One Millisecond Face Alignment with an Ensemble of Regression Trees
|
|
|
- Harry Banks
- 5 years ago
- Views:
Transcription




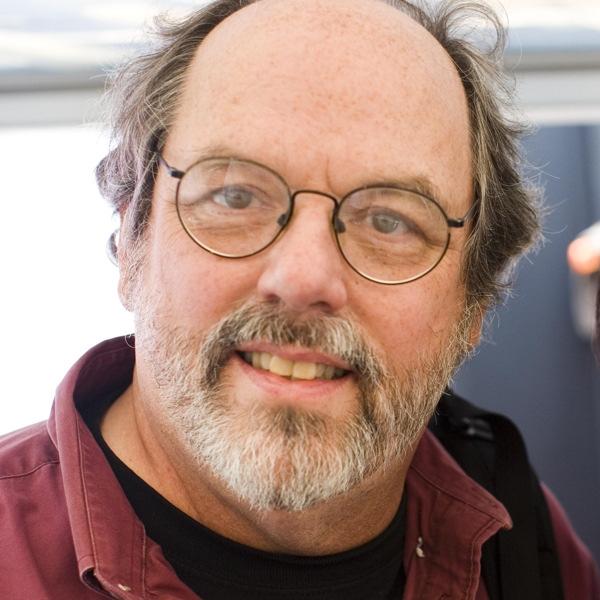
1 One Millisecond Face Alignment with an Ensemble of Regression Trees Vahid Kazemi and Josephine Sullivan KTH, Royal Institute of Technology Computer Vision and Active Perception Lab Teknikringen 14, Stockholm, Sweden Abstract This paper addresses the problem of Face Alignment for a single image. We show how an ensemble of regression trees can be used to estimate the face s landmark positions directly from a sparse subset of pixel intensities, achieving super-realtime performance with high quality predictions. We present a general framework based on gradient boosting for learning an ensemble of regression trees that optimizes the sum of square error loss and naturally handles missing or partially labelled data. We show how using appropriate priors exploiting the structure of image data helps with efficient feature selection. Different regularization strategies and its importance to combat overfitting are also investigated. In addition, we analyse the effect of the quantity of training data on the accuracy of the predictions and explore the effect of data augmentation using synthesized data. 1. Introduction In this paper we present a new algorithm that performs face alignment in milliseconds and achieves accuracy superior or comparable to state-of-the-art methods on standard datasets. The speed gains over previous methods is a consequence of identifying the essential components of prior face alignment algorithms and then incorporating them in a streamlined formulation into a cascade of high capacity regression functions learnt via gradient boosting. We show, as others have [8, 2], that face alignment can be solved with a cascade of regression functions. In our case each regression function in the cascade efficiently estimates the shape from an initial estimate and the intensities of a sparse set of pixels indexed relative to this initial estimate. Our work builds on the large amount of research over the last decade that has resulted in significant progress for face alignment [9, 4, 13, 7, 15, 1, 16, 18, 3, 6, 19]. In particular, we incorporate into our learnt regression functions two key elements that are present in several of the successful algorithms cited and we detail these elements now. Figure 1. Selected results on the HELEN dataset. An ensemble of randomized regression trees is used to detect 194 landmarks on face from a single image in a millisecond. The first revolves around the indexing of pixel intensities relative to the current estimate of the shape. The extracted features in the vector representation of a face image can greatly vary due to both shape deformation and nuisance factors such as changes in illumination conditions. This makes accurate shape estimation using these features difficult. The dilemma is that we need reliable features to accurately predict the shape, and on the other hand we need an accurate estimate of the shape to extract reliable features. Previous work [4, 9, 5, 8] as well as this work, use an iterative approach (the cascade) to deal with this problem. Instead of regressing the shape parameters based on features extracted in the global coordinate system of the image, the image is transformed to a normalized coordinate system based on a current estimate of the shape, and then the features are extracted to predict an update vector for the shape parameters. This process is usually repeated several times until convergence. The second considers how to combat the difficulty of the 1
2 inference/prediction problem. At test time, an alignment algorithm has to estimate the shape, a high dimensional vector, that best agrees with the image data and our model of shape. The problem is non-convex with many local optima. Successful algorithms [4, 9] handle this problem by assuming the estimated shape must lie in a linear subspace, which can be discovered, for example, by finding the principal components of the training shapes. This assumption greatly reduces the number of potential shapes considered during inference and can help to avoid local optima. Recent work [8, 11, 2] uses the fact that a certain class of regressors are guaranteed to produce predictions that lie in a linear subspace defined by the training shapes and there is no need for additional constraints. Crucially, our regression functions have these two elements. Allied to these two factors is our efficient regression function learning. We optimize an appropriate loss function and perform feature selection in a data-driven manner. In particular, we learn each regressor via gradient boosting [10] with a squared error loss function, the same loss function we want to minimize at test time. The sparse pixel set, used as the regressor s input, is selected via a combination of the gradient boosting algorithm and a prior probability on the distance between pairs of input pixels. The prior distribution allows the boosting algorithm to efficiently explore a large number of relevant features. The result is a cascade of regressors that can localize the facial landmarks when initialized with the mean face pose. The major contributions of this paper are 1. A novel method for alignment based on ensemble of regression trees that performs shape invariant feature selection while minimizing the same loss function during training time as we want to minimize at test time. 2. We present a natural extension of our method that handles missing or uncertain labels. 3. Quantitative and qualitative results are presented that confirm that our method produces high quality predictions while being much more efficient than the best previous method (Figure 1). 4. The effect of quantity of training data, use of partially labeled data and synthesized data on quality of predictions are analyzed. 2. Method This paper presents an algorithm to precisely estimate the position of facial landmarks in a computationally efficient way. Similar to previous works [8, 2] our proposed method utilizes a cascade of regressors. In the rest of this section we describe the details of the form of the individual components of the cascade and how we perform training The cascade of regressors To begin we introduce some notation. Let x i 2 R 2 be the x, y-coordinates of the ith facial landmark in an image I. Then the vector S =(x T 1, x T 2,...,x T p ) T 2 R 2p denotes the coordinates of all the p facial landmarks in I. Frequently, in this paper we refer to the vector S as the shape. We use Ŝ (t) to denote our current estimate of S. Each regressor, r t (, ), in the cascade predicts an update vector from the image and Ŝ(t) that is added to the current shape estimate Ŝ (t) to improve the estimate: Ŝ (t+1) = Ŝ(t) + r t (I,Ŝ(t) ) (1) The critical point of the cascade is that the regressor r t makes its predictions based on features, such as pixel intensity values, computed from I and indexed relative to the current shape estimate Ŝ(t). This introduces some form of geometric invariance into the process and as the cascade proceeds one can be more certain that a precise semantic location on the face is being indexed. Later we describe how this indexing is performed. Note that the range of outputs expanded by the ensemble is ensured to lie in a linear subspace of training data if the initial estimate Ŝ(0) belongs to this space. We therefore do not need to enforce additional constraints on the predictions which greatly simplifies our method. The initial shape can simply be chosen as the mean shape of the training data centered and scaled according to the bounding box output of a generic face detector. To train each r t we use the gradient tree boosting algorithm with a sum of square error loss as described in [10]. We now give the explicit details of this process Learning each regressor in the cascade Assume we have training data (I 1, S 1 ),...,(I n, S n ) where each I i is a face image and S i its shape vector. To learn the first regression function r 0 in the cascade we create from our training data triplets of a face image, an initial shape estimate and the target update step, that is, (I i, Ŝ(0) i, S (0) i ) where i 2{1,...,n} (2) Ŝ (0) i 2{S 1,...,S n }\S i and (3) S (0) i = S i Ŝ (0) i (4) for i =1,...,N. We set the total number of these triplets to N = nr where R is the number of initializations used per image I i. Each initial shape estimate for an image is sampled uniformly from {S 1,...,S n } without replacement. From this data we learn the regression function r 0 (see algorithm 1), using gradient tree boosting with a sum of square error loss. The set of training triplets is then updated
