An Introduction to Distributed Robotic Systems
|
|
|
- Delilah Henderson
- 5 years ago
- Views:
Transcription
1 An Introduction to Distributed Robotic Systems Alcherio Martinoli School of Architecture, Civil and Environmental Engineering Distributed Intelligent Systems and Algorithms Laboratory École Polytechnique Fédérale de Lausanne CH-1015 Lausanne, Switzerland EPFL, Topics in Autonomous Robotics, April 23, 2012



2 Outline Part I (9:15 am - noon) Distributed Robotics: Background Machine-Learning Methods for Distributed Control Particle Swarm Optimization (PSO) Noise-resistant algorithms Collective-specific issues for distributed control design and optimization Particle Swarm Optimization applied to multi-robot systems Conclusion Part I
 Model-Based Methods Bottom-up and top")

3 Outline Part II (2:15-5pm) p.m.) Model-Based Methods Bottom-up and top down approaches Multi-level approach Model Calibration Examples Linear example Nonlinear example Conclusion Part II
4 Background: Multi-Robot Systems
5 Typical Tasks for Multirobot Teams Mapping and exploration Target tracking Carrying objects Playing team games CMPack; 2002 Construction Caloud et al; 1990 Inspection Sensing and monitoring From N. Kalra, PhD CMU, 2006


6 Why Multiple Robots? Faster execution More robust Simpler robots More solutions Task requires it From N. Kalra, PhD CMU, 2006
7 Why Not Multiple Robots? Need comms More complexity Harder to test N x the trouble Expensive From N. Kalra, PhD CMU, 2006
8 Goal of a Multirobot Team Coordinate to distribute tasks and resources in a way that leads to efficient and robust mission completion.
9 Challenges Dynamic events Changing gtask demands Resource failures Adversaries Limited sensing, planning, and actuation Limited communication Diverse team
10 Machine-Learning: i Rationale and Terminology
11 Why Machine-Learning? Complementary to a model-based/engineering approaches: when low-level details matter (optimization) and/or good models do not exist (design)! When the design/optimization space is too big (infinite)/too computationally expensive (e.g. NPhard) to be systematically searched Automatic design and optimization techniques Role of the engineer refocused to performance specification,,problem encoding, and customization of algorithmic parameters (and perhaps operators)
12 Why Machine-Learning? There are design and optimization techniques robust to noise, nonlinearities, discontinuities Possible search spaces: parameters, rules, SW or HW structures/architectures Individual real-time adaptation to new environmental conditions; i.e. increased individual flexibility when environmental conditions are not known/cannot predicted a priori
13 ML Techniques: Classification Axis 1 Supervised learning: off-line, a teacher is available Unsupervised learning: off-line, teacher not available Reinforcement-based (or evaluative) learning: online, no pre-established training and evaluation data sets
14 ML Techniques: Classification i Axis 2 In simulation: reproduces the real scenario in simulation and applies there machine-learning techniques; the learned solutions lti are then downloaded ddonto real lhardware when certain criteria are met Hybrid: most of the time in simulation (e.g. 90%), last period (e.g. 10%) of the learning process on real hardware Hardware-in-the-loop: from the beginning on real hardware (no simulation). Depending on the algorithm more or less rapid
15 ML Techniques: Classification i Axis 3 ML algorithms require often fairly important computational resources (in particular for populationbased algorithms), therefore a further classification is: On-board: machine-learning algorithm run on the system to be learned (no external unit) Off-board: the machine-learning algorithm runs off-board and the system to be learned just serves as embodied implementation of a candidate solution
16 ML Techniques: Classification Axis 4 Population-based ( multi-agent ): a population of candidate solutions is maintained by the algorithm, for instance Genetic Algorithms (individuals), Particle Swarm Optimization (particles), Particle Filter (particle), Ant Colony Optimization (tour solution set, etc.); it can refer also to the fact that multiple agents are needed to build the solution set, for instance in virtual ants as core multi-agent principle in Ant Colony Optimization Hill-climbing ( single-agent ): the machine-learning algorithm work on a single candidate solution and try to improve on it; for instance, (stochastic) gradient-based methods, reinforcement learning algorithms
17 Particle Swarm Optimization



18 Flocking and Swarming Inspiration Principles: Imitate Evaluate Compare
19 PSO: Terminology Population: set of candidate solutions tested in one time step, consists of m particles (e.g., m = 20) Particle: represents a candidate solution; it is characterized by a velocity vector v and a position vector x in the hyperspace of dimension D Evaluation span: evaluation period of each candidate solution during a single time step (algorithm iteration); as in GA the evaluation span might take more or less time depending on the experimental scenario Life span: number of iterations a candidate solution survives Fitness function: measurement of efficacy of a given candidate solution during the evaluation span Population manager: update velocities and position for each particle according to the main PSO loop
20 Evolutionary Loop: Several Generations Start Initialize particles Perform main PSO loop Ex. of end criteria: # of time steps best solution performance End criterion i met? Y End N
21 Initialization: Positions and Velocities
22 The Main PSO Loop Parameters and Variables Functions rand ()= uniformly distributed random number in [0,1] Parameters w: velocity inertia (positive scalar) c p : personal best coefficient/weight (positive scalar) c n : neighborhood best coefficient/weight (positive scalar) Variables x ij (t): position of particle i in the j-th dimension at time step t (j = [1,D]) v ij (t): velocity particle i in the j-th dimension at time step t x * ij ( t ) : position of particle i in the j-th dimension i with maximal fitness up to iteration t * x i j ( t) : position of particle i in the j-th dimension having achieved the maximal fitness up to iteration t in the neighborhood of particle i
23 The Main PSO Loop (Eberhart, Kennedy, and Shi, 1995, 1998) At each time step t for each particle i for each component j update the velocity v ( t + 1) = wv ( t ) + c ij ( ij p rand()( x * ij * x ) + c rand()( x ij n i j x ij ) then move x ( t + 1) = x ( t ) + v ( t + 1 ) ij ( ij ij
24 The main PSO Loop - Vector Visualization Here I am! * xi My position for optimal fitness up to date x i * x i v i The position with optimal fitness of my neighbors up to date
25 Neighborhood Types Size: Neighborhood index considers also the particle itself in the counting Local: only k neighbors considered over m particles in the population (1 < k < m); k=1 means no information from other particles used in velocity update Global: m neighbors Topology: Geographical Social Indexed Random
26 Neighborhood Examples: Geographical vs. Social geographical social
27 Neighborhood Example: Indexed and Circular (lbest) Particle 1 s 3- neighbourhood Virtual circle 6 4 5
28 A Simple PSO Animation M. Clerc
29 GA vs. PSO in Absence of Noise
30 GA vs. PSO Overview According to most recent research, PSO outperforms GA on most (but not all!) continuous optimization problems GA still much more widely used in general research community and robust to continuous and discrete optimization problems Because of random aspects, very difficult to analyze either metaheuristic or make guarantees about performance
31 Benchmark Functions Goal: minimization of a given f(x) Standard benchmark functions with thirty terms (n = 30) and a fixed number of iterations All x i constrained to [-5.12, 5.12]
32 Performance with Small Populations GA: Roulette Wheel for selection, mutation applies numerical adjustment to gene PSO: lbest ring topology with neighborhood of size 3 Algorithm parameters used (but not thoroughly optimized):
33 Performance with Small Populations Bold: best results; 30 runs; no noise on the performance function Function GA PSO (no noise) (mean ± std dev) (mean ± std dev) Sphere 0.02 ± ± 0.00 Generalized Rosenbrock 34.6 ± ± 3.27 Rastrigin 157 ± ± 14.4 Griewank 001± ±
34 Expensive Optimization and Noise Resistance
35 Expensive Optimization Problems Two fundamental reasons making robot control design and optimization expensive in terms of time: 1. Time for evaluation of candidate solutions (e.g., tens of seconds) )>>ti time for application of metaheuristic operators (e.g., milliseconds) 2. Noisy performance evaluation disrupts the adaptation process and require multiple evaluations for actual performance Multiple evaluations at the same point in the search space yield different results Noise causes decreased convergence speed and residual error




36 Reducing Evaluation Time General recipe: exploit more abstracted, calibrated representations (models and simulation tools) See also part II
37 Dealing with Noisy Evaluations Better information about candidate solution can be obtained by combining multiple noisy evaluations We could evaluate systematically each candidate solution for a fixed number of times not efficient from a computational perspective We want tto dedicate di more computational ti ltime to evaluate promising solutions and eliminate as quickly as possible the lucky ones each candidate solution might have been evaluated a different number of times when compared In GA good and robust candidate solutions survive over generations; in PSO they survive in the individual memory Use dedicated functions for aggregating multiple evaluations: e.g., minimum and average or generalized aggregation functions (e.g., quasi-linear weighted means), perhaps combined with a statistical test for comparing resulting aggregated performances
38 GA PSO
39 Testing Noise-Resistant GA and PSO on Benchmarks Benchmark 1 : generalized Rosenbrock function 30 real parameters Minimize objective function Expensive only because of noise Benchmark 2: obstacle avoidance on a robot 22 real parameters Maximize objective function Expensive because of noise and evaluation time

