Embedding OS in AVR microcontrollers. Prof. Prabhat Ranjan DA-IICT, Gandhinagar
|
|
|
- Pamela Shaw
- 5 years ago
- Views:
Transcription
1 Embedding OS in AVR microcontrollers Prof. Prabhat Ranjan DA-IICT, Gandhinagar
2 Operating System Fundamentals The kernel is the core component within an operating system Operating systems such as Linux employ kernels that allow users access to the computer seemingly simultaneously Multiple users can execute multiple programs apparently concurrently Each executing program is a task under control of the operating system. If an operating system can execute multiple tasks in this manner it is said to be multitasking.
3 Why use multitasking OS? The use of a multitasking operating system can simplify the design of what would otherwise be a complex software application: The multitasking and inter-task communications features of the operating system allow the complex application to be partitioned into a set of smaller and more manageable tasks. The partitioning can result in easier software testing, work breakdown within teams, and code reuse. Complex timing and sequencing details can be removed from the application code and become the responsibility of the operating system
4 Multitasking Vs Concurrency A conventional processor can only execute a single task at a time - but by rapidly switching between tasks a multitasking operating system can make it appear as if each task is executing concurrently.
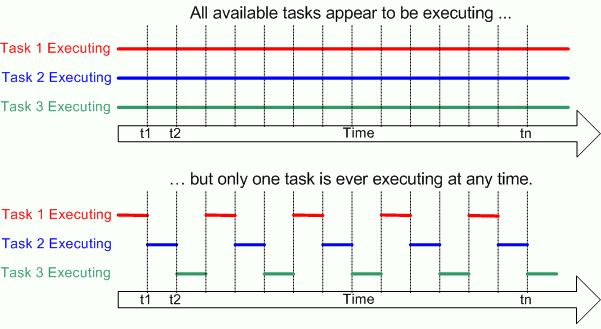
5
6 Scheduling The scheduler is the part of the kernel responsible for deciding which task should be executing at any particular time. The kernel can suspend and later resume a task many times during the task lifetime. The scheduling policy is the algorithm used by the scheduler to decide which task to execute at any point in time. The policy of a (non real time) multi user system will most likely allow each task a "fair" proportion of processor time. The policy used in real time / embedded systems is described later
7
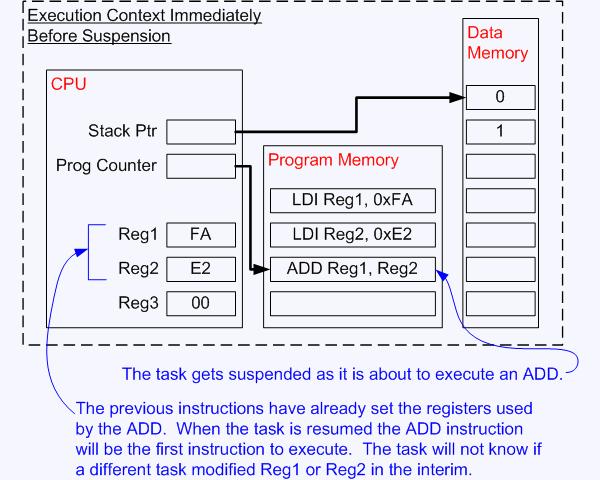
8 Context Switching As a task executes it utilizes the processor / microcontroller registers and accesses RAM and ROM just as any other program. These resources together (the processor registers, stack, etc.) comprise the task execution context A task is a sequential piece of code - it does not know when it is going to get suspended or resumed by the kernel and does not even know when this has happened
9
10 To prevent this type of error it is essential that upon resumption a task has a context identical to that immediately prior to its suspension. Kernel is responsible for ensuring this - and does so by saving the context of a task as it is suspended. When the task is resumed its saved context is restored by the operating system kernel prior to its execution. Process of saving the context of a task being suspended and restoring at resumption is called context switching.
11 Real Time Applications Real time operating systems (RTOS's) objectives are very different to those of non real time systems The different objective is reflected in the scheduling policy Real time / embedded systems are designed to provide a timely response to real world events Events occurring in the real world can have deadlines before which the real time / embedded system must respond and the RTOS scheduling policy must ensure these
12 Real Time Applications To achieve this objective assign a priority to each task The scheduling policy of the RTOS is to ensure that the highest priority task (that is able to execute) is given processing time This may require sharing processing time "fairly" between tasks of equal priority if they are ready to run simultaneously
13 RT Example Basic example of this is a real time system that incorporates a keypad and LCD. A user must get visual feedback of each key press within a reasonable period - if the user cannot see that the key press has been accepted within this period the software product will at best be awkward to use. If the longest acceptable period was 100ms - any response between 0 and 100ms would be acceptable.
14 Now assume the real time system is also performing a control function that relies on a digitally filtered input. The input must be sampled, filtered and the control cycle executed every 2ms. For correct operation of the filter the temporal regularity of the sample must be accurate to 0.5ms.
15
16 FreeRTOS Features Choice of RTOS scheduling policy Pre-emptive: Always runs the highest available task. Tasks of identical priority share CPU time (fully pre-emptive with round robin time slicing). Cooperative: Context switches only occur if a task blocks, or explicitly calls taskyield(). Message queues Semaphores [via macros] Trace visualisation ability Majority of source code common to all supported development tools
17 Design Philosophy Nearly all the code is written in C, with only a few assembler functions where completely unavoidable. The RTOS kernel uses multiple priority lists. This provides maximum application design flexibility. Any number of tasks can share the same priority. Simple, Portable, Concise
18 Naming Conventions Variables Variables of type char are prefixed c Variables of type short are prefixed s Variables of type long are prefixed l Variables of type float are prefixed f Variables of type double are prefixed d Enumerated variables are prefixed e Other types (e.g. structs) are prefixed x Pointers have an additional prefixed p, for example a pointer to a short will have prefix ps Unsigned variables have an additional prefixed u, for example an unsigned short will have prefix us
19 Functions File private functions are prefixed with prv API functions are prefixed with their return type, as per the convention defined for variables Function names start with the file in which they are defined. For example vtaskdelete is defined in task.c Data Types Data types are not directly referenced within the RTOS kernel source code each port has it's own set of definitions. char type is #defined to portchar short data type is #defined to portshort
20 Application Programming Interface(API)
21 API Groups Task Creation Task Control Kernel Control Task Utilities Queue Management Semaphores Customization
22 Task Creation xtaskcreate - Create a new task and add it to the list of tasks that are ready to run vtaskdelete - Remove a task from the RTOS real time kernels management. The task being deleted will be removed from all ready, blocked, suspended and event lists
23 Task Control vtaskdelay - Delay a task for a given number of ticks vtaskdelayuntil - Delay a task until a specified time uctaskpriorityget - Obtain the priority of any task vtaskpriorityset - Set the priority of any task vtasksuspend - Suspend any task vtaskresume - Resumes a suspended task
24 Kernel Control vtaskstartscheduler - Starts the real time kernel tick processing. After calling the kernel has control over which tasks are executed and when. vtaskendscheduler - Stops the real time kernel tick. All created tasks will be automatically deleted and multitasking (either preemptive or cooperative) will stop. Execution then resumes from the point where vtaskstartscheduler() was called, as if vtaskstartscheduler() had just returned
25 vtasksuspendall - Suspends all real time kernel activity while keeping interrupts (including the kernel tick) enabled xtaskresumeall - Resumes real time kernel activity following a call to vtasksuspendall (). After a call to xtaskresumeall () the kernel will take control of which task is executing at any time
26 Task Utilities xtaskgettickcount - count of ticks since vtaskstartscheduler was called xtaskgetnumberoftasks - number of tasks that the real time kernel is currently managing vtasklist - Lists all the current tasks
27 Queue Management xqueuecreate - Creates a new queue instance xqueuesend - Post an item on a queue xqueuereceive - Receive an item from a queue xqueuesendfromisr - Post an item on a queue(safe from isr) xqueuereceivefromisr - Receive an item from a queue (safe from ISR)
28 Semaphores vsemaphorecreatebinary xsemaphoretake xsemaphoregive xsemaphoregivefromisr
29 Customization FreeRTOS/Demo/AVR_ATMega323_Win AVR/FreeRTOSConfig.h portuse_preemption 1 portcpu_clock_hz ( ( unsigned portlong ) ) porttick_rate_hz ( ( portticktype ) 1000 ) portmax_priorities ( ( unsigned portchar ) 4 )
30 configcpu_clock_hz Enter the frequency in Hz at which the internal processor core will be executing. This value is required in order to correctly configure timer peripherals.(xtal ) configtick_rate_hz frequency of the RTOS tick interrupt tick interrupt is used to measure time a higher tick frequency means time can be measured to a higher resolution
31 TICK_RATE high tick frequency -> kernel will use more CPU time so be less efficient RTOS demo applications all use a tick rate of 1000Hz. This is used to test the kernel and is higher than would normally be required. More than one task can share the same priority. The kernel will share processor time between tasks of the same priority by switching between the tasks during each RTOS tick. A high tick rate frequency will therefore also have the effect of reducing the 'time slice' given to each task.