3 to provide the training data, (I i, Ŝ(1) i, S (1) i ), for the next regressor r 1 in the cascade by setting (with t =0) Ŝ (t+1) i = Ŝ(t) i + r t (I i, Ŝ(t) i ) (5) S (t+1) i = S i Ŝ (t+1) i (6) This process is iterated until a cascade of T regressors r 0,r 1,...,r T 1 are learnt which when combined give a sufficient level of accuracy. As stated each regressor r t is learned using the gradient boosting tree algorithm. It should be remembered that a square error loss is used and the residuals computed in the innermost loop correspond to the gradient of this loss function evaluated at each training sample. Included in the statement of the algorithm is a learning rate parameter 0 < apple 1 also known as the shrinkage factor. Setting <1helps combat over-fitting and usually results in regressors which generalize much better than those learnt with =1[10]. Algorithm 1 Learning r t in the cascade Have training data {(I i, Ŝ(t) i, S (t) i rate (shrinkage factor) 0 < <1 1. Initialise f 0 (I,Ŝ(t) ) = arg min 2R 2p 2. for k =1,...,K: (a) Set for i =1,...,N r ik = )} N i=1 NX k i=1 and the learning S (t) i k 2 S (t) i f k 1 (I i, Ŝ(t) i ) (b) Fit a regression tree to the targets r ik giving a weak regression function g k (I,Ŝ(t) ). (c) Update f k (I,Ŝ(t) )=f k 1 (I,Ŝ(t) )+ g k (I,Ŝ(t) ) 3. Output r t (I,Ŝ(t) )=f K (I,Ŝ(t) ) 2.3. Tree based regressor The core of each regression function r t is the tree based regressors fit to the residual targets during the gradient boosting algorithm. We now review the most important implementation details for training each regression tree Shape invariant split tests At each split node in the regression tree we make a decision based on thresholding the difference between the intensities of two pixels. The pixels used in the test are at positions u and v when defined in the coordinate system of the mean shape. For a face image with an arbitrary shape, we would like to index the points that have the same position relative to its shape as u and v have to the mean shape. To achieve this, the image can be warped to the mean shape based on the current shape estimate before extracting the features. Since we only use a very sparse representation of the image, it is much more efficient to warp the location of points as opposed to the whole image. Furthermore, a crude approximation of warping can be done using only a global similarity transform in addition to local translations as suggested by [2]. The precise details are as follows. Let k u be the index of the facial landmark in the mean shape that is closest to u and define its offset from u as x u = u x ku Then for a shape S i defined in image I i, the position in I i that is qualitatively similar to u in the mean shape image is given by u 0 = x i,ku + 1 s i R T i x u (7) where s i and R i are the scale and rotation matrix of the similarity transform which transforms S i to S, the mean shape. The scale and rotation are found to minimize px k x j (s i R i x i,j + t i )k 2 (8) j=1 the sum of squares between the mean shape s facial landmark points, x j s, and those of the warped shape. v 0 is similarly defined. Formally each split is a decision involving 3 parameters =(,u, v) and is applied to each training and test example as h(i i, Ŝ(t) i, ) = ( 1 I i (u 0 ) I i (v 0 ) > 0 otherwise where u 0 and v 0 are defined using the scale and rotation matrix which best warp Ŝ(t) i to S according to equation (7). In practice the assignments and local translations are determined during the training phase. Calculating the similarity transform, at test time the most computationally expensive part of this process, is only done once at each level of the cascade. (9)
4 2.3.2 Choosing the node splits For each regression tree, we approximate the underlying function with a piecewise constant function where a constant vector is fit to each leaf node. To train the regression tree we randomly generate a set of candidate splits, that is s, at each node. We then greedily choose the, from these candidates, which minimizes the sum of square error. If Q is the set of the indices of the training examples at a node, this corresponds to minimizing E(Q, ) = X X kr i µ,s k 2 (10) i2q,s s2{l,r} where Q,l is the indices of the examples that are sent to the left node due to the decision induced by, r i is the vector of all the residuals computed for image i in the gradient boosting algorithm and µ,s = 1 Q,s X i2q,s r i, for s 2{l, r} (11) The optimal split can be found very efficiently because if one rearranges equation (10) and omits the factors not dependent on then one can see that arg min E(Q, ) = arg max X s2{l,r} Q,s µ T,s µ,s Here we only need to compute µ,l when evaluating different s, as µ,r can be calculated from the average of the targets at the parent node µ and µ,l as follows Feature selection µ,r = Q µ Q,l µ,l Q,r The decision at each node is based on thresholding the difference of intensity values at a pair of pixels. This is a rather simple test, but it is much more powerful than single intensity thresholding because of its relative insensitivity to changes in global lighting. Unfortunately, the drawback of using pixel differences is the number of potential split (feature) candidates is quadratic in the number of pixels in the mean image. This makes it difficult to find good s without searching over a very large number of them. However, this limiting factor can be eased, to some extent, by taking the structure of image data into account. We introduce an exponential prior P (u, v) / e ku vk (12) over the distance between the pixels used in a split to encourage closer pixel pairs to be chosen. We found using this simple prior reduces the prediction error on a number of face datasets. Figure 4 compares the features selected with and without this prior, where the size of the feature pool is fixed to 20 in both cases Handling missing labels The objective of equation (10) can be easily extended to handle the case where some of the landmarks are not labeled in some of the training images (or we have a measure of uncertainty for each landmark). Introduce variables w i,j 2 [0, 1] for each training image i and each landmark j. Setting w i,j to 0 indicates that the landmark j is not labeled in the ith image while setting it to 1 indicates that it is. Then equation (10) can be updated to E(Q, ) = X X (r i µ,s ) T W i(r i µ,s ) i2q,s s2{l,r} where W i is a diagonal matrix with the vector (w i1,w i1,w i2,w i2,...,w ip,w ip ) T on its diagonal and 0 1 µ,s X 1 X W i A W i r i, for s 2{l, r} i2q,s i2q,s (13) The gradient boosting algorithm must also be modified to account of these weight factors. This can be done simply by initializing the ensemble model with the weighted average of targets, and fitting regression trees to the weighted residuals in algorithm 1 as follows r ik = W i ( 3. Experiments S (t) i f k 1 (I i, Ŝ(t) i )) (14) Baselines: To accurately benchmark the performance of our proposed method, an ensemble of regression trees (ERT) we created two more baselines. The first is based on randomized ferns with random feature selection (EF) and the other is a more advanced version of this with correlation based feature selection (EF+CB) which is our reimplementation of [2]. All the parameters are fixed for all three approaches. EF uses a straightforward implementation of randomized ferns as the weak regressors within the ensemble and is the fastest to train. We use the same shrinkage method as suggested by [2] to regularize the ferns. EF+CB uses a correlation based feature selection method that projects the target outputs, r i s, onto a random direction, w, and chooses the pairs of features (u, v) s.t. I i (u 0 ) I i (v 0 ) has the highest sample correlation over the training data with the projected targets w T r i. Parameters: Unless specified, all the experiments are performed with the following fixed parameter settings. The number of strong regressors, r t, in the cascade is T = 10 and each r t comprises of K = 500 weak regressors g k. The depth of the trees (or ferns) used to represent g k is set to F =5. At each level of the cascade P = 400 pixel locations are sampled from the image. To train the weak regressors, we randomly sample a pair of these P pixel locations
5 (a) T =0 (b) T =1 (c) T =2 (d) T =3 (e) T =10 (f) Ground truth Figure 2. Landmark estimates at different levels of the cascade initialized with the mean shape centered at the output of a basic Viola & Jones[17] face detector. After the first level of the cascade, the error is already greatly reduced. according to our prior and choose a random threshold to create a potential split as described in equation (9). The best split is then found by repeating this process S = 20 times, and choosing the one that optimizes our objective. To create the training data to learn our model we use R = 20 different initializations for each training example. Performance: The runtime complexity of the algorithm on a single image is constant O(TKF). The complexity of the training time depends linearly on the number of training data O(NDTKFS) where N is the number of training data and D is dimension of the targets. In practice with a single CPU our algorithm takes about an hour to train on the HELEN[12] dataset and at runtime it only takes about one millisecond per image. Database: Most of the experimental results reported are for the HELEN[12] face database which we found to be the most challenging publicly available dataset. It consists of a total of 2330 images, each of which is annotated with 194 landmarks. As suggested by the authors we use 2000 images for training data and the rest for testing. We also report final results on the popular LFPW[1] database which consists of 1432 images. Unfortunately, we could only download 778 training images and 216 valid test images which makes our results not directly comparable to those previously reported on this dataset. Comparison: Table 1 is a summary of our results compared to previous algorithms. In addition to our baselines, we have also compared our results with two variations of Active Shape Models, STASM[14] and CompASM[12]. [14] [12] EF EF+CB EF+CB (5) EF+CB (10) ERT Error Table 1. A summary of the results of different algorithms on the HELEN dataset. The error is the average normalized distance of each landmark to its ground truth position. The distances are normalized by dividing by the interocular distance. The number within the bracket represents the number of times the regression algorithm was run with a random initialization. If no number is displayed then the method was initialized with the mean shape. In the case of multiple estimations the median of the estimates was chosen as the final estimate for the landmark. The ensemble of regression trees described in this paper significantly improves the results over the ensemble of ferns. Figure 3 shows the average error at different levels of the cascade which shows that ERT can reduce the error much faster than other baselines. Note that we have also provided the results of running EF+CB multiple times and taking