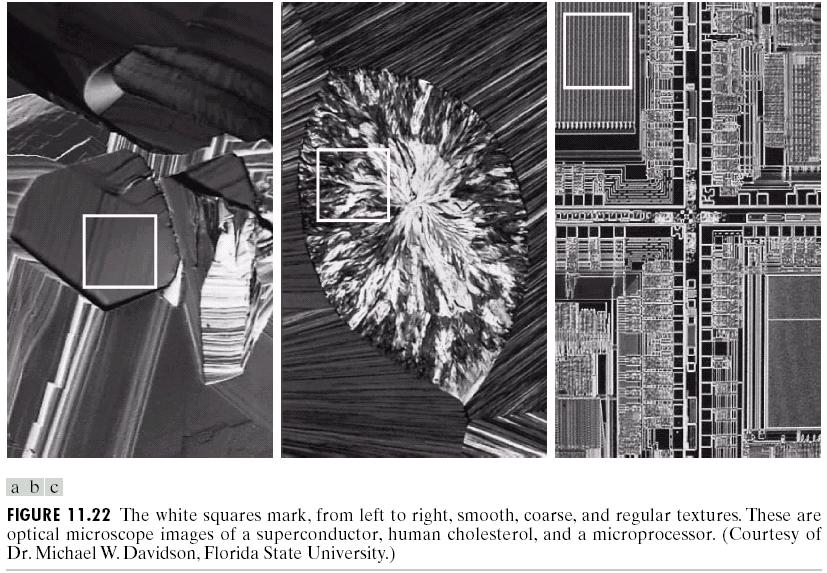
29 Example Statistical measures of smooth, coarse, and regular textures Notes: Third moment indicates skew of histogram to the left or right of the mean 29
30 Co-occurrence Matrices We consider not only the distribution of intensities, but also their relative positions Compute a 2D histogram of pixel pairs (a co-occurrence matrix), where H(a,b) = # occurrences of gray level a being at a certain relative location to gray level b a r,q b In general, H(a,b; r,q) 30
31 Example Let relationship = neighbor immediately to the right g ij = # times intensity j is to the right of i i j j i 31
32 Example Compute a co-occurrence matrix for the following image with gray levels 0,1,2 Consider a relative position of one pixel to the right and one pixel down image Co-occurrence matrix G 32




33 A highly correlated image will yield high values along the diagonal Co-occurrence matrices ( one pixel to the right ) 33
34 Interesting Results from Human Vision Experiments on what types of texture humans can discriminate pre-attentively (without cognitive processes) Julesz conjecture: Textures that have the same first and second order statistics are indistiguishable Statistics: First order statistics: measures of single points (mean, variance, density) Second order statistics: measure of pairs of points at different relative positions (co-occurrence values, co-variance) 34


35 Difference: size & firstorder statistics Difference: orientation & second-order statistics 35
36 identical second-order but different third- and higher-order statistics 36
37 Counter Examples Some textures with identical 1 st and 2 nd order statistics can be discriminated These involve conspicuous local features, called textons Our visual system can pre-attentively group these This is an example of structural texture representation 37


38 Texton features Color Terminator, number of end-of-lines. Ex. Closure, Connectivity Elongated blobs of different sizes. Ex. Granularity 38
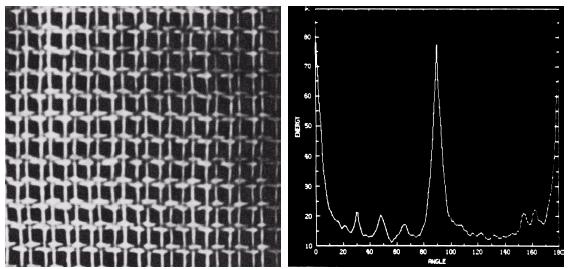
39 Spectral Approaches Sum energy in bins corresponding to ranges of spatial frequencies This can detect regular patterns or patterns at certain orientations 39


40 Example The periodic bursts of energy in both spectra are due to the periodic texture of the coarse background In this spectra, the main energy not associated with the background is along the horizontal axis, corresponding to the strong vertical edges in (b) 40
 ( q )")
41 S( r) S( q ) q 0 R 0 r1 S q S r ( r) ( q ) 41
 S(r)")
42 f(x,y) F(u,v) S(r) S(q) 42
43 S(q) 43
44 Summary / Questions Two methods to represent the boundary of a region are (1) chain codes, and (2) Fourier descriptors. Two methods to represent the region itself are (1) statistical moments, and (2) texture measures. What types of texture measures are there? 44
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Digital Image Processing. Lecture # 15 Image Segmentation & Texture
 Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Ulrik Söderström 21 Feb Representation and description
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Schedule for Rest of Semester
 Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Feature extraction. Bi-Histogram Binarization Entropy. What is texture Texture primitives. Filter banks 2D Fourier Transform Wavlet maxima points
 Feature extraction Bi-Histogram Binarization Entropy What is texture Texture primitives Filter banks 2D Fourier Transform Wavlet maxima points Edge detection Image gradient Mask operators Feature space
Feature extraction Bi-Histogram Binarization Entropy What is texture Texture primitives Filter banks 2D Fourier Transform Wavlet maxima points Edge detection Image gradient Mask operators Feature space
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT
 CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/05 TEXTURE ANALYSIS
 ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
FROM PIXELS TO REGIONS
 Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Anne Solberg
 INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 06 Image Structures 13/02/06 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 06 Image Structures 13/02/06 http://www.ee.unlv.edu/~b1morris/ecg782/
