Object Trajectory Proposal via Hierarchical Volume Grouping
|
|
|
- Allan Berry
- 5 years ago
- Views:
Transcription



1 Objec Trajecory Proposal via Hierarchical Volume Grouping Xu Sun 1, Yuanian Wang 1, Tongwei Ren 1,, Zhi Liu 2, Zheng-Jun Zha 3, and Gangshan Wu 1 1 Sae Key Laboraory for Novel Sofware Technology, Nanjing Universiy, Nanjing, China 2 School of Communicaion and Informaion Engineering, Shanghai Universiy, Shanghai, China 3 Universiy of Science and Technology of China, China sunx@smail.nju.edu.cn,wangy@smail.nju.edu.cn,renw@nju.edu.cn,liuzhi@saff.shu.edu.cn,zhazj@usc.edu.cn, gswu@nju.edu.cn ABSTRACT Objec rajecory proposal aims o locae caegory-independen objec candidaes in videos wih a limied number of rajecories, i.e., bounding box sequences. Mos exising mehods, which derive from combining objec proposal wih racking, canno handle objec rajecory proposal effecively due o he lack of comprehensive objecness measuremen hrough analyzing spaio-emporal characerisics over a whole video. In his paper, we propose a novel objec rajecory proposal mehod using hierarchical volume grouping. Specifically, we firs represen a given video wih hierarchical volumes by mapping hierarchical regions wih opical flow. Then, we filer he shor volumes and background volumes, and combinaorially group he reained volumes ino objec candidaes. Finally, we rank he objec candidaes using a muli-modal fusion scoring mechanism, which incorporaes boh appearance objecness and moion objecness, and generae he bounding boxes of he objec candidaes wih he highes scores as he rajecory proposals. We validaed he proposed mehod on a daase consising of 2 videos from ILSVRC216-VID. The experimenal resuls show ha our mehod is superior o he saeof-he-ar objec rajecory proposal mehods. CCS CONCEPTS Arificial inelligence Compuer vision; Hierarchical represenaions; KEYWORDS Objec rajecory proposal, hierarchical volume represenaion, volume combinaorial grouping, muli-modal fusion scoring ACM Reference Forma: Xu Sun 1, Yuanian Wang 1, Tongwei Ren 1,, Zhi Liu 2, Zheng-Jun Zha 3, and Gangshan Wu Objec Trajecory Proposal via Hierarchical Volume Grouping. In ICMR 18: 218 Inernaional Conference on Mulimedia Rerieval, June 11 14, 218, Yokohama, Japan. ACM, New York, NY, USA, 9 pages. hps://doi.org/1145/ Permission o make digial or hard copies of all or par of his work for personal or classroom use is graned wihou fee provided ha copies are no made or disribued for profi or commercial advanage and ha copies bear his noice and he full ciaion on he firs page. Copyrighs for componens of his work owned by ohers han ACM mus be honored. Absracing wih credi is permied. To copy oherwise, or republish, o pos on servers or o redisribue o liss, requires prior specific permission and/or a fee. Reques permissions from permissions@acm.org. ICMR 18, June 11 14, 218, Yokohama, Japan 218 Associaion for Compuing Machinery. ACM ISBN /18/6... $15. hps://doi.org/1145/ objec proposal + racking ours Figure 1: An example of objec rajecory proposal using objec proposal and racking combinaion and our grouping mehod. 1 INTRODUCTION Objec rajecory proposal aims o locae caegory-independen objec candidaes in videos wih a limied number of bounding box sequences named rajecory [29]. These generaed rajecory proposals provide spaio-emporal characerisics of objec candidaes, which can be exraced and analyzed in numerous mulimedia applicaions, such as objec deecion [17], acion recogniion [34], visual relaion deecion [28], objec segmenaion [35] and conenbased video rerieval [7]. A primary sraegy for objec rajecory proposal is o ake advanage of he advances in objec proposal, which is sudied o locae caegory-independen objec candidaes in images wih a limied number of bounding boxes. Mos exising objec rajecory proposal mehods apply objec proposal on one or several seleced video frames, and rack he generaed bounding boxes on oher frames o generae rajecory proposals [11, 21, 3, 39]. Neverheless, i is inracable o auomaically selec one or few video frames ha conain all he objecs appearing in a given video. As shown in he op row of Figure 1, wo objecs are omied because he objec proposal is only applied on he middle frame bu hese wo objecs do no appear in his frame. As he sae-of-hear objec proposal mehods like [9, 43] and objec deecion mehods like [15, 26] can process images in real-ime, some works apply objec proposal densely or even on all he frames o avoid objec omission. Differen o specific objec deecion, such as pedesrian[2, 15], his kind of rajecory proposal mehods can easily obain excessive candidaes, because he feaures of caegory-independen objecs are much more general han hose in paricular caegories. I will lead o high ime consumpion in objec racking and candidae merging. To make maers worse, hese mehods only measure objecness on video frames wih appearance characerisics, bu ignore he characerisics of objec
2 candidaes on oher modaliies, such as moion. Recenly, Shang e al. [29] improve his sraegy by raversing all he video frames wih bounded compuaional cos and parially incorporaing objec moion in objecness measuremen. However, hey sill conduc objecness measuremen independenly on each frame insead of generaing objec candidaes hrough analyzing spaio-emporal characerisics over he whole video. To overcome hese drawbacks, we learn from he advances in objec proposal on images. There are wo sraegies mainly used in objec proposal: window scoring and grouping. The former samples sufficien bounding boxes and selecs he ones wih high objecness scores as proposals, while he laer segmens images ino regions and merges hem ino proposals. Considering here exis enormous possible rajecories in a video which canno be sufficienly sampled, we choose grouping sraegy for conducing objec rajecory proposal in a whole video. Similar o groupingbased objec proposal mehods, here are hree key issues which should be addressed in grouping-based objec rajecory proposal mehods: Firs, how o define a ype of basic uni ha faciliaes grouping o represen various video conen? Second, how o group he basic unis ino objec candidaes even hey have complex composiions? Third, how o score he objec candidaes wih he spaio-emporal characerisics of he video? In his paper, we propose a novel objec rajecory proposal mehod based on hierarchical volume grouping. Figure 2 shows an overview of he proposed mehod. Given a video, we firs represen i wih hierarchical volumes by mapping hierarchical regions wih opical flow. Then, we filer he shor volumes and he background volumes, and group he reained volumes ino objec candidaes. Finally, we rank he objec candidaes by fusing appearance objecness and moion objecness, and generae he bounding boxes for he objec candidaes wih he highes scores as he rajecory proposals. A grouping-based mehod wih a similar framework was proposed in [12]. However, i has obvious limiaions in addressing he aforemenioned key issues of groupingbased objec rajecory proposal (refer o Secion 2.2) which leads o is unsaisfacory performance (refer o Secion 4.3) as compared o ha of our mehod. We validaed he proposed mehod on a daase consising of 2 videos from ILSVRC216-VID [27]. I shows ha our mehod ouperforms he sae-of-he-ar objec rajecory proposal mehods. Our conribuions mainly include: We propose a grouping-based objec rajecory proposal mehod, which generaes rajecory proposals by analyzing he spaio-emporal characerisics over a whole given video. We presen muliple key echniques, namely hierarchical volume represenaion, volume combinaorial grouping, and muli-modal fusion scoring, which can effecively address he key issues in grouping-based objec rajecory proposal. We consruc a daase wih 2 videos from ILSVRC216- VID o validae he performance of he proposed mehod. The experimenal resuls show ha our mehod is superior o he sae-of-he-ar mehods. 2 RELATED WORK 2.1 Objec proposal The exising objec proposal mehods can be roughly classified ino wo caegories: window scoring-based mehods and grouping-based mehods. Window scoring-based mehods measure he objecness of sufficienly sampled bounding boxes and selec he bounding boxes wih high scores as proposals on RGB images [1, 9, 4, 43] and RGB- D images [19]. Generally speaking, window scoring-based mehods are efficien in objec proposal, bu hey easily fail o generae he proposals wih high Inersecion of Union (IoU) o he groundruhs of objecs. Grouping-based mehods segmen images ino regions and merge hem ino proposals on RGB images [2, 23, 33] and RGB- D images [36]. In conras, grouping-based mehods can generae accurae proposals agains he groundruhs, bu hey usually have low efficiency because of he ime-consuming boom-up merging. 2.2 Objec rajecory proposal Mos exising objec rajecory mehods derive from combining objec proposal wih racking. Some mehods mainly focuses on salien objecs [3, 38] or moving objecs [14, 22], while oher mehods exrac objecs in a unified objecness sraegy [8, 11, 18, 21, 29, 39]. As menioned above, hese mehods canno handle objec rajecory proposal effecively due o he lack of comprehensive objecness measuremen hrough analyzing spaioemporal characerisics over he whole video. Dan e al. [12] firs propose a grouping-based objec rajecory proposal mehod using supervoxel clusering. Though Dan s mehod is similar in overview as compared o our mehod, i has some obvious limiaions in addressing he key issues of grouping-based objec rajecory proposal. Firs, Dan s mehod uses he supervoxels generaed by hierarchical clusering as he basic unis in grouping. These supervoxels on he coarses level may no conain he deailed objec porions because of he inaccuracy of clusering. In conras, our mehod represens he video wih hierarchical volume, which conains all he levels for he subsequen grouping. Second, Dan s mehod only merges he supervoxels wih high similariies in grouping, which canno group he objec pars wih differen appearances. In conras, our mehod uses combinaorial grouping, which can combine he neighboring volumes wih significan differences. Third, Dan s mehod does no provide an effecive scoring sraegy, which direcly reas he clusering resul as he proposals. Our mehod presens a mulimodal fusing scoring mechanism o measure appearance objecness and moion objecness ogeher. 2.3 Objec racking Objec racking aims o esimae he exisence and locaions of arge objecs in he subsequen frames. Numerous objec racking mehods have been proposed. For example, sparse represenaion based mehods uilize local sparse represenaions and collaboraive represenaions o deermine he arge locaions [6, 41]; color hisogram based mehods rack arge objecs via pixel level saisics [1, 25] and edge informaion [24, 32]; discriminaive


![background [4, 5].](/docs-images/92/108679307/images/3-2.jpg "Alhough boh racking and rajecory proposal generae bounding box sequences as heir oupus,")










![wih hierarchical regions referring o [23].](/docs-images/92/108679307/images/3-14.jpg "Specifically, we deec he conours in a given video frame and weigh hem in he value range of")
![[, 1] using ulra-meric conour map [3], in which color, brighness and exure gradien are](/docs-images/92/108679307/images/3-15.jpg "combined o provide indexed conours for hierarchical regions.")


, is N L and he number of he regions on all he levels is NR.")