32 configmax_priorities The number of priorities available to the application Any number of tasks can share the same priority Each available priority consumes RAM within the kernel so this value should not be set any higher than actually required by your application
33 INCLUDE Parameters The macros starting 'INCLUDE' allow those components of the real time kernel not utilized by application to be excluded from build Ensures the RTOS does not use any more ROM or RAM than necessary #define INCLUDE_vTaskDelete 1 (change to 0 to exclude)
34 DEMO APPLICATION

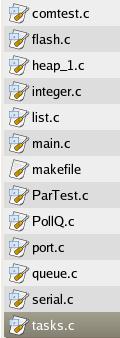
35 Source Directory Structure : contains real time kernel source code

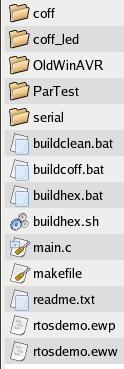
36 Demo Dir Structure
37 Demo files flash.c Creates upto eight tasks, each of which flash an LED at a different rate. The first LED flashes every 125ms, the second every 250ms, the third every 375ms, etc. The LED flash tasks provide instant visual feedback. They show that the scheduler is still operational. On AVR, by default, PORT B is used
38 comtest.c Creates two tasks that operate on an interrupt driven serial port. A loopback connector should be used so that everything that is transmitted is also received. Rx/Tx should be shorted. The first task repeatedly sends a string to a queue, character at a time. The serial port interrupt will empty the queue and transmit the characters. The task blocks for a pseudo random period before resending the string.
39 blockq.c Creates six tasks that operate on three queues as follows: The first two tasks send and receive an incrementing number to/from a queue. One task acts as a producer and the other as the consumer. The consumer is a higher priority than the producer and is set to block on queue reads. The queue only has space for one item - as soon as the producer posts a message on the queue the consumer will unblock, preempt the producer, and remove the item.
40 The second two tasks work the other way around. Again the queue used only has enough space for one item. This time the consumer has a lower priority than the producer. The producer will try to post on the queue blocking when the queue is full. When the consumer wakes it will remove the item from the queue, causing the producer to unblock, pre-empt the consumer, and immediately re-fill the queue.
41 The last two tasks use the same queue producer and consumer functions. This time the queue has enough space for lots of items and the tasks operate at the same priority. The producer will execute, placing items into the queue. The consumer will start executing when either the queue becomes full (causing the producer to block) or a context switch occurs (tasks of the same priority will time slice).
42 death.c Create a single persistent task which periodically dynamically creates another four tasks. The original task is called the creator task, the four tasks it creates are called suicidal tasks. Two of the created suicidal tasks kill one other suicidal task before killing themselves - leaving just the original task remaining.
43 The creator task must be spawned after all of the other demo application tasks as it keeps a check on the number of tasks under the scheduler control. The number of tasks it expects to see running should never be greater than the number of tasks that were in existence when the creator task was spawned, plus one set of four suicidal tasks. If this number is exceeded an error is flagged.
44 flop.c Creates eight tasks, each of which loops continuously performing an (emulated) floating point calculation. All the tasks run at the idle priority and never block or yield. This causes all eight tasks to time slice with the idle task. Running at the idle priority means that these tasks will get pre-empted any time another task is ready to run or a time slice occurs. More often than not the pre-emption will occur mid calculation, creating a good test of the schedulers context switch mechanism - a calculation producing an unexpected result could be a symptom of a corruption in the context of a task.
45 integer.c This does the same as flop.c, but uses variables of type long instead of type double. As with flop.c, the tasks created in this file are a good test of the scheduler context switch mechanism. The processor has to access 32-bit variables in two or four chunks (depending on the processor). The low priority of these tasks means there is a high probability that a context switch will occur mid calculation.
46 pollq.c This is a very simple queue test. BlockQ.c is a more comprehensive version. Creates two tasks that communicate over a single queue. One task acts as a producer, the other a consumer.
47 main.c It creates all the various tasks One task check keeps a track of all the tasks and stops flashing the LED, if any task gives error LED 0-2, flashes as per tasks in flash.c LED 4-5 flashes as per serial communication Tx/Rx Comment various tasks and try to see the effect. Try to create a new task by yourself
48 Thank you
Software Development with an Open Source RTOS
 Software Development with an Open Source RTOS Fatih Peksenar - Sr. Manager, Application Engineering Class ID: 9L02I Renesas Electronics America Inc. Mr. Fatih Peksenar Manager, Applications Engineering
Software Development with an Open Source RTOS Fatih Peksenar - Sr. Manager, Application Engineering Class ID: 9L02I Renesas Electronics America Inc. Mr. Fatih Peksenar Manager, Applications Engineering
Using the FreeRTOS Real Time Kernel
 Using the FreeRTOS Real Time Kernel i ii Using the FreeRTOS Real Time Kernel Renesas RX600 Edition Richard Barry iii First edition published 2011. All text, source code and diagrams are the exclusive property
Using the FreeRTOS Real Time Kernel i ii Using the FreeRTOS Real Time Kernel Renesas RX600 Edition Richard Barry iii First edition published 2011. All text, source code and diagrams are the exclusive property
Using the FreeRTOS Real Time Kernel
 Using the FreeRTOS Real Time Kernel NXP LPC17xx Edition Richard Barry iii Contents List of Figures... vi List of Code Listings... viii List of Tables... xi List of Notation... xii Preface FreeRTOS and
Using the FreeRTOS Real Time Kernel NXP LPC17xx Edition Richard Barry iii Contents List of Figures... vi List of Code Listings... viii List of Tables... xi List of Notation... xii Preface FreeRTOS and
FreeRTOS. Alberto Bosio. February 27, Université de Montpellier Alberto Bosio (UM) FreeRTOS February 27, / 52
 FreeRTOS February 27, / 52") FreeRTOS Alberto Bosio Université de Montpellier bosio@lirmm.fr February 27, 2017 Alberto Bosio (UM) FreeRTOS February 27, 2017 1 / 52 Outlook 1 Introduction 2 Task Management 3 Scheduler 4 Queue Management