40 Benchmark 1: Gaussian Additive Noise on Generalized Rosenbrock Fair test: same number of evaluations candidate solutions for all algorithms (i.e. n generations/ iterations i of standard d versions compared with n/2 of the noise-resistant ones)
![Benchmark 2: Obstacle Avoidance on a Mobile Robot Similar to [Floreano and Mondada 1996] Discrete-time, single-layer, artificial recurrent neural network](/docs-images/92/108129915/images/41-1.jpg "controller Shaping of neural weights and biases (22 real parameters) fitness function: rewards speed, straight movement, avoiding obstacles Different from")
![[Floreano and Mondada 1996] Environment: bounded dopen-space of 2x2 m instead of a maze A t l lt [P h J EPFL PhD Th i N Actual results: [Pugh J.](/docs-images/92/108129915/images/41-2.jpg ", EPFL PhD Thesis No.")
41 Benchmark 2: Obstacle Avoidance on a Mobile Robot Similar to [Floreano and Mondada 1996] Discrete-time, single-layer, artificial recurrent neural network controller Shaping of neural weights and biases (22 real parameters) fitness function: rewards speed, straight movement, avoiding obstacles Different from [Floreano and Mondada 1996] Environment: bounded dopen-space of 2x2 m instead of a maze A t l lt [P h J EPFL PhD Th i N Actual results: [Pugh J., EPFL PhD Thesis No. 4256, 2008] Similar results: [Pugh et al, IEEE SIS 2005] V = average wheel speed, Δv = difference between wheel speeds, i = value of most active proximity sensor
 34.")
42 Baseline Experiment: Extended-Time Adaptation [Pugh J., EPFL PhD Thesis No. 4256, 2008] Compare the basic algorithms with their corresponding noiseresistant version Population size 100, 100 iterations, evaluation span 300 seconds (150 s for noiseresistant algorithms) 34.7 days Fair test: same total evaluation time for all the algorithms Realistic simulation (Webots) Best evolved solutions averaged over 30 evolutionary runs Best candidate solution in the final pool selected based on 5 runs of 30 s each; performance tested over 40 runs of 30s each Similar performance for all algorithms
43 Where Can Noise-Resistant Algorithms Make the Difference? Limited adaptation time Sudden change in noise distribution Large amount of noise Notes: all examples from shaping obstacle avoidance behavior best evolved solution averaged over multiple runs fair tests: same total amount of evaluation time for all the different algorithms (standard and noise-resistant)
 Trade-offs: population size, number of iterations, evaluation span, number of re- evaluations Realistic simulation (Webots) [Pugh")
44 Limited-Time Adaptation Especially good with small populations Varying population size vs. number of iterations Total adaptation time = 8.3 hours (1/100 of previous learning time) Trade-offs: population size, number of iterations, evaluation span, number of re- evaluations Realistic simulation (Webots) [Pugh J., EPFL PhD Thesis No. 4256, 2008]
 to real robots after 90% learning (even")

45 Sudden Change of Noise Distributions Move from realistic simulation (Webots) to real robots after 90% learning (even faster evolution) Noise-resistance helps speeding up learning after transition [Pugh J., EPFL PhD Thesis No. 4256, 2008]
46 Increased Noise Level Set-Up Scenario 1: One robot learning obstacle avoidance Scenario 2: One robot learning obstacle avoidance, one robot running pre-evolved obstacle avoidance Scenario 3: Two robots co-learning obstacle avoidance 1x1 m arena, PSO, 50 iterations, scenario 3 Idea: more robots more noise (as perceived from an individual robot); no standard com between een the robots but in scenario 3 information sharing through the population manager! [Pugh et al, IEEE SIS 2005]
47 Increased Noise Level Sample Results [Pugh et al, IEEE SIS 2005]
48 From Single to Multi-Unit Systems: Co-Adaptation in a Shared World
49 Adaptation in Multi-Robot Scenarios Collective: fitness become noisy due to partial perception, independent parallel actions
50 Credit Assignment Problem With limited communication, no communication at all, or partial perception:
51 Co-Adaptation in a Collaborative Framework
52 Co-Shaping Collaborative Behavior Three orthogonal axes to consider (extremities and balanced solutions are possible): 1. Performance evaluation: individual vs. group fitness or reinforcement 2. Solution sharing: private vs. public policies 3. Team diversity: i homogeneous vs. heterogeneous learning
53 Multi-Agent Algorithms for Multi-Robot Systems Policy Performance Sharing Diversity i-pr-he individual private heterogeneous i-pr-ho individual private homogeneous i-pu-he individual public heterogeneous i-pu-ho individual public homogeneous g-pr-he group private heterogeneous g-pr-ho group private homogeneous g-pu-he group public heterogeneous g-pu-ho group public homogeneous
54 MA Algorithms for MR Systems Do not make sense (inconsistent) Possible but not scalable Interesting g( (consistent) Policy Performance Sharing Diversity i-pr-he individual private heterogeneous i-pr-ho individual private homogeneous i-pu-he individual public heterogeneous i-pu-ho individual public homogeneous g-pr-he group private ht heterogeneous g-pr-ho group private homogeneous g-pu-he group public heterogeneous g-pu-ho group public homogeneous
55 MA Algorithms for MR Systems Example of collaborative co-learning with binary encoding of 100 candidate solutions and 2 robots





56 Co-Shaping Competitive Behavior fitness f 1 fitness f 2
57 Co-Shaping Obstacle Avoidance Effects of robotic group size Effects of robotic group size Effects of communication constraints
58 MA Algorithms for MR Systems
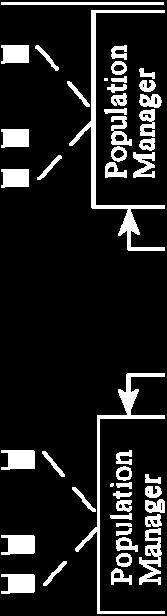
59 Distributed Robotic Adaptation For an individual-public-heterogeneous policy: Standard solution: off-board adaptation using a centralized population manager New solution [Pugh, SIJ 2009]: on-board on-board adaptation using a distributed population manager Fully scalable solution, no single-point of failure Why PSO: appears interesting since this metaheuristic works well with small pools of candidate solutions: candidate pool size robot team size limited particle neighborhood sizes scalable, on-board operation
60 Varying the Robotic Group Size
61 Varying the Robotic Group Size
62 Varying the Robotic Group Size
63 Varying the Robotic Group Size

64 Varying the Robotic Group Size Evolving vs. Testing Environment PSO only; number of particles = 10 Gradually increase number of robots on team Up to 10x faster learning with little performance loss Arena 3x3 m [Pugh and Martinoli, Swarm Intelligence J., 2009]
65 Communication-Based Neighborhoods Default neighborhood - ring topology, 2 neighbors for each robot Problem for real robots: neighbor could be very far away Possible solutions use two closest robots in the arena (capacity limitation), use all robots within wt some radius adus r (a (range limitation); tato reality is affected often by both How will this affect the performance?




66 Communication-Based Neighborhoods




67 Communication-Based Nihb Neighborhoodsh Ring Topology - Standard

68 Communication-Based Neighborhoods 2-closest Model A


69 Communication-Based Nihb Neighborhoodsh Within range r Model B

![, 2009] Realistic simulation results (Webots) 10 Khepera III robots](/docs-images/92/108129915/images/70-1.jpg "(one particle per robot) Standard neighborhood is 2 fixed particles New")

70 Communication-Based Neighborhoods [Pugh and Martinoli, Swarm Intelligence J., 2009] Realistic simulation results (Webots) 10 Khepera III robots (one particle per robot) Standard neighborhood is 2 fixed particles New particle neighborhoods defined by communication limitations: Model A: particles from closest two robots Model B: particles from all robots within range r = 120 cm No drawback to communication-based neighborhoods
71 Varying the Communication Range Arena: 3x3 m, 10 robots total


72 Varying the Communication Range Realistic simulation results (Webots) Low communication ranges learning too slowly High communication ranges fitness plateaus too early Limited communication range gives best performance scalable solution [Pugh and Martinoli, Swarm Intelligence J., 2009]
 and receivers")
 RF chip behind, measured RSSI Measure range & bearing of the next robot")
 for heading assessment Can also be used for 20 kbit/s com channel [Pugh et")
73 Distributed Adaptation with Real Robots - Enabling Technology On-board relative positioning system Principle: belt of IR emitters (LED) and receivers (photodiode) IR LED used as antennas; modulated light (carrier 10.7 MHz) RF chip behind, measured RSSI Measure range & bearing of the next robot (relative positioning) can be coupled with RF channel (e.g ) for heading assessment Can also be used for 20 kbit/s com channel [Pugh et al., IEEE Trans. on Mechatronics, 2009]