3 hierarchical volume generaion volume combinaorial grouping muli-modal fusion scoring L1 L L3 L4 video frame hierarchical volume objec candidae rajecory proposal Figure 2: An overview of he proposed mehod. model based mehods uilize learned binary classifiers o segmen he arge objecs from background [4, 5]. Alhough boh racking and rajecory proposal generae bounding box sequences as heir oupus, hey are significanly differen. Firs, objec racking requires one or several manually labeled bounding boxes on he firs frame for iniializaion while rajecory proposal searches for objec candidaes on all he frames auomaically. Second, racking only searches for similar regions hrough adjacen frames while rajecory proposal requires o measure objecness for rajecory candidaes and eliminaes hose wih low objecness. Third, he number of he rajecories exraced by rajecory proposal is much larger han he number of hose generaed by racking, which means ha rajecory proposal has sricer compuaional cos limiaion in rajecory generaion. 3 OUR METHOD 3.1 Hierarchical volume represenaion Hierarchical volume is he basic uni of combinaorial grouping in our mehod. A volume is a spaio-emporal componen wihin a given video, which is composed of a sequence of ordered regions. In effecive hierarchical volume represenaion, each volume covers he regions wih he same conen on consecuive frames wih coheren boundaries and accurae duraion on differen levels. Such hierarchical volume represenaion reains boh he principal componens and parial deails of objecs, and helps o generae objec candidaes. Hierarchical region represenaion of video frame. To obain he hierarchical volume represenaion of a video, we firs represen each video frame wih hierarchical regions referring o [23]. Specifically, we deec he conours in a given video frame and weigh hem in he value range of [, 1] using ulra-meric conour map [3], in which color, brighness and exure gradien are combined o provide indexed conours for hierarchical regions. Based on hese conours, we obain he fines region represenaion of he video frame. Then, we merge hese regions ieraively by removing he conours whose srenghs are lower han an incremenal hreshold from a se of rained hresholds. The regions surrounded wih he res of closed conours in each ieraion are consruced as he hierarchical regions. To each frame f, assume he number of leaf regions (i.e., he regions on he fines level), is N L and he number of he regions on all he levels is NR. We consruc a binary marix C in size of NR N L o denoe he coverage relaionships beween hierarchical regions and leaf regions. Here, Ci, j equals 1 if he ih hierarchical region covers he jh leaf region; oherwise, i equals. Volume generaion by region mapping. We map he hierarchical regions on adjacen video frames o generae hierarchical volumes. Raher han direcly searching he mos similar region for each region in he subsequen frame, which is very ime consuming, we uilize opical flow o esablish he mapping relaionships beween regions on adjacen frames, because opical flow esimaion is only required o conduc once for a whole frame and i can be used for he mapping of all he regions in he frame. We firs esimae bidirecional dense opical flow using Deepflow [37], which effecively handles large displacemens in videos via dense correspondences maching. To wo adjacen video frames f and f +1, we consruc wo marices O +1 in size of NL NL +1 and O +1 in size of NL +1 NL o denoe he mapping relaionships beween he leaf regions in f and f +1. Specifically, Oi, +1 j denoes he number of he pixels in he ih leaf region in f whose corresponding pixels mapped wih he opical flow from f o f +1 belong o he jh leaf region in f +1 : O +1 i, j = P +1 i P +1 j, (1) where Pi +1 is he se of he pixels in f +1 which are mapped wih opical flow from he pixels in he ih leaf region in f ; Pj +1 denoes he se of he pixels belonging o he jh leaf region in f +1 ; denoes he cardinaliy of a se, i.e., he number of pixels wihin a se. The elemens in O +1 are defined in a similar manner. Based on he region coverage marix and he leaf region mapping marix, we map he hierarchical regions beween he adjacen frames. To f and f +1, we consruc wo marices M +1 in size of NR N R +1 and M +1 in size of NR +1 NR o denoe he mapping relaionships beween he hierarchical regions in f and
4 f +1 : M +1 = C O +1 (C +1 ) T, (2) M +1 = C +1 O +1 (C ) T. (3) where each elemen M +1 i, j in M +1 denoes he number of he pixels in he ih region in f whose corresponding pixels mapped wih he opical flow from f o f +1 belong o he jh region in f +1. The elemens in M +1 are defined in a similar manner. We normalize he elemens in M +1 o consruc a marix Ψ +1 as follows: Ψi, +1 j = Mi, +1 j / Qi, (4) where Qi denoes he se of he pixels belong o he ih hierarchical region in f ; denoes he cardinaliy of a se. We can consruc a marix Ψ +1 from M +1 in a similar manner. To each hierarchical region in f, we search is mapping region in f +1 by checking he elemens in he ih row in Ψ +1 and he ih column in Ψ +1. If boh Ψi, +1 j and Ψ +1 j,i are larger han a predefined hreshold, which equals in our experimens, we consider he ih region in f is mapped o he jh region in f +1 successfully and merge hem ino a volume. If a region in f is mapped o more han one regions in f +1, we selec he one wih he highes mapping score, i.e., he sum of Ψi, +1 j and Ψ +1 j,i. We repea he above procedure from he firs frame o he las one, and generae hierarchical volumes by merging he mapped regions. Noe here, we map he hierarchical regions and reain he volumes on all he levels for he subsequen grouping, i.e., one volume generaed by our mehod may conain anoher volume or is porions. In conras, supervoxels in [12] are generaed by hierarchical clusering of single level superpixels, which only consis of he coarses regions and have no overlap beween each oher. There are wo advanages of our hierarchical volume represenaion as compared o hierarchical supervoxel in [12]. On he one hand, i is difficul o find appropriae relaionships when direcly mapping he regions in he adjacen frames on superpixel level. In fac, we canno generae he volumes wih long lenghs (he lengh of a volume denoes he number of he regions belonging o he volume) by mapping he leaf regions in he experimens unless we relax he mapping hreshold o a small value. I leads o he generaed supervoxels wih low cohesion and prevens he effeciveness of he supervoxel represenaion in [12]. On he oher hand, boh he generaion of hierarchical volume and supervoxel are only based on low-level feaures, which ineviably brings in inaccuracy. If only using he supervoxels composed of he coarses regions [12], he deailed objec porions los in clusering canno be obained in grouping. I will furher cause he inaccuracy of generaing rajecory proposals. As comparison, our mehod generaes he volumes in differen levels and reains mos of hem, which will provide more comprehensive candidaes in grouping. Broken volume connecion. Our hierarchical volume represenaion maps he regions based on opical flow, bu opical flow only represens he low-level similariy beween pixels in adjacen frames. I is easy o generae broken volumes because opical flow is sensiive o parial occlusion and illuminaion variaion. These broken volumes increase he complexiy of grouping hem ino he objec candidaes. Hence, we connec he volumes, which may represen he same conen, based on heir high-level appearance similariies. Assume v i and v j are wo volumes, and v i ends before v j sars. We rack he bounding box of he region, which belongs o v i in is end frame, using kernelized correlaion filer racker [16]. If he racked bounding box in he sar frame of v j has large enough IoU o he bounding box of he region belonging o v j in he same frame, we consider ha v i and v j can be conneced. In our implemenaion, we filer he volumes wih exremely shor lenghs for efficiency, which are less han 1 frames in our experimens, and sor all he reained volumes ino wo queues q s and q e based on heir sar frames and end frames. To each volumev in q e, we check wheher exis volumes saring in a shor emporal inerval afer v ends, which equals 4 frames in our experimens. If so, we greedily connec v o hese volumes by racking, i.e., we only connec a volume o he firs volume which can be conneced o i. The IoU hreshold for connecion in our experimens is se o. Because he number of volumes ha sar in a shor emporal inerval afer each volume can be reaed as a consan and only once raversal is required for q e, he ime complexiy of volume connec is O(N V log N V ), here N V is he number of volumes afer filering. 3.2 Volume combinaorial grouping Adapive shor volume filering. Considering mos objecs are visible for relaively long duraions in videos, he volumes wih shor lenghs are usually useless for generaing objec candidaes. Preliminary filering of such shor volumes can decrease he number of volumes and effecively reduce he compuaional complexiy of volume grouping. Considering he variaion of video lenghs, we use an adapive hreshold in shor volume filering. On he one hand, we consider ha he volumes conribuive o objec candidae generaion should be visible for more han a cerain duraion, for example, one second (2 frames) in our experimens. On he oher hand, o avoid oo sric filering for shor videos, we require ha he lengh of he filered volumes should be no larger han a cerain raio of he lengh of he whole video, such as 2% in our experimens. Hence, he final hreshold κ for shor volume filering is calculaed as: κ = min(2, V ), (5) where V denoes he lengh of he whole video. Background volume eliminaion. The volumes conaining background conen usually have long lenghs because he sabiliy in background appearance helps o region mapping in hierarchical volume generaion. These background volumes canno be removed in shor volume filering, bu hey hamper rajecory proposal because hey are easy o be grouped wih oher volumes in combinaorial grouping and generae many objec candidaes covering no objecs. To eliminae he background volumes, we calculae he boundary conneciviy of each volume based on ha of he regions belonging o his volume. Assume v i is a volume composed of a region sequence {r k i } k=1,, vi. Here, v i sars in frame f 1 and ends in frame f v i, and v i denoes he lengh of v i. To each region
5 r k i, we calculae is boundary conneciviy B(r k i ) by measuring he exen of is connecion o frame boundary [42] as follows: B(r k i ) = C(r k i ), (6) r k i where C(r k i ) denoes he se of pixels which are on boh he boundaries of r k i and frame f k ; denoes he cardinaliy of a se, i.e., he number of pixels wihin a se or a region. Based on he boundary conneciviy of all he regions belonging o v i, we calculae he boundary conneciviy of v i as follows: B(v i ) = {r k i B(r k i ) > θ, k = 1,, v i }, (7) v i where θ is a boundary conneciviy hreshold, which equals 1 in our experimens referring o [42]. To avoid eliminaing he volumes covering he objecs ha appear in frame boundaries, we use a high hreshold in background volume eliminaion. In our experimens, only he volumes whose boundary conneciviy is larger han.9 will be eliminaed as background. Candidae generaion by volume grouping. Based on he reained volumes, we generae he objec candidaes by grouping hese volumes. Mos exiing mehods conduc grouping based on volume similariy, such as [12]. However, such grouping sraegies usually fail in generaing objec candidaes effecively, because he pars of an objec usually have significan differences in appearance and/or moion. Inspired by [23], we adop a combinaorial grouping sraegy in volume grouping, which only measures he neighborhood relaionships beween volumes while aking no accoun of volume similariy. Considering he neighborhood relaionship beween wo volumes is more complex han ha beween wo regions, e.g., wo volumes may be overlapping, adjacen and disjoined in differen frames, we relax he combinaion condiion in volume grouping from adjacen in [23] o overlapping or adjacen, in order o generae sufficien objec candidaes. Specifically, we firs consruc a binary marix A in size of NL N L o represen he neighborhood relaionship beween he leaf regions in frame f, in which Ai, j equals 1 if he ih leaf region and he jh leaf region in f are adjacen and oherwise. Then, we represen he neighborhood relaionships beween he hierarchical regions in f by a marix Λ in size of NR N R : Λ = C A (C ) T, (8) where C is he coverage relaionship marix defined in Secion 3.1. Here, Λi, j is larger han if he ih region and he jh region in f are overlapping or adjacen, and Λi, j equals if hey are disjoined. Assuming ha wo volumes v i and v j appear in a video wih he common duraion from f 1 o f K, we measure he neighborhood relaionship beween hese wo volumes as follows: Θ(v i,v j ) = K =1 η(r i, r j ) min( v i, v j ), (9) where r i and r j are he regions belonging o v i and v j in f, respecively; η(, ) equals 1 if wo regions are overlapping or adjacen in f and oherwise, which can refer o Λ in Eq. (8); denoes he lengh of a volume. If Θ(v i,v j ) is larger han a hreshold, which equals in our experimens, v i and v j are allowed o group. Based on he consrain in Eq. (9), we group he volumes ino he candidaes conaining from one o four volumes. Similar o [23], we consrain he number of objec candidaes using Pareo fron opimizaion [13] o avoid he combinaorial explosion. In our experimens, volume grouping will erminae if all volume combinaions are exhaused or he number of objec candidaes reaches 1,. 3.3 Muli-modal fusion scoring We measure he objecness of he objec candidaes, and selec he ones wih high scores o generae he final rajecory proposal. In objecness measuremen, we analyze boh appearance objecness and moion objecness of each candidae. The former has been widely used in image proposal [9, 43], and he laer has been validaed is effeciveness in rajecory proposal [29]. As for appearance objecness, we adop he scoring model provided in [23], which is a regressor rained on muli-modal feaures including shape, edges, size and locaion. To each candidae c k, which appears from frame f 1 o f K, we measure he appearance objecness of he grouped regions belonging o c k on each frame, and calculae he appearance objecness score of c k as follows: s A (c k ) = K =1 s A (д k ), (1) c k where s A ( ) denoes appearance objecness score; д k denoes he grouped regions belonging o c k in frame f ; denoes he lengh of a candidae, i.e., he number of he frames ha he candidae appears in. As for moion objecness, we measure he moion conras of an objec candidae o background. We calculae he average moion srengh of all he regions belonging o background volumes (refer o Secion 3.2) on each frame as he moion srengh of background. If no background volume is deeced in some frame, we use he average moion srengh of he whole frame o insead. To each candidae c k, which appears from frame f 1 o f K, we calculae he disance beween he average moion srengh of he grouped regions belonging o c k and ha of background, and calculae he moion objecness score of c k as follows: s M (c k ) = K =1 m k m B, (11) c k where s M (.) denoes moion objecness score; m denoes he k average moion srengh of he grouped regions belonging o c k in frame f ; m B denoes he average moion srengh of background in frame f. We normalize he appearance objecness score and he moion objecness score of each candidae c k o he value range of [, 1], and fuse hem wih linear combinaion as he oal objecness score of c k : s(c k ) = λ s A (c k ) + (1 λ) s M (c k ), (12) where λ is a weigh parameer, which equals o in our experimens o handle he inaccuracy of moion conras in moion objecness measuremen.