FreeRTOS Alberto Bosio Université de Montpellier bosio@lirmm.fr February 27, 2017 Alberto Bosio (UM) FreeRTOS February 27, 2017 1 / 52 Outlook 1 Introduction 2 Task Management 3 Scheduler 4 Queue Management
Content. Task management Task communication Message queues Task synchronization Binary semaphores Counting semaphores Mutexes
 FreeRTOS Content Task management Task communication Message queues Task synchronization Binary semaphores Counting semaphores Mutexes Task management portbase_type xtaskcreate( pdtask_code pvtaskcode,
FreeRTOS Content Task management Task communication Message queues Task synchronization Binary semaphores Counting semaphores Mutexes Task management portbase_type xtaskcreate( pdtask_code pvtaskcode,
FreeRTOS. A Brief Overview. Christopher Kenna. October 1, Avionics. FreeRTOS 1 / 34
 A Brief Overview Christopher Kenna Avionics October 1, 2010 1 / 34 Introduction Outline 1 Introduction About Kernel Overview 2 Tasks Tasks versus Co-Routines Task Details 3 IPC and Synchronization Queues
A Brief Overview Christopher Kenna Avionics October 1, 2010 1 / 34 Introduction Outline 1 Introduction About Kernel Overview 2 Tasks Tasks versus Co-Routines Task Details 3 IPC and Synchronization Queues
An Analysis and Description of the Inner Workings of the FreeRTOS Kernel
 Carleton University Department of Systems and Computer Engineering SYSC5701: Operating System Methods for Real-Time Applications An Analysis and Description of the Inner Workings of the FreeRTOS Kernel
Carleton University Department of Systems and Computer Engineering SYSC5701: Operating System Methods for Real-Time Applications An Analysis and Description of the Inner Workings of the FreeRTOS Kernel
FreeRTOS. A Brief Overview. Christopher Kenna. October 1, Avionics. FreeRTOS 1 / 34
 FreeRTOS A Brief Overview Christopher Kenna Avionics October 1, 2010 FreeRTOS 1 / 34 Background Information The FreeRTOS Project supports 25 official architecture ports, with many more community developed
FreeRTOS A Brief Overview Christopher Kenna Avionics October 1, 2010 FreeRTOS 1 / 34 Background Information The FreeRTOS Project supports 25 official architecture ports, with many more community developed
FreeRTOS - Common Task Design Patterns in Multi-tasking Applications
 FreeRTOS - Common Task Design Patterns in Multi-tasking Applications Richard Barry, Founder Real Time Engineers Ltd. Class ID: 9C11L Renesas Electronics America Inc. 2012 Renesas Electronics America Inc.
FreeRTOS - Common Task Design Patterns in Multi-tasking Applications Richard Barry, Founder Real Time Engineers Ltd. Class ID: 9C11L Renesas Electronics America Inc. 2012 Renesas Electronics America Inc.
Embedded Systems - FS 2018
 Institut für Technische Informatik und Kommunikationsnetze Prof. L. Thiele Embedded Systems - FS 2018 Sample solution to Lab 3 Date : 18.4.2018 Tasks in a real-time operating system Goals of this Session
Institut für Technische Informatik und Kommunikationsnetze Prof. L. Thiele Embedded Systems - FS 2018 Sample solution to Lab 3 Date : 18.4.2018 Tasks in a real-time operating system Goals of this Session
Embedded Systems. 5. Operating Systems. Lothar Thiele. Computer Engineering and Networks Laboratory
 Embedded Systems 5. Operating Systems Lothar Thiele Computer Engineering and Networks Laboratory Embedded Operating Systems 5 2 Embedded Operating System (OS) Why an operating system (OS) at all? Same
Embedded Systems 5. Operating Systems Lothar Thiele Computer Engineering and Networks Laboratory Embedded Operating Systems 5 2 Embedded Operating System (OS) Why an operating system (OS) at all? Same
Contents. List of Figures... vi. List of Code Listings... viii. List of Tables... xi. List of Notation... xii
 Contents List of Figures... vi List of Code Listings... viii List of Tables... xi List of Notation... xii Preface FreeRTOS and the Cortex-M3... 1 Multitasking on a Cortex-M3 Microcontroller... 2 An Introduction
Contents List of Figures... vi List of Code Listings... viii List of Tables... xi List of Notation... xii Preface FreeRTOS and the Cortex-M3... 1 Multitasking on a Cortex-M3 Microcontroller... 2 An Introduction
SAFERTOS. User s Manual
 SAFERTOS User s Manual SAFERTOS-UM-01 Copyright 2009 Texas Instruments and WA&S Ltd 2009 Copyright Copyright 2009 Texas Instruments, Inc. All rights reserved. Stellaris and StellarisWare are registered
SAFERTOS User s Manual SAFERTOS-UM-01 Copyright 2009 Texas Instruments and WA&S Ltd 2009 Copyright Copyright 2009 Texas Instruments, Inc. All rights reserved. Stellaris and StellarisWare are registered
 UNIT -3 PROCESS AND OPERATING SYSTEMS 2marks 1. Define Process? Process is a computational unit that processes on a CPU under the control of a scheduling kernel of an OS. It has a process structure, called
UNIT -3 PROCESS AND OPERATING SYSTEMS 2marks 1. Define Process? Process is a computational unit that processes on a CPU under the control of a scheduling kernel of an OS. It has a process structure, called
Micrium µc/os II RTOS Introduction EE J. E. Lumpp
 Micrium µc/os II RTOS Introduction (by Jean Labrosse) EE599 001 Fall 2012 J. E. Lumpp μc/os II μc/os II is a highly portable, ROMable, very scalable, preemptive real time, deterministic, multitasking kernel
Micrium µc/os II RTOS Introduction (by Jean Labrosse) EE599 001 Fall 2012 J. E. Lumpp μc/os II μc/os II is a highly portable, ROMable, very scalable, preemptive real time, deterministic, multitasking kernel
Atmel AT13723:Getting Started with FreeRTOS on Atmel SAMV/S/E MCUs. Introduction. SMART ARM-based Microcontrollers APPLICATION NOTE
 SMART ARM-based Microcontrollers Atmel AT13723:Getting Started with FreeRTOS on Atmel SAMV/S/E MCUs APPLICATION NOTE Introduction This application note illustrates the basic functionality of the FreeRTOS
SMART ARM-based Microcontrollers Atmel AT13723:Getting Started with FreeRTOS on Atmel SAMV/S/E MCUs APPLICATION NOTE Introduction This application note illustrates the basic functionality of the FreeRTOS
Using the FreeRTOS Real Time Kernel ARM Cortex-M3 Edition
 Using the FreeRTOS Real Time Kernel ARM Cortex-M3 Edition Richard Barry i Version 1.3.2. All text, source code and diagrams are the exclusive property of Real Time Engineers Ltd. Distribution or publication
Using the FreeRTOS Real Time Kernel ARM Cortex-M3 Edition Richard Barry i Version 1.3.2. All text, source code and diagrams are the exclusive property of Real Time Engineers Ltd. Distribution or publication
Queue Management. LS 12, TU Dortmund
 Queue Management (slides are based on Prof. Dr. Jian-Jia Chen and http://www.freertos.org) Anas Toma LS 12, TU Dortmund November 23, 2017 Anas Toma (LS 12, TU Dortmund) 1 / 25 Introduction What is A Queue?
Queue Management (slides are based on Prof. Dr. Jian-Jia Chen and http://www.freertos.org) Anas Toma LS 12, TU Dortmund November 23, 2017 Anas Toma (LS 12, TU Dortmund) 1 / 25 Introduction What is A Queue?
