Visual Learning and Recognition of 3D Objects from Appearance
|
|
|
- Ethan Thompson
- 6 years ago
- Views:
Transcription
1 Visual Learning and Recognition of 3D Objects from Appearance (H. Murase and S. Nayar, "Visual Learning and Recognition of 3D Objects from Appearance", International Journal of Computer Vision, vol. 14, pp. 5-24, 1995, on-line) Object recognition -Recognition is difficult because the appearance of an object can have a large range of variation due to: (1) photometric effects (2) scene clutter (3) changes in shape (4) viewpoint changes -Different views of the same object can give rise to widely different images!! Main research directions in object recognition Theoretical models of appearance: -Largely based on geometry. -Use geometric models to represent the shape of the object and explore correspondences between the geometric model and image features during recognition. - Given an unknown scene in this case, recognition implies the identification of a set of features from the unknown scene which approximately match a set of features from a known view ofamodel object.
.")
2 -2- Empirical models of appearance: - No explicit feature extraction takes place and each model view is stored as a vector of image intensities, represented in a low dimensional space (eigenspace). - Largely based on direct representations of image intensity (i.e., learn the appearance characteristics of an object from training imagery). -Build a model of the object by enumerating many possible object appearances in advance, obtained under various viewpoints and possibly different lighting conditions. -Recognition is performed by projecting the image of an object onto a point in the eigenspace. (1) The object is recognized based on the hyper-surface on which it lies. (2) The exact location of the point determines the pose of the object.
 For each object, obtain a large set of images by varying pose and illumination.")
3 -3- This case study -Recognize a 3D object and estimate its pose from its image appearance (i.e., without using geometric information) -Automatic procedure for learning object models using parametric eigenspaces. Methodology (1) For each object, obtain a large set of images by varying pose and illumination. (2) Represent the object as a manifold in a low-dimensional subspace which is obtained by compressing the image set (parametric eigenspace). (3) Recognize the identity and pose of a new object based on the manifold it lies on and its exact position on this manifold. Image acquisition -Place the object on a motorized turntable (controlled by software with an accuracy of0.1 degrees). -Vary the pose of the object (90 poses - every 4 degrees). -Vary the illumination direction using a robot manipulator (5 light ditections). -Each object is represented with 450 images.
 Resample the object region such that the larger of its two dimensions fits a pre-selected image size (128 x 128).")
4 -4- Image normalization -Scale normalization: (1) Segment the object from the bakground. (2) Set the background to zero (black). (3) Resample the object region such that the larger of its two dimensions fits a pre-selected image size (128 x 128). -Brightness normalization: (1) Each image is represented as an N 2 x1 vector Γ. (2) Brigtness normalization is applied such that Γ = 1

5 -5- Eigenspace construction -The eigenspace of the normalized images is constructed by computing the principal components. Universal eigenspace: computed using the image sets for all the objects. Object eigenspace: computed using only images of an object. -For the objects used here, 20 or less eigenvectors were enough.
6 -6- Manifold construction in universal eigenspace -All the training images for a particular object are projected to the universal eigenspace. ˆΦ =w 1 u 1 +w 2 u w K u K (K<<N 2 ) - For each image projected, we obtain a discrete point eigenspace. w i 1 w i 2... w i K in the universal -These discrete points define a smoothly varying manifold in eigenspace (the projections are close to one another since consecutive images are strongly correlated - see paper for a justification). - The manifold is parameterized by pose and illumination (parametric eigenspace representation). -Cubic spline interpolation is used to approximate the manifold from the discrete points.
7 -7- Manifold construction in object eigenspace -Same procedure is used to construct the manifold in the object space. Some comments about the manifolds - When the manifolds of two objects intersect in the universal eigenspace, then the object views corresponding to the intersection of the manifolds have similar appearance (ambiguous). - By approximating the manifolds using cubic splines, we can deal with object views, poses, or illumination directions that were not in the training set! Recognition and pose estimation Assumptions: the object is not occluded and has been segemented from the scene. (1) Normalize segmented region in scale and brightness. (2) Normalized image is first projected to universal space to identify the object. (3) Then, it is projected to the object s eigenspace to determine its pose.