the median of final predictions. The results show that similar error rate to EF+CB can be achieved by our method with an order of magnitude less computation. We have also provided results for the widely used LFPW[1] dataset (Table 2). With our EF+CB baseline we could not replicate the numbers reported by [2]. (This could be due to the fact that we could not obtain the whole dataset.) Nevertheless our method surpasses most of the previously reported results on this dataset taking only a fraction of the computational time needed by any other method. [1] [2] EF EF+CB EF+CB (5) EF+CB (10) ERT Error Table 2. A comparison of the different methods when applied to the LFPW dataset. Please see the caption for table 1 for an explanation of the numbers. Feature Selection: Table 4 shows the effect of using equation (12) as a prior on the distance between pixels used in a split instead of a uniform prior on the final results. The parameter determines the effective maximum distance between the two pixels in our features and was set to 0.1 in our experiments. Selecting this parameter by cross validation when learning each strong regressor, r t, in the cascade could potentially lead to a more significant improvement. Figure 4 is a visualization of the selected pairs of features when the different priors are used. Uniform Exponential Error Table 3. The effect of using different priors for feature selection on the final average error. An exponential prior is applied on the Euclidean distance between the two pixels defining a feature, see equation (12). Regularization: When using the gradient boosting algorithm one needs to be careful to avoid overfitting. To obtain lower test errors it is necessary to perform some form of regularization. The simplest approach is shrinkage. This
6 EF EF+CB EF+CB (5) EF+CB (10) ERT EF EF+CB EF+CB (5) EF+CB (10) ERT Average error Average error Cascade level Cascade level (a) HELEN (b) LFPW Figure 3. A comparison of different methods on HELEN(a) and LFPW(b) dataset. EF is the ensemble of randomized ferns and EF+CB is the ensemble of ferns with correlation based feature selection initialized with the mean shape. We also provide the results of taking the median of results of various initializations (5 and 10) as suggested by [2]. The results show that the proposed ensemble of regression trees (ERT) initialized with only the mean shape consistently outperforms the ensemble of ferns baseline and it can reach the same error rate with much less computation. (a) Uniform prior (b) Exponential prior Figure 4. Different features are selected if different priors are used. The exponential prior biases the selection towards pairs of pixels which are closer together. involves setting the learning rate in the gradient boosting algorithm to less than 1 (Here we set =0.1). Regularization can also be achieved by averaging the predictions of multiple regression trees. This way, g k correspond to a random forest as opposed to one tree and we set =1. Therefore, at each iteration of the gradient boosting algorithm instead of fitting one regression tree to the residuals, we fit multiple trees (10 in our experiments) and average the results. (The total number of trees is fixed in all the cases.) In terms of the bias and variance trade off, the gradient boosting algorithm always decreases the bias but increases the variance. But regularizing by shrinkage or averaging effectively reduces the variance by learning multiple overlapping models. Unregularized Shrinkage Averaging Error Table 4. A comparison of the results on the HELEN dataset when different forms of regularization are applied. We found similar results when using either shrinkage or averaging given the same total number of trees in the ensemble. We achieved similar results using the averaging regularization compared to the more standard shrinkage method. However, regularization by averaging has the advantage of being more scalable, as it enables parallelization during training time which is especially important for solving large scale problems. Cascade: At each level of the cascade the second level regressors can only observe a fixed and sparse subset of the shape indexed features. Indexing the features based on the current estimate is a crude way of warping the image with a small cost. Table 5 shows the final error rate with and without using the cascade. We found significant improvement by using this iterative mechanism which is in line with previously reported results [8, 2] (For a fair comparison here we fixed the total number of observed features to points.) # Trees Error Table 5. The above results show the importance of using a cascade of regressors as opposed to a single level ensemble. Training Data: To test the performance of our method with respect to the number of training images, we trained different models from differently sized subsets of the training data. Table 6 summarizes the final results and figure 5 is a plot of the error at each level of the cascade. Using many levels of regressors is most useful when we have a large number of training examples. We repeated the same experiments with the total number of augmented examples fixed but varied the combination of initial shapes used to generate a training example from one labelled face example and the number of annotated images used to learn the cascade (Table 7). Augmenting the training data using different initial
7 # Examples Error Table 6. Final error rate with respect to the number of training examples. When creating training data for learning the cascade regressors each labelled face image generated 20 training examples by using 20 different labelled faces as the initial guess for the face s shape. Average error Cascade level Figure 5. The average error at each level of the cascade is plotted with respect to number of training examples used. Using many levels of regressors is most useful when the number of training examples is large. # Examples # Initial Shapes Error Table 7. Here the effective number of training examples is fixed but we use different combinations of the number of training images and the number of initial shapes used for each labelled face image. shapes expands the dataset in terms of shape. Our results show this type of augmentation does not fully compensate for a lack of annotated training images. Though the rate of improvement gained by increasing the number of training images quickly slows after the first few hundred images. Partial annotations: Table 8 shows the results of using partially annotated data. 200 training examples are fully annotated and the rest are only partially annotated. # Examples (25%) (50%) 2000 Error Table 8. Results of using partially labelled data. 200 examples are always fully annotated. The values inside the parenthesis show the percentage of landmarks observed. The results show that we can gain substantial improvement by using partially labelled data. Yet the improvement displayed may not be saturated because we know that the underlying dimension of the shape parameters are much lower than the dimension of the landmarks (194 2). There is, therefore, potential for a more significant improvement with partial labels by taking explicit advantage of the correlation between the position of landmarks. Note that the gradient boosting procedure described in this paper does not take advantage of the correlation between landmarks. This issue could be addressed in a future work. 4. Conclusion We described how an ensemble of regression trees can be used to regress the location of facial landmarks from a sparse subset of intensity values extracted from an input image. The presented framework is faster in reducing the error compared to previous work and can also handle partial or uncertain labels. While major components of our algorithm treat different target dimensions as independent variables, a natural extension of this work would be to take advantage of the correlation of shape parameters for more efficient training and a better use of partial labels. Acknowledgements: This work has been funded by the Swedish Foundation for Strategic Research within the project VINST. References [1] P. N. Belhumeur, D. W. Jacobs, D. J. Kriegman, and N. Kumar. Localizing parts of faces using a consensus of exemplars. In CVPR, pages , , 5 [2] X. Cao, Y. Wei, F. Wen, and J. Sun. Face alignment by explicit shape regression. In CVPR, pages , , 2, 3, 4, 5, 6 [3] T. F. Cootes, M. Ionita, C. Lindner, and P. Sauer. Robust and accurate shape model fitting using random forest regression voting. In ECCV, [4] T. F. Cootes, C. J. Taylor, D. H. Cooper, and J. Graham. Active shape models-their training and application. Computer Vision and Image Understanding, 61(1):38 59, , 2 [5] D. Cristinacce and T. F. Cootes. Boosted regression active shape models. In BMVC, pages , [6] M. Dantone, J. Gall, G. Fanelli, and L. V. Gool. Real-time facial feature detection using conditional regression forests. In CVPR, [7] L. Ding and A. M. Martínez. Precise detailed detection of faces and facial features. In CVPR, [8] P. Dollár, P. Welinder, and P. Perona. Cascaded pose regression. In CVPR, pages , , 2, 6 [9] G. J. Edwards, T. F. Cootes, and C. J. Taylor. Advances in active appearance models. In ICCV, pages , , 2 [10] T. Hastie, R. Tibshirani, and J. H. Friedman. The elements of statistical learning: data mining, inference, and prediction. New York: Springer-Verlag, , 3 [11] V. Kazemi and J. Sullivan. Face alignment with part-based modeling. In BMVC, pages , [12] V. Le, J. Brandt, Z. Lin, L. D. Bourdev, and T. S. Huang. Interactive facial feature localization. In ECCV, pages , [13] L. Liang, R. Xiao, F. Wen, and J. Sun. Face alignment via component-based discriminative search. In ECCV, pages 72 85,


![[14] S.](/docs-images/81/83679434/images/8-2.jpg "Milborrow and")





![5 [15] J.](/docs-images/81/83679434/images/8-8.jpg "Saragih, S.")
















