Dense 3D Reconstruction from Autonomous Quadrocopters
|
|
|
- Donald Burke
- 5 years ago
- Views:
Transcription








1 Dense 3D Reconstruction from Autonomous Quadrocopters Computer Science & Mathematics TU Munich Martin Oswald, Jakob Engel, Christian Kerl, Frank Steinbrücker, Jan Stühmer & Jürgen Sturm


2 Autonomous Quadrocopters Quadrocopters juggling Mueller, Lupashin, D Andrea IROS 11 Swarms of quadcopters Kushleyev, Mellinger, Kumar RSS 12 Drawbacks: - Controlled environment - Marker points - External sensors / mocap systems 2





3 Realworld Environments 3









4 TUM Computer Vision Group 4





5 Visual SLAM for Navigation Can we use visual SLAM for autonomous quadrocopter navigation? Can we reconstruction the world from autonomous quadcopters? 5




6 Some Related Work Autonomous quadrocopters: Grzonka et al. 09, Mellinger et al. 11, Müller et al. 11, Achtelik et al. 11, Grabe et al. 12, Fraundorfer et al. 12, Schauwecker et al. 12, Huang et al. 11, Multiple view reconstruction: Faugeras, Keriven 98, Duan et al. 04, Yezzi, Soatto 03, Seitz et al. 06, Hernandez et al. 07, Labatut et al. 07, Gallup et al. 07, Newcombe, Davison 10, RGB-D based reconstruction: Rusinkiewicz et al. 02, Curless & Levoy 96, Newcombe et al. 11, Whelan et al. 12, Comport et al. 12, Izadi et al. 13, 6





7 Overview Autonomous quadrocopters Dense reconstruction Realtime 3D scanning Reconstruction on the fly 7
8 Overview Autonomous quadrocopters Dense reconstruction Realtime 3D scanning Reconstruction on the fly 8
9 The Parrot AR.Drone available $300 no hardware / onboard software modifications connected to ground station via WLAN Onboard sensors: front camera (320 x 18fps) inertial measurement unit ultrasound altimeter onboard, optical-flow-based velocity estimation Realtime structure and motion / visual SLAM: Chiuso et al., ECCV 00, Favaro, Jin, Soatto, ICCV 01, Nister, ICCV 03, Davison, ICCV 03, Klein, Murray, ISMAR 07, 9
")



10 Sensor Fusion Open source mono-slam system PTAM (Klein & Murray '07) Drawbacks: Unreliable, no scale Our contributions: camera-based autonomous navigation enhanced reliability by incorporating IMU data ML scale estimate using ultrasound & velocity Engel, Sturm, Cremers, IROS

11 Autonomous Flying & Hovering Engel, Sturm, Cremers, IROS
12 Overview Autonomous quadrocopters Dense reconstruction Realtime 3D scanning Reconstruction on the fly 12

13 Multiple View Reconstruction Kolev, Klodt, Brox, Cremers, Int. J. of Computer Vision 09: Theorem: Globally optimal surfaces can be computed by convex optimization. 13




14 Evolution to Global Optimum Kolev, Klodt, Brox, Cremers, IJCV






15 Silhouette Consistent Reconstruction Kolev, Cremers, ECCV 08, PAMI 09: Theorem: Provably silhouette-consistent reconstructions can be computed by convex optimization over convex domains. 15

16 Action Reconstruction Oswald, Cremers, ICCV 13 4DMoD Workshop 16
17 Action Reconstruction Oswald, Cremers, ICCV 13 4DMoD Workshop 17
18 Action Reconstruction 18
19 Action Reconstruction 19



20 Multiview Reconstruction Can we do realtime dense reconstruction from a handheld camera? 20
21 Realtime Dense Reconstruction Much related work on structure and motion, stereo, and optic flow: Fitzgibbon, Zisserman, ECCV 98 Jin, Favaro, Soatto, CVPR 00 Nister, ICCV 03 Davison, ICCV 03 Pollefeys et al., IJCV 04 Wang et al., 3DPVT 06 Zach et al., DAGM 07 Gallup et al. CVPR 07 Klein, Murray, ISMAR 07 Wedel et al., ICCV 09 Newcombe, Davison, CVPR 10 Real-time calibration Compute optic flow between consecutive images and use it to update a depth map. 21


22 Realtime Dense Reconstruction Brightness constancy: Stuehmer, Gumhold, Cremers, DAGM 10 22

23 Realtime Dense Reconstruction Stuehmer, Gumhold, Cremers, DAGM 10 23

24 Realtime Dense Reconstruction Stuehmer, Gumhold, Cremers, DAGM 10 24


25 Realtime Dense Reconstruction 1.8 fps 11.3 fps 24 fps Stuehmer, Gumhold, Cremers, DAGM 10 25


26 Realtime Dense Reconstruction Newcombe et al., ICCV 11 Wendel et al., CVPR 12 26
27 Dense versus Semi-Dense? 27
28 Overview Autonomous quadrocopters Dense reconstruction Realtime 3D scanning Reconstruction on the fly 28
 (feature detection, descriptor computation, matching & optimization) Point cloud registration (ICP) (depth")

29 Pose Estimation for Known Structure Existing approaches to camera calibration: Visual odometry from sparse feature matching (color only) (feature detection, descriptor computation, matching & optimization) Point cloud registration (ICP) (depth only) (iteratively compute point correspondences and align) Proposed method: exploits both color and depth information directly optimizes dense color consistency pose estimated in realtime by coarse-to-fine warping Steinbruecker, Sturm, Cremers 11 29


30 Realtime dense camera calibration Lie algebra representation of rigid body motion: Photo-consistency: Steinbruecker, Sturm, Cremers 11 30




31 Realtime dense camera calibration Photo-consistency: Taylor expansion: Optimal solution: Steinbruecker, Sturm, Cremers 11 Solve in coarse-to fine manner. 31

32 Realtime dense camera calibration 32

33 Calibration for increasing baseline Steinbruecker, Sturm, Cremers 11 33

34 Third Person Perspective 34

35 Quantitative comparison frame difference k freiburg1/desk frame difference k freiburg2/desk Pose accuracy for increasing baseline Steinbruecker, Sturm, Cremers 11 35
 one zip-archive per sequence")