8 -8- Determing the closest manifold point - Both in object recognition and pose estimation, we need to find the closest manifold. -Due to noise, the projection of an object might not lie exatcly on an object manifold. -Use specialized data structures to implement fast nearest-neighbor search in high dimensions (see paper for more details) Memory savings - Suppose we have 100 rotations and 100 illumination dirtections (i.e., 10,000 images) -The manifold is descibed by 10,000 points in a lower dimensional eigenspace (e.g., 10 eigenvectors). -The manifold representation yields a 1,600:1 compression ratio.

 Recognition and pose")
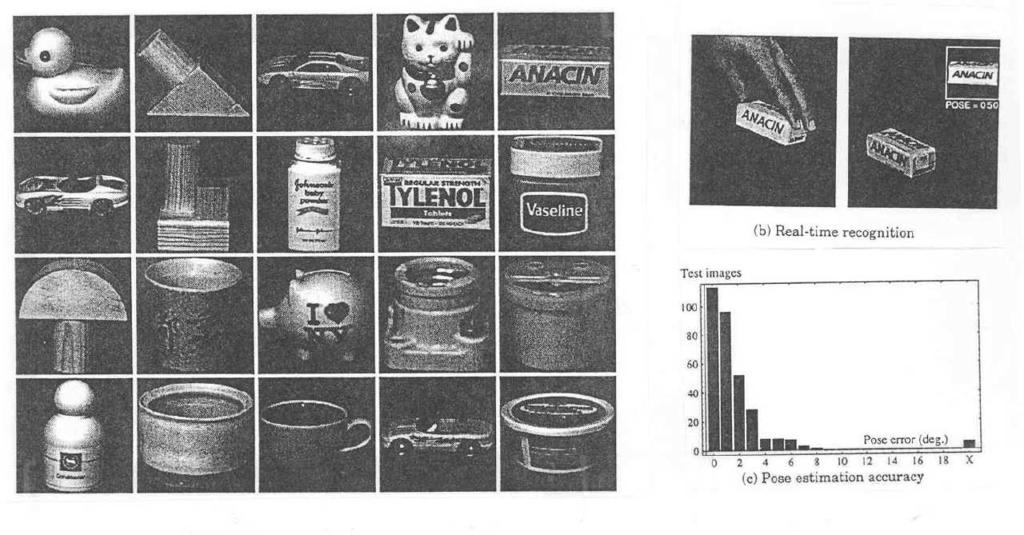
9 -9- Experiments and results -Read sections 4.1 and 4.2 (sensitivity to various parameters) Recognition and pose estimation of a moving car
10 -10- Recognition and pose estimation using 20 objects -72images per object (same illumination) -Used universal eigenspace only (20 eigenvectors) -Recognition takes less than 1 sec on a SUN Sparc -System tested on 320 images demonstrating 100% recognition accuracy. -The mean pose error was 1.59 degrees (sd: 1.53 degrees)
11 -11-
12 -12- Critique of PCA -Requires accurate registration of the face/object images. - Captures global modes of variation (i.e., it does not distinguish between image variations due to changes of identity or changes due to varying illumination). -Information about identity is somehow distributed over all the eigenvectors. -PCA projection-based representations do not necessarily give good class separability.
