human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC
|
|
|
- Jordan Cook
- 5 years ago
- Views:
Transcription
1 COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to: David Lowe, David Forsyth, Christopher Rasmussen
2 Segmentation by Clustering Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together (form clusters)

3 Segmentation by Clustering

4 Segmentation by Clustering


5 Segmentation by Clustering From: Object Recognition as Machine Translation, Duygulu, Barnard, de Freitas, Forsyth, ECCV02
6 General ideas Tokens whatever we need to group (pixels, points, surface elements, etc., etc.) Bottom up segmentation tokens belong together because they are locally coherent Top down segmentation tokens belong together because they lie on the same object These two are not mutually exclusive
7 What is Segmentation? Clustering image elements that belong together Partitioning Divide into regions/sequences with coherent internal properties Grouping Identify sets of coherent tokens in image Tokens: Whatever we need to group Pixels Features (corners, lines, etc.) Larger regions with uniform colour or texture Discrete objects (e.g., people in a crowd) Etc. Slide credit: Christopher Rasmussen
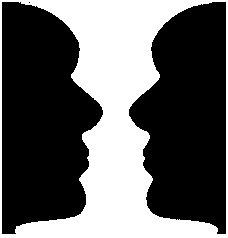
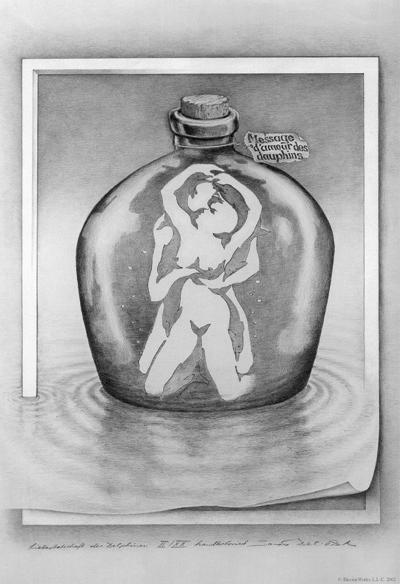
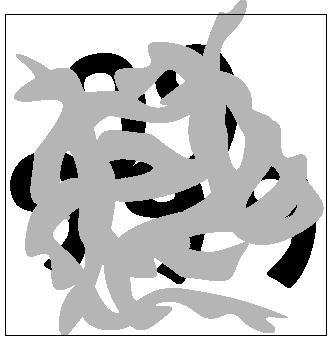
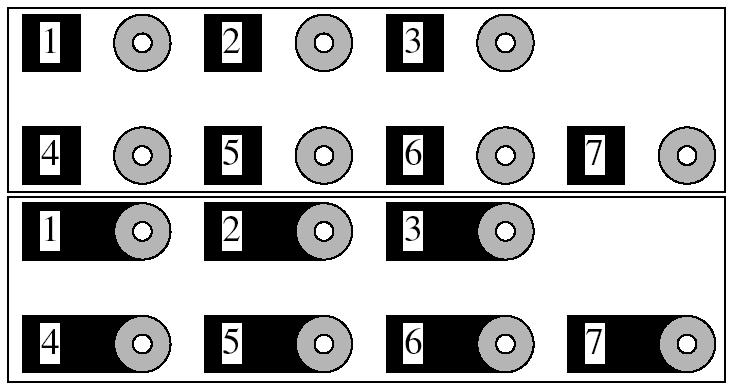
8 Why do these tokens belong together?
9
10

11
12
13 Basic ideas of grouping in human vision Figure-ground discrimination grouping can be seen in terms of allocating some elements to a figure, some to ground Can be based on local bottom-up cues or high level recognition Gestalt properties elements in a collection of elements can have properties that result from relationships (Muller-Lyer effect) A series of factors affect whether elements should be grouped together Gestalt factors
14
15
16
17
18
19
20
21




22 Application: Background Subtraction The problem: Segment moving foreground objects from static background from C. Stauffer and W. Grimson Current image Background image Foreground pixels Applications Traffic monitoring Surveillance/security User interaction courtesy of C. Wren Pfinder Slide credit: Christopher Rasmussen
23 Technique: Background Subtraction If we know what the background looks like, it is easy to identify interesting bits Applications Person in an office Tracking cars on a road surveillance Approach: use a moving average to estimate background image subtract from current frame large absolute values are interesting pixels trick: use morphological operations to clean up pixels
24 Algorithm video sequence frame difference background thresholded frame diff for t = 1:N Update background model Compute frame difference Threshold frame difference Noise removal end Objects are detected where is non-zero
25 Background Modelling Offline average Pixel-wise mean values are computed during training phase (also called Mean and Threshold) Adjacent Frame Difference Each image is subtracted from previous image in sequence Moving average Background model is linear weighted sum of previous frames Multi-Modal Background model is Gaussian mixture model learnt from training data