6 We rank all he candidaes according o heir objecness scores, generae he bounding boxes of he op seleced candidaes as he rajecory proposals, and preferenially reurn he proposals composed wih less volumes. 4 EXPERIMENTS 4.1 Daase and experimen seings We validaed he performance of he proposed mehod on a daase consising of 2 videos, which are randomly seleced from ILSVRC216-VID [27]. These videos have various conen and conain 3.26 objecs on average. The average objec number of our daase is larger han he one of he whole ILSVRC216-VID daase, which is only 2.6. The manually labeled objec rajecories in ILSVRC216-VID were used as he groundruhs in our experimens. To he bes of our knowledge, i is he larges daase for objec rajecory proposal. We used he evaluaion crieria proposed in [29], namely mean Trajecory IoU () and recall, on he op 5 rajecory proposals for each video. These crieria are defined as follows: mt -IoU = 1 N V recall = 1 N V N V N V 1 N k G k=1 N G k j=1 1 N k G max {T -IoU i, j }, (13) i k=1 N G k δ ( max {T -IoU i, j } τ ), (14) i j=1 where T -IoU i, j denoes he rajecory IoU beween a rajecory proposal T i and a rajecory groundruh G j ; N V is he number of videos; NG k is he number of groundruhs in he kh video; δ is a funcion ha oupus 1 if he inpu is posiive, and oherwise; τ is a hreshold, which equals o in our experimens. All he experimens were conduced on a compuer wih i7 3.5GHz CPU and 32GB memory. For all he mehods in comparison, we used heir defaul seings suggesed by he auhors. 4.2 Componen analysis There are several key echniques incorporaed in our mehod: region mapping, volume represenaion, volume filering and candidae scoring. We validaed heir influences o he performance of our mehod. Region mapping. We use bidirecional opical flow in region mapping o consruc he mapping relaionship beween he regions in adjacen frames (refer o Secion 3.1), which has high compuaional cos. To evaluae he necessiy of bidirecional opical flow, we generae a baseline only using forward opical flow (FOF), which requires half compuaional cos in opical flow esimaion as compared o our mehod. Figure 3 shows he performance of our mehod using differen opical flow in region mapping. We can see ha he performance declines on boh and recall when replacing bidirecional opical flow wih forward opical flow. The reason is ha opical flow esimaion only focuses on pixel-level similariy measuremen even using global consisency consrain, which is sensiive o variable video conen. Once using bidirecional opical flow, we can diminish he influence of opical flow inaccuracy and map he regions more effecively..8 FOF FOF Figure 3: Evaluaion of our mehod using differen opical flow in region mapping on and recall..8 FLV CLV FLV CLV Figure 4: Evaluaion of our mehod using differen volume represenaion on and recall. Volume represenaion. We represen video conen wih hierarchical volumes on all he levels, i.e., one volume may conain anoher volume or is porions (refer o Secion 3.1). Such a volume represenaion can represen boh he principal componens and he deails of objecs. To illusrae he superioriy of our hierarchical volume represenaion, we generae wo baselines: using he fines level volumes (FLV), which are generaed by he fines level regions on each video frame, and using he coarses level volumes (CLV), which merges he regions on each video frame unil he number of regions is no more han 3% of he one of he fines regions and maps hese regions o generae he volumes. Figure 4 shows he performance of our mehod using differen volume represenaions. We can see ha boh FLV and CLV have dramaic drops on and recall. For example, he and recall values obained by CLV on 5 proposals are only half of he ones obained by our mehod. I shows ha only he coarses level volumes, which represen he principal componens of objecs, canno effecively suppor rajecory proposal because all he objec deails are los. Moreover, FLV has worse performance han CLV, which is caused by wo reasons: 1) The leaf regions are difficul o be mapped ino long-duraion fines level volumes due o he inaccuracy of opical flow, which increases he complexiy of volume grouping. 2) Our mehod only groups a mos four volumes ino a candidae o avoid combinaorial explosion, which leads o he candidae grouped by he fines level volumes are usually seriously incomplee agains objecs. I validaes he effeciveness of hierarchical volume for video conen represenaion.
7 .8 NoF SF BF.8 NoF SF BF.8 AO MO.8 AO MO Figure 5: Evaluaion of our mehod using differen volume filering sraegies on and recall. Figure 6: Evaluaion of our mehod using differen candidae scoring mechanisms on and recall. Volume filering. We consider he shor volumes and he background volumes are useless in objec represenaion, and filer hem o reduce he complexiy of volume grouping (refer o Secion 3.2). To illusrae he necessiy of volume filering, we generae hree baselines: wihou shor volume filering or background volume filering (NoF), only filering shor volumes (SF), and only filering background volumes (BF). Figure 5 shows he performance of our mehod using differen volume filering sraegies. We can see ha he performance of NoF is worse han ha using oher volume filering sraegies. Noe here, in broken volume connecion (refer o Secion 3.1), we have filered he volumes whose lenghs are less han 1 frames for efficiency. I means ha NoF acually uses he volume filering sraegy by removing he exremely shor volumes (less han 1 frames) raher han filers nohing. Once increasing he filering hreshold on volume lengh from 1 frames o 2 frames, he performance of SF is improved significanly as compared o NoF. I shows he effeciveness of shor volume filering. Moreover, we can see ha he performance will be improved when filering background volumes, no maer on NoF (i.e., BF) and on SF (i.e., ). I shows ha background volume eliminaion is beneficial o rajecory proposal. Candidae scoring mechanism. We use a muli-modal fusion scoring mechanism in ranking objec candidaes, which fuses boh appearance objecness and moion objecness (refer o Secion 3.3). To validae he effeciveness of our muli-modal fusion scoring mechanism, we generae wo baselines: scoring wih appearance objecness (AO), and scoring wih moion objecness (MO). Figure 6 shows he performance of our mehod using differen scoring sraegies. We can see ha he performance of boh AO and MO is significanly worse han ha of our mehod on and recall, which illusraes he effeciveness of fusing appearance objecness and moion objecness in scoring. Moreover, he performance of MO is only slighly worse han ha of AO. Because objecs usually have differen moions agains background, moion objecness conribues o rajecory proposal especially when objec appearance is complex. 4.3 Comparison wih he sae-of-he-ars To validae he performance of our mehod, we compared i wih hree sae-of-he-ar video objec proposal mehods, namely free objec discovery (FOD) [11], objec rajecory proposal (OTP) [29], and spaio-emporal objec deecion proposal (SODP) [12]. In he.8 FOD OTP SODP EB* MCG* FOD OTP SODP EB* MCG* Figure 7: Evaluaion of differen rajecory proposal mehods on and recall. same way as [29], we generae wo baselines EB* and MCG*, which generae objec proposals on he middle frame of each video and rack he proposals wih KCF racker [16] bidirecionally o generae rajecory proposals. Figure 7 shows he performance of our mehod and five compared mehods. We have: 1) Our mehod is superior o all he compared mehods on boh and recall, which illusraes he effeciveness of our mehod. 2) Though SODP has a similar framework o our mehod, is performance is dramaically worse han ha of our mehod and oher mehods. I shows he effeciveness of he key echniques in our mehods, namely hierarchical volume represenaion, volume combinaorial grouping, and muli-modal fusion scoring. 3) The performance of EB* and MCG* is worse han oher mehods excep SODP, hough EB and MCG are he bes objec proposal mehods on images. I is because hey canno propose he objec rajecories which do no appear on he middle frames of videos (or any oher seleced frames as he sar of rajecory generaion). I illusraes he drawbacks of objec rajecory proposal by combining image objec proposal and racking. 4) Though FOD and OTP aim o address he sar frame problem by raversing all he video frames, heir performance is sill worse han ours. I is because hey canno effecively measure objecness based on spaio-emporal characerisics, and propose objecs independenly on each frame. Figure 8 illusraes several examples of our resuls. In each video example, he rajecory proposal wih he highes o each rajecory groundruh from he op 5 proposals is shown. I




















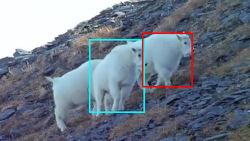





8 Figure 8: Qualiaive examples of objec rajecory proposal using our mehod. In each video example, he bounding boxes wih he same color indicae a rajecory proposal, and he rajecory proposal wih he highes o each rajecory groundruh from he op 5 proposals is shown. Table 1: Comparison wih he sae-of-he-ar mehods and he baselines on ime cos per frame. Mehod Language Time (s) FOD C++ & Pyhon 3.4 OTP C++ & Pyhon 3.4 SODP C++ & Malab & Pyhon 6.7 EB* C++ & Malab 5.5 MCG* C++ & Malab 3.5 C++ & Malab 7.5 shows ha our mehod can handle he videos wih muliple objecs in various conen. We also validaed he efficiency of our mehod. Table 1 shows he ime cos per frame of our mehod and he compared mehods. I shows ha our mehod is comparable o oher grouping-based objec rajecory proposal mehods, such as SODP. The mos ime consuming componen in our mehod is bidirecional opical flow esimaion. I can be acceleraed by GPU [31] o make our mehod more efficien. 4.4 Discussion In he experimens, we found some limiaions of our mehod. As shown in he op row of Figure 9, one goa is omied because i is occluded by wo oher goas wih similar appearances, which leads o serious inaccuracy in volume represenaion. Anoher failure example shown in he boom row of Figure 9. There are many moorcycles and cars wih small sizes are omied. I is because hese small objecs are composed of muliple small volumes, which are easily filered in volume grouping. Moreover, as shown in Table 1, he ime coss of our mehod and oher exising rajecory proposal mehods are sill high, which prevens heir applicaion in real-ime condiions. 5 CONCLUSION In his paper, we proposed an objec rajecory proposal mehod based on hierarchical volume grouping. Three echniques, namely hierarchical volume represenaion, volume combinaorial grouping and muli-modal fusion scoring, were presened o address he key Figure 9: Our failure examples influenced by objec occlusion and small objecs. issues in grouping-based objec rajecory proposal. Benefiing from measuring objecness hrough analyzing spaio-emporal characerisics over a whole video, our mehod can effecively generae he rajecory proposals on he videos wih muliple objecs in various conen. We consruced a daase consising of 2 videos from ILSVRC216-VID daase. The experimenal resuls on he daase show ha our mehod ouperforms he saeof-he-ar objec rajecory proposal mehods. 6 ACKNOWLEDGEMENTS This work is suppored by Naional Science Foundaion of China ( , , ), and Collaboraive Innovaion Cener of Novel Sofware Technology and Indusrializaion. REFERENCES [1] Bogdan Alexe, Thomas Deselaers, and Viorio Ferrari Measuring he Objecness of Image Windows. IEEE Transacions on Paern Analysis & Machine Inelligence 34 (212), [2] Mykhaylo Andriluka, Sefan Roh, and Bern Schiele. 28. People-rackingby-deecion and people-deecion-by-racking. In Compuer Vision and Paern Recogniion, 28. CVPR 28. IEEE Conference on [3] P Arbelaez. 26. Boundary Exracion in Naural Images Using Ulrameric Conour Maps. In Compuer Vision and Paern Recogniion Workshop, 26. CVPRW 6. Conference on [4] Shai Avidan. 27. Ensemble Tracking. IEEE Transacions on Paern Analysis & Machine Inelligence 29, 2 (27), [5] Boris Babenko, Ming Hsuan Yang, and Serge Belongie Robus Objec Tracking wih Online Muliple Insance Learning. IEEE Transacions on Paern Analysis & Machine Inelligence 33, 8 (211), 1619.
9 [6] Chenglong Bao, Yi Wu, Haibin Ling, and Hui Ji Real ime robus L1 racker using acceleraed proximal gradien approach. In IEEE Conference on Compuer Vision and Paern Recogniion [7] Rachid Benmokhar and Benoi Hue. 27. Muli-level Fusion for Semanic Video Conen Indexing and Rerieval.. In Inernaional Workshop on Adapive Mulimedia Rerieval [8] Michael Van Den Bergh, Gemma Roig, Xavier Boix, Saniago Manen, and Luc Van Gool Online Video SEEDS for Temporal Window Objecness. In IEEE Inernaional Conference on Compuer Vision [9] Ming-Ming Cheng, Ziming Zhang, Wen-Yan Lin, and Philip H. S. Torr BING: Binarized Normed Gradiens for Objecness Esimaion a 3fps. In IEEE Conference on Compuer Vision and Paern Recogniion [1] Dorin Comaniciu, Visvanahan Ramesh, and Peer Meer. 23. Kernel-Based Objec Tracking. IEEE Transacions on Paern Analysis & Machine Inelligence 25, 5 (23), [11] Giovanni Cuffaro, Federico Becaini, Claudio Baecchi, Lorenzo Seidenari, and Albero Del Bimbo Segmenaion Free Objec Discovery in Video. In European Conference on Compuer Vision workshops [12] Oneaa Dan, Jerome Revaud, Jakob Verbeek, and Cordelia Schmid Spaioemporal Objec Deecion Proposals. In European Conference on Compuer Vision [13] Mahias Ehrgo. 27. Mulicrieria Opimizaion. Springer-Verlag New York, Inc pages. [14] Kaerina Fragkiadaki, Pablo Arbelaez, Panna Felsen, and Jiendra Malik Learning o segmen moving objecs in videos. In IEEE Conference on Compuer Vision and Paern Recogniion [15] L. Van Gool, M. Mahias, R. Timofe, and R. Benenson Pedesrian deecion a 1 frames per second. In Compuer Vision and Paern Recogniion [16] JoÃčo F. Henriques, Caseiro Rui, Pedro Marins, and Jorge Baisa High- Speed Tracking wih Kernelized Correlaion Filers. IEEE Transacions on Paern Analysis & Machine Inelligence 37, 3 (215), [17] Kai Kang, Wanli Ouyang, Hongsheng Li, and Xiaogang Wang Objec Deecion from Video Tubeles wih Convoluional Neural Neworks. In IEEE Conference on Compuer Vision and Paern Recogniion [18] Jianwu Li, Tianfei Zhou, and Yao Lu Learning o generae video objec segmen proposals. In IEEE Inernaional Conference on Mulimedia and Expo [19] Jing Liu, Tongwei Ren, Yuanian Wang, Sheng Hua Zhong, Jia Bei, and Shengchao Chen Objec proposal on RGB-D images via elasic edge boxes. Neurocompuing 236 (216). [2] Saniago Manen, Mahieu Guillaumin, and Luc J. Van Gool Prime Objec Proposals wih Randomized Prim s Algorihm. In IEEE Inernaional Conference on Compuer Vision [21] Liang Peng and Xiaojun Qi Temporal objecness: Model-free learning of objec proposals in video. In IEEE Inernaional Conference on Image Processing [22] Federico Perazzi, Oliver Wang, Markus Gross, and Alexander Sorkine-Hornung Fully Conneced Objec Proposals for Video Segmenaion. In IEEE Inernaional Conference on Compuer Vision [23] Jordi Ponuse, Pablo Arbelaez, Jonahan Barron, Ferran Marques, and Jiendra Malik Muliscale Combinaorial Grouping for Image Segmenaion and Objec Proposal Generaion. IEEE Transacions on Paern Analysis & Machine Inelligence 39, 1 (216), [24] Faih Porikli. 25. Inegral Hisogram: A Fas Way To Exrac Hisograms in Caresian Spaces. In IEEE Conference on Compuer Vision and Paern Recogniion [25] P. PÃľrez, C. Hue, J. Vermaak, and M. Gangne. 22. Color-Based Probabilisic Tracking. In European Conference on Compuer Vision [26] Joseph Redmon and Ali Farhadi YOLO9: Beer, Faser, Sronger. (216), [27] Olga Russakovsky, Jia Deng, Hao Su, Jonahan Krause, Sanjeev Saheesh, Sean Ma, Zhiheng Huang, Andrej Karpahy, Adiya Khosla, and Michael Bernsein ImageNe Large Scale Visual Recogniion Challenge. Inernaional Journal of Compuer Vision 115, 3 (215), [28] Xindi Shang, Tongwei Ren, Jingfan Guo, Hanwang Zhang, and Ta-Seng Chua Video Visual Relaion Deecion. In ACM Inernaional Conference on Mulimedia. Mounain View, CA USA. [29] Xindi Shang, Tongwei Ren, Hanwang Zhang, Gangshan Wu, and Ta Seng Chua Objec rajecory proposal. In IEEE Inernaional Conference on Mulimedia and Expo [3] Gilad Sharir and Tinne Tuyelaars Video objec proposals. In IEEE Conference on Compuer Vision and Paern Recogniion Workshops [31] Narayanan Sundaram, Thomas Brox, and Kur Keuzer. 21. Dense poin rajecories by GPU-acceleraed large displacemen opical flow. In European Conference on Compuer Vision [32] Feng Tang, S Brennan, Qi Zhao, and Hai Tao. 27. Co-Tracking Using Semi-Supervised Suppor Vecor Machines. In IEEE Inernaional Conference on Compuer Vision [33] Jasper R. R. Uijlings, Koen E. A. van de Sande, Theo Gevers, and Arnold W. M. Smeulders Selecive Search for Objec Recogniion. Inernaional Journal of Compuer Vision 14, 2 (213), [34] Heng Wang, A. Klaser, C. Schmid, and Cheng Lin Liu Acion recogniion by dense rajecories. In IEEE Conference on Compuer Vision and Paern Recogniion [35] Wenguan Wang, Jianbing Shen, and F Porikli Saliency-aware geodesic video objec segmenaion. In IEEE Conference on Compuer Vision and Paern Recogniion [36] Yuanian Wang, Lei Huang, Tongwei Ren, Sheng-Hua Zhong, Yan Liu, and Gangshan Wu Objec Proposal via Deph Conneciviy Consrained Grouping. In Pacific-Rim Conference on Mulimedia [37] Philippe Weinzaepfel, Jerome Revaud, Zaid Harchaoui, and Cordelia Schmid DeepFlow: Large Displacemen Opical Flow wih Deep Maching. In IEEE Inernaional Conference on Compuer Vision [38] Fanyi Xiao and Jae Lee Yong Track and Segmen: An Ieraive Unsupervised Approach for Video Objec Proposals. In IEEE Conference on Compuer Vision and Paern Recogniion [39] Jae Lee Yong, Jaechul Kim, and Krisen Grauman Key-segmens for video objec segmenaion. In Inernaional Conference on Compuer Vision [4] Ziming Zhang, Yun Liu, Xi Chen, Yanjun Zhu, Ming Ming Cheng, Venkaesh Saligrama, and Philip H. S. Torr Sequenial Opimizaion for Efficien High-Qualiy Objec Proposal Generaion. IEEE Transacions on Paern Analysis & Machine Inelligence PP, 99 (215), 1 1. [41] W. Zhong, H. Lu, and M. H. Yang Robus objec racking via sparse collaboraive appearance model. IEEE Transacions onimage Processing 23, 5 (214), [42] Wangjiang Zhu, Shuang Liang, Yichen Wei, and Jian Sun Saliency Opimizaion from Robus Background Deecion. In Compuer Vision and Paern Recogniion [43] C. Lawrence Zinick and Pior Dollár Edge Boxes: Locaing Objec Proposals from Edges. In European Conference on Compuer Vision
A Matching Algorithm for Content-Based Image Retrieval
 A Maching Algorihm for Conen-Based Image Rerieval Sue J. Cho Deparmen of Compuer Science Seoul Naional Universiy Seoul, Korea Absrac Conen-based image rerieval sysem rerieves an image from a daabase using
A Maching Algorihm for Conen-Based Image Rerieval Sue J. Cho Deparmen of Compuer Science Seoul Naional Universiy Seoul, Korea Absrac Conen-based image rerieval sysem rerieves an image from a daabase using
STEREO PLANE MATCHING TECHNIQUE
 STEREO PLANE MATCHING TECHNIQUE Commission III KEY WORDS: Sereo Maching, Surface Modeling, Projecive Transformaion, Homography ABSTRACT: This paper presens a new ype of sereo maching algorihm called Sereo
STEREO PLANE MATCHING TECHNIQUE Commission III KEY WORDS: Sereo Maching, Surface Modeling, Projecive Transformaion, Homography ABSTRACT: This paper presens a new ype of sereo maching algorihm called Sereo
Wheelchair-user Detection Combined with Parts-based Tracking
 Wheelchair-user Deecion Combined wih Pars-based Tracking Ukyo Tanikawa 1, Yasuomo Kawanishi 1, Daisuke Deguchi 2,IchiroIde 1, Hiroshi Murase 1 and Ryo Kawai 3 1 Graduae School of Informaion Science, Nagoya
Wheelchair-user Deecion Combined wih Pars-based Tracking Ukyo Tanikawa 1, Yasuomo Kawanishi 1, Daisuke Deguchi 2,IchiroIde 1, Hiroshi Murase 1 and Ryo Kawai 3 1 Graduae School of Informaion Science, Nagoya
Video Content Description Using Fuzzy Spatio-Temporal Relations
 Proceedings of he 4s Hawaii Inernaional Conference on Sysem Sciences - 008 Video Conen Descripion Using Fuzzy Spaio-Temporal Relaions rchana M. Rajurkar *, R.C. Joshi and Sananu Chaudhary 3 Dep of Compuer
Proceedings of he 4s Hawaii Inernaional Conference on Sysem Sciences - 008 Video Conen Descripion Using Fuzzy Spaio-Temporal Relaions rchana M. Rajurkar *, R.C. Joshi and Sananu Chaudhary 3 Dep of Compuer
Evaluation and Improvement of Region-based Motion Segmentation
 Evaluaion and Improvemen of Region-based Moion Segmenaion Mark Ross Universiy Koblenz-Landau, Insiue of Compuaional Visualisics, Universiässraße 1, 56070 Koblenz, Germany Email: ross@uni-koblenz.de Absrac
Evaluaion and Improvemen of Region-based Moion Segmenaion Mark Ross Universiy Koblenz-Landau, Insiue of Compuaional Visualisics, Universiässraße 1, 56070 Koblenz, Germany Email: ross@uni-koblenz.de Absrac
Image segmentation. Motivation. Objective. Definitions. A classification of segmentation techniques. Assumptions for thresholding
 Moivaion Image segmenaion Which pixels belong o he same objec in an image/video sequence? (spaial segmenaion) Which frames belong o he same video sho? (emporal segmenaion) Which frames belong o he same
Moivaion Image segmenaion Which pixels belong o he same objec in an image/video sequence? (spaial segmenaion) Which frames belong o he same video sho? (emporal segmenaion) Which frames belong o he same
A Face Detection Method Based on Skin Color Model
 A Face Deecion Mehod Based on Skin Color Model Dazhi Zhang Boying Wu Jiebao Sun Qinglei Liao Deparmen of Mahemaics Harbin Insiue of Technology Harbin China 150000 Zhang_dz@163.com mahwby@hi.edu.cn sunjiebao@om.com
A Face Deecion Mehod Based on Skin Color Model Dazhi Zhang Boying Wu Jiebao Sun Qinglei Liao Deparmen of Mahemaics Harbin Insiue of Technology Harbin China 150000 Zhang_dz@163.com mahwby@hi.edu.cn sunjiebao@om.com
Implementing Ray Casting in Tetrahedral Meshes with Programmable Graphics Hardware (Technical Report)
") Implemening Ray Casing in Terahedral Meshes wih Programmable Graphics Hardware (Technical Repor) Marin Kraus, Thomas Erl March 28, 2002 1 Inroducion Alhough cell-projecion, e.g., [3, 2], and resampling,
Implemening Ray Casing in Terahedral Meshes wih Programmable Graphics Hardware (Technical Repor) Marin Kraus, Thomas Erl March 28, 2002 1 Inroducion Alhough cell-projecion, e.g., [3, 2], and resampling,
EECS 487: Interactive Computer Graphics
 EECS 487: Ineracive Compuer Graphics Lecure 7: B-splines curves Raional Bézier and NURBS Cubic Splines A represenaion of cubic spline consiss of: four conrol poins (why four?) hese are compleely user specified
EECS 487: Ineracive Compuer Graphics Lecure 7: B-splines curves Raional Bézier and NURBS Cubic Splines A represenaion of cubic spline consiss of: four conrol poins (why four?) hese are compleely user specified
Robust Multi-view Face Detection Using Error Correcting Output Codes
 Robus Muli-view Face Deecion Using Error Correcing Oupu Codes Hongming Zhang,2, Wen GaoP P, Xilin Chen 2, Shiguang Shan 2, and Debin Zhao Deparmen of Compuer Science and Engineering, Harbin Insiue of Technolog
Robus Muli-view Face Deecion Using Error Correcing Oupu Codes Hongming Zhang,2, Wen GaoP P, Xilin Chen 2, Shiguang Shan 2, and Debin Zhao Deparmen of Compuer Science and Engineering, Harbin Insiue of Technolog
IntentSearch:Capturing User Intention for One-Click Internet Image Search
 JOURNAL OF L A T E X CLASS FILES, VOL. 6, NO. 1, JANUARY 2010 1 InenSearch:Capuring User Inenion for One-Click Inerne Image Search Xiaoou Tang, Fellow, IEEE, Ke Liu, Jingyu Cui, Suden Member, IEEE, Fang
JOURNAL OF L A T E X CLASS FILES, VOL. 6, NO. 1, JANUARY 2010 1 InenSearch:Capuring User Inenion for One-Click Inerne Image Search Xiaoou Tang, Fellow, IEEE, Ke Liu, Jingyu Cui, Suden Member, IEEE, Fang
MORPHOLOGICAL SEGMENTATION OF IMAGE SEQUENCES
 MORPHOLOGICAL SEGMENTATION OF IMAGE SEQUENCES B. MARCOTEGUI and F. MEYER Ecole des Mines de Paris, Cenre de Morphologie Mahémaique, 35, rue Sain-Honoré, F 77305 Fonainebleau Cedex, France Absrac. In image
MORPHOLOGICAL SEGMENTATION OF IMAGE SEQUENCES B. MARCOTEGUI and F. MEYER Ecole des Mines de Paris, Cenre de Morphologie Mahémaique, 35, rue Sain-Honoré, F 77305 Fonainebleau Cedex, France Absrac. In image
Video-Based Face Recognition Using Probabilistic Appearance Manifolds
 Video-Based Face Recogniion Using Probabilisic Appearance Manifolds Kuang-Chih Lee Jeffrey Ho Ming-Hsuan Yang David Kriegman klee10@uiuc.edu jho@cs.ucsd.edu myang@honda-ri.com kriegman@cs.ucsd.edu Compuer
Video-Based Face Recogniion Using Probabilisic Appearance Manifolds Kuang-Chih Lee Jeffrey Ho Ming-Hsuan Yang David Kriegman klee10@uiuc.edu jho@cs.ucsd.edu myang@honda-ri.com kriegman@cs.ucsd.edu Compuer
MODEL BASED TECHNIQUE FOR VEHICLE TRACKING IN TRAFFIC VIDEO USING SPATIAL LOCAL FEATURES
 MODEL BASED TECHNIQUE FOR VEHICLE TRACKING IN TRAFFIC VIDEO USING SPATIAL LOCAL FEATURES Arun Kumar H. D. 1 and Prabhakar C. J. 2 1 Deparmen of Compuer Science, Kuvempu Universiy, Shimoga, India ABSTRACT
MODEL BASED TECHNIQUE FOR VEHICLE TRACKING IN TRAFFIC VIDEO USING SPATIAL LOCAL FEATURES Arun Kumar H. D. 1 and Prabhakar C. J. 2 1 Deparmen of Compuer Science, Kuvempu Universiy, Shimoga, India ABSTRACT
Detection and segmentation of moving objects in highly dynamic scenes
 Deecion and segmenaion of moving objecs in highly dynamic scenes Aurélie Bugeau Parick Pérez INRIA, Cenre Rennes - Breagne Alanique Universié de Rennes, Campus de Beaulieu, 35 042 Rennes Cedex, France
Deecion and segmenaion of moving objecs in highly dynamic scenes Aurélie Bugeau Parick Pérez INRIA, Cenre Rennes - Breagne Alanique Universié de Rennes, Campus de Beaulieu, 35 042 Rennes Cedex, France
A Bayesian Approach to Video Object Segmentation via Merging 3D Watershed Volumes
 A Bayesian Approach o Video Objec Segmenaion via Merging 3D Waershed Volumes Yu-Pao Tsai 1,3, Chih-Chuan Lai 1,2, Yi-Ping Hung 1,2, and Zen-Chung Shih 3 1 Insiue of Informaion Science, Academia Sinica,
A Bayesian Approach o Video Objec Segmenaion via Merging 3D Waershed Volumes Yu-Pao Tsai 1,3, Chih-Chuan Lai 1,2, Yi-Ping Hung 1,2, and Zen-Chung Shih 3 1 Insiue of Informaion Science, Academia Sinica,
Improved TLD Algorithm for Face Tracking
 Absrac Improved TLD Algorihm for Face Tracking Huimin Li a, Chaojing Yu b and Jing Chen c Chongqing Universiy of Poss and Telecommunicaions, Chongqing 400065, China a li.huimin666@163.com, b 15023299065@163.com,
Absrac Improved TLD Algorihm for Face Tracking Huimin Li a, Chaojing Yu b and Jing Chen c Chongqing Universiy of Poss and Telecommunicaions, Chongqing 400065, China a li.huimin666@163.com, b 15023299065@163.com,
Detection of salient objects with focused attention based on spatial and temporal coherence
 ricle Informaion Processing Technology pril 2011 Vol.56 No.10: 1055 1062 doi: 10.1007/s11434-010-4387-1 SPECIL TOPICS: Deecion of salien objecs wih focused aenion based on spaial and emporal coherence
ricle Informaion Processing Technology pril 2011 Vol.56 No.10: 1055 1062 doi: 10.1007/s11434-010-4387-1 SPECIL TOPICS: Deecion of salien objecs wih focused aenion based on spaial and emporal coherence
A Hierarchical Object Recognition System Based on Multi-scale Principal Curvature Regions
 A Hierarchical Objec Recogniion Sysem Based on Muli-scale Principal Curvaure Regions Wei Zhang, Hongli Deng, Thomas G Dieerich and Eric N Morensen School of Elecrical Engineering and Compuer Science Oregon
A Hierarchical Objec Recogniion Sysem Based on Muli-scale Principal Curvaure Regions Wei Zhang, Hongli Deng, Thomas G Dieerich and Eric N Morensen School of Elecrical Engineering and Compuer Science Oregon
Visual Indoor Localization with a Floor-Plan Map
 Visual Indoor Localizaion wih a Floor-Plan Map Hang Chu Dep. of ECE Cornell Universiy Ihaca, NY 14850 hc772@cornell.edu Absrac In his repor, a indoor localizaion mehod is presened. The mehod akes firsperson
Visual Indoor Localizaion wih a Floor-Plan Map Hang Chu Dep. of ECE Cornell Universiy Ihaca, NY 14850 hc772@cornell.edu Absrac In his repor, a indoor localizaion mehod is presened. The mehod akes firsperson
Moving Object Detection Using MRF Model and Entropy based Adaptive Thresholding
 Moving Objec Deecion Using MRF Model and Enropy based Adapive Thresholding Badri Narayan Subudhi, Pradipa Kumar Nanda and Ashish Ghosh Machine Inelligence Uni, Indian Saisical Insiue, Kolkaa, 700108, India,
Moving Objec Deecion Using MRF Model and Enropy based Adapive Thresholding Badri Narayan Subudhi, Pradipa Kumar Nanda and Ashish Ghosh Machine Inelligence Uni, Indian Saisical Insiue, Kolkaa, 700108, India,
Improving Ranking of Search Engines Results Based on Power Links
 IPASJ Inernaional Journal of Informaion Technology (IIJIT) Web Sie: hp://www.ipasj.org/iijit/iijit.hm A Publisher for Research Moivaion... Email: edioriiji@ipasj.org Volume 2, Issue 9, Sepember 2014 ISSN
IPASJ Inernaional Journal of Informaion Technology (IIJIT) Web Sie: hp://www.ipasj.org/iijit/iijit.hm A Publisher for Research Moivaion... Email: edioriiji@ipasj.org Volume 2, Issue 9, Sepember 2014 ISSN
TrackNet: Simultaneous Detection and Tracking of Multiple Objects
 TrackNe: Simulaneous Deecion and Tracking of Muliple Objecs Chenge Li New York Universiy cl2840@nyu.edu Gregory Dobler New York Universiy greg.dobler@nyu.edu Yilin Song New York Universiy ys1297@nyu.edu
TrackNe: Simulaneous Deecion and Tracking of Muliple Objecs Chenge Li New York Universiy cl2840@nyu.edu Gregory Dobler New York Universiy greg.dobler@nyu.edu Yilin Song New York Universiy ys1297@nyu.edu
PART 1 REFERENCE INFORMATION CONTROL DATA 6400 SYSTEMS CENTRAL PROCESSOR MONITOR
 . ~ PART 1 c 0 \,).,,.,, REFERENCE NFORMATON CONTROL DATA 6400 SYSTEMS CENTRAL PROCESSOR MONTOR n CONTROL DATA 6400 Compuer Sysems, sysem funcions are normally handled by he Monior locaed in a Peripheral
. ~ PART 1 c 0 \,).,,.,, REFERENCE NFORMATON CONTROL DATA 6400 SYSTEMS CENTRAL PROCESSOR MONTOR n CONTROL DATA 6400 Compuer Sysems, sysem funcions are normally handled by he Monior locaed in a Peripheral
Multi-Target Detection and Tracking from a Single Camera in Unmanned Aerial Vehicles (UAVs)
") 2016 IEEE/RSJ Inernaional Conference on Inelligen Robos and Sysems (IROS) Daejeon Convenion Cener Ocober 9-14, 2016, Daejeon, Korea Muli-Targe Deecion and Tracking from a Single Camera in Unmanned Aerial
2016 IEEE/RSJ Inernaional Conference on Inelligen Robos and Sysems (IROS) Daejeon Convenion Cener Ocober 9-14, 2016, Daejeon, Korea Muli-Targe Deecion and Tracking from a Single Camera in Unmanned Aerial
Research Article Auto Coloring with Enhanced Character Registration
 Compuer Games Technology Volume 2008, Aricle ID 35398, 7 pages doi:0.55/2008/35398 Research Aricle Auo Coloring wih Enhanced Characer Regisraion Jie Qiu, Hock Soon Seah, Feng Tian, Quan Chen, Zhongke Wu,
Compuer Games Technology Volume 2008, Aricle ID 35398, 7 pages doi:0.55/2008/35398 Research Aricle Auo Coloring wih Enhanced Characer Regisraion Jie Qiu, Hock Soon Seah, Feng Tian, Quan Chen, Zhongke Wu,
Joint Feature Learning With Robust Local Ternary Pattern for Face Recognition
 Join Feaure Learning Wih Robus Local Ternary Paern for Face Recogniion Yuvaraju.M 1, Shalini.S 1 Assisan Professor, Deparmen of Elecrical and Elecronics Engineering, Anna Universiy Regional Campus, Coimbaore,
Join Feaure Learning Wih Robus Local Ternary Paern for Face Recogniion Yuvaraju.M 1, Shalini.S 1 Assisan Professor, Deparmen of Elecrical and Elecronics Engineering, Anna Universiy Regional Campus, Coimbaore,
Open Access Research on an Improved Medical Image Enhancement Algorithm Based on P-M Model. Luo Aijing 1 and Yin Jin 2,* u = div( c u ) u
 u") Send Orders for Reprins o reprins@benhamscience.ae The Open Biomedical Engineering Journal, 5, 9, 9-3 9 Open Access Research on an Improved Medical Image Enhancemen Algorihm Based on P-M Model Luo Aijing
Send Orders for Reprins o reprins@benhamscience.ae The Open Biomedical Engineering Journal, 5, 9, 9-3 9 Open Access Research on an Improved Medical Image Enhancemen Algorihm Based on P-M Model Luo Aijing
Robust Visual Tracking for Multiple Targets
 Robus Visual Tracking for Muliple Targes Yizheng Cai, Nando de Freias, and James J. Lile Universiy of Briish Columbia, Vancouver, B.C., Canada, V6T 1Z4 {yizhengc, nando, lile}@cs.ubc.ca Absrac. We address
Robus Visual Tracking for Muliple Targes Yizheng Cai, Nando de Freias, and James J. Lile Universiy of Briish Columbia, Vancouver, B.C., Canada, V6T 1Z4 {yizhengc, nando, lile}@cs.ubc.ca Absrac. We address
Visual Perception as Bayesian Inference. David J Fleet. University of Toronto
 Visual Percepion as Bayesian Inference David J Flee Universiy of Torono Basic rules of probabiliy sum rule (for muually exclusive a ): produc rule (condiioning): independence (def n ): Bayes rule: marginalizaion:
Visual Percepion as Bayesian Inference David J Flee Universiy of Torono Basic rules of probabiliy sum rule (for muually exclusive a ): produc rule (condiioning): independence (def n ): Bayes rule: marginalizaion:
IAJIT First Online Publication
 An Improved Feaure Exracion and Combinaion of Muliple Classifiers for Query-by- ming Naha Phiwma and Parinya Sanguansa 2 Deparmen of Compuer Science, Suan Dusi Rajabha Universiy, Thailand 2 Faculy of Engineering
An Improved Feaure Exracion and Combinaion of Muliple Classifiers for Query-by- ming Naha Phiwma and Parinya Sanguansa 2 Deparmen of Compuer Science, Suan Dusi Rajabha Universiy, Thailand 2 Faculy of Engineering
Image Content Representation
 Image Conen Represenaion Represenaion for curves and shapes regions relaionships beween regions E.G.M. Perakis Image Represenaion & Recogniion 1 Reliable Represenaion Uniqueness: mus uniquely specify an
Image Conen Represenaion Represenaion for curves and shapes regions relaionships beween regions E.G.M. Perakis Image Represenaion & Recogniion 1 Reliable Represenaion Uniqueness: mus uniquely specify an
Real Time Integral-Based Structural Health Monitoring
 Real Time Inegral-Based Srucural Healh Monioring The nd Inernaional Conference on Sensing Technology ICST 7 J. G. Chase, I. Singh-Leve, C. E. Hann, X. Chen Deparmen of Mechanical Engineering, Universiy
Real Time Inegral-Based Srucural Healh Monioring The nd Inernaional Conference on Sensing Technology ICST 7 J. G. Chase, I. Singh-Leve, C. E. Hann, X. Chen Deparmen of Mechanical Engineering, Universiy
Multiple View Discriminative Appearance Modeling with IMCMC for Distributed Tracking
 Muliple View Discriminaive ing wih IMCMC for Disribued Tracking Sanhoshkumar Sunderrajan, B.S. Manjunah Deparmen of Elecrical and Compuer Engineering Universiy of California, Sana Barbara {sanhosh,manj}@ece.ucsb.edu
Muliple View Discriminaive ing wih IMCMC for Disribued Tracking Sanhoshkumar Sunderrajan, B.S. Manjunah Deparmen of Elecrical and Compuer Engineering Universiy of California, Sana Barbara {sanhosh,manj}@ece.ucsb.edu
Learning in Games via Opponent Strategy Estimation and Policy Search
 Learning in Games via Opponen Sraegy Esimaion and Policy Search Yavar Naddaf Deparmen of Compuer Science Universiy of Briish Columbia Vancouver, BC yavar@naddaf.name Nando de Freias (Supervisor) Deparmen
Learning in Games via Opponen Sraegy Esimaion and Policy Search Yavar Naddaf Deparmen of Compuer Science Universiy of Briish Columbia Vancouver, BC yavar@naddaf.name Nando de Freias (Supervisor) Deparmen
Coded Caching with Multiple File Requests
 Coded Caching wih Muliple File Requess Yi-Peng Wei Sennur Ulukus Deparmen of Elecrical and Compuer Engineering Universiy of Maryland College Park, MD 20742 ypwei@umd.edu ulukus@umd.edu Absrac We sudy a
Coded Caching wih Muliple File Requess Yi-Peng Wei Sennur Ulukus Deparmen of Elecrical and Compuer Engineering Universiy of Maryland College Park, MD 20742 ypwei@umd.edu ulukus@umd.edu Absrac We sudy a
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are InechOpen, he world s leading publisher of Open Access books Buil by scieniss, for scieniss 4,000 116,000 120M Open access books available Inernaional auhors and ediors Downloads Our auhors are
We are InechOpen, he world s leading publisher of Open Access books Buil by scieniss, for scieniss 4,000 116,000 120M Open access books available Inernaional auhors and ediors Downloads Our auhors are
Weighted Voting in 3D Random Forest Segmentation
 Weighed Voing in 3D Random Fores Segmenaion M. Yaqub,, P. Mahon 3, M. K. Javaid, C. Cooper, J. A. Noble NDORMS, Universiy of Oxford, IBME, Deparmen of Engineering Science, Universiy of Oxford, 3 MRC Epidemiology
Weighed Voing in 3D Random Fores Segmenaion M. Yaqub,, P. Mahon 3, M. K. Javaid, C. Cooper, J. A. Noble NDORMS, Universiy of Oxford, IBME, Deparmen of Engineering Science, Universiy of Oxford, 3 MRC Epidemiology
CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL
 CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL Klečka Jan Docoral Degree Programme (1), FEEC BUT E-mail: xkleck01@sud.feec.vubr.cz Supervised by: Horák Karel E-mail: horak@feec.vubr.cz
CAMERA CALIBRATION BY REGISTRATION STEREO RECONSTRUCTION TO 3D MODEL Klečka Jan Docoral Degree Programme (1), FEEC BUT E-mail: xkleck01@sud.feec.vubr.cz Supervised by: Horák Karel E-mail: horak@feec.vubr.cz
Robust LSTM-Autoencoders for Face De-Occlusion in the Wild
 IEEE TRANSACTIONS ON IMAGE PROCESSING, DRAFT 1 Robus LSTM-Auoencoders for Face De-Occlusion in he Wild Fang Zhao, Jiashi Feng, Jian Zhao, Wenhan Yang, Shuicheng Yan arxiv:1612.08534v1 [cs.cv] 27 Dec 2016
IEEE TRANSACTIONS ON IMAGE PROCESSING, DRAFT 1 Robus LSTM-Auoencoders for Face De-Occlusion in he Wild Fang Zhao, Jiashi Feng, Jian Zhao, Wenhan Yang, Shuicheng Yan arxiv:1612.08534v1 [cs.cv] 27 Dec 2016
A METHOD OF MODELING DEFORMATION OF AN OBJECT EMPLOYING SURROUNDING VIDEO CAMERAS
 A METHOD OF MODELING DEFORMATION OF AN OBJECT EMLOYING SURROUNDING IDEO CAMERAS Joo Kooi TAN, Seiji ISHIKAWA Deparmen of Mechanical and Conrol Engineering Kushu Insiue of Technolog, Japan ehelan@is.cnl.kuech.ac.jp,
A METHOD OF MODELING DEFORMATION OF AN OBJECT EMLOYING SURROUNDING IDEO CAMERAS Joo Kooi TAN, Seiji ISHIKAWA Deparmen of Mechanical and Conrol Engineering Kushu Insiue of Technolog, Japan ehelan@is.cnl.kuech.ac.jp,
Landmarks: A New Model for Similarity-Based Pattern Querying in Time Series Databases
 Lmarks: A New Model for Similariy-Based Paern Querying in Time Series Daabases Chang-Shing Perng Haixun Wang Sylvia R. Zhang D. So Parker perng@cs.ucla.edu hxwang@cs.ucla.edu Sylvia Zhang@cle.com so@cs.ucla.edu
Lmarks: A New Model for Similariy-Based Paern Querying in Time Series Daabases Chang-Shing Perng Haixun Wang Sylvia R. Zhang D. So Parker perng@cs.ucla.edu hxwang@cs.ucla.edu Sylvia Zhang@cle.com so@cs.ucla.edu
Visually Summarizing the Web using Internal Images and Keyphrases
 Visually Summarizing he Web using Inernal Images and Keyphrases M.V.Gedam, S. A. Taale Deparmen of compuer engineering, PUNE Universiy Vidya Praishhan s College of Engg., India Absrac Visual summarizaion
Visually Summarizing he Web using Inernal Images and Keyphrases M.V.Gedam, S. A. Taale Deparmen of compuer engineering, PUNE Universiy Vidya Praishhan s College of Engg., India Absrac Visual summarizaion
Multi-camera multi-object voxel-based Monte Carlo 3D tracking strategies
 RESEARCH Open Access Muli-camera muli-objec voxel-based Mone Carlo 3D racking sraegies Crisian Canon-Ferrer *, Josep R Casas, Monse Pardàs and Enric Mone Absrac This aricle presens a new approach o he
RESEARCH Open Access Muli-camera muli-objec voxel-based Mone Carlo 3D racking sraegies Crisian Canon-Ferrer *, Josep R Casas, Monse Pardàs and Enric Mone Absrac This aricle presens a new approach o he
A Fast Stereo-Based Multi-Person Tracking using an Approximated Likelihood Map for Overlapping Silhouette Templates
 A Fas Sereo-Based Muli-Person Tracking using an Approximaed Likelihood Map for Overlapping Silhouee Templaes Junji Saake Jun Miura Deparmen of Compuer Science and Engineering Toyohashi Universiy of Technology
A Fas Sereo-Based Muli-Person Tracking using an Approximaed Likelihood Map for Overlapping Silhouee Templaes Junji Saake Jun Miura Deparmen of Compuer Science and Engineering Toyohashi Universiy of Technology
Lecture 18: Mix net Voting Systems
 6.897: Advanced Topics in Crypography Apr 9, 2004 Lecure 18: Mix ne Voing Sysems Scribed by: Yael Tauman Kalai 1 Inroducion In he previous lecure, we defined he noion of an elecronic voing sysem, and specified
6.897: Advanced Topics in Crypography Apr 9, 2004 Lecure 18: Mix ne Voing Sysems Scribed by: Yael Tauman Kalai 1 Inroducion In he previous lecure, we defined he noion of an elecronic voing sysem, and specified
Upper Body Tracking for Human-Machine Interaction with a Moving Camera
 The 2009 IEEE/RSJ Inernaional Conference on Inelligen Robos and Sysems Ocober -5, 2009 S. Louis, USA Upper Body Tracking for Human-Machine Ineracion wih a Moving Camera Yi-Ru Chen, Cheng-Ming Huang, and
The 2009 IEEE/RSJ Inernaional Conference on Inelligen Robos and Sysems Ocober -5, 2009 S. Louis, USA Upper Body Tracking for Human-Machine Ineracion wih a Moving Camera Yi-Ru Chen, Cheng-Ming Huang, and
STRING DESCRIPTIONS OF DATA FOR DISPLAY*
 SLAC-PUB-383 January 1968 STRING DESCRIPTIONS OF DATA FOR DISPLAY* J. E. George and W. F. Miller Compuer Science Deparmen and Sanford Linear Acceleraor Cener Sanford Universiy Sanford, California Absrac
SLAC-PUB-383 January 1968 STRING DESCRIPTIONS OF DATA FOR DISPLAY* J. E. George and W. F. Miller Compuer Science Deparmen and Sanford Linear Acceleraor Cener Sanford Universiy Sanford, California Absrac
BEHAVIOR recognition for human subjects moving in an
 294 IEEE TRANSACTIONS ON EMERGING TOPICS IN COMPUTATIONAL INTELLIGENCE, VOL. 1, NO. 4, AUGUST 2017 Behavior Recogniion Using Muliple Deph Cameras Based on a Time-Varian Skeleon Vecor Projecion Chien-Hao
294 IEEE TRANSACTIONS ON EMERGING TOPICS IN COMPUTATIONAL INTELLIGENCE, VOL. 1, NO. 4, AUGUST 2017 Behavior Recogniion Using Muliple Deph Cameras Based on a Time-Varian Skeleon Vecor Projecion Chien-Hao
Audio Engineering Society. Convention Paper. Presented at the 119th Convention 2005 October 7 10 New York, New York USA
 Audio Engineering Sociey Convenion Paper Presened a he 119h Convenion 2005 Ocober 7 10 New Yor, New Yor USA This convenion paper has been reproduced from he auhor's advance manuscrip, wihou ediing, correcions,
Audio Engineering Sociey Convenion Paper Presened a he 119h Convenion 2005 Ocober 7 10 New Yor, New Yor USA This convenion paper has been reproduced from he auhor's advance manuscrip, wihou ediing, correcions,
Shortest Path Algorithms. Lecture I: Shortest Path Algorithms. Example. Graphs and Matrices. Setting: Dr Kieran T. Herley.
 Shores Pah Algorihms Background Seing: Lecure I: Shores Pah Algorihms Dr Kieran T. Herle Deparmen of Compuer Science Universi College Cork Ocober 201 direced graph, real edge weighs Le he lengh of a pah
Shores Pah Algorihms Background Seing: Lecure I: Shores Pah Algorihms Dr Kieran T. Herle Deparmen of Compuer Science Universi College Cork Ocober 201 direced graph, real edge weighs Le he lengh of a pah
Probabilistic Detection and Tracking of Motion Discontinuities
 Probabilisic Deecion and Tracking of Moion Disconinuiies Michael J. Black David J. Flee Xerox Palo Alo Research Cener 3333 Coyoe Hill Road Palo Alo, CA 94304 fblack,fleeg@parc.xerox.com hp://www.parc.xerox.com/fblack,fleeg/
Probabilisic Deecion and Tracking of Moion Disconinuiies Michael J. Black David J. Flee Xerox Palo Alo Research Cener 3333 Coyoe Hill Road Palo Alo, CA 94304 fblack,fleeg@parc.xerox.com hp://www.parc.xerox.com/fblack,fleeg/
Real-Time Non-Rigid Multi-Frame Depth Video Super-Resolution
 Real-Time Non-Rigid Muli-Frame Deph Video Super-Resoluion Kassem Al Ismaeil 1, Djamila Aouada 1, Thomas Solignac 2, Bruno Mirbach 2, Björn Oersen 1 1 Inerdisciplinary Cenre for Securiy, Reliabiliy, and
Real-Time Non-Rigid Muli-Frame Deph Video Super-Resoluion Kassem Al Ismaeil 1, Djamila Aouada 1, Thomas Solignac 2, Bruno Mirbach 2, Björn Oersen 1 1 Inerdisciplinary Cenre for Securiy, Reliabiliy, and
Stereoscopic Neural Style Transfer
 Sereoscopic Neural Syle Transfer Dongdong Chen 1 Lu Yuan 2, Jing Liao 2, Nenghai Yu 1, Gang Hua 2 1 Universiy of Science and Technology of China 2 Microsof Research cd722522@mail.usc.edu.cn, {luyuan,jliao}@microsof.com,
Sereoscopic Neural Syle Transfer Dongdong Chen 1 Lu Yuan 2, Jing Liao 2, Nenghai Yu 1, Gang Hua 2 1 Universiy of Science and Technology of China 2 Microsof Research cd722522@mail.usc.edu.cn, {luyuan,jliao}@microsof.com,
ACQUIRING high-quality and well-defined depth data. Online Temporally Consistent Indoor Depth Video Enhancement via Static Structure
 SUBMITTED TO TRANSACTION ON IMAGE PROCESSING 1 Online Temporally Consisen Indoor Deph Video Enhancemen via Saic Srucure Lu Sheng, Suden Member, IEEE, King Ngi Ngan, Fellow, IEEE, Chern-Loon Lim and Songnan
SUBMITTED TO TRANSACTION ON IMAGE PROCESSING 1 Online Temporally Consisen Indoor Deph Video Enhancemen via Saic Srucure Lu Sheng, Suden Member, IEEE, King Ngi Ngan, Fellow, IEEE, Chern-Loon Lim and Songnan
Time Expression Recognition Using a Constituent-based Tagging Scheme
 Track: Web Conen Analysis, Semanics and Knowledge Time Expression Recogniion Using a Consiuen-based Tagging Scheme Xiaoshi Zhong and Erik Cambria School of Compuer Science and Engineering Nanyang Technological
Track: Web Conen Analysis, Semanics and Knowledge Time Expression Recogniion Using a Consiuen-based Tagging Scheme Xiaoshi Zhong and Erik Cambria School of Compuer Science and Engineering Nanyang Technological
LAMP: 3D Layered, Adaptive-resolution and Multiperspective Panorama - a New Scene Representation
 Submission o Special Issue of CVIU on Model-based and Image-based 3D Scene Represenaion for Ineracive Visualizaion LAMP: 3D Layered, Adapive-resoluion and Muliperspecive Panorama - a New Scene Represenaion
Submission o Special Issue of CVIU on Model-based and Image-based 3D Scene Represenaion for Ineracive Visualizaion LAMP: 3D Layered, Adapive-resoluion and Muliperspecive Panorama - a New Scene Represenaion
arxiv: v1 [cs.cv] 25 Apr 2017
![arxiv: v1 [cs.cv] 25 Apr 2017](/thumbs/81/84263892.jpg "arxiv: v1 [cs.cv] 25 Apr 2017") Sudheendra Vijayanarasimhan Susanna Ricco svnaras@google.com ricco@google.com... arxiv:1704.07804v1 [cs.cv] 25 Apr 2017 SfM-Ne: Learning of Srucure and Moion from Video Cordelia Schmid Esimaed deph, camera
Sudheendra Vijayanarasimhan Susanna Ricco svnaras@google.com ricco@google.com... arxiv:1704.07804v1 [cs.cv] 25 Apr 2017 SfM-Ne: Learning of Srucure and Moion from Video Cordelia Schmid Esimaed deph, camera
arxiv: v2 [cs.cv] 20 May 2018
![arxiv: v2 [cs.cv] 20 May 2018](/thumbs/80/82483739.jpg "arxiv: v2 [cs.cv] 20 May 2018") Sereoscopic Neural Syle Transfer Dongdong Chen 1 Lu Yuan 2, Jing Liao 2, Nenghai Yu 1, Gang Hua 2 1 Universiy of Science and Technology of China 2 Microsof Research cd722522@mail.usc.edu.cn, {jliao, luyuan,
Sereoscopic Neural Syle Transfer Dongdong Chen 1 Lu Yuan 2, Jing Liao 2, Nenghai Yu 1, Gang Hua 2 1 Universiy of Science and Technology of China 2 Microsof Research cd722522@mail.usc.edu.cn, {jliao, luyuan,
Analysis of Various Types of Bugs in the Object Oriented Java Script Language Coding
 Indian Journal of Science and Technology, Vol 8(21), DOI: 10.17485/ijs/2015/v8i21/69958, Sepember 2015 ISSN (Prin) : 0974-6846 ISSN (Online) : 0974-5645 Analysis of Various Types of Bugs in he Objec Oriened
Indian Journal of Science and Technology, Vol 8(21), DOI: 10.17485/ijs/2015/v8i21/69958, Sepember 2015 ISSN (Prin) : 0974-6846 ISSN (Online) : 0974-5645 Analysis of Various Types of Bugs in he Objec Oriened
Real-time 2D Video/3D LiDAR Registration
 Real-ime 2D Video/3D LiDAR Regisraion C. Bodenseiner Fraunhofer IOSB chrisoph.bodenseiner@iosb.fraunhofer.de M. Arens Fraunhofer IOSB michael.arens@iosb.fraunhofer.de Absrac Progress in LiDAR scanning
Real-ime 2D Video/3D LiDAR Regisraion C. Bodenseiner Fraunhofer IOSB chrisoph.bodenseiner@iosb.fraunhofer.de M. Arens Fraunhofer IOSB michael.arens@iosb.fraunhofer.de Absrac Progress in LiDAR scanning
NEWTON S SECOND LAW OF MOTION
 Course and Secion Dae Names NEWTON S SECOND LAW OF MOTION The acceleraion of an objec is defined as he rae of change of elociy. If he elociy changes by an amoun in a ime, hen he aerage acceleraion during
Course and Secion Dae Names NEWTON S SECOND LAW OF MOTION The acceleraion of an objec is defined as he rae of change of elociy. If he elociy changes by an amoun in a ime, hen he aerage acceleraion during
Design Alternatives for a Thin Lens Spatial Integrator Array
 Egyp. J. Solids, Vol. (7), No. (), (004) 75 Design Alernaives for a Thin Lens Spaial Inegraor Array Hala Kamal *, Daniel V azquez and Javier Alda and E. Bernabeu Opics Deparmen. Universiy Compluense of
Egyp. J. Solids, Vol. (7), No. (), (004) 75 Design Alernaives for a Thin Lens Spaial Inegraor Array Hala Kamal *, Daniel V azquez and Javier Alda and E. Bernabeu Opics Deparmen. Universiy Compluense of
Dynamic Route Planning and Obstacle Avoidance Model for Unmanned Aerial Vehicles
 Volume 116 No. 24 2017, 315-329 ISSN: 1311-8080 (prined version); ISSN: 1314-3395 (on-line version) url: hp://www.ijpam.eu ijpam.eu Dynamic Roue Planning and Obsacle Avoidance Model for Unmanned Aerial
Volume 116 No. 24 2017, 315-329 ISSN: 1311-8080 (prined version); ISSN: 1314-3395 (on-line version) url: hp://www.ijpam.eu ijpam.eu Dynamic Roue Planning and Obsacle Avoidance Model for Unmanned Aerial
Large-scale 3D Outdoor Mapping and On-line Localization using 3D-2D Matching
 Large-scale 3D Oudoor Mapping and On-line Localizaion using 3D-D Maching Takahiro Sakai, Kenji Koide, Jun Miura, and Shuji Oishi Absrac Map-based oudoor navigaion is an acive research area in mobile robos
Large-scale 3D Oudoor Mapping and On-line Localizaion using 3D-D Maching Takahiro Sakai, Kenji Koide, Jun Miura, and Shuji Oishi Absrac Map-based oudoor navigaion is an acive research area in mobile robos
COSC 3213: Computer Networks I Chapter 6 Handout # 7
 COSC 3213: Compuer Neworks I Chaper 6 Handou # 7 Insrucor: Dr. Marvin Mandelbaum Deparmen of Compuer Science York Universiy F05 Secion A Medium Access Conrol (MAC) Topics: 1. Muliple Access Communicaions:
COSC 3213: Compuer Neworks I Chaper 6 Handou # 7 Insrucor: Dr. Marvin Mandelbaum Deparmen of Compuer Science York Universiy F05 Secion A Medium Access Conrol (MAC) Topics: 1. Muliple Access Communicaions:
J. Vis. Commun. Image R.
 J. Vis. Commun. Image R. 20 (2009) 9 27 Conens liss available a ScienceDirec J. Vis. Commun. Image R. journal homepage: www.elsevier.com/locae/jvci Face deecion and racking using a Boosed Adapive Paricle
J. Vis. Commun. Image R. 20 (2009) 9 27 Conens liss available a ScienceDirec J. Vis. Commun. Image R. journal homepage: www.elsevier.com/locae/jvci Face deecion and racking using a Boosed Adapive Paricle
Robot localization under perceptual aliasing conditions based on laser reflectivity using particle filter
 Robo localizaion under percepual aliasing condiions based on laser refleciviy using paricle filer DongXiang Zhang, Ryo Kurazume, Yumi Iwashia, Tsuomu Hasegawa Absrac Global localizaion, which deermines
Robo localizaion under percepual aliasing condiions based on laser refleciviy using paricle filer DongXiang Zhang, Ryo Kurazume, Yumi Iwashia, Tsuomu Hasegawa Absrac Global localizaion, which deermines
Occlusion-Free Hand Motion Tracking by Multiple Cameras and Particle Filtering with Prediction
 58 IJCSNS Inernaional Journal of Compuer Science and Nework Securiy, VOL.6 No.10, Ocober 006 Occlusion-Free Hand Moion Tracking by Muliple Cameras and Paricle Filering wih Predicion Makoo Kao, and Gang
58 IJCSNS Inernaional Journal of Compuer Science and Nework Securiy, VOL.6 No.10, Ocober 006 Occlusion-Free Hand Moion Tracking by Muliple Cameras and Paricle Filering wih Predicion Makoo Kao, and Gang
The Impact of Product Development on the Lifecycle of Defects
 The Impac of Produc Developmen on he Lifecycle of Rudolf Ramler Sofware Compeence Cener Hagenberg Sofware Park 21 A-4232 Hagenberg, Ausria +43 7236 3343 872 rudolf.ramler@scch.a ABSTRACT This paper invesigaes
The Impac of Produc Developmen on he Lifecycle of Rudolf Ramler Sofware Compeence Cener Hagenberg Sofware Park 21 A-4232 Hagenberg, Ausria +43 7236 3343 872 rudolf.ramler@scch.a ABSTRACT This paper invesigaes
LOW-VELOCITY IMPACT LOCALIZATION OF THE COMPOSITE TUBE USING A NORMALIZED CROSS-CORRELATION METHOD
 21 s Inernaional Conference on Composie Maerials Xi an, 20-25 h Augus 2017 LOW-VELOCITY IMPACT LOCALIZATION OF THE COMPOSITE TUBE USING A NORMALIZED CROSS-CORRELATION METHOD Hyunseok Kwon 1, Yurim Park
21 s Inernaional Conference on Composie Maerials Xi an, 20-25 h Augus 2017 LOW-VELOCITY IMPACT LOCALIZATION OF THE COMPOSITE TUBE USING A NORMALIZED CROSS-CORRELATION METHOD Hyunseok Kwon 1, Yurim Park
Rao-Blackwellized Particle Filtering for Probing-Based 6-DOF Localization in Robotic Assembly
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES hp://www.merl.com Rao-Blackwellized Paricle Filering for Probing-Based 6-DOF Localizaion in Roboic Assembly Yuichi Taguchi, Tim Marks, Haruhisa Okuda TR1-8 June
MITSUBISHI ELECTRIC RESEARCH LABORATORIES hp://www.merl.com Rao-Blackwellized Paricle Filering for Probing-Based 6-DOF Localizaion in Roboic Assembly Yuichi Taguchi, Tim Marks, Haruhisa Okuda TR1-8 June
4. Minimax and planning problems
 CS/ECE/ISyE 524 Inroducion o Opimizaion Spring 2017 18 4. Minima and planning problems ˆ Opimizing piecewise linear funcions ˆ Minima problems ˆ Eample: Chebyshev cener ˆ Muli-period planning problems
CS/ECE/ISyE 524 Inroducion o Opimizaion Spring 2017 18 4. Minima and planning problems ˆ Opimizing piecewise linear funcions ˆ Minima problems ˆ Eample: Chebyshev cener ˆ Muli-period planning problems
FACIAL ACTION TRACKING USING PARTICLE FILTERS AND ACTIVE APPEARANCE MODELS. Soumya Hamlaoui & Franck Davoine
 FACIAL ACTION TRACKING USING PARTICLE FILTERS AND ACTIVE APPEARANCE MODELS Soumya Hamlaoui & Franck Davoine HEUDIASYC Mixed Research Uni, CNRS / Compiègne Universiy of Technology BP 20529, 60205 Compiègne
FACIAL ACTION TRACKING USING PARTICLE FILTERS AND ACTIVE APPEARANCE MODELS Soumya Hamlaoui & Franck Davoine HEUDIASYC Mixed Research Uni, CNRS / Compiègne Universiy of Technology BP 20529, 60205 Compiègne
Computer representations of piecewise
 Edior: Gabriel Taubin Inroducion o Geomeric Processing hrough Opimizaion Gabriel Taubin Brown Universiy Compuer represenaions o piecewise smooh suraces have become vial echnologies in areas ranging rom
Edior: Gabriel Taubin Inroducion o Geomeric Processing hrough Opimizaion Gabriel Taubin Brown Universiy Compuer represenaions o piecewise smooh suraces have become vial echnologies in areas ranging rom
Detection Tracking and Recognition of Human Poses for a Real Time Spatial Game
 Deecion Tracking and Recogniion of Human Poses for a Real Time Spaial Game Feifei Huo, Emile A. Hendriks, A.H.J. Oomes Delf Universiy of Technology The Neherlands f.huo@udelf.nl Pascal van Beek, Remco
Deecion Tracking and Recogniion of Human Poses for a Real Time Spaial Game Feifei Huo, Emile A. Hendriks, A.H.J. Oomes Delf Universiy of Technology The Neherlands f.huo@udelf.nl Pascal van Beek, Remco
A Numerical Study on Impact Damage Assessment of PC Box Girder Bridge by Pounding Effect
 A Numerical Sudy on Impac Damage Assessmen of PC Box Girder Bridge by Pounding Effec H. Tamai, Y. Sonoda, K. Goou and Y.Kajia Kyushu Universiy, Japan Absrac When a large earhquake occurs, displacemen response
A Numerical Sudy on Impac Damage Assessmen of PC Box Girder Bridge by Pounding Effec H. Tamai, Y. Sonoda, K. Goou and Y.Kajia Kyushu Universiy, Japan Absrac When a large earhquake occurs, displacemen response
Rule-Based Multi-Query Optimization
 Rule-Based Muli-Query Opimizaion Mingsheng Hong Dep. of Compuer cience Cornell Universiy mshong@cs.cornell.edu Johannes Gehrke Dep. of Compuer cience Cornell Universiy johannes@cs.cornell.edu Mirek Riedewald
Rule-Based Muli-Query Opimizaion Mingsheng Hong Dep. of Compuer cience Cornell Universiy mshong@cs.cornell.edu Johannes Gehrke Dep. of Compuer cience Cornell Universiy johannes@cs.cornell.edu Mirek Riedewald
Relevance Ranking using Kernels
 Relevance Ranking using Kernels Jun Xu 1, Hang Li 1, and Chaoliang Zhong 2 1 Microsof Research Asia, 4F Sigma Cener, No. 49 Zhichun Road, Beijing, China 100190 2 Beijing Universiy of Poss and Telecommunicaions,
Relevance Ranking using Kernels Jun Xu 1, Hang Li 1, and Chaoliang Zhong 2 1 Microsof Research Asia, 4F Sigma Cener, No. 49 Zhichun Road, Beijing, China 100190 2 Beijing Universiy of Poss and Telecommunicaions,
A new algorithm for small object tracking based on super-resolution technique
 A new algorihm for small objec racking based on super-resoluion echnique Yabunayya Habibi, Dwi Rana Sulisyaningrum, and Budi Seiyono Ciaion: AIP Conference Proceedings 1867, 020024 (2017); doi: 10.1063/1.4994427
A new algorihm for small objec racking based on super-resoluion echnique Yabunayya Habibi, Dwi Rana Sulisyaningrum, and Budi Seiyono Ciaion: AIP Conference Proceedings 1867, 020024 (2017); doi: 10.1063/1.4994427
Tracking Appearances with Occlusions
 Tracking ppearances wih Occlusions Ying Wu, Ting Yu, Gang Hua Deparmen of Elecrical & Compuer Engineering Norhwesern Universiy 2145 Sheridan oad, Evanson, IL 60208 {yingwu,ingyu,ganghua}@ece.nwu.edu bsrac
Tracking ppearances wih Occlusions Ying Wu, Ting Yu, Gang Hua Deparmen of Elecrical & Compuer Engineering Norhwesern Universiy 2145 Sheridan oad, Evanson, IL 60208 {yingwu,ingyu,ganghua}@ece.nwu.edu bsrac
Difficulty-aware Hybrid Search in Peer-to-Peer Networks
 Difficuly-aware Hybrid Search in Peer-o-Peer Neworks Hanhua Chen, Hai Jin, Yunhao Liu, Lionel M. Ni School of Compuer Science and Technology Huazhong Univ. of Science and Technology {chenhanhua, hjin}@hus.edu.cn
Difficuly-aware Hybrid Search in Peer-o-Peer Neworks Hanhua Chen, Hai Jin, Yunhao Liu, Lionel M. Ni School of Compuer Science and Technology Huazhong Univ. of Science and Technology {chenhanhua, hjin}@hus.edu.cn
Scale Recovery for Monocular Visual Odometry Using Depth Estimated with Deep Convolutional Neural Fields
 Scale Recovery for Monocular Visual Odomery Using Deph Esimaed wih Deep Convoluional Neural Fields Xiaochuan Yin, Xiangwei Wang, Xiaoguo Du, Qijun Chen Tongji Universiy yinxiaochuan@homail.com,wangxiangwei.cpp@gmail.com,
Scale Recovery for Monocular Visual Odomery Using Deph Esimaed wih Deep Convoluional Neural Fields Xiaochuan Yin, Xiangwei Wang, Xiaoguo Du, Qijun Chen Tongji Universiy yinxiaochuan@homail.com,wangxiangwei.cpp@gmail.com,
Image Based Computer-Aided Manufacturing Technology
 Sensors & Transducers 03 by IFSA hp://www.sensorsporal.com Image Based Compuer-Aided Manufacuring Technology Zhanqi HU Xiaoqin ZHANG Jinze LI Wei LI College of Mechanical Engineering Yanshan Universiy
Sensors & Transducers 03 by IFSA hp://www.sensorsporal.com Image Based Compuer-Aided Manufacuring Technology Zhanqi HU Xiaoqin ZHANG Jinze LI Wei LI College of Mechanical Engineering Yanshan Universiy
A time-space consistency solution for hardware-in-the-loop simulation system
 Inernaional Conference on Advanced Elecronic Science and Technology (AEST 206) A ime-space consisency soluion for hardware-in-he-loop simulaion sysem Zexin Jiang a Elecric Power Research Insiue of Guangdong
Inernaional Conference on Advanced Elecronic Science and Technology (AEST 206) A ime-space consisency soluion for hardware-in-he-loop simulaion sysem Zexin Jiang a Elecric Power Research Insiue of Guangdong
Win, Yuzana; Masada, Tomonari. Citation. Issue Date Right. this work in other works.
 NAOSITE: Nagasaki Universiy's Ac Tile Exploring Technical Phrase Frames f Auhor(s) Ciaion Win, Yuzana; Masada, Tomonari 05 IEEE 9h Inernaional Confer Neworking and Applicaions Worksho Issue Dae 05-04-7
NAOSITE: Nagasaki Universiy's Ac Tile Exploring Technical Phrase Frames f Auhor(s) Ciaion Win, Yuzana; Masada, Tomonari 05 IEEE 9h Inernaional Confer Neworking and Applicaions Worksho Issue Dae 05-04-7
Vision-Based Traffic Measurement System
 *J. M. Wang, **S. L. Chang, **Y. C. Chung, and **S. W. Chen Deparmen of Informaion and Compuer Educaion *Naional Taiwan Universiy **Naional Taiwan Normal Universiy Taipei, Taiwan schen@csie.nnu.edu.w Absrac
*J. M. Wang, **S. L. Chang, **Y. C. Chung, and **S. W. Chen Deparmen of Informaion and Compuer Educaion *Naional Taiwan Universiy **Naional Taiwan Normal Universiy Taipei, Taiwan schen@csie.nnu.edu.w Absrac
Hidden Markov Model and Chapman Kolmogrov for Protein Structures Prediction from Images
 Hidden Markov Model and Chapman Kolmogrov for Proein Srucures Predicion from Images Md.Sarwar Kamal 1, Linkon Chowdhury 2, Mohammad Ibrahim Khan 2, Amira S. Ashour 3, João Manuel R.S. Tavares 4, Nilanjan
Hidden Markov Model and Chapman Kolmogrov for Proein Srucures Predicion from Images Md.Sarwar Kamal 1, Linkon Chowdhury 2, Mohammad Ibrahim Khan 2, Amira S. Ashour 3, João Manuel R.S. Tavares 4, Nilanjan
MOTION TRACKING is a fundamental capability that
 TECHNICAL REPORT CRES-05-008, CENTER FOR ROBOTICS AND EMBEDDED SYSTEMS, UNIVERSITY OF SOUTHERN CALIFORNIA 1 Real-ime Moion Tracking from a Mobile Robo Boyoon Jung, Suden Member, IEEE, Gaurav S. Sukhame,
TECHNICAL REPORT CRES-05-008, CENTER FOR ROBOTICS AND EMBEDDED SYSTEMS, UNIVERSITY OF SOUTHERN CALIFORNIA 1 Real-ime Moion Tracking from a Mobile Robo Boyoon Jung, Suden Member, IEEE, Gaurav S. Sukhame,
Gender Classification of Faces Using Adaboost*
 Gender Classificaion of Faces Using Adaboos* Rodrigo Verschae 1,2,3, Javier Ruiz-del-Solar 1,2, and Mauricio Correa 1,2 1 Deparmen of Elecrical Engineering, Universidad de Chile 2 Cener for Web Research,
Gender Classificaion of Faces Using Adaboos* Rodrigo Verschae 1,2,3, Javier Ruiz-del-Solar 1,2, and Mauricio Correa 1,2 1 Deparmen of Elecrical Engineering, Universidad de Chile 2 Cener for Web Research,
Hierarchical Recurrent Filtering for Fully Convolutional DenseNets
 Hierarchical Recurren Filering for Fully Convoluional DenseNes Jo rg Wagner1,2, Volker Fischer1, Michael Herman1 and Sven Behnke2 1- Bosch Cener for Arificial Inelligence - 71272 Renningen - Germany 2-
Hierarchical Recurren Filering for Fully Convoluional DenseNes Jo rg Wagner1,2, Volker Fischer1, Michael Herman1 and Sven Behnke2 1- Bosch Cener for Arificial Inelligence - 71272 Renningen - Germany 2-
IROS 2015 Workshop on On-line decision-making in multi-robot coordination (DEMUR 15)
") IROS 2015 Workshop on On-line decision-making in muli-robo coordinaion () OPTIMIZATION-BASED COOPERATIVE MULTI-ROBOT TARGET TRACKING WITH REASONING ABOUT OCCLUSIONS KAROL HAUSMAN a,, GREGORY KAHN b, SACHIN
IROS 2015 Workshop on On-line decision-making in muli-robo coordinaion () OPTIMIZATION-BASED COOPERATIVE MULTI-ROBOT TARGET TRACKING WITH REASONING ABOUT OCCLUSIONS KAROL HAUSMAN a,, GREGORY KAHN b, SACHIN
Parallel and Distributed Systems for Constructive Neural Network Learning*
 Parallel and Disribued Sysems for Consrucive Neural Nework Learning* J. Flecher Z. Obradovi School of Elecrical Engineering and Compuer Science Washingon Sae Universiy Pullman WA 99164-2752 Absrac A consrucive
Parallel and Disribued Sysems for Consrucive Neural Nework Learning* J. Flecher Z. Obradovi School of Elecrical Engineering and Compuer Science Washingon Sae Universiy Pullman WA 99164-2752 Absrac A consrucive
Robust 3D Visual Tracking Using Particle Filtering on the SE(3) Group
 Group") Robus 3D Visual Tracking Using Paricle Filering on he SE(3) Group Changhyun Choi and Henrik I. Chrisensen Roboics & Inelligen Machines, College of Compuing Georgia Insiue of Technology Alana, GA 3332,
Robus 3D Visual Tracking Using Paricle Filering on he SE(3) Group Changhyun Choi and Henrik I. Chrisensen Roboics & Inelligen Machines, College of Compuing Georgia Insiue of Technology Alana, GA 3332,
In Proceedings of CVPR '96. Structure and Motion of Curved 3D Objects from. using these methods [12].
![In Proceedings of CVPR '96. Structure and Motion of Curved 3D Objects from. using these methods [12].](/thumbs/94/119423762.jpg "In Proceedings of CVPR '96. Structure and Motion of Curved 3D Objects from. using these methods [12].") In Proceedings of CVPR '96 Srucure and Moion of Curved 3D Objecs from Monocular Silhouees B Vijayakumar David J Kriegman Dep of Elecrical Engineering Yale Universiy New Haven, CT 652-8267 Jean Ponce Compuer
In Proceedings of CVPR '96 Srucure and Moion of Curved 3D Objecs from Monocular Silhouees B Vijayakumar David J Kriegman Dep of Elecrical Engineering Yale Universiy New Haven, CT 652-8267 Jean Ponce Compuer
FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS
 AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS") FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS Mohammed A. Aseeri and M. I. Sobhy Deparmen of Elecronics, The Universiy of Ken a Canerbury Canerbury, Ken, CT2
FIELD PROGRAMMABLE GATE ARRAY (FPGA) AS A NEW APPROACH TO IMPLEMENT THE CHAOTIC GENERATORS Mohammed A. Aseeri and M. I. Sobhy Deparmen of Elecronics, The Universiy of Ken a Canerbury Canerbury, Ken, CT2
MATH Differential Equations September 15, 2008 Project 1, Fall 2008 Due: September 24, 2008
 MATH 5 - Differenial Equaions Sepember 15, 8 Projec 1, Fall 8 Due: Sepember 4, 8 Lab 1.3 - Logisics Populaion Models wih Harvesing For his projec we consider lab 1.3 of Differenial Equaions pages 146 o
MATH 5 - Differenial Equaions Sepember 15, 8 Projec 1, Fall 8 Due: Sepember 4, 8 Lab 1.3 - Logisics Populaion Models wih Harvesing For his projec we consider lab 1.3 of Differenial Equaions pages 146 o
Real time 3D face and facial feature tracking
 J Real-Time Image Proc (2007) 2:35 44 DOI 10.1007/s11554-007-0032-2 ORIGINAL RESEARCH PAPER Real ime 3D face and facial feaure racking Fadi Dornaika Æ Javier Orozco Received: 23 November 2006 / Acceped:
J Real-Time Image Proc (2007) 2:35 44 DOI 10.1007/s11554-007-0032-2 ORIGINAL RESEARCH PAPER Real ime 3D face and facial feaure racking Fadi Dornaika Æ Javier Orozco Received: 23 November 2006 / Acceped:
In fmri a Dual Echo Time EPI Pulse Sequence Can Induce Sources of Error in Dynamic Magnetic Field Maps
 In fmri a Dual Echo Time EPI Pulse Sequence Can Induce Sources of Error in Dynamic Magneic Field Maps A. D. Hahn 1, A. S. Nencka 1 and D. B. Rowe 2,1 1 Medical College of Wisconsin, Milwaukee, WI, Unied
In fmri a Dual Echo Time EPI Pulse Sequence Can Induce Sources of Error in Dynamic Magneic Field Maps A. D. Hahn 1, A. S. Nencka 1 and D. B. Rowe 2,1 1 Medical College of Wisconsin, Milwaukee, WI, Unied
A Framework for Applying Point Clouds Grabbed by Multi-Beam LIDAR in Perceiving the Driving Environment
 Sensors 215, 15, 21931-21956; doi:1.339/s15921931 Aricle OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors A Framewor for Applying Poin Clouds Grabbed by Muli-Beam LIDAR in Perceiving he Driving
Sensors 215, 15, 21931-21956; doi:1.339/s15921931 Aricle OPEN ACCESS sensors ISSN 1424-822 www.mdpi.com/journal/sensors A Framewor for Applying Poin Clouds Grabbed by Muli-Beam LIDAR in Perceiving he Driving