74 Distributed Adaptation with Real Robots - Sample Results All operations on-board using relative positioning system Effective learning of obstacle avoidance behavior Similar results for communication-based neighborhoods Arena 3 x 3 m [Pugh and Martinoli, Swarm Intelligence J., 2009]
75 Distributed Adaptation with Real lrobots Before adaptation (5x speed-up)
76 Distributed Adaptation with Real lrobots After adaptation (5x speed-up)
77 Conclusion
78 Take Home Messages Evaluative machine-learning techniques are key for robotic adaptation Computationally efficient, noise-resistant algorithms can be obtained with a simple aggregation criterion in the main algorithmic loop Several successful strategies have been designed for dealing with collective-specific problems; they differentiate along three axes: public/private; homogeneous/heterogeneous, individual/group Multi-robot platforms can be exploited for testing in parallel multiple candidate solutions. PSO appears to be well suited for fully distributed on- board operation and strategies based local proximitybased neighborhood have been successfully tested
79 Additional Literature Part I Books Kennedy J. and Eberhart R. C. with Y. Shi, Swarm Intelligence. Morgan Kaufmann Publisher, Clerc M., Particle Swarm Optimization. ISTE Ltd., London, UK, Engelbrecht A. P., Fundamentals of Computational Swarm Intelligence. John Wiley & Sons, Papers Pugh J. and Martinoli A., Distributed Scalable Multi-Robot Learning using Particle Swarm Optimization. Swarm Intelligence Journal, 3(3): , 222, Pugh J., Raemy X., Favre C., Falconi R., and Martinoli A., A Fast On-Board Relative Positioning Module for Multi-Robot Systems. Special issue on Mechatronics in Multi-Robot Systems, Chow M.-Y., Chiaverini S., Kitts C., editors, IEEE Trans. on Mechatronics, 14(2): , Murciano A. and Millán J. del R., "Specialization in Multi-Agent Systems Through Learning". Biological Cybernetics, 76: , Mataric, M. J. Learning in behavior-based multi-robot systems: Policies, models, and other agents. Special Issue on Multi-disciplinary studies of multiagent learning, Ron Sun, editor, Cognitive Systems Research, 2(1):81-93, 2001.
Discrete Multi-Valued Particle Swarm Optimization
 Discrete Multi-d Particle Swarm Optimization Jim Pugh and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne 05 Lausanne, Switzerland Email: {jim.pugh,alcherio.martinoli}@epfl.ch
Discrete Multi-d Particle Swarm Optimization Jim Pugh and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne 05 Lausanne, Switzerland Email: {jim.pugh,alcherio.martinoli}@epfl.ch
1 Lab 5: Particle Swarm Optimization
 1 Lab 5: Particle Swarm Optimization This laboratory requires the following: (The development tools are installed in GR B0 01 already): C development tools (gcc, make, etc.) Webots simulation software
1 Lab 5: Particle Swarm Optimization This laboratory requires the following: (The development tools are installed in GR B0 01 already): C development tools (gcc, make, etc.) Webots simulation software
1 Lab + Hwk 5: Particle Swarm Optimization
 1 Lab + Hwk 5: Particle Swarm Optimization This laboratory requires the following equipment: C programming tools (gcc, make), already installed in GR B001 Webots simulation software Webots User Guide Webots
1 Lab + Hwk 5: Particle Swarm Optimization This laboratory requires the following equipment: C programming tools (gcc, make), already installed in GR B001 Webots simulation software Webots User Guide Webots
1 Lab + Hwk 5: Particle Swarm Optimization
 1 Lab + Hwk 5: Particle Swarm Optimization This laboratory requires the following equipment: C programming tools (gcc, make). Webots simulation software. Webots User Guide Webots Reference Manual. The
1 Lab + Hwk 5: Particle Swarm Optimization This laboratory requires the following equipment: C programming tools (gcc, make). Webots simulation software. Webots User Guide Webots Reference Manual. The
PARTICLE SWARM OPTIMIZATION (PSO)
") PARTICLE SWARM OPTIMIZATION (PSO) J. Kennedy and R. Eberhart, Particle Swarm Optimization. Proceedings of the Fourth IEEE Int. Conference on Neural Networks, 1995. A population based optimization technique
PARTICLE SWARM OPTIMIZATION (PSO) J. Kennedy and R. Eberhart, Particle Swarm Optimization. Proceedings of the Fourth IEEE Int. Conference on Neural Networks, 1995. A population based optimization technique
Meta- Heuristic based Optimization Algorithms: A Comparative Study of Genetic Algorithm and Particle Swarm Optimization
 2017 2 nd International Electrical Engineering Conference (IEEC 2017) May. 19 th -20 th, 2017 at IEP Centre, Karachi, Pakistan Meta- Heuristic based Optimization Algorithms: A Comparative Study of Genetic
2017 2 nd International Electrical Engineering Conference (IEEC 2017) May. 19 th -20 th, 2017 at IEP Centre, Karachi, Pakistan Meta- Heuristic based Optimization Algorithms: A Comparative Study of Genetic
LECTURE 16: SWARM INTELLIGENCE 2 / PARTICLE SWARM OPTIMIZATION 2
 15-382 COLLECTIVE INTELLIGENCE - S18 LECTURE 16: SWARM INTELLIGENCE 2 / PARTICLE SWARM OPTIMIZATION 2 INSTRUCTOR: GIANNI A. DI CARO BACKGROUND: REYNOLDS BOIDS Reynolds created a model of coordinated animal
15-382 COLLECTIVE INTELLIGENCE - S18 LECTURE 16: SWARM INTELLIGENCE 2 / PARTICLE SWARM OPTIMIZATION 2 INSTRUCTOR: GIANNI A. DI CARO BACKGROUND: REYNOLDS BOIDS Reynolds created a model of coordinated animal
Inertia Weight. v i = ωv i +φ 1 R(0,1)(p i x i )+φ 2 R(0,1)(p g x i ) The new velocity update equation:
(p i x i )+φ 2 R(0,1)(p g x i ) The new velocity update equation:") Convergence of PSO The velocity update equation: v i = v i +φ 1 R(0,1)(p i x i )+φ 2 R(0,1)(p g x i ) for some values of φ 1 and φ 2 the velocity grows without bound can bound velocity to range [ V max,v
Convergence of PSO The velocity update equation: v i = v i +φ 1 R(0,1)(p i x i )+φ 2 R(0,1)(p g x i ) for some values of φ 1 and φ 2 the velocity grows without bound can bound velocity to range [ V max,v
ARTIFICIAL INTELLIGENCE (CSCU9YE ) LECTURE 5: EVOLUTIONARY ALGORITHMS
 LECTURE 5: EVOLUTIONARY ALGORITHMS") ARTIFICIAL INTELLIGENCE (CSCU9YE ) LECTURE 5: EVOLUTIONARY ALGORITHMS Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Optimisation problems Optimisation & search Two Examples The knapsack problem
ARTIFICIAL INTELLIGENCE (CSCU9YE ) LECTURE 5: EVOLUTIONARY ALGORITHMS Gabriela Ochoa http://www.cs.stir.ac.uk/~goc/ OUTLINE Optimisation problems Optimisation & search Two Examples The knapsack problem
IMPROVING THE PARTICLE SWARM OPTIMIZATION ALGORITHM USING THE SIMPLEX METHOD AT LATE STAGE
 IMPROVING THE PARTICLE SWARM OPTIMIZATION ALGORITHM USING THE SIMPLEX METHOD AT LATE STAGE Fang Wang, and Yuhui Qiu Intelligent Software and Software Engineering Laboratory, Southwest-China Normal University,
IMPROVING THE PARTICLE SWARM OPTIMIZATION ALGORITHM USING THE SIMPLEX METHOD AT LATE STAGE Fang Wang, and Yuhui Qiu Intelligent Software and Software Engineering Laboratory, Southwest-China Normal University,
DERIVATIVE-FREE OPTIMIZATION
 DERIVATIVE-FREE OPTIMIZATION Main bibliography J.-S. Jang, C.-T. Sun and E. Mizutani. Neuro-Fuzzy and Soft Computing: A Computational Approach to Learning and Machine Intelligence. Prentice Hall, New Jersey,
DERIVATIVE-FREE OPTIMIZATION Main bibliography J.-S. Jang, C.-T. Sun and E. Mizutani. Neuro-Fuzzy and Soft Computing: A Computational Approach to Learning and Machine Intelligence. Prentice Hall, New Jersey,
Particle Swarm Optimization
 Dario Schor, M.Sc., EIT schor@ieee.org Space Systems Department Magellan Aerospace Winnipeg Winnipeg, Manitoba 1 of 34 Optimization Techniques Motivation Optimization: Where, min x F(x), subject to g(x)
Dario Schor, M.Sc., EIT schor@ieee.org Space Systems Department Magellan Aerospace Winnipeg Winnipeg, Manitoba 1 of 34 Optimization Techniques Motivation Optimization: Where, min x F(x), subject to g(x)
A *69>H>N6 #DJGC6A DG C<>C::G>C<,8>:C8:H /DA 'D 2:6G, ()-"&"3 -"(' ( +-" " " % '.+ % ' -0(+$,
-&3 -(' ( +- % '.+ % ' -0(+$,") The structure is a very important aspect in neural network design, it is not only impossible to determine an optimal structure for a given problem, it is even impossible to prove that a given structure
The structure is a very important aspect in neural network design, it is not only impossible to determine an optimal structure for a given problem, it is even impossible to prove that a given structure