Recognition: Face Recognition. Linda Shapiro EE/CSE 576
 Recognition: Face Recognition Linda Shapiro EE/CSE 576 1 Face recognition: once you ve detected and cropped a face, try to recognize it Detection Recognition Sally 2 Face recognition: overview Typical
Recognition: Face Recognition Linda Shapiro EE/CSE 576 1 Face recognition: once you ve detected and cropped a face, try to recognize it Detection Recognition Sally 2 Face recognition: overview Typical
Learning by a Generation Approach to Appearance-based Object Recognition
 Learning by a Generation Approach to Appearance-based Object Recognition Hiroshi Murase Shree K. Nayar NTT Basic Research Labs Colombia University Morinosato Wakamiya, Atsugi New York, NY 10027 243-01,
Learning by a Generation Approach to Appearance-based Object Recognition Hiroshi Murase Shree K. Nayar NTT Basic Research Labs Colombia University Morinosato Wakamiya, Atsugi New York, NY 10027 243-01,
Learning Object Models from Appearance *
 From: AAAI-93 Proceedings. Copyright 1993, AAAI (www.aaai.org). All rights reserved. Learning Object Models from Appearance * Hiroshi Murase NTT Basic Research Labs 3-9-l 1 Midori-cho, Musashino-shi Tokyo
From: AAAI-93 Proceedings. Copyright 1993, AAAI (www.aaai.org). All rights reserved. Learning Object Models from Appearance * Hiroshi Murase NTT Basic Research Labs 3-9-l 1 Midori-cho, Musashino-shi Tokyo
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Verification: is that a lamp? What do we mean by recognition? Recognition. Recognition
 Recognition Recognition The Margaret Thatcher Illusion, by Peter Thompson The Margaret Thatcher Illusion, by Peter Thompson Readings C. Bishop, Neural Networks for Pattern Recognition, Oxford University
Recognition Recognition The Margaret Thatcher Illusion, by Peter Thompson The Margaret Thatcher Illusion, by Peter Thompson Readings C. Bishop, Neural Networks for Pattern Recognition, Oxford University
What do we mean by recognition?
 Announcements Recognition Project 3 due today Project 4 out today (help session + photos end-of-class) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski, Chapter 14 1 Recognition What
Announcements Recognition Project 3 due today Project 4 out today (help session + photos end-of-class) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski, Chapter 14 1 Recognition What
Tracking system. Danica Kragic. Object Recognition & Model Based Tracking
 Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Face/Flesh Detection and Face Recognition
 Face/Flesh Detection and Face Recognition Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. The Viola
Face/Flesh Detection and Face Recognition Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. The Viola
MULTIVIEW REPRESENTATION OF 3D OBJECTS OF A SCENE USING VIDEO SEQUENCES
 MULTIVIEW REPRESENTATION OF 3D OBJECTS OF A SCENE USING VIDEO SEQUENCES Mehran Yazdi and André Zaccarin CVSL, Dept. of Electrical and Computer Engineering, Laval University Ste-Foy, Québec GK 7P4, Canada
MULTIVIEW REPRESENTATION OF 3D OBJECTS OF A SCENE USING VIDEO SEQUENCES Mehran Yazdi and André Zaccarin CVSL, Dept. of Electrical and Computer Engineering, Laval University Ste-Foy, Québec GK 7P4, Canada
3-D Object Recognition Using 2-D Views Wenjing Li, Member, IEEE, George Bebis, Member, IEEE, and Nikolaos G. Bourbakis, Fellow, IEEE
 2236 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 17, NO. 11, NOVEMBER 2008 3-D Object Recognition Using 2-D Views Wenjing Li, Member, IEEE, George Bebis, Member, IEEE, and Nikolaos G. Bourbakis, Fellow,
2236 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 17, NO. 11, NOVEMBER 2008 3-D Object Recognition Using 2-D Views Wenjing Li, Member, IEEE, George Bebis, Member, IEEE, and Nikolaos G. Bourbakis, Fellow,
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels
 Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Head Frontal-View Identification Using Extended LLE
 Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Head Frontal-View Identification Using Extended LLE Chao Wang Center for Spoken Language Understanding, Oregon Health and Science University Abstract Automatic head frontal-view identification is challenging