APPLICATION NOTE. AT04056: Getting Started with FreeRTOS on Atmel SAM Flash MCUs. Atmel SMART. Introduction
 APPLICATION NOTE AT04056: Getting Started with FreeRTOS on Atmel SAM Flash MCUs Atmel SMART Introduction This application note illustrates the basic functionality of the FreeRTOS Real Time Operating System
APPLICATION NOTE AT04056: Getting Started with FreeRTOS on Atmel SAM Flash MCUs Atmel SMART Introduction This application note illustrates the basic functionality of the FreeRTOS Real Time Operating System
What s An OS? Cyclic Executive. Interrupts. Advantages Simple implementation Low overhead Very predictable
 What s An OS? Provides environment for executing programs Process abstraction for multitasking/concurrency scheduling Hardware abstraction layer (device drivers) File systems Communication Do we need an
What s An OS? Provides environment for executing programs Process abstraction for multitasking/concurrency scheduling Hardware abstraction layer (device drivers) File systems Communication Do we need an
Refinement-based Verification of FreeRTOS in VCC 1
 Refinement-based Verification of FreeRTOS in VCC 1 Sumesh Divakaran Department of Computer Science Government Engineering College Idukki 11 December 2017, ACM Winter School in SE @ TCS, Pune 1 PhD work
Refinement-based Verification of FreeRTOS in VCC 1 Sumesh Divakaran Department of Computer Science Government Engineering College Idukki 11 December 2017, ACM Winter School in SE @ TCS, Pune 1 PhD work
Real-Time Programming
 Real-Time Programming Week 7: Real-Time Operating Systems Instructors Tony Montiel & Ken Arnold rtp@hte.com 4/1/2003 Co Montiel 1 Objectives o Introduction to RTOS o Event Driven Systems o Synchronization
Real-Time Programming Week 7: Real-Time Operating Systems Instructors Tony Montiel & Ken Arnold rtp@hte.com 4/1/2003 Co Montiel 1 Objectives o Introduction to RTOS o Event Driven Systems o Synchronization
Lesson FreeRTOS + LPC17xx. FreeRTOS & Tasks LPC17xx Memory Map Lab Assignment: FreeRTOS Tasks
 Lesson FreeRTOS + LPC17xx FreeRTOS & Tasks LPC17xx Memory Map Lab Assignment: FreeRTOS Tasks FreeRTOS & Tasks Introduction to FreeRTOS Objective To introduce what, why, when, and how to use Real Time Operating
Lesson FreeRTOS + LPC17xx FreeRTOS & Tasks LPC17xx Memory Map Lab Assignment: FreeRTOS Tasks FreeRTOS & Tasks Introduction to FreeRTOS Objective To introduce what, why, when, and how to use Real Time Operating
SMD149 - Operating Systems
 SMD149 - Operating Systems Roland Parviainen November 3, 2005 1 / 45 Outline Overview 2 / 45 Process (tasks) are necessary for concurrency Instance of a program in execution Next invocation of the program
SMD149 - Operating Systems Roland Parviainen November 3, 2005 1 / 45 Outline Overview 2 / 45 Process (tasks) are necessary for concurrency Instance of a program in execution Next invocation of the program
AC OB S. Multi-threaded FW framework (OS) for embedded ARM systems Torsten Jaekel, June 2014
 for embedded ARM systems Torsten Jaekel, June 2014") AC OB S Multi-threaded FW framework (OS) for embedded ARM systems Torsten Jaekel, June 2014 ACOBS ACtive OBject (operating) System Simplified FW System for Multi-Threading on ARM embedded systems ACOBS
AC OB S Multi-threaded FW framework (OS) for embedded ARM systems Torsten Jaekel, June 2014 ACOBS ACtive OBject (operating) System Simplified FW System for Multi-Threading on ARM embedded systems ACOBS
REAL-TIME MULTITASKING KERNEL FOR IBM-BASED MICROCOMPUTERS
 Malaysian Journal of Computer Science, Vol. 9 No. 1, June 1996, pp. 12-17 REAL-TIME MULTITASKING KERNEL FOR IBM-BASED MICROCOMPUTERS Mohammed Samaka School of Computer Science Universiti Sains Malaysia
Malaysian Journal of Computer Science, Vol. 9 No. 1, June 1996, pp. 12-17 REAL-TIME MULTITASKING KERNEL FOR IBM-BASED MICROCOMPUTERS Mohammed Samaka School of Computer Science Universiti Sains Malaysia
Lecture 3: Concurrency & Tasking
 Lecture 3: Concurrency & Tasking 1 Real time systems interact asynchronously with external entities and must cope with multiple threads of control and react to events - the executing programs need to share
Lecture 3: Concurrency & Tasking 1 Real time systems interact asynchronously with external entities and must cope with multiple threads of control and react to events - the executing programs need to share
GLOSSARY. VisualDSP++ Kernel (VDK) User s Guide B-1
 User s Guide B-1") B GLOSSARY Application Programming Interface (API) A library of C/C++ functions and assembly macros that define VDK services. These services are essential for kernel-based application programs. The services
B GLOSSARY Application Programming Interface (API) A library of C/C++ functions and assembly macros that define VDK services. These services are essential for kernel-based application programs. The services
FreeRTOS X. Task Notifications Semaphores Family Critical Section FreeRTOS Producer Consumer Tasks
 FreeRTOS X Task Notifications Semaphores Family Critical Section FreeRTOS Producer Consumer Tasks Task Notifications Semaphores Family Binary Semaphore Counting Semaphore Mutex Recursive Mutex Critical
FreeRTOS X Task Notifications Semaphores Family Critical Section FreeRTOS Producer Consumer Tasks Task Notifications Semaphores Family Binary Semaphore Counting Semaphore Mutex Recursive Mutex Critical
RTOS Real T i Time me Operating System System Concepts Part 2
 RTOS Real Time Operating System Concepts Part 2 Real time System Pitfalls - 4: The Ariane 5 satelite launch rocket Rocket self destructed in 4 June -1996. Exactly after 40 second of lift off at an attitude
RTOS Real Time Operating System Concepts Part 2 Real time System Pitfalls - 4: The Ariane 5 satelite launch rocket Rocket self destructed in 4 June -1996. Exactly after 40 second of lift off at an attitude
FreeRTOS Kernel: Reference Manual
 FreeRTOS Kernel Reference Manual FreeRTOS Kernel: Reference Manual Copyright 2018 Amazon Web Services, Inc. and/or its affiliates. All rights reserved. Amazon's trademarks and trade dress may not be used
FreeRTOS Kernel Reference Manual FreeRTOS Kernel: Reference Manual Copyright 2018 Amazon Web Services, Inc. and/or its affiliates. All rights reserved. Amazon's trademarks and trade dress may not be used
Introduction to Real-Time Systems and Multitasking. Microcomputer Architecture and Interfacing Colorado School of Mines Professor William Hoff
 Introduction to Real-Time Systems and Multitasking Real-time systems Real-time system: A system that must respond to signals within explicit and bounded time requirements Categories Soft real-time system:
Introduction to Real-Time Systems and Multitasking Real-time systems Real-time system: A system that must respond to signals within explicit and bounded time requirements Categories Soft real-time system:
FreeRTOS and LPC Microcontrollers. Richard Barry Design West, San Jose, 2013