26 from K. Toyama et al. Results & Problems for Simple Approaches

27

28
29 Background Subtraction: Issues Noise models Unimodal: Pixel values vary over time even for static scenes Multimodal: Features in background can oscillate, requiring models which can represent disjoint sets of pixel values (e.g., waving trees against sky) Gross illumination changes Continuous: Gradual illumination changes alter the appearance of the background (e.g., time of day) Discontinuous: Sudden changes in illumination and other scene parameters alter the appearance of the background (e.g., flipping a light switch) Bootstrapping Is a training phase with no foreground necessary, or can the system learn what s static vs. dynamic online? Slide credit: Christopher Rasmussen
30 Technique: Shot Boundary Detection Find the shots in a sequence of video shot boundaries usually result in big differences between succeeding frames Strategy: compute interframe distances declare a boundary where these are big Possible distances frame differences histogram differences block comparisons edge differences Applications: representation for movies, or video sequences find shot boundaries obtain most representative frame supports search
31 Segmentation as clustering Cluster together (pixels, tokens, etc.) that belong together Agglomerative clustering attach closest to cluster it is closest to repeat Divisive clustering split cluster along best boundary Repeat Dendrograms yield a picture of output as clustering process continues
32 Feature Space Every token is identified by a set of salient visual characteristics called features. For example: Position Color Texture Motion vector Size, orientation (if token is larger than a pixel) The choice of features and how they are quantified implies a feature space in which each token is represented by a point Token similarity is thus measured by distance between points ( feature vectors ) in feature space Slide credit: Christopher Rasmussen
33
34 Matlab Code rand('seed',12); X = rand(100,2); Y = pdist(x, euclidean'); Z = linkage(y, single'); [H, T] = dendrogram(z);
35
36
37
38
39
40

41

42
43
44 K-Means Clustering Initialization: Given K categories, N points in feature space. Pick K points randomly; these are initial cluster centers (means) m 1,, m K. Repeat the following: 1. Assign each of the N points, x j, to clusters by nearest m i (make sure no cluster is empty) 2. Recompute mean m i of each cluster from its member points 3. If no mean has changed more than some ε, stop Effectively carries out gradient descent to minimize: i clusters j elements of i'th cluster x j μ i 2 Slide credit: Christopher Rasmussen
45 Example: 3-means Clustering Convergence in 3 steps from Duda et al.
46
47
48
49

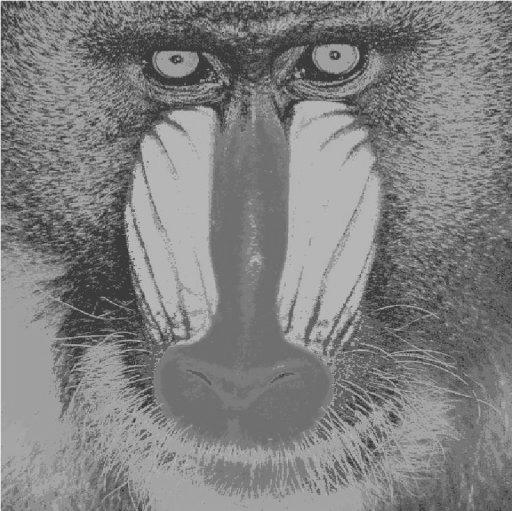
50 Image Clusters on intensity Clusters on color K-means clustering using intensity alone and color alone
51 K-Means
52 EM
53 Compare K-means VS EM K-means EM
54 Graph theoretic clustering
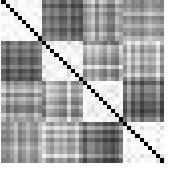
55 Graph theoretic clustering Sometimes, clusters have unusual shapes and K- means fails. Alternative approach: encode similarity of tokens instead of absolute properties Represent similarity of tokens using a weighted graph/affinity matrix Cut up this graph to get subgraphs with strong interior links
56 Graph theoretic clustering
57
58 Measuring Affinity Intensity Distance aff ( x, y)= exp 1 2 2σ i I x ( () Iy ) ()2 aff ( x, y)= exp 1 2 2σ d x y 2 ( ) Texture aff ( x, y)= exp 1 2 2σ t cx ( () cy ) ()2