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Statistical Models for Shape and Appearance Note some material for these slides came from Algorithms
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Statistical Models for Shape and Appearance Note some material for these slides came from Algorithms
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Dietrich Paulus Joachim Hornegger. Pattern Recognition of Images and Speech in C++
 Dietrich Paulus Joachim Hornegger Pattern Recognition of Images and Speech in C++ To Dorothea, Belinda, and Dominik In the text we use the following names which are protected, trademarks owned by a company
Dietrich Paulus Joachim Hornegger Pattern Recognition of Images and Speech in C++ To Dorothea, Belinda, and Dominik In the text we use the following names which are protected, trademarks owned by a company
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
An Introduction to Content Based Image Retrieval
 CHAPTER -1 An Introduction to Content Based Image Retrieval 1.1 Introduction With the advancement in internet and multimedia technologies, a huge amount of multimedia data in the form of audio, video and
CHAPTER -1 An Introduction to Content Based Image Retrieval 1.1 Introduction With the advancement in internet and multimedia technologies, a huge amount of multimedia data in the form of audio, video and
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
Rotation and Scaling Image Using PCA
 wwwccsenetorg/cis Computer and Information Science Vol 5, No 1; January 12 Rotation and Scaling Image Using PCA Hawrra Hassan Abass Electrical & Electronics Dept, Engineering College Kerbela University,
wwwccsenetorg/cis Computer and Information Science Vol 5, No 1; January 12 Rotation and Scaling Image Using PCA Hawrra Hassan Abass Electrical & Electronics Dept, Engineering College Kerbela University,
CHAPTER 4 TEXTURE FEATURE EXTRACTION
 83 CHAPTER 4 TEXTURE FEATURE EXTRACTION This chapter deals with various feature extraction technique based on spatial, transform, edge and boundary, color, shape and texture features. A brief introduction
83 CHAPTER 4 TEXTURE FEATURE EXTRACTION This chapter deals with various feature extraction technique based on spatial, transform, edge and boundary, color, shape and texture features. A brief introduction
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System
 Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System Neetesh Prajapati M. Tech Scholar VNS college,bhopal Amit Kumar Nandanwar
Edge Histogram Descriptor, Geometric Moment and Sobel Edge Detector Combined Features Based Object Recognition and Retrieval System Neetesh Prajapati M. Tech Scholar VNS college,bhopal Amit Kumar Nandanwar
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010
 An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
Matrix Transformations The position of the corners of this triangle are described by the vectors: 0 1 ] 0 1 ] Transformation:
![Matrix Transformations The position of the corners of this triangle are described by the vectors: 0 1 ] 0 1 ] Transformation:](/thumbs/85/92538941.jpg "Matrix Transformations The position of the corners of this triangle are described by the vectors: 0 1 ] 0 1 ] Transformation:") Matrix Transformations The position of the corners of this triangle are described by the vectors: [ 2 1 ] & [4 1 ] & [3 3 ] Use each of the matrices below to transform these corners. In each case, draw
Matrix Transformations The position of the corners of this triangle are described by the vectors: [ 2 1 ] & [4 1 ] & [3 3 ] Use each of the matrices below to transform these corners. In each case, draw
Recognition, SVD, and PCA
 Recognition, SVD, and PCA Recognition Suppose you want to find a face in an image One possibility: look for something that looks sort of like a face (oval, dark band near top, dark band near bottom) Another
Recognition, SVD, and PCA Recognition Suppose you want to find a face in an image One possibility: look for something that looks sort of like a face (oval, dark band near top, dark band near bottom) Another
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Interpolation and Spatial Transformations 2 Image Interpolation