 FreeRTOS and LPC Microcontrollers Richard Barry Design West, San Jose, 2013 Introductions Real Time Engineers Ltd. FreeRTOS FreeRTOS+ WITTENSTEIN high integrity systems OpenRTOS SafeRTOS Richard Barry
FreeRTOS and LPC Microcontrollers Richard Barry Design West, San Jose, 2013 Introductions Real Time Engineers Ltd. FreeRTOS FreeRTOS+ WITTENSTEIN high integrity systems OpenRTOS SafeRTOS Richard Barry
Preemptive Scheduling
 Preemptive Scheduling Lecture 18 18-1 Big Picture Methods learned so far We ve been using a foreground/background system Interrupt service routines run in foreground Task code runs in background Limitations
Preemptive Scheduling Lecture 18 18-1 Big Picture Methods learned so far We ve been using a foreground/background system Interrupt service routines run in foreground Task code runs in background Limitations
REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW
 REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW Mrinal Parikshit Chandane Former Assistant Professor, Dept. of E&TC, KJSCE, (India) ABSTRACT Telecommunication applications such as telephony, navigation
REAL TIME OPERATING SYSTEMS: A COMPLETE OVERVIEW Mrinal Parikshit Chandane Former Assistant Professor, Dept. of E&TC, KJSCE, (India) ABSTRACT Telecommunication applications such as telephony, navigation
FreeRTOS Kernel: Developer Guide
 FreeRTOS Kernel Developer Guide FreeRTOS Kernel: Developer Guide Copyright 2018 Amazon Web Services, Inc. and/or its affiliates. All rights reserved. Amazon's trademarks and trade dress may not be used in
FreeRTOS Kernel Developer Guide FreeRTOS Kernel: Developer Guide Copyright 2018 Amazon Web Services, Inc. and/or its affiliates. All rights reserved. Amazon's trademarks and trade dress may not be used in
Major Requirements of an OS
 Process CSCE 351: Operating System Kernels Major Requirements of an OS Interleave the execution of several processes to maximize processor utilization while providing reasonable response time Allocate
Process CSCE 351: Operating System Kernels Major Requirements of an OS Interleave the execution of several processes to maximize processor utilization while providing reasonable response time Allocate
EECS 473 Advanced Embedded Systems
 EECS 473 Advanced Embedded Systems An introduction to real time systems and scheduling Chunks adapted from work by Dr. Fred Kuhns of Washington University and Farhan Hormasji Outline Overview of real-time
EECS 473 Advanced Embedded Systems An introduction to real time systems and scheduling Chunks adapted from work by Dr. Fred Kuhns of Washington University and Farhan Hormasji Outline Overview of real-time
Reference Model and Scheduling Policies for Real-Time Systems
 ESG Seminar p.1/42 Reference Model and Scheduling Policies for Real-Time Systems Mayank Agarwal and Ankit Mathur Dept. of Computer Science and Engineering, Indian Institute of Technology Delhi ESG Seminar
ESG Seminar p.1/42 Reference Model and Scheduling Policies for Real-Time Systems Mayank Agarwal and Ankit Mathur Dept. of Computer Science and Engineering, Indian Institute of Technology Delhi ESG Seminar
CODE TIME TECHNOLOGIES. Abassi RTOS. Porting Document. ATmega128 GCC
 CODE TIME TECHNOLOGIES Abassi RTOS Porting Document ATmega128 GCC Copyright Information This document is copyright Code Time Technologies Inc. 2011,2012. All rights reserved. No part of this document may
CODE TIME TECHNOLOGIES Abassi RTOS Porting Document ATmega128 GCC Copyright Information This document is copyright Code Time Technologies Inc. 2011,2012. All rights reserved. No part of this document may
Process Description and Control. Chapter 3
 Process Description and Control Chapter 3 Contents Process states Process description Process control Unix process management Process From processor s point of view execute instruction dictated by program
Process Description and Control Chapter 3 Contents Process states Process description Process control Unix process management Process From processor s point of view execute instruction dictated by program
Processes and Non-Preemptive Scheduling. Otto J. Anshus
 Processes and Non-Preemptive Scheduling Otto J. Anshus Threads Processes Processes Kernel An aside on concurrency Timing and sequence of events are key concurrency issues We will study classical OS concurrency
Processes and Non-Preemptive Scheduling Otto J. Anshus Threads Processes Processes Kernel An aside on concurrency Timing and sequence of events are key concurrency issues We will study classical OS concurrency
Announcement. Exercise #2 will be out today. Due date is next Monday
 Announcement Exercise #2 will be out today Due date is next Monday Major OS Developments 2 Evolution of Operating Systems Generations include: Serial Processing Simple Batch Systems Multiprogrammed Batch
Announcement Exercise #2 will be out today Due date is next Monday Major OS Developments 2 Evolution of Operating Systems Generations include: Serial Processing Simple Batch Systems Multiprogrammed Batch
COMP 7860 Embedded Real- Time Systems: Threads
 COMP 7860 Embedded Real- Time Systems: Threads Jacky Baltes Autonomous Agents Lab University of Manitoba Winnipeg, Canada R3T 2N2 Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky http://aalab.cs.umanitoba.ca
COMP 7860 Embedded Real- Time Systems: Threads Jacky Baltes Autonomous Agents Lab University of Manitoba Winnipeg, Canada R3T 2N2 Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky http://aalab.cs.umanitoba.ca
Zilog Real-Time Kernel
 An Company Configurable Compilation RZK allows you to specify system parameters at compile time. For example, the number of objects, such as threads and semaphores required, are specez80acclaim! Family
An Company Configurable Compilation RZK allows you to specify system parameters at compile time. For example, the number of objects, such as threads and semaphores required, are specez80acclaim! Family
Xinu on the Transputer
 Purdue University Purdue e-pubs Department of Computer Science Technical Reports Department of Computer Science 1990 Xinu on the Transputer Douglas E. Comer Purdue University, comer@cs.purdue.edu Victor
Purdue University Purdue e-pubs Department of Computer Science Technical Reports Department of Computer Science 1990 Xinu on the Transputer Douglas E. Comer Purdue University, comer@cs.purdue.edu Victor
AN HONORS UNIVERSITY IN MARYLAND UMBC. AvrX. Yousef Ebrahimi Professor Ryan Robucci
 AvrX https://github.com/kororos/avrx Yousef Ebrahimi Professor Ryan Robucci Introduction AvrX is a Real Time Multitasking Kernel written for the Atmel AVR series of micro controllers. The Kernel is written
AvrX https://github.com/kororos/avrx Yousef Ebrahimi Professor Ryan Robucci Introduction AvrX is a Real Time Multitasking Kernel written for the Atmel AVR series of micro controllers. The Kernel is written
5/11/2012 CMSIS-RTOS. Niall Cooling Feabhas Limited CMSIS. Cortex Microcontroller Software Interface Standard.