59 Scale affects affinity
60 Eigenvectors and Segmentation Extract a single good cluster Where elements have high affinity values with each other

61 Example eigenvector points eigenvector matrix
62 Eigenvectors and Segmentation Extract a single good cluster Extract weights for a set of clusters


63
64



65
66 Normalized cuts Current criterion evaluates within cluster similarity, but not across cluster difference Minimize Instead, we d like to maximize the within cluster similarity compared to the across cluster difference (or equivalently) Maximize Write graph as V, one cluster as A and the other as B i.e. construct A, B such that their within cluster similarity is high compared to their association with the rest of the graph
67 Normalized cuts Write a vector y whose elements are 1 if item is in A, -b if it s in B Write the matrix of the graph as W, and the matrix which has the row sums of W on its diagonal as D, 1 is the vector with all ones. Criterion becomes This is hard to do, because y s values are quantized y T ( D W )y min y y T Dy and we have a constraint y T D1 = 0
68 Normalized cuts
69 Normalized cuts Instead, solve the generalized eigenvalue problem which gives max ( y y T ( D W )y) subject to ( y T Dy = 1) ( D W )y = λdy Now look for a quantization threshold that maximises the criterion --- i.e all components of y above that threshold go to one, all below go to -b
70 More than two segments Two options Recursively split each side to get a tree, continuing till the eigenvalues are too small Use the other eigenvectors
71 Normalized cuts: Summary
72 Normalized cuts: Results

73 Normalized cuts: Results

74 Figure from Image and video segmentation: the normalised cut framework, by Shi and Malik, copyright IEEE, 1998

75 F igure from Normalized cuts and image segmentation, Shi and Malik, copyright IEEE, 2000

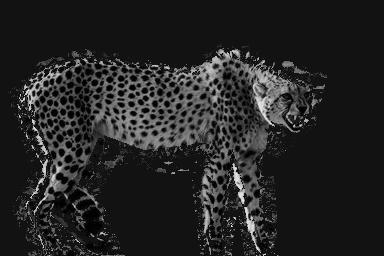
76 Application: Supervised Segmentation I
77 Gaussian Colour Distributions Data in Colour Space Gaussian Models


78 Gaussian Colour Distributions
79 Application: Supervised Segmentation II
80 Mixture of Gaussian Colour Distributions Data in Colour Space Mixture of Gaussian Models


81 Mixture of Gaussian Colour Distributions

82 Colour is not always sufficient
83 Colour is not always sufficient Data in Colour Space Mixture of Gaussian Models


84 Texture = Colour in context Independent pixel assumption fails when foreground and background share colours Need to look at context? Over what area should we look?

85 Markov Random Fields Markov Random Fields (MRFs) express spatial dependence in terms of neighbours BUT this does not mean that non-neighbours are independent!


86 Example: Markov Random Fields A. Blake, C. Rother, M. Brown, P. Perez and P. Torr. Interactive image segmentation using an adaptive Gaussian Mixture MRF model. ECCV2004
87 Fitting a Model to Data Reading: 15.1, Cluster image parts together by fitting a model to some selected parts Examples: A line fits well to a set of points. This is unlikely to be due to chance, so we represent the points as a line. A 3D model can be rotated and translated to closely fit a set of points or line segments. It it fits well, the object is recognized.
88 Line Grouping Problem Slide credit: David Jacobs
89 This is difficult because of: Extraneous data: clutter or multiple models We do not know what is part of the model? Can we pull out models with a few parts from much larger amounts of background clutter? Missing data: only some parts of model are present Noise Cost: It is not feasible to check all combinations of features by fitting a model to each possible subset
90 The Hough Transform for Lines Idea: Each point votes for the lines that pass through it. A line is the set of points (x, y) such that ( sinθ)x + ( cosθ)y + d = 0 Different choices of θ, d give different lines For any (x, y) there is a one parameter family of lines through this point. Just let (x,y) be constants and for each value of θ the value of d will be determined. Each point enters votes for each line in the family If there is a line that has lots of votes, that will be the line passing near the points that voted for it.
91 tokens Votes Horizontal axis is θ, vertical is d.