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Interpolation and Spatial Transformations 2 Image Interpolation
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Autoregressive and Random Field Texture Models
 1 Autoregressive and Random Field Texture Models Wei-Ta Chu 2008/11/6 Random Field 2 Think of a textured image as a 2D array of random numbers. The pixel intensity at each location is a random variable.
1 Autoregressive and Random Field Texture Models Wei-Ta Chu 2008/11/6 Random Field 2 Think of a textured image as a 2D array of random numbers. The pixel intensity at each location is a random variable.
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
CS4670: Computer Vision
 CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
CS4670: Computer Vision Noah Snavely Lecture 6: Feature matching and alignment Szeliski: Chapter 6.1 Reading Last time: Corners and blobs Scale-space blob detector: Example Feature descriptors We know
Examination in Image Processing
 Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
Umeå University, TFE Ulrik Söderström 203-03-27 Examination in Image Processing Time for examination: 4.00 20.00 Please try to extend the answers as much as possible. Do not answer in a single sentence.
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
1/12/2009. Image Elements (Pixels) Image Elements (Pixels) Digital Image. Digital Image =...
 Image Elements (Pixels) Digital Image. Digital Image =...") PAM3012 Digital Image Processing for Radiographers Image Sampling & Quantization In this lecture Definitions of Spatial l & Gray-level l resolution Perceived Image Quality & Resolution Aliasing & Moire
PAM3012 Digital Image Processing for Radiographers Image Sampling & Quantization In this lecture Definitions of Spatial l & Gray-level l resolution Perceived Image Quality & Resolution Aliasing & Moire
Wavelet-based Texture Classification of Tissues in Computed Tomography
 Wavelet-based Texture Classification of Tissues in Computed Tomography Lindsay Semler, Lucia Dettori, Jacob Furst Intelligent Multimedia Processing Laboratory School of Computer Science, Telecommunications,
Wavelet-based Texture Classification of Tissues in Computed Tomography Lindsay Semler, Lucia Dettori, Jacob Furst Intelligent Multimedia Processing Laboratory School of Computer Science, Telecommunications,
Computer vision: models, learning and inference. Chapter 13 Image preprocessing and feature extraction
 Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Computer vision: models, learning and inference Chapter 13 Image preprocessing and feature extraction Preprocessing The goal of pre-processing is to try to reduce unwanted variation in image due to lighting,
Image pyramids and their applications Bill Freeman and Fredo Durand Feb. 28, 2006
 Image pyramids and their applications 6.882 Bill Freeman and Fredo Durand Feb. 28, 2006 Image pyramids Gaussian Laplacian Wavelet/QMF Steerable pyramid http://www-bcs.mit.edu/people/adelson/pub_pdfs/pyramid83.pdf
Image pyramids and their applications 6.882 Bill Freeman and Fredo Durand Feb. 28, 2006 Image pyramids Gaussian Laplacian Wavelet/QMF Steerable pyramid http://www-bcs.mit.edu/people/adelson/pub_pdfs/pyramid83.pdf
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
A Study on Feature Extraction Techniques in Image Processing
 International Journal of Computer Sciences and Engineering Open Access Review Paper Volume-4, Special Issue-7, Dec 2016 ISSN: 2347-2693 A Study on Feature Extraction Techniques in Image Processing Shrabani
International Journal of Computer Sciences and Engineering Open Access Review Paper Volume-4, Special Issue-7, Dec 2016 ISSN: 2347-2693 A Study on Feature Extraction Techniques in Image Processing Shrabani
5. Feature Extraction from Images
 5. Feature Extraction from Images Aim of this Chapter: Learn the Basic Feature Extraction Methods for Images Main features: Color Texture Edges Wie funktioniert ein Mustererkennungssystem Test Data x i
5. Feature Extraction from Images Aim of this Chapter: Learn the Basic Feature Extraction Methods for Images Main features: Color Texture Edges Wie funktioniert ein Mustererkennungssystem Test Data x i
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
Analysis of Binary Images
 Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition)
") Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition) Outline Measuring frequencies in images: Definitions, properties Sampling issues Relation with Gaussian
Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition) Outline Measuring frequencies in images: Definitions, properties Sampling issues Relation with Gaussian
TEXTURE. Plan for today. Segmentation problems. What is segmentation? INF 4300 Digital Image Analysis. Why texture, and what is it?
 INF 43 Digital Image Analysis TEXTURE Plan for today Why texture, and what is it? Statistical descriptors First order Second order Gray level co-occurrence matrices Fritz Albregtsen 8.9.21 Higher order
INF 43 Digital Image Analysis TEXTURE Plan for today Why texture, and what is it? Statistical descriptors First order Second order Gray level co-occurrence matrices Fritz Albregtsen 8.9.21 Higher order
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Binary Image Processing Examples 2 Example Label connected components 1 1 1 1 1 assuming 4 connected
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Binary Image Processing Examples 2 Example Label connected components 1 1 1 1 1 assuming 4 connected
Computer Vision: 4. Filtering. By I-Chen Lin Dept. of CS, National Chiao Tung University
 Computer Vision: 4. Filtering By I-Chen Lin Dept. of CS, National Chiao Tung University Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth and Jean Ponce,
Computer Vision: 4. Filtering By I-Chen Lin Dept. of CS, National Chiao Tung University Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth and Jean Ponce,
Filtering. -If we denote the original image as f(x,y), then the noisy image can be denoted as f(x,y)+n(x,y) where n(x,y) is a cosine function.
, then the noisy image can be denoted as f(x,y)+n(x,y) where n(x,y) is a cosine function.") Filtering -The image shown below has been generated by adding some noise in the form of a cosine function. -If we denote the original image as f(x,y), then the noisy image can be denoted as f(x,y)+n(x,y)
Filtering -The image shown below has been generated by adding some noise in the form of a cosine function. -If we denote the original image as f(x,y), then the noisy image can be denoted as f(x,y)+n(x,y)
APPM 2360 Project 2 Due Nov. 3 at 5:00 PM in D2L
 APPM 2360 Project 2 Due Nov. 3 at 5:00 PM in D2L 1 Introduction Digital images are stored as matrices of pixels. For color images, the matrix contains an ordered triple giving the RGB color values at each
APPM 2360 Project 2 Due Nov. 3 at 5:00 PM in D2L 1 Introduction Digital images are stored as matrices of pixels. For color images, the matrix contains an ordered triple giving the RGB color values at each
FOURIER TRANSFORM GABOR FILTERS. and some textons
 FOURIER TRANSFORM GABOR FILTERS and some textons Thank you for the slides. They come mostly from the following sources Alexei Efros CMU Martial Hebert CMU Image sub-sampling 1/8 1/4 Throw away every other
FOURIER TRANSFORM GABOR FILTERS and some textons Thank you for the slides. They come mostly from the following sources Alexei Efros CMU Martial Hebert CMU Image sub-sampling 1/8 1/4 Throw away every other
Image Transformation Techniques Dr. Rajeev Srivastava Dept. of Computer Engineering, ITBHU, Varanasi
 Image Transformation Techniques Dr. Rajeev Srivastava Dept. of Computer Engineering, ITBHU, Varanasi 1. Introduction The choice of a particular transform in a given application depends on the amount of
Image Transformation Techniques Dr. Rajeev Srivastava Dept. of Computer Engineering, ITBHU, Varanasi 1. Introduction The choice of a particular transform in a given application depends on the amount of
Chapter - 2 : IMAGE ENHANCEMENT
 Chapter - : IMAGE ENHANCEMENT The principal objective of enhancement technique is to process a given image so that the result is more suitable than the original image for a specific application Image Enhancement
Chapter - : IMAGE ENHANCEMENT The principal objective of enhancement technique is to process a given image so that the result is more suitable than the original image for a specific application Image Enhancement
Announcements. Binary Image Processing. Binary System Summary. Histogram-based Segmentation. How do we select a Threshold?
