Photometric*Stereo* October*8,*2013* Dr.*Grant*Schindler* *
|
|
|
- Earl Mitchell
- 5 years ago
- Views:
Transcription
1 Photometric*Stereo* October*8,*2013* Dr.*Grant*Schindler* * schindler@gatech.edu*
2
3

4
5

6 Credit:*Alex*Powell*

7 Credit:*Alex*Powell*

8 Credit:*Alex*Powell*

9 Credit:*Alex*Powell*
10 Credit:*Alex*Powell*
11 Credit:*Alex*Powell*
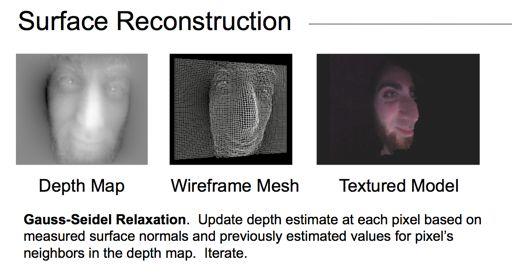
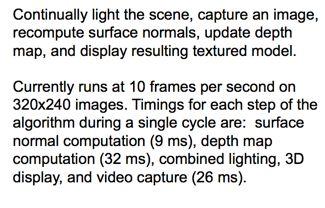
12 Froggies* Demo*
13
14 Infinitely*Distant*Light*Source*
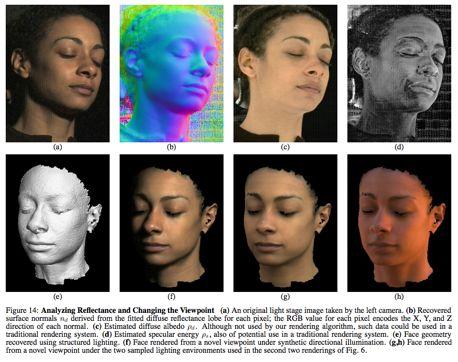
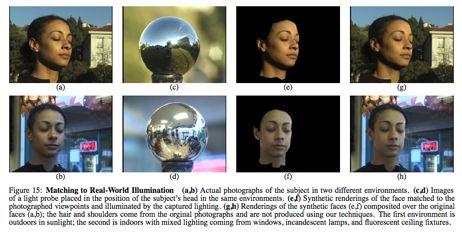
Face:)Paul)Debevec)et)al* hop://gl.ict.usc.")
15 Acquiring)the)Reflectance)Field)of)a) Human)Face:)Paul)Debevec)et)al* hop://gl.ict.usc.edu/lightstages/*
16
17
18 More*Info* hop:// hop:// hop://gl.ict.usc.edu/research/digitalemily/* hop://gl.ict.usc.edu/research/rhl/*
19 RealTTime*Photometric*Stereo* Surface*Normals* 6*ms* Height*Field* (Integrate*Surface*Normals*via*GaussTSeidel)* 32*ms*

20 RealTTime*Photometric*Stereo*
21 Processing*Demo* Demo*
22 Reading**


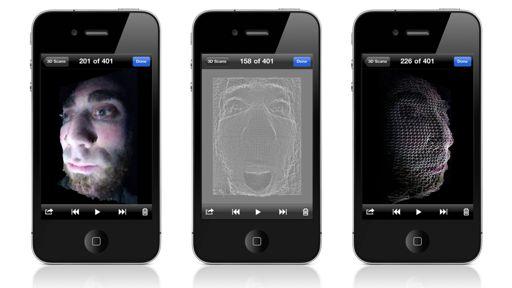
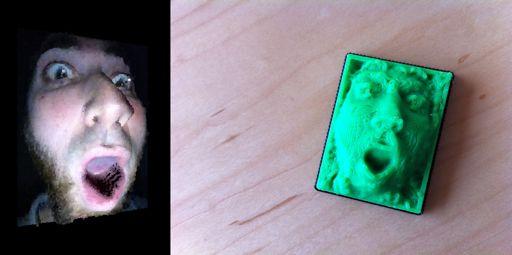
23 3D*Scanner*in*Your*Pocket*

24 How*does*it*work?* Camera*(FrontTFacing)* Reflect*Light* Emit*Light*

25 How*does*it*work?* Camera*(FrontTFacing)* Reflect*Light* Emit*Light*


26 How*does*it*work?* Camera*(FrontTFacing)* Reflect*Light* Emit*Light*
*")
27 How*does*it*work?* Camera*(FrontTFacing)* Reflect*Light* Emit*Light*

28 How*does*it*work?* 2D* 3D*
29

30

31
32
33
34
35

36
37 Lambertian Surface The intensity of a pixel I(u,v) is: I(u,v) ^ s ^ n a I(u,v) = [a(u,v) ˆ n (u,v)] [s 0 ˆ s ] = b(u,v) s a(u,v) is the albedo of the surface projecting to (u,v). n(u,v) is the direction of the surface normal. s 0 is the light source intensity. s is the direction to the light source. Slide courtesy of David Kriegman
38 Orthographic Projection Simplification for light sources that are sufficiently far away from an object. All incoming light rays are parallel. Thus, while b vectors vary over the surface, s vector is constant. s b s s b b Pixels : b 1 T s, b 2 T s, b 3 T s,... Bs
39 Images Live in a 3-D Subspace of All Possible Images Images Surface Normals Light Directions = 3 #pixels #pixels 4 4 3
40 Images Live in a 3-D Subspace of All Possible Images Images Surface Normals Light Directions = 3 #pixels #pixels 4 4 3
41 Background:*Linear*Algebra* hop:// transforms/* Related:*Image*Compression*