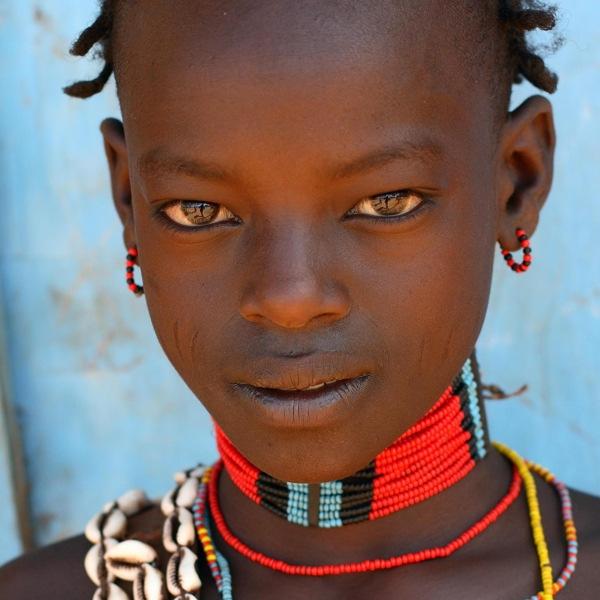



8 Figure 6. Final results on the HELEN database. [14] S. Milborrow and F. Nicolls. Locating facial features with an extended active shape model. In ECCV, pages , [15] J. Saragih, S. Lucey, and J. Cohn. Deformable model fitting by regularized landmark mean-shifts. Internation Journal of Computer Vision, 91: , [16] B. M. Smith and L. Zhang. Joint face alignment with nonparametric shape models. In ECCV, pages 43 56, [17] P. A. Viola and M. J. Jones. Robust real-time face detection. In ICCV, page 747, [18] X. Zhao, X. Chai, and S. Shan. Joint face alignment: Rescue bad alignments with good ones by regularized re-fitting. In ECCV, [19] X. Zhu and D. Ramanan. Face detection, pose estimation, and landmark localization in the wild. In CVPR, pages ,
Locating Facial Landmarks Using Probabilistic Random Forest
 2324 IEEE SIGNAL PROCESSING LETTERS, VOL. 22, NO. 12, DECEMBER 2015 Locating Facial Landmarks Using Probabilistic Random Forest Changwei Luo, Zengfu Wang, Shaobiao Wang, Juyong Zhang, and Jun Yu Abstract
2324 IEEE SIGNAL PROCESSING LETTERS, VOL. 22, NO. 12, DECEMBER 2015 Locating Facial Landmarks Using Probabilistic Random Forest Changwei Luo, Zengfu Wang, Shaobiao Wang, Juyong Zhang, and Jun Yu Abstract
FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE. Chubu University 1200, Matsumoto-cho, Kasugai, AICHI
 FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE Masatoshi Kimura Takayoshi Yamashita Yu Yamauchi Hironobu Fuyoshi* Chubu University 1200, Matsumoto-cho,
FACIAL POINT DETECTION BASED ON A CONVOLUTIONAL NEURAL NETWORK WITH OPTIMAL MINI-BATCH PROCEDURE Masatoshi Kimura Takayoshi Yamashita Yu Yamauchi Hironobu Fuyoshi* Chubu University 1200, Matsumoto-cho,
arxiv: v1 [cs.cv] 16 Nov 2015
![arxiv: v1 [cs.cv] 16 Nov 2015](/thumbs/85/92600288.jpg "arxiv: v1 [cs.cv] 16 Nov 2015") Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Coarse-to-fine Face Alignment with Multi-Scale Local Patch Regression Zhiao Huang hza@megvii.com Erjin Zhou zej@megvii.com Zhimin Cao czm@megvii.com arxiv:1511.04901v1 [cs.cv] 16 Nov 2015 Abstract Facial
Robust Facial Landmark Detection under Significant Head Poses and Occlusion
 Robust Facial Landmark Detection under Significant Head Poses and Occlusion Yue Wu Qiang Ji ECSE Department, Rensselaer Polytechnic Institute 110 8th street, Troy, NY, USA {wuy9,jiq}@rpi.edu Abstract There
Robust Facial Landmark Detection under Significant Head Poses and Occlusion Yue Wu Qiang Ji ECSE Department, Rensselaer Polytechnic Institute 110 8th street, Troy, NY, USA {wuy9,jiq}@rpi.edu Abstract There
Intensity-Depth Face Alignment Using Cascade Shape Regression
 Intensity-Depth Face Alignment Using Cascade Shape Regression Yang Cao 1 and Bao-Liang Lu 1,2 1 Center for Brain-like Computing and Machine Intelligence Department of Computer Science and Engineering Shanghai
Intensity-Depth Face Alignment Using Cascade Shape Regression Yang Cao 1 and Bao-Liang Lu 1,2 1 Center for Brain-like Computing and Machine Intelligence Department of Computer Science and Engineering Shanghai
FACIAL POINT DETECTION USING CONVOLUTIONAL NEURAL NETWORK TRANSFERRED FROM A HETEROGENEOUS TASK
 FACIAL POINT DETECTION USING CONVOLUTIONAL NEURAL NETWORK TRANSFERRED FROM A HETEROGENEOUS TASK Takayoshi Yamashita* Taro Watasue** Yuji Yamauchi* Hironobu Fujiyoshi* *Chubu University, **Tome R&D 1200,
FACIAL POINT DETECTION USING CONVOLUTIONAL NEURAL NETWORK TRANSFERRED FROM A HETEROGENEOUS TASK Takayoshi Yamashita* Taro Watasue** Yuji Yamauchi* Hironobu Fujiyoshi* *Chubu University, **Tome R&D 1200,
Nonlinear Hierarchical Part-Based Regression for Unconstrained Face Alignment
 Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence (IJCAI-6) Nonlinear Hierarchical Part-Based Regression for Unconstrained Face Alignment Xiang Yu, Zhe Lin, Shaoting
Proceedings of the Twenty-Fifth International Joint Conference on Artificial Intelligence (IJCAI-6) Nonlinear Hierarchical Part-Based Regression for Unconstrained Face Alignment Xiang Yu, Zhe Lin, Shaoting
Learn to Combine Multiple Hypotheses for Accurate Face Alignment
 2013 IEEE International Conference on Computer Vision Workshops Learn to Combine Multiple Hypotheses for Accurate Face Alignment Junjie Yan Zhen Lei Dong Yi Stan Z. Li Center for Biometrics and Security
2013 IEEE International Conference on Computer Vision Workshops Learn to Combine Multiple Hypotheses for Accurate Face Alignment Junjie Yan Zhen Lei Dong Yi Stan Z. Li Center for Biometrics and Security
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Face Alignment with Part-Based Modeling
 KAZEMI, SULLIVAN: FACE ALIGNMENT WITH PART-BASED MODELING 1 Face Alignment with Part-Based Modeling Vahid Kazemi vahidk@nada.kth.se Josephine Sullivan sullivan@nada.kth.se CVAP KTH Institute of Technology
KAZEMI, SULLIVAN: FACE ALIGNMENT WITH PART-BASED MODELING 1 Face Alignment with Part-Based Modeling Vahid Kazemi vahidk@nada.kth.se Josephine Sullivan sullivan@nada.kth.se CVAP KTH Institute of Technology
Cascaded Regression with Sparsified Feature Covariance Matrix for Facial Landmark Detection
 1 Pattern Recognition Letters journal homepage: www.elsevier.com Cascaded Regression with Sparsified Feature Covariance Matrix for Facial Landmark Detection Enrique Sánchez-Lozano, Brais Martinez, Michel
1 Pattern Recognition Letters journal homepage: www.elsevier.com Cascaded Regression with Sparsified Feature Covariance Matrix for Facial Landmark Detection Enrique Sánchez-Lozano, Brais Martinez, Michel
Extended Supervised Descent Method for Robust Face Alignment
 Extended Supervised Descent Method for Robust Face Alignment Liu Liu, Jiani Hu, Shuo Zhang, Weihong Deng Beijing University of Posts and Telecommunications, Beijing, China Abstract. Supervised Descent
Extended Supervised Descent Method for Robust Face Alignment Liu Liu, Jiani Hu, Shuo Zhang, Weihong Deng Beijing University of Posts and Telecommunications, Beijing, China Abstract. Supervised Descent
Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling
 [DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
[DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
Extending Explicit Shape Regression with Mixed Feature Channels and Pose Priors
 Extending Explicit Shape Regression with Mixed Feature Channels and Pose Priors Matthias Richter Karlsruhe Institute of Technology (KIT) Karlsruhe, Germany matthias.richter@kit.edu Hua Gao École Polytechnique
Extending Explicit Shape Regression with Mixed Feature Channels and Pose Priors Matthias Richter Karlsruhe Institute of Technology (KIT) Karlsruhe, Germany matthias.richter@kit.edu Hua Gao École Polytechnique
Occluded Facial Expression Tracking
 Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Occluded Facial Expression Tracking Hugo Mercier 1, Julien Peyras 2, and Patrice Dalle 1 1 Institut de Recherche en Informatique de Toulouse 118, route de Narbonne, F-31062 Toulouse Cedex 9 2 Dipartimento
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Robust face landmark estimation under occlusion
 2013 IEEE International Conference on Computer Vision Robust face landmark estimation under occlusion Xavier P. Burgos-Artizzu Pietro Perona Piotr Dollár California Institute of Technology Microsoft Research,
2013 IEEE International Conference on Computer Vision Robust face landmark estimation under occlusion Xavier P. Burgos-Artizzu Pietro Perona Piotr Dollár California Institute of Technology Microsoft Research,
OVer the last few years, cascaded-regression (CR) based
 based") 1 Random Cascaded-Regression Copse for Robust Facial Landmark Detection Zhen-Hua Feng 1,2, Student Member, IEEE, Patrik Huber 2, Josef Kittler 2, Life Member, IEEE, William Christmas 2, and Xiao-Jun Wu
1 Random Cascaded-Regression Copse for Robust Facial Landmark Detection Zhen-Hua Feng 1,2, Student Member, IEEE, Patrik Huber 2, Josef Kittler 2, Life Member, IEEE, William Christmas 2, and Xiao-Jun Wu
Joint Estimation of Pose and Face Landmark
 Joint Estimation of Pose and Face Landmark Donghoon Lee (B), Junyoung Chung, and Chang D. Yoo Department of Electrical Engineering, KAIST, Daejeon, Korea iamdh@kaist.ac.kr Abstract. This paper proposes
