An Efficient Solution to the Eikonal Equation on Parametric Manifolds
|
|
|
- Poppy Wood
- 5 years ago
- Views:
Transcription
1 An Efficient Solution to the Eikonal Equation on Parametric Manifolds Alon Spira Ron Kimmel Department of Computer Science Technion Israel Institute of Technology Technion City, Haifa 32000, Israel February 23, 2004 Abstract We present an efficient solution to the Eikonal equation on parametric manifolds, based on the fast marching approach. This method overcomes the problem of a non-orthogonal coordinate system on the manifold by creating an appropriate numerical stencil. The method is tested numerically and demonstrated by calculating distances on various parametric manifolds. It is further used for two applications: image enhancement and face recognition. 1 Introduction The viscosity solution φ(x, y) of the Eikonal equation φ = F, (1) is a weighted distance map from a set of initial points, where the values of φ are given. The weights are given by the scalar positive function F (x, y). 1
2 Efficient solutions to the Eikonal equation on the plane parameterized by a regular (orthogonal) numerical grid were introduced by Sethian [12] and by Tsitsiklis [20]. Sethian s fast marching method was extended by Kimmel and Sethian [7] to the solution of the Eikonal equation on triangulated manifolds M φ = F, (2) with M the manifold and M φ the gradient on the manifold. This extension enables a fast calculation of geodesic paths [7], Voronoi diagrams, and offsets [8, 9] on triangulated manifolds. Sethian and Vladimirsky [15] presented Ordered Upwind Methods (OUM) for static Hamilton-Jacobi equations. These methods enable the solution of equations where the directions of the characteristics are different from those of the gradients of φ. As an example, they demonstrate the solution of the Eikonal equation for manifolds which are function graphs. Also Tsai et al. [19] solved the equation on function graphs, but they used an iterative sweeping method. A similar sweeping approach was previously used by Danielson [3] to compute Euclidean distance maps on flat domains with regular grids. Mémoli and Sapiro [10] calculated distances on implicit manifolds by using orthogonal fast marching in a thin offset band surrounding the manifold. We present here an efficient solution to the Eikonal equation on parametric manifolds, based on the fast marching approach 1. A parametric manifold consists of a parameterization plane U = {u 1, u 2 } R 2, which is mapped by X : R 2 R N to the parametric manifold X(U) = {x 1 (u 1, u 2 ), x 2 (u 1, u 2 ),..., x N (u 1, u 2 )} R N. In this method the calculations are done on the 2-dimensional uniform Cartesian grid of the parameterization plane and not on the manifold like in Kimmel and Sethian s method or in R N according to Mémoli and Sapiro. The numerical stencil at each grid point is calculated directly from the metric and there is no need for the unfolding 1 An early version of the paper was presented at the INTERPHASE 2003 meeting at the Newton Insitute during the 2003 Programme Computational Challenges in PDEs [17]. 2
3 procedure of Kimmel and Sethian or for finding the near front as done by Sethian and Vladimirsky. The proposed method solves the equation in one sweep of the numerical grid as opposed to Tsai et al. s method, which is an iterative approach that performs several sweeps in every iteration. Furthermore, the number of iterations required for the convergence of their method depends on the anisotropy of the equation. The presented method is first order accurate as that of Kimmel and Sethian, but may be extended to higher orders by using Sethian and Vladimirsky s higher order directional derivative ( approximations [14]. The error of Mémoli and Sapiro s method h ) is o. The derivatives of X with respect to u i are defined as X i X u i, and they constitute a non-orthogonal coordinate system on the parametric manifold. See Figure 1. The distance element on the manifold is ds = g ij du i du j, (3) where we use Einstein s summation convention, and the metric tensor of the manifold g ij is calculated by (g ij ) = ( g11 g 12 g 21 g 22 ) This paper is organized as follows. = ( X1 X 1 X 1 X 2 X 2 X 1 X 2 X 2 ). (4) The second section describes the non-orthogonality of the coordinate system on the manifold and the resulting problem. Section 3 introduces the construction of a numerical stencil which overcomes this problem. Section 4 presents the numerical scheme, and Section 5 the marching method for solving the Eikonal equation on the manifold. The performance and accuracy of the numerical scheme is tested in Section 6. Section 7 demonstrates applications of the numerical scheme in image processing and computer vision. The conclusions appear in Section 8. 3
4 X X 1 X 2 U u 1 X(U) Figure 1: The orthogonal grid on the parameterization plane is transformed into a non-orthogonal one on the manifold. 2 The Non-Orthogonal Coordinate System on the Manifold The power of the fast marching algorithm lies in its ability to solve the Eikonal equation in one sweep without iterations. The algorithm takes advantage of the upwind nature of the Eikonal equation in order to update the value of each grid point by a number of times bounded by the number of its neighbors. We would like to devise a similar algorithm for Equation (2). The orthogonal fast marching algorithm [12] solves the Eikonal equation for an orthogonal coordinate system. In this case, the numerical stencil for the update of a grid point consists of one or two points out of its four neighbors. The first point is one of the top/bottom pair and the second is one of the left/right pair. The two grid points in the stencil, together with the updated grid point, compose the vertices of a right triangle. See Figure 2. 4
5 Figure 2: The numerical stencil for the orthogonal fast marching algorithm is a right triangle. This is not the case for manifolds with g 12 0, where we get a nonorthogonal coordinate system on the manifold, see Figure 3. The resulting triangles are not right triangles. Each grid point is the origin of two acute angles and two obtuse angles. If a grid point is updated by a stencil with an obtuse angle, a problem may arise. Depending on the direction of the advancing update front, the value of one of the points of the stencil might not be set in time and cannot be used properly for supporting the updated vertex. There is a similar problem with fast marching on triangulated domains which contain obtuse angles [7]. 3 Splitting Obtuse Angles Our solution to obtuse angles is similar to that of [7] with the exception that there is no need for the unfolding step. We perform a pre-processing stage for the grid, in which we split every obtuse triangle into two acute ones, see Figure 4. The split is performed by adding an additional edge, connecting the updated grid point with a non-neighboring grid point. The 5
6 X 2 X 1 Figure 3: Two acute angles and two obtuse angles for a non-orthogonal coordinate system on the manifold. distant grid point becomes part of the numerical stencil. The need for splitting is determined according to the angle between the non-orthogonal axes at the grid point. It is calculated by ( ) X1 X 2 cos (α) = = g 12. (5) X 1 X 2 g11 g 22 If cos (α) = 0, the axes are perpendicular, and no splitting is required. If cos (α) < 0, the two angles with an angle of α should be split. Otherwise, the two other angles should be split. The denominator of Equation (5) is always positive, so we need only check the sign of the numerator g 12. In order to split an angle, we should connect the updated grid point with another point, located m grid points from the point in the direction of X 1 and n grid points in the direction of X 2 (m and n may be negative). The point provides a good numerical support, if the obtuse angle is split into two acute ones. For cos (α) < 0 this is the case if ( ) X1 (mx 1 + nx 2 ) mg 11 + ng cos (β 1 ) = = 12 X 1 mx 1 + nx 2 g11 (m 2 g mng 12 + n 2 g 22 ) > 0, (6) and cos (β 2 ) = ( ) X2 (mx 1 + nx 2 ) = X 2 mx 1 + nx 2 mg 12 + ng 22 g22 (m 2 g mng 12 + n 2 g 22 ) > 0. 6 (7)
7 1 3 β 2 β 1 2 α 4 X 2 X 1 Figure 4: The numerical stencil for the non-orthogonal coordinate system. Triangle 1 gives good numerical support to the black grid point, but triangle 2 includes an obtuse angle. It is replaced by triangle 3 and triangle 4. Also here, it is enough to check the sign of the numerators. For cos (α) > 0, the equation for cos (β 2 ) changes its sign and the constraints are mg 11 + ng 12 > 0, (8) and mg 12 + ng 22 < 0. (9) Equations (6,7,8,9) give together the condition g 12 n g 11 < m < g 22 n g 12, (10) and we would like to find the minimal m and n that satisfy this condition. We define P = g 12 g 11 and Q = g 22 g 12. The problem is solved by the following algorithm If P 1, p = P P and q = Q P. Else, p = P and q = Q. 7
8 Start with n = 1. P n = p n, Q n = q n. If P n < Q n, then m = P n. Else, set n = n + 1 and return to the previous step. If P 1, m = m + P n. If cos (α) > 0, then n = n. If we define L = 1/(Q P ) = g 12 g 11 g, with g = det(g ij ) = g 11 g 22 g 2 12, then n is bounded by L, because for n = L we have Q n P n > 1, and there will be an m that complies to the condition in Equation (10). We could use binary search and the bound L to get a complexity of O(log L) for this algorithm, but because the bound is not a tight one, we use the algorithm as is. It should be noted that g ij and therefore L are parameterization dependent. If we have a parameterization with regions where X 1 and X 2 are almost parallel, the resulting m and n might be large, affecting the accuracy and efficiency of the numerical scheme. 4 The Numerical Scheme Once the pre-processing stage is over, we have a suitable numerical stencil for each grid point and we can solve the Eikonal equation numerically. The stencil is composed of the vertices of an acute angle, see Figure 5, where the vertex C is updated according to the vertices A and B. If the triangle was originally acute, we have a = g 11, b = g 22 and θ = α. If it is a triangle created by splitting, we have a = g 11 or a = g 22, b = m 2 g mng 12 + n 2 g 22 and θ = β 1 or θ = β 2. Next, we want to find t such that t u h = F. The numerical scheme according to [7] is u = φ(b) φ(a). 8
9 t C h u B B a A C θ b A Figure 5: Two views of the numerical stencil. Solve the quadratic equation (a 2 +b 2 2ab cos θ)t 2 +2bu(a cos θ b)t+b 2 (u 2 F 2 a 2 sin 2 θ) = 0. (11) If u < t and a cos θ < b(t u) < a, then φ(c) = min{φ(c), t + φ(a)}. t cos θ Else, φ(c) = min{φ(c), bf + φ(a), af + φ(b)}. 5 Marching on Manifolds After the pre-processing stage, the Eikonal equation is solved by the following algorithm [13]. Initialization: The initial points are defined as Accepted and given their initial values. All the other grid points are defined as Far and given the value infinity. Iterations: 1. Far neighbors of Accepted points are defined as Close. 2. The values of the Close points are updated according to the numerical scheme. 9
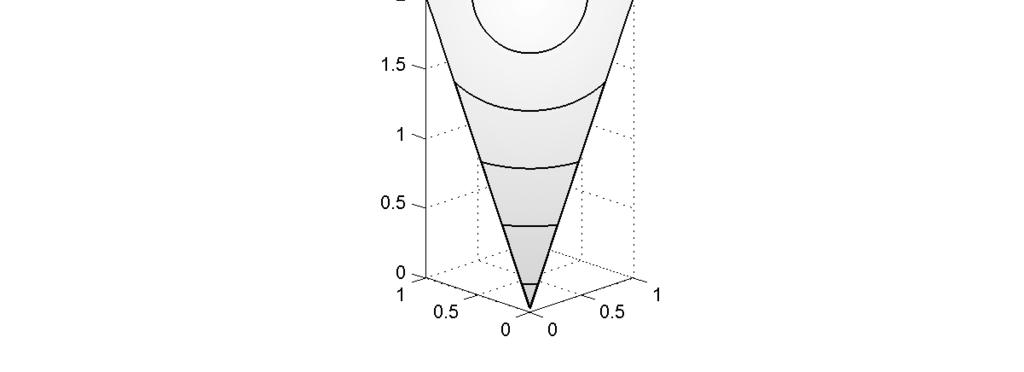
10 3. The Close point with the minimal value becomes an Accepted point. 4. If there remain any Far points, return to step 1. We used the term neighbors above to describe grid points that belong to the same triangular numerical stencil. These points are not necessarily neighboring points on the original grid. We find these neighbors during the pre-processing stage described in the previous section. The complexity of the algorithm is upper bounded by O(N max(log L, log N)), where N is the number of points in the grid. The log N results from using a min-heap data structure for sorting the Close points [13]. 6 Testing the Numerical Scheme The algorithm was tested for parametric manifolds with non-orthogonal coordinate systems. In Figure 6 it is implemented on the tilted plane z = 3x + 2y, with the initial point at (x = 0.5, y = 0.5). In this figure and the ones to follow, lower values are assigned brighter shades of gray and black curves are used to indicate the level curves. The correctness of the distance map is evident from the resulting level curves, which are concentric circles on the manifold. In Figure 7 the algorithm is implemented for the manifold z = 0.5 sin(4πx) sin(4πy) with the same initial point. The proposed algorithm can work also for parametric manifolds that are not function graphs. In Figure 8 the algorithm is implemented for the sphere {x = cos(θ) cos(φ), y = sin(θ) cos(φ), z = sin(φ)}. In this case, The initial points construct a square on the parameterization plane {u 1, u 2 } = {θ, φ}. The range of the parameters in the figure is 54 < θ, φ < 54. In Figure 9 the algorithm is implemented on the tilted plane z = 2x + 2y. This time, F on the right hand side of the Eikonal equation (2) changes abruptly on the parameterization plane. Its value is F = 10 for x > 0.5, y > 0.5 and F = 1 otherwise. This figure shows that the numerical scheme can handle a sharply changing F. 10





11 u1 u2 Figure 6: Fast marching on the manifold z = 3x + 2y. Left: implemented u1 on the parameterization plane. Right: projected on the manifold. u2 Figure 7: Fast marching on the manifold z = 0.5 sin(4πx) sin(4πy). Left: implemented on the parameterization plane. Right: projected on the manifold. 11




12 Figure 8: Fast marching on a sphere. Left: implemented on the parameterization plane. Right: projected on the manifold. Figure 9: Fast marching with a non-constant F. Left: implemented on the parameterization plane. Right: projected on the manifold. 12
13 The accuracy of the algorithm is measured by running the algorithm on the manifold z = 0.5 sin(4πx) sin(4πy) with one initial point at (x = 0.5, y = 0.5). Table 1 gives the estimated errors of the algorithm on various grid sizes and estimations of the order of accuracy. The normalized L 2 error at grid size n 2 is e n 2 = v un 2 n 2, where u n is the result of the algorithm on a grid of size n 2 and v is the correct solution. The L error for this grid is e n = v u n. Since v is unknown, we estimate it by the result of the algorithm on a grid of size Assuming that v is of the form v = u n +Ch r +O(h r+1 ), where h = 1, the order of accuracy of the numerical scheme according to the L n 1 k norm at grid size n 2 can be estimated according to [11] ( ) e rk n n = log k 2. (12) e 2n k size: e n 2: r2 n : e n : r : n Table 1: The estimated errors and orders of accuracy of the algorithm as a function of grid size. 7 Applications in Image Processing and Computer Vision The solution to the Eikonal equation on parametric manifolds has many applications. In this section we demonstrate its use in the areas of image processing and computer vision. The first application consists of the acceleration of the image enhancing Beltrami filter [6, 16] by using a short time kernel [18]. Calculating the kernel requires the solution to the Eikonal equation on the image manifold. The second application is the implementation 13
14 of face recognition [1] by geometric invariants [4, 5] without reconstruction of the facial surface [2]. In this case a signature of the face is computed from geodesic distances between points on the facial manifold. The geodesic distances are calculated from the surface metric using our method. 7.1 A Short Time Kernel for the Beltrami Filter The Beltrami filter [6, 16] results from the minimization of the area of the 2- dimensional Riemannian image manifold U embedded in the space-feature manifold R N, where N = 3 for gray scale images and N = 5 for color images. For gray scale images we have X(u 1, u 2 ) = {u 1, u 2, I(u 1, u 2 )}, (13) where u 1, u 2 are the space coordinates and I is the intensity component. We use a Euclidean space-feature manifold with the metric h ij given by (h ij ) = 0 1 0, (14) 0 0 β 2 where β is the relative scale between the space coordinates and the intensity component. The metric g ij of the image manifold is derived by the pullback procedure (g ij ) = ( 1 + β 2 I 2 1 β 2 I 1 I 2 β 2 I 1 I β 2 I 2 2 ), (15) where I i I u i. A similar derivation is applicable for color images. The Beltrami filter results from minimizing the area of the image manifold S = gdu1 du 2, (16) with respect to the embedding. The corresponding Euler-Lagrange equations as a gradient descent process are X a t = g 1 2 h ab δs δx = 1 b g 2 i (g 1 2 g ij j X a ), (17) 14
15 with g ij the contravariant metric of the image manifold. For gray scale images we get I t = g 1 2 µ (g 1 2 g µν ν I) = M I. (18) Using the short time kernel [18], we replace the partial differential equation (18) with a convolution-like process I(u 1, u 2, t 0 + t) = I(ũ 1, ũ 2, t 0 )K(u 1, u 2, ũ 1, ũ 2 ; t)dũ 1 dũ 2, (19) where ( ) (ũ 1 K(u 1, u 2, ũ 1, ũ 2 ; t) = H,ũ 2 2 ) 0 t exp ds (u 1,u 2 ), 4t (20) and H 0 is taken such that integration over the kernel equals one. The operand of the exponent in this equation includes the geodesic distance between the filtered pixel and its neighboring pixels. Its calculation necessitates the solution to the Eikonal equation on the image manifold. Figure 10 shows the result of applying the short time kernel Beltrami filter to a gray scale image. In this case β = 3, the time step taken was t = 0.5, and only grid points with a kernel value above 0.01 were used for the filtering. The time difference between the images is Face Signature without Reconstruction of the Facial Surface Face recognition by geometric invariants [1], which is an application of the bending invariant canonical forms [4, 5], relies on a signature of the face computed from geodesic distances between points on the facial manifold. This use of geodesic distances makes this method highly robust to isometric deformations of the face, such as those resulting from facial expressions. The face manifold is given by X(u 1, u 2 ) = {u 1, u 2, z(u 1, u 2 )}, (21) 15

16 Figure 10: Application of the short time kernel Beltrami filter to a gray scale image. The original image is in the top left. The order of the images is from top to bottom and left to right. 16
17 and its metric can be acquired by photometric stereo, which requires at least three images of the face using independent illumination directions. Assuming