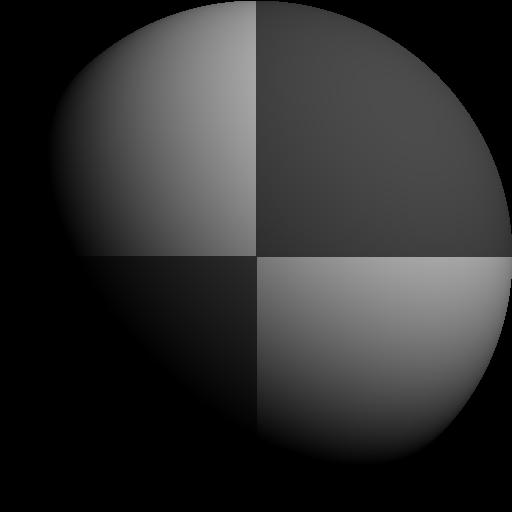
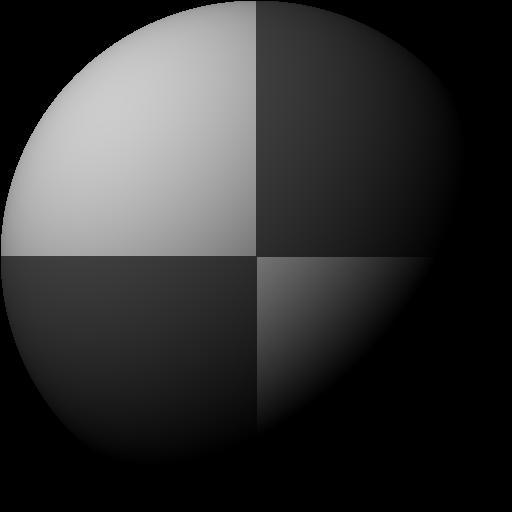
42 Synthetic Sphere Images Five different lighting conditions Slide courtesy of David Forsyth

43 Recovered Albedo Slide courtesy of David Forsyth
44 Recovered Surface Normals Slide courtesy of David Forsyth
45 Recovered Surface Shape Recovery up to a constant depth error (not absolute depth) Slide courtesy of David Forsyth
46 TFrankotTChellappa*(FFT)*