Last week. Multi-Frame Structure from Motion: Multi-View Stereo. Unknown camera viewpoints
 Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Specific Object Recognition: Matching in 2D
 Specific Object Recognition: Matching in 2D engine model Is there an engine in the image? If so, where is it located? image containing an instance of the model Alignment Use a geometric feature-based model
Specific Object Recognition: Matching in 2D engine model Is there an engine in the image? If so, where is it located? image containing an instance of the model Alignment Use a geometric feature-based model
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Photometric stereo. Recovering the surface f(x,y) Three Source Photometric stereo: Step1. Reflectance Map of Lambertian Surface
 Three Source Photometric stereo: Step1. Reflectance Map of Lambertian Surface") Photometric stereo Illumination Cones and Uncalibrated Photometric Stereo Single viewpoint, multiple images under different lighting. 1. Arbitrary known BRDF, known lighting 2. Lambertian BRDF, known lighting
Photometric stereo Illumination Cones and Uncalibrated Photometric Stereo Single viewpoint, multiple images under different lighting. 1. Arbitrary known BRDF, known lighting 2. Lambertian BRDF, known lighting
Robust Pose Estimation using the SwissRanger SR-3000 Camera
 Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
Robust Pose Estimation using the SwissRanger SR- Camera Sigurjón Árni Guðmundsson, Rasmus Larsen and Bjarne K. Ersbøll Technical University of Denmark, Informatics and Mathematical Modelling. Building,
Generalized Principal Component Analysis CVPR 2007
 Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
PCA and KPCA algorithms for Face Recognition A Survey
 PCA and KPCA algorithms for Face Recognition A Survey Surabhi M. Dhokai 1, Vaishali B.Vala 2,Vatsal H. Shah 3 1 Department of Information Technology, BVM Engineering College, surabhidhokai@gmail.com 2
PCA and KPCA algorithms for Face Recognition A Survey Surabhi M. Dhokai 1, Vaishali B.Vala 2,Vatsal H. Shah 3 1 Department of Information Technology, BVM Engineering College, surabhidhokai@gmail.com 2
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes
 Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes TDT 03 - Advanced Topics in Computer Graphics Presentation by Ruben H. Fagerli Paper to be summarized Using Spin Images for Efficient
Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes TDT 03 - Advanced Topics in Computer Graphics Presentation by Ruben H. Fagerli Paper to be summarized Using Spin Images for Efficient
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Appearance-Based Face Recognition and Light-Fields
 Appearance-Based Face Recognition and Light-Fields Ralph Gross, Iain Matthews, and Simon Baker CMU-RI-TR-02-20 Abstract Arguably the most important decision to be made when developing an object recognition
Appearance-Based Face Recognition and Light-Fields Ralph Gross, Iain Matthews, and Simon Baker CMU-RI-TR-02-20 Abstract Arguably the most important decision to be made when developing an object recognition
ESTIMATING HEAD POSE WITH AN RGBD SENSOR: A COMPARISON OF APPEARANCE-BASED AND POSE-BASED LOCAL SUBSPACE METHODS
 ESTIMATING HEAD POSE WITH AN RGBD SENSOR: A COMPARISON OF APPEARANCE-BASED AND POSE-BASED LOCAL SUBSPACE METHODS Donghun Kim, Johnny Park, and Avinash C. Kak Robot Vision Lab, School of Electrical and
ESTIMATING HEAD POSE WITH AN RGBD SENSOR: A COMPARISON OF APPEARANCE-BASED AND POSE-BASED LOCAL SUBSPACE METHODS Donghun Kim, Johnny Park, and Avinash C. Kak Robot Vision Lab, School of Electrical and
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Rain Removal in a Video Sequence
 Li Hao Qi Yingyi Zhang Xiaopeng Presentation of CS4243 Project Outline Objective 1 Objective 2 3 Objective of the project Dimming or removing the rain streaks in the video. Our observations Objective It