36 RGB-D Benchmark 39 sequences (19 with ground truth) one zip-archive per sequence containing: - color & depth images (png), - accelerometer data, - trajectory file Sturm, Engelhard, Burgard, Cremers IROS 12 36

37 RGB-D SLAM benchmark Sturm, Engelhard, Burgard, Cremers IROS 12 37


38 RGB-D Based 3D Modeling Color input Depth input Fuse geometry: Curless, Levoy 96, Newcombe et al

39 RGB-D Based 3D Modeling 39

40 Realtime 3D Modeling Download 40




41 Realtime 3D Modeling Download free 41

42 Realtime 3D Modeling Download free 42

43 Realtime 3D Modeling Download free 43

44 Realtime 3D Modeling Download free 44

45 Realtime 3D Modeling Download free 45
46 Overview Autonomous quadrocopters Dense reconstruction Realtime 3D scanning Reconstruction on the fly 46

47 Reconstruction on the Fly Bylow, Sturm, Kerl, Kahl, Cremers RSS 13 47

48 Reconstruction on the Fly Bylow, Sturm, Kerl, Kahl, Cremers RSS 13 48
49 Reconstruction on the Fly Bylow, Sturm, Kerl, Kahl, Cremers RSS 13 49



50 Reconstruction on the Fly Bylow, Sturm, Kerl, Kahl, Cremers RSS 13 50


51 Reconstruction on the Fly Limitations for large-scale reconstruction: camera tracking accumulates drift volumetric fusion requires much memory: 512³ 24 byte/voxel 3.2 GB 1024³ 24 byte/voxel 24 GB 51
52 Large Scale: Loop Closure Kerl, Sturm, Cremers ICRA 13 52