92 tokens votes

93
94 Fewer votes land in a single bin when noise increases.
95 Adding more clutter increases number of bins with false peaks.
96 Mechanics of the Hough transform Construct an array representing θ, d For each point, render the curve (θ, d) into this array, adding one vote at each cell Difficulties how big should the cells be? (too big, and we merge quite different lines; too small, and noise causes lines to be missed) How many lines? Count the peaks in the Hough array Treat adjacent peaks as a single peak Which points belong to each line? Search for points close to the line Solve again for line and iterate
97 More details on Hough transform It is best to vote for the two closest bins in each dimension, as the locations of the bin boundaries is arbitrary. By bin we mean an array location in which votes are accumulated This means that peaks are blurred and noise will not cause similar votes to fall into separate bins Can use a hash table rather than an array to store the votes This means that no effort is wasted on initializing and checking empty bins It avoids the need to predict the maximum size of the array, which can be non-rectangular
98 When is the Hough transform useful? The textbook wrongly implies that it is useful mostly for finding lines In fact, it can be very effective for recognizing arbitrary shapes or objects The key to efficiency is to have each feature (token) determine as many parameters as possible For example, lines can be detected much more efficiently from small edge elements (or points with local gradients) than from just points For object recognition, each token should predict scale, orientation, and location (4D array) Bottom line: The Hough transform can extract feature groupings from clutter in linear time!
99 RANSAC (RANdom SAmple Consensus) 1. Randomly choose minimal subset of data points necessary to fit model (a sample) 2. Points within some distance threshold t of model are a consensus set. Size of consensus set is model s support 3. Repeat for N samples; model with biggest support is most robust fit Points within distance t of best model are inliers Fit final model to all inliers Two samples and their supports for line-fitting from Hartley & Zisserman Slide: Christopher Rasmussen
100
101 RANSAC: How many samples? How many samples are needed? Suppose w is fraction of inliers (points from line). n points needed to define hypothesis (2 for lines) k number of samples. Probability that a single sample of n points is correct: n w Probability that all samples fail is: ( 1 n k w ) Choose k high enough to keep this below desired failure rate.
102 RANSAC: Computed k (p = 0.99) Sample size Proportion of outliers n 5% 10% 20% 25% 30% 40% 50% adapted from Hartley & Zisserman Slide credit: Christopher Rasmussen
103 After RANSAC RANSAC divides data into inliers and outliers and yields estimate computed from minimal set of inliers Improve this initial estimate with estimation over all inliers (e.g., with standard least-squares minimization) But this may change inliers, so alternate fitting with reclassification as inlier/outlier from Hartley & Zisserman Slide credit: Christopher Rasmussen
104 Discussion of RANSAC Advantages: General method suited for a wide range of model fitting problems Easy to implement and easy to calculate its failure rate Disadvantages: Only handles a moderate percentage of outliers without cost blowing up Many real problems have high rate of outliers (but sometimes selective choice of random subsets can help) The Hough transform can handle high percentage of outliers
Segmentation by Clustering Reading: Chapter 14 (skip 14.5)
") Segmentation by Clustering Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together
Segmentation by Clustering Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together
Segmentation by Clustering. Segmentation by Clustering Reading: Chapter 14 (skip 14.5) General ideas
 General ideas") Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together (form clusters) Frame differencing
Reading: Chapter 14 (skip 14.5) Data reduction - obtain a compact representation for interesting image data in terms of a set of components Find components that belong together (form clusters) Frame differencing
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
Segmentation & Clustering
 EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
Segmentation by Clustering
 KECE471 Computer Vision Segmentation by Clustering Chang-Su Kim Chapter 14, Computer Vision by Forsyth and Ponce Note: Dr. Forsyth s notes are partly used. Jae-Kyun Ahn in Korea University made the first
KECE471 Computer Vision Segmentation by Clustering Chang-Su Kim Chapter 14, Computer Vision by Forsyth and Ponce Note: Dr. Forsyth s notes are partly used. Jae-Kyun Ahn in Korea University made the first
Segmentation and low-level grouping.
 Segmentation and low-level grouping. Bill Freeman, MIT 6.869 April 14, 2005 Readings: Mean shift paper and background segmentation paper. Mean shift IEEE PAMI paper by Comanici and Meer, http://www.caip.rutgers.edu/~comanici/papers/msrobustapproach.pdf
