Invariant Measures. The Smooth Approach
|
|
|
- Silvia Joella Stafford
- 5 years ago
- Views:
Transcription
1 Invariant Measures Mathieu Desbrun & Peter Schröder 1 The Smooth Approach On this show lots of derivatives tedious expressions in coordinates For what? only to discover that there are invariant measures we can do better! In fact This is our whole goal 2
2 What Will We Measure? Convex sets in n-space an object living in n-dim space convex, compact subset of e.g., points, edges, faces 3 What Will We Measure? Convex sets in n-space an object living in n-dim space convex, compact subset of + finite unions and intersections e.g., points, edges, faces or entire mesh 4
 additivity makes sense 5 Geometric Measures More axioms (3) Euclidean motion invariant (4)")
3 Starting from Scratch Want to measure things what is a measure? R n convex, compact sets finite unions and intersections provided this expression axioms: (2) additivity makes sense 5 Geometric Measures More axioms (3) Euclidean motion invariant (4) normalization (parallelotope) example: volume Don t want dependence on coordinate origin or orientation Are there others? How do we extend them? 6
4 Other Measures Elementary symmetric functions area/2 length/4 7 Invariant Measures Intrinsic volumes n measures in n dimensions how to generalize to compact, convex sets? Geometric probability ex: measure points in set probability of hitting set! Volume, area, mean width?! 8
5 Geometric Probability Blindly throw darts & count number of hits Darts: k-dim subspaces of n-d points lines planes volumes k=0 n=2 9 Geometric Probability Indicator function, input: a dart output (point dart): 1 if dart hits body 0 if dart misses body k=0 n=
6 Geometric Probability Indicator function, input: a dart output (point dart): 1 if dart hits body 0 0 if dart misses body 0 1 in general, 1 k=1 output is k=0 1 n=2 0 # of hits n= Geometric Probability Throw N random darts to estimate volume R C k=0 n=2 12


7 Geometric Probability Throw N random darts to estimate volume Throw all the darts you have 13 Geometric Probability Throw N random darts to estimate volume 14
8 Grassmannian k-dim subspaces of n-d not nec y through origin example: lines in R 3 disjoint union of planar regions measure of lines through rectangle 15 Grassmannian k-dim subspaces of n-d not nec y through origin example: lines in R 3 measure of lines through rectangle number of times meets D 16

9 Grassmannian k-dim subspaces of n-d not nec y through origin example: lines in R 3 measure of lines through rectangle limit it process gives surface area 17 Example: Lines in R 3 Measure of lines thru planar surface limit process gives surface area for arbitrary planar surface 18
10 Example: Lines in R 3 Measure of lines through planar surface limit process gives surface area for arbitrary planar surface 19 Example: Lines in R 3 Measure of lines through planar surface limit process gives surface area for arbitrary planar surface 20
11 Example: Lines in R 3 Area of (non-planar disjoint) surface D partition into planar regions, C i disjoint union 21 Example: Lines in R 3 Area of (non-planar disjoint) surface D surface D partition into planar regions, C i add areas of each region number of times meets D 22
12 Example: Lines in R 3 Area of (non-planar, disjoint) surface D partition into planar regions, C i add areas of each region number of times meets D 23 Example: Planes in R 3 Measure planes along a curve: simplest curve: line segment proportional to length 24
13 Example: Planes in R 3 Measure planes along a curve: simplest curve: line segment proportional to length 25 Example: planes in R 3 Measure planes along a curve: consider polyline proportional to length 26
 for compact convex set is the Grassmannian")
14 Mean Width Measure of planes along line for a curve just the length back to the parallelotope planes u mt. P iff mt. c now average over u generally: 27 Recap Axioms it is a measure Euclidian motion invariance additivity some normalization k (C) for compact convex set is the Grassmannian measure of all linear varieties of dim. n-k meeting C 28
15 But wait Do we have all of them? there is one missing symmetric function of order zero extend to all convex sets indicator function Check that this is indeed a measure limit from the right 29 Going to Higher-D Peel off dimension at a time restriction to hyperplane for finite connected(!) union of convex compact sets Euler characteristic! 30
 union of convex compact sets Euler characteristic!")
16 Going to Higher-D Peel off dimension at a time restriction to hyperplane for finite connected(!) union of convex compact sets Euler characteristic! 31 Euler Character For a polyhedron assume simplicial complex All others follow 32
17 Continuity Our final axiom measure should be continuous Hadwiger (1957) these measures form a basis for all continuous additive rigid id motion invariant measures on ring of convex sets 33 Putting it Together Through inflated convex regions convex sets in R n min distance to set 34

18 Example in 2D Inflate a planar polygon by epsilon what is the new area? 35 Example in 2D Inflate a planar polygon by epsilon what is the new area? what is the new area? 36






19 Example in 2D Inflate a planar polygon by epsilon what is the new area? 37 Example in 3D Inflate a polyhedron this time 38


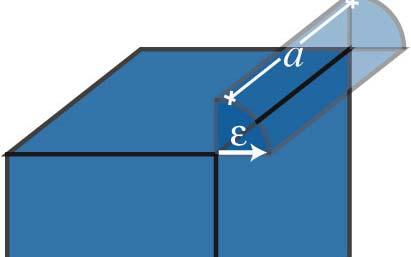

20 Example in 3D Inflate a polyhedron this time 39 Example in 3D Inflate a polyhedron this time 40




21 Example in 3D Inflate a polyhedron this time 41 Putting it Together Steiner, Cauchy, Hadwiger convex sets in R n min distance to set Quermaßintegrale Intrinsic Volumes unit ball 42
22 Steiner Example in R 3 if K is C 2 normalized elementary symmetric functions in principal curvatures 43 Proof Steiner by induction and with use of the Cauchy formula Smooth case tedious but elementary calculation 44
23 How to Use? Want to measure deformation? only very few measures need apply volume, area, mean width, Define curvatures of polyhedra? deal with convexity issue Normal cycle Cohen-Steiner/Morvan 45
Invariant Measures of Convex Sets. Eitan Grinspun, Columbia University Peter Schröder, Caltech
 Invariant Measures of Convex Sets Eitan Grinspun, Columbia University Peter Schröder, Caltech What will we measure? Subject to be measured, S an object living in n-dim space convex, compact subset of R
Invariant Measures of Convex Sets Eitan Grinspun, Columbia University Peter Schröder, Caltech What will we measure? Subject to be measured, S an object living in n-dim space convex, compact subset of R
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Week 7 Convex Hulls in 3D
 1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
1 Week 7 Convex Hulls in 3D 2 Polyhedra A polyhedron is the natural generalization of a 2D polygon to 3D 3 Closed Polyhedral Surface A closed polyhedral surface is a finite set of interior disjoint polygons
Introduction to geometry
 1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance.
 Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Surfaces: notes on Geometry & Topology
 Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Euler s Theorem. Brett Chenoweth. February 26, 2013
 Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Euler s Theorem Brett Chenoweth February 26, 2013 1 Introduction This summer I have spent six weeks of my holidays working on a research project funded by the AMSI. The title of my project was Euler s
Solid Modelling. Graphics Systems / Computer Graphics and Interfaces COLLEGE OF ENGINEERING UNIVERSITY OF PORTO
 Solid Modelling Graphics Systems / Computer Graphics and Interfaces 1 Solid Modelling In 2D, one set 2D line segments or curves does not necessarily form a closed area. In 3D, a collection of surfaces
Solid Modelling Graphics Systems / Computer Graphics and Interfaces 1 Solid Modelling In 2D, one set 2D line segments or curves does not necessarily form a closed area. In 3D, a collection of surfaces
Geometric Modeling Mortenson Chapter 11. Complex Model Construction
 Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Geometric Modeling 91.580.201 Mortenson Chapter 11 Complex Model Construction Topics Topology of Models Connectivity and other intrinsic properties Graph-Based Models Emphasize topological structure Boolean
Geometric structures on 2-orbifolds
 Geometric structures on 2-orbifolds Section 1: Manifolds and differentiable structures S. Choi Department of Mathematical Science KAIST, Daejeon, South Korea 2010 Fall, Lectures at KAIST S. Choi (KAIST)
Geometric structures on 2-orbifolds Section 1: Manifolds and differentiable structures S. Choi Department of Mathematical Science KAIST, Daejeon, South Korea 2010 Fall, Lectures at KAIST S. Choi (KAIST)
Euler Characteristic
 Euler Characteristic Beifang Chen September 2, 2015 1 Euler Number There are two rules to follow when one counts the number of objects of finite sets. Given two finite sets A, B, we have (1) Addition Principle
Euler Characteristic Beifang Chen September 2, 2015 1 Euler Number There are two rules to follow when one counts the number of objects of finite sets. Given two finite sets A, B, we have (1) Addition Principle
Chapter 4 Concepts from Geometry
 Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Chapter 4 Concepts from Geometry An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Line Segments The line segment between two points and in R n is the set of points on the straight line joining
Contents. Preface... VII. Part I Classical Topics Revisited
 Contents Preface........................................................ VII Part I Classical Topics Revisited 1 Sphere Packings........................................... 3 1.1 Kissing Numbers of Spheres..............................
Contents Preface........................................................ VII Part I Classical Topics Revisited 1 Sphere Packings........................................... 3 1.1 Kissing Numbers of Spheres..............................
MATH 890 HOMEWORK 2 DAVID MEREDITH
 MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
MATH 890 HOMEWORK 2 DAVID MEREDITH (1) Suppose P and Q are polyhedra. Then P Q is a polyhedron. Moreover if P and Q are polytopes then P Q is a polytope. The facets of P Q are either F Q where F is a facet
However, this is not always true! For example, this fails if both A and B are closed and unbounded (find an example).
.") 98 CHAPTER 3. PROPERTIES OF CONVEX SETS: A GLIMPSE 3.2 Separation Theorems It seems intuitively rather obvious that if A and B are two nonempty disjoint convex sets in A 2, then there is a line, H, separating
98 CHAPTER 3. PROPERTIES OF CONVEX SETS: A GLIMPSE 3.2 Separation Theorems It seems intuitively rather obvious that if A and B are two nonempty disjoint convex sets in A 2, then there is a line, H, separating
Euler Characteristic
 Euler Characteristic Rebecca Robinson May 15, 2007 Euler Characteristic Rebecca Robinson 1 PLANAR GRAPHS 1 Planar graphs v = 5, e = 4, f = 1 v e + f = 2 v = 6, e = 7, f = 3 v = 4, e = 6, f = 4 v e + f
Euler Characteristic Rebecca Robinson May 15, 2007 Euler Characteristic Rebecca Robinson 1 PLANAR GRAPHS 1 Planar graphs v = 5, e = 4, f = 1 v e + f = 2 v = 6, e = 7, f = 3 v = 4, e = 6, f = 4 v e + f
1 Appendix to notes 2, on Hyperbolic geometry:
 1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary?
 Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary? Is the converse true? What happens in the classical special case?
Don t just read it; fight it! Ask your own questions, look for your own examples, discover your own proofs. Is the hypothesis necessary? Is the converse true? What happens in the classical special case?
Planar Graphs. 1 Graphs and maps. 1.1 Planarity and duality
 Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Planar Graphs In the first half of this book, we consider mostly planar graphs and their geometric representations, mostly in the plane. We start with a survey of basic results on planar graphs. This chapter
Basics of Combinatorial Topology
 Chapter 7 Basics of Combinatorial Topology 7.1 Simplicial and Polyhedral Complexes In order to study and manipulate complex shapes it is convenient to discretize these shapes and to view them as the union
Chapter 7 Basics of Combinatorial Topology 7.1 Simplicial and Polyhedral Complexes In order to study and manipulate complex shapes it is convenient to discretize these shapes and to view them as the union
Edge unfolding Cut sets Source foldouts Proof and algorithm Complexity issues Aleksandrov unfolding? Unfolding polyhedra.
 Unfolding polyhedra Ezra Miller University of Minnesota ezra@math.umn.edu University of Nebraska 27 April 2007 Outline 1. Edge unfolding 2. Cut sets 3. Source foldouts 4. Proof and algorithm 5. Complexity
Unfolding polyhedra Ezra Miller University of Minnesota ezra@math.umn.edu University of Nebraska 27 April 2007 Outline 1. Edge unfolding 2. Cut sets 3. Source foldouts 4. Proof and algorithm 5. Complexity
Geometry Processing TexPoint fonts used in EMF. Read the TexPoint manual before you delete this box.: AAAAA
 Geometry Processing What is Geometry Processing? Understanding the math of 3D shape What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape What is Geometry
Geometry Processing What is Geometry Processing? Understanding the math of 3D shape What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape What is Geometry
1 Euler characteristics
 Tutorials: MA342: Tutorial Problems 2014-15 Tuesday, 1-2pm, Venue = AC214 Wednesday, 2-3pm, Venue = AC201 Tutor: Adib Makroon 1 Euler characteristics 1. Draw a graph on a sphere S 2 PROBLEMS in such a
Tutorials: MA342: Tutorial Problems 2014-15 Tuesday, 1-2pm, Venue = AC214 Wednesday, 2-3pm, Venue = AC201 Tutor: Adib Makroon 1 Euler characteristics 1. Draw a graph on a sphere S 2 PROBLEMS in such a
Finitely additive measures on o-minimal sets
 University of Massachusetts tibor beke@uml.edu July 27, 2009 locally examples Hadwiger s formula to do locally set-up work topologically (over R, the real reals) could also take real-closed base field
University of Massachusetts tibor beke@uml.edu July 27, 2009 locally examples Hadwiger s formula to do locally set-up work topologically (over R, the real reals) could also take real-closed base field
Some Open Problems in Graph Theory and Computational Geometry
 Some Open Problems in Graph Theory and Computational Geometry David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science ICS 269, January 25, 2002 Two Models of Algorithms Research
Some Open Problems in Graph Theory and Computational Geometry David Eppstein Univ. of California, Irvine Dept. of Information and Computer Science ICS 269, January 25, 2002 Two Models of Algorithms Research
66 III Complexes. R p (r) }.
 }.") 66 III Complexes III.4 Alpha Complexes In this section, we use a radius constraint to introduce a family of subcomplexes of the Delaunay complex. These complexes are similar to the Čech complexes but differ
66 III Complexes III.4 Alpha Complexes In this section, we use a radius constraint to introduce a family of subcomplexes of the Delaunay complex. These complexes are similar to the Čech complexes but differ
Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions
 Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a
Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a
1. CONVEX POLYGONS. Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D.
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
CS 2336 Discrete Mathematics
 CS 2336 Discrete Mathematics Lecture 15 Graphs: Planar Graphs 1 Outline What is a Planar Graph? Euler Planar Formula Platonic Solids Five Color Theorem Kuratowski s Theorem 2 What is a Planar Graph? Definition
CS 2336 Discrete Mathematics Lecture 15 Graphs: Planar Graphs 1 Outline What is a Planar Graph? Euler Planar Formula Platonic Solids Five Color Theorem Kuratowski s Theorem 2 What is a Planar Graph? Definition
(a) (b) (c) (d) (e) (f) Figure 3.1: What is a polygon?
 (b) (c) (d) (e) (f) Figure 3.1: What is a polygon?") Chapter 3 Polygons Although we can think of a line l R 2 as an infinite point set that consists of all points in R 2 that are on l, there still exists a finite description for l. Such a description is,
Chapter 3 Polygons Although we can think of a line l R 2 as an infinite point set that consists of all points in R 2 that are on l, there still exists a finite description for l. Such a description is,
Restricted-Orientation Convexity in Higher-Dimensional Spaces
 Restricted-Orientation Convexity in Higher-Dimensional Spaces ABSTRACT Eugene Fink Derick Wood University of Waterloo, Waterloo, Ont, Canada N2L3G1 {efink, dwood}@violetwaterlooedu A restricted-oriented
Restricted-Orientation Convexity in Higher-Dimensional Spaces ABSTRACT Eugene Fink Derick Wood University of Waterloo, Waterloo, Ont, Canada N2L3G1 {efink, dwood}@violetwaterlooedu A restricted-oriented
INTRODUCTION TO THE HOMOLOGY GROUPS OF COMPLEXES
 INTRODUCTION TO THE HOMOLOGY GROUPS OF COMPLEXES RACHEL CARANDANG Abstract. This paper provides an overview of the homology groups of a 2- dimensional complex. It then demonstrates a proof of the Invariance
INTRODUCTION TO THE HOMOLOGY GROUPS OF COMPLEXES RACHEL CARANDANG Abstract. This paper provides an overview of the homology groups of a 2- dimensional complex. It then demonstrates a proof of the Invariance
Final Exam, F11PE Solutions, Topology, Autumn 2011
 Final Exam, F11PE Solutions, Topology, Autumn 2011 Question 1 (i) Given a metric space (X, d), define what it means for a set to be open in the associated metric topology. Solution: A set U X is open if,
Final Exam, F11PE Solutions, Topology, Autumn 2011 Question 1 (i) Given a metric space (X, d), define what it means for a set to be open in the associated metric topology. Solution: A set U X is open if,
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces
 MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
MA 323 Geometric Modelling Course Notes: Day 36 Subdivision Surfaces David L. Finn Today, we continue our discussion of subdivision surfaces, by first looking in more detail at the midpoint method and
Wait-Free Computability for General Tasks
 Wait-Free Computability for General Tasks Companion slides for Distributed Computing Through Combinatorial Topology Maurice Herlihy & Dmitry Kozlov & Sergio Rajsbaum 1 Road Map Inherently colored tasks
Wait-Free Computability for General Tasks Companion slides for Distributed Computing Through Combinatorial Topology Maurice Herlihy & Dmitry Kozlov & Sergio Rajsbaum 1 Road Map Inherently colored tasks
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
What is Set? Set Theory. Notation. Venn Diagram
 What is Set? Set Theory Peter Lo Set is any well-defined list, collection, or class of objects. The objects in set can be anything These objects are called the Elements or Members of the set. CS218 Peter
What is Set? Set Theory Peter Lo Set is any well-defined list, collection, or class of objects. The objects in set can be anything These objects are called the Elements or Members of the set. CS218 Peter
Convex Sets. CSCI5254: Convex Optimization & Its Applications. subspaces, affine sets, and convex sets. operations that preserve convexity
 CSCI5254: Convex Optimization & Its Applications Convex Sets subspaces, affine sets, and convex sets operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
CSCI5254: Convex Optimization & Its Applications Convex Sets subspaces, affine sets, and convex sets operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
Planarity. 1 Introduction. 2 Topological Results
 Planarity 1 Introduction A notion of drawing a graph in the plane has led to some of the most deep results in graph theory. Vaguely speaking by a drawing or embedding of a graph G in the plane we mean
Planarity 1 Introduction A notion of drawing a graph in the plane has led to some of the most deep results in graph theory. Vaguely speaking by a drawing or embedding of a graph G in the plane we mean
Lecture-12: Closed Sets
 and Its Examples Properties of Lecture-12: Dr. Department of Mathematics Lovely Professional University Punjab, India October 18, 2014 Outline Introduction and Its Examples Properties of 1 Introduction
and Its Examples Properties of Lecture-12: Dr. Department of Mathematics Lovely Professional University Punjab, India October 18, 2014 Outline Introduction and Its Examples Properties of 1 Introduction
COMP331/557. Chapter 2: The Geometry of Linear Programming. (Bertsimas & Tsitsiklis, Chapter 2)
") COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
COMP331/557 Chapter 2: The Geometry of Linear Programming (Bertsimas & Tsitsiklis, Chapter 2) 49 Polyhedra and Polytopes Definition 2.1. Let A 2 R m n and b 2 R m. a set {x 2 R n A x b} is called polyhedron
Convex Hulls (3D) O Rourke, Chapter 4
 O Rourke, Chapter 4") Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Convex Hulls (3D) O Rourke, Chapter 4 Outline Polyhedra Polytopes Euler Characteristic (Oriented) Mesh Representation Polyhedra Definition: A polyhedron is a solid region in 3D space whose boundary is
Convexity: an introduction
 Convexity: an introduction Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 74 1. Introduction 1. Introduction what is convexity where does it arise main concepts and
Convexity: an introduction Geir Dahl CMA, Dept. of Mathematics and Dept. of Informatics University of Oslo 1 / 74 1. Introduction 1. Introduction what is convexity where does it arise main concepts and
Simplicial Complexes: Second Lecture
 Simplicial Complexes: Second Lecture 4 Nov, 2010 1 Overview Today we have two main goals: Prove that every continuous map between triangulable spaces can be approximated by a simplicial map. To do this,
Simplicial Complexes: Second Lecture 4 Nov, 2010 1 Overview Today we have two main goals: Prove that every continuous map between triangulable spaces can be approximated by a simplicial map. To do this,
Convex sets and convex functions
 Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Collision Detection. Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering
 RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
RBE 550 MOTION PLANNING BASED ON DR. DMITRY BERENSON S RBE 550 Collision Detection Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Euler Angle RBE
Lectures on topology. S. K. Lando
 Lectures on topology S. K. Lando Contents 1 Reminder 2 1.1 Topological spaces and continuous mappings.......... 3 1.2 Examples............................. 4 1.3 Properties of topological spaces.................
Lectures on topology S. K. Lando Contents 1 Reminder 2 1.1 Topological spaces and continuous mappings.......... 3 1.2 Examples............................. 4 1.3 Properties of topological spaces.................
Given four lines in space, how many lines meet all four?: The geometry, topology, and combinatorics of the Grassmannian
 Atlanta January 5, 2005 Given four lines in space, how many lines meet all four?: The geometry, topology, and combinatorics of the Grassmannian Ravi Vakil, Stanford University http://math.stanford.edu/
Atlanta January 5, 2005 Given four lines in space, how many lines meet all four?: The geometry, topology, and combinatorics of the Grassmannian Ravi Vakil, Stanford University http://math.stanford.edu/
Algebraic Geometry of Segmentation and Tracking
 Ma191b Winter 2017 Geometry of Neuroscience Geometry of lines in 3-space and Segmentation and Tracking This lecture is based on the papers: Reference: Marco Pellegrini, Ray shooting and lines in space.
Ma191b Winter 2017 Geometry of Neuroscience Geometry of lines in 3-space and Segmentation and Tracking This lecture is based on the papers: Reference: Marco Pellegrini, Ray shooting and lines in space.
Topology - I. Michael Shulman WOMP 2004
 Topology - I Michael Shulman WOMP 2004 1 Topological Spaces There are many different ways to define a topological space; the most common one is as follows: Definition 1.1 A topological space (often just
Topology - I Michael Shulman WOMP 2004 1 Topological Spaces There are many different ways to define a topological space; the most common one is as follows: Definition 1.1 A topological space (often just
Matching and Planarity
 Matching and Planarity Po-Shen Loh June 010 1 Warm-up 1. (Bondy 1.5.9.) There are n points in the plane such that every pair of points has distance 1. Show that there are at most n (unordered) pairs of
Matching and Planarity Po-Shen Loh June 010 1 Warm-up 1. (Bondy 1.5.9.) There are n points in the plane such that every pair of points has distance 1. Show that there are at most n (unordered) pairs of
Question. Why is the third shape not convex?
 1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
1. CONVEX POLYGONS Definition. A shape D in the plane is convex if every line drawn between two points in D is entirely inside D. Convex 6 gon Another convex 6 gon Not convex Question. Why is the third
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Figure 2.1: An example of a convex set and a nonconvex one.
 Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Convex Hulls 2.1 Definitions 2 Convexity is the key to understanding and simplifying geometry, and the convex hull plays a role in geometry akin to the sorted order for a collection of numbers. So what
Discrete Differential Geometry: An Applied Introduction
 Discrete Differential Geometry: An Applied Introduction Eitan Grinspun with Mathieu Desbrun, Konrad Polthier, Peter Schröder, & Ari Stern 1 Differential Geometry Why do we care? geometry of surfaces Springborn
Discrete Differential Geometry: An Applied Introduction Eitan Grinspun with Mathieu Desbrun, Konrad Polthier, Peter Schröder, & Ari Stern 1 Differential Geometry Why do we care? geometry of surfaces Springborn
What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape
 Geometry Processing What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape What is Geometry Processing? Understanding the math of 3D shape and applying
Geometry Processing What is Geometry Processing? Understanding the math of 3D shape and applying that math to discrete shape What is Geometry Processing? Understanding the math of 3D shape and applying
DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU /858B Fall 2017
 DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B Fall 2017 LECTURE 10: DISCRETE CURVATURE DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B
DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B Fall 2017 LECTURE 10: DISCRETE CURVATURE DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B
Polytopes Course Notes
 Polytopes Course Notes Carl W. Lee Department of Mathematics University of Kentucky Lexington, KY 40506 lee@ms.uky.edu Fall 2013 i Contents 1 Polytopes 1 1.1 Convex Combinations and V-Polytopes.....................
Polytopes Course Notes Carl W. Lee Department of Mathematics University of Kentucky Lexington, KY 40506 lee@ms.uky.edu Fall 2013 i Contents 1 Polytopes 1 1.1 Convex Combinations and V-Polytopes.....................
CLASSIFICATION OF ORDERABLE AND DEFORMABLE COMPACT COXETER POLYHEDRA IN HYPERBOLIC SPACE
 CLASSIFICATION OF ORDERABLE AND DEFORMABLE COMPACT COXETER POLYHEDRA IN HYPERBOLIC SPACE DHRUBAJIT CHOUDHURY, SUHYOUNG CHOI, AND GYE-SEON LEE Abstract. The aim of this work is to investigate properties
CLASSIFICATION OF ORDERABLE AND DEFORMABLE COMPACT COXETER POLYHEDRA IN HYPERBOLIC SPACE DHRUBAJIT CHOUDHURY, SUHYOUNG CHOI, AND GYE-SEON LEE Abstract. The aim of this work is to investigate properties
Part IV. 2D Clipping
 Part IV 2D Clipping The Liang-Barsky algorithm Boolean operations on polygons Outline The Liang-Barsky algorithm Boolean operations on polygons Clipping The goal of clipping is mainly to eliminate parts
Part IV 2D Clipping The Liang-Barsky algorithm Boolean operations on polygons Outline The Liang-Barsky algorithm Boolean operations on polygons Clipping The goal of clipping is mainly to eliminate parts
Lecture 1 Discrete Geometric Structures
 Lecture 1 Discrete Geometric Structures Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology
Lecture 1 Discrete Geometric Structures Jean-Daniel Boissonnat Winter School on Computational Geometry and Topology University of Nice Sophia Antipolis January 23-27, 2017 Computational Geometry and Topology
Multi-tiling and equidecomposability of polytopes by lattice translates
 Multi-tiling and equidecomposability of polytopes by lattice translates Bochen Liu Bar-Ilan University, Israel Joint work with Nir Lev 1 / 19 Multi-tiling Let A R d be a polytope and denote χ A as its
Multi-tiling and equidecomposability of polytopes by lattice translates Bochen Liu Bar-Ilan University, Israel Joint work with Nir Lev 1 / 19 Multi-tiling Let A R d be a polytope and denote χ A as its
ACTUALLY DOING IT : an Introduction to Polyhedral Computation
 ACTUALLY DOING IT : an Introduction to Polyhedral Computation Jesús A. De Loera Department of Mathematics Univ. of California, Davis http://www.math.ucdavis.edu/ deloera/ 1 What is a Convex Polytope? 2
ACTUALLY DOING IT : an Introduction to Polyhedral Computation Jesús A. De Loera Department of Mathematics Univ. of California, Davis http://www.math.ucdavis.edu/ deloera/ 1 What is a Convex Polytope? 2
Lecture 5: Simplicial Complex
 Lecture 5: Simplicial Complex 2-Manifolds, Simplex and Simplicial Complex Scribed by: Lei Wang First part of this lecture finishes 2-Manifolds. Rest part of this lecture talks about simplicial complex.
Lecture 5: Simplicial Complex 2-Manifolds, Simplex and Simplicial Complex Scribed by: Lei Wang First part of this lecture finishes 2-Manifolds. Rest part of this lecture talks about simplicial complex.
Lecture 3: Convex sets
 Lecture 3: Convex sets Rajat Mittal IIT Kanpur We denote the set of real numbers as R. Most of the time we will be working with space R n and its elements will be called vectors. Remember that a subspace
Lecture 3: Convex sets Rajat Mittal IIT Kanpur We denote the set of real numbers as R. Most of the time we will be working with space R n and its elements will be called vectors. Remember that a subspace
References. Additional lecture notes for 2/18/02.
 References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
References Additional lecture notes for 2/18/02. I-COLLIDE: Interactive and Exact Collision Detection for Large-Scale Environments, by Cohen, Lin, Manocha & Ponamgi, Proc. of ACM Symposium on Interactive
TOPOLOGY, DR. BLOCK, FALL 2015, NOTES, PART 3.
 TOPOLOGY, DR. BLOCK, FALL 2015, NOTES, PART 3. 301. Definition. Let m be a positive integer, and let X be a set. An m-tuple of elements of X is a function x : {1,..., m} X. We sometimes use x i instead
TOPOLOGY, DR. BLOCK, FALL 2015, NOTES, PART 3. 301. Definition. Let m be a positive integer, and let X be a set. An m-tuple of elements of X is a function x : {1,..., m} X. We sometimes use x i instead
Convex sets and convex functions
 Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Convex sets and convex functions Convex optimization problems Convex sets and their examples Separating and supporting hyperplanes Projections on convex sets Convex functions, conjugate functions ECE 602,
Curvature Berkeley Math Circle January 08, 2013
 Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Curvature Berkeley Math Circle January 08, 2013 Linda Green linda@marinmathcircle.org Parts of this handout are taken from Geometry and the Imagination by John Conway, Peter Doyle, Jane Gilman, and Bill
Math 311. Polyhedra Name: A Candel CSUN Math
 1. A polygon may be described as a finite region of the plane enclosed by a finite number of segments, arranged in such a way that (a) exactly two segments meets at every vertex, and (b) it is possible
1. A polygon may be described as a finite region of the plane enclosed by a finite number of segments, arranged in such a way that (a) exactly two segments meets at every vertex, and (b) it is possible
Geometric structures on manifolds
 CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
CHAPTER 3 Geometric structures on manifolds In this chapter, we give our first examples of hyperbolic manifolds, combining ideas from the previous two chapters. 3.1. Geometric structures 3.1.1. Introductory
TWO CONTRIBUTIONS OF EULER
 TWO CONTRIBUTIONS OF EULER SIEMION FAJTLOWICZ. MATH 4315 Eulerian Tours. Although some mathematical problems which now can be thought of as graph-theoretical, go back to the times of Euclid, the invention
TWO CONTRIBUTIONS OF EULER SIEMION FAJTLOWICZ. MATH 4315 Eulerian Tours. Although some mathematical problems which now can be thought of as graph-theoretical, go back to the times of Euclid, the invention
2. Convex sets. x 1. x 2. affine set: contains the line through any two distinct points in the set
 2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
2. Convex sets Convex Optimization Boyd & Vandenberghe affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes dual
Example: The following is an example of a polyhedron. Fill the blanks with the appropriate answer. Vertices:
 11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
Jordan Curves. A curve is a subset of IR 2 of the form
 Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0,1]}, where γ : [0,1] IR 2 is a continuous mapping from the closed interval [0,1] to the plane. γ(0) and γ(1) are called the endpoints
Jordan Curves A curve is a subset of IR 2 of the form α = {γ(x) : x [0,1]}, where γ : [0,1] IR 2 is a continuous mapping from the closed interval [0,1] to the plane. γ(0) and γ(1) are called the endpoints
Convex Optimization - Chapter 1-2. Xiangru Lian August 28, 2015
 Convex Optimization - Chapter 1-2 Xiangru Lian August 28, 2015 1 Mathematical optimization minimize f 0 (x) s.t. f j (x) 0, j=1,,m, (1) x S x. (x 1,,x n ). optimization variable. f 0. R n R. objective
Convex Optimization - Chapter 1-2 Xiangru Lian August 28, 2015 1 Mathematical optimization minimize f 0 (x) s.t. f j (x) 0, j=1,,m, (1) x S x. (x 1,,x n ). optimization variable. f 0. R n R. objective
Convex Optimization. Convex Sets. ENSAE: Optimisation 1/24
 Convex Optimization Convex Sets ENSAE: Optimisation 1/24 Today affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes
Convex Optimization Convex Sets ENSAE: Optimisation 1/24 Today affine and convex sets some important examples operations that preserve convexity generalized inequalities separating and supporting hyperplanes
Discrete Exterior Calculus How to Turn Your Mesh into a Computational Structure. Discrete Differential Geometry
 Discrete Exterior Calculus How to Turn Your Mesh into a Computational Structure Discrete Differential Geometry Big Picture Deriving a whole Discrete Calculus you need first a discrete domain will induce
Discrete Exterior Calculus How to Turn Your Mesh into a Computational Structure Discrete Differential Geometry Big Picture Deriving a whole Discrete Calculus you need first a discrete domain will induce
CS675: Convex and Combinatorial Optimization Spring 2018 Convex Sets. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Spring 2018 Convex Sets Instructor: Shaddin Dughmi Outline 1 Convex sets, Affine sets, and Cones 2 Examples of Convex Sets 3 Convexity-Preserving Operations
CS675: Convex and Combinatorial Optimization Spring 2018 Convex Sets Instructor: Shaddin Dughmi Outline 1 Convex sets, Affine sets, and Cones 2 Examples of Convex Sets 3 Convexity-Preserving Operations
Linear Complexity Hexahedral Mesh Generation
 Linear Complexity Hexahedral Mesh Generation David Eppstein Department of Information and Computer Science University of California, Irvine, CA 92717 http://www.ics.uci.edu/ eppstein/ Tech. Report 95-51
Linear Complexity Hexahedral Mesh Generation David Eppstein Department of Information and Computer Science University of California, Irvine, CA 92717 http://www.ics.uci.edu/ eppstein/ Tech. Report 95-51
GEOMETRY OF SURFACES. b3 course Nigel Hitchin
 GEOMETRY OF SURFACES b3 course 2004 Nigel Hitchin hitchin@maths.ox.ac.uk 1 1 Introduction This is a course on surfaces. Your mental image of a surface should be something like this: or this However we
GEOMETRY OF SURFACES b3 course 2004 Nigel Hitchin hitchin@maths.ox.ac.uk 1 1 Introduction This is a course on surfaces. Your mental image of a surface should be something like this: or this However we
T. Background material: Topology
 MATH41071/MATH61071 Algebraic topology Autumn Semester 2017 2018 T. Background material: Topology For convenience this is an overview of basic topological ideas which will be used in the course. This material
MATH41071/MATH61071 Algebraic topology Autumn Semester 2017 2018 T. Background material: Topology For convenience this is an overview of basic topological ideas which will be used in the course. This material
Lecture 15: The subspace topology, Closed sets
 Lecture 15: The subspace topology, Closed sets 1 The Subspace Topology Definition 1.1. Let (X, T) be a topological space with topology T. subset of X, the collection If Y is a T Y = {Y U U T} is a topology
Lecture 15: The subspace topology, Closed sets 1 The Subspace Topology Definition 1.1. Let (X, T) be a topological space with topology T. subset of X, the collection If Y is a T Y = {Y U U T} is a topology
Dirichlet Voronoi Diagrams and Delaunay Triangulations
 Chapter 9 Dirichlet Voronoi Diagrams and Delaunay Triangulations 9.1 Dirichlet Voronoi Diagrams In this chapter we present very briefly the concepts of a Voronoi diagram and of a Delaunay triangulation.
Chapter 9 Dirichlet Voronoi Diagrams and Delaunay Triangulations 9.1 Dirichlet Voronoi Diagrams In this chapter we present very briefly the concepts of a Voronoi diagram and of a Delaunay triangulation.
9.5 Equivalence Relations
 9.5 Equivalence Relations You know from your early study of fractions that each fraction has many equivalent forms. For example, 2, 2 4, 3 6, 2, 3 6, 5 30,... are all different ways to represent the same
9.5 Equivalence Relations You know from your early study of fractions that each fraction has many equivalent forms. For example, 2, 2 4, 3 6, 2, 3 6, 5 30,... are all different ways to represent the same
The clique number of a random graph in (,1 2) Let ( ) # -subgraphs in = 2 =: ( ) We will be interested in s.t. ( )~1. To gain some intuition note ( )
 Let ( ) # -subgraphs in = 2 =: ( ) We will be interested in s.t. ( )~1. To gain some intuition note ( )") The clique number of a random graph in (,1 2) Let () # -subgraphs in = 2 =:() We will be interested in s.t. ()~1. To gain some intuition note ()~ 2 =2 and so ~2log. Now let us work rigorously. () (+1)
The clique number of a random graph in (,1 2) Let () # -subgraphs in = 2 =:() We will be interested in s.t. ()~1. To gain some intuition note ()~ 2 =2 and so ~2log. Now let us work rigorously. () (+1)
Lecture notes for Topology MMA100
 Lecture notes for Topology MMA100 J A S, S-11 1 Simplicial Complexes 1.1 Affine independence A collection of points v 0, v 1,..., v n in some Euclidean space R N are affinely independent if the (affine
Lecture notes for Topology MMA100 J A S, S-11 1 Simplicial Complexes 1.1 Affine independence A collection of points v 0, v 1,..., v n in some Euclidean space R N are affinely independent if the (affine
Overview. Applications of DEC: Fluid Mechanics and Meshing. Fluid Models (I) Part I. Computational Fluids with DEC. Fluid Models (II) Fluid Models (I)
 Part I. Computational Fluids with DEC. Fluid Models (II) Fluid Models (I)") Applications of DEC: Fluid Mechanics and Meshing Mathieu Desbrun Applied Geometry Lab Overview Putting DEC to good use Fluids, fluids, fluids geometric interpretation of classical models discrete geometric
Applications of DEC: Fluid Mechanics and Meshing Mathieu Desbrun Applied Geometry Lab Overview Putting DEC to good use Fluids, fluids, fluids geometric interpretation of classical models discrete geometric
The clique number of a random graph in (,1 2) Let ( ) # -subgraphs in = 2 =: ( ) 2 ( ) ( )
 Let ( ) # -subgraphs in = 2 =: ( ) 2 ( ) ( )") 1 The clique number of a random graph in (,1 2) Let () # -subgraphs in = 2 =:() We will be interested in s.t. ()~1. To gain some intuition note ()~ 2 =2 and so ~2log. Now let us work rigorously. () (+1)
1 The clique number of a random graph in (,1 2) Let () # -subgraphs in = 2 =:() We will be interested in s.t. ()~1. To gain some intuition note ()~ 2 =2 and so ~2log. Now let us work rigorously. () (+1)
4.2 Simplicial Homology Groups
 4.2. SIMPLICIAL HOMOLOGY GROUPS 93 4.2 Simplicial Homology Groups 4.2.1 Simplicial Complexes Let p 0, p 1,... p k be k + 1 points in R n, with k n. We identify points in R n with the vectors that point
4.2. SIMPLICIAL HOMOLOGY GROUPS 93 4.2 Simplicial Homology Groups 4.2.1 Simplicial Complexes Let p 0, p 1,... p k be k + 1 points in R n, with k n. We identify points in R n with the vectors that point
Definition A metric space is proper if all closed balls are compact. The length pseudo metric of a metric space X is given by.
 Chapter 1 Geometry: Nuts and Bolts 1.1 Metric Spaces Definition 1.1.1. A metric space is proper if all closed balls are compact. The length pseudo metric of a metric space X is given by (x, y) inf p. p:x
Chapter 1 Geometry: Nuts and Bolts 1.1 Metric Spaces Definition 1.1.1. A metric space is proper if all closed balls are compact. The length pseudo metric of a metric space X is given by (x, y) inf p. p:x
Ma/CS 6b Class 9: Euler s Formula
 Ma/CS 6b Class 9: Euler s Formula By Adam Sheffer Recall: Plane Graphs A plane graph is a drawing of a graph in the plane such that the edges are noncrossing curves. 1 Recall: Planar Graphs The drawing
Ma/CS 6b Class 9: Euler s Formula By Adam Sheffer Recall: Plane Graphs A plane graph is a drawing of a graph in the plane such that the edges are noncrossing curves. 1 Recall: Planar Graphs The drawing
Shape Modeling. Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell. CS 523: Computer Graphics, Spring 2011
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry Primer Smooth Definitions Discrete Theory in a Nutshell 2/15/2011 1 Motivation Geometry processing: understand geometric characteristics,
Surface Mesh Generation
 Surface Mesh Generation J.-F. Remacle Université catholique de Louvain September 22, 2011 0 3D Model For the description of the mesh generation process, let us consider the CAD model of a propeller presented
Surface Mesh Generation J.-F. Remacle Université catholique de Louvain September 22, 2011 0 3D Model For the description of the mesh generation process, let us consider the CAD model of a propeller presented
Lecture 0: Reivew of some basic material
 Lecture 0: Reivew of some basic material September 12, 2018 1 Background material on the homotopy category We begin with the topological category TOP, whose objects are topological spaces and whose morphisms
Lecture 0: Reivew of some basic material September 12, 2018 1 Background material on the homotopy category We begin with the topological category TOP, whose objects are topological spaces and whose morphisms
GAUSS-BONNET FOR DISCRETE SURFACES
 GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
GAUSS-BONNET FOR DISCRETE SURFACES SOHINI UPADHYAY Abstract. Gauss-Bonnet is a deep result in differential geometry that illustrates a fundamental relationship between the curvature of a surface and its
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W