CHAPTER 2 CONVENTIONAL AND NON-CONVENTIONAL TECHNIQUES TO SOLVE ORPD PROBLEM
 20 CHAPTER 2 CONVENTIONAL AND NON-CONVENTIONAL TECHNIQUES TO SOLVE ORPD PROBLEM 2.1 CLASSIFICATION OF CONVENTIONAL TECHNIQUES Classical optimization methods can be classified into two distinct groups:
20 CHAPTER 2 CONVENTIONAL AND NON-CONVENTIONAL TECHNIQUES TO SOLVE ORPD PROBLEM 2.1 CLASSIFICATION OF CONVENTIONAL TECHNIQUES Classical optimization methods can be classified into two distinct groups:
A MULTI-SWARM PARTICLE SWARM OPTIMIZATION WITH LOCAL SEARCH ON MULTI-ROBOT SEARCH SYSTEM
 A MULTI-SWARM PARTICLE SWARM OPTIMIZATION WITH LOCAL SEARCH ON MULTI-ROBOT SEARCH SYSTEM BAHAREH NAKISA, MOHAMMAD NAIM RASTGOO, MOHAMMAD FAIDZUL NASRUDIN, MOHD ZAKREE AHMAD NAZRI Department of Computer
A MULTI-SWARM PARTICLE SWARM OPTIMIZATION WITH LOCAL SEARCH ON MULTI-ROBOT SEARCH SYSTEM BAHAREH NAKISA, MOHAMMAD NAIM RASTGOO, MOHAMMAD FAIDZUL NASRUDIN, MOHD ZAKREE AHMAD NAZRI Department of Computer
Particle Swarm Optimization
 Particle Swarm Optimization Gonçalo Pereira INESC-ID and Instituto Superior Técnico Porto Salvo, Portugal gpereira@gaips.inesc-id.pt April 15, 2011 1 What is it? Particle Swarm Optimization is an algorithm
Particle Swarm Optimization Gonçalo Pereira INESC-ID and Instituto Superior Técnico Porto Salvo, Portugal gpereira@gaips.inesc-id.pt April 15, 2011 1 What is it? Particle Swarm Optimization is an algorithm
ATI Material Do Not Duplicate ATI Material. www. ATIcourses.com. www. ATIcourses.com
 ATI Material Material Do Not Duplicate ATI Material Boost Your Skills with On-Site Courses Tailored to Your Needs www.aticourses.com The Applied Technology Institute specializes in training programs for
ATI Material Material Do Not Duplicate ATI Material Boost Your Skills with On-Site Courses Tailored to Your Needs www.aticourses.com The Applied Technology Institute specializes in training programs for
Argha Roy* Dept. of CSE Netaji Subhash Engg. College West Bengal, India.
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Training Artificial
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Training Artificial
Kyrre Glette INF3490 Evolvable Hardware Cartesian Genetic Programming
 Kyrre Glette kyrrehg@ifi INF3490 Evolvable Hardware Cartesian Genetic Programming Overview Introduction to Evolvable Hardware (EHW) Cartesian Genetic Programming Applications of EHW 3 Evolvable Hardware
Kyrre Glette kyrrehg@ifi INF3490 Evolvable Hardware Cartesian Genetic Programming Overview Introduction to Evolvable Hardware (EHW) Cartesian Genetic Programming Applications of EHW 3 Evolvable Hardware
Particle Swarm Optimization applied to Pattern Recognition
 Particle Swarm Optimization applied to Pattern Recognition by Abel Mengistu Advisor: Dr. Raheel Ahmad CS Senior Research 2011 Manchester College May, 2011-1 - Table of Contents Introduction... - 3 - Objectives...
Particle Swarm Optimization applied to Pattern Recognition by Abel Mengistu Advisor: Dr. Raheel Ahmad CS Senior Research 2011 Manchester College May, 2011-1 - Table of Contents Introduction... - 3 - Objectives...
CT79 SOFT COMPUTING ALCCS-FEB 2014
 Q.1 a. Define Union, Intersection and complement operations of Fuzzy sets. For fuzzy sets A and B Figure Fuzzy sets A & B The union of two fuzzy sets A and B is a fuzzy set C, written as C=AUB or C=A OR
Q.1 a. Define Union, Intersection and complement operations of Fuzzy sets. For fuzzy sets A and B Figure Fuzzy sets A & B The union of two fuzzy sets A and B is a fuzzy set C, written as C=AUB or C=A OR
Small World Particle Swarm Optimizer for Global Optimization Problems
 Small World Particle Swarm Optimizer for Global Optimization Problems Megha Vora and T.T. Mirnalinee Department of Computer Science and Engineering S.S.N College of Engineering, Anna University, Chennai,
Small World Particle Swarm Optimizer for Global Optimization Problems Megha Vora and T.T. Mirnalinee Department of Computer Science and Engineering S.S.N College of Engineering, Anna University, Chennai,
A Hybrid Fireworks Optimization Method with Differential Evolution Operators
 A Fireworks Optimization Method with Differential Evolution Operators YuJun Zheng a,, XinLi Xu a, HaiFeng Ling b a College of Computer Science & Technology, Zhejiang University of Technology, Hangzhou,
A Fireworks Optimization Method with Differential Evolution Operators YuJun Zheng a,, XinLi Xu a, HaiFeng Ling b a College of Computer Science & Technology, Zhejiang University of Technology, Hangzhou,
Handling Multi Objectives of with Multi Objective Dynamic Particle Swarm Optimization
 Handling Multi Objectives of with Multi Objective Dynamic Particle Swarm Optimization Richa Agnihotri #1, Dr. Shikha Agrawal #1, Dr. Rajeev Pandey #1 # Department of Computer Science Engineering, UIT,
Handling Multi Objectives of with Multi Objective Dynamic Particle Swarm Optimization Richa Agnihotri #1, Dr. Shikha Agrawal #1, Dr. Rajeev Pandey #1 # Department of Computer Science Engineering, UIT,
Hybrid Particle Swarm-Based-Simulated Annealing Optimization Techniques
 Hybrid Particle Swarm-Based-Simulated Annealing Optimization Techniques Nasser Sadati Abstract Particle Swarm Optimization (PSO) algorithms recently invented as intelligent optimizers with several highly
Hybrid Particle Swarm-Based-Simulated Annealing Optimization Techniques Nasser Sadati Abstract Particle Swarm Optimization (PSO) algorithms recently invented as intelligent optimizers with several highly
Small World Network Based Dynamic Topology for Particle Swarm Optimization
 Small World Network Based Dynamic Topology for Particle Swarm Optimization Qingxue Liu 1,2, Barend Jacobus van Wyk 1 1 Department of Electrical Engineering Tshwane University of Technology Pretoria, South
Small World Network Based Dynamic Topology for Particle Swarm Optimization Qingxue Liu 1,2, Barend Jacobus van Wyk 1 1 Department of Electrical Engineering Tshwane University of Technology Pretoria, South
Research Article Path Planning Using a Hybrid Evolutionary Algorithm Based on Tree Structure Encoding
 e Scientific World Journal, Article ID 746260, 8 pages http://dx.doi.org/10.1155/2014/746260 Research Article Path Planning Using a Hybrid Evolutionary Algorithm Based on Tree Structure Encoding Ming-Yi
e Scientific World Journal, Article ID 746260, 8 pages http://dx.doi.org/10.1155/2014/746260 Research Article Path Planning Using a Hybrid Evolutionary Algorithm Based on Tree Structure Encoding Ming-Yi
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Modified Particle Swarm Optimization
 Modified Particle Swarm Optimization Swati Agrawal 1, R.P. Shimpi 2 1 Aerospace Engineering Department, IIT Bombay, Mumbai, India, swati.agrawal@iitb.ac.in 2 Aerospace Engineering Department, IIT Bombay,
Modified Particle Swarm Optimization Swati Agrawal 1, R.P. Shimpi 2 1 Aerospace Engineering Department, IIT Bombay, Mumbai, India, swati.agrawal@iitb.ac.in 2 Aerospace Engineering Department, IIT Bombay,
The movement of the dimmer firefly i towards the brighter firefly j in terms of the dimmer one s updated location is determined by the following equat
 An Improved Firefly Algorithm for Optimization Problems Amarita Ritthipakdee 1, Arit Thammano, Nol Premasathian 3, and Bunyarit Uyyanonvara 4 Abstract Optimization problem is one of the most difficult
An Improved Firefly Algorithm for Optimization Problems Amarita Ritthipakdee 1, Arit Thammano, Nol Premasathian 3, and Bunyarit Uyyanonvara 4 Abstract Optimization problem is one of the most difficult
Application of Improved Discrete Particle Swarm Optimization in Logistics Distribution Routing Problem
 Available online at www.sciencedirect.com Procedia Engineering 15 (2011) 3673 3677 Advanced in Control Engineeringand Information Science Application of Improved Discrete Particle Swarm Optimization in
Available online at www.sciencedirect.com Procedia Engineering 15 (2011) 3673 3677 Advanced in Control Engineeringand Information Science Application of Improved Discrete Particle Swarm Optimization in
Particle Swarm Optimization Artificial Bee Colony Chain (PSOABCC): A Hybrid Meteahuristic Algorithm
: A Hybrid Meteahuristic Algorithm") Particle Swarm Optimization Artificial Bee Colony Chain (PSOABCC): A Hybrid Meteahuristic Algorithm Oğuz Altun Department of Computer Engineering Yildiz Technical University Istanbul, Turkey oaltun@yildiz.edu.tr