Segmentation and low-level grouping. Bill Freeman, MIT 6.869 April 14, 2005 Readings: Mean shift paper and background segmentation paper. Mean shift IEEE PAMI paper by Comanici and Meer, http://www.caip.rutgers.edu/~comanici/papers/msrobustapproach.pdf
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Image Segmentation continued Graph Based Methods
 Image Segmentation continued Graph Based Methods Previously Images as graphs Fully-connected graph node (vertex) for every pixel link between every pair of pixels, p,q affinity weight w pq for each link
Image Segmentation continued Graph Based Methods Previously Images as graphs Fully-connected graph node (vertex) for every pixel link between every pair of pixels, p,q affinity weight w pq for each link
Image Segmentation continued Graph Based Methods. Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book
 Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
Image Segmentation continued Graph Based Methods Some slides: courtesy of O. Capms, Penn State, J.Ponce and D. Fortsyth, Computer Vision Book Previously Binary segmentation Segmentation by thresholding
CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation
 CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation II - 1 Outlines What is Graph cuts Graph-based clustering
CS 534: Computer Vision Segmentation II Graph Cuts and Image Segmentation Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation II - 1 Outlines What is Graph cuts Graph-based clustering
EE 701 ROBOT VISION. Segmentation
 EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
EE 701 ROBOT VISION Regions and Image Segmentation Histogram-based Segmentation Automatic Thresholding K-means Clustering Spatial Coherence Merging and Splitting Graph Theoretic Segmentation Region Growing
Targil 12 : Image Segmentation. Image segmentation. Why do we need it? Image segmentation
 Targil : Image Segmentation Image segmentation Many slides from Steve Seitz Segment region of the image which: elongs to a single object. Looks uniform (gray levels, color ) Have the same attributes (texture
Targil : Image Segmentation Image segmentation Many slides from Steve Seitz Segment region of the image which: elongs to a single object. Looks uniform (gray levels, color ) Have the same attributes (texture
Content-based Image and Video Retrieval. Image Segmentation
 Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
Content-based Image and Video Retrieval Vorlesung, SS 2011 Image Segmentation 2.5.2011 / 9.5.2011 Image Segmentation One of the key problem in computer vision Identification of homogenous region in the
Lecture 16 Segmentation and Scene understanding
 Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Lecture 16 Segmentation and Scene understanding Introduction! Mean-shift! Graph-based segmentation! Top-down segmentation! Silvio Savarese Lecture 15 -! 3-Mar-14 Segmentation Silvio Savarese Lecture 15
Segmentation (continued)
") Segmentation (continued) Lecture 05 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr Mubarak Shah Professor, University of Central Florida The Robotics
Segmentation (continued) Lecture 05 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr Mubarak Shah Professor, University of Central Florida The Robotics
Lecture 7: Segmentation. Thursday, Sept 20
 Lecture 7: Segmentation Thursday, Sept 20 Outline Why segmentation? Gestalt properties, fun illusions and/or revealing examples Clustering Hierarchical K-means Mean Shift Graph-theoretic Normalized cuts
Lecture 7: Segmentation Thursday, Sept 20 Outline Why segmentation? Gestalt properties, fun illusions and/or revealing examples Clustering Hierarchical K-means Mean Shift Graph-theoretic Normalized cuts
Computer Vision 6 Segmentation by Fitting
 Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Segmentation. Bottom Up Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Bottom Up Segmentation 1 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping
Segmentation Bottom up Segmentation Semantic Segmentation Bottom Up Segmentation 1 Segmentation as clustering Depending on what we choose as the feature space, we can group pixels in different ways. Grouping
CPSC 425: Computer Vision
 1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
The goals of segmentation
 Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Computer Vision 5 Segmentation by Clustering
 Computer Vision 5 Segmentation by Clustering MAP-I Doctoral Programme Miguel Tavares Coimbra Outline Introduction Applications Simple clustering K-means clustering Graph-theoretic clustering Acknowledgements:
Computer Vision 5 Segmentation by Clustering MAP-I Doctoral Programme Miguel Tavares Coimbra Outline Introduction Applications Simple clustering K-means clustering Graph-theoretic clustering Acknowledgements:
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 11 Segmentation And Clustering Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 11 Segmentation And Clustering Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Applications. Foreground / background segmentation Finding skin-colored regions. Finding the moving objects. Intelligent scissors
 Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Lecture 11: E-M and MeanShift. CAP 5415 Fall 2007
 Lecture 11: E-M and MeanShift CAP 5415 Fall 2007 Review on Segmentation by Clustering Each Pixel Data Vector Example (From Comanciu and Meer) Review of k-means Let's find three clusters in this data These
Lecture 11: E-M and MeanShift CAP 5415 Fall 2007 Review on Segmentation by Clustering Each Pixel Data Vector Example (From Comanciu and Meer) Review of k-means Let's find three clusters in this data These
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Image Analysis - Lecture 5
 Texture Segmentation Clustering Review Image Analysis - Lecture 5 Texture and Segmentation Magnus Oskarsson Lecture 5 Texture Segmentation Clustering Review Contents Texture Textons Filter Banks Gabor
Texture Segmentation Clustering Review Image Analysis - Lecture 5 Texture and Segmentation Magnus Oskarsson Lecture 5 Texture Segmentation Clustering Review Contents Texture Textons Filter Banks Gabor
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Outline. Segmentation & Grouping. Examples of grouping in vision. Grouping in vision. Grouping in vision 2/9/2011. CS 376 Lecture 7 Segmentation 1
 Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Segmentation and Grouping
 CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
CS 1699: Intro to Computer Vision Segmentation and Grouping Prof. Adriana Kovashka University of Pittsburgh September 24, 2015 Goals: Grouping in vision Gather features that belong together Obtain an intermediate
Announcements. Image Segmentation. From images to objects. Extracting objects. Status reports next Thursday ~5min presentations in class
 Image Segmentation Announcements Status reports next Thursday ~5min presentations in class Project voting From Sandlot Science Today s Readings Forsyth & Ponce, Chapter 1 (plus lots of optional references
Image Segmentation Announcements Status reports next Thursday ~5min presentations in class Project voting From Sandlot Science Today s Readings Forsyth & Ponce, Chapter 1 (plus lots of optional references
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Unit 3 : Image Segmentation
 Unit 3 : Image Segmentation K-means Clustering Mean Shift Segmentation Active Contour Models Snakes Normalized Cut Segmentation CS 6550 0 Histogram-based segmentation Goal Break the image into K regions
Unit 3 : Image Segmentation K-means Clustering Mean Shift Segmentation Active Contour Models Snakes Normalized Cut Segmentation CS 6550 0 Histogram-based segmentation Goal Break the image into K regions
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Unsupervised Learning and Clustering
 Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2009 CS 551, Spring 2009 c 2009, Selim Aksoy (Bilkent University)
Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2009 CS 551, Spring 2009 c 2009, Selim Aksoy (Bilkent University)
Grouping and Segmentation
 Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Grouping and Segmentation CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Kristen Grauman ) Goals: Grouping in vision Gather features that belong together Obtain an intermediate representation
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Segmentation Computer Vision Spring 2018, Lecture 27
 Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
Segmentation http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 218, Lecture 27 Course announcements Homework 7 is due on Sunday 6 th. - Any questions about homework 7? - How many of you have
In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together.
 In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together. We will first define the segmentation problem, overview some basic ideas of
In this lecture, we are going to talk about image segmentation, essentially defined as methods for grouping pixels together. We will first define the segmentation problem, overview some basic ideas of
Pattern Recognition. Kjell Elenius. Speech, Music and Hearing KTH. March 29, 2007 Speech recognition
 Pattern Recognition Kjell Elenius Speech, Music and Hearing KTH March 29, 2007 Speech recognition 2007 1 Ch 4. Pattern Recognition 1(3) Bayes Decision Theory Minimum-Error-Rate Decision Rules Discriminant
Pattern Recognition Kjell Elenius Speech, Music and Hearing KTH March 29, 2007 Speech recognition 2007 1 Ch 4. Pattern Recognition 1(3) Bayes Decision Theory Minimum-Error-Rate Decision Rules Discriminant
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Fitting. Lecture 8. Cristian Sminchisescu. Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce
 Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid,
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Image Analysis Lecture Segmentation. Idar Dyrdal
 Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Image Analysis Lecture 9.1 - Segmentation Idar Dyrdal Segmentation Image segmentation is the process of partitioning a digital image into multiple parts The goal is to divide the image into meaningful
