Bayesian Active Appearance Models
|
|
|
- Fay Flynn
- 5 years ago
- Views:
Transcription
.")
1 Bayesian Active Appearance Models Joan Alabort-i-Medina Stefanos Zafeiriou Department of Computing, Imperial College London, United Kingdom Abstract In this paper we provide the first, to the best of our knowledge, Bayesian formulation of one of the most successful and well-studied statistical models of shape and texture, i.e. Active Appearance Models (AAMs). To this end, we use a simple probabilistic model for texture generation assuming both Gaussian noise and a Gaussian prior over a latent texture space. We retrieve the shape parameters by formulating a novel cost function obtained by marginalizing out the latent texture space. This results in a fast implementation when compared to other simultaneous algorithms for fitting AAMs, mainly due to the removal of the calculation of texture parameters. We demonstrate that, contrary to what is believed regarding the performance of AAMs in generic fitting scenarios, optimization of the proposed cost function produces results that outperform discriminatively trained state-of-the-art methods in the problem of facial alignment in the wild. 1. Introduction The construction and fitting of deformable models is a very active area of research in computer vision because of its great importance in robust articulated object detection, recognition and tracking. One of the most well-studied technique for building and fitting deformable models are Active Appearance Models (AAMs) [1, 2] and the closely related 3D Morphable Models [3]. AAMs use statistical models to describe shape and texture variation. In particular, a statistical model of shape is built from a set of (manually) annotated fiducial points describing the shape of the object of interest. In order to approximately retain only the variability that is attributed to non-rigid deformations, the shape points are put in correspondence (usually by removing global similarity transforms using Generalized Procustes Analisys [2]) 1. Similarly, a statistical model of the texture is built using images of the object that have been normalized with 1 Dense shape models such as 3D Morphable Models use more complicated procedures to arrange the shapes in correspondence [3]. Figure 1: Our Bayesian formulation fits AAMs by minimizing two different distances: (i) the Mahalanobis distance within the latent texture subspace W and (ii) the Euclidean distance within its orthogonal complement W weighted by the inverse of the estimated sample noise. respect to the shape points (so-called shape-free textures). This requires a predefined reference frame (usually defined in terms of the mean shape) and a global motion model or warp W(p) (e.g. Piece-Wise Affine [2] or Thin Plate Spline [1, 4]). The two main assumptions behind AAMs are that (1) for every test (unseen) image there exists a test shape and set of texture weights for which the test shape can be warped onto the reference frame and expressed as a linear combination of the shape-free training textures and (2) the test shape can be written as a linear combination of the training shapes. In mathematical terms let S = { s, B R 2p n } and T = { m, U R F m } be the linear models for the shape and texture, respectively (where p is the number of shape points, F the number of pixels on the reference frame and n and m denote the number of bases of the shape and texture models, respectively). Then, according to the above assumptions, given a test shape s R 2p 1 and its corresponding test image x we have the two following approximation s s + Bp (1) x(w(p)) m + Uc where x(w(p)) R F 1 is the vectorized shape-free texture of the test image (from now onwards, for simplicity, we will write x(p) instead of x(w(p))). Under the previous assumption the parameters p and c are retrieved by 1
2 minimizing the sum of squared errors between the previous shape-free texture and its reconstruction by the statistical texture model p o, c o = arg min p,c x(p) (m + Uc) 2 P (2) where P are appropriate projection operators and x 2 P = x T Px. The solution of the above optimization problem is referred to as model fitting. Several works have been proposed to solve the previous optimization problem [5, 4, 2, 1]. Most notable methodologies include the regression-based method of [1], the very fast project-out inverse compositional algorithm (PIC) [2] (which has been heavily criticized for its inability to perform well under generic fitting scenarios, i.e., fit images of unseen identities), the simultaneous inverse compositional algorithm [5], and a variation of the simultaneous inverse compositional algorithm that operates in a projected space [4]. A complete project-out compositional framework for fitting AAMs was proposed in [6]. Due to the popularity of the PIC algorithm [2], mainly because of its extremely low computational complexity, methodologies such as [4, 6], which can provide near real-time fitting, have not received much attention. AAMs are often criticized for a variety of reasons. The most common is that defining a linear statistical model of texture that explains variations in identity, expressions, pose and illumination, is a very challenging task, especially in the intensity domain. Furthermore, the large variation in facial appearance makes it very difficult to perform regression from texture differences to shape parameters. Additionally, occlusion cannot be easily handled, and, in general, require the application of robust estimators on the l 2 2-loss function in Eq. (2). Finally, joint optimization with respect to shape and texture parameters may create numerous local minima in the cost function making it difficult for the algorithms to reach optimal solutions. Due to the above limitations, recent research on facial alignment has focused on generative and discriminant fitting of part-based models [7, 8, 9] (i.e. models which do not define a complete holistic texture model of the object) and on regression-based techniques that directly learn mappings from image features to shape parameters or landmark locations [10, 11]. The main advantages of part-based models are a natural handling of partial occlusions (since they only model certain parts of the object) and, most importantly, the fact that they are optimized only with respect to shape (they do not define parametric models of texture). Notable examples include Constrained Local Models (CLMs) [7] and the tree-based model of [8] (which can be also used for object detection). More recently, Asthana et al. [9] proposed a robust discriminative framework for fitting CLMs which achieved state-of-the-art results in the problem of facial alignment in the wild. On the other hand, recent regression-based approaches have focused on combining cascade-regression methods with the use of highly engineered nonlinear image features [10, 11]. In particular, the supervised descent method of [11], which learns a sequence of simple linear regressors from SIFT features to a non-parametric shape representation, is considered to be the state-of-the-art approach to facial alignment in the wild. In this paper, we examine the problem of fitting AAMs under a Bayesian perspective. Summarizing, our key contributions are: To provide a novel Bayesian formulation of AAMs. To this end, we use a simple probabilistic model for texture generation assuming both Gaussian noise and a Gaussian prior over a latent texture space (i.e., c). By marginalizing out the latent texture space, we derive a novel cost function that only depends on shape parameters and propose an efficient compositional algorithm to optimize it (the proposed cost function is motivated by seminal works on probabilistic component analysis and object tracking [12, 13, 14]) To present the first in-depth comparison between the existent gradient descent algorithms for fitting AAMs [2, 5, 4, 6] to images acquired in the wild. To show that our Bayesian AAM approach (and others [4]) can outperform state-of-the-art methods in facial alignment such as the Robust Discriminative Response Map Fitting (DRMF) for CLMs of [9] and the Supervised Descent Method (SDM) of [11]. The remainder of the paper is structured as follows. Section 2 reviews Principal Component Analysis (PCA) and Probabilistic PCA (PPCA). Section 3 outlines the existent gradient descent algorithms for fitting AAMs. Our novel Bayesian AAM formulation is introduced in Section 4. Experimental results are shown in Section 5. Finally, conclusions are drawn in Section Principal Component Analysis (PCA) and Probabilistic PCA In the majority of cases, the statistical models of shape and texture used in AAMs are defined using Principal Component Analysis [15]. In this section we will briefly review both deterministic and probabilistic versions of PCA. The deterministic version of PCA finds a set of orthonormal projection bases U so that the latent space C is the projection of the mean-centered training set X = [x 1 m,..., x n m] onto U (i.e. C = U T X). The optimization problem is defined as follows U o = arg max U tr [ U T SU ], s.t. U T U = I (3)
3 where S = 1 N T i=1 (x i m)(x i m) T = 1 N X X is the total scatter matrix and I the identity matrix. The optimal M projection bases matrix U o are recovered by keeping the M eigenvectors U = [u 1,..., u M ] that correspond to the M largest eigenvalues of S (in the following we will assume that the eigenvalues are stored in a diagonal matrix Λ = diag{[λ 1,..., λ M ]}). Probabilistic versions of PCA (PPCA) were independently proposed in [14, 12, 13] 2. In these works the following probabilistic generative model was defined: x = Wc + m + ɛ c N (0, I) ɛ N (0, σ 2 I) where W is the matrix that relates the latent variables c with the observed sample x and ɛ is the sample noise which is assumed to be an isotropic Gaussian. The motivation is that, when N < F, the latent variables will offer a more compact representation of the dependencies between the observations. Denoting the parameters as θ = {W, σ 2, m}, the posterior probability over the latent variables is given by (4) p(c x, θ) = N (M 1 W T (x m), σ 2 M 1 ) (5) where M = W T W + σ 2 I (note that here the bases W are not required to be orthonormal). Using a Maximum Likelihood (ML) approach the parameters θ are found by solving θ o = arg min θ = arg min θ ln n i=1 p(x i θ) ln n i=1 c p(x i c, θ) p(c) dc. with the optimal W, σ 2 and m given by W = U(Λ σ 2 I) 1/2 R σ 2 = 1 N M N j=m+1 λ i m = 1 N N i=1 x i. where R is an arbitrary M M orthogonal matrix. An alternative to the ML approach is to use an Expectation Maximization (EM) procedure where the first and second order moments of the latent space (E[c i ] and E[c i c T i ]) are also found. The EM solutions for the parameters can be found in [16, 12]. Several variations of probabilistic PCA have been proposed, e.g. by incorporating sparseness and nonnegative constraints [17] or changing the Gaussian models for others (such as the Student-t model of [18]). In the upcoming sections, we first review existent algorithms for fitting AAMs and then proceed to define a novel fitting strategy using the previous probabilistic model as a generative model of texture. 2 In particular the Maximum Likelihood (ML) solutions where provided in [12, 13], while Expectation Maximization (EM) solutions where presented in [12, 14] (6) (7) 3. Fitting Active Appearance Models Before we describe our Bayesian AAM formulation, we briefly outline the main algorithms that have been proposed to solve the optimization problem defined by Eq. (2). In this paper, we limit the discussion to compositional Gauss- Newton algorithms [2, 5, 4, 6] for fitting AAMs and, consequently, we will not review discriminative and regression based approaches. For such methods the reader is referred to the existent literature [19, 1, 20, 21]. In a compositional framework, Gauss-Newton algorithms iteratively solve Eq. (2) with respect to the shape parameters p by (i) introducing an incremental warp W(δp), (ii) performing a first order Taylor expansion of the residual term with respect to δp, (iii) solving for δp and (iv) computing the optimal shape parameters p o by composing the incremental warp W(δp o ) with the current estimate of the warp W(p c ). Depending on whether the algorithm is forward or inverse the incremental warp is placed on the image (forward) or model (inverse) side, and the corresponding linearization and composition performed according to this choice. In both settings, the incremental warp is linearized around the identity warp (denoted by δp = 0). Mathematically, the forward setting is defined by the following linearizations and update rules x(p c δp) (m + Uc) e(p c ) + J x δp and the inverse W(p o ) W(p c ) W(δp o ) x(p c ) (m(δp) + U(δp)c) e(p c ) J m δp W(p o ) W(p c ) W(δp o ) 1 (9) where e(p c ) = x(p c ) (m+uc) is the so-called error image and where J x, R F n and J m, R F n are the image and model Jacobians evaluated at δp = 0, respectively. By using the chain rule, the previous Jacobians can be further expanded as W x W p details on how to compute W and W (m + Uc) W p (8). For further p and on warp composition and inversion the interested reader is referred to [2] and [4]. In general, the optimization of Eq. (2) with respect to the texture parameters c is algorithm dependent Project Out Inverse Compositional The most popular and fastest algorithm for solving Eq. (2) is the so-called project out inverse compositional algorithm 3 which was first proposed in [22] for performing rigid alignment with linear texture variations. This algorithm eliminates the need to solve for the texture parameters c by working on the orthogonal complement of the texture subspace U (i.e. Ū = I UUT ). Consequently, the incremental warp δp is estimated only using the mean m of the 3 Inverse compositional algorithms became very popular after [2].