 Announcements Binary Image Processing Homework is due Apr 24, :59 PM Homework 2 will be assigned this week Reading: Chapter 3 Image processing CSE 52 Lecture 8 Binary System Summary. Acquire images and
Announcements Binary Image Processing Homework is due Apr 24, :59 PM Homework 2 will be assigned this week Reading: Chapter 3 Image processing CSE 52 Lecture 8 Binary System Summary. Acquire images and
Texture Analysis. Selim Aksoy Department of Computer Engineering Bilkent University
 Texture Analysis Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Texture An important approach to image description is to quantify its texture content. Texture
Texture Analysis Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Texture An important approach to image description is to quantify its texture content. Texture
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
CSE 152 Lecture 7. Intro Computer Vision
 Introduction to Computer Vision CSE 152 Lecture 7 Binary Tracking for Robot Control Binary System Summary 1. Acquire images and binarize (tresholding, color labels, etc.). 2. Possibly clean up image using
Introduction to Computer Vision CSE 152 Lecture 7 Binary Tracking for Robot Control Binary System Summary 1. Acquire images and binarize (tresholding, color labels, etc.). 2. Possibly clean up image using
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
Texture. Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image.
 Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Texture Texture is a description of the spatial arrangement of color or intensities in an image or a selected region of an image. Structural approach: a set of texels in some regular or repeated pattern
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Introduction to Digital Image Processing
 Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Chamfer matching. More on template matching. Distance transform example. Computing the distance transform. Shape based matching.
 Chamfer matching Given: binary image, B, of edge and local feature locations binary edge template, T, of shape we want to match More on template matching Shape based matching Let D be an array in registration
Chamfer matching Given: binary image, B, of edge and local feature locations binary edge template, T, of shape we want to match More on template matching Shape based matching Let D be an array in registration
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Analysis of Planar Anisotropy of Fibre Systems by Using 2D Fourier Transform
 Maroš Tunák, Aleš Linka Technical University in Liberec Faculty of Textile Engineering Department of Textile Materials Studentská 2, 461 17 Liberec 1, Czech Republic E-mail: maros.tunak@tul.cz ales.linka@tul.cz
Maroš Tunák, Aleš Linka Technical University in Liberec Faculty of Textile Engineering Department of Textile Materials Studentská 2, 461 17 Liberec 1, Czech Republic E-mail: maros.tunak@tul.cz ales.linka@tul.cz
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
An Accurate Method for Skew Determination in Document Images
 DICTA00: Digital Image Computing Techniques and Applications, 1 January 00, Melbourne, Australia. An Accurate Method for Skew Determination in Document Images S. Lowther, V. Chandran and S. Sridharan Research
DICTA00: Digital Image Computing Techniques and Applications, 1 January 00, Melbourne, Australia. An Accurate Method for Skew Determination in Document Images S. Lowther, V. Chandran and S. Sridharan Research
MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION OF TEXTURES
 International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 125-130 MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION
International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 125-130 MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION
Segmentation Computer Vision Spring 2018, Lecture 27
 Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have