Template Matching Rigid Motion. Find transformation to align two images. Focus on geometric features
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Template Matching Rigid Motion
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Segmentation and Grouping April 21 st, 2015
 Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Part 3: Image Processing
 Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Unsupervised Learning and Clustering
 Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2008 CS 551, Spring 2008 c 2008, Selim Aksoy (Bilkent University)
Unsupervised Learning and Clustering Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2008 CS 551, Spring 2008 c 2008, Selim Aksoy (Bilkent University)
Image Segmentation. Shengnan Wang
 Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Image Segmentation Shengnan Wang shengnan@cs.wisc.edu Contents I. Introduction to Segmentation II. Mean Shift Theory 1. What is Mean Shift? 2. Density Estimation Methods 3. Deriving the Mean Shift 4. Mean
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Clustering. CS294 Practical Machine Learning Junming Yin 10/09/06
 Clustering CS294 Practical Machine Learning Junming Yin 10/09/06 Outline Introduction Unsupervised learning What is clustering? Application Dissimilarity (similarity) of objects Clustering algorithm K-means,
Clustering CS294 Practical Machine Learning Junming Yin 10/09/06 Outline Introduction Unsupervised learning What is clustering? Application Dissimilarity (similarity) of objects Clustering algorithm K-means,
Clustering CS 550: Machine Learning
 Clustering CS 550: Machine Learning This slide set mainly uses the slides given in the following links: http://www-users.cs.umn.edu/~kumar/dmbook/ch8.pdf http://www-users.cs.umn.edu/~kumar/dmbook/dmslides/chap8_basic_cluster_analysis.pdf
Clustering CS 550: Machine Learning This slide set mainly uses the slides given in the following links: http://www-users.cs.umn.edu/~kumar/dmbook/ch8.pdf http://www-users.cs.umn.edu/~kumar/dmbook/dmslides/chap8_basic_cluster_analysis.pdf
Normalized cuts and image segmentation
 Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
Normalized cuts and image segmentation Department of EE University of Washington Yeping Su Xiaodan Song Normalized Cuts and Image Segmentation, IEEE Trans. PAMI, August 2000 5/20/2003 1 Outline 1. Image
CMPSCI 670: Computer Vision! Grouping
 CMPSCI 670: Computer Vision! Grouping University of Massachusetts, Amherst October 14, 2014 Instructor: Subhransu Maji Slides credit: Kristen Grauman and others Final project guidelines posted Milestones
CMPSCI 670: Computer Vision! Grouping University of Massachusetts, Amherst October 14, 2014 Instructor: Subhransu Maji Slides credit: Kristen Grauman and others Final project guidelines posted Milestones
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Clustering. So far in the course. Clustering. Clustering. Subhransu Maji. CMPSCI 689: Machine Learning. dist(x, y) = x y 2 2
 = x y 2 2") So far in the course Clustering Subhransu Maji : Machine Learning 2 April 2015 7 April 2015 Supervised learning: learning with a teacher You had training data which was (feature, label) pairs and the goal
So far in the course Clustering Subhransu Maji : Machine Learning 2 April 2015 7 April 2015 Supervised learning: learning with a teacher You had training data which was (feature, label) pairs and the goal
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Part I. Hierarchical clustering. Hierarchical Clustering. Hierarchical clustering. Produces a set of nested clusters organized as a
 Week 9 Based in part on slides from textbook, slides of Susan Holmes Part I December 2, 2012 Hierarchical Clustering 1 / 1 Produces a set of nested clusters organized as a Hierarchical hierarchical clustering
Week 9 Based in part on slides from textbook, slides of Susan Holmes Part I December 2, 2012 Hierarchical Clustering 1 / 1 Produces a set of nested clusters organized as a Hierarchical hierarchical clustering
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Cluster Analysis. Ying Shen, SSE, Tongji University
 Cluster Analysis Ying Shen, SSE, Tongji University Cluster analysis Cluster analysis groups data objects based only on the attributes in the data. The main objective is that The objects within a group
Cluster Analysis Ying Shen, SSE, Tongji University Cluster analysis Cluster analysis groups data objects based only on the attributes in the data. The main objective is that The objects within a group
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Clustering. Subhransu Maji. CMPSCI 689: Machine Learning. 2 April April 2015
 Clustering Subhransu Maji CMPSCI 689: Machine Learning 2 April 2015 7 April 2015 So far in the course Supervised learning: learning with a teacher You had training data which was (feature, label) pairs
Clustering Subhransu Maji CMPSCI 689: Machine Learning 2 April 2015 7 April 2015 So far in the course Supervised learning: learning with a teacher You had training data which was (feature, label) pairs