4 texture model δp o = arg min δp x(p c ) m(δp) 2 I UU T (10) The problem is solved by linearizing over m(δp) = m + J m δp. By defining J m = (I UU T ) J m the iterative updates are given by δp = ( J T m J m ) 1 J T m(x(p c ) m) (11) The computation of ( J T m J m ) 1 J T m is performed offline, hence the complexity of each update is only O(nN + n 2 ) Simultaneous Inverse Compositional The simultaneous inverse compositional algorithm [5], finds, simultaneously, shape and texture increments (δp and δc) by solving the following optimization problem δp o, δc o = arg min x(p c ) (m(δp)+u(δp)(c c +δc) 2 δp,δc (12) Let δq = [δp T, δc T ] T be the concatenation of the parameters and let U(δp) U + [J 1 δp... J m δp] be the linearization of the bases, where J i is the Jacobian with respect to each component u i. The updates of the parameters are given by δq = (J T t J t ) 1 J T t (x(p c ) (m + Uc) (13) where the total Jacobian J t = [J U, U] and J U = J m + K i=1 ci cj i (neglecting second order terms of the form δc T Aδp). Even though J m and all individual Jacobians J i can be precomputed, the computation of the J t must be performed at each step due to its dependency on the current estimate of the texture parameters c c. Thus, the total cost per iteration is O((n + m) 2 N + (n + m) 3 ) 3.3. Alternating Optimization Approaches The variation of the simultaneous inverse compositional algorithm proposed in [4] solves two different problems, in an alternating manner, one for the shape and one for the appearance, as δp o = arg min δp δc o = arg min δc The update for δp is given by x(p c ) (m(δp) + U(δp)c c 2 I UU T x(p c ) (m(δp o ) + U(δp o )(c c + δc)) 2 (14) δp = ( J T U J U ) 1 J T U(x(p c ) m) (15) where J U = (I UU T )J U. Similarly as before, J m and all J i can be precomputed, but J U has to be computed at each iteration because of its dependancy on c c. Given the optimum δp o, δc 0 is obtained by solving the second optimization problem in Eq. (14) δc = U T (x(p c ) (m + Uc c + J U δp o )) (16) By performing expansions of the update in Eq. (15) with regards to the projection operation I UU T, it has been shown [4] that the method is of complexity O(m 2 n 2 +(m+ n)n + n 3 ). 4. Probabilistic Models for fitting AAMs Let us consider again the probabilistic generative model defined in Eq. 4. For a particular test image x(p) we have x(p) = Wc + m + ɛ c N (0, Λ) ɛ N (0, σ 2 I) (17) where W, m and σ 2 have been learned in the training phase (from a set of training shape-free textures). Notice that we have changed the prior over the latent space such that it is a multivariate Gaussian distribution with variance equal to the eigenvalues Λ (instead of I). Furthermore, for simplicity and without loss of generality, we assume that W is orthonormal (i.e., W T W = I). Our aim is to define a ML procedure to retrieve the optimal shape parameters p o using the above generative model. This can be done by defining the following optimization problem p o = arg max p = arg max p ln p(x(p) θ) ln c p(x(p) c, θ)p(c θ)dc (18) where the texture parameters c are marginalized out and the marginalized density p(x(p) θ) is given by p(x(p)) = N (m, WΛW T + σ 2 I) (19) Using Eq. (19), the optimization problem in Eq.(18) can be reformulated as p o = arg min p = arg min p x(p) m 2 (WΛW T +σ 2 I) 1 x(p) m 2 WD 1 W T + 1 σ 2 x(p) m 2 I WW T where we used the Woodbury formula (WLW T + σ 2 I) 1 = WD 1 W T + 1 σ 2 (I WW T ) (20) (21) where D is a diagonal matrix defined as D = diag[λ 1 + σ 2,, λ M + σ 2 ]. Hence, as in [13], our cost function is comprised of two different distances: (i) the Mahalanobis distance within
 can be well reconstructed by the texture")
5 the latent texture subspace W and (ii) the Euclidean distance within its orthogonal complement W = I WW T weighted by the inverse of the estimated sample noise σ 2. The first of these distances favors solutions with higher probability within latent subspace W, acting as a regularizer that ensures the solution x(p o ) can be well reconstructed by the texture model. The second distance captures everything that cannot be generated by the texture model (e.g. occlusions and other unseen variations) and weights it with respect to the estimated sample noise 4. Note that, the contribution of the second term 1 σ x(p) 2 m 2 I WW decreases as the estimated sample noise increases. On the other hand, when the variance Λ of the T prior over the latent subspace increases (and especially as Λ ) c becomes uniformly distributed and the contribution of the first term x(p) m 2 WD 1 W vanishes. T Hence, under our Bayesian formulation, the project-out inverse compositional algorithm in Section 3.1 naturally stems from assuming a uniform prior over the latent texture space. On the contrary, our ML formulation uses both distances to retrieve the optimal shape parameters. To the best of our knowledge the above cost function has not been used for estimating parameters in a deformable model fitting framework. A novel forward compositional algorithm is proposed to solve the optimization problem defined in Eq. (20). As we demonstrate below, the algorithm is efficient as only shape parameters need to be recovered δp o = arg min δp x(p c δp) m 2 WD 1 W + T (22) 1 σ x(p 2 c δp) m 2 I WW T The problem can be solved by linearizing over x(p c δp) x(p c ) + J x δp and the update is given by δp = ( J T x J x ) 1 J T x (x(p c ) m) (23) where J x = (WD 1 W T + 1 σ 2 (I WW T ))J x. In order to reduce the computation complexity of the algorithm we expand the Hessian as J T x J x = 1 σ 2 J T x J x (W T J x ) T AW T J x (24) where A = ( 1 σ 2 I D 1 ). Note that the term J T x (x(p c ) m) can also be reformulated as J T x (x(p c ) m) = J T x x(p c) where x(p c ) = 1 σ 2 (x(p c ) m) (W T (x(p c ) m)) T AW T (x(p c ) m) (25) Using the above expansions the computational complexity of the update is of order O(mnK + n 2 K + n 3 ), which is 4 This weighting corrects the size of the Gauss-Newton step taken within the orthogonal subspace W (effectively addressing a well known problem of the original inverse compositional algorithm [23]) σ noise = 0 σ noise = 4 σ noise = 10 Figure 2: Exemplar initializations obtained by varying the value σ noise in the described initialization procedure. Note that, when σ noise = 0 the initialization is equivalent to applying the correct scale and translation transforms to the mean shape. On the other hand, increasing values of σ noise produce more challenging initialization. similar or even lower (as m increases) to the complexity of [4]. We would like to clarify that our approach susbtancially differs from previous probabilistic formulations of AAMs [24]. In [24] a methodology that uses a K-mixture of PPCA to define AAMs is proposed. This mixture-aam is fitted to new images by independently fitting K different AAMs (one for each mixture) using the project-out inverse compositional algorithm (PIC). In a way, [24] can be considered to automatize previous work in view-based AAMs where different AAMs (mainly view specific [25]) are independently fitted to a novel image. Consequently, in the one mixture case, the algorithm is equivalent to PIC. Finally, we want to note that multi-view and mixture of subspaces can be also used in our Bayesian framework, but we opted to show the power of our approach in the most difficult case, i.e. by using a single subspace (which is also faster and easier to build and fit). 5. Experiments In this section we evaluate the performance of our Bayesian AAMs formulation on the problem of facial alignment in the wild. We performed two different experiments. The first one compares the proposed methodology with other existent gradient descent algorithms for fitting AAMs [2, 5, 4] on the popular LFPW [26] database. In the second experiment, we test our approach against two recently proposed state-ofart methods [9, 11] for facial alignment by performing two challenging cross-database experiments on the recently proposed Helen [27] and AFW [8] databases. Performance in both experiments is reported using the error measure proposed in [8] for the 49 interior points (excluding the face boundary) shown in figures Fig. 2 and Fig 7.