Joint Estimation of Pose and Face Landmark Donghoon Lee (B), Junyoung Chung, and Chang D. Yoo Department of Electrical Engineering, KAIST, Daejeon, Korea iamdh@kaist.ac.kr Abstract. This paper proposes
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Project-Out Cascaded Regression with an application to Face Alignment
 Project-Out Cascaded Regression with an application to Face Alignment Georgios Tzimiropoulos School of Computer Science University of Nottingham, U.K. yorgos.tzimiropoulos@nottingham.ac.uk Abstract Cascaded
Project-Out Cascaded Regression with an application to Face Alignment Georgios Tzimiropoulos School of Computer Science University of Nottingham, U.K. yorgos.tzimiropoulos@nottingham.ac.uk Abstract Cascaded
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Face Alignment Refinement
 Face Alignment Refinement Andy Zeng Vishnu Naresh Boddeti Kris M. Kitani Robotics Institute, Carnegie Mellon University andyzeng@berkeley.edu naresh@cmu.edu Takeo Kanade {kkitani,tk}@cs.cmu.edu Abstract
Face Alignment Refinement Andy Zeng Vishnu Naresh Boddeti Kris M. Kitani Robotics Institute, Carnegie Mellon University andyzeng@berkeley.edu naresh@cmu.edu Takeo Kanade {kkitani,tk}@cs.cmu.edu Abstract
Image Coding with Active Appearance Models
 Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Image Coding with Active Appearance Models Simon Baker, Iain Matthews, and Jeff Schneider CMU-RI-TR-03-13 The Robotics Institute Carnegie Mellon University Abstract Image coding is the task of representing
Extensive Facial Landmark Localization with Coarse-to-fine Convolutional Network Cascade
 2013 IEEE International Conference on Computer Vision Workshops Extensive Facial Landmark Localization with Coarse-to-fine Convolutional Network Cascade Erjin Zhou Haoqiang Fan Zhimin Cao Yuning Jiang
2013 IEEE International Conference on Computer Vision Workshops Extensive Facial Landmark Localization with Coarse-to-fine Convolutional Network Cascade Erjin Zhou Haoqiang Fan Zhimin Cao Yuning Jiang
Face detection and recognition. Many slides adapted from K. Grauman and D. Lowe
 Face detection and recognition Many slides adapted from K. Grauman and D. Lowe Face detection and recognition Detection Recognition Sally History Early face recognition systems: based on features and distances
Face detection and recognition Many slides adapted from K. Grauman and D. Lowe Face detection and recognition Detection Recognition Sally History Early face recognition systems: based on features and distances
Face Detection and Alignment. Prof. Xin Yang HUST
 Face Detection and Alignment Prof. Xin Yang HUST Applications Virtual Makeup Applications Virtual Makeup Applications Video Editing Active Shape Models Suppose we have a statistical shape model Trained
Face Detection and Alignment Prof. Xin Yang HUST Applications Virtual Makeup Applications Virtual Makeup Applications Video Editing Active Shape Models Suppose we have a statistical shape model Trained
Robust FEC-CNN: A High Accuracy Facial Landmark Detection System
 Robust FEC-CNN: A High Accuracy Facial Landmark Detection System Zhenliang He 1,2 Jie Zhang 1,2 Meina Kan 1,3 Shiguang Shan 1,3 Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Robust FEC-CNN: A High Accuracy Facial Landmark Detection System Zhenliang He 1,2 Jie Zhang 1,2 Meina Kan 1,3 Shiguang Shan 1,3 Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Eye Detection by Haar wavelets and cascaded Support Vector Machine
 Eye Detection by Haar wavelets and cascaded Support Vector Machine Vishal Agrawal B.Tech 4th Year Guide: Simant Dubey / Amitabha Mukherjee Dept of Computer Science and Engineering IIT Kanpur - 208 016
Eye Detection by Haar wavelets and cascaded Support Vector Machine Vishal Agrawal B.Tech 4th Year Guide: Simant Dubey / Amitabha Mukherjee Dept of Computer Science and Engineering IIT Kanpur - 208 016
Facial Landmark Detection via Progressive Initialization
 Facial Landmark Detection via Progressive Initialization Shengtao Xiao Shuicheng Yan Ashraf A. Kassim Department of Electrical and Computer Engineering, National University of Singapore Singapore 117576
Facial Landmark Detection via Progressive Initialization Shengtao Xiao Shuicheng Yan Ashraf A. Kassim Department of Electrical and Computer Engineering, National University of Singapore Singapore 117576
Topic-aware Deep Auto-encoders (TDA) for Face Alignment
 for Face Alignment") Topic-aware Deep Auto-encoders (TDA) for Face Alignment Jie Zhang 1,2, Meina Kan 1, Shiguang Shan 1, Xiaowei Zhao 3, and Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Topic-aware Deep Auto-encoders (TDA) for Face Alignment Jie Zhang 1,2, Meina Kan 1, Shiguang Shan 1, Xiaowei Zhao 3, and Xilin Chen 1 1 Key Lab of Intelligent Information Processing of Chinese Academy
Generic Object Class Detection using Feature Maps
 Generic Object Class Detection using Feature Maps Oscar Danielsson and Stefan Carlsson CVAP/CSC, KTH, Teknikringen 4, S- 44 Stockholm, Sweden {osda2,stefanc}@csc.kth.se Abstract. In this paper we describe
Generic Object Class Detection using Feature Maps Oscar Danielsson and Stefan Carlsson CVAP/CSC, KTH, Teknikringen 4, S- 44 Stockholm, Sweden {osda2,stefanc}@csc.kth.se Abstract. In this paper we describe
Localizing Facial Keypoints with Global Descriptor Search, Neighbour Alignment and Locally Linear Models
 2013 IEEE International Conference on Computer Vision Workshops Localizing Facial Keypoints with Global Descriptor Search, Neighbour Alignment and Locally Linear Models Md. Kamrul Hasan 1, Christopher
2013 IEEE International Conference on Computer Vision Workshops Localizing Facial Keypoints with Global Descriptor Search, Neighbour Alignment and Locally Linear Models Md. Kamrul Hasan 1, Christopher
Learning to Recognize Faces in Realistic Conditions
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
Integral Channel Features with Random Forest for 3D Facial Landmark Detection
 MSc Artificial Intelligence Track: Computer Vision Master Thesis Integral Channel Features with Random Forest for 3D Facial Landmark Detection by Arif Qodari 10711996 February 2016 42 EC Supervisor/Examiner:
MSc Artificial Intelligence Track: Computer Vision Master Thesis Integral Channel Features with Random Forest for 3D Facial Landmark Detection by Arif Qodari 10711996 February 2016 42 EC Supervisor/Examiner:
Image Resizing Based on Gradient Vector Flow Analysis
 Image Resizing Based on Gradient Vector Flow Analysis Sebastiano Battiato battiato@dmi.unict.it Giovanni Puglisi puglisi@dmi.unict.it Giovanni Maria Farinella gfarinellao@dmi.unict.it Daniele Ravì rav@dmi.unict.it
Image Resizing Based on Gradient Vector Flow Analysis Sebastiano Battiato battiato@dmi.unict.it Giovanni Puglisi puglisi@dmi.unict.it Giovanni Maria Farinella gfarinellao@dmi.unict.it Daniele Ravì rav@dmi.unict.it
Tweaked residual convolutional network for face alignment
 Journal of Physics: Conference Series PAPER OPEN ACCESS Tweaked residual convolutional network for face alignment To cite this article: Wenchao Du et al 2017 J. Phys.: Conf. Ser. 887 012077 Related content
Journal of Physics: Conference Series PAPER OPEN ACCESS Tweaked residual convolutional network for face alignment To cite this article: Wenchao Du et al 2017 J. Phys.: Conf. Ser. 887 012077 Related content
Subject-Oriented Image Classification based on Face Detection and Recognition
 000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
000 001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050
THE ability to accurately detect feature points of
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE Robust and Accurate Shape Model Matching using Random Forest Regression-Voting Claudia Lindner*, Paul A. Bromiley, Mircea C. Ionita and Tim
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE Robust and Accurate Shape Model Matching using Random Forest Regression-Voting Claudia Lindner*, Paul A. Bromiley, Mircea C. Ionita and Tim
Optimization problems for fast AAM fitting in-the-wild
 2013 IEEE International Conference on Computer Vision Optimization problems for fast AAM fitting in-the-wild Georgios Tzimiropoulos 1. School of Computer Science University of Lincoln, U.K. 2. Department