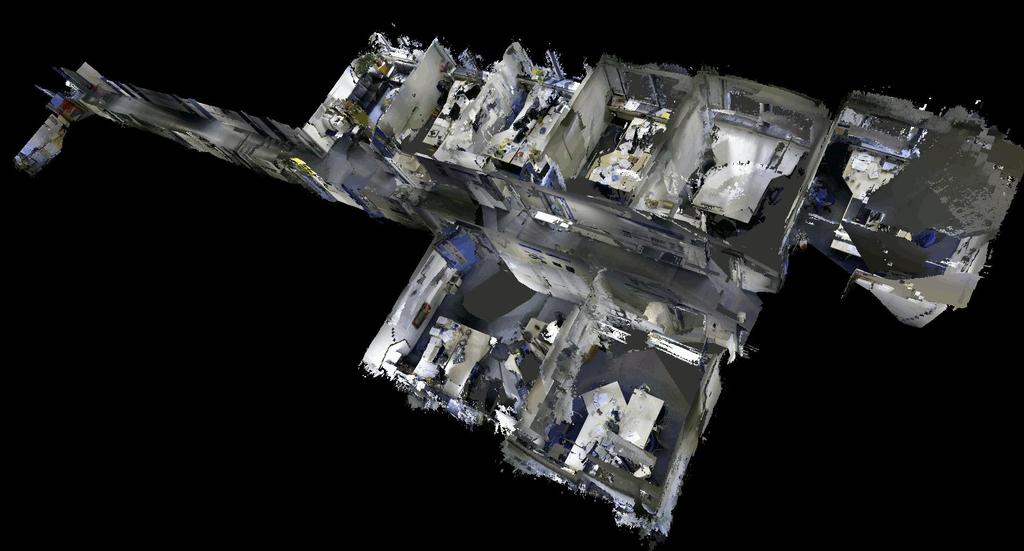

53 Large Scale: Octrees Steinbrücker, Kerl, Sturm, Cremers ICCV 13 53

54 Realtime Large-Scale Fusion Steinbrücker, Kerl, Sturm, Cremers ICCV 13 54

55 even on a CPU! Steinbrücker, Sturm, Cremers, ICRA

56 Summary autonomous quadcopters dense reconstruction action reconstruction RGB-D modeling reconstruction on the fly large scale 56
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Scanning and Printing Objects in 3D Jürgen Sturm
 Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Scanning and Printing Objects in 3D Jürgen Sturm Metaio (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects Quadrocopters
Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich. LSD-SLAM: Large-Scale Direct Monocular SLAM
 Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Computer Vision Group Technical University of Munich Jakob Engel LSD-SLAM: Large-Scale Direct Monocular SLAM Jakob Engel, Thomas Schöps, Daniel Cremers Technical University Munich Monocular Video Engel,
Direct Methods for 3D Reconstruction and Visual SLAM
 03-01 15th IAPR International Conference on Machine Vision Applications (MVA) Nagoya University, Nagoya, Japan, May 8-12, 2017. Direct Methods for 3D Reconstruction and Visual SLAM Daniel Cremers Departments
03-01 15th IAPR International Conference on Machine Vision Applications (MVA) Nagoya University, Nagoya, Japan, May 8-12, 2017. Direct Methods for 3D Reconstruction and Visual SLAM Daniel Cremers Departments
Scanning and Printing Objects in 3D
 Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Scanning and Printing Objects in 3D Dr. Jürgen Sturm metaio GmbH (formerly Technical University of Munich) My Research Areas Visual navigation for mobile robots RoboCup Kinematic Learning Articulated Objects
Semi-Dense Direct SLAM
 Computer Vision Group Technical University of Munich Jakob Engel Jakob Engel, Daniel Cremers David Caruso, Thomas Schöps, Lukas von Stumberg, Vladyslav Usenko, Jörg Stückler, Jürgen Sturm Technical University
Computer Vision Group Technical University of Munich Jakob Engel Jakob Engel, Daniel Cremers David Caruso, Thomas Schöps, Lukas von Stumberg, Vladyslav Usenko, Jörg Stückler, Jürgen Sturm Technical University
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Robust Online 3D Reconstruction Combining a Depth Sensor and Sparse Feature Points
 2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Robust Online 3D Reconstruction Combining a Depth Sensor and Sparse Feature Points Erik
2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Robust Online 3D Reconstruction Combining a Depth Sensor and Sparse Feature Points Erik
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures
 Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures Robert Maier, Jörg Stückler, Daniel Cremers International Conference on 3D Vision (3DV) October 2015, Lyon, France Motivation
CVPR 2014 Visual SLAM Tutorial Kintinuous
 CVPR 2014 Visual SLAM Tutorial Kintinuous kaess@cmu.edu The Robotics Institute Carnegie Mellon University Recap: KinectFusion [Newcombe et al., ISMAR 2011] RGB-D camera GPU 3D/color model RGB TSDF (volumetric
CVPR 2014 Visual SLAM Tutorial Kintinuous kaess@cmu.edu The Robotics Institute Carnegie Mellon University Recap: KinectFusion [Newcombe et al., ISMAR 2011] RGB-D camera GPU 3D/color model RGB TSDF (volumetric
FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs
 FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene Robust Robotics Group, MIT CSAIL LPM Workshop IROS 2017 September 28, 2017 with Nicholas Roy 1
FLaME: Fast Lightweight Mesh Estimation using Variational Smoothing on Delaunay Graphs W. Nicholas Greene Robust Robotics Group, MIT CSAIL LPM Workshop IROS 2017 September 28, 2017 with Nicholas Roy 1
Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction
 MAIER ET AL.: EFFICIENT LARGE-SCALE ONLINE SURFACE CORRECTION 1 Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction Robert Maier maierr@in.tum.de Raphael Schaller schaller@in.tum.de
MAIER ET AL.: EFFICIENT LARGE-SCALE ONLINE SURFACE CORRECTION 1 Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction Robert Maier maierr@in.tum.de Raphael Schaller schaller@in.tum.de
Integrating Depth and Color Cues for Dense Multi-Resolution Scene Mapping Using RGB-D Cameras
 In Proc. of the IEEE Int. Conf. on Multisensor Fusion and Information Integration (MFI), Hamburg, Germany, 2012 Integrating Depth and Color Cues for Dense Multi-Resolution Scene Mapping Using RGB-D Cameras
In Proc. of the IEEE Int. Conf. on Multisensor Fusion and Information Integration (MFI), Hamburg, Germany, 2012 Integrating Depth and Color Cues for Dense Multi-Resolution Scene Mapping Using RGB-D Cameras
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences
 2013 IEEE International Conference on Computer Vision Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences Frank Steinbrücker, Christian Kerl, Jürgen Sturm, and Daniel Cremers Technical
2013 IEEE International Conference on Computer Vision Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences Frank Steinbrücker, Christian Kerl, Jürgen Sturm, and Daniel Cremers Technical
Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences
 Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences Frank Steinbru cker, Christian Kerl, Ju rgen Sturm, and Daniel Cremers Technical University of Munich Boltzmannstrasse 3, 85748
Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences Frank Steinbru cker, Christian Kerl, Ju rgen Sturm, and Daniel Cremers Technical University of Munich Boltzmannstrasse 3, 85748
Hybrids Mixed Approaches
 Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Hybrids Mixed Approaches Stephan Weiss Computer Vision Group NASA-JPL / CalTech Stephan.Weiss@ieee.org (c) 2013. Government sponsorship acknowledged. Outline Why mixing? Parallel Tracking and Mapping Benefits
Sturm, Jürgen; Bylow, Erik; Kerl, Christian; Kahl, Fredrik; Cremers, Daniel
 Dense Tracking and Mapping with a Quadrocopter Sturm, Jürgen; Bylow, Erik; Kerl, Christian; Kahl, Fredrik; Cremers, Daniel 213 Link to publication Citation for published version (APA): Sturm, J., Bylow,