47 High Quality Results George Vogiatzis and Carlos Hernandez
48 Photometric Stereo
49 Photometric Stereo s 1 s 2 s 3 b 2 b 1 b 3 Given multiple images of the same surface under different known lighting conditions, can we recover the surface shape? Yes! (Woodham, 1978)
50 Photometric Stereo Assume: A set of point sources that are infinitely distant A set of pictures of an object, obtained in exactly the same camera/object configuration but using different sources I 1 = Bs 1 ; I 2 = Bs 2 ; I 3 = Bs 3... A Lambertian object (or the specular component has been identified and removed)
51 Stereo for a Pixel I s 1 s 2 s 3 b For a pixel (x,y) we have n measurements : I 1 (x, y) =s 1 T b(x, y); I 2 (x, y) =s 2 T b(x, y)... I(x, y) = Sb(x, y) Solve an over-constrained linear system for b (with n>3)
52 What About Shadows? Shadowed pixels (e.g. attached shadows for a given light source position) are outliers. Max trick can be adapted for this case too: " I 1 (x,y) 0 0 %" I 1 (x, y) % " I 1 (x, y) 0 0 %" T s 1 % $ ' $ ' $ ' $ ' $ 0 0 ' $ ' = $ 0 0 ' $ ' b(x, y) T # $ 0 0 I n (x,y)&' # $ I n (x, y) &' # $ 0 0 I n (x, y) &' # $ s n & ' Pre-multiplying by a thresholded weight matrix zeros the contributions from shadowed pixels
53 Recovering the Albedo Recall that b(x, y) = a(x, y)ˆ n (x,y) a(x, y) = b(x,y) This gives a check on the normal recovery at a pixel If the magnitude of a(x, y) is greater than 1, there s a problem Then ˆ n (x, y) = b(x, y) /a(x, y)
54 Recovering the Surface Shape Depth map model (also called Monge patch): Graphic courtesy of David Forsyth z = f (x, y) Surface is set of points {x, y, f (x, y)}
55 Recovering a surface from normals - 1 If we write the known vector g as " g 1 (x, y) % (x,y, f (x, y)) g(x,y) = $ g 2 (x, y) ' $ ' # g 3 (x, y) & Then we obtain values for the partial derivatives of the surface: Recall the surface is written as This means the normal has the form: N(x,y) = " $ # 1 % " f x % f 2 x + f 2 ' $ f y ' y +1& $ ' # 1 & ( ) ( ) f x (x,y) = g 1 (x, y) g 3 (x, y) f y (x, y) = g 2 (x,y) g 3 (x,y) Slide courtesy of David Forsyth
56 Recovering a surface from normals - 2 Recall that mixed second partials are equal --- this gives us a check. We must have: ( g 1 (x, y) g 3 (x, y) ) = y ( ) g 2 (x, y) g 3 (x, y) (or they x should be similar, at least) We can now recover the surface height at any point by integration along some path, e.g. f (x, y) = y 0 x f x (s, y)ds + 0 f y (x,t)dt + c Slide courtesy of David Forsyth
57 Light Sources
58 Lambertian Surface The intensity of a pixel I(u,v) is: I(u,v) ^ s ^ n a I(u,v) = [a(u,v) ˆ n (u,v)] [s 0 ˆ s ] = b(u,v) s a(u,v) is the albedo of the surface projecting to (u,v). n(u,v) is the direction of the surface normal. s 0 is the light source intensity. s is the direction to the light source. Slide courtesy of David Kriegman
59 Orthographic Projection Simplification for light sources that are sufficiently far away from an object. All incoming light rays are parallel. Thus, while b vectors vary over the surface, s vector is constant. s b s s b b Pixels : b 1 T s, b 2 T s, b 3 T s,... Bs
Photometric Stereo, Shape from Shading SfS Chapter Szelisky
 Photometric Stereo, Shape from Shading SfS Chapter 12.1.1. Szelisky Guido Gerig CS 6320, Spring 2012 Credits: M. Pollefey UNC CS256, Ohad Ben-Shahar CS BGU, Wolff JUN (http://www.cs.jhu.edu/~wolff/course600.461/week9.3/index.htm)
Photometric Stereo, Shape from Shading SfS Chapter 12.1.1. Szelisky Guido Gerig CS 6320, Spring 2012 Credits: M. Pollefey UNC CS256, Ohad Ben-Shahar CS BGU, Wolff JUN (http://www.cs.jhu.edu/~wolff/course600.461/week9.3/index.htm)
Global Illumination. Frank Dellaert Some slides by Jim Rehg, Philip Dutre
 Global Illumination Frank Dellaert Some slides by Jim Rehg, Philip Dutre Color and Radiometry What is color? What is Color? A perceptual attribute of objects and scenes constructed by the visual system
Global Illumination Frank Dellaert Some slides by Jim Rehg, Philip Dutre Color and Radiometry What is color? What is Color? A perceptual attribute of objects and scenes constructed by the visual system
Capturing light. Source: A. Efros
 Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Starting this chapter
 Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Announcements. Photometric Stereo. Shading reveals 3-D surface geometry. Photometric Stereo Rigs: One viewpoint, changing lighting
 Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
Photometric Stereo. Lighting and Photometric Stereo. Computer Vision I. Last lecture in a nutshell BRDF. CSE252A Lecture 7
 Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Photometric Stereo. Photometric Stereo. Shading reveals 3-D surface geometry BRDF. HW3 is assigned. An example of photometric stereo
 Photometric Stereo Photometric Stereo HW3 is assigned Introduction to Computer Vision CSE5 Lecture 6 Shading reveals 3-D surface geometry Shape-from-shading: Use just one image to recover shape. Requires
Photometric Stereo Photometric Stereo HW3 is assigned Introduction to Computer Vision CSE5 Lecture 6 Shading reveals 3-D surface geometry Shape-from-shading: Use just one image to recover shape. Requires
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Photometric stereo. Recovering the surface f(x,y) Three Source Photometric stereo: Step1. Reflectance Map of Lambertian Surface
 Three Source Photometric stereo: Step1. Reflectance Map of Lambertian Surface") Photometric stereo Illumination Cones and Uncalibrated Photometric Stereo Single viewpoint, multiple images under different lighting. 1. Arbitrary known BRDF, known lighting 2. Lambertian BRDF, known lighting
Photometric stereo Illumination Cones and Uncalibrated Photometric Stereo Single viewpoint, multiple images under different lighting. 1. Arbitrary known BRDF, known lighting 2. Lambertian BRDF, known lighting
Announcement. Photometric Stereo. Computer Vision I. Shading reveals 3-D surface geometry. Shape-from-X. CSE252A Lecture 8
 Announcement Photometric Stereo Lecture 8 Read Chapter 2 of Forsyth & Ponce Office hours tomorrow: 3-5, CSE 4127 5-6, CSE B260A Piazza Next lecture Shape-from-X Shading reveals 3-D surface geometry Where
Announcement Photometric Stereo Lecture 8 Read Chapter 2 of Forsyth & Ponce Office hours tomorrow: 3-5, CSE 4127 5-6, CSE B260A Piazza Next lecture Shape-from-X Shading reveals 3-D surface geometry Where
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein. Lecture 23: Photometric Stereo
 CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
Using a Raster Display Device for Photometric Stereo
 DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
Lambertian model of reflectance I: shape from shading and photometric stereo. Ronen Basri Weizmann Institute of Science
 Lambertian model of reflectance I: shape from shading and photometric stereo Ronen Basri Weizmann Institute of Science Variations due to lighting (and pose) Relief Dumitru Verdianu Flying Pregnant Woman
Lambertian model of reflectance I: shape from shading and photometric stereo Ronen Basri Weizmann Institute of Science Variations due to lighting (and pose) Relief Dumitru Verdianu Flying Pregnant Woman
Assignment #2. (Due date: 11/6/2012)
") Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Lecture 22: Basic Image Formation CAP 5415
 Lecture 22: Basic Image Formation CAP 5415 Today We've talked about the geometry of scenes and how that affects the image We haven't talked about light yet Today, we will talk about image formation and
Lecture 22: Basic Image Formation CAP 5415 Today We've talked about the geometry of scenes and how that affects the image We haven't talked about light yet Today, we will talk about image formation and
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40
 Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Faces. Face Modeling. Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 17
 Face Modeling Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 17 Faces CS291-J00, Winter 2003 From David Romdhani Kriegman, slides 2003 1 Approaches 2-D Models morphing, indexing, etc.
Face Modeling Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 17 Faces CS291-J00, Winter 2003 From David Romdhani Kriegman, slides 2003 1 Approaches 2-D Models morphing, indexing, etc.
Photometric Stereo.
 Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07. Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang
 CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
CS 4495/7495 Computer Vision Frank Dellaert, Fall 07 Dense Stereo Some Slides by Forsyth & Ponce, Jim Rehg, Sing Bing Kang Etymology Stereo comes from the Greek word for solid (στερεο), and the term can
Ligh%ng and Reflectance
 Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
HW2. October 24, CSE 252A Computer Vision I Fall Assignment 2
 HW2 October 24, 2018 1 CSE 252A Computer Vision I Fall 2018 - Assignment 2 1.0.1 Instructor: David Kriegman 1.0.2 Assignment Published On: Wednesday, October 24, 2018 1.0.3 Due On: Wednesday, November
HW2 October 24, 2018 1 CSE 252A Computer Vision I Fall 2018 - Assignment 2 1.0.1 Instructor: David Kriegman 1.0.2 Assignment Published On: Wednesday, October 24, 2018 1.0.3 Due On: Wednesday, November
Announcements. Introduction. Why is this hard? What is Computer Vision? We all make mistakes. What do you see? Class Web Page is up:
 Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
CS4670/5760: Computer Vision
 CS4670/5760: Computer Vision Kavita Bala! Lecture 28: Photometric Stereo Thanks to ScoC Wehrwein Announcements PA 3 due at 1pm on Monday PA 4 out on Monday HW 2 out on weekend Next week: MVS, sfm Last
CS4670/5760: Computer Vision Kavita Bala! Lecture 28: Photometric Stereo Thanks to ScoC Wehrwein Announcements PA 3 due at 1pm on Monday PA 4 out on Monday HW 2 out on weekend Next week: MVS, sfm Last
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Lambertian model of reflectance II: harmonic analysis. Ronen Basri Weizmann Institute of Science
 Lambertian model of reflectance II: harmonic analysis Ronen Basri Weizmann Institute of Science Illumination cone What is the set of images of an object under different lighting, with any number of sources?
Lambertian model of reflectance II: harmonic analysis Ronen Basri Weizmann Institute of Science Illumination cone What is the set of images of an object under different lighting, with any number of sources?
Announcement. Lighting and Photometric Stereo. Computer Vision I. Surface Reflectance Models. Lambertian (Diffuse) Surface.
 Surface.") Lighting and Photometric Stereo CSE252A Lecture 7 Announcement Read Chapter 2 of Forsyth & Ponce Might find section 12.1.3 of Forsyth & Ponce useful. HW Problem Emitted radiance in direction f r for incident
Lighting and Photometric Stereo CSE252A Lecture 7 Announcement Read Chapter 2 of Forsyth & Ponce Might find section 12.1.3 of Forsyth & Ponce useful. HW Problem Emitted radiance in direction f r for incident
Using a Raster Display for Photometric Stereo
 Using a Raster Display for Photometric Stereo Nathan Funk Singular Systems Edmonton, Canada nathan.funk@singularsys.com Yee-Hong Yang Computing Science University of Alberta Edmonton, Canada yang@cs.ualberta.ca
Using a Raster Display for Photometric Stereo Nathan Funk Singular Systems Edmonton, Canada nathan.funk@singularsys.com Yee-Hong Yang Computing Science University of Alberta Edmonton, Canada yang@cs.ualberta.ca
A method for improving consistency in photometric databases
 HERNÁNDEZ-RODRÍGUEZ, CASTELÁN: IMPROVING PHOTOMETRIC CONSISTENCY A method for improving consistency in photometric databases Felipe Hernández-Rodríguez felipe.hernandez@cinvestav.edu.mx Mario Castelán
HERNÁNDEZ-RODRÍGUEZ, CASTELÁN: IMPROVING PHOTOMETRIC CONSISTENCY A method for improving consistency in photometric databases Felipe Hernández-Rodríguez felipe.hernandez@cinvestav.edu.mx Mario Castelán
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 20: Shape from Shading Winter Semester 2015/16 Slides: Prof. Bernd Neumann Slightly
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 20: Shape from Shading Winter Semester 2015/16 Slides: Prof. Bernd Neumann Slightly
Practical 3d reconstruction based on Photometric Stereo
 Practical 3d reconstruction based on Photometric Stereo George Vogiatzis and Carlos Hernández Abstract Photometric Stereo is a powerful image based 3d reconstruction technique that has recently been used
Practical 3d reconstruction based on Photometric Stereo George Vogiatzis and Carlos Hernández Abstract Photometric Stereo is a powerful image based 3d reconstruction technique that has recently been used
COMP 558 lecture 16 Nov. 8, 2010
 Shading The term shading typically refers to variations in irradiance along a smooth Lambertian surface. Recall that if a surface point is illuminated by parallel light source from direction l, then the
Shading The term shading typically refers to variations in irradiance along a smooth Lambertian surface. Recall that if a surface point is illuminated by parallel light source from direction l, then the
Recovery of Fingerprints using Photometric Stereo
 Recovery of Fingerprints using Photometric Stereo G. McGunnigle and M.J. Chantler Department of Computing and Electrical Engineering Heriot Watt University Riccarton Edinburgh EH14 4AS United Kingdom gmg@cee.hw.ac.uk
Recovery of Fingerprints using Photometric Stereo G. McGunnigle and M.J. Chantler Department of Computing and Electrical Engineering Heriot Watt University Riccarton Edinburgh EH14 4AS United Kingdom gmg@cee.hw.ac.uk
3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 1 3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption Yael Moses Member, IEEE and Ilan Shimshoni Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 1 3D Shape Recovery of Smooth Surfaces: Dropping the Fixed Viewpoint Assumption Yael Moses Member, IEEE and Ilan Shimshoni Member,
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
SOURCES, SHADOWS AND SHADING
 Chapter 3 SOURCES, SHADOWS AND SHADING We shall start by describing the basic radiometric properties of various light sources. We shall then develop models of source geometries and discuss the radiosity
Chapter 3 SOURCES, SHADOWS AND SHADING We shall start by describing the basic radiometric properties of various light sources. We shall then develop models of source geometries and discuss the radiosity
Lighting affects appearance
 Lighting affects appearance 1 Image Normalization Global Histogram Equalization. Make two images have same histogram. Or, pick a standard histogram, and make adjust each image to have that histogram. Apply
Lighting affects appearance 1 Image Normalization Global Histogram Equalization. Make two images have same histogram. Or, pick a standard histogram, and make adjust each image to have that histogram. Apply
1 (5 max) 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)
 2 (10 max) 3 (20 max) 4 (30 max) 5 (10 max) 6 (15 extra max) total (75 max + 15 extra)") Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Mierm Exam CS223b Stanford CS223b Computer Vision, Winter 2004 Feb. 18, 2004 Full Name: Email: This exam has 7 pages. Make sure your exam is not missing any sheets, and write your name on every page. The
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Resolving the Generalized Bas-Relief Ambiguity by Entropy Minimization
 Resolving the Generalized Bas-Relief Ambiguity by Entropy Minimization Neil G. Alldrin Satya P. Mallick David J. Kriegman nalldrin@cs.ucsd.edu spmallick@vision.ucsd.edu kriegman@cs.ucsd.edu University
Resolving the Generalized Bas-Relief Ambiguity by Entropy Minimization Neil G. Alldrin Satya P. Mallick David J. Kriegman nalldrin@cs.ucsd.edu spmallick@vision.ucsd.edu kriegman@cs.ucsd.edu University
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Shading I Computer Graphics I, Fall 2008
 Shading I 1 Objectives Learn to shade objects ==> images appear threedimensional Introduce types of light-material interactions Build simple reflection model Phong model Can be used with real time graphics
Shading I 1 Objectives Learn to shade objects ==> images appear threedimensional Introduce types of light-material interactions Build simple reflection model Phong model Can be used with real time graphics
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION. Department of Artificial Intelligence Kyushu Institute of Technology
 DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION Kouki Takechi Takahiro Okabe Department of Artificial Intelligence Kyushu Institute of Technology ABSTRACT Separating diffuse
DIFFUSE-SPECULAR SEPARATION OF MULTI-VIEW IMAGES UNDER VARYING ILLUMINATION Kouki Takechi Takahiro Okabe Department of Artificial Intelligence Kyushu Institute of Technology ABSTRACT Separating diffuse
Volume Illumination. Visualisation Lecture 11. Taku Komura. Institute for Perception, Action & Behaviour School of Informatics
 Volume Illumination Visualisation Lecture 11 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Volume Illumination Visualisation Lecture 11 Taku Komura Institute for Perception, Action & Behaviour School of Informatics Taku Komura Volume Illumination & Vector Vis. 1 Previously : Volume Rendering
Computer Graphics. Shadows
 Computer Graphics Lecture 10 Shadows Taku Komura Today Shadows Overview Projective shadows Shadow texture Shadow volume Shadow map Soft shadows Why Shadows? Shadows tell us about the relative locations
Computer Graphics Lecture 10 Shadows Taku Komura Today Shadows Overview Projective shadows Shadow texture Shadow volume Shadow map Soft shadows Why Shadows? Shadows tell us about the relative locations
And if that 120MP Camera was cool
 Reflectance, Lights and on to photometric stereo CSE 252A Lecture 7 And if that 120MP Camera was cool Large Synoptic Survey Telescope 3.2Gigapixel camera 189 CCD s, each with 16 megapixels Pixels are 10µm
Reflectance, Lights and on to photometric stereo CSE 252A Lecture 7 And if that 120MP Camera was cool Large Synoptic Survey Telescope 3.2Gigapixel camera 189 CCD s, each with 16 megapixels Pixels are 10µm
CS6320: 3D Computer Vision Project 3 Shape from Shading
 CS6320: 3D Computer Vision Project 3 Shape from Shading Arthur Coste: coste.arthur@gmail.com March 2013 1 Contents 1 Introduction 3 2 Theoretical Problems 4 2.1 Bidirectional Reflectance Function............................
CS6320: 3D Computer Vision Project 3 Shape from Shading Arthur Coste: coste.arthur@gmail.com March 2013 1 Contents 1 Introduction 3 2 Theoretical Problems 4 2.1 Bidirectional Reflectance Function............................
Shading and Recognition OR The first Mrs Rochester. D.A. Forsyth, UIUC
 Shading and Recognition OR The first Mrs Rochester D.A. Forsyth, UIUC Structure Argument: History why shading why shading analysis died reasons for hope Classical SFS+Critiques Primitives Reconstructions
Shading and Recognition OR The first Mrs Rochester D.A. Forsyth, UIUC Structure Argument: History why shading why shading analysis died reasons for hope Classical SFS+Critiques Primitives Reconstructions
Passive 3D Photography
 SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
Pipeline Operations. CS 4620 Lecture 10
 Pipeline Operations CS 4620 Lecture 10 2008 Steve Marschner 1 Hidden surface elimination Goal is to figure out which color to make the pixels based on what s in front of what. Hidden surface elimination
Pipeline Operations CS 4620 Lecture 10 2008 Steve Marschner 1 Hidden surface elimination Goal is to figure out which color to make the pixels based on what s in front of what. Hidden surface elimination
Photometric stereo , , Computational Photography Fall 2018, Lecture 17
 Photometric stereo http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 17 Course announcements Homework 4 is still ongoing - Any questions? Feedback
Photometric stereo http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 17 Course announcements Homework 4 is still ongoing - Any questions? Feedback
High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination
 High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination Yudeog Han Joon-Young Lee In So Kweon Robotics and Computer Vision Lab., KAIST ydhan@rcv.kaist.ac.kr jylee@rcv.kaist.ac.kr
High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination Yudeog Han Joon-Young Lee In So Kweon Robotics and Computer Vision Lab., KAIST ydhan@rcv.kaist.ac.kr jylee@rcv.kaist.ac.kr
General Principles of 3D Image Analysis
 General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
Computer Graphics 10 - Shadows
 Computer Graphics 10 - Shadows Tom Thorne Slides courtesy of Taku Komura www.inf.ed.ac.uk/teaching/courses/cg Overview Shadows Overview Projective shadows Shadow textures Shadow volume Shadow map Soft
Computer Graphics 10 - Shadows Tom Thorne Slides courtesy of Taku Komura www.inf.ed.ac.uk/teaching/courses/cg Overview Shadows Overview Projective shadows Shadow textures Shadow volume Shadow map Soft
CHAPTER 9. Classification Scheme Using Modified Photometric. Stereo and 2D Spectra Comparison
 CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
Lighting affects appearance
 Lighting affects appearance 1 Source emits photons Light And then some reach the eye/camera. Photons travel in a straight line When they hit an object they: bounce off in a new direction or are absorbed
Lighting affects appearance 1 Source emits photons Light And then some reach the eye/camera. Photons travel in a straight line When they hit an object they: bounce off in a new direction or are absorbed
Interreflection Removal for Photometric Stereo by Using Spectrum-dependent Albedo
 Interreflection Removal for Photometric Stereo by Using Spectrum-dependent Albedo Miao Liao 1, Xinyu Huang, and Ruigang Yang 1 1 Department of Computer Science, University of Kentucky Department of Mathematics
Interreflection Removal for Photometric Stereo by Using Spectrum-dependent Albedo Miao Liao 1, Xinyu Huang, and Ruigang Yang 1 1 Department of Computer Science, University of Kentucky Department of Mathematics
Pipeline Operations. CS 4620 Lecture Steve Marschner. Cornell CS4620 Spring 2018 Lecture 11
 Pipeline Operations CS 4620 Lecture 11 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives to pixels RASTERIZATION
Pipeline Operations CS 4620 Lecture 11 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives to pixels RASTERIZATION
CS201 Computer Vision Lect 4 - Image Formation
 CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
CS201 Computer Vision Lect 4 - Image Formation John Magee 9 September, 2014 Slides courtesy of Diane H. Theriault Question of the Day: Why is Computer Vision hard? Something to think about from our view
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
Image-based BRDF Acquisition for Non-spherical Objects
 Image-based BRDF Acquisition for Non-spherical Objects Tsung-Yi Wu Wan-Chun Ma Yung-Yu Chuang Bing-Yu Chen Ming Ouhyoung National Taiwan University (a) (b) (c) (d) Figure 1: An overview of image-based
Image-based BRDF Acquisition for Non-spherical Objects Tsung-Yi Wu Wan-Chun Ma Yung-Yu Chuang Bing-Yu Chen Ming Ouhyoung National Taiwan University (a) (b) (c) (d) Figure 1: An overview of image-based
Lighting affects appearance
 Lighting affects appearance 1 Source emits photons Light And then some reach the eye/camera. Photons travel in a straight line When they hit an object they: bounce off in a new direction or are absorbed
Lighting affects appearance 1 Source emits photons Light And then some reach the eye/camera. Photons travel in a straight line When they hit an object they: bounce off in a new direction or are absorbed
Modeling Light. On Simulating the Visual Experience
 Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Image Restoration. Yao Wang Polytechnic Institute of NYU, Brooklyn, NY 11201
 Image Restoration Yao Wang Polytechnic Institute of NYU, Brooklyn, NY 11201 Partly based on A. K. Jain, Fundamentals of Digital Image Processing, and Gonzalez/Woods, Digital Image Processing Figures from
Image Restoration Yao Wang Polytechnic Institute of NYU, Brooklyn, NY 11201 Partly based on A. K. Jain, Fundamentals of Digital Image Processing, and Gonzalez/Woods, Digital Image Processing Figures from
3D Motion Analysis Based on 2D Point Displacements
 3D Motion Analysis Based on 2D Point Displacements 2D displacements of points observed on an unknown moving rigid body may provide information about - the 3D structure of the points - the 3D motion parameters
3D Motion Analysis Based on 2D Point Displacements 2D displacements of points observed on an unknown moving rigid body may provide information about - the 3D structure of the points - the 3D motion parameters
Announcements. Rotation. Camera Calibration
 Announcements HW1 has been posted See links on web page for reading Introduction to Computer Vision CSE 152 Lecture 5 Coordinate Changes: Rigid Transformations both translation and rotatoin Rotation About
Announcements HW1 has been posted See links on web page for reading Introduction to Computer Vision CSE 152 Lecture 5 Coordinate Changes: Rigid Transformations both translation and rotatoin Rotation About
Feature descriptors and matching
 Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
Feature descriptors and matching Detections at multiple scales Invariance of MOPS Intensity Scale Rotation Color and Lighting Out-of-plane rotation Out-of-plane rotation Better representation than color:
CONTENTS. High-Accuracy Stereo Depth Maps Using Structured Light. Yeojin Yoon
 [Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
[Paper Seminar 7] CVPR2003, Vol.1, pp.195-202 High-Accuracy Stereo Depth Maps Using Structured Light Daniel Scharstein Middlebury College Richard Szeliski Microsoft Research 2012. 05. 30. Yeojin Yoon Introduction
Pipeline Operations. CS 4620 Lecture 14
 Pipeline Operations CS 4620 Lecture 14 2014 Steve Marschner 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives
Pipeline Operations CS 4620 Lecture 14 2014 Steve Marschner 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives
Sources, shadows and shading
 Sources, shadows and shading But how bright (or what colour) are objects? One more definition: Exitance of a source is the internally generated power radiated per unit area on the radiating surface similar
Sources, shadows and shading But how bright (or what colour) are objects? One more definition: Exitance of a source is the internally generated power radiated per unit area on the radiating surface similar
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Announcements. Image Formation: Outline. Homogenous coordinates. Image Formation and Cameras (cont.)
") Announcements Image Formation and Cameras (cont.) HW1 due, InitialProject topics due today CSE 190 Lecture 6 Image Formation: Outline Factors in producing images Projection Perspective Vanishing points
Announcements Image Formation and Cameras (cont.) HW1 due, InitialProject topics due today CSE 190 Lecture 6 Image Formation: Outline Factors in producing images Projection Perspective Vanishing points
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Visibility Subspaces: Uncalibrated Photometric Stereo with Shadows
 Visibility Subspaces: Uncalibrated Photometric Stereo with Shadows Kalyan Sunkavalli, Todd Zickler, and Hanspeter Pfister Harvard University 33 Oxford St., Cambridge, MA, USA, 02138 {kalyans,zickler,pfister}@seas.harvard.edu
Visibility Subspaces: Uncalibrated Photometric Stereo with Shadows Kalyan Sunkavalli, Todd Zickler, and Hanspeter Pfister Harvard University 33 Oxford St., Cambridge, MA, USA, 02138 {kalyans,zickler,pfister}@seas.harvard.edu
Ray Tracer Due date: April 27, 2011
 Computer graphics Assignment 4 1 Overview Ray Tracer Due date: April 27, 2011 In this assignment you will implement the camera and several primitive objects for a ray tracer, and a basic ray tracing algorithm.
Computer graphics Assignment 4 1 Overview Ray Tracer Due date: April 27, 2011 In this assignment you will implement the camera and several primitive objects for a ray tracer, and a basic ray tracing algorithm.
Non-Contact Pulmonary Functional Testing through an improved Photometric Stereo Approach
 NON-CONTACT PULMONARY FUNCTIONAL TESTING: 1 Non-Contact Pulmonary Functional Testing through an improved Photometric Stereo Approach Jahanzeb Ahmad jahanzeb.ahmad@uwe.ac.uk Jiuai Sun jiuai2.sun@uwe.ac.uk
NON-CONTACT PULMONARY FUNCTIONAL TESTING: 1 Non-Contact Pulmonary Functional Testing through an improved Photometric Stereo Approach Jahanzeb Ahmad jahanzeb.ahmad@uwe.ac.uk Jiuai Sun jiuai2.sun@uwe.ac.uk
Announcements. Camera Calibration. Thin Lens: Image of Point. Limits for pinhole cameras. f O Z
 Announcements Introduction to Computer Vision CSE 152 Lecture 5 Assignment 1 has been posted. See links on web page for reading Irfanview: http://www.irfanview.com/ is a good windows utility for manipulating
Announcements Introduction to Computer Vision CSE 152 Lecture 5 Assignment 1 has been posted. See links on web page for reading Irfanview: http://www.irfanview.com/ is a good windows utility for manipulating
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class
![Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class](/thumbs/85/92905127.jpg "Announcements. Hough Transform [ Patented 1962 ] Generalized Hough Transform, line fitting. Assignment 2: Due today Midterm: Thursday, May 5 in class") Announcements Generalized Hough Transform, line fitting Assignment 2: Due today Midterm: Thursday, May 5 in class Introduction to Computer Vision CSE 152 Lecture 11a What is region like if: 1. λ 1 = 0?
Announcements Generalized Hough Transform, line fitting Assignment 2: Due today Midterm: Thursday, May 5 in class Introduction to Computer Vision CSE 152 Lecture 11a What is region like if: 1. λ 1 = 0?
Geometry: Outline. Projections. Orthographic Perspective
 Geometry: Cameras Outline Setting up the camera Projections Orthographic Perspective 1 Controlling the camera Default OpenGL camera: At (0, 0, 0) T in world coordinates looking in Z direction with up vector
Geometry: Cameras Outline Setting up the camera Projections Orthographic Perspective 1 Controlling the camera Default OpenGL camera: At (0, 0, 0) T in world coordinates looking in Z direction with up vector
Recovering illumination and texture using ratio images
 Recovering illumination and texture using ratio images Alejandro Troccoli atroccol@cscolumbiaedu Peter K Allen allen@cscolumbiaedu Department of Computer Science Columbia University, New York, NY Abstract
Recovering illumination and texture using ratio images Alejandro Troccoli atroccol@cscolumbiaedu Peter K Allen allen@cscolumbiaedu Department of Computer Science Columbia University, New York, NY Abstract
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Multi-view photometric stereo
 1 Multi-view photometric stereo Carlos Hernández, George Vogiatzis, Roberto Cipolla 2 Abstract This paper addresses the problem of obtaining complete, detailed reconstructions of textureless shiny objects.
1 Multi-view photometric stereo Carlos Hernández, George Vogiatzis, Roberto Cipolla 2 Abstract This paper addresses the problem of obtaining complete, detailed reconstructions of textureless shiny objects.
DIRECT SHAPE FROM ISOPHOTES
 DIRECT SHAPE FROM ISOPHOTES V.Dragnea, E.Angelopoulou Computer Science Department, Stevens Institute of Technology, Hoboken, NJ 07030, USA - (vdragnea, elli)@ cs.stevens.edu KEY WORDS: Isophotes, Reflectance
DIRECT SHAPE FROM ISOPHOTES V.Dragnea, E.Angelopoulou Computer Science Department, Stevens Institute of Technology, Hoboken, NJ 07030, USA - (vdragnea, elli)@ cs.stevens.edu KEY WORDS: Isophotes, Reflectance
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Estimation of Multiple Illuminants from a Single Image of Arbitrary Known Geometry*
 Estimation of Multiple Illuminants from a Single Image of Arbitrary Known Geometry* Yang Wang, Dimitris Samaras Computer Science Department, SUNY-Stony Stony Brook *Support for this research was provided
Estimation of Multiple Illuminants from a Single Image of Arbitrary Known Geometry* Yang Wang, Dimitris Samaras Computer Science Department, SUNY-Stony Stony Brook *Support for this research was provided
Robust Photometric Stereo using Sparse Regression
 Robust Photometric Stereo using Sparse Regression Satoshi Ikehata 1 David Wipf 2 Yasuyuki Matsushita 2 Kiyoharu Aizawa 1 1 The University of Tokyo, Japan 2 Microsoft Research Asia Abstract This paper presents
Robust Photometric Stereo using Sparse Regression Satoshi Ikehata 1 David Wipf 2 Yasuyuki Matsushita 2 Kiyoharu Aizawa 1 1 The University of Tokyo, Japan 2 Microsoft Research Asia Abstract This paper presents
Massachusetts Institute of Technology. Department of Computer Science and Electrical Engineering /6.866 Machine Vision Quiz I
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision Quiz I Handed out: 2004 Oct. 21st Due on: 2003 Oct. 28th Problem 1: Uniform reflecting