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Fitting. Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local
 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
9.913 Pattern Recognition for Vision. Class I - Overview. Instructors: B. Heisele, Y. Ivanov, T. Poggio
 9.913 Class I - Overview Instructors: B. Heisele, Y. Ivanov, T. Poggio TOC Administrivia Problems of Computer Vision and Pattern Recognition Overview of classes Quick review of Matlab Administrivia Instructors:
9.913 Class I - Overview Instructors: B. Heisele, Y. Ivanov, T. Poggio TOC Administrivia Problems of Computer Vision and Pattern Recognition Overview of classes Quick review of Matlab Administrivia Instructors:
Classification. Vladimir Curic. Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University
 Classification Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University Outline An overview on classification Basics of classification How to choose appropriate
Classification Vladimir Curic Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University Outline An overview on classification Basics of classification How to choose appropriate
Cluster Analysis. Mu-Chun Su. Department of Computer Science and Information Engineering National Central University 2003/3/11 1
 Cluster Analysis Mu-Chun Su Department of Computer Science and Information Engineering National Central University 2003/3/11 1 Introduction Cluster analysis is the formal study of algorithms and methods
Cluster Analysis Mu-Chun Su Department of Computer Science and Information Engineering National Central University 2003/3/11 1 Introduction Cluster analysis is the formal study of algorithms and methods
Lecture 10: Semantic Segmentation and Clustering
 Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Lecture 10: Semantic Segmentation and Clustering Vineet Kosaraju, Davy Ragland, Adrien Truong, Effie Nehoran, Maneekwan Toyungyernsub Department of Computer Science Stanford University Stanford, CA 94305
Computer Vision Lecture 6
 Course Outline Computer Vision Lecture 6 Segmentation Image Processing Basics Structure Extraction Segmentation Segmentation as Clustering Graph-theoretic Segmentation 12.11.2015 Recognition Global Representations
Course Outline Computer Vision Lecture 6 Segmentation Image Processing Basics Structure Extraction Segmentation Segmentation as Clustering Graph-theoretic Segmentation 12.11.2015 Recognition Global Representations
CS 2750: Machine Learning. Clustering. Prof. Adriana Kovashka University of Pittsburgh January 17, 2017
 CS 2750: Machine Learning Clustering Prof. Adriana Kovashka University of Pittsburgh January 17, 2017 What is clustering? Grouping items that belong together (i.e. have similar features) Unsupervised:
CS 2750: Machine Learning Clustering Prof. Adriana Kovashka University of Pittsburgh January 17, 2017 What is clustering? Grouping items that belong together (i.e. have similar features) Unsupervised:
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Segmentation: Clustering, Graph Cut and EM
 Segmentation: Clustering, Graph Cut and EM Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu
Segmentation: Clustering, Graph Cut and EM Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu
Network Traffic Measurements and Analysis
 DEIB - Politecnico di Milano Fall, 2017 Introduction Often, we have only a set of features x = x 1, x 2,, x n, but no associated response y. Therefore we are not interested in prediction nor classification,
DEIB - Politecnico di Milano Fall, 2017 Introduction Often, we have only a set of features x = x 1, x 2,, x n, but no associated response y. Therefore we are not interested in prediction nor classification,
Hard clustering. Each object is assigned to one and only one cluster. Hierarchical clustering is usually hard. Soft (fuzzy) clustering
 clustering") An unsupervised machine learning problem Grouping a set of objects in such a way that objects in the same group (a cluster) are more similar (in some sense or another) to each other than to those in other
An unsupervised machine learning problem Grouping a set of objects in such a way that objects in the same group (a cluster) are more similar (in some sense or another) to each other than to those in other
Motion Detection. Final project by. Neta Sokolovsky
 Motion Detection Final project by Neta Sokolovsky Introduction The goal of this project is to recognize a motion of objects found in the two given images. This functionality is useful in the video processing
Motion Detection Final project by Neta Sokolovsky Introduction The goal of this project is to recognize a motion of objects found in the two given images. This functionality is useful in the video processing
Markov Random Fields and Segmentation with Graph Cuts
 Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
Markov Random Fields and Segmentation with Graph Cuts Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project Proposal due Oct 27 (Thursday) HW 4 is out
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based