2013 IEEE International Conference on Computer Vision Optimization problems for fast AAM fitting in-the-wild Georgios Tzimiropoulos 1. School of Computer Science University of Lincoln, U.K. 2. Department
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
A Fully End-to-End Cascaded CNN for Facial Landmark Detection
 2017 IEEE 12th International Conference on Automatic Face & Gesture Recognition A Fully End-to-End Cascaded CNN for Facial Landmark Detection Zhenliang He 1,2 Meina Kan 1,3 Jie Zhang 1,2 Xilin Chen 1 Shiguang
2017 IEEE 12th International Conference on Automatic Face & Gesture Recognition A Fully End-to-End Cascaded CNN for Facial Landmark Detection Zhenliang He 1,2 Meina Kan 1,3 Jie Zhang 1,2 Xilin Chen 1 Shiguang
arxiv: v1 [cs.cv] 11 Jun 2015
![arxiv: v1 [cs.cv] 11 Jun 2015](/thumbs/92/109137547.jpg "arxiv: v1 [cs.cv] 11 Jun 2015") Pose-Invariant 3D Face Alignment Amin Jourabloo, Xiaoming Liu Department of Computer Science and Engineering Michigan State University, East Lansing MI 48824 {jourablo, liuxm}@msu.edu arxiv:506.03799v
Pose-Invariant 3D Face Alignment Amin Jourabloo, Xiaoming Liu Department of Computer Science and Engineering Michigan State University, East Lansing MI 48824 {jourablo, liuxm}@msu.edu arxiv:506.03799v
Enhanced Active Shape Models with Global Texture Constraints for Image Analysis
 Enhanced Active Shape Models with Global Texture Constraints for Image Analysis Shiguang Shan, Wen Gao, Wei Wang, Debin Zhao, Baocai Yin Institute of Computing Technology, Chinese Academy of Sciences,
Enhanced Active Shape Models with Global Texture Constraints for Image Analysis Shiguang Shan, Wen Gao, Wei Wang, Debin Zhao, Baocai Yin Institute of Computing Technology, Chinese Academy of Sciences,
Accurate Regression Procedures for Active Appearance Models
 Accurate Regression Procedures for Active Appearance Models Patrick Sauer patrick.sauer@postgrad.man.ac.uk Tim Cootes tim.cootes@manchester.ac.uk Chris Taylor chris.taylor@manchester.ac.uk Imaging Science
Accurate Regression Procedures for Active Appearance Models Patrick Sauer patrick.sauer@postgrad.man.ac.uk Tim Cootes tim.cootes@manchester.ac.uk Chris Taylor chris.taylor@manchester.ac.uk Imaging Science
Human and Sheep Facial Landmarks Localisation by Triplet Interpolated Features
 Human and Sheep Facial Landmarks Localisation by Triplet Interpolated Features Heng Yang*, Renqiao Zhang* and Peter Robinson University of Cambridge {hy36,rz264, pr1}@cam.ac.uk Abstract In this paper we
Human and Sheep Facial Landmarks Localisation by Triplet Interpolated Features Heng Yang*, Renqiao Zhang* and Peter Robinson University of Cambridge {hy36,rz264, pr1}@cam.ac.uk Abstract In this paper we
Computer Vision Group Prof. Daniel Cremers. 6. Boosting
 Prof. Daniel Cremers 6. Boosting Repetition: Regression We start with a set of basis functions (x) =( 0 (x), 1(x),..., M 1(x)) x 2 í d The goal is to fit a model into the data y(x, w) =w T (x) To do this,
Prof. Daniel Cremers 6. Boosting Repetition: Regression We start with a set of basis functions (x) =( 0 (x), 1(x),..., M 1(x)) x 2 í d The goal is to fit a model into the data y(x, w) =w T (x) To do this,
Unified Face Analysis by Iterative Multi-Output Random Forests
 Unified Face Analysis by Iterative Multi-Output Random Forests Xiaowei Zhao Tae-Kyun Kim Wenhan Luo Department of EEE, Imperial College London, United Kingdom {x.zhao,tk.kim,w.luo12}@imperial.ac.uk Abstract
Unified Face Analysis by Iterative Multi-Output Random Forests Xiaowei Zhao Tae-Kyun Kim Wenhan Luo Department of EEE, Imperial College London, United Kingdom {x.zhao,tk.kim,w.luo12}@imperial.ac.uk Abstract
Sparse Shape Registration for Occluded Facial Feature Localization
 Shape Registration for Occluded Facial Feature Localization Fei Yang, Junzhou Huang and Dimitris Metaxas Abstract This paper proposes a sparsity driven shape registration method for occluded facial feature
Shape Registration for Occluded Facial Feature Localization Fei Yang, Junzhou Huang and Dimitris Metaxas Abstract This paper proposes a sparsity driven shape registration method for occluded facial feature
Facial Expression Analysis
 Facial Expression Analysis Jeff Cohn Fernando De la Torre Human Sensing Laboratory Tutorial Looking @ People June 2012 Facial Expression Analysis F. De la Torre/J. Cohn Looking @ People (CVPR-12) 1 Outline
Facial Expression Analysis Jeff Cohn Fernando De la Torre Human Sensing Laboratory Tutorial Looking @ People June 2012 Facial Expression Analysis F. De la Torre/J. Cohn Looking @ People (CVPR-12) 1 Outline
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
Active Wavelet Networks for Face Alignment
 Active Wavelet Networks for Face Alignment Changbo Hu, Rogerio Feris, Matthew Turk Dept. Computer Science, University of California, Santa Barbara {cbhu,rferis,mturk}@cs.ucsb.edu Abstract The active appearance
Active Wavelet Networks for Face Alignment Changbo Hu, Rogerio Feris, Matthew Turk Dept. Computer Science, University of California, Santa Barbara {cbhu,rferis,mturk}@cs.ucsb.edu Abstract The active appearance
arxiv: v1 [cs.cv] 2 May 2016
![arxiv: v1 [cs.cv] 2 May 2016](/thumbs/86/93079061.jpg "arxiv: v1 [cs.cv] 2 May 2016") 16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
16-811 Math Fundamentals for Robotics Comparison of Optimization Methods in Optical Flow Estimation Final Report, Fall 2015 arxiv:1605.00572v1 [cs.cv] 2 May 2016 Contents Noranart Vesdapunt Master of Computer
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601
 with Facial KeyPoints using Spatial Fusion Convolutional Network. Nathan Sun CIS601") Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
Disguised Face Identification (DFI) with Facial KeyPoints using Spatial Fusion Convolutional Network Nathan Sun CIS601 Introduction Face ID is complicated by alterations to an individual s appearance Beard,
CS 229 Final Project - Using machine learning to enhance a collaborative filtering recommendation system for Yelp
 CS 229 Final Project - Using machine learning to enhance a collaborative filtering recommendation system for Yelp Chris Guthrie Abstract In this paper I present my investigation of machine learning as
CS 229 Final Project - Using machine learning to enhance a collaborative filtering recommendation system for Yelp Chris Guthrie Abstract In this paper I present my investigation of machine learning as
Computer Vision Group Prof. Daniel Cremers. 8. Boosting and Bagging
 Prof. Daniel Cremers 8. Boosting and Bagging Repetition: Regression We start with a set of basis functions (x) =( 0 (x), 1(x),..., M 1(x)) x 2 í d The goal is to fit a model into the data y(x, w) =w T
Prof. Daniel Cremers 8. Boosting and Bagging Repetition: Regression We start with a set of basis functions (x) =( 0 (x), 1(x),..., M 1(x)) x 2 í d The goal is to fit a model into the data y(x, w) =w T
Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection
 Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin (University of California, Riverside) Peter van Beek & Xu Chen (SHARP Labs of America, Camas, WA) 2015/8/30
Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin (University of California, Riverside) Peter van Beek & Xu Chen (SHARP Labs of America, Camas, WA) 2015/8/30
A Comparative Evaluation of Active Appearance Model Algorithms
 A Comparative Evaluation of Active Appearance Model Algorithms T.F. Cootes, G. Edwards and C.J. Taylor Dept. Medical Biophysics, Manchester University, UK tcootes@server1.smb.man.ac.uk Abstract An Active
A Comparative Evaluation of Active Appearance Model Algorithms T.F. Cootes, G. Edwards and C.J. Taylor Dept. Medical Biophysics, Manchester University, UK tcootes@server1.smb.man.ac.uk Abstract An Active
Sieving Regression Forest Votes for Facial Feature Detection in the Wild
 23 IEEE International Conference on Computer Vision Sieving Regression Forest Votes for Facial Feature Detection in the Wild Heng Yang and Ioannis Patras Queen Mary University of London {heng.yang, i.patras}@eecs.qmul.ac.uk
23 IEEE International Conference on Computer Vision Sieving Regression Forest Votes for Facial Feature Detection in the Wild Heng Yang and Ioannis Patras Queen Mary University of London {heng.yang, i.patras}@eecs.qmul.ac.uk