Li Hao Qi Yingyi Zhang Xiaopeng Presentation of CS4243 Project Outline Objective 1 Objective 2 3 Objective of the project Dimming or removing the rain streaks in the video. Our observations Objective It
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Re-rendering from a Dense/Sparse Set of Images
 Re-rendering from a Dense/Sparse Set of Images Ko Nishino Institute of Industrial Science The Univ. of Tokyo (Japan Science and Technology) kon@cvl.iis.u-tokyo.ac.jp Virtual/Augmented/Mixed Reality Three
Re-rendering from a Dense/Sparse Set of Images Ko Nishino Institute of Industrial Science The Univ. of Tokyo (Japan Science and Technology) kon@cvl.iis.u-tokyo.ac.jp Virtual/Augmented/Mixed Reality Three
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
22 October, 2012 MVA ENS Cachan. Lecture 5: Introduction to generative models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Announcements. Recognition I. Optical Flow: Where do pixels move to? dy dt. I + y. I = x. di dt. dx dt. = t
 Announcements I Introduction to Computer Vision CSE 152 Lecture 18 Assignment 4: Due Toda Assignment 5: Posted toda Read: Trucco & Verri, Chapter 10 on recognition Final Eam: Wed, 6/9/04, 11:30-2:30, WLH
Announcements I Introduction to Computer Vision CSE 152 Lecture 18 Assignment 4: Due Toda Assignment 5: Posted toda Read: Trucco & Verri, Chapter 10 on recognition Final Eam: Wed, 6/9/04, 11:30-2:30, WLH
Face detection and recognition. Many slides adapted from K. Grauman and D. Lowe
 Face detection and recognition Many slides adapted from K. Grauman and D. Lowe Face detection and recognition Detection Recognition Sally History Early face recognition systems: based on features and distances
Face detection and recognition Many slides adapted from K. Grauman and D. Lowe Face detection and recognition Detection Recognition Sally History Early face recognition systems: based on features and distances
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Modelling imprints of pharmaceutical tablets for imprint quality visual inspection
 Modelling imprints of pharmaceutical tablets for imprint quality visual inspection Miha Možina 1, Dejan Tomaževič 1,2, Franjo Pernuš 1,2 and Boštjan Likar 1,2 1 Sensum, Computer Vision Systems Tehnološki
Modelling imprints of pharmaceutical tablets for imprint quality visual inspection Miha Možina 1, Dejan Tomaževič 1,2, Franjo Pernuš 1,2 and Boštjan Likar 1,2 1 Sensum, Computer Vision Systems Tehnološki
Sensor Modalities. Sensor modality: Different modalities:
 Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
Sensor Modalities Sensor modality: Sensors which measure same form of energy and process it in similar ways Modality refers to the raw input used by the sensors Different modalities: Sound Pressure Temperature
LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING - 19-21 April 2012, Tallinn, Estonia LOCAL AND GLOBAL DESCRIPTORS FOR PLACE RECOGNITION IN ROBOTICS Shvarts, D. & Tamre, M. Abstract: The
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Shape Matching. Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007
 Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Recognition, SVD, and PCA
 Recognition, SVD, and PCA Recognition Suppose you want to find a face in an image One possibility: look for something that looks sort of like a face (oval, dark band near top, dark band near bottom) Another
Recognition, SVD, and PCA Recognition Suppose you want to find a face in an image One possibility: look for something that looks sort of like a face (oval, dark band near top, dark band near bottom) Another
images (e.g. intensity edges) using the Hausdor fraction. The technique backgrounds. We report some simple recognition experiments in which
 using the Hausdor fraction. The technique backgrounds. We report some simple recognition experiments in which") Proc. of the European Conference on Computer Vision, pages 536-545, 1996. Object Recognition Using Subspace Methods Daniel P. Huttenlocher, Ryan H. Lilien and Clark F. Olson Department of Computer Science,
Proc. of the European Conference on Computer Vision, pages 536-545, 1996. Object Recognition Using Subspace Methods Daniel P. Huttenlocher, Ryan H. Lilien and Clark F. Olson Department of Computer Science,
AN APPROACH OF SEMIAUTOMATED ROAD EXTRACTION FROM AERIAL IMAGE BASED ON TEMPLATE MATCHING AND NEURAL NETWORK
 AN APPROACH OF SEMIAUTOMATED ROAD EXTRACTION FROM AERIAL IMAGE BASED ON TEMPLATE MATCHING AND NEURAL NETWORK Xiangyun HU, Zuxun ZHANG, Jianqing ZHANG Wuhan Technique University of Surveying and Mapping,
AN APPROACH OF SEMIAUTOMATED ROAD EXTRACTION FROM AERIAL IMAGE BASED ON TEMPLATE MATCHING AND NEURAL NETWORK Xiangyun HU, Zuxun ZHANG, Jianqing ZHANG Wuhan Technique University of Surveying and Mapping,
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki
 Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Computer Vision with MATLAB MATLAB Expo 2012 Steve Kuznicki 2011 The MathWorks, Inc. 1 Today s Topics Introduction Computer Vision Feature-based registration Automatic image registration Object recognition/rotation
Rotation Invariant Image Registration using Robust Shape Matching
 International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 7, Number 2 (2014), pp. 125-132 International Research Publication House http://www.irphouse.com Rotation Invariant
International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 7, Number 2 (2014), pp. 125-132 International Research Publication House http://www.irphouse.com Rotation Invariant
output vector controller y s... y 2 y 1
 A Neuro-Fuzzy Solution for Fine-Motion Control Based on Vision and Force Sensors Yorck von Collani, Jianwei Zhang, Alois Knoll Technical Computer Science, Faculty of Technology, University of Bielefeld,
A Neuro-Fuzzy Solution for Fine-Motion Control Based on Vision and Force Sensors Yorck von Collani, Jianwei Zhang, Alois Knoll Technical Computer Science, Faculty of Technology, University of Bielefeld,
Image-Based Face Recognition using Global Features
 Image-Based Face Recognition using Global Features Xiaoyin xu Research Centre for Integrated Microsystems Electrical and Computer Engineering University of Windsor Supervisors: Dr. Ahmadi May 13, 2005
Image-Based Face Recognition using Global Features Xiaoyin xu Research Centre for Integrated Microsystems Electrical and Computer Engineering University of Windsor Supervisors: Dr. Ahmadi May 13, 2005
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Simultaneous surface texture classification and illumination tilt angle prediction
 Simultaneous surface texture classification and illumination tilt angle prediction X. Lladó, A. Oliver, M. Petrou, J. Freixenet, and J. Martí Computer Vision and Robotics Group - IIiA. University of Girona
Simultaneous surface texture classification and illumination tilt angle prediction X. Lladó, A. Oliver, M. Petrou, J. Freixenet, and J. Martí Computer Vision and Robotics Group - IIiA. University of Girona
Facial Expression Detection Using Implemented (PCA) Algorithm
 Algorithm") Facial Expression Detection Using Implemented (PCA) Algorithm Dileep Gautam (M.Tech Cse) Iftm University Moradabad Up India Abstract: Facial expression plays very important role in the communication with
Facial Expression Detection Using Implemented (PCA) Algorithm Dileep Gautam (M.Tech Cse) Iftm University Moradabad Up India Abstract: Facial expression plays very important role in the communication with
Dimension Reduction of Image Manifolds
 Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Dimension Reduction of Image Manifolds Arian Maleki Department of Electrical Engineering Stanford University Stanford, CA, 9435, USA E-mail: arianm@stanford.edu I. INTRODUCTION Dimension reduction of datasets
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
Object and Action Detection from a Single Example
 Object and Action Detection from a Single Example Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Hae Jong Seo AFOSR Program Review, June 4-5, 29 Take a look at this:
Object and Action Detection from a Single Example Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Hae Jong Seo AFOSR Program Review, June 4-5, 29 Take a look at this:
Lecture 2 Image Processing and Filtering
 Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Short Survey on Static Hand Gesture Recognition
 Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model
 Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
COMP 102: Computers and Computing
 COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
Hierarchical Building Recognition
 Hierarchical Building Recognition Anonymous Abstract We propose a novel and efficient method for recognition of buildings and locations with dominant man-made structures. The method exploits two different
Hierarchical Building Recognition Anonymous Abstract We propose a novel and efficient method for recognition of buildings and locations with dominant man-made structures. The method exploits two different
Image Coding with Active Appearance Models
 Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Linear Discriminant Analysis in Ottoman Alphabet Character Recognition
 Linear Discriminant Analysis in Ottoman Alphabet Character Recognition ZEYNEB KURT, H. IREM TURKMEN, M. ELIF KARSLIGIL Department of Computer Engineering, Yildiz Technical University, 34349 Besiktas /
Linear Discriminant Analysis in Ottoman Alphabet Character Recognition ZEYNEB KURT, H. IREM TURKMEN, M. ELIF KARSLIGIL Department of Computer Engineering, Yildiz Technical University, 34349 Besiktas /
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Object Recognition. Lecture 11, April 21 st, Lexing Xie. EE4830 Digital Image Processing
 Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER
 MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER A.Shabbir 1, 2 and G.Verdoolaege 1, 3 1 Department of Applied Physics, Ghent University, B-9000 Ghent, Belgium 2 Max Planck Institute
MULTIVARIATE TEXTURE DISCRIMINATION USING A PRINCIPAL GEODESIC CLASSIFIER A.Shabbir 1, 2 and G.Verdoolaege 1, 3 1 Department of Applied Physics, Ghent University, B-9000 Ghent, Belgium 2 Max Planck Institute
Announcements. Stereo Vision Wrapup & Intro Recognition
 Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Announcements Stereo Vision Wrapup & Intro Introduction to Computer Vision CSE 152 Lecture 17 HW3 due date postpone to Thursday HW4 to posted by Thursday, due next Friday. Order of material we ll first
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
STATISTICS AND ANALYSIS OF SHAPE
 Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Model-Based Stereo. Chapter Motivation. The modeling system described in Chapter 5 allows the user to create a basic model of a
 96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
Applications Video Surveillance (On-line or off-line)
") Face Face Recognition: Dimensionality Reduction Biometrics CSE 190-a Lecture 12 CSE190a Fall 06 CSE190a Fall 06 Face Recognition Face is the most common biometric used by humans Applications range from
Face Face Recognition: Dimensionality Reduction Biometrics CSE 190-a Lecture 12 CSE190a Fall 06 CSE190a Fall 06 Face Recognition Face is the most common biometric used by humans Applications range from
Using Spin-Images for Efficient Object Recognition in Cluttered 3-D Scenes
 Using Spin-Images for Efficient Object Recognition in Cluttered 3-D Scenes Andrew E. Johnson Martial Hebert Jet Propulsion Laboratory The Robotics Institute Mail Stop 107-102 Carnegie Mellon University
Using Spin-Images for Efficient Object Recognition in Cluttered 3-D Scenes Andrew E. Johnson Martial Hebert Jet Propulsion Laboratory The Robotics Institute Mail Stop 107-102 Carnegie Mellon University
Principal Component Analysis (PCA) is a most practicable. statistical technique. Its application plays a major role in many
 is a most practicable. statistical technique. Its application plays a major role in many") CHAPTER 3 PRINCIPAL COMPONENT ANALYSIS ON EIGENFACES 2D AND 3D MODEL 3.1 INTRODUCTION Principal Component Analysis (PCA) is a most practicable statistical technique. Its application plays a major role