 Niall Cooling Feabhas Limited www.feabhas.com Cortex Microcontroller Software Interface Standard CMSIS 2 1 ARM Cortex Family A Series Application MMU Linux, Android, Windows R Series Real-Time MPU M Series
Niall Cooling Feabhas Limited www.feabhas.com Cortex Microcontroller Software Interface Standard CMSIS 2 1 ARM Cortex Family A Series Application MMU Linux, Android, Windows R Series Real-Time MPU M Series
Threads Chapter 5 1 Chapter 5
 Threads Chapter 5 1 Chapter 5 Process Characteristics Concept of Process has two facets. A Process is: A Unit of resource ownership: a virtual address space for the process image control of some resources
Threads Chapter 5 1 Chapter 5 Process Characteristics Concept of Process has two facets. A Process is: A Unit of resource ownership: a virtual address space for the process image control of some resources
ECE 477 Digital Systems Senior Design Project. Module 10 Embedded Software Development
 2011 by D. G. Meyer ECE 477 Digital Systems Senior Design Project Module 10 Embedded Software Development Outline Memory Models Memory Sections Discussion Application Code Organization Memory Models -
2011 by D. G. Meyer ECE 477 Digital Systems Senior Design Project Module 10 Embedded Software Development Outline Memory Models Memory Sections Discussion Application Code Organization Memory Models -
freertos & lwip for ZYNQ (and Zedboard)
") freertos & lwip for ZYNQ (and Zedboard) Dr. Heinz Rongen Forschungszentrum Jülich GmbH Zentralinstitut Systeme der Elektronik (ZEA-2) H.Rongen@fz-juelich.de µcontroller (The small ones ) - Single Chip
freertos & lwip for ZYNQ (and Zedboard) Dr. Heinz Rongen Forschungszentrum Jülich GmbH Zentralinstitut Systeme der Elektronik (ZEA-2) H.Rongen@fz-juelich.de µcontroller (The small ones ) - Single Chip
Introduction to Real-Time Operating Systems
 Introduction to Real-Time Operating Systems GPOS vs RTOS General purpose operating systems Real-time operating systems GPOS vs RTOS: Similarities Multitasking Resource management OS services to applications
Introduction to Real-Time Operating Systems GPOS vs RTOS General purpose operating systems Real-time operating systems GPOS vs RTOS: Similarities Multitasking Resource management OS services to applications
Program Verification of FreeRTOS Using Microsoft Dafny
 Cleveland State University EngagedScholarship@CSU ETD Archive 2014 Program Verification of FreeRTOS Using Microsoft Dafny Matthew J. Matias Cleveland State University How does access to this work benefit
Cleveland State University EngagedScholarship@CSU ETD Archive 2014 Program Verification of FreeRTOS Using Microsoft Dafny Matthew J. Matias Cleveland State University How does access to this work benefit
Operating Systems Design Fall 2010 Exam 1 Review. Paul Krzyzanowski
 Operating Systems Design Fall 2010 Exam 1 Review Paul Krzyzanowski pxk@cs.rutgers.edu 1 Question 1 To a programmer, a system call looks just like a function call. Explain the difference in the underlying
Operating Systems Design Fall 2010 Exam 1 Review Paul Krzyzanowski pxk@cs.rutgers.edu 1 Question 1 To a programmer, a system call looks just like a function call. Explain the difference in the underlying
2 Principal Architect EDU,QuEST Global, Thiruvananthapuram
 Analysis of porting Free RTOS on MSP430 architecture and study of performance parameters on small factor Embedded Systems Nandana V. 1, Jithendran A. 2, Shreelekshmi R. 3 1 M.Tech Scholar, LBSITW, Poojappura,
Analysis of porting Free RTOS on MSP430 architecture and study of performance parameters on small factor Embedded Systems Nandana V. 1, Jithendran A. 2, Shreelekshmi R. 3 1 M.Tech Scholar, LBSITW, Poojappura,
Lesson 5: Software for embedding in System- Part 2
 Lesson 5: Software for embedding in System- Part 2 Device drivers, Device manager, OS, RTOS and Software tools 1 Outline Device drivers Device manager Multitasking using an operating system (OS) and Real
Lesson 5: Software for embedding in System- Part 2 Device drivers, Device manager, OS, RTOS and Software tools 1 Outline Device drivers Device manager Multitasking using an operating system (OS) and Real
VORAGO VA108xx FreeRTOS port application note
 VORAGO VA108xx FreeRTOS port application note Oct 21, 2016 Version 1.0 (Initial release) VA10800/VA10820 Abstract Real-Time Operating System (RTOS) is a popular software principle used for real-time applications
VORAGO VA108xx FreeRTOS port application note Oct 21, 2016 Version 1.0 (Initial release) VA10800/VA10820 Abstract Real-Time Operating System (RTOS) is a popular software principle used for real-time applications
CODE TIME TECHNOLOGIES. Abassi RTOS. Porting Document. ARM Cortex-M3 CCS
 CODE TIME TECHNOLOGIES Abassi RTOS Porting Document ARM Cortex-M3 CCS Copyright Information This document is copyright Code Time Technologies Inc. 2011,2012. All rights reserved. No part of this document
CODE TIME TECHNOLOGIES Abassi RTOS Porting Document ARM Cortex-M3 CCS Copyright Information This document is copyright Code Time Technologies Inc. 2011,2012. All rights reserved. No part of this document
SIDDHARTH GROUP OF INSTITUTIONS :: PUTTUR Siddharth Nagar, Narayanavanam Road QUESTION BANK (DESCRIPTIVE) UNIT I OPERATING SYSTEMS
 UNIT I OPERATING SYSTEMS") UNIT I OPERATING SYSTEMS 1. Write a short note about [6+6M] a) Time services b) Scheduling Mechanisms 2. a) Explain the overview of Threads and Tasks. [6M] b) Draw the structure of Micro kernel and explain
UNIT I OPERATING SYSTEMS 1. Write a short note about [6+6M] a) Time services b) Scheduling Mechanisms 2. a) Explain the overview of Threads and Tasks. [6M] b) Draw the structure of Micro kernel and explain
Cooperative Multitasking
 Cooperative Multitasking Cooperative Multitasking let's make the controller for the lamp in an LCD projector Lamp off Fan off evbutton Lamp on Fan on evtimeout Lamp off Fan on evbutton Code for LCD Projector
Cooperative Multitasking Cooperative Multitasking let's make the controller for the lamp in an LCD projector Lamp off Fan off evbutton Lamp on Fan on evtimeout Lamp off Fan on evbutton Code for LCD Projector
Introduction. CS3026 Operating Systems Lecture 01
 Introduction CS3026 Operating Systems Lecture 01 One or more CPUs Device controllers (I/O modules) Memory Bus Operating system? Computer System What is an Operating System An Operating System is a program
Introduction CS3026 Operating Systems Lecture 01 One or more CPUs Device controllers (I/O modules) Memory Bus Operating system? Computer System What is an Operating System An Operating System is a program
Cross-Domain Development Kit XDK110 Platform for Application Development
 FreeRTOS Guide Cross-Domain Development Kit Platform for Application Development Bosch Connected Devices and Solutions : FreeRTOS Guide Document revision 2.0 Document release date 17.08.17 Workbench version
FreeRTOS Guide Cross-Domain Development Kit Platform for Application Development Bosch Connected Devices and Solutions : FreeRTOS Guide Document revision 2.0 Document release date 17.08.17 Workbench version
Concurrent Programming. Implementation Alternatives. Content. Real-Time Systems, Lecture 2. Historical Implementation Alternatives.
 Content Concurrent Programming Real-Time Systems, Lecture 2 [Real-Time Control System: Chapter 3] 1. Implementation Alternatives Martina Maggio 19 January 2017 Lund University, Department of Automatic
Content Concurrent Programming Real-Time Systems, Lecture 2 [Real-Time Control System: Chapter 3] 1. Implementation Alternatives Martina Maggio 19 January 2017 Lund University, Department of Automatic
Short Term Courses (Including Project Work)
") Short Term Courses (Including Project Work) Courses: 1.) Microcontrollers and Embedded C Programming (8051, PIC & ARM, includes a project on Robotics) 2.) DSP (Code Composer Studio & MATLAB, includes Embedded
Short Term Courses (Including Project Work) Courses: 1.) Microcontrollers and Embedded C Programming (8051, PIC & ARM, includes a project on Robotics) 2.) DSP (Code Composer Studio & MATLAB, includes Embedded
Concurrent Programming
 Concurrent Programming Real-Time Systems, Lecture 2 Martina Maggio 19 January 2017 Lund University, Department of Automatic Control www.control.lth.se/course/frtn01 Content [Real-Time Control System: Chapter
Concurrent Programming Real-Time Systems, Lecture 2 Martina Maggio 19 January 2017 Lund University, Department of Automatic Control www.control.lth.se/course/frtn01 Content [Real-Time Control System: Chapter
Free-RTOS Implementation
 Free-RTOS Implementation Deepak D Souza Department of Computer Science and Automation Indian Institute of Science, Bangalore. 23 August 2011 Outline 1 Architecture of Free-RTOS 2 Key data structures 3
Free-RTOS Implementation Deepak D Souza Department of Computer Science and Automation Indian Institute of Science, Bangalore. 23 August 2011 Outline 1 Architecture of Free-RTOS 2 Key data structures 3
ZiLOG Real-Time Kernel Version 1.2.0
 ez80acclaim Family of Microcontrollers Version 1.2.0 PRELIMINARY Introduction The (RZK) is a realtime, preemptive, multitasking kernel designed for time-critical embedded applications. It is currently
ez80acclaim Family of Microcontrollers Version 1.2.0 PRELIMINARY Introduction The (RZK) is a realtime, preemptive, multitasking kernel designed for time-critical embedded applications. It is currently
6/20/2018. Lecture 2: Platforms & RTOS. Outline. Lab Setup (20 min) Labs work. Lecture: Platform + RTOS
 Labs work. Lecture: Platform + RTOS") Lecture 2: Platforms & RTOS 1 Outline Lab Setup (20 min) Labs work Workbench + vxworks Documentations (15 min) Project Management (25 min) Host Shell (25 min) Lecture: Platform + RTOS 2 1 3 Microcomputer
Lecture 2: Platforms & RTOS 1 Outline Lab Setup (20 min) Labs work Workbench + vxworks Documentations (15 min) Project Management (25 min) Host Shell (25 min) Lecture: Platform + RTOS 2 1 3 Microcomputer
Process Description and Control. Major Requirements of an Operating System
 Process Description and Control Chapter 3 1 Major Requirements of an Operating System Interleave the execution of several processes to maximize processor utilization while providing reasonable response
Process Description and Control Chapter 3 1 Major Requirements of an Operating System Interleave the execution of several processes to maximize processor utilization while providing reasonable response
Major Requirements of an Operating System Process Description and Control
 Major Requirements of an Operating System Process Description and Control Chapter 3 Interleave the execution of several processes to maximize processor utilization while providing reasonable response time
Major Requirements of an Operating System Process Description and Control Chapter 3 Interleave the execution of several processes to maximize processor utilization while providing reasonable response time
2. Introduction to Software for Embedded Systems
 2. Introduction to Software for Embedded Systems Lothar Thiele ETH Zurich, Switzerland 2-1 Contents of Lectures (Lothar Thiele) 1. Introduction to Embedded System Design 2. Software for Embedded Systems
2. Introduction to Software for Embedded Systems Lothar Thiele ETH Zurich, Switzerland 2-1 Contents of Lectures (Lothar Thiele) 1. Introduction to Embedded System Design 2. Software for Embedded Systems
Interrupts and Time. Real-Time Systems, Lecture 5. Martina Maggio 28 January Lund University, Department of Automatic Control
 Interrupts and Time Real-Time Systems, Lecture 5 Martina Maggio 28 January 2016 Lund University, Department of Automatic Control Content [Real-Time Control System: Chapter 5] 1. Interrupts 2. Clock Interrupts
Interrupts and Time Real-Time Systems, Lecture 5 Martina Maggio 28 January 2016 Lund University, Department of Automatic Control Content [Real-Time Control System: Chapter 5] 1. Interrupts 2. Clock Interrupts
Interrupts and Time. Interrupts. Content. Real-Time Systems, Lecture 5. External Communication. Interrupts. Interrupts
 Content Interrupts and Time Real-Time Systems, Lecture 5 [Real-Time Control System: Chapter 5] 1. Interrupts 2. Clock Interrupts Martina Maggio 25 January 2017 Lund University, Department of Automatic
Content Interrupts and Time Real-Time Systems, Lecture 5 [Real-Time Control System: Chapter 5] 1. Interrupts 2. Clock Interrupts Martina Maggio 25 January 2017 Lund University, Department of Automatic
Designing Responsive and Real-Time Systems
 Designing Responsive and Real-Time Systems Chapter 10 Renesas Electronics America Inc. Embedded Systems using the RX63N Rev. 1.0 00000-A Learning Objectives Most Embedded Systems have multiple real time
Designing Responsive and Real-Time Systems Chapter 10 Renesas Electronics America Inc. Embedded Systems using the RX63N Rev. 1.0 00000-A Learning Objectives Most Embedded Systems have multiple real time
Timers 1 / 46. Jiffies. Potent and Evil Magic
 Timers 1 / 46 Jiffies Each timer tick, a variable called jiffies is incremented It is thus (roughly) the number of HZ since system boot A 32-bit counter incremented at 1000 Hz wraps around in about 50
Timers 1 / 46 Jiffies Each timer tick, a variable called jiffies is incremented It is thus (roughly) the number of HZ since system boot A 32-bit counter incremented at 1000 Hz wraps around in about 50
8: Scheduling. Scheduling. Mark Handley
 8: Scheduling Mark Handley Scheduling On a multiprocessing system, more than one process may be available to run. The task of deciding which process to run next is called scheduling, and is performed by
8: Scheduling Mark Handley Scheduling On a multiprocessing system, more than one process may be available to run. The task of deciding which process to run next is called scheduling, and is performed by
Lecture 3. Introduction to Real-Time kernels. Real-Time Systems
 Real-Time Systems Lecture 3 Introduction to Real-Time kernels Task States Generic architecture of Real-Time kernels Typical structures and functions of Real-Time kernels Last lecture (2) Computational
Real-Time Systems Lecture 3 Introduction to Real-Time kernels Task States Generic architecture of Real-Time kernels Typical structures and functions of Real-Time kernels Last lecture (2) Computational
3.1 Introduction. Computers perform operations concurrently
 PROCESS CONCEPTS 1 3.1 Introduction Computers perform operations concurrently For example, compiling a program, sending a file to a printer, rendering a Web page, playing music and receiving e-mail Processes
PROCESS CONCEPTS 1 3.1 Introduction Computers perform operations concurrently For example, compiling a program, sending a file to a printer, rendering a Web page, playing music and receiving e-mail Processes
real-time kernel documentation
 version 1.1 real-time kernel documentation Introduction This document explains the inner workings of the Helium real-time kernel. It is not meant to be a user s guide. Instead, this document explains overall
version 1.1 real-time kernel documentation Introduction This document explains the inner workings of the Helium real-time kernel. It is not meant to be a user s guide. Instead, this document explains overall
Process Description and Control
 Process Description and Control 1 summary basic concepts process control block process trace process dispatching process states process description process control 2 Process A program in execution (running)
Process Description and Control 1 summary basic concepts process control block process trace process dispatching process states process description process control 2 Process A program in execution (running)
ADAPTING MODE SWITCHES INTO THE HIERARCHICAL SCHEDULING DANIEL SANCHEZ VILLALBA
 ADAPTING MODE SWITCHES INTO THE HIERARCHICAL SCHEDULING DANIEL SANCHEZ VILLALBA 0. Abstract Mode switches are used to partition the system s behavior into different modes to reduce the complexity of large
ADAPTING MODE SWITCHES INTO THE HIERARCHICAL SCHEDULING DANIEL SANCHEZ VILLALBA 0. Abstract Mode switches are used to partition the system s behavior into different modes to reduce the complexity of large
Module 1. Introduction:
 Module 1 Introduction: Operating system is the most fundamental of all the system programs. It is a layer of software on top of the hardware which constitutes the system and manages all parts of the system.
Module 1 Introduction: Operating system is the most fundamental of all the system programs. It is a layer of software on top of the hardware which constitutes the system and manages all parts of the system.
Multitasking. Embedded Systems
 Multitasking in Embedded Systems 1 / 39 Multitasking in Embedded Systems v1.0 Multitasking in ES What is Singletasking? What is Multitasking? Why Multitasking? Different approaches Realtime Operating Systems
Multitasking in Embedded Systems 1 / 39 Multitasking in Embedded Systems v1.0 Multitasking in ES What is Singletasking? What is Multitasking? Why Multitasking? Different approaches Realtime Operating Systems
ArdOS The Arduino Operating System Reference Guide Contents
 ArdOS The Arduino Operating System Reference Guide Contents 1. Introduction... 2 2. Error Handling... 2 3. Initialization and Startup... 2 3.1 Initializing and Starting ArdOS... 2 4. Task Creation... 3
ArdOS The Arduino Operating System Reference Guide Contents 1. Introduction... 2 2. Error Handling... 2 3. Initialization and Startup... 2 3.1 Initializing and Starting ArdOS... 2 4. Task Creation... 3
Example of a Real-Time Operating System: FreeRTOS
 Example of a Real-Time Operating System: FreeRTOS 1. Background of FreeRTOS FreeRTOS Supported architectures and license model Real-time operating system (kernel) from Real Time Engineers Ltd. (London,
Example of a Real-Time Operating System: FreeRTOS 1. Background of FreeRTOS FreeRTOS Supported architectures and license model Real-time operating system (kernel) from Real Time Engineers Ltd. (London,
Corso di Elettronica dei Sistemi Programmabili
 Corso di Elettronica dei Sistemi Programmabili Sistemi Operativi Real Time freertos implementation Aprile 2014 Stefano Salvatori 1/24 Sommario RTOS tick Execution context Context switch example 2/24 RTOS
Corso di Elettronica dei Sistemi Programmabili Sistemi Operativi Real Time freertos implementation Aprile 2014 Stefano Salvatori 1/24 Sommario RTOS tick Execution context Context switch example 2/24 RTOS
Process Description and Control
 Process Description and Control Chapter 3 Muhammad Adri, MT 1 Major Requirements of an Operating System Interleave the execution of several processes to maximize processor utilization while providing reasonable
Process Description and Control Chapter 3 Muhammad Adri, MT 1 Major Requirements of an Operating System Interleave the execution of several processes to maximize processor utilization while providing reasonable
embos Real-Time Operating System embos plug-in for IAR C-Spy Debugger Document: UM01025 Software Version: 3.0 Revision: 0 Date: September 18, 2017
 embos Real-Time Operating System embos plug-in for IAR C-Spy Debugger Document: UM01025 Software Version: 3.0 Revision: 0 Date: September 18, 2017 A product of SEGGER Microcontroller GmbH & Co. KG www.segger.com
embos Real-Time Operating System embos plug-in for IAR C-Spy Debugger Document: UM01025 Software Version: 3.0 Revision: 0 Date: September 18, 2017 A product of SEGGER Microcontroller GmbH & Co. KG www.segger.com
Multiprocessor and Real- Time Scheduling. Chapter 10
 Multiprocessor and Real- Time Scheduling Chapter 10 Classifications of Multiprocessor Loosely coupled multiprocessor each processor has its own memory and I/O channels Functionally specialized processors
Multiprocessor and Real- Time Scheduling Chapter 10 Classifications of Multiprocessor Loosely coupled multiprocessor each processor has its own memory and I/O channels Functionally specialized processors
EECS 473 Advanced Embedded Systems
 EECS 473 Advanced Embedded Systems Lecture 3 An introduction to real time systems and scheduling Chunks adapted from work by Dr. Fred Kuhns of Washington University and Farhan Hormasji Announcements HW0
EECS 473 Advanced Embedded Systems Lecture 3 An introduction to real time systems and scheduling Chunks adapted from work by Dr. Fred Kuhns of Washington University and Farhan Hormasji Announcements HW0
CODE TIME TECHNOLOGIES. Abassi RTOS. Porting Document C28X CCS
 CODE TIME TECHNOLOGIES Abassi RTOS Porting Document C28X CCS Copyright Information This document is copyright Code Time Technologies Inc. 2012-2013. All rights reserved. No part of this document may be
CODE TIME TECHNOLOGIES Abassi RTOS Porting Document C28X CCS Copyright Information This document is copyright Code Time Technologies Inc. 2012-2013. All rights reserved. No part of this document may be
Processes and Threads Implementation
 Processes and Threads Implementation 1 Learning Outcomes An understanding of the typical implementation strategies of processes and threads Including an appreciation of the trade-offs between the implementation
Processes and Threads Implementation 1 Learning Outcomes An understanding of the typical implementation strategies of processes and threads Including an appreciation of the trade-offs between the implementation
Tasks. Task Implementation and management
 Tasks Task Implementation and management Tasks Vocab Absolute time - real world time Relative time - time referenced to some event Interval - any slice of time characterized by start & end times Duration
Tasks Task Implementation and management Tasks Vocab Absolute time - real world time Relative time - time referenced to some event Interval - any slice of time characterized by start & end times Duration
Dr. D. M. Akbar Hussain DE5 Department of Electronic Systems
 Process /Task 1 Process Management Creation & termination of processes (user + System) Interleaving the execution of processes Scheduling of processes Synchronization mechanism between processes Communication
Process /Task 1 Process Management Creation & termination of processes (user + System) Interleaving the execution of processes Scheduling of processes Synchronization mechanism between processes Communication
Real-time operating systems and scheduling
 Real-time operating systems and scheduling Problem 21 Consider a real-time operating system (OS) that has a built-in preemptive scheduler. Each task has a unique priority and the lower the priority id,
Real-time operating systems and scheduling Problem 21 Consider a real-time operating system (OS) that has a built-in preemptive scheduler. Each task has a unique priority and the lower the priority id,
Computer Science 4500 Operating Systems
 Computer Science 4500 Operating Systems Module 6 Process Scheduling Methods Updated: September 25, 2014 2008 Stanley A. Wileman, Jr. Operating Systems Slide 1 1 In This Module Batch and interactive workloads
Computer Science 4500 Operating Systems Module 6 Process Scheduling Methods Updated: September 25, 2014 2008 Stanley A. Wileman, Jr. Operating Systems Slide 1 1 In This Module Batch and interactive workloads
CODE TIME TECHNOLOGIES. Abassi RTOS. Porting Document. ATmega128 IAR
 CODE TIME TECHNOLOGIES Abassi RTOS Porting Document ATmega128 IAR Copyright Information This document is copyright Code Time Technologies Inc. 2011,2012. All rights reserved. No part of this document may
CODE TIME TECHNOLOGIES Abassi RTOS Porting Document ATmega128 IAR Copyright Information This document is copyright Code Time Technologies Inc. 2011,2012. All rights reserved. No part of this document may
CODE TIME TECHNOLOGIES. Abassi RTOS. Porting Document AVR32A GCC
 CODE TIME TECHNOLOGIES Abassi RTOS Porting Document AVR32A GCC Copyright Information This document is copyright Code Time Technologies Inc. 2011-2013. All rights reserved. No part of this document may
CODE TIME TECHNOLOGIES Abassi RTOS Porting Document AVR32A GCC Copyright Information This document is copyright Code Time Technologies Inc. 2011-2013. All rights reserved. No part of this document may
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6602- EMBEDDED SYSTEMS QUESTION BANK UNIT I - INTRODUCTION TO EMBEDDED SYSTEMS PART A
 DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6602- EMBEDDED SYSTEMS QUESTION BANK UNIT I - INTRODUCTION TO EMBEDDED SYSTEMS PART A 1. Define system. A system is a way of working, organizing or
DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE6602- EMBEDDED SYSTEMS QUESTION BANK UNIT I - INTRODUCTION TO EMBEDDED SYSTEMS PART A 1. Define system. A system is a way of working, organizing or
Main Points of the Computer Organization and System Software Module
 Main Points of the Computer Organization and System Software Module You can find below the topics we have covered during the COSS module. Reading the relevant parts of the textbooks is essential for a
Main Points of the Computer Organization and System Software Module You can find below the topics we have covered during the COSS module. Reading the relevant parts of the textbooks is essential for a