Particle Swarm Optimization Artificial Bee Colony Chain (PSOABCC): A Hybrid Meteahuristic Algorithm Oğuz Altun Department of Computer Engineering Yildiz Technical University Istanbul, Turkey oaltun@yildiz.edu.tr
GA is the most popular population based heuristic algorithm since it was developed by Holland in 1975 [1]. This algorithm runs faster and requires les
![GA is the most popular population based heuristic algorithm since it was developed by Holland in 1975 [1]. This algorithm runs faster and requires les](/thumbs/74/70695105.jpg "GA is the most popular population based heuristic algorithm since it was developed by Holland in 1975 [1]. This algorithm runs faster and requires les") Chaotic Crossover Operator on Genetic Algorithm Hüseyin Demirci Computer Engineering, Sakarya University, Sakarya, 54187, Turkey Ahmet Turan Özcerit Computer Engineering, Sakarya University, Sakarya, 54187,
Chaotic Crossover Operator on Genetic Algorithm Hüseyin Demirci Computer Engineering, Sakarya University, Sakarya, 54187, Turkey Ahmet Turan Özcerit Computer Engineering, Sakarya University, Sakarya, 54187,
Adaptative Clustering Particle Swarm Optimization
 Adaptative Clustering Particle Swarm Optimization Salomão S. Madeiro, Carmelo J. A. Bastos-Filho, Member, IEEE, and Fernando B. Lima Neto, Senior Member, IEEE, Elliackin M. N. Figueiredo Abstract The performance
Adaptative Clustering Particle Swarm Optimization Salomão S. Madeiro, Carmelo J. A. Bastos-Filho, Member, IEEE, and Fernando B. Lima Neto, Senior Member, IEEE, Elliackin M. N. Figueiredo Abstract The performance
An Introduction to Evolutionary Algorithms
 An Introduction to Evolutionary Algorithms Karthik Sindhya, PhD Postdoctoral Researcher Industrial Optimization Group Department of Mathematical Information Technology Karthik.sindhya@jyu.fi http://users.jyu.fi/~kasindhy/
An Introduction to Evolutionary Algorithms Karthik Sindhya, PhD Postdoctoral Researcher Industrial Optimization Group Department of Mathematical Information Technology Karthik.sindhya@jyu.fi http://users.jyu.fi/~kasindhy/
Model Parameter Estimation
 Model Parameter Estimation Shan He School for Computational Science University of Birmingham Module 06-23836: Computational Modelling with MATLAB Outline Outline of Topics Concepts about model parameter
Model Parameter Estimation Shan He School for Computational Science University of Birmingham Module 06-23836: Computational Modelling with MATLAB Outline Outline of Topics Concepts about model parameter
GENETIC ALGORITHM VERSUS PARTICLE SWARM OPTIMIZATION IN N-QUEEN PROBLEM
 Journal of Al-Nahrain University Vol.10(2), December, 2007, pp.172-177 Science GENETIC ALGORITHM VERSUS PARTICLE SWARM OPTIMIZATION IN N-QUEEN PROBLEM * Azhar W. Hammad, ** Dr. Ban N. Thannoon Al-Nahrain
Journal of Al-Nahrain University Vol.10(2), December, 2007, pp.172-177 Science GENETIC ALGORITHM VERSUS PARTICLE SWARM OPTIMIZATION IN N-QUEEN PROBLEM * Azhar W. Hammad, ** Dr. Ban N. Thannoon Al-Nahrain
CHAPTER 6 ORTHOGONAL PARTICLE SWARM OPTIMIZATION
 131 CHAPTER 6 ORTHOGONAL PARTICLE SWARM OPTIMIZATION 6.1 INTRODUCTION The Orthogonal arrays are helpful in guiding the heuristic algorithms to obtain a good solution when applied to NP-hard problems. This
131 CHAPTER 6 ORTHOGONAL PARTICLE SWARM OPTIMIZATION 6.1 INTRODUCTION The Orthogonal arrays are helpful in guiding the heuristic algorithms to obtain a good solution when applied to NP-hard problems. This
Evolutionary Design of a Collective Sensory System
 From: AAAI Technical Report SS-03-02. Compilation copyright 2003, AAAI (www.aaai.org). All rights reserved. Evolutionary Design of a Collective Sensory System Yizhen Zhang 1,2, Alcherio Martinoli 1, and
From: AAAI Technical Report SS-03-02. Compilation copyright 2003, AAAI (www.aaai.org). All rights reserved. Evolutionary Design of a Collective Sensory System Yizhen Zhang 1,2, Alcherio Martinoli 1, and
A Particle Swarm Optimization Algorithm for Solving Flexible Job-Shop Scheduling Problem
 2011, TextRoad Publication ISSN 2090-4304 Journal of Basic and Applied Scientific Research www.textroad.com A Particle Swarm Optimization Algorithm for Solving Flexible Job-Shop Scheduling Problem Mohammad
2011, TextRoad Publication ISSN 2090-4304 Journal of Basic and Applied Scientific Research www.textroad.com A Particle Swarm Optimization Algorithm for Solving Flexible Job-Shop Scheduling Problem Mohammad
QUANTUM BASED PSO TECHNIQUE FOR IMAGE SEGMENTATION
 International Journal of Computer Engineering and Applications, Volume VIII, Issue I, Part I, October 14 QUANTUM BASED PSO TECHNIQUE FOR IMAGE SEGMENTATION Shradha Chawla 1, Vivek Panwar 2 1 Department
International Journal of Computer Engineering and Applications, Volume VIII, Issue I, Part I, October 14 QUANTUM BASED PSO TECHNIQUE FOR IMAGE SEGMENTATION Shradha Chawla 1, Vivek Panwar 2 1 Department
International Journal of Digital Application & Contemporary research Website: (Volume 1, Issue 7, February 2013)
") Performance Analysis of GA and PSO over Economic Load Dispatch Problem Sakshi Rajpoot sakshirajpoot1988@gmail.com Dr. Sandeep Bhongade sandeepbhongade@rediffmail.com Abstract Economic Load dispatch problem
Performance Analysis of GA and PSO over Economic Load Dispatch Problem Sakshi Rajpoot sakshirajpoot1988@gmail.com Dr. Sandeep Bhongade sandeepbhongade@rediffmail.com Abstract Economic Load dispatch problem
Comparison of Some Evolutionary Algorithms for Approximate Solutions of Optimal Control Problems
 Australian Journal of Basic and Applied Sciences, 4(8): 3366-3382, 21 ISSN 1991-8178 Comparison of Some Evolutionary Algorithms for Approximate Solutions of Optimal Control Problems Akbar H. Borzabadi,
Australian Journal of Basic and Applied Sciences, 4(8): 3366-3382, 21 ISSN 1991-8178 Comparison of Some Evolutionary Algorithms for Approximate Solutions of Optimal Control Problems Akbar H. Borzabadi,
A Comparative Study of Genetic Algorithm and Particle Swarm Optimization
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 18-22 www.iosrjournals.org A Comparative Study of Genetic Algorithm and Particle Swarm Optimization Mrs.D.Shona 1,
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 18-22 www.iosrjournals.org A Comparative Study of Genetic Algorithm and Particle Swarm Optimization Mrs.D.Shona 1,
International Conference on Modeling and SimulationCoimbatore, August 2007
 International Conference on Modeling and SimulationCoimbatore, 27-29 August 2007 OPTIMIZATION OF FLOWSHOP SCHEDULING WITH FUZZY DUE DATES USING A HYBRID EVOLUTIONARY ALGORITHM M.S.N.Kiran Kumara, B.B.Biswalb,
International Conference on Modeling and SimulationCoimbatore, 27-29 August 2007 OPTIMIZATION OF FLOWSHOP SCHEDULING WITH FUZZY DUE DATES USING A HYBRID EVOLUTIONARY ALGORITHM M.S.N.Kiran Kumara, B.B.Biswalb,
Feature weighting using particle swarm optimization for learning vector quantization classifier
 Journal of Physics: Conference Series PAPER OPEN ACCESS Feature weighting using particle swarm optimization for learning vector quantization classifier To cite this article: A Dongoran et al 2018 J. Phys.:
Journal of Physics: Conference Series PAPER OPEN ACCESS Feature weighting using particle swarm optimization for learning vector quantization classifier To cite this article: A Dongoran et al 2018 J. Phys.:
Binary Differential Evolution Strategies
 Binary Differential Evolution Strategies A.P. Engelbrecht, Member, IEEE G. Pampará Abstract Differential evolution has shown to be a very powerful, yet simple, population-based optimization approach. The
Binary Differential Evolution Strategies A.P. Engelbrecht, Member, IEEE G. Pampará Abstract Differential evolution has shown to be a very powerful, yet simple, population-based optimization approach. The
THE DEVELOPMENT OF THE POTENTIAL AND ACADMIC PROGRAMMES OF WROCLAW UNIVERISTY OF TECHNOLOGY METAHEURISTICS
 METAHEURISTICS 1. Objectives The goals of the laboratory workshop are as follows: to learn basic properties of evolutionary computation techniques and other metaheuristics for solving various global optimization
METAHEURISTICS 1. Objectives The goals of the laboratory workshop are as follows: to learn basic properties of evolutionary computation techniques and other metaheuristics for solving various global optimization
Traffic Signal Control Based On Fuzzy Artificial Neural Networks With Particle Swarm Optimization