CHAPTER 3 PRINCIPAL COMPONENT ANALYSIS ON EIGENFACES 2D AND 3D MODEL 3.1 INTRODUCTION Principal Component Analysis (PCA) is a most practicable statistical technique. Its application plays a major role
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
GEOG 4110/5100 Advanced Remote Sensing Lecture 4
 GEOG 4110/5100 Advanced Remote Sensing Lecture 4 Geometric Distortion Relevant Reading: Richards, Sections 2.11-2.17 Geometric Distortion Geometric Distortion: Errors in image geometry, (location, dimensions,
GEOG 4110/5100 Advanced Remote Sensing Lecture 4 Geometric Distortion Relevant Reading: Richards, Sections 2.11-2.17 Geometric Distortion Geometric Distortion: Errors in image geometry, (location, dimensions,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2013 TTh 17:30-18:45 FDH 204 Lecture 18 130404 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Object Recognition Intro (Chapter 14) Slides from
EE795: Computer Vision and Intelligent Systems Spring 2013 TTh 17:30-18:45 FDH 204 Lecture 18 130404 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Object Recognition Intro (Chapter 14) Slides from
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object. Radiance. Viewpoint v
 Fisher Light-Fields for Face Recognition Across Pose and Illumination Ralph Gross, Iain Matthews, and Simon Baker The Robotics Institute, Carnegie Mellon University 5000 Forbes Avenue, Pittsburgh, PA 15213
Fisher Light-Fields for Face Recognition Across Pose and Illumination Ralph Gross, Iain Matthews, and Simon Baker The Robotics Institute, Carnegie Mellon University 5000 Forbes Avenue, Pittsburgh, PA 15213
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Factorization Method Using Interpolated Feature Tracking via Projective Geometry
 Factorization Method Using Interpolated Feature Tracking via Projective Geometry Hideo Saito, Shigeharu Kamijima Department of Information and Computer Science, Keio University Yokohama-City, 223-8522,
Factorization Method Using Interpolated Feature Tracking via Projective Geometry Hideo Saito, Shigeharu Kamijima Department of Information and Computer Science, Keio University Yokohama-City, 223-8522,
Announcement. Lighting and Photometric Stereo. Computer Vision I. Surface Reflectance Models. Lambertian (Diffuse) Surface.
 Surface.") Lighting and Photometric Stereo CSE252A Lecture 7 Announcement Read Chapter 2 of Forsyth & Ponce Might find section 12.1.3 of Forsyth & Ponce useful. HW Problem Emitted radiance in direction f r for incident
Lighting and Photometric Stereo CSE252A Lecture 7 Announcement Read Chapter 2 of Forsyth & Ponce Might find section 12.1.3 of Forsyth & Ponce useful. HW Problem Emitted radiance in direction f r for incident
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
On-line, Incremental Learning of a Robust Active Shape Model
 On-line, Incremental Learning of a Robust Active Shape Model Michael Fussenegger 1, Peter M. Roth 2, Horst Bischof 2, Axel Pinz 1 1 Institute of Electrical Measurement and Measurement Signal Processing
On-line, Incremental Learning of a Robust Active Shape Model Michael Fussenegger 1, Peter M. Roth 2, Horst Bischof 2, Axel Pinz 1 1 Institute of Electrical Measurement and Measurement Signal Processing
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 2, June 2016, Page 8. Face recognition attendance system based on PCA approach
 Computer Aided Drafting, Design and Manufacturing Volume 6, Number, June 016, Page 8 CADDM Face recognition attendance system based on PCA approach Li Yanling 1,, Chen Yisong, Wang Guoping 1. Department
Computer Aided Drafting, Design and Manufacturing Volume 6, Number, June 016, Page 8 CADDM Face recognition attendance system based on PCA approach Li Yanling 1,, Chen Yisong, Wang Guoping 1. Department
3D Object Recognition using Multiclass SVM-KNN
 3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
3D Object Recognition using Multiclass SVM-KNN R. Muralidharan, C. Chandradekar April 29, 2014 Presented by: Tasadduk Chowdhury Problem We address the problem of recognizing 3D objects based on various
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.