Generic Active Appearance Models Revisited
 Generic Active Appearance Models Revisited Georgios Tzimiropoulos 1,2, Joan Alabort-i-Medina 1, Stefanos Zafeiriou 1, and Maja Pantic 1,3 1 Department of Computing, Imperial College London, United Kingdom
Generic Active Appearance Models Revisited Georgios Tzimiropoulos 1,2, Joan Alabort-i-Medina 1, Stefanos Zafeiriou 1, and Maja Pantic 1,3 1 Department of Computing, Imperial College London, United Kingdom
Towards Robust Cascaded Regression for Face Alignment in the Wild
 Towards Robust Cascaded Regression for Face Alignment in the Wild Chengchao Qu, Hua Gao 3 Eduardo Monari Jürgen Beyerer, Jean-Philippe Thiran 3 Vision and Fusion Laboratory (IES), Karlsruhe Institute of
Towards Robust Cascaded Regression for Face Alignment in the Wild Chengchao Qu, Hua Gao 3 Eduardo Monari Jürgen Beyerer, Jean-Philippe Thiran 3 Vision and Fusion Laboratory (IES), Karlsruhe Institute of
SUPPLEMENTARY MATERIAL FOR: ADAPTIVE CASCADED REGRESSION
 SUPPLEMENTARY MATERIAL FOR: ADAPTIVE CASCADED REGRESSION Epameinondas Antonakos,, Patrick Snape,, George Trigeorgis, Stefanos Zafeiriou, Department of Computing, Imperial College London, U.K. Center for
SUPPLEMENTARY MATERIAL FOR: ADAPTIVE CASCADED REGRESSION Epameinondas Antonakos,, Patrick Snape,, George Trigeorgis, Stefanos Zafeiriou, Department of Computing, Imperial College London, U.K. Center for
Feature Detection and Tracking with Constrained Local Models
 Feature Detection and Tracking with Constrained Local Models David Cristinacce and Tim Cootes Dept. Imaging Science and Biomedical Engineering University of Manchester, Manchester, M3 9PT, U.K. david.cristinacce@manchester.ac.uk
Feature Detection and Tracking with Constrained Local Models David Cristinacce and Tim Cootes Dept. Imaging Science and Biomedical Engineering University of Manchester, Manchester, M3 9PT, U.K. david.cristinacce@manchester.ac.uk
Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild
 Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild Yuxiang Zhou Epameinondas Antonakos Joan Alabort-i-Medina Anastasios Roussos Stefanos Zafeiriou, Department of Computing,
Supplementary Material Estimating Correspondences of Deformable Objects In-the-wild Yuxiang Zhou Epameinondas Antonakos Joan Alabort-i-Medina Anastasios Roussos Stefanos Zafeiriou, Department of Computing,
4/13/ Introduction. 1. Introduction. 2. Formulation. 2. Formulation. 2. Formulation
 1. Introduction Motivation: Beijing Jiaotong University 1 Lotus Hill Research Institute University of California, Los Angeles 3 CO 3 for Ultra-fast and Accurate Interactive Image Segmentation This paper
1. Introduction Motivation: Beijing Jiaotong University 1 Lotus Hill Research Institute University of California, Los Angeles 3 CO 3 for Ultra-fast and Accurate Interactive Image Segmentation This paper
Factorization with Missing and Noisy Data
 Factorization with Missing and Noisy Data Carme Julià, Angel Sappa, Felipe Lumbreras, Joan Serrat, and Antonio López Computer Vision Center and Computer Science Department, Universitat Autònoma de Barcelona,
Factorization with Missing and Noisy Data Carme Julià, Angel Sappa, Felipe Lumbreras, Joan Serrat, and Antonio López Computer Vision Center and Computer Science Department, Universitat Autònoma de Barcelona,
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
A Hierarchical Probabilistic Model for Facial Feature Detection
 A Hierarchical Probabilistic Model for Facial Feature Detection Yue Wu Ziheng Wang Qiang Ji ECSE Department, Rensselaer Polytechnic Institute {wuy9,wangz1,jiq}@rpi.edu Abstract Facial feature detection
A Hierarchical Probabilistic Model for Facial Feature Detection Yue Wu Ziheng Wang Qiang Ji ECSE Department, Rensselaer Polytechnic Institute {wuy9,wangz1,jiq}@rpi.edu Abstract Facial feature detection
Supervised Descent Method and its Applications to Face Alignment
 23 IEEE Conference on Computer Vision and Pattern Recognition Supervised Descent Method and its Applications to Face Alignment Xuehan Xiong Fernando De la Torre The Robotics Institute, Carnegie Mellon
23 IEEE Conference on Computer Vision and Pattern Recognition Supervised Descent Method and its Applications to Face Alignment Xuehan Xiong Fernando De la Torre The Robotics Institute, Carnegie Mellon
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Automated Pivot Location for the Cartesian-Polar Hybrid Point Distribution Model
 Automated Pivot Location for the Cartesian-Polar Hybrid Point Distribution Model Tony Heap and David Hogg School of Computer Studies, University of Leeds, Leeds LS2 9JT, UK email: ajh@scs.leeds.ac.uk Abstract
Automated Pivot Location for the Cartesian-Polar Hybrid Point Distribution Model Tony Heap and David Hogg School of Computer Studies, University of Leeds, Leeds LS2 9JT, UK email: ajh@scs.leeds.ac.uk Abstract
Supervised vs. Unsupervised Learning
 Clustering Supervised vs. Unsupervised Learning So far we have assumed that the training samples used to design the classifier were labeled by their class membership (supervised learning) We assume now
Clustering Supervised vs. Unsupervised Learning So far we have assumed that the training samples used to design the classifier were labeled by their class membership (supervised learning) We assume now
Linear Methods for Regression and Shrinkage Methods
 Linear Methods for Regression and Shrinkage Methods Reference: The Elements of Statistical Learning, by T. Hastie, R. Tibshirani, J. Friedman, Springer 1 Linear Regression Models Least Squares Input vectors
Linear Methods for Regression and Shrinkage Methods Reference: The Elements of Statistical Learning, by T. Hastie, R. Tibshirani, J. Friedman, Springer 1 Linear Regression Models Least Squares Input vectors
Multiresponse Sparse Regression with Application to Multidimensional Scaling
 Multiresponse Sparse Regression with Application to Multidimensional Scaling Timo Similä and Jarkko Tikka Helsinki University of Technology, Laboratory of Computer and Information Science P.O. Box 54,
Multiresponse Sparse Regression with Application to Multidimensional Scaling Timo Similä and Jarkko Tikka Helsinki University of Technology, Laboratory of Computer and Information Science P.O. Box 54,
SIMULTANEOUS CASCADED REGRESSION. Pedro Martins, Jorge Batista. Institute of Systems and Robotics, University of Coimbra, Portugal
 SIMULTANEOUS CASCADED REGRESSION Pedro Martins, Jorge Batista Institute of Systems and Robotics, University of Coimbra, Portugal ABSTRACT This paper addresses the problem of localizing facial landmarks
SIMULTANEOUS CASCADED REGRESSION Pedro Martins, Jorge Batista Institute of Systems and Robotics, University of Coimbra, Portugal ABSTRACT This paper addresses the problem of localizing facial landmarks
Active Appearance Models
 Active Appearance Models Edwards, Taylor, and Cootes Presented by Bryan Russell Overview Overview of Appearance Models Combined Appearance Models Active Appearance Model Search Results Constrained Active
Active Appearance Models Edwards, Taylor, and Cootes Presented by Bryan Russell Overview Overview of Appearance Models Combined Appearance Models Active Appearance Model Search Results Constrained Active
Clustering. Supervised vs. Unsupervised Learning
 Clustering Supervised vs. Unsupervised Learning So far we have assumed that the training samples used to design the classifier were labeled by their class membership (supervised learning) We assume now
Clustering Supervised vs. Unsupervised Learning So far we have assumed that the training samples used to design the classifier were labeled by their class membership (supervised learning) We assume now
Locating Salient Object Features
 Locating Salient Object Features K.N.Walker, T.F.Cootes and C.J.Taylor Dept. Medical Biophysics, Manchester University, UK knw@sv1.smb.man.ac.uk Abstract We present a method for locating salient object
Locating Salient Object Features K.N.Walker, T.F.Cootes and C.J.Taylor Dept. Medical Biophysics, Manchester University, UK knw@sv1.smb.man.ac.uk Abstract We present a method for locating salient object
Face Alignment Across Large Poses: A 3D Solution
 Face Alignment Across Large Poses: A 3D Solution Outline Face Alignment Related Works 3D Morphable Model Projected Normalized Coordinate Code Network Structure 3D Image Rotation Performance on Datasets
Face Alignment Across Large Poses: A 3D Solution Outline Face Alignment Related Works 3D Morphable Model Projected Normalized Coordinate Code Network Structure 3D Image Rotation Performance on Datasets
Accurate Bone Segmentation in 2D Radiographs Using Fully Automatic Shape Model Matching Based On Regression-Voting
 Accurate Bone Segmentation in 2D Radiographs Using Fully Automatic Shape Model Matching Based On Regression-Voting C. Lindner, S. Thiagarajah 2, J.M. Wilkinson 2, arcogen Consortium, G.A. Wallis 3, and
Accurate Bone Segmentation in 2D Radiographs Using Fully Automatic Shape Model Matching Based On Regression-Voting C. Lindner, S. Thiagarajah 2, J.M. Wilkinson 2, arcogen Consortium, G.A. Wallis 3, and
Object Detection Design challenges
 Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Object Detection Design challenges How to efficiently search for likely objects Even simple models require searching hundreds of thousands of positions and scales Feature design and scoring How should
Discovery of the Source of Contaminant Release
 Discovery of the Source of Contaminant Release Devina Sanjaya 1 Henry Qin Introduction Computer ability to model contaminant release events and predict the source of release in real time is crucial in
Discovery of the Source of Contaminant Release Devina Sanjaya 1 Henry Qin Introduction Computer ability to model contaminant release events and predict the source of release in real time is crucial in
Simultaneous Facial Landmark Detection, Pose and Deformation Estimation under Facial Occlusion
 Simultaneous Facial Landmark Detection, Pose and Deformation Estimation under Facial Occlusion Yue Wu Chao Gou Qiang Ji ECSE Department Institute of Automation ECSE Department Rensselaer Polytechnic Institute
Simultaneous Facial Landmark Detection, Pose and Deformation Estimation under Facial Occlusion Yue Wu Chao Gou Qiang Ji ECSE Department Institute of Automation ECSE Department Rensselaer Polytechnic Institute
Object Category Detection: Sliding Windows
 04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
04/10/12 Object Category Detection: Sliding Windows Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical
Ordinal Random Forests for Object Detection
 Ordinal Random Forests for Object Detection Samuel Schulter, Peter M. Roth, Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {schulter,pmroth,bischof}@icg.tugraz.at
Ordinal Random Forests for Object Detection Samuel Schulter, Peter M. Roth, Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {schulter,pmroth,bischof}@icg.tugraz.at
The Template Update Problem
 The Template Update Problem Iain Matthews, Takahiro Ishikawa, and Simon Baker The Robotics Institute Carnegie Mellon University Abstract Template tracking dates back to the 1981 Lucas-Kanade algorithm.
The Template Update Problem Iain Matthews, Takahiro Ishikawa, and Simon Baker The Robotics Institute Carnegie Mellon University Abstract Template tracking dates back to the 1981 Lucas-Kanade algorithm.
Supervised Learning for Image Segmentation
 Supervised Learning for Image Segmentation Raphael Meier 06.10.2016 Raphael Meier MIA 2016 06.10.2016 1 / 52 References A. Ng, Machine Learning lecture, Stanford University. A. Criminisi, J. Shotton, E.
Supervised Learning for Image Segmentation Raphael Meier 06.10.2016 Raphael Meier MIA 2016 06.10.2016 1 / 52 References A. Ng, Machine Learning lecture, Stanford University. A. Criminisi, J. Shotton, E.
The Nottingham eprints service makes this work by researchers of the University of Nottingham available open access under the following conditions.
 Sagonas, Christos and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja (2013) 300 Faces in-the-wild Challenge: the first facial landmark localization challenge. In: 2013 IEEE International
Sagonas, Christos and Tzimiropoulos, Georgios and Zafeiriou, Stefanos and Pantic, Maja (2013) 300 Faces in-the-wild Challenge: the first facial landmark localization challenge. In: 2013 IEEE International
Note Set 4: Finite Mixture Models and the EM Algorithm
 Note Set 4: Finite Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine Finite Mixture Models A finite mixture model with K components, for
Note Set 4: Finite Mixture Models and the EM Algorithm Padhraic Smyth, Department of Computer Science University of California, Irvine Finite Mixture Models A finite mixture model with K components, for
Face Alignment Under Various Poses and Expressions
 Face Alignment Under Various Poses and Expressions Shengjun Xin and Haizhou Ai Computer Science and Technology Department, Tsinghua University, Beijing 100084, China ahz@mail.tsinghua.edu.cn Abstract.
Face Alignment Under Various Poses and Expressions Shengjun Xin and Haizhou Ai Computer Science and Technology Department, Tsinghua University, Beijing 100084, China ahz@mail.tsinghua.edu.cn Abstract.
Understanding Clustering Supervising the unsupervised
 Understanding Clustering Supervising the unsupervised Janu Verma IBM T.J. Watson Research Center, New York http://jverma.github.io/ jverma@us.ibm.com @januverma Clustering Grouping together similar data
Understanding Clustering Supervising the unsupervised Janu Verma IBM T.J. Watson Research Center, New York http://jverma.github.io/ jverma@us.ibm.com @januverma Clustering Grouping together similar data
Nearest Neighbor Predictors
 Nearest Neighbor Predictors September 2, 2018 Perhaps the simplest machine learning prediction method, from a conceptual point of view, and perhaps also the most unusual, is the nearest-neighbor method,
Nearest Neighbor Predictors September 2, 2018 Perhaps the simplest machine learning prediction method, from a conceptual point of view, and perhaps also the most unusual, is the nearest-neighbor method,
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Network Traffic Measurements and Analysis
 DEIB - Politecnico di Milano Fall, 2017 Sources Hastie, Tibshirani, Friedman: The Elements of Statistical Learning James, Witten, Hastie, Tibshirani: An Introduction to Statistical Learning Andrew Ng:
DEIB - Politecnico di Milano Fall, 2017 Sources Hastie, Tibshirani, Friedman: The Elements of Statistical Learning James, Witten, Hastie, Tibshirani: An Introduction to Statistical Learning Andrew Ng:
DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS
 DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS Sylvain Le Gallou*, Gaspard Breton*, Christophe Garcia*, Renaud Séguier** * France Telecom R&D - TECH/IRIS 4 rue du clos
DISTANCE MAPS: A ROBUST ILLUMINATION PREPROCESSING FOR ACTIVE APPEARANCE MODELS Sylvain Le Gallou*, Gaspard Breton*, Christophe Garcia*, Renaud Séguier** * France Telecom R&D - TECH/IRIS 4 rue du clos
Shape Augmented Regression for 3D Face Alignment
 Shape Augmented Regression for 3D Face Alignment Chao Gou 1,3(B),YueWu 2, Fei-Yue Wang 1,3, and Qiang Ji 2 1 Institute of Automation, Chinese Academy of Sciences, Beijing, China {gouchao2012,feiyue.wang}@ia.ac.cn
Shape Augmented Regression for 3D Face Alignment Chao Gou 1,3(B),YueWu 2, Fei-Yue Wang 1,3, and Qiang Ji 2 1 Institute of Automation, Chinese Academy of Sciences, Beijing, China {gouchao2012,feiyue.wang}@ia.ac.cn
Learning to Detect Faces. A Large-Scale Application of Machine Learning
 Learning to Detect Faces A Large-Scale Application of Machine Learning (This material is not in the text: for further information see the paper by P. Viola and M. Jones, International Journal of Computer
Learning to Detect Faces A Large-Scale Application of Machine Learning (This material is not in the text: for further information see the paper by P. Viola and M. Jones, International Journal of Computer
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model
 Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Object Detection with Partial Occlusion Based on a Deformable Parts-Based Model Johnson Hsieh (johnsonhsieh@gmail.com), Alexander Chia (alexchia@stanford.edu) Abstract -- Object occlusion presents a major
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction
 Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking