ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter
|
|
|
- Lionel Foster
- 6 years ago
- Views:
Transcription

1 ECE276A: Sensing & Estimation in Robotics Lecture 11: Simultaneous Localization and Mapping using a Particle Filter Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal: a2pal@eng.ucsd.edu 1
2 Markov Localization Robot Localization Problem: Given a map m, a sequence of control inputs u 0:t 1, and a sequence of measurements z 0:t, infer the state (e.g., pose) of the robot x t Approach: use a Bayes filter with a multi-modal distribution in order to cature multiple hypotheses about the robot state, e.g.: Gaussian mixture filter Particle filter Histogram filter Pruning: need to keep the number of hypotheses/components under control Important considerations: What are the motion and observation models and how is the map represented? 2
3 Histogram Filter Localization (1-D) Prior: 3
4 Histogram Filter Localization (1-D) Prior: Update: 3
 Prior: Update: Predict:")
5 Histogram Filter Localization (1-D) Prior: Update: Predict: 3
6 Histogram Filter Localization (1-D) Prior: Update: Predict: Update: 3


7 Histogram Filter Localization (2-D) 4
8 Particle Filter Localization (1-D) Prior: 5
9 Particle Filter Localization (1-D) Prior: Update: 5
10 Particle Filter Localization (1-D) Prior: Update: Predict: 5

11 Particle Filter Localization (1-D) Prior: Update: Predict: Resample: 5
12 Particle Filter Localization (1-D) Prior: 6
13 Particle Filter Localization (1-D) Prior: Update: 6
14 Particle Filter Localization (1-D) Prior: Update: Predict: 6

15 Particle Filter Localization (1-D) Prior: Update: Predict: Resample: 6
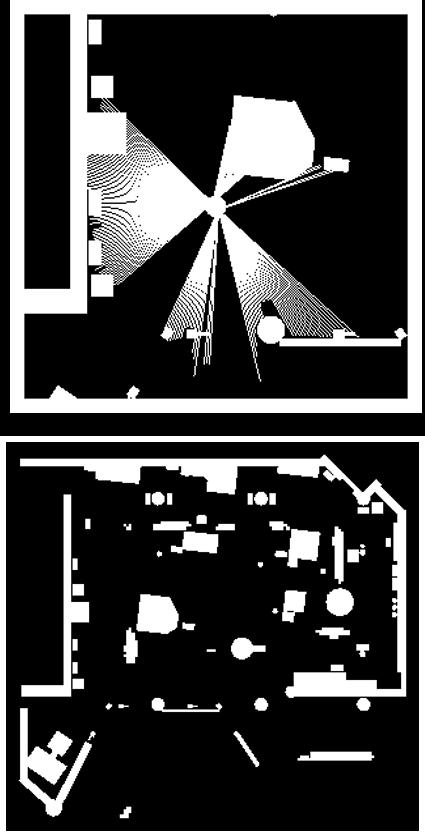
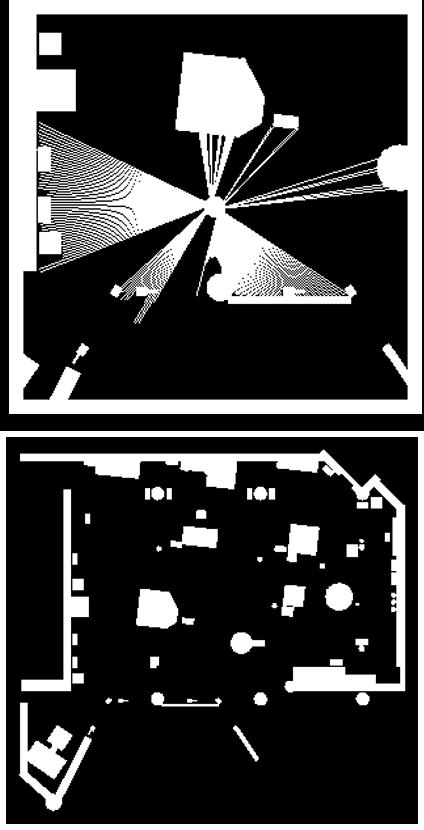
16 Particle Filter Localization (2-D) 7
17 Particle Filter Localization (2-D) 8

18 Particle Filter Localization (2-D) 9
19 Particle Filter Localization (2-D) 10
20 Particle Filter Localization (2-D) 11
21 Particle Filter Localization (2-D) 12
22 Particle Filter Localization (2-D) 13
23 Particle Filter Localization (2-D) 14
24 Particle Filter Localization (2-D) 15
25 Particle Filter Localization (2-D) 16
26 Particle Filter Localization (2-D) 17
27 Particle Filter Localization (2-D) 18
28 Particle Filter Localization (2-D) 19
29 Particle Filter Localization (2-D) 20
30 Particle Filter Localization (2-D) 21
31 Particle Filter Localization (2-D) 22
32 Particle Filter Localization (2-D) 23



33 Map Representations I Landmark-based: a collection of objects, each having a position, orientation, and object class I Polygonal mesh: a collection of points and connectivity information among them, forming polygons I Surfels: a collection of oriented discs containing photometric information I Occupancy grid: a discretization of space into cells with a binary occupancy model 24
 with prob. γ i,t := p(m i = 1 z 0:t ) m i z 0:t = Free (0) with prob. 1 γ i.")
34 Occupancy Grid An occupancy grid is a collection m {0, 1} d of independent Bernoulli random variables m i for i = 1,..., d Given occupancy measurements z 0:t, the distribution of m i is: { Occupied (1) with prob. γ i,t := p(m i = 1 z 0:t ) m i z 0:t = Free (0) with prob. 1 γ i.t How do we update the map distribution over time? Estimate the occupancy probability γ i,t using the measurements z 0:t and the robot state to transform them to the world frame Keep track of the cell log-odds: λ i,t+1 = λ i,t + λ i,t Measurement trust Usually constrain λ MIN λ i,t λ MAX May put a decay on λ i,t to handle changing maps 25
35 Bayes Rule using Log-Odds The odds ratio of a binary random variable m i updated over time via Bayes rule and measurements z is: p(m i = 1 z) = 1 η p h(z m i = 1)p(m i = 1) p(m i = 0 z) = 1 p(m i = 1 z) = p h(z m i = 1) p(m i = 1) η p p(m h(z m i = 0)p(m i = 0) i = 0 z) p }{{} h (z m i = 0) p(m }{{} i = 0) }{{} o(m i z) g(z) o(m i ) A simple observation model, specifying how much we trust occupancy measurements (e.g., from a Laser scanner), can be used. Example: g(1) = p h(z m i = 1) p h (z m i = 0) = 80% 20% = 4 g(0) = 1 4 Estimating the pdf of m i conditioned on z 0:t is equivalent to accumulating the log-odds ratio: t λ(m i z 0:t ) := log o(m i z 0:t ) = log(g(z t m i )o(m i z 0:t 1 )) = λ(m i ) + log g(z s m i ) Recover pdf from log-odds: p(m i = 1 z 0:t ) = exp(λ(m i z 0:t )) s=0 26
 y in the grid that correspond to the scan 2.")
36 Scan Matching Observation Model An observation model for a laser scan z obtained from sensor pose x in an occupancy map m can be obtained by modeling the correlation between z and m as follows: 1. Transform the scan z to the world frame using x and find all points (or only hit points) y in the grid that correspond to the scan 2. Let the observation model be proportional to the similarty corr(y, m) between the transformed scan y and the grid m The correlation is large if y and m agree: corr(y, m) := i 1{m i = y i } The weights can be converted to probabilities via the softmax function: p h (z x, m) = ecorr(y,m) v ecorr(v,m) ecorr(y,m) 27
37 Simultaneous Localization & Mapping (SLAM) Chicken-and-egg problem: Given the pose it is easy to build a map (accumulate log-odds!) Given the map it is easy to localize (particle filter + scan matching) EM: suppose x t is a hidden variable and m are the parameters. Given an inital map m (0), e.g., obtained from the first scan, iterate: E: Estimate the distribution of x t given m (i) M: Update m (i+1) by maximizing (over m) the log-likelihood of the measurements conditioned on x t and m Filtering: maintain a joint pdf over the robot state x t and map m via KF, EKF, UKF: p(x t, m z 0:t, u 0:t 1 ) Smoothing: maintain a pdf over the robot trajectory x 0:t and map m: Occupancy grid: Fast SLAM exploits that the occupancy grid cells are independent conditioned on the robot trajectory: p(x 0:t, m z 0:t, u 0:t 1 ) = p(x 0:t z 0:t, u 0:t 1 ) i p(m i z 0:t, x 0:t ) Landmark-based: Rao-Blackwellized Particle Filter uses particles for x 0:t and Gaussian distributions for the landmark poses Landmark-based: Kalman smoothing and Factor graphs are the state-of-the-art 28

38 Project 3: Humanoid THOR I RGBD camera I 2D Lidar I IMU I Odometry I Transforms 29

39 Project 3: Localization and Textured Map 30
40 Project 3: Overview Initial particle set µ (k) 0 0 = (0, 0, 0)T SE(2) with weights α (k) 0 0 = 1 N Use first laser scan to initialize the map: 1. use head angle to remove the ground plane from the scan 2. convert the scan to Cartesian coordinates 3. convert the scan to cells and update the map log-odds (via bresenham2d or cv2.drawcontours) Use an odometry motion model to predict motion for each particle Use the laser scan from each particle to compute map correlation (via getmapcorrelation) and update the particle weights Choose the best particle, project the laser scan, and update the map log-odds (in general, each particle should maintain its own map) Textured map: use RGBD images from the best particle pose to assign colors to the occupancy grid cells 31
Overview. EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping. Statistical Models
 Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
Introduction ti to Embedded dsystems EECS 124, UC Berkeley, Spring 2008 Lecture 23: Localization and Mapping Gabe Hoffmann Ph.D. Candidate, Aero/Astro Engineering Stanford University Statistical Models
L17. OCCUPANCY MAPS. NA568 Mobile Robotics: Methods & Algorithms
 L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
L17. OCCUPANCY MAPS NA568 Mobile Robotics: Methods & Algorithms Today s Topic Why Occupancy Maps? Bayes Binary Filters Log-odds Occupancy Maps Inverse sensor model Learning inverse sensor model ML map
This chapter explains two techniques which are frequently used throughout
 Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Chapter 2 Basic Techniques This chapter explains two techniques which are frequently used throughout this thesis. First, we will introduce the concept of particle filters. A particle filter is a recursive
Probabilistic Robotics
 Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
Probabilistic Robotics Sebastian Thrun Wolfram Burgard Dieter Fox The MIT Press Cambridge, Massachusetts London, England Preface xvii Acknowledgments xix I Basics 1 1 Introduction 3 1.1 Uncertainty in
IROS 05 Tutorial. MCL: Global Localization (Sonar) Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing
 Monte-Carlo Localization. Particle Filters. Rao-Blackwellized Particle Filters and Loop Closing") IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
IROS 05 Tutorial SLAM - Getting it Working in Real World Applications Rao-Blackwellized Particle Filters and Loop Closing Cyrill Stachniss and Wolfram Burgard University of Freiburg, Dept. of Computer
Final project: 45% of the grade, 10% presentation, 35% write-up. Presentations: in lecture Dec 1 and schedule:
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements. Recap Landmark based SLAM. Types of SLAM-Problems. Occupancy Grid Maps. Grid-based SLAM. Page 1. CS 287: Advanced Robotics Fall 2009
 Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Announcements PS2: due Friday 23:59pm. Final project: 45% of the grade, 10% presentation, 35% write-up Presentations: in lecture Dec 1 and 3 --- schedule: CS 287: Advanced Robotics Fall 2009 Lecture 24:
Navigation methods and systems
 Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Navigation methods and systems Navigare necesse est Content: Navigation of mobile robots a short overview Maps Motion Planning SLAM (Simultaneous Localization and Mapping) Navigation of mobile robots a
Probabilistic Robotics
 Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics FastSLAM Sebastian Thrun (abridged and adapted by Rodrigo Ventura in Oct-2008) The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while
Probabilistic Robotics
 Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
Probabilistic Robotics Bayes Filter Implementations Discrete filters, Particle filters Piecewise Constant Representation of belief 2 Discrete Bayes Filter Algorithm 1. Algorithm Discrete_Bayes_filter(
COS Lecture 13 Autonomous Robot Navigation
 COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 13 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
L10. PARTICLE FILTERING CONTINUED. NA568 Mobile Robotics: Methods & Algorithms
 L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
L10. PARTICLE FILTERING CONTINUED NA568 Mobile Robotics: Methods & Algorithms Gaussian Filters The Kalman filter and its variants can only model (unimodal) Gaussian distributions Courtesy: K. Arras Motivation
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Introduction to Mobile Robotics SLAM Grid-based FastSLAM. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to Mobile Robotics SLAM Grid-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 The SLAM Problem SLAM stands for simultaneous localization
Introduction to robot algorithms CSE 410/510
 Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to robot algorithms CSE 410/510 Rob Platt robplatt@buffalo.edu Times: MWF, 10-10:50 Location: Clemens 322 Course web page: http://people.csail.mit.edu/rplatt/cse510.html Office Hours: 11-12
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization. Wolfram Burgard
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard 1 Motivation Recall: Discrete filter Discretize the continuous state space High memory complexity
Particle Filters. CSE-571 Probabilistic Robotics. Dependencies. Particle Filter Algorithm. Fast-SLAM Mapping
 CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
CSE-571 Probabilistic Robotics Fast-SLAM Mapping Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Sampling Importance Resampling (SIR) principle Draw
Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization
 Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Statistical Techniques in Robotics (16-831, F11) Lecture#20 (November 21, 2011) Gaussian Processes, SLAM, Fast SLAM and Rao-Blackwellization Lecturer: Drew Bagnell Scribes: Junier Oliva 1 1 Comments on
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM
 Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Introduction to Mobile Robotics SLAM Landmark-based FastSLAM Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Partial slide courtesy of Mike Montemerlo 1 The SLAM Problem
Particle Filter in Brief. Robot Mapping. FastSLAM Feature-based SLAM with Particle Filters. Particle Representation. Particle Filter Algorithm
 Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Robot Mapping FastSLAM Feature-based SLAM with Particle Filters Cyrill Stachniss Particle Filter in Brief! Non-parametric, recursive Bayes filter! Posterior is represented by a set of weighted samples!
Humanoid Robotics. Monte Carlo Localization. Maren Bennewitz
 Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Humanoid Robotics Monte Carlo Localization Maren Bennewitz 1 Basis Probability Rules (1) If x and y are independent: Bayes rule: Often written as: The denominator is a normalizing constant that ensures
Simultaneous Localization and Mapping
 Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Sebastian Lembcke SLAM 1 / 29 MIN Faculty Department of Informatics Simultaneous Localization and Mapping Visual Loop-Closure Detection University of Hamburg Faculty of Mathematics, Informatics and Natural
Robotics. Chapter 25-b. Chapter 25-b 1
 Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
Robotics Chapter 25-b Chapter 25-b 1 Particle Filtering Particle filtering uses a population of particles (each particle is a state estimate) to localize a robot s position. This is called Monte Carlo
Probabilistic Robotics
 Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics Discrete Filters and Particle Filters Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Probabilistic
Probabilistic Robotics. FastSLAM
 Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Probabilistic Robotics FastSLAM The SLAM Problem SLAM stands for simultaneous localization and mapping The task of building a map while estimating the pose of the robot relative to this map Why is SLAM
Robot Mapping. Grid Maps. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Robot Mapping Grid Maps Gian Diego Tipaldi, Wolfram Burgard 1 Features vs. Volumetric Maps Courtesy: D. Hähnel Courtesy: E. Nebot 2 Features So far, we only used feature maps Natural choice for Kalman
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg
 Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg") Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
Survey: Simultaneous Localisation and Mapping (SLAM) Ronja Güldenring Master Informatics Project Intellgient Robotics University of Hamburg Introduction EKF-SLAM FastSLAM Loop Closure 01.06.17 Ronja Güldenring
AUTONOMOUS SYSTEMS. LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping
 AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
AUTONOMOUS SYSTEMS LOCALIZATION, MAPPING & SIMULTANEOUS LOCALIZATION AND MAPPING Part V Mapping & Occupancy Grid Mapping Maria Isabel Ribeiro Pedro Lima with revisions introduced by Rodrigo Ventura Instituto
Robot Mapping. A Short Introduction to the Bayes Filter and Related Models. Gian Diego Tipaldi, Wolfram Burgard
 Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Robot Mapping A Short Introduction to the Bayes Filter and Related Models Gian Diego Tipaldi, Wolfram Burgard 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Recursive
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching
 Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Visual Bearing-Only Simultaneous Localization and Mapping with Improved Feature Matching Hauke Strasdat, Cyrill Stachniss, Maren Bennewitz, and Wolfram Burgard Computer Science Institute, University of
Practical Course WS12/13 Introduction to Monte Carlo Localization
 Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Practical Course WS12/13 Introduction to Monte Carlo Localization Cyrill Stachniss and Luciano Spinello 1 State Estimation Estimate the state of a system given observations and controls Goal: 2 Bayes Filter
Spring Localization II. Roland Siegwart, Margarita Chli, Juan Nieto, Nick Lawrance. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2018 Localization II Localization I 16.04.2018 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
SLAM: Robotic Simultaneous Location and Mapping
 SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
SLAM: Robotic Simultaneous Location and Mapping William Regli Department of Computer Science (and Departments of ECE and MEM) Drexel University Acknowledgments to Sebastian Thrun & others SLAM Lecture
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History
 Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
Revising Stereo Vision Maps in Particle Filter Based SLAM using Localisation Confidence and Sample History Simon Thompson and Satoshi Kagami Digital Human Research Center National Institute of Advanced
ME 456: Probabilistic Robotics
 ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
ME 456: Probabilistic Robotics Week 5, Lecture 2 SLAM Reading: Chapters 10,13 HW 2 due Oct 30, 11:59 PM Introduction In state esemaeon and Bayes filter lectures, we showed how to find robot s pose based
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping
 Lecture#05 (Wednesday, September 12) Mapping") Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Statistical Techniques in Robotics (16-831, F12) Lecture#05 (Wednesday, September 12) Mapping Lecturer: Alex Styler (in for Drew Bagnell) Scribe: Victor Hwang 1 1 Occupancy Mapping When solving the localization
Simultaneous Localization and Mapping (SLAM)
") Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
Simultaneous Localization and Mapping (SLAM) RSS Lecture 16 April 8, 2013 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 SLAM Problem Statement Inputs: No external coordinate reference Time series of
What is the SLAM problem?
 SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
SLAM Tutorial Slides by Marios Xanthidis, C. Stachniss, P. Allen, C. Fermuller Paul Furgale, Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart What is the SLAM problem? The
7630 Autonomous Robotics Probabilities for Robotics
 7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
7630 Autonomous Robotics Probabilities for Robotics Basics of probability theory The Bayes-Filter Introduction to localization problems Monte-Carlo-Localization Based on material from R. Triebel, R. Kästner
Artificial Intelligence for Robotics: A Brief Summary
 Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Artificial Intelligence for Robotics: A Brief Summary This document provides a summary of the course, Artificial Intelligence for Robotics, and highlights main concepts. Lesson 1: Localization (using Histogram
Spring Localization II. Roland Siegwart, Margarita Chli, Martin Rufli. ASL Autonomous Systems Lab. Autonomous Mobile Robots
 Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Spring 2016 Localization II Localization I 25.04.2016 1 knowledge, data base mission commands Localization Map Building environment model local map position global map Cognition Path Planning path Perception
Simultaneous Localization
 Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Simultaneous Localization and Mapping (SLAM) RSS Technical Lecture 16 April 9, 2012 Prof. Teller Text: Siegwart and Nourbakhsh S. 5.8 Navigation Overview Where am I? Where am I going? Localization Assumed
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots
 Lecture#05 (Monday, January 26) Lecturer: Byron Boots") Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Statistical Techniques in Robotics (STR, S15) Lecture#05 (Monday, January 26) Lecturer: Byron Boots Mapping 1 Occupancy Mapping When solving the localization problem, we had a map of the world and tried
Monte Carlo Localization using Dynamically Expanding Occupancy Grids. Karan M. Gupta
 1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
1 Monte Carlo Localization using Dynamically Expanding Occupancy Grids Karan M. Gupta Agenda Introduction Occupancy Grids Sonar Sensor Model Dynamically Expanding Occupancy Grids Monte Carlo Localization
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps
 Lecture#06(Thursday September 11) Occupancy Maps") Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
Statistical Techniques in Robotics (16-831, F10) Lecture#06(Thursday September 11) Occupancy Maps Lecturer: Drew Bagnell Scribes: {agiri, dmcconac, kumarsha, nbhakta} 1 1 Occupancy Mapping: An Introduction
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Introduction to Mobile Robotics. SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping The SLAM Problem SLAM is the process by which a robot builds a map of the environment and, at the same time, uses this map to
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Robotics. Chapter 25. Chapter 25 1
 Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Robotics Chapter 25 Chapter 25 1 Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Chapter 25 2 Mobile Robots Chapter 25 3 Manipulators P R R R R R Configuration of robot
Adapting the Sample Size in Particle Filters Through KLD-Sampling
 Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Adapting the Sample Size in Particle Filters Through KLD-Sampling Dieter Fox Department of Computer Science & Engineering University of Washington Seattle, WA 98195 Email: fox@cs.washington.edu Abstract
Sensor Models / Occupancy Mapping / Density Mapping
 Statistical Techniques in Robotics (16-831, F09) Lecture #3 (09/01/2009) Sensor Models / Occupancy Mapping / Density Mapping Lecturer: Drew Bagnell Scribe: Mehmet R. Dogar 1 Sensor Models 1.1 Beam Model
Statistical Techniques in Robotics (16-831, F09) Lecture #3 (09/01/2009) Sensor Models / Occupancy Mapping / Density Mapping Lecturer: Drew Bagnell Scribe: Mehmet R. Dogar 1 Sensor Models 1.1 Beam Model
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM
 CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
CSE 490R P1 - Localization using Particle Filters Due date: Sun, Jan 28-11:59 PM 1 Introduction In this assignment you will implement a particle filter to localize your car within a known map. This will
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
SLAM Part 2 and Intro to Kernel Machines
 Statistical Techniques in Robotics (16-831, F11) Lecture #21 (Nov 28, 2011) SLAM Part 2 and Intro to Kernel Machines Lecturer: Drew Bagnell Scribe: Robbie Paolini 1 1 Fast SLAM Fast SLAM is an algorithm
Statistical Techniques in Robotics (16-831, F11) Lecture #21 (Nov 28, 2011) SLAM Part 2 and Intro to Kernel Machines Lecturer: Drew Bagnell Scribe: Robbie Paolini 1 1 Fast SLAM Fast SLAM is an algorithm
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
A Sample of Monte Carlo Methods in Robotics and Vision. Credits. Outline. Structure from Motion. without Correspondences
 A Sample of Monte Carlo Methods in Robotics and Vision Frank Dellaert College of Computing Georgia Institute of Technology Credits Zia Khan Tucker Balch Michael Kaess Rafal Zboinski Ananth Ranganathan
A Sample of Monte Carlo Methods in Robotics and Vision Frank Dellaert College of Computing Georgia Institute of Technology Credits Zia Khan Tucker Balch Michael Kaess Rafal Zboinski Ananth Ranganathan
Implementation of Odometry with EKF for Localization of Hector SLAM Method
 Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
Implementation of Odometry with EKF for Localization of Hector SLAM Method Kao-Shing Hwang 1 Wei-Cheng Jiang 2 Zuo-Syuan Wang 3 Department of Electrical Engineering, National Sun Yat-sen University, Kaohsiung,
F1/10 th Autonomous Racing. Localization. Nischal K N
 F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
F1/10 th Autonomous Racing Localization Nischal K N System Overview Mapping Hector Mapping Localization Path Planning Control System Overview Mapping Hector Mapping Localization Adaptive Monte Carlo Localization
Introduction to SLAM Part II. Paul Robertson
 Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
Introduction to SLAM Part II Paul Robertson Localization Review Tracking, Global Localization, Kidnapping Problem. Kalman Filter Quadratic Linear (unless EKF) SLAM Loop closing Scaling: Partition space
ECE521: Week 11, Lecture March 2017: HMM learning/inference. With thanks to Russ Salakhutdinov
 ECE521: Week 11, Lecture 20 27 March 2017: HMM learning/inference With thanks to Russ Salakhutdinov Examples of other perspectives Murphy 17.4 End of Russell & Norvig 15.2 (Artificial Intelligence: A Modern
ECE521: Week 11, Lecture 20 27 March 2017: HMM learning/inference With thanks to Russ Salakhutdinov Examples of other perspectives Murphy 17.4 End of Russell & Norvig 15.2 (Artificial Intelligence: A Modern
Simultaneous Localization and Mapping! SLAM
 Overview Simultaneous Localization and Mapping! SLAM What is SLAM? Qualifying Oral Examination Why do SLAM? Who, When, Where?!! A very brief literature overview Andrew Hogue hogue@cs.yorku.ca How has the
Overview Simultaneous Localization and Mapping! SLAM What is SLAM? Qualifying Oral Examination Why do SLAM? Who, When, Where?!! A very brief literature overview Andrew Hogue hogue@cs.yorku.ca How has the
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little
 Se, Lowe, and Little") SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
SLAM with SIFT (aka Mobile Robot Localization and Mapping with Uncertainty using Scale-Invariant Visual Landmarks ) Se, Lowe, and Little + Presented by Matt Loper CS296-3: Robot Learning and Autonomy Brown
PML-SLAM: a solution for localization in large-scale urban environments
 PML-SLAM: a solution for localization in large-scale urban environments Zayed Alsayed, Guillaume Bresson, Fawzi Nashashibi and Anne Verroust-Blondet Institut VEDECOM Versailles, France firstname.name@vedecom.fr
PML-SLAM: a solution for localization in large-scale urban environments Zayed Alsayed, Guillaume Bresson, Fawzi Nashashibi and Anne Verroust-Blondet Institut VEDECOM Versailles, France firstname.name@vedecom.fr
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper
 USING DIFFERENTIAL DRIVE MOBILE ROBOT. Full Paper") Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Jurnal Teknologi PARTICLE FILTER IN SIMULTANEOUS LOCALIZATION AND MAPPING (SLAM) USING DIFFERENTIAL DRIVE MOBILE ROBOT Norhidayah Mohamad Yatim a,b, Norlida Buniyamin a a Faculty of Engineering, Universiti
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Mobile Robot Map Learning from Range Data in Dynamic Environments
 1 Mobile Robot Map Learning from Range Data in Dynamic Environments Wolfram Burgard 1 Cyrill Stachniss 1,2 Dirk Hähnel 1,3 1 University of Freiburg, Dept. of Computer Science, 79110 Freiburg, Germany 2
1 Mobile Robot Map Learning from Range Data in Dynamic Environments Wolfram Burgard 1 Cyrill Stachniss 1,2 Dirk Hähnel 1,3 1 University of Freiburg, Dept. of Computer Science, 79110 Freiburg, Germany 2
Robot Mapping. Graph-Based SLAM with Landmarks. Cyrill Stachniss
 Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
Robot Mapping Graph-Based SLAM with Landmarks Cyrill Stachniss 1 Graph-Based SLAM (Chap. 15) Use a graph to represent the problem Every node in the graph corresponds to a pose of the robot during mapping
CSE-571 Robotics. Sensors for Mobile Robots. Beam-based Sensor Model. Proximity Sensors. Probabilistic Sensor Models. Beam-based Scan-based Landmarks
 Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Sensors for Mobile Robots CSE-57 Robotics Probabilistic Sensor Models Beam-based Scan-based Landmarks Contact sensors: Bumpers Internal sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Multi-Robot Navigation and Cooperative Mapping in a Circular Topology
 Multi-Robot Navigation and Cooperative Mapping in a Circular Topology Simon Bultmann, Laëtitia Matignon, Olivier Simonin To cite this version: Simon Bultmann, Laëtitia Matignon, Olivier Simonin. Multi-Robot
Multi-Robot Navigation and Cooperative Mapping in a Circular Topology Simon Bultmann, Laëtitia Matignon, Olivier Simonin To cite this version: Simon Bultmann, Laëtitia Matignon, Olivier Simonin. Multi-Robot
Mobile Robot Mapping and Localization in Non-Static Environments
 Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Mobile Robot Mapping and Localization in Non-Static Environments Cyrill Stachniss Wolfram Burgard University of Freiburg, Department of Computer Science, D-790 Freiburg, Germany {stachnis burgard @informatik.uni-freiburg.de}
Vehicle Localization. Hannah Rae Kerner 21 April 2015
 Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Vehicle Localization Hannah Rae Kerner 21 April 2015 Spotted in Mtn View: Google Car Why precision localization? in order for a robot to follow a road, it needs to know where the road is to stay in a particular
Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots
 using Miniature Robots") Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots Objectives SLAM approaches SLAM for ALICE EKF for Navigation Mapping and Network Modeling Test results Philipp Schaer and Adrian
Offline Simultaneous Localization and Mapping (SLAM) using Miniature Robots Objectives SLAM approaches SLAM for ALICE EKF for Navigation Mapping and Network Modeling Test results Philipp Schaer and Adrian
Basics of Localization, Mapping and SLAM. Jari Saarinen Aalto University Department of Automation and systems Technology
 Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
Basics of Localization, Mapping and SLAM Jari Saarinen Aalto University Department of Automation and systems Technology Content Introduction to Problem (s) Localization A few basic equations Dead Reckoning
High-precision, consistent EKF-based visual-inertial odometry
 High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
High-precision, consistent EKF-based visual-inertial odometry Mingyang Li and Anastasios I. Mourikis, IJRR 2013 Ao Li Introduction What is visual-inertial odometry (VIO)? The problem of motion tracking
Robotics. Lecture 5: Monte Carlo Localisation. See course website for up to date information.
 Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
Robotics Lecture 5: Monte Carlo Localisation See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review:
L15. POSE-GRAPH SLAM. NA568 Mobile Robotics: Methods & Algorithms
 L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
L15. POSE-GRAPH SLAM NA568 Mobile Robotics: Methods & Algorithms Today s Topic Nonlinear Least Squares Pose-Graph SLAM Incremental Smoothing and Mapping Feature-Based SLAM Filtering Problem: Motion Prediction
10-701/15-781, Fall 2006, Final
 -7/-78, Fall 6, Final Dec, :pm-8:pm There are 9 questions in this exam ( pages including this cover sheet). If you need more room to work out your answer to a question, use the back of the page and clearly
-7/-78, Fall 6, Final Dec, :pm-8:pm There are 9 questions in this exam ( pages including this cover sheet). If you need more room to work out your answer to a question, use the back of the page and clearly
Inference and Representation
 Inference and Representation Rachel Hodos New York University Lecture 5, October 6, 2015 Rachel Hodos Lecture 5: Inference and Representation Today: Learning with hidden variables Outline: Unsupervised
Inference and Representation Rachel Hodos New York University Lecture 5, October 6, 2015 Rachel Hodos Lecture 5: Inference and Representation Today: Learning with hidden variables Outline: Unsupervised
Probabilistic Robotics
 Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
Probabilistic Robotics Probabilistic Motion and Sensor Models Some slides adopted from: Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras and Probabilistic Robotics Book SA-1 Sensors for Mobile
3D Point Cloud Processing
 3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
3D Point Cloud Processing The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in intensity that give the robot a single
CVPR 2014 Visual SLAM Tutorial Efficient Inference
 CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
CVPR 2014 Visual SLAM Tutorial Efficient Inference kaess@cmu.edu The Robotics Institute Carnegie Mellon University The Mapping Problem (t=0) Robot Landmark Measurement Onboard sensors: Wheel odometry Inertial
How to Learn Accurate Grid Maps with a Humanoid
 How to Learn Accurate Grid Maps with a Humanoid Cyrill Stachniss Maren Bennewitz Giorgio Grisetti Sven Behnke Wolfram Burgard Abstract Humanoids have recently become a popular research platform in the
How to Learn Accurate Grid Maps with a Humanoid Cyrill Stachniss Maren Bennewitz Giorgio Grisetti Sven Behnke Wolfram Burgard Abstract Humanoids have recently become a popular research platform in the
Robot Mapping. SLAM Front-Ends. Cyrill Stachniss. Partial image courtesy: Edwin Olson 1
 Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Robot Mapping SLAM Front-Ends Cyrill Stachniss Partial image courtesy: Edwin Olson 1 Graph-Based SLAM Constraints connect the nodes through odometry and observations Robot pose Constraint 2 Graph-Based
Computer Vision 2 Lecture 8
 Computer Vision 2 Lecture 8 Multi-Object Tracking (30.05.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de
Computer Vision 2 Lecture 8 Multi-Object Tracking (30.05.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
AN INCREMENTAL SLAM ALGORITHM FOR INDOOR AUTONOMOUS NAVIGATION
 20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
20th IMEKO TC4 International Symposium and 18th International Workshop on ADC Modelling and Testing Research on Electric and Electronic Measurement for the Economic Upturn Benevento, Italy, September 15-17,
Kaijen Hsiao. Part A: Topics of Fascination
 Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Kaijen Hsiao Part A: Topics of Fascination 1) I am primarily interested in SLAM. I plan to do my project on an application of SLAM, and thus I am interested not only in the method we learned about in class,
Monte Carlo Methods for SLAM with Data Association Uncertainty
 Monte Carlo Methods for SLAM with Data Association Uncertainty Constantin Berzan Stuart J. Russell Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No.
Monte Carlo Methods for SLAM with Data Association Uncertainty Constantin Berzan Stuart J. Russell Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No.
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Monte Carlo Localization
 Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Monte Carlo Localization P. Hiemstra & A. Nederveen August 24, 2007 Abstract In this paper we investigate robot localization with the Augmented Monte Carlo Localization (amcl) algorithm. The goal of the
Grid-Based Models for Dynamic Environments
 Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Grid-Based Models for Dynamic Environments Daniel Meyer-Delius Maximilian Beinhofer Wolfram Burgard Abstract The majority of existing approaches to mobile robot mapping assume that the world is, an assumption
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car