 Traffic Signal Control Based On Fuzzy Artificial Neural Networks With Particle Swarm Optimization J.Venkatesh 1, B.Chiranjeevulu 2 1 PG Student, Dept. of ECE, Viswanadha Institute of Technology And Management,
Traffic Signal Control Based On Fuzzy Artificial Neural Networks With Particle Swarm Optimization J.Venkatesh 1, B.Chiranjeevulu 2 1 PG Student, Dept. of ECE, Viswanadha Institute of Technology And Management,
Optimization of Benchmark Functions Using Artificial Bee Colony (ABC) Algorithm
 Algorithm") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 10 (October. 2013), V4 PP 09-14 Optimization of Benchmark Functions Using Artificial Bee Colony (ABC) Algorithm
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 10 (October. 2013), V4 PP 09-14 Optimization of Benchmark Functions Using Artificial Bee Colony (ABC) Algorithm
A Multiobjective Memetic Algorithm Based on Particle Swarm Optimization
 A Multiobjective Memetic Algorithm Based on Particle Swarm Optimization Dr. Liu Dasheng James Cook University, Singapore / 48 Outline of Talk. Particle Swam Optimization 2. Multiobjective Particle Swarm
A Multiobjective Memetic Algorithm Based on Particle Swarm Optimization Dr. Liu Dasheng James Cook University, Singapore / 48 Outline of Talk. Particle Swam Optimization 2. Multiobjective Particle Swarm
The Design of Pole Placement With Integral Controllers for Gryphon Robot Using Three Evolutionary Algorithms
 The Design of Pole Placement With Integral Controllers for Gryphon Robot Using Three Evolutionary Algorithms Somayyeh Nalan-Ahmadabad and Sehraneh Ghaemi Abstract In this paper, pole placement with integral
The Design of Pole Placement With Integral Controllers for Gryphon Robot Using Three Evolutionary Algorithms Somayyeh Nalan-Ahmadabad and Sehraneh Ghaemi Abstract In this paper, pole placement with integral
In addition to hybrid swarm intelligence algorithms, another way for an swarm intelligence algorithm to have balance between an swarm intelligence
 xiv Preface Swarm intelligence algorithms are a collection of population-based stochastic optimization algorithms which are generally categorized under the big umbrella of evolutionary computation algorithms.
xiv Preface Swarm intelligence algorithms are a collection of population-based stochastic optimization algorithms which are generally categorized under the big umbrella of evolutionary computation algorithms.
Evolutionary Methods for State-based Testing
 Evolutionary Methods for State-based Testing PhD Student Raluca Lefticaru Supervised by Florentin Ipate University of Piteşti, Romania Department of Computer Science Outline Motivation Search-based software
Evolutionary Methods for State-based Testing PhD Student Raluca Lefticaru Supervised by Florentin Ipate University of Piteşti, Romania Department of Computer Science Outline Motivation Search-based software
CHAPTER 6 HYBRID AI BASED IMAGE CLASSIFICATION TECHNIQUES
 CHAPTER 6 HYBRID AI BASED IMAGE CLASSIFICATION TECHNIQUES 6.1 INTRODUCTION The exploration of applications of ANN for image classification has yielded satisfactory results. But, the scope for improving
CHAPTER 6 HYBRID AI BASED IMAGE CLASSIFICATION TECHNIQUES 6.1 INTRODUCTION The exploration of applications of ANN for image classification has yielded satisfactory results. But, the scope for improving
An improved PID neural network controller for long time delay systems using particle swarm optimization algorithm
 An improved PID neural network controller for long time delay systems using particle swarm optimization algorithm A. Lari, A. Khosravi and A. Alfi Faculty of Electrical and Computer Engineering, Noushirvani
An improved PID neural network controller for long time delay systems using particle swarm optimization algorithm A. Lari, A. Khosravi and A. Alfi Faculty of Electrical and Computer Engineering, Noushirvani
Artificial Bee Colony (ABC) Optimization Algorithm for Solving Constrained Optimization Problems
 Optimization Algorithm for Solving Constrained Optimization Problems") Artificial Bee Colony (ABC) Optimization Algorithm for Solving Constrained Optimization Problems Dervis Karaboga and Bahriye Basturk Erciyes University, Engineering Faculty, The Department of Computer
Artificial Bee Colony (ABC) Optimization Algorithm for Solving Constrained Optimization Problems Dervis Karaboga and Bahriye Basturk Erciyes University, Engineering Faculty, The Department of Computer
PARTICLE SWARM OPTIMIZATION (PSO) [1] is an
![PARTICLE SWARM OPTIMIZATION (PSO) [1] is an](/thumbs/86/93789702.jpg "PARTICLE SWARM OPTIMIZATION (PSO) [1] is an") Proceedings of International Joint Conference on Neural Netorks, Atlanta, Georgia, USA, June -9, 9 Netork-Structured Particle Sarm Optimizer Considering Neighborhood Relationships Haruna Matsushita and
Proceedings of International Joint Conference on Neural Netorks, Atlanta, Georgia, USA, June -9, 9 Netork-Structured Particle Sarm Optimizer Considering Neighborhood Relationships Haruna Matsushita and
Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization
 Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization Lana Dalawr Jalal Abstract This paper addresses the problem of offline path planning for
Three-Dimensional Off-Line Path Planning for Unmanned Aerial Vehicle Using Modified Particle Swarm Optimization Lana Dalawr Jalal Abstract This paper addresses the problem of offline path planning for
Generation of Ultra Side lobe levels in Circular Array Antennas using Evolutionary Algorithms
 Generation of Ultra Side lobe levels in Circular Array Antennas using Evolutionary Algorithms D. Prabhakar Associate Professor, Dept of ECE DVR & Dr. HS MIC College of Technology Kanchikacherla, AP, India.
Generation of Ultra Side lobe levels in Circular Array Antennas using Evolutionary Algorithms D. Prabhakar Associate Professor, Dept of ECE DVR & Dr. HS MIC College of Technology Kanchikacherla, AP, India.
Boolean network robotics
 Boolean network robotics An example of ongoing robotics research Andrea Roli andrea.roli@unibo.it DISI - Dept. of Computer Science and Engineering Campus of Cesena Alma Mater Studiorum Università di Bologna
Boolean network robotics An example of ongoing robotics research Andrea Roli andrea.roli@unibo.it DISI - Dept. of Computer Science and Engineering Campus of Cesena Alma Mater Studiorum Università di Bologna
A Polar Coordinate Particle Swarm Optimiser
 A Polar Coordinate Particle Swarm Optimiser Wiehann Matthysen and Andries P. Engelbrecht Department of Computer Science, University of Pretoria, South Africa engel@cs.up.ac.za Abstract The Particle Swarm
A Polar Coordinate Particle Swarm Optimiser Wiehann Matthysen and Andries P. Engelbrecht Department of Computer Science, University of Pretoria, South Africa engel@cs.up.ac.za Abstract The Particle Swarm
Using Machine Learning to Optimize Storage Systems
 Using Machine Learning to Optimize Storage Systems Dr. Kiran Gunnam 1 Outline 1. Overview 2. Building Flash Models using Logistic Regression. 3. Storage Object classification 4. Storage Allocation recommendation
Using Machine Learning to Optimize Storage Systems Dr. Kiran Gunnam 1 Outline 1. Overview 2. Building Flash Models using Logistic Regression. 3. Storage Object classification 4. Storage Allocation recommendation
Particle Swarm Optimization Methods for Pattern. Recognition and Image Processing
 Particle Swarm Optimization Methods for Pattern Recognition and Image Processing by Mahamed G. H. Omran Submitted in partial fulfillment of the requirements for the degree Philosophiae Doctor in the Faculty
Particle Swarm Optimization Methods for Pattern Recognition and Image Processing by Mahamed G. H. Omran Submitted in partial fulfillment of the requirements for the degree Philosophiae Doctor in the Faculty
Particle Swarm Optimization Approach for Scheduling of Flexible Job Shops
 Particle Swarm Optimization Approach for Scheduling of Flexible Job Shops 1 Srinivas P. S., 2 Ramachandra Raju V., 3 C.S.P Rao. 1 Associate Professor, V. R. Sdhartha Engineering College, Vijayawada 2 Professor,
Particle Swarm Optimization Approach for Scheduling of Flexible Job Shops 1 Srinivas P. S., 2 Ramachandra Raju V., 3 C.S.P Rao. 1 Associate Professor, V. R. Sdhartha Engineering College, Vijayawada 2 Professor,
Initializing the Particle Swarm Optimizer Using the Nonlinear Simplex Method
 Initializing the Particle Swarm Optimizer Using the Nonlinear Simplex Method K.E. PARSOPOULOS, M.N. VRAHATIS Department of Mathematics University of Patras University of Patras Artificial Intelligence