Dense Tracking and Mapping with a Quadrocopter Sturm, Jürgen; Bylow, Erik; Kerl, Christian; Kahl, Fredrik; Cremers, Daniel 213 Link to publication Citation for published version (APA): Sturm, J., Bylow,
Autonomous 3D Reconstruction Using a MAV
 Autonomous 3D Reconstruction Using a MAV Alexander Popov, Dimitrios Zermas and Nikolaos Papanikolopoulos Abstract An approach is proposed for high resolution 3D reconstruction of an object using a Micro
Autonomous 3D Reconstruction Using a MAV Alexander Popov, Dimitrios Zermas and Nikolaos Papanikolopoulos Abstract An approach is proposed for high resolution 3D reconstruction of an object using a Micro
DNA-SLAM: Dense Noise Aware SLAM for ToF RGB-D Cameras
 DNA-SLAM: Dense Noise Aware SLAM for ToF RGB-D Cameras Oliver Wasenmüller, Mohammad Dawud Ansari, Didier Stricker German Research Center for Artificial Intelligence (DFKI) University of Kaiserslautern
DNA-SLAM: Dense Noise Aware SLAM for ToF RGB-D Cameras Oliver Wasenmüller, Mohammad Dawud Ansari, Didier Stricker German Research Center for Artificial Intelligence (DFKI) University of Kaiserslautern
Volumetric 3D Mapping in Real-Time on a CPU
 Volumetric 3D Mapping in Real-Time on a CPU Frank Steinbrücker, Jürgen Sturm, and Daniel Cremers Abstract In this paper we propose a novel volumetric multi-resolution mapping system for RGB-D images that
Volumetric 3D Mapping in Real-Time on a CPU Frank Steinbrücker, Jürgen Sturm, and Daniel Cremers Abstract In this paper we propose a novel volumetric multi-resolution mapping system for RGB-D images that
Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing
 Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing Jakob Engel, Jürgen Sturm, Daniel Cremers Abstract We present an approach that enables a low-cost quadrocopter to accurately
Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing Jakob Engel, Jürgen Sturm, Daniel Cremers Abstract We present an approach that enables a low-cost quadrocopter to accurately
arxiv: v1 [cs.cv] 1 Aug 2017
![arxiv: v1 [cs.cv] 1 Aug 2017](/thumbs/94/121686586.jpg "arxiv: v1 [cs.cv] 1 Aug 2017") Dense Piecewise Planar RGB-D SLAM for Indoor Environments Phi-Hung Le and Jana Kosecka arxiv:1708.00514v1 [cs.cv] 1 Aug 2017 Abstract The paper exploits weak Manhattan constraints to parse the structure
Dense Piecewise Planar RGB-D SLAM for Indoor Environments Phi-Hung Le and Jana Kosecka arxiv:1708.00514v1 [cs.cv] 1 Aug 2017 Abstract The paper exploits weak Manhattan constraints to parse the structure
Real-Time Vision-Based State Estimation and (Dense) Mapping
 Mapping") Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
Real-Time Vision-Based State Estimation and (Dense) Mapping Stefan Leutenegger IROS 2016 Workshop on State Estimation and Terrain Perception for All Terrain Mobile Robots The Perception-Action Cycle in
A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information
 A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information The 17th International Conference on Information Fusion (Fusion 2014) Khalid
A Real-Time RGB-D Registration and Mapping Approach by Heuristically Switching Between Photometric And Geometric Information The 17th International Conference on Information Fusion (Fusion 2014) Khalid
Colored Point Cloud Registration Revisited Supplementary Material
 Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Colored Point Cloud Registration Revisited Supplementary Material Jaesik Park Qian-Yi Zhou Vladlen Koltun Intel Labs A. RGB-D Image Alignment Section introduced a joint photometric and geometric objective
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction. CVPR 2017 Tutorial Christian Häne UC Berkeley
 Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
Geometric and Semantic 3D Reconstruction: Part 4A: Volumetric Semantic 3D Reconstruction CVPR 2017 Tutorial Christian Häne UC Berkeley Dense Multi-View Reconstruction Goal: 3D Model from Images (Depth
SDF-TAR: Parallel Tracking and Refinement in RGB-D Data using Volumetric Registration
 M. SLAVCHEVA, S. ILIC: SDF-TAR 1 SDF-TAR: Parallel Tracking and Refinement in RGB-D Data using Volumetric Registration Miroslava Slavcheva mira.slavcheva@tum.de Slobodan Ilic slobodan.ilic@siemens.com
M. SLAVCHEVA, S. ILIC: SDF-TAR 1 SDF-TAR: Parallel Tracking and Refinement in RGB-D Data using Volumetric Registration Miroslava Slavcheva mira.slavcheva@tum.de Slobodan Ilic slobodan.ilic@siemens.com
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
SLAM II: SLAM for robotic vision-based perception
 SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
RGBD Point Cloud Alignment Using Lucas-Kanade Data Association and Automatic Error Metric Selection
 IEEE TRANSACTIONS ON ROBOTICS, VOL. 31, NO. 6, DECEMBER 15 1 RGBD Point Cloud Alignment Using Lucas-Kanade Data Association and Automatic Error Metric Selection Brian Peasley and Stan Birchfield, Senior
IEEE TRANSACTIONS ON ROBOTICS, VOL. 31, NO. 6, DECEMBER 15 1 RGBD Point Cloud Alignment Using Lucas-Kanade Data Association and Automatic Error Metric Selection Brian Peasley and Stan Birchfield, Senior
15 Years of Visual SLAM
 15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
15 Years of Visual SLAM Andrew Davison Robot Vision Group and Dyson Robotics Laboratory Department of Computing Imperial College London www.google.com/+andrewdavison December 18, 2015 What Has Defined
Tracking an RGB-D Camera Using Points and Planes
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Tracking an RGB-D Camera Using Points and Planes Ataer-Cansizoglu, E.; Taguchi, Y.; Ramalingam, S.; Garaas, T. TR2013-106 December 2013 Abstract
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Tracking an RGB-D Camera Using Points and Planes Ataer-Cansizoglu, E.; Taguchi, Y.; Ramalingam, S.; Garaas, T. TR2013-106 December 2013 Abstract
Combining Depth Fusion and Photometric Stereo for Fine-Detailed 3D Models
 Combining Depth Fusion and Photometric Stereo for Fine-Detailed 3D Models Erik Bylow 1[0000 0002 6665 1637], Robert Maier 2[0000 0003 4428 1089], Fredrik Kahl 3[0000 0001 9835 3020], and Carl Olsson 1,3[0000
Combining Depth Fusion and Photometric Stereo for Fine-Detailed 3D Models Erik Bylow 1[0000 0002 6665 1637], Robert Maier 2[0000 0003 4428 1089], Fredrik Kahl 3[0000 0001 9835 3020], and Carl Olsson 1,3[0000
PL-SVO: Semi-Direct Monocular Visual Odometry by Combining Points and Line Segments
 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Daejeon Convention Center October 9-14, 2016, Daejeon, Korea PL-SVO: Semi-Direct Monocular Visual Odometry by Combining Points
2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Daejeon Convention Center October 9-14, 2016, Daejeon, Korea PL-SVO: Semi-Direct Monocular Visual Odometry by Combining Points
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
arxiv: v2 [cs.cv] 26 Aug 2018
![arxiv: v2 [cs.cv] 26 Aug 2018](/thumbs/91/105044371.jpg "arxiv: v2 [cs.cv] 26 Aug 2018") A Synchronized Stereo and Plenoptic Visual Odometry Dataset Niclas Zeller 1,2, Franz Quint 2, and Uwe Stilla 1 1 Technische Universität München niclas.zeller@tum.de, stilla@tum.de 2 Karlsruhe University
A Synchronized Stereo and Plenoptic Visual Odometry Dataset Niclas Zeller 1,2, Franz Quint 2, and Uwe Stilla 1 1 Technische Universität München niclas.zeller@tum.de, stilla@tum.de 2 Karlsruhe University
Elastic Fragments for Dense Scene Reconstruction
 213 IEEE International Conference on Computer Vision Elastic Fragments for Dense Scene Reconstruction Qian-Yi Zhou 1 Stephen Miller 1 Vladlen Koltun 1,2 1 Stanford University 2 Adobe Research Abstract
213 IEEE International Conference on Computer Vision Elastic Fragments for Dense Scene Reconstruction Qian-Yi Zhou 1 Stephen Miller 1 Vladlen Koltun 1,2 1 Stanford University 2 Adobe Research Abstract
Visual SLAM for small Unmanned Aerial Vehicles
 Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
Visual SLAM for small Unmanned Aerial Vehicles Margarita Chli Autonomous Systems Lab, ETH Zurich Simultaneous Localization And Mapping How can a body navigate in a previously unknown environment while
Continuous and Discrete Optimization Methods in Computer Vision. Daniel Cremers Department of Computer Science University of Bonn
 Continuous and Discrete Optimization Methods in Computer Vision Daniel Cremers Department of Computer Science University of Bonn Oxford, August 16 2007 Segmentation by Energy Minimization Given an image,
Continuous and Discrete Optimization Methods in Computer Vision Daniel Cremers Department of Computer Science University of Bonn Oxford, August 16 2007 Segmentation by Energy Minimization Given an image,
SLAM II: SLAM for robotic vision-based perception
 SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
SLAM II: SLAM for robotic vision-based perception Margarita Chli Martin Rufli, Roland Siegwart Margarita Chli, Martin Rufli, Roland Siegwart SLAM II today s lecture Last time: how to do SLAM? Today: what
Direct Methods in Visual Odometry
 Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
Direct Methods in Visual Odometry July 24, 2017 Direct Methods in Visual Odometry July 24, 2017 1 / 47 Motivation for using Visual Odometry Wheel odometry is affected by wheel slip More accurate compared
An Evaluation of the RGB-D SLAM System
 An Evaluation of the RGB-D SLAM System Felix Endres 1 Jürgen Hess 1 Nikolas Engelhard 1 Jürgen Sturm 2 Daniel Cremers 2 Wolfram Burgard 1 Abstract We present an approach to simultaneous localization and
An Evaluation of the RGB-D SLAM System Felix Endres 1 Jürgen Hess 1 Nikolas Engelhard 1 Jürgen Sturm 2 Daniel Cremers 2 Wolfram Burgard 1 Abstract We present an approach to simultaneous localization and
A Benchmark for RGB-D Visual Odometry, 3D Reconstruction and SLAM
 2014 IEEE International Conference on Robotics & Automation (ICRA) Hong Kong Convention and Exhibition Center May 31 - June 7, 2014. Hong Kong, China A Benchmark for RGB-D Visual Odometry, 3D Reconstruction
2014 IEEE International Conference on Robotics & Automation (ICRA) Hong Kong Convention and Exhibition Center May 31 - June 7, 2014. Hong Kong, China A Benchmark for RGB-D Visual Odometry, 3D Reconstruction
Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Exploration, Multi-Robot Coordination and Coverage Dr. Jürgen Sturm Agenda for Today Exploration with a single robot Coordinated
Stereo and Kinect fusion for continuous. 3D reconstruction and visual odometry
 1 Stereo and Kinect fusion for continuous 3D reconstruction and visual odometry Ozgur YILMAZ #*1, Fatih KARAKUS *2 # Department of Computer Engineering, Turgut Özal University Ankara, TURKEY 1 ozyilmaz@turgutozal.edu.tr
1 Stereo and Kinect fusion for continuous 3D reconstruction and visual odometry Ozgur YILMAZ #*1, Fatih KARAKUS *2 # Department of Computer Engineering, Turgut Özal University Ankara, TURKEY 1 ozyilmaz@turgutozal.edu.tr
Deep Models for 3D Reconstruction
 Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
An Evaluation of Robust Cost Functions for RGB Direct Mapping
 An Evaluation of Robust Cost Functions for RGB Direct Mapping Alejo Concha and Javier Civera Abstract The so-called direct SLAM methods have shown an impressive performance in estimating a dense 3D reconstruction
An Evaluation of Robust Cost Functions for RGB Direct Mapping Alejo Concha and Javier Civera Abstract The so-called direct SLAM methods have shown an impressive performance in estimating a dense 3D reconstruction
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps
 OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
OpenStreetSLAM: Global Vehicle Localization using OpenStreetMaps Georgios Floros, Benito van der Zander and Bastian Leibe RWTH Aachen University, Germany http://www.vision.rwth-aachen.de floros@vision.rwth-aachen.de
Simultaneous Localization and Calibration: Self-Calibration of Consumer Depth Cameras
 Simultaneous Localization and Calibration: Self-Calibration of Consumer Depth Cameras Qian-Yi Zhou Vladlen Koltun Abstract We describe an approach for simultaneous localization and calibration of a stream
Simultaneous Localization and Calibration: Self-Calibration of Consumer Depth Cameras Qian-Yi Zhou Vladlen Koltun Abstract We describe an approach for simultaneous localization and calibration of a stream
Visual-Inertial Localization and Mapping for Robot Navigation
 Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
Visual-Inertial Localization and Mapping for Robot Navigation Dr. Guillermo Gallego Robotics & Perception Group University of Zurich Davide Scaramuzza University of Zurich - http://rpg.ifi.uzh.ch Mocular,
CopyMe3D: Scanning and Printing Persons in 3D
 CopyMe3D: Scanning and Printing Persons in 3D Sturm, Jürgen; Bylow, Erik; Kahl, Fredrik; Cremers, Daniel Published in: Lecture Notes in Computer Science Vol. 8142 (Pattern Recognition, 35th German Conference,
CopyMe3D: Scanning and Printing Persons in 3D Sturm, Jürgen; Bylow, Erik; Kahl, Fredrik; Cremers, Daniel Published in: Lecture Notes in Computer Science Vol. 8142 (Pattern Recognition, 35th German Conference,
Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation
 Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation Menandro Roxas Takeshi Oishi Institute of Industrial Science, The University of Tokyo roxas, oishi @cvl.iis.u-tokyo.ac.jp Abstract We
Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation Menandro Roxas Takeshi Oishi Institute of Industrial Science, The University of Tokyo roxas, oishi @cvl.iis.u-tokyo.ac.jp Abstract We
Visual Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Experimentation, Evaluation and Benchmarking Dr. Jürgen Sturm Agenda for Today Course Evaluation Scientific research: The
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Experimentation, Evaluation and Benchmarking Dr. Jürgen Sturm Agenda for Today Course Evaluation Scientific research: The
Computer Vision 2 Lecture 1
 Computer Vision 2 Lecture 1 Introduction (14.04.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de Organization
Computer Vision 2 Lecture 1 Introduction (14.04.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de Organization
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Optical Flow and Dense Correspondence. Daniel Cremers Computer Science & Mathematics TU Munich
 Optical Flow and Dense Correspondence Computer Science & Mathematics TU Munich Correspondence Problems in Vision 2 Shape Similarity & Shape Matching 3 Overview Optical Flow Estimation Dense Elastic Shape
Optical Flow and Dense Correspondence Computer Science & Mathematics TU Munich Correspondence Problems in Vision 2 Shape Similarity & Shape Matching 3 Overview Optical Flow Estimation Dense Elastic Shape
Augmented Reality, Advanced SLAM, Applications
 Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
Augmented Reality, Advanced SLAM, Applications Prof. Didier Stricker & Dr. Alain Pagani alain.pagani@dfki.de Lecture 3D Computer Vision AR, SLAM, Applications 1 Introduction Previous lectures: Basics (camera,
arxiv: v1 [cs.ro] 26 Sep 2016
![arxiv: v1 [cs.ro] 26 Sep 2016](/thumbs/76/73303427.jpg "arxiv: v1 [cs.ro] 26 Sep 2016") Autonomous Exploration with a Low-Cost Quadrocopter using Semi-Dense Monocular SLAM Lukas von Stumberg 1, Vladyslav Usenko 1, Jakob Engel 1, Jörg Stückler 2, and Daniel Cremers 1 arxiv:1609.07835v1 [cs.ro]
Autonomous Exploration with a Low-Cost Quadrocopter using Semi-Dense Monocular SLAM Lukas von Stumberg 1, Vladyslav Usenko 1, Jakob Engel 1, Jörg Stückler 2, and Daniel Cremers 1 arxiv:1609.07835v1 [cs.ro]
Photometric Bundle Adjustment for Dense Multi-View 3D Modeling
 Photometric Bundle Adjustment for Dense Multi-View 3D Modeling Amaël Delaunoy ETH Zürich Amael.Delaunoy@inf.ethz.ch Marc Pollefeys ETH Zürich Marc.Pollefeys@inf.ethz.ch hal-00985811, version 1-30 Apr 2014
Photometric Bundle Adjustment for Dense Multi-View 3D Modeling Amaël Delaunoy ETH Zürich Amael.Delaunoy@inf.ethz.ch Marc Pollefeys ETH Zürich Marc.Pollefeys@inf.ethz.ch hal-00985811, version 1-30 Apr 2014
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Scene Reconstruction with a Mobile Camera
 3D Scene Reconstruction with a Mobile Camera 1 Introduction Robert Carrera and Rohan Khanna Stanford University: CS 231A Autonomous supernumerary arms, or "third arms", while still unconventional, hold
3D Scene Reconstruction with a Mobile Camera 1 Introduction Robert Carrera and Rohan Khanna Stanford University: CS 231A Autonomous supernumerary arms, or "third arms", while still unconventional, hold
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
CSE 527: Introduction to Computer Vision Week 10 Class 2: Visual Odometry November 2nd, 2017 Today Visual Odometry Intro Algorithm SLAM Visual Odometry Input Output Images, Video Camera trajectory, motion
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor
 Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Computationally Efficient Visual-inertial Sensor Fusion for GPS-denied Navigation on a Small Quadrotor Chang Liu & Stephen D. Prior Faculty of Engineering and the Environment, University of Southampton,
Evaluating Egomotion and Structure-from-Motion Approaches Using the TUM RGB-D Benchmark
 Evaluating Egomotion and Structure-from-Motion Approaches Using the TUM RGB-D Benchmark Jürgen Sturm, Wolfram Burgard 2 and Daniel Cremers Abstract In this paper, we present the TUM RGB-D benchmark for
Evaluating Egomotion and Structure-from-Motion Approaches Using the TUM RGB-D Benchmark Jürgen Sturm, Wolfram Burgard 2 and Daniel Cremers Abstract In this paper, we present the TUM RGB-D benchmark for
A TV Prior for High-Quality Local Multi-View Stereo Reconstruction
 2014 Second International Conference on 3D Vision A TV Prior for High-Quality Local Multi-View Stereo Reconstruction Andeas Kuhn Helmut Mayer Bundeswehr University Munich {andreas.kuhn,helmut.mayer}@unibw.de
2014 Second International Conference on 3D Vision A TV Prior for High-Quality Local Multi-View Stereo Reconstruction Andeas Kuhn Helmut Mayer Bundeswehr University Munich {andreas.kuhn,helmut.mayer}@unibw.de
Visual-SLAM Algorithms: a Survey from 2010 to 2016
 Taketomi et al. REVIEW Visual-SLAM Algorithms: a Survey from 2010 to 2016 Takafumi Taketomi 1*, Hideaki Uchiyama 2 and Sei Ikeda 3 Abstract SLAM is an abbreviation for simultaneous localization and mapping,
Taketomi et al. REVIEW Visual-SLAM Algorithms: a Survey from 2010 to 2016 Takafumi Taketomi 1*, Hideaki Uchiyama 2 and Sei Ikeda 3 Abstract SLAM is an abbreviation for simultaneous localization and mapping,
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Signed Distance Fields: A Natural Representation for Both Mapping and Planning
 Signed Distance Fields: A Natural Representation for Both Mapping and Planning Helen Oleynikova, Alex Millane, Zachary Taylor, Enric Galceran, Juan Nieto and Roland Siegwart Autonomous Systems Lab, ETH
Signed Distance Fields: A Natural Representation for Both Mapping and Planning Helen Oleynikova, Alex Millane, Zachary Taylor, Enric Galceran, Juan Nieto and Roland Siegwart Autonomous Systems Lab, ETH
Monocular Camera Localization in 3D LiDAR Maps
 Monocular Camera Localization in 3D LiDAR Maps Tim Caselitz Bastian Steder Michael Ruhnke Wolfram Burgard Abstract Localizing a camera in a given map is essential for vision-based navigation. In contrast
Monocular Camera Localization in 3D LiDAR Maps Tim Caselitz Bastian Steder Michael Ruhnke Wolfram Burgard Abstract Localizing a camera in a given map is essential for vision-based navigation. In contrast
Efficient Onboard RGBD-SLAM for Autonomous MAVs
 Efficient Onboard RGBD-SLAM for Autonomous MAVs Sebastian A. Scherer 1 and Andreas Zell 1 Abstract We present a computationally inexpensive RGBD- SLAM solution taylored to the application on autonomous
Efficient Onboard RGBD-SLAM for Autonomous MAVs Sebastian A. Scherer 1 and Andreas Zell 1 Abstract We present a computationally inexpensive RGBD- SLAM solution taylored to the application on autonomous
Variational PatchMatch MultiView Reconstruction and Refinement
 Variational PatchMatch MultiView Reconstruction and Refinement Philipp Heise, Brian Jensen, Sebastian Klose, Alois Knoll Department of Informatics, Technische Universität München, Germany {heise,kloses,jensen,knoll}@in.tum.de
Variational PatchMatch MultiView Reconstruction and Refinement Philipp Heise, Brian Jensen, Sebastian Klose, Alois Knoll Department of Informatics, Technische Universität München, Germany {heise,kloses,jensen,knoll}@in.tum.de
Towards Sensor-Aided Multi-View Reconstruction for High Accuracy Applications
 Towards Sensor-Aided Multi-View Reconstruction for High Accuracy Applications Mikhail M. Shashkov, Mauricio Hess-Flores, Shawn Recker, and Kenneth I. Joy Institute for Data Analysis and Visualization University
Towards Sensor-Aided Multi-View Reconstruction for High Accuracy Applications Mikhail M. Shashkov, Mauricio Hess-Flores, Shawn Recker, and Kenneth I. Joy Institute for Data Analysis and Visualization University
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
DCTAM: Drift-Corrected Tracking and Mapping for Autonomous Micro Aerial Vehicles
 DCTAM: Drift-Corrected Tracking and Mapping for Autonomous Micro Aerial Vehicles Sebastian A. Scherer 1, Shaowu Yang 2 and Andreas Zell 1 Abstract Visual odometry, especially using a forwardlooking camera
DCTAM: Drift-Corrected Tracking and Mapping for Autonomous Micro Aerial Vehicles Sebastian A. Scherer 1, Shaowu Yang 2 and Andreas Zell 1 Abstract Visual odometry, especially using a forwardlooking camera
arxiv: v1 [cs.ro] 24 Nov 2018
![arxiv: v1 [cs.ro] 24 Nov 2018](/thumbs/91/105453267.jpg "arxiv: v1 [cs.ro] 24 Nov 2018") BENCHMARKING AND COMPARING POPULAR VISUAL SLAM ALGORITHMS arxiv:1811.09895v1 [cs.ro] 24 Nov 2018 Amey Kasar Department of Electronics and Telecommunication Engineering Pune Institute of Computer Technology
BENCHMARKING AND COMPARING POPULAR VISUAL SLAM ALGORITHMS arxiv:1811.09895v1 [cs.ro] 24 Nov 2018 Amey Kasar Department of Electronics and Telecommunication Engineering Pune Institute of Computer Technology
Multiframe Scene Flow with Piecewise Rigid Motion. Vladislav Golyanik,, Kihwan Kim, Robert Maier, Mathias Nießner, Didier Stricker and Jan Kautz
 Multiframe Scene Flow with Piecewise Rigid Motion Vladislav Golyanik,, Kihwan Kim, Robert Maier, Mathias Nießner, Didier Stricker and Jan Kautz Scene Flow. 2 Scene Flow. 3 Scene Flow. Scene Flow Estimation:
Multiframe Scene Flow with Piecewise Rigid Motion Vladislav Golyanik,, Kihwan Kim, Robert Maier, Mathias Nießner, Didier Stricker and Jan Kautz Scene Flow. 2 Scene Flow. 3 Scene Flow. Scene Flow Estimation:
Outdoor Obstacle Avoidance based on Hybrid Visual Stereo SLAM for an Autonomous Quadrotor MAV
 Outdoor Obstacle Avoidance based on Hybrid Visual Stereo SLAM for an Autonomous Quadrotor MAV Radouane Ait-Jellal and Andreas Zell Abstract We address the problem of on-line volumetric map creation of
Outdoor Obstacle Avoidance based on Hybrid Visual Stereo SLAM for an Autonomous Quadrotor MAV Radouane Ait-Jellal and Andreas Zell Abstract We address the problem of on-line volumetric map creation of
PRECISION ANALYSIS OF VISUAL ODOMETRY BASED ON DISPARITY CHANGING
 PRECISION ANALYSIS OF VISUAL ODOMETRY BASED ON DISPARITY CHANGING C. Y. Fu a, J. R. Tsay a a Dept. of Geomatics, National Cheng Kung University, Tainan, Taiwan - (P66044099, tsayjr)@ncku.edu.tw Commission
PRECISION ANALYSIS OF VISUAL ODOMETRY BASED ON DISPARITY CHANGING C. Y. Fu a, J. R. Tsay a a Dept. of Geomatics, National Cheng Kung University, Tainan, Taiwan - (P66044099, tsayjr)@ncku.edu.tw Commission
Semi-Direct EKF-based Monocular Visual-Inertial Odometry
 Semi-Direct EKF-based Monocular Visual-Inertial Odometry Petri Tanskanen 1, Tobias Naegeli 2, Marc Pollefeys 1 and Otmar Hilliges 2 Abstract We propose a novel monocular visual inertial odometry algorithm
Semi-Direct EKF-based Monocular Visual-Inertial Odometry Petri Tanskanen 1, Tobias Naegeli 2, Marc Pollefeys 1 and Otmar Hilliges 2 Abstract We propose a novel monocular visual inertial odometry algorithm
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview
 Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
Nonlinear State Estimation for Robotics and Computer Vision Applications: An Overview Arun Das 05/09/2017 Arun Das Waterloo Autonomous Vehicles Lab Introduction What s in a name? Arun Das Waterloo Autonomous
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles
 Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Autonomous Navigation in Complex Indoor and Outdoor Environments with Micro Aerial Vehicles Shaojie Shen Dept. of Electrical and Systems Engineering & GRASP Lab, University of Pennsylvania Committee: Daniel
Real-time Depth Enhanced Monocular Odometry
 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014) September 14-18, 2014, Chicago, IL, USA Real-time Depth Enhanced Monocular Odometry Ji Zhang, Michael Kaess, and Sanjiv
2014 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014) September 14-18, 2014, Chicago, IL, USA Real-time Depth Enhanced Monocular Odometry Ji Zhang, Michael Kaess, and Sanjiv
Guidance: A Visual Sensing Platform For Robotic Applications
 Guidance: A Visual Sensing Platform For Robotic Applications Guyue Zhou, Lu Fang, Ketan Tang, Honghui Zhang, Kai Wang, Kang Yang {guyue.zhou, ketan.tang, honghui.zhang, kevin.wang, kang.yang}@dji.com,
Guidance: A Visual Sensing Platform For Robotic Applications Guyue Zhou, Lu Fang, Ketan Tang, Honghui Zhang, Kai Wang, Kang Yang {guyue.zhou, ketan.tang, honghui.zhang, kevin.wang, kang.yang}@dji.com,
A Photometrically Calibrated Benchmark For Monocular Visual Odometry
 A Photometrically Calibrated Benchmark For Monocular Visual Odometry Jakob Engel and Vladyslav Usenko and Daniel Cremers Technical University Munich Abstract arxiv:67.2555v2 [cs.cv] 8 Oct 26 We present
A Photometrically Calibrated Benchmark For Monocular Visual Odometry Jakob Engel and Vladyslav Usenko and Daniel Cremers Technical University Munich Abstract arxiv:67.2555v2 [cs.cv] 8 Oct 26 We present
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras
 Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras Hidenobu Matsuki 1,2, Lukas von Stumberg 2,3, Vladyslav Usenko 2, Jörg Stückler 2 and Daniel Cremers 2 Abstract We propose a novel real-time
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras Hidenobu Matsuki 1,2, Lukas von Stumberg 2,3, Vladyslav Usenko 2, Jörg Stückler 2 and Daniel Cremers 2 Abstract We propose a novel real-time
MonoRGBD-SLAM: Simultaneous Localization and Mapping Using Both Monocular and RGBD Cameras
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com MonoRGBD-SLAM: Simultaneous Localization and Mapping Using Both Monocular and RGBD Cameras Yousif, K.; Taguchi, Y.; Ramalingam, S. TR2017-068
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com MonoRGBD-SLAM: Simultaneous Localization and Mapping Using Both Monocular and RGBD Cameras Yousif, K.; Taguchi, Y.; Ramalingam, S. TR2017-068
Efficient Compositional Approaches for Real-Time Robust Direct Visual Odometry from RGB-D Data
 Efficient Compositional Approaches for Real-Time Robust Direct Visual Odometry from RGB-D Data Sebastian Klose 1, Philipp Heise 1 and Alois Knoll 1 Abstract In this paper we give an evaluation of different
Efficient Compositional Approaches for Real-Time Robust Direct Visual Odometry from RGB-D Data Sebastian Klose 1, Philipp Heise 1 and Alois Knoll 1 Abstract In this paper we give an evaluation of different
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Visual-Inertial RGB-D SLAM for Mobile Augmented Reality
 Visual-Inertial RGB-D SLAM for Mobile Augmented Reality Williem 1, Andre Ivan 1, Hochang Seok 2, Jongwoo Lim 2, Kuk-Jin Yoon 3, Ikhwan Cho 4, and In Kyu Park 1 1 Department of Information and Communication
Visual-Inertial RGB-D SLAM for Mobile Augmented Reality Williem 1, Andre Ivan 1, Hochang Seok 2, Jongwoo Lim 2, Kuk-Jin Yoon 3, Ikhwan Cho 4, and In Kyu Park 1 1 Department of Information and Communication
Live Metric 3D Reconstruction on Mobile Phones
 Live Metric 3D Reconstruction on Mobile Phones Petri Tanskanen, Kalin Kolev, Lorenz Meier, Federico Camposeco, Olivier Saurer, Marc Pollefeys ETH Zurich, Switzerland Abstract In this paper, we propose
Live Metric 3D Reconstruction on Mobile Phones Petri Tanskanen, Kalin Kolev, Lorenz Meier, Federico Camposeco, Olivier Saurer, Marc Pollefeys ETH Zurich, Switzerland Abstract In this paper, we propose
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
arxiv: v1 [cs.ro] 23 Feb 2018
![arxiv: v1 [cs.ro] 23 Feb 2018](/thumbs/84/89142674.jpg "arxiv: v1 [cs.ro] 23 Feb 2018") IMLS-SLAM: scan-to-model matching based on 3D data Jean-Emmanuel Deschaud 1 1 MINES ParisTech, PSL Research University, Centre for Robotics, 60 Bd St Michel 75006 Paris, France arxiv:1802.08633v1 [cs.ro]
IMLS-SLAM: scan-to-model matching based on 3D data Jean-Emmanuel Deschaud 1 1 MINES ParisTech, PSL Research University, Centre for Robotics, 60 Bd St Michel 75006 Paris, France arxiv:1802.08633v1 [cs.ro]
Joint Multiview Segmentation and Localization of RGB-D Images using Depth-Induced Silhouette Consistency
 Joint Multiview Segmentation and Localization of RGB-D Images using Depth-Induced Silhouette Consistency Chi Zhang 1,3 Zhiwei Li 2 Rui Cai 2 Hongyang Chao 1,3 Yong Rui 2 1 Sun Yat-Sen University 2 Microsoft
Joint Multiview Segmentation and Localization of RGB-D Images using Depth-Induced Silhouette Consistency Chi Zhang 1,3 Zhiwei Li 2 Rui Cai 2 Hongyang Chao 1,3 Yong Rui 2 1 Sun Yat-Sen University 2 Microsoft
Vol agile avec des micro-robots volants contrôlés par vision
 Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
Vol agile avec des micro-robots volants contrôlés par vision From Active Perception to Event-based Vision Henri Rebecq from Prof. Davide Scaramuzza s lab GT UAV 17 Novembre 2016, Paris Davide Scaramuzza
Inertial-Kinect Fusion for Outdoor 3D Navigation
 Proceedings of Australasian Conference on Robotics and Automation, 2-4 Dec 213, University of New South Wales, Sydney Australia Inertial-Kinect Fusion for Outdoor 3D Navigation Usman Qayyum and Jonghyuk
Proceedings of Australasian Conference on Robotics and Automation, 2-4 Dec 213, University of New South Wales, Sydney Australia Inertial-Kinect Fusion for Outdoor 3D Navigation Usman Qayyum and Jonghyuk