6 5.1. Comparison with other AAM fitting algorithms We start by evaluating the relative performance of the proposed algorithm with respect to the existent Gradient Descent algorithms reviewed in Section 3 (i.e. the projectout inverse compositional algorithm [2], the simultaneous inverse compositional algorithm [5] and the alternative simultaneous inverse compositional algorithm proposed in [4] which we abbreviate as PIC, SIC and AIC respectively; the proposed algorithm is abbreviated as PROB). This experiment is performed on the popular Labeled Faces Parts in the Wild (LFPW) [26] database. The original LFPW database consisted of 1400 URLs to images, 1100 for training and 300 for testing, that could be downloaded from the Internet. All images were acquired in the wild and contain large variations in identity, pose, illumination, expression and occlusion. Unfortunately some of the original URLs are no longer valid. We were able to download 813 training images and 224 test images for which we used the 68-point annotations provided by the authors of [28, 29] (which can be downloaded from [30]). All methods were trained using the available 813 training images and results are reported on the 224 testing images that remain available. For this experiment, we used Normalized pixel Intensities (NI) as the texture representation used to build the texture model of all AAM algorithms. Furthermore, in order to provide a little insight on the convergence properties of our method, given a particular test image, all methods are initialized by randomly perturbing the correct global similarity transform (without considering in-plane rotations) and applying it to the mean shape of the shape model (a frontal pose and neutral expression looking shape). The similarity transform is perturbed using a similar procedure as the one described in [2], where the parameter σ noise controls the magnitude of the random Gaussian noise added to perform the perturbation. Exemplar initializations obtained by this procedure are shown in Fig. 2. Results for this experiment are shown in Fig. 3 and Fig. 4 (for visual inspection, please see the fitting results in Fig. 7 and our supplementary material). Fig. 3 shows the Cumulative Error Distribution (CED) curves obtained by initializing all methods using σ noise = 4. Fig. 4 shows the error bars and median error of the SIC-NI, AIC-NI and PROB-IC methods (PIC-NI did not fit on the graph) for increasing values of σ noise. The results show that our approach (PROB-NI) considerably outperforms all other methods by a considerable large margin. More specifically, our Bayesian algorithm achieves improvements of at least 10% over all other algorithms at the significant region < err > (region at which results are generally considered adequate by visual inspection). It is also worth noticing the good performance achieved by the alternating inverse compositional algorithm (AIC-NI) which, to our surprise, had barely been used in the AAMs literature be- Figure 3: CED curves for σ noise = 4 on the LFPW database. Figure 4: Fitting statistics obtained by initializing with different values of σ noise on the LFPW database. fore. Notice that, both PROB-NI and AIC-NI are also fairly robust against the magnitude of σ noise. Finally, the remaining AAMs algorithms: the simultaneous inverse compositional (SIC-NI) and specially the project-out inverse compositional (PIC-NI) perform poorly Comparison with state-of-the-art methods In this experiment we tested the performance of our Bayesian AAM formulation, against the Robust Discriminative Response Map Fitting (DRMF) for CLMs of [9] and the Supervised Descent Method (SDM) of [11]. As before, all AAM algorithms were trained on the available 813 training images of the LFPW dataset. Results for [11] and [9] were directly obtained using the code and models provided by the authors which can be downloaded from [31] and [32] respectively (note that these models were potentially trained using thousands of images, in comparison to the only 813 images used to trained our models). Results are reported on the 330 testing images of the Helen [27] database and on the entire 337 images of the AFW [8]
7 Figure 5: CED curves on the Helen database. Method Median Mean Std SDM DRMF AIC-ES PROB-NI PROB-ES Table 1: Fitting statistics for the Helen databse. Figure 6: CED curves on the AFW database. Method Median Mean Std SDM DRMF AIC-ES PROB-NI PROB-ES Table 2: Fitting statistics for the AFW database. database. Ground truth annotations for both databases were again downloaded from [30]. Note that, compared to the previous LFPW, the images of Helen and specially of AFW appear to be much more natural and rich in variations and, consequently, are even more difficult to fit. Both [9] and [11] take full advantage of powerful nonlinear image features (i.e. HoG and SIFT, respectively) to achieve state-of-the-art results. For this reason, in this experiment, we use the Edge Structure (ES) features proposed in [33] as the texture representation used to build the texture model of our approach (the use of HoG and SIFT features in AAMs has never been investigated in the existent literature and lies out of the scope of this paper). For the sake of completeness, we also report results for our method using normalized intensities and for AIC using the same edge structure features. Results for these experiments are shown in Fig. 6 and Fig. 5 and Table 1 and Table 2 (for visual inspection please see the fitting results in Fig. 7 and our supplementary material). We report CED curves and fitting statistics obtained by initializing all methods using the bounding box initializations provided by [30], which were obtained using the face detector of [8]. The results show that our approach (PROB-ES) achieves state-of-the-art results in both databases, largely outperforming the DRMF and performing marginally better than SDM (our approach is more accurate but slightly less robust). We find this results remarkable, specially considering that our Bayesian approach was trained using only 811 images in comparison to the poten- tially thousands of images used to trained the DRMF and SDM methods. 6. Conclusions In this paper we present a novel Bayesian formulation of AAMs. In particular, by marginalizing out the latent texture space we derive a novel cost function that depends only on the shape parameters and propose a novel fitting algorithm to optimize it. We show that our Bayesian AAM formulation outperforms the most recently proposed state-of-the-art methods for facial alignment in the wild in two extremelly challenging cross-database experiments. Acknowledgements The work of Joan Alabort-i-Medina was funded by a DTA studentship from Imperial College London and by the Qualcomm Innovation Fellowship. The work of Stefanos Zafeiriou was partially funded by the EPSRC project EP/J017787/1 (4DFAB). References [1] T. F. Cootes, G. J. Edwards, and C. J. Taylor, Active appearance models, IEEE Transactions on Pattern Analysis and Machine Intelligence, , 2, 3 [2] I. Matthews and S. Baker, Active appearance models revisited, International Journal of Computer Vision, , 2, 3, 5, 6 [3] V. Blanz and T. Vetter, A morphable model for the synthesis of 3d faces, in SIGGRAPH,
 (using normalized pixel intensities as image")
. [4] G.")

![active appearance model fitting, in CVPR, 2008. 1, 2, 3, 4, 5, 6 [5] R.](/docs-images/88/115217100/images/8-4.jpg "Gross, I. Matthews, and S. Baker, Generic vs.")



![International Journal of Computer Vision, 2011. 2 [8] X. Zhu and D.](/docs-images/88/115217100/images/8-8.jpg "Ramanan, Face detection, pose estimation, and landmark localization in")
![the wild, in CVPR, 2012. 2, 5, 6, 7 [9] A. Asthana, S. Zafeiriou, S.](/docs-images/88/115217100/images/8-9.jpg "Cheng, and M.")


![2 [11] Xuehan-Xiong and F.](/docs-images/88/115217100/images/8-12.jpg "De la Torre, Supervised descent method and its application to face")
![alignment, in CVPR, 2013. 2, 5, 6, 7 [12] M.](/docs-images/88/115217100/images/8-13.jpg "E. Tipping and C. M.")
, 1999.")
![2, 3 [13] B. Moghaddam and A.](/docs-images/88/115217100/images/8-15.jpg "Pentland, Probabilistic visual learning for object representation,")



![, Pattern recognition and machine learning. MIT Press, 2006. 3 [17] Y.](/docs-images/88/115217100/images/8-19.jpg "Guan and J. G.")



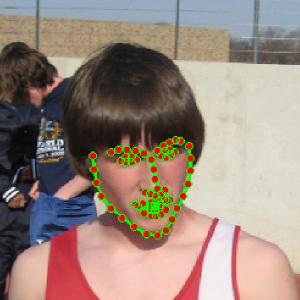
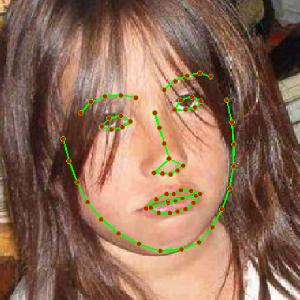


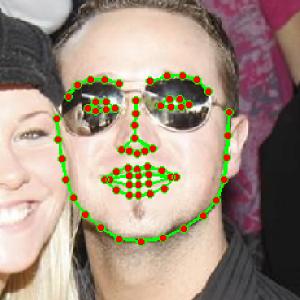
8 Figure 7: Selected results from our method on the 3 databases: LFPW (first row) (using normalized pixel intensities as image representation), Helen (second row) and AWF (third row) (both using edge structure features as image representation). [4] G. Papandreou and P. Maragos, Adaptive and constrained algorithms for inverse compositional active appearance model fitting, in CVPR, , 2, 3, 4, 5, 6 [5] R. Gross, I. Matthews, and S. Baker, Generic vs. person specific active appearance models, Image and Vision Computing, , 3, 4, 5, 6 [6] B. Amberg, A. Blake, and T. Vetter, On compositional image alignment, with an application to active appearance models, in CVPR, , 3 [7] J. M. Saragih, S. Lucey, and J. F. Cohn, Deformable model fitting by regularized landmark mean-shift, International Journal of Computer Vision, [8] X. Zhu and D. Ramanan, Face detection, pose estimation, and landmark localization in the wild, in CVPR, , 5, 6, 7 [9] A. Asthana, S. Zafeiriou, S. Cheng, and M. Pantic, Robust discriminative response map fitting with constrained local models, in CVPR, , 5, 6, 7 [10] X. Cao, Y. Wei, F. Wen, and J. Sun, Face alignment by explicit shape regression, in CVPR, [11] Xuehan-Xiong and F. De la Torre, Supervised descent method and its application to face alignment, in CVPR, , 5, 6, 7 [12] M. E. Tipping and C. M. Bishop, Probabilistic principal component analysis, Journal of the Royal Statistical Society: Series B (Statistical Methodology), , 3 [13] B. Moghaddam and A. Pentland, Probabilistic visual learning for object representation, Pattern Analysis and Machine Intelligence, IEEE Transactions on, , 3, 4 [14] S. Roweis, Em algorithms for pca and spca, Advances in neural information processing systems, , 3 [15] M. Turk and A. Pentland, Eigenfaces for recognition, Journal of cognitive neuroscience, [16] C. M. Bishop et al., Pattern recognition and machine learning. MIT Press, [17] Y. Guan and J. G. Dy, Sparse probabilistic principal component analysis, in AISTATS, [18] Z. Khan and F. Dellaert, Robust generative subspace modeling: The subspace t distribution, [19] A. U. Batur and M. H. Hayes, Adaptive active appearance models, IEEE Transactions on Image Processing, [20] X. Liu, Discriminative face alignment, IEEE Transactions on Pattern Analysis and Machine Intelligence, [21] J. Saragih and R. Go cke, Learning aam fitting through simulation, Pattern Recognition, [22] S. Baker and I. Matthews, Lucas-kanade 20 years on: A unifying framework, International Journal of Computer Vision, [23] S. Baker, R. Gross, and I. Matthews, Lucas-kanade 20 years on: A unifying framework: Part 3, CMU - Robotics Institute, Tech. Rep. CMU-RI-TR-03-35, [24] L. van der Maaten and E. Hendriks, Capturing appearance variation in active appearance models, in CVPR-W, [25] T. Cootes, K. Walker, and C. Taylor, View-based active appearance models, in FG, [26] P. N. Belhumeur, D. W. Jacobs, D. J. Kriegman, and N. Kumar, Localizing parts of faces using a consensus of exemplars, in CVPR, , 6 [27] V. Le, J. Brandt, Z. Lin, L. D. Bourdev, and T. S. Huang, Interactive facial feature localization, in ECCV, , 6 [28] C. Sagonas, G. Tzimiropoulos, S. Zafeiriou, and M. Pantic, A semi-automatic methodology for facial landmark annotation, in CVPR-W, [29], 300 faces in-the-wild challenge: The first facial landmark localization challenge, in ICCV-W, [30] 6, 7 [31] 6 [32] 6 [33] T. Cootes and C. Taylor, On representing edge structure for model matching, in CVPR,
SUPPLEMENTARY MATERIAL FOR: ADAPTIVE CASCADED REGRESSION
 SUPPLEMENTARY MATERIAL FOR: ADAPTIVE CASCADED REGRESSION Epameinondas Antonakos,, Patrick Snape,, George Trigeorgis, Stefanos Zafeiriou, Department of Computing, Imperial College London, U.K. Center for
SUPPLEMENTARY MATERIAL FOR: ADAPTIVE CASCADED REGRESSION Epameinondas Antonakos,, Patrick Snape,, George Trigeorgis, Stefanos Zafeiriou, Department of Computing, Imperial College London, U.K. Center for
Optimization problems for fast AAM fitting in-the-wild
 2013 IEEE International Conference on Computer Vision Optimization problems for fast AAM fitting in-the-wild Georgios Tzimiropoulos 1. School of Computer Science University of Lincoln, U.K. 2. Department
2013 IEEE International Conference on Computer Vision Optimization problems for fast AAM fitting in-the-wild Georgios Tzimiropoulos 1. School of Computer Science University of Lincoln, U.K. 2. Department
Generic Active Appearance Models Revisited
 Generic Active Appearance Models Revisited Georgios Tzimiropoulos 1,2, Joan Alabort-i-Medina 1, Stefanos Zafeiriou 1, and Maja Pantic 1,3 1 Department of Computing, Imperial College London, United Kingdom
Generic Active Appearance Models Revisited Georgios Tzimiropoulos 1,2, Joan Alabort-i-Medina 1, Stefanos Zafeiriou 1, and Maja Pantic 1,3 1 Department of Computing, Imperial College London, United Kingdom
Active Pictorial Structures
 Active Pictorial Structures Epameinondas Antonakos Joan Alabort-i-Medina Stefanos Zafeiriou Department of Computing, Imperial College London 180 Queens Gate, SW7 2AZ, London, U.K. {e.antonakos, ja310,
Active Pictorial Structures Epameinondas Antonakos Joan Alabort-i-Medina Stefanos Zafeiriou Department of Computing, Imperial College London 180 Queens Gate, SW7 2AZ, London, U.K. {e.antonakos, ja310,
Occluded Facial Expression Tracking
 Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
SIMULTANEOUS CASCADED REGRESSION. Pedro Martins, Jorge Batista. Institute of Systems and Robotics, University of Coimbra, Portugal
 SIMULTANEOUS CASCADED REGRESSION Pedro Martins, Jorge Batista Institute of Systems and Robotics, University of Coimbra, Portugal ABSTRACT This paper addresses the problem of localizing facial landmarks
SIMULTANEOUS CASCADED REGRESSION Pedro Martins, Jorge Batista Institute of Systems and Robotics, University of Coimbra, Portugal ABSTRACT This paper addresses the problem of localizing facial landmarks
22 October, 2012 MVA ENS Cachan. Lecture 5: Introduction to generative models Iasonas Kokkinos
 Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
Machine Learning for Computer Vision 1 22 October, 2012 MVA ENS Cachan Lecture 5: Introduction to generative models Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Center for Visual Computing Ecole Centrale Paris
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Image Coding with Active Appearance Models
 Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Project-Out Cascaded Regression with an application to Face Alignment
 Project-Out Cascaded Regression with an application to Face Alignment Georgios Tzimiropoulos School of Computer Science University of Nottingham, U.K. yorgos.tzimiropoulos@nottingham.ac.uk Abstract Cascaded
Project-Out Cascaded Regression with an application to Face Alignment Georgios Tzimiropoulos School of Computer Science University of Nottingham, U.K. yorgos.tzimiropoulos@nottingham.ac.uk Abstract Cascaded
Locating Facial Landmarks Using Probabilistic Random Forest
 2324 IEEE SIGNAL PROCESSING LETTERS, VOL. 22, NO. 12, DECEMBER 2015 Locating Facial Landmarks Using Probabilistic Random Forest Changwei Luo, Zengfu Wang, Shaobiao Wang, Juyong Zhang, and Jun Yu Abstract
2324 IEEE SIGNAL PROCESSING LETTERS, VOL. 22, NO. 12, DECEMBER 2015 Locating Facial Landmarks Using Probabilistic Random Forest Changwei Luo, Zengfu Wang, Shaobiao Wang, Juyong Zhang, and Jun Yu Abstract
Automatic Construction of Active Appearance Models as an Image Coding Problem
 Automatic Construction of Active Appearance Models as an Image Coding Problem Simon Baker, Iain Matthews, and Jeff Schneider The Robotics Institute Carnegie Mellon University Pittsburgh, PA 1213 Abstract
Automatic Construction of Active Appearance Models as an Image Coding Problem Simon Baker, Iain Matthews, and Jeff Schneider The Robotics Institute Carnegie Mellon University Pittsburgh, PA 1213 Abstract
Intensity-Depth Face Alignment Using Cascade Shape Regression
 Intensity-Depth Face Alignment Using Cascade Shape Regression Yang Cao 1 and Bao-Liang Lu 1,2 1 Center for Brain-like Computing and Machine Intelligence Department of Computer Science and Engineering Shanghai
Intensity-Depth Face Alignment Using Cascade Shape Regression Yang Cao 1 and Bao-Liang Lu 1,2 1 Center for Brain-like Computing and Machine Intelligence Department of Computer Science and Engineering Shanghai
3D Active Appearance Model for Aligning Faces in 2D Images
 3D Active Appearance Model for Aligning Faces in 2D Images Chun-Wei Chen and Chieh-Chih Wang Abstract Perceiving human faces is one of the most important functions for human robot interaction. The active
3D Active Appearance Model for Aligning Faces in 2D Images Chun-Wei Chen and Chieh-Chih Wang Abstract Perceiving human faces is one of the most important functions for human robot interaction. The active
Active Appearance Models
 Active Appearance Models Edwards, Taylor, and Cootes Presented by Bryan Russell Overview Overview of Appearance Models Combined Appearance Models Active Appearance Model Search Results Constrained Active
Active Appearance Models Edwards, Taylor, and Cootes Presented by Bryan Russell Overview Overview of Appearance Models Combined Appearance Models Active Appearance Model Search Results Constrained Active
Cascaded Regression with Sparsified Feature Covariance Matrix for Facial Landmark Detection
 1 Pattern Recognition Letters journal homepage: www.elsevier.com Cascaded Regression with Sparsified Feature Covariance Matrix for Facial Landmark Detection Enrique Sánchez-Lozano, Brais Martinez, Michel
1 Pattern Recognition Letters journal homepage: www.elsevier.com Cascaded Regression with Sparsified Feature Covariance Matrix for Facial Landmark Detection Enrique Sánchez-Lozano, Brais Martinez, Michel
Facial Expression Analysis
 Facial Expression Analysis Jeff Cohn Fernando De la Torre Human Sensing Laboratory Tutorial Looking @ People June 2012 Facial Expression Analysis F. De la Torre/J. Cohn Looking @ People (CVPR-12) 1 Outline
Facial Expression Analysis Jeff Cohn Fernando De la Torre Human Sensing Laboratory Tutorial Looking @ People June 2012 Facial Expression Analysis F. De la Torre/J. Cohn Looking @ People (CVPR-12) 1 Outline
Robust Facial Landmark Detection under Significant Head Poses and Occlusion
 Robust Facial Landmark Detection under Significant Head Poses and Occlusion Yue Wu Qiang Ji ECSE Department, Rensselaer Polytechnic Institute 110 8th street, Troy, NY, USA {wuy9,jiq}@rpi.edu Abstract There
Robust Facial Landmark Detection under Significant Head Poses and Occlusion Yue Wu Qiang Ji ECSE Department, Rensselaer Polytechnic Institute 110 8th street, Troy, NY, USA {wuy9,jiq}@rpi.edu Abstract There
Face View Synthesis Across Large Angles
 Face View Synthesis Across Large Angles Jiang Ni and Henry Schneiderman Robotics Institute, Carnegie Mellon University, Pittsburgh, PA 1513, USA Abstract. Pose variations, especially large out-of-plane
Face View Synthesis Across Large Angles Jiang Ni and Henry Schneiderman Robotics Institute, Carnegie Mellon University, Pittsburgh, PA 1513, USA Abstract. Pose variations, especially large out-of-plane
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Evaluating Error Functions for Robust Active Appearance Models
 Evaluating Error Functions for Robust Active Appearance Models Barry-John Theobald School of Computing Sciences, University of East Anglia, Norwich, UK, NR4 7TJ bjt@cmp.uea.ac.uk Iain Matthews and Simon
Evaluating Error Functions for Robust Active Appearance Models Barry-John Theobald School of Computing Sciences, University of East Anglia, Norwich, UK, NR4 7TJ bjt@cmp.uea.ac.uk Iain Matthews and Simon
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Supervised Descent Method and its Applications to Face Alignment
 23 IEEE Conference on Computer Vision and Pattern Recognition Supervised Descent Method and its Applications to Face Alignment Xuehan Xiong Fernando De la Torre The Robotics Institute, Carnegie Mellon
23 IEEE Conference on Computer Vision and Pattern Recognition Supervised Descent Method and its Applications to Face Alignment Xuehan Xiong Fernando De la Torre The Robotics Institute, Carnegie Mellon
The Nottingham eprints service makes this work by researchers of the University of Nottingham available open access under the following conditions.
 Sagonas, Christos and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja (2013) 300 Faces in-the-wild Challenge: the first facial landmark localization challenge. In: 2013 IEEE International
Sagonas, Christos and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja (2013) 300 Faces in-the-wild Challenge: the first facial landmark localization challenge. In: 2013 IEEE International
Active Wavelet Networks for Face Alignment
 Active Wavelet Networks for Face Alignment Changbo Hu, Rogerio Feris, Matthew Turk Dept. Computer Science, University of California, Santa Barbara {cbhu,rferis,mturk}@cs.ucsb.edu Abstract The active appearance
Active Wavelet Networks for Face Alignment Changbo Hu, Rogerio Feris, Matthew Turk Dept. Computer Science, University of California, Santa Barbara {cbhu,rferis,mturk}@cs.ucsb.edu Abstract The active appearance
Face Tracking. Synonyms. Definition. Main Body Text. Amit K. Roy-Chowdhury and Yilei Xu. Facial Motion Estimation
 Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Face Tracking Amit K. Roy-Chowdhury and Yilei Xu Department of Electrical Engineering, University of California, Riverside, CA 92521, USA {amitrc,yxu}@ee.ucr.edu Synonyms Facial Motion Estimation Definition
Fitting a Single Active Appearance Model Simultaneously to Multiple Images
 Fitting a Single Active Appearance Model Simultaneously to Multiple Images Changbo Hu, Jing Xiao, Iain Matthews, Simon Baker, Jeff Cohn, and Takeo Kanade The Robotics Institute, Carnegie Mellon University
Fitting a Single Active Appearance Model Simultaneously to Multiple Images Changbo Hu, Jing Xiao, Iain Matthews, Simon Baker, Jeff Cohn, and Takeo Kanade The Robotics Institute, Carnegie Mellon University
Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild
 Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild Yuxiang Zhou Epameinondas Antonakos Joan Alabort-i-Medina Anastasios Roussos Stefanos Zafeiriou, Department of Computing,
Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild Yuxiang Zhou Epameinondas Antonakos Joan Alabort-i-Medina Anastasios Roussos Stefanos Zafeiriou, Department of Computing,
Tweaked residual convolutional network for face alignment
 Journal of Physics: Conference Series PAPER OPEN ACCESS Tweaked residual convolutional network for face alignment To cite this article: Wenchao Du et al 2017 J. Phys.: Conf. Ser. 887 012077 Related content
Journal of Physics: Conference Series PAPER OPEN ACCESS Tweaked residual convolutional network for face alignment To cite this article: Wenchao Du et al 2017 J. Phys.: Conf. Ser. 887 012077 Related content
Learn to Combine Multiple Hypotheses for Accurate Face Alignment
 2013 IEEE International Conference on Computer Vision Workshops Learn to Combine Multiple Hypotheses for Accurate Face Alignment Junjie Yan Zhen Lei Dong Yi Stan Z. Li Center for Biometrics and Security
2013 IEEE International Conference on Computer Vision Workshops Learn to Combine Multiple Hypotheses for Accurate Face Alignment Junjie Yan Zhen Lei Dong Yi Stan Z. Li Center for Biometrics and Security
The Template Update Problem
 The Template Update Problem Iain Matthews, Takahiro Ishikawa, and Simon Baker The Robotics Institute Carnegie Mellon University Abstract Template tracking dates back to the 1981 Lucas-Kanade algorithm.
The Template Update Problem Iain Matthews, Takahiro Ishikawa, and Simon Baker The Robotics Institute Carnegie Mellon University Abstract Template tracking dates back to the 1981 Lucas-Kanade algorithm.
One Millisecond Face Alignment with an Ensemble of Regression Trees
 One Millisecond Face Alignment with an Ensemble of Regression Trees Vahid Kazemi and Josephine Sullivan KTH, Royal Institute of Technology Computer Vision and Active Perception Lab Teknikringen 14, Stockholm,
One Millisecond Face Alignment with an Ensemble of Regression Trees Vahid Kazemi and Josephine Sullivan KTH, Royal Institute of Technology Computer Vision and Active Perception Lab Teknikringen 14, Stockholm,
Extended Supervised Descent Method for Robust Face Alignment
 Extended Supervised Descent Method for Robust Face Alignment Liu Liu, Jiani Hu, Shuo Zhang, Weihong Deng Beijing University of Posts and Telecommunications, Beijing, China Abstract. Supervised Descent
Extended Supervised Descent Method for Robust Face Alignment Liu Liu, Jiani Hu, Shuo Zhang, Weihong Deng Beijing University of Posts and Telecommunications, Beijing, China Abstract. Supervised Descent
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
In Between 3D Active Appearance Models and 3D Morphable Models
 In Between 3D Active Appearance Models and 3D Morphable Models Jingu Heo and Marios Savvides Biometrics Lab, CyLab Carnegie Mellon University Pittsburgh, PA 15213 jheo@cmu.edu, msavvid@ri.cmu.edu Abstract
In Between 3D Active Appearance Models and 3D Morphable Models Jingu Heo and Marios Savvides Biometrics Lab, CyLab Carnegie Mellon University Pittsburgh, PA 15213 jheo@cmu.edu, msavvid@ri.cmu.edu Abstract
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
OVer the last few years, cascaded-regression (CR) based
 based") 1 Random Cascaded-Regression Copse for Robust Facial Landmark Detection Zhen-Hua Feng 1,2, Student Member, IEEE, Patrik Huber 2, Josef Kittler 2, Life Member, IEEE, William Christmas 2, and Xiao-Jun Wu
1 Random Cascaded-Regression Copse for Robust Facial Landmark Detection Zhen-Hua Feng 1,2, Student Member, IEEE, Patrik Huber 2, Josef Kittler 2, Life Member, IEEE, William Christmas 2, and Xiao-Jun Wu
Probabilistic Facial Feature Extraction Using Joint Distribution of Location and Texture Information
 Probabilistic Facial Feature Extraction Using Joint Distribution of Location and Texture Information Mustafa Berkay Yilmaz, Hakan Erdogan, Mustafa Unel Sabanci University, Faculty of Engineering and Natural
Probabilistic Facial Feature Extraction Using Joint Distribution of Location and Texture Information Mustafa Berkay Yilmaz, Hakan Erdogan, Mustafa Unel Sabanci University, Faculty of Engineering and Natural
Enhanced Active Shape Models with Global Texture Constraints for Image Analysis
 Enhanced Active Shape Models with Global Texture Constraints for Image Analysis Shiguang Shan, Wen Gao, Wei Wang, Debin Zhao, Baocai Yin Institute of Computing Technology, Chinese Academy of Sciences,
Enhanced Active Shape Models with Global Texture Constraints for Image Analysis Shiguang Shan, Wen Gao, Wei Wang, Debin Zhao, Baocai Yin Institute of Computing Technology, Chinese Academy of Sciences,
Discriminative Deep Face Shape Model for Facial Point Detection
 Noname manuscript No. (will be inserted by the editor) Discriminative Deep Face Shape Model for Facial Point Detection Yue Wu Qiang Ji Received: 9 Feb. 24 / Accepted: Oct. 24 Abstract Facial point detection
Noname manuscript No. (will be inserted by the editor) Discriminative Deep Face Shape Model for Facial Point Detection Yue Wu Qiang Ji Received: 9 Feb. 24 / Accepted: Oct. 24 Abstract Facial point detection
Face frontalization for Alignment and Recognition
 Face frontalization for Alignment and Recognition Christos Sagonas, Yannis Panagakis, Stefanos Zafeiriou, and Maja Pantic Department of Computing, EEMCS, Imperial College London, University of Twente,
Face frontalization for Alignment and Recognition Christos Sagonas, Yannis Panagakis, Stefanos Zafeiriou, and Maja Pantic Department of Computing, EEMCS, Imperial College London, University of Twente,
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
Constrained Local Neural Fields for robust facial landmark detection in the wild
 y4 θ5θ sθ sθ x4 y θ5θ5θ sθ sθ θ x y5 θ5θ5θ sθ sθ x5 y2 θ5θ5θ sθ sθ θ2 x2 y4 θ5θ sθ sθ x4 y θ5θ5θ sθ sθ θ x y5 θ5θ5θ sθ sθ x5 y2 θ5θ5θ sθ sθ θ2 x2 y4 θ5θ sθ sθ x4 y θ5θ5θ sθ sθ θ x y5 θ5θ5θ sθ sθ x5 y2
y4 θ5θ sθ sθ x4 y θ5θ5θ sθ sθ θ x y5 θ5θ5θ sθ sθ x5 y2 θ5θ5θ sθ sθ θ2 x2 y4 θ5θ sθ sθ x4 y θ5θ5θ sθ sθ θ x y5 θ5θ5θ sθ sθ x5 y2 θ5θ5θ sθ sθ θ2 x2 y4 θ5θ sθ sθ x4 y θ5θ5θ sθ sθ θ x y5 θ5θ5θ sθ sθ x5 y2
FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE. Chubu University 1200, Matsumoto-cho, Kasugai, AICHI
 FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE Masatoshi Kimura Takayoshi Yamashita Yu Yamauchi Hironobu Fuyoshi* Chubu University 1200, Matsumoto-cho,
FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE Masatoshi Kimura Takayoshi Yamashita Yu Yamauchi Hironobu Fuyoshi* Chubu University 1200, Matsumoto-cho,
Robust FEC-CNN: A High Accuracy Facial Landmark Detection System
 Robust FEC-CNN: A High Accuracy Facial Landmark Detection System Zhenliang He 1,2 Jie Zhang 1,2 Meina Kan 1,3 Shiguang Shan 1,3 Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Robust FEC-CNN: A High Accuracy Facial Landmark Detection System Zhenliang He 1,2 Jie Zhang 1,2 Meina Kan 1,3 Shiguang Shan 1,3 Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Sparse Shape Registration for Occluded Facial Feature Localization
 Shape Registration for Occluded Facial Feature Localization Fei Yang, Junzhou Huang and Dimitris Metaxas Abstract This paper proposes a sparsity driven shape registration method for occluded facial feature
Shape Registration for Occluded Facial Feature Localization Fei Yang, Junzhou Huang and Dimitris Metaxas Abstract This paper proposes a sparsity driven shape registration method for occluded facial feature
Face detection and recognition. Many slides adapted from K. Grauman and D. Lowe
 Face detection and recognition Many slides adapted from K. Grauman and D. Lowe Face detection and recognition Detection Recognition Sally History Early face recognition systems: based on features and distances
Face detection and recognition Many slides adapted from K. Grauman and D. Lowe Face detection and recognition Detection Recognition Sally History Early face recognition systems: based on features and distances
Light Field Appearance Manifolds
 Light Field Appearance Manifolds Chris Mario Christoudias, Louis-Philippe Morency, and Trevor Darrell Computer Science and Artificial Intelligence Laboratory Massachussetts Institute of Technology Cambridge,
Light Field Appearance Manifolds Chris Mario Christoudias, Louis-Philippe Morency, and Trevor Darrell Computer Science and Artificial Intelligence Laboratory Massachussetts Institute of Technology Cambridge,
Nonlinear Hierarchical Part-Based Regression for Unconstrained Face Alignment
 Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence (IJCAI-6) Nonlinear Hierarchical Part-Based Regression for Unconstrained Face Alignment Xiang Yu, Zhe Lin, Shaoting
Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence (IJCAI-6) Nonlinear Hierarchical Part-Based Regression for Unconstrained Face Alignment Xiang Yu, Zhe Lin, Shaoting
Visual Tracking (1) Pixel-intensity-based methods
 Pixel-intensity-based methods") Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Pixel-intensity-based methods Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
On the Dimensionality of Deformable Face Models
 On the Dimensionality of Deformable Face Models CMU-RI-TR-06-12 Iain Matthews, Jing Xiao, and Simon Baker The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract
On the Dimensionality of Deformable Face Models CMU-RI-TR-06-12 Iain Matthews, Jing Xiao, and Simon Baker The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract
Kanade Lucas Tomasi Tracking (KLT tracker)
") Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Kanade Lucas Tomasi Tracking (KLT tracker) Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 26,
Facial Landmark Tracking by Tree-based Deformable Part Model Based Detector
 Facial Landmark Tracking by Tree-based Deformable Part Model Based Detector Michal Uřičář, Vojtěch Franc, and Václav Hlaváč Department of Cybernetics, Faculty Electrical Engineering Czech Technical University
Facial Landmark Tracking by Tree-based Deformable Part Model Based Detector Michal Uřičář, Vojtěch Franc, and Václav Hlaváč Department of Cybernetics, Faculty Electrical Engineering Czech Technical University
Face Refinement through a Gradient Descent Alignment Approach
 Face Refinement through a Gradient Descent Alignment Approach Simon Lucey, Iain Matthews Robotics Institute, Carnegie Mellon University Pittsburgh, PA 113, USA Email: slucey@ieee.org, iainm@cs.cmu.edu
Face Refinement through a Gradient Descent Alignment Approach Simon Lucey, Iain Matthews Robotics Institute, Carnegie Mellon University Pittsburgh, PA 113, USA Email: slucey@ieee.org, iainm@cs.cmu.edu
Face Alignment Refinement
 Face Alignment Refinement Andy Zeng Vishnu Naresh Boddeti Kris M. Kitani Robotics Institute, Carnegie Mellon University andyzeng@berkeley.edu naresh@cmu.edu Takeo Kanade {kkitani,tk}@cs.cmu.edu Abstract
Face Alignment Refinement Andy Zeng Vishnu Naresh Boddeti Kris M. Kitani Robotics Institute, Carnegie Mellon University andyzeng@berkeley.edu naresh@cmu.edu Takeo Kanade {kkitani,tk}@cs.cmu.edu Abstract
Parametric Manifold of an Object under Different Viewing Directions
 Parametric Manifold of an Object under Different Viewing Directions Xiaozheng Zhang 1,2, Yongsheng Gao 1,2, and Terry Caelli 3 1 Biosecurity Group, Queensland Research Laboratory, National ICT Australia
Parametric Manifold of an Object under Different Viewing Directions Xiaozheng Zhang 1,2, Yongsheng Gao 1,2, and Terry Caelli 3 1 Biosecurity Group, Queensland Research Laboratory, National ICT Australia
Facial shape tracking via spatio-temporal cascade shape regression
 Facial shape tracking via spatio-temporal cascade shape regression Jing Yang nuist yj@126.com Jiankang Deng jiankangdeng@gmail.com Qingshan Liu Kaihua Zhang zhkhua@gmail.com qsliu@nuist.edu.cn Nanjing
Facial shape tracking via spatio-temporal cascade shape regression Jing Yang nuist yj@126.com Jiankang Deng jiankangdeng@gmail.com Qingshan Liu Kaihua Zhang zhkhua@gmail.com qsliu@nuist.edu.cn Nanjing
Facial Feature Points Tracking Based on AAM with Optical Flow Constrained Initialization
 Journal of Pattern Recognition Research 7 (2012) 72-79 Received Oct 24, 2011. Revised Jan 16, 2012. Accepted Mar 2, 2012. Facial Feature Points Tracking Based on AAM with Optical Flow Constrained Initialization
Journal of Pattern Recognition Research 7 (2012) 72-79 Received Oct 24, 2011. Revised Jan 16, 2012. Accepted Mar 2, 2012. Facial Feature Points Tracking Based on AAM with Optical Flow Constrained Initialization
Topic-aware Deep Auto-encoders (TDA) for Face Alignment
 for Face Alignment") Topic-aware Deep Auto-encoders (TDA) for Face Alignment Jie Zhang 1,2, Meina Kan 1, Shiguang Shan 1, Xiaowei Zhao 3, and Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Topic-aware Deep Auto-encoders (TDA) for Face Alignment Jie Zhang 1,2, Meina Kan 1, Shiguang Shan 1, Xiaowei Zhao 3, and Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Enforcing Non-Positive Weights for Stable Support Vector Tracking
 Enforcing Non-Positive Weights for Stable Support Vector Tracking Simon Lucey Robotics Institute, Carnegie Mellon University slucey@ieee.org Abstract In this paper we demonstrate that the support vector
Enforcing Non-Positive Weights for Stable Support Vector Tracking Simon Lucey Robotics Institute, Carnegie Mellon University slucey@ieee.org Abstract In this paper we demonstrate that the support vector
Face Alignment with Part-Based Modeling
 KAZEMI, SULLIVAN: FACE ALIGNMENT WITH PART-BASED MODELING 1 Face Alignment with Part-Based Modeling Vahid Kazemi vahidk@nada.kth.se Josephine Sullivan sullivan@nada.kth.se CVAP KTH Institute of Technology
KAZEMI, SULLIVAN: FACE ALIGNMENT WITH PART-BASED MODELING 1 Face Alignment with Part-Based Modeling Vahid Kazemi vahidk@nada.kth.se Josephine Sullivan sullivan@nada.kth.se CVAP KTH Institute of Technology
Multi-View AAM Fitting and Camera Calibration
 To appear in the IEEE International Conference on Computer Vision Multi-View AAM Fitting and Camera Calibration Seth Koterba, Simon Baker, Iain Matthews, Changbo Hu, Jing Xiao, Jeffrey Cohn, and Takeo
To appear in the IEEE International Conference on Computer Vision Multi-View AAM Fitting and Camera Calibration Seth Koterba, Simon Baker, Iain Matthews, Changbo Hu, Jing Xiao, Jeffrey Cohn, and Takeo
arxiv: v1 [cs.cv] 29 Jan 2016
![arxiv: v1 [cs.cv] 29 Jan 2016](/thumbs/93/111268398.jpg "arxiv: v1 [cs.cv] 29 Jan 2016") Face Alignment by Local Deep Descriptor Regression arxiv:1601.07950v1 [cs.cv] 29 Jan 2016 Amit Kumar University of Maryland College Park, MD 20742 akumar14@umd.edu Abstract Rajeev Ranjan University of
Face Alignment by Local Deep Descriptor Regression arxiv:1601.07950v1 [cs.cv] 29 Jan 2016 Amit Kumar University of Maryland College Park, MD 20742 akumar14@umd.edu Abstract Rajeev Ranjan University of
2D vs. 3D Deformable Face Models: Representational Power, Construction, and Real-Time Fitting
 2D vs. 3D Deformable Face Models: Representational Power, Construction, and Real-Time Fitting Iain Matthews, Jing Xiao, and Simon Baker The Robotics Institute, Carnegie Mellon University Epsom PAL, Epsom
2D vs. 3D Deformable Face Models: Representational Power, Construction, and Real-Time Fitting Iain Matthews, Jing Xiao, and Simon Baker The Robotics Institute, Carnegie Mellon University Epsom PAL, Epsom
On-line, Incremental Learning of a Robust Active Shape Model
 On-line, Incremental Learning of a Robust Active Shape Model Michael Fussenegger 1, Peter M. Roth 2, Horst Bischof 2, Axel Pinz 1 1 Institute of Electrical Measurement and Measurement Signal Processing
On-line, Incremental Learning of a Robust Active Shape Model Michael Fussenegger 1, Peter M. Roth 2, Horst Bischof 2, Axel Pinz 1 1 Institute of Electrical Measurement and Measurement Signal Processing
Shape Augmented Regression for 3D Face Alignment
 Shape Augmented Regression for 3D Face Alignment Chao Gou 1,3(B),YueWu 2, Fei-Yue Wang 1,3, and Qiang Ji 2 1 Institute of Automation, Chinese Academy of Sciences, Beijing, China {gouchao2012,feiyue.wang}@ia.ac.cn
Shape Augmented Regression for 3D Face Alignment Chao Gou 1,3(B),YueWu 2, Fei-Yue Wang 1,3, and Qiang Ji 2 1 Institute of Automation, Chinese Academy of Sciences, Beijing, China {gouchao2012,feiyue.wang}@ia.ac.cn
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Face analysis : identity vs. expressions
 Face analysis : identity vs. expressions Hugo Mercier 1,2 Patrice Dalle 1 1 IRIT - Université Paul Sabatier 118 Route de Narbonne, F-31062 Toulouse Cedex 9, France 2 Websourd 3, passage André Maurois -
Face analysis : identity vs. expressions Hugo Mercier 1,2 Patrice Dalle 1 1 IRIT - Université Paul Sabatier 118 Route de Narbonne, F-31062 Toulouse Cedex 9, France 2 Websourd 3, passage André Maurois -
DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS
 DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS Sylvain Le Gallou*, Gaspard Breton*, Christophe Garcia*, Renaud Séguier** * France Telecom R&D - TECH/IRIS 4 rue du clos
DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS Sylvain Le Gallou*, Gaspard Breton*, Christophe Garcia*, Renaud Séguier** * France Telecom R&D - TECH/IRIS 4 rue du clos
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Face Alignment Across Large Poses: A 3D Solution
 Face Alignment Across Large Poses: A 3D Solution Outline Face Alignment Related Works 3D Morphable Model Projected Normalized Coordinate Code Network Structure 3D Image Rotation Performance on Datasets
Face Alignment Across Large Poses: A 3D Solution Outline Face Alignment Related Works 3D Morphable Model Projected Normalized Coordinate Code Network Structure 3D Image Rotation Performance on Datasets
Learning to Recognize Faces in Realistic Conditions
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
arxiv: v1 [cs.cv] 2 May 2016
![arxiv: v1 [cs.cv] 2 May 2016](/thumbs/86/93079061.jpg "arxiv: v1 [cs.cv] 2 May 2016") 16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
Localizing Facial Keypoints with Global Descriptor Search, Neighbour Alignment and Locally Linear Models
 2013 IEEE International Conference on Computer Vision Workshops Localizing Facial Keypoints with Global Descriptor Search, Neighbour Alignment and Locally Linear Models Md. Kamrul Hasan 1, Christopher
2013 IEEE International Conference on Computer Vision Workshops Localizing Facial Keypoints with Global Descriptor Search, Neighbour Alignment and Locally Linear Models Md. Kamrul Hasan 1, Christopher
A Fully End-to-End Cascaded CNN for Facial Landmark Detection
 2017 IEEE 12th International Conference on Automatic Face & Gesture Recognition A Fully End-to-End Cascaded CNN for Facial Landmark Detection Zhenliang He 1,2 Meina Kan 1,3 Jie Zhang 1,2 Xilin Chen 1 Shiguang
2017 IEEE 12th International Conference on Automatic Face & Gesture Recognition A Fully End-to-End Cascaded CNN for Facial Landmark Detection Zhenliang He 1,2 Meina Kan 1,3 Jie Zhang 1,2 Xilin Chen 1 Shiguang
Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects
 Tracking of Feature Points and Planar Rigid Objects") Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Tracking of Feature Points and Planar Rigid Objects Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
arxiv: v2 [cs.cv] 6 Aug 2016
![arxiv: v2 [cs.cv] 6 Aug 2016](/thumbs/72/66811707.jpg "arxiv: v2 [cs.cv] 6 Aug 2016") arxiv:1608.01137v2 [cs.cv] 6 Aug 2016 Cascaded Continuous Regression for Real-time Incremental Face Tracking Enrique Sánchez-Lozano, Brais Martinez, Georgios Tzimiropoulos, and Michel Valstar Computer
arxiv:1608.01137v2 [cs.cv] 6 Aug 2016 Cascaded Continuous Regression for Real-time Incremental Face Tracking Enrique Sánchez-Lozano, Brais Martinez, Georgios Tzimiropoulos, and Michel Valstar Computer
Vignette: Reimagining the Analog Photo Album
 Vignette: Reimagining the Analog Photo Album David Eng, Andrew Lim, Pavitra Rengarajan Abstract Although the smartphone has emerged as the most convenient device on which to capture photos, it lacks the
Vignette: Reimagining the Analog Photo Album David Eng, Andrew Lim, Pavitra Rengarajan Abstract Although the smartphone has emerged as the most convenient device on which to capture photos, it lacks the
3D Morphable Model Parameter Estimation
 3D Morphable Model Parameter Estimation Nathan Faggian 1, Andrew P. Paplinski 1, and Jamie Sherrah 2 1 Monash University, Australia, Faculty of Information Technology, Clayton 2 Clarity Visual Intelligence,
3D Morphable Model Parameter Estimation Nathan Faggian 1, Andrew P. Paplinski 1, and Jamie Sherrah 2 1 Monash University, Australia, Faculty of Information Technology, Clayton 2 Clarity Visual Intelligence,
Unified Face Analysis by Iterative Multi-Output Random Forests
 Unified Face Analysis by Iterative Multi-Output Random Forests Xiaowei Zhao Tae-Kyun Kim Wenhan Luo Department of EEE, Imperial College London, United Kingdom {x.zhao,tk.kim,w.luo12}@imperial.ac.uk Abstract
Unified Face Analysis by Iterative Multi-Output Random Forests Xiaowei Zhao Tae-Kyun Kim Wenhan Luo Department of EEE, Imperial College London, United Kingdom {x.zhao,tk.kim,w.luo12}@imperial.ac.uk Abstract
Object. Radiance. Viewpoint v
 Fisher Light-Fields for Face Recognition Across Pose and Illumination Ralph Gross, Iain Matthews, and Simon Baker The Robotics Institute, Carnegie Mellon University 5000 Forbes Avenue, Pittsburgh, PA 15213
Fisher Light-Fields for Face Recognition Across Pose and Illumination Ralph Gross, Iain Matthews, and Simon Baker The Robotics Institute, Carnegie Mellon University 5000 Forbes Avenue, Pittsburgh, PA 15213
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Lucas-Kanade Image Registration Using Camera Parameters
 Lucas-Kanade Image Registration Using Camera Parameters Sunghyun Cho a, Hojin Cho a, Yu-Wing Tai b, Young Su Moon c, Junguk Cho c, Shihwa Lee c, and Seungyong Lee a a POSTECH, Pohang, Korea b KAIST, Daejeon,
Lucas-Kanade Image Registration Using Camera Parameters Sunghyun Cho a, Hojin Cho a, Yu-Wing Tai b, Young Su Moon c, Junguk Cho c, Shihwa Lee c, and Seungyong Lee a a POSTECH, Pohang, Korea b KAIST, Daejeon,
Generalized Principal Component Analysis CVPR 2007
 Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
Generalized Principal Component Analysis Tutorial @ CVPR 2007 Yi Ma ECE Department University of Illinois Urbana Champaign René Vidal Center for Imaging Science Institute for Computational Medicine Johns
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
The Conditional Lucas-Kanade Algorithm
 The Conditional Lucas-Kanade Algorithm Chen-Hsuan Lin CMU-RI-TR-16-27 June 2016 The Robotics Institute School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Thesis Committee: Simon
The Conditional Lucas-Kanade Algorithm Chen-Hsuan Lin CMU-RI-TR-16-27 June 2016 The Robotics Institute School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213 Thesis Committee: Simon
Face Image Synthesis and Interpretation Using 3D Illumination-Based AAM Models
 Face Image Synthesis and Interpretation Using 3D Illumination-Based AAM Models 40 Salvador E. Ayala-Raggi, Leopoldo Altamirano-Robles and Janeth Cruz-Enriquez Instituto Nacional de Astrofísica Óptica y
Face Image Synthesis and Interpretation Using 3D Illumination-Based AAM Models 40 Salvador E. Ayala-Raggi, Leopoldo Altamirano-Robles and Janeth Cruz-Enriquez Instituto Nacional de Astrofísica Óptica y
Structured Face Hallucination
 2013 IEEE Conference on Computer Vision and Pattern Recognition Structured Face Hallucination Chih-Yuan Yang Sifei Liu Ming-Hsuan Yang Electrical Engineering and Computer Science University of California
2013 IEEE Conference on Computer Vision and Pattern Recognition Structured Face Hallucination Chih-Yuan Yang Sifei Liu Ming-Hsuan Yang Electrical Engineering and Computer Science University of California
Collaborative Facial Landmark Localization for Transferring Annotations Across Datasets
 Collaborative Facial Landmark Localization for Transferring Annotations Across Datasets Brandon M. Smith and Li Zhang University of Wisconsin Madison http://www.cs.wisc.edu/~lizhang/projects/collab-face-landmarks/
Collaborative Facial Landmark Localization for Transferring Annotations Across Datasets Brandon M. Smith and Li Zhang University of Wisconsin Madison http://www.cs.wisc.edu/~lizhang/projects/collab-face-landmarks/
A Hierarchical Probabilistic Model for Facial Feature Detection
 A Hierarchical Probabilistic Model for Facial Feature Detection Yue Wu Ziheng Wang Qiang Ji ECSE Department, Rensselaer Polytechnic Institute {wuy9,wangz1,jiq}@rpi.edu Abstract Facial feature detection
A Hierarchical Probabilistic Model for Facial Feature Detection Yue Wu Ziheng Wang Qiang Ji ECSE Department, Rensselaer Polytechnic Institute {wuy9,wangz1,jiq}@rpi.edu Abstract Facial feature detection
Facial Landmark Localization A Literature Survey
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347-5161 2014 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Review Article Dhananjay
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347-5161 2014 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Review Article Dhananjay
Semi-Supervised PCA-based Face Recognition Using Self-Training
 Semi-Supervised PCA-based Face Recognition Using Self-Training Fabio Roli and Gian Luca Marcialis Dept. of Electrical and Electronic Engineering, University of Cagliari Piazza d Armi, 09123 Cagliari, Italy
Semi-Supervised PCA-based Face Recognition Using Self-Training Fabio Roli and Gian Luca Marcialis Dept. of Electrical and Electronic Engineering, University of Cagliari Piazza d Armi, 09123 Cagliari, Italy
Tracking in image sequences
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Tracking in image sequences Lecture notes for the course Computer Vision Methods Tomáš Svoboda svobodat@fel.cvut.cz March 23, 2011 Lecture notes
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY Tracking in image sequences Lecture notes for the course Computer Vision Methods Tomáš Svoboda svobodat@fel.cvut.cz March 23, 2011 Lecture notes
Binary Principal Component Analysis
 1 Binary Principal Component Analysis Feng Tang and Hai Tao University of California, Santa Cruz tang tao@soe.ucsc.edu Abstract Efficient and compact representation of images is a fundamental problem in
1 Binary Principal Component Analysis Feng Tang and Hai Tao University of California, Santa Cruz tang tao@soe.ucsc.edu Abstract Efficient and compact representation of images is a fundamental problem in
Factorization with Missing and Noisy Data
 Factorization with Missing and Noisy Data Carme Julià, Angel Sappa, Felipe Lumbreras, Joan Serrat, and Antonio López Computer Vision Center and Computer Science Department, Universitat Autònoma de Barcelona,
Factorization with Missing and Noisy Data Carme Julià, Angel Sappa, Felipe Lumbreras, Joan Serrat, and Antonio López Computer Vision Center and Computer Science Department, Universitat Autònoma de Barcelona,
arxiv: v1 [cs.cv] 11 Jun 2015
![arxiv: v1 [cs.cv] 11 Jun 2015](/thumbs/92/109137547.jpg "arxiv: v1 [cs.cv] 11 Jun 2015") Pose-Invariant 3D Face Alignment Amin Jourabloo, Xiaoming Liu Department of Computer Science and Engineering Michigan State University, East Lansing MI 48824 {jourablo, liuxm}@msu.edu arxiv:506.03799v
Pose-Invariant 3D Face Alignment Amin Jourabloo, Xiaoming Liu Department of Computer Science and Engineering Michigan State University, East Lansing MI 48824 {jourablo, liuxm}@msu.edu arxiv:506.03799v
Dimension Reduction CS534
 Dimension Reduction CS534 Why dimension reduction? High dimensionality large number of features E.g., documents represented by thousands of words, millions of bigrams Images represented by thousands of
Dimension Reduction CS534 Why dimension reduction? High dimensionality large number of features E.g., documents represented by thousands of words, millions of bigrams Images represented by thousands of
Real-time non-rigid driver head tracking for driver mental state estimation
 Carnegie Mellon University Research Showcase @ CMU Robotics Institute School of Computer Science 2004 Real-time non-rigid driver head tracking for driver mental state estimation Simon Baker Carnegie Mellon
Carnegie Mellon University Research Showcase @ CMU Robotics Institute School of Computer Science 2004 Real-time non-rigid driver head tracking for driver mental state estimation Simon Baker Carnegie Mellon