Initializing the Particle Swarm Optimizer Using the Nonlinear Simplex Method K.E. PARSOPOULOS, M.N. VRAHATIS Department of Mathematics University of Patras University of Patras Artificial Intelligence
On Optimizing Command and Control Structures
 On Optimizing Command and Control Structures 16th ICCRTS Gary F. Wheatley Best Paper Presentation Kevin Schultz, David Scheidt, {kevin.schultz, david.scheidt}@jhuapl.edu This work was funded in part by
On Optimizing Command and Control Structures 16th ICCRTS Gary F. Wheatley Best Paper Presentation Kevin Schultz, David Scheidt, {kevin.schultz, david.scheidt}@jhuapl.edu This work was funded in part by
Implementation and Comparison between PSO and BAT Algorithms for Path Planning with Unknown Environment
 Implementation and Comparison between PSO and BAT Algorithms for Path Planning with Unknown Environment Dr. Mukesh Nandanwar 1, Anuj Nandanwar 2 1 Assistance Professor (CSE), Chhattisgarh Engineering College,
Implementation and Comparison between PSO and BAT Algorithms for Path Planning with Unknown Environment Dr. Mukesh Nandanwar 1, Anuj Nandanwar 2 1 Assistance Professor (CSE), Chhattisgarh Engineering College,
A HYBRID ALGORITHM BASED ON PARTICLE SWARM OPTIMIZATION
 INTERNATIONAL JOURNAL OF INFORMATION AND SYSTEMS SCIENCES Volume 1, Number 3-4, Pages 275-282 2005 Institute for Scientific Computing and Information A HYBRID ALGORITHM BASED ON PARTICLE SWARM OPTIMIZATION
INTERNATIONAL JOURNAL OF INFORMATION AND SYSTEMS SCIENCES Volume 1, Number 3-4, Pages 275-282 2005 Institute for Scientific Computing and Information A HYBRID ALGORITHM BASED ON PARTICLE SWARM OPTIMIZATION
OPTIMIZATION EVOLUTIONARY ALGORITHMS. Biologically-Inspired and. Computer Intelligence. Wiley. Population-Based Approaches to.
 EVOLUTIONARY OPTIMIZATION ALGORITHMS Biologically-Inspired and Population-Based Approaches to Computer Intelligence Dan Simon Cleveland State University Wiley DETAILED TABLE OF CONTENTS Acknowledgments
EVOLUTIONARY OPTIMIZATION ALGORITHMS Biologically-Inspired and Population-Based Approaches to Computer Intelligence Dan Simon Cleveland State University Wiley DETAILED TABLE OF CONTENTS Acknowledgments
A NEW APPROACH TO SOLVE ECONOMIC LOAD DISPATCH USING PARTICLE SWARM OPTIMIZATION
 A NEW APPROACH TO SOLVE ECONOMIC LOAD DISPATCH USING PARTICLE SWARM OPTIMIZATION Manjeet Singh 1, Divesh Thareja 2 1 Department of Electrical and Electronics Engineering, Assistant Professor, HCTM Technical
A NEW APPROACH TO SOLVE ECONOMIC LOAD DISPATCH USING PARTICLE SWARM OPTIMIZATION Manjeet Singh 1, Divesh Thareja 2 1 Department of Electrical and Electronics Engineering, Assistant Professor, HCTM Technical
PARTICLE Swarm Optimization (PSO), an algorithm by
, an algorithm by") , March 12-14, 2014, Hong Kong Cluster-based Particle Swarm Algorithm for Solving the Mastermind Problem Dan Partynski Abstract In this paper we present a metaheuristic algorithm that is inspired by Particle
, March 12-14, 2014, Hong Kong Cluster-based Particle Swarm Algorithm for Solving the Mastermind Problem Dan Partynski Abstract In this paper we present a metaheuristic algorithm that is inspired by Particle
A Genetic Algorithm for Graph Matching using Graph Node Characteristics 1 2
 Chapter 5 A Genetic Algorithm for Graph Matching using Graph Node Characteristics 1 2 Graph Matching has attracted the exploration of applying new computing paradigms because of the large number of applications
Chapter 5 A Genetic Algorithm for Graph Matching using Graph Node Characteristics 1 2 Graph Matching has attracted the exploration of applying new computing paradigms because of the large number of applications
Witold Pedrycz. University of Alberta Edmonton, Alberta, Canada
 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC) Banff Center, Banff, Canada, October 5-8, 2017 Analysis of Optimization Algorithms in Automated Test Pattern Generation for Sequential
2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC) Banff Center, Banff, Canada, October 5-8, 2017 Analysis of Optimization Algorithms in Automated Test Pattern Generation for Sequential
SwarmOps for Java. Numeric & Heuristic Optimization Source-Code Library for Java The Manual Revision 1.0
 Numeric & Heuristic Optimization Source-Code Library for Java The Manual Revision 1.0 By Magnus Erik Hvass Pedersen June 2011 Copyright 2009-2011, all rights reserved by the author. Please see page 4 for
Numeric & Heuristic Optimization Source-Code Library for Java The Manual Revision 1.0 By Magnus Erik Hvass Pedersen June 2011 Copyright 2009-2011, all rights reserved by the author. Please see page 4 for
Genetic.io. Genetic Algorithms in all their shapes and forms! Genetic.io Make something of your big data
 Genetic Algorithms in all their shapes and forms! Julien Sebrien Self-taught, passion for development. Java, Cassandra, Spark, JPPF. @jsebrien, julien.sebrien@genetic.io Distribution of IT solutions (SaaS,
Genetic Algorithms in all their shapes and forms! Julien Sebrien Self-taught, passion for development. Java, Cassandra, Spark, JPPF. @jsebrien, julien.sebrien@genetic.io Distribution of IT solutions (SaaS,
HPSOM: A HYBRID PARTICLE SWARM OPTIMIZATION ALGORITHM WITH GENETIC MUTATION. Received February 2012; revised June 2012
 International Journal of Innovative Computing, Information and Control ICIC International c 2013 ISSN 1349-4198 Volume 9, Number 5, May 2013 pp. 1919 1934 HPSOM: A HYBRID PARTICLE SWARM OPTIMIZATION ALGORITHM
International Journal of Innovative Computing, Information and Control ICIC International c 2013 ISSN 1349-4198 Volume 9, Number 5, May 2013 pp. 1919 1934 HPSOM: A HYBRID PARTICLE SWARM OPTIMIZATION ALGORITHM
Constraints in Particle Swarm Optimization of Hidden Markov Models
 Constraints in Particle Swarm Optimization of Hidden Markov Models Martin Macaš, Daniel Novák, and Lenka Lhotská Czech Technical University, Faculty of Electrical Engineering, Dep. of Cybernetics, Prague,
Constraints in Particle Swarm Optimization of Hidden Markov Models Martin Macaš, Daniel Novák, and Lenka Lhotská Czech Technical University, Faculty of Electrical Engineering, Dep. of Cybernetics, Prague,
Paper ID: 607 ABSTRACT 1. INTRODUCTION. Particle Field Optimization: A New Paradigm for Swarm Intelligence
 Particle Field Optimization: A New Paradigm for Swarm Intelligence Paper ID: 607 ABSTRACT Particle Swarm Optimization (PSO) has been a popular meta-heuristic for black-box optimization for almost two decades.
Particle Field Optimization: A New Paradigm for Swarm Intelligence Paper ID: 607 ABSTRACT Particle Swarm Optimization (PSO) has been a popular meta-heuristic for black-box optimization for almost two decades.
SwarmOps for Matlab. Numeric & Heuristic Optimization Source-Code Library for Matlab The Manual Revision 1.0
 Numeric & Heuristic Optimization Source-Code Library for Matlab The Manual Revision 1.0 By Magnus Erik Hvass Pedersen November 2010 Copyright 2009-2010, all rights reserved by the author. Please see page
Numeric & Heuristic Optimization Source-Code Library for Matlab The Manual Revision 1.0 By Magnus Erik Hvass Pedersen November 2010 Copyright 2009-2010, all rights reserved by the author. Please see page
Automatic differentiation based for particle swarm optimization steepest descent direction
 International Journal of Advances in Intelligent Informatics ISSN: 2442-6571 Vol 1, No 2, July 2015, pp. 90-97 90 Automatic differentiation based for particle swarm optimization steepest descent direction
International Journal of Advances in Intelligent Informatics ISSN: 2442-6571 Vol 1, No 2, July 2015, pp. 90-97 90 Automatic differentiation based for particle swarm optimization steepest descent direction
EVOLVING ENGINEERING DESIGN TRADE-OFFS. Yizhen Zhang Collective Robotics Group
 Proceedings of DETC 3 ASME 23 Design Engineering Technical Conferences and Computers and Information in Engineering Conference Chicago, Illinois USA, September 2-6, 23 DETC23/DTM-48676 EVOLVING ENGINEERING
Proceedings of DETC 3 ASME 23 Design Engineering Technical Conferences and Computers and Information in Engineering Conference Chicago, Illinois USA, September 2-6, 23 DETC23/DTM-48676 EVOLVING ENGINEERING
THE ROLE OF SENSORY-MOTOR COORDINATION Identifying Environmental Motion Dynamics with Dynamic Neural Networks
 THE ROLE OF SENSORY-MOTOR COORDINATION Identifying Environmental Motion Dynamics with Dynamic Neural Networks Stephen Paul McKibbin, Bala Amavasai, Arul N. Selvan, Fabio Caparrelli and W. A. F. W. Othman
THE ROLE OF SENSORY-MOTOR COORDINATION Identifying Environmental Motion Dynamics with Dynamic Neural Networks Stephen Paul McKibbin, Bala Amavasai, Arul N. Selvan, Fabio Caparrelli and W. A. F. W. Othman
ARMA MODEL SELECTION USING PARTICLE SWARM OPTIMIZATION AND AIC CRITERIA. Mark S. Voss a b. and Xin Feng.
 Copyright 2002 IFAC 5th Triennial World Congress, Barcelona, Spain ARMA MODEL SELECTION USING PARTICLE SWARM OPTIMIZATION AND AIC CRITERIA Mark S. Voss a b and Xin Feng a Department of Civil and Environmental
Copyright 2002 IFAC 5th Triennial World Congress, Barcelona, Spain ARMA MODEL SELECTION USING PARTICLE SWARM OPTIMIZATION AND AIC CRITERIA Mark S. Voss a b and Xin Feng a Department of Civil and Environmental
Artificial bee colony algorithm with multiple onlookers for constrained optimization problems
 Artificial bee colony algorithm with multiple onlookers for constrained optimization problems Milos Subotic Faculty of Computer Science University Megatrend Belgrade Bulevar umetnosti 29 SERBIA milos.subotic@gmail.com
Artificial bee colony algorithm with multiple onlookers for constrained optimization problems Milos Subotic Faculty of Computer Science University Megatrend Belgrade Bulevar umetnosti 29 SERBIA milos.subotic@gmail.com
Feeder Reconfiguration Using Binary Coding Particle Swarm Optimization
 488 International Journal Wu-Chang of Control, Wu Automation, and Men-Shen and Systems, Tsai vol. 6, no. 4, pp. 488-494, August 2008 Feeder Reconfiguration Using Binary Coding Particle Swarm Optimization
488 International Journal Wu-Chang of Control, Wu Automation, and Men-Shen and Systems, Tsai vol. 6, no. 4, pp. 488-494, August 2008 Feeder Reconfiguration Using Binary Coding Particle Swarm Optimization
Tracking Changing Extrema with Particle Swarm Optimizer
 Tracking Changing Extrema with Particle Swarm Optimizer Anthony Carlisle Department of Mathematical and Computer Sciences, Huntingdon College antho@huntingdon.edu Abstract The modification of the Particle
Tracking Changing Extrema with Particle Swarm Optimizer Anthony Carlisle Department of Mathematical and Computer Sciences, Huntingdon College antho@huntingdon.edu Abstract The modification of the Particle
SwarmOps for C# Numeric & Heuristic Optimization Source-Code Library for C# The Manual Revision 3.0
 Numeric & Heuristic Optimization Source-Code Library for C# The Manual Revision 3.0 By Magnus Erik Hvass Pedersen January 2011 Copyright 2009-2011, all rights reserved by the author. Please see page 4
Numeric & Heuristic Optimization Source-Code Library for C# The Manual Revision 3.0 By Magnus Erik Hvass Pedersen January 2011 Copyright 2009-2011, all rights reserved by the author. Please see page 4
Grid-Based Genetic Algorithm Approach to Colour Image Segmentation
 Grid-Based Genetic Algorithm Approach to Colour Image Segmentation Marco Gallotta Keri Woods Supervised by Audrey Mbogho Image Segmentation Identifying and extracting distinct, homogeneous regions from
Grid-Based Genetic Algorithm Approach to Colour Image Segmentation Marco Gallotta Keri Woods Supervised by Audrey Mbogho Image Segmentation Identifying and extracting distinct, homogeneous regions from
Using Genetic Algorithms to optimize ACS-TSP
 Using Genetic Algorithms to optimize ACS-TSP Marcin L. Pilat and Tony White School of Computer Science, Carleton University, 1125 Colonel By Drive, Ottawa, ON, K1S 5B6, Canada {mpilat,arpwhite}@scs.carleton.ca
Using Genetic Algorithms to optimize ACS-TSP Marcin L. Pilat and Tony White School of Computer Science, Carleton University, 1125 Colonel By Drive, Ottawa, ON, K1S 5B6, Canada {mpilat,arpwhite}@scs.carleton.ca
Using CODEQ to Train Feed-forward Neural Networks
 Using CODEQ to Train Feed-forward Neural Networks Mahamed G. H. Omran 1 and Faisal al-adwani 2 1 Department of Computer Science, Gulf University for Science and Technology, Kuwait, Kuwait omran.m@gust.edu.kw
Using CODEQ to Train Feed-forward Neural Networks Mahamed G. H. Omran 1 and Faisal al-adwani 2 1 Department of Computer Science, Gulf University for Science and Technology, Kuwait, Kuwait omran.m@gust.edu.kw
Neural Network Weight Selection Using Genetic Algorithms
 Neural Network Weight Selection Using Genetic Algorithms David Montana presented by: Carl Fink, Hongyi Chen, Jack Cheng, Xinglong Li, Bruce Lin, Chongjie Zhang April 12, 2005 1 Neural Networks Neural networks
Neural Network Weight Selection Using Genetic Algorithms David Montana presented by: Carl Fink, Hongyi Chen, Jack Cheng, Xinglong Li, Bruce Lin, Chongjie Zhang April 12, 2005 1 Neural Networks Neural networks
Particle swarm optimization for mobile network design
 Particle swarm optimization for mobile network design Ayman A. El-Saleh 1,2a), Mahamod Ismail 1, R. Viknesh 2, C. C. Mark 2, and M. L. Chan 2 1 Department of Electrical, Electronics, and Systems Engineering,
Particle swarm optimization for mobile network design Ayman A. El-Saleh 1,2a), Mahamod Ismail 1, R. Viknesh 2, C. C. Mark 2, and M. L. Chan 2 1 Department of Electrical, Electronics, and Systems Engineering,
Evolutionary Algorithms. CS Evolutionary Algorithms 1
 Evolutionary Algorithms CS 478 - Evolutionary Algorithms 1 Evolutionary Computation/Algorithms Genetic Algorithms l Simulate natural evolution of structures via selection and reproduction, based on performance
Evolutionary Algorithms CS 478 - Evolutionary Algorithms 1 Evolutionary Computation/Algorithms Genetic Algorithms l Simulate natural evolution of structures via selection and reproduction, based on performance
4.12 Generalization. In back-propagation learning, as many training examples as possible are typically used.
 1 4.12 Generalization In back-propagation learning, as many training examples as possible are typically used. It is hoped that the network so designed generalizes well. A network generalizes well when
1 4.12 Generalization In back-propagation learning, as many training examples as possible are typically used. It is hoped that the network so designed generalizes well. A network generalizes well when
Improving Tree-Based Classification Rules Using a Particle Swarm Optimization
 Improving Tree-Based Classification Rules Using a Particle Swarm Optimization Chi-Hyuck Jun *, Yun-Ju Cho, and Hyeseon Lee Department of Industrial and Management Engineering Pohang University of Science
Improving Tree-Based Classification Rules Using a Particle Swarm Optimization Chi-Hyuck Jun *, Yun-Ju Cho, and Hyeseon Lee Department of Industrial and Management Engineering Pohang University of Science
Part II. Computational Intelligence Algorithms
 Part II Computational Intelligence Algorithms 126 Chapter 5 Population-based Single-objective Algorithms One bee makes no swarm. French proverb This chapter provides an overview of two CI algorithms that
Part II Computational Intelligence Algorithms 126 Chapter 5 Population-based Single-objective Algorithms One bee makes no swarm. French proverb This chapter provides an overview of two CI algorithms that
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle An Estimation of Distribution Particle Swarm Optimization Algorithm Mudassar Iqbal
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle An Estimation of Distribution Particle Swarm Optimization Algorithm Mudassar Iqbal
DISTANCE EVALUATED SIMULATED KALMAN FILTER FOR COMBINATORIAL OPTIMIZATION PROBLEMS
 DISTANCE EVALUATED SIMULATED KALMAN FILTER FOR COMBINATORIAL OPTIMIZATION PROBLEMS Zulkifli Md Yusof 1, Zuwairie Ibrahim 1, Ismail Ibrahim 1, Kamil Zakwan Mohd Azmi 1, Nor Azlina Ab Aziz 2, Nor Hidayati
DISTANCE EVALUATED SIMULATED KALMAN FILTER FOR COMBINATORIAL OPTIMIZATION PROBLEMS Zulkifli Md Yusof 1, Zuwairie Ibrahim 1, Ismail Ibrahim 1, Kamil Zakwan Mohd Azmi 1, Nor Azlina Ab Aziz 2, Nor Hidayati
GENETIC ALGORITHM with Hands-On exercise
 GENETIC ALGORITHM with Hands-On exercise Adopted From Lecture by Michael Negnevitsky, Electrical Engineering & Computer Science University of Tasmania 1 Objective To understand the processes ie. GAs Basic
GENETIC ALGORITHM with Hands-On exercise Adopted From Lecture by Michael Negnevitsky, Electrical Engineering & Computer Science University of Tasmania 1 Objective To understand the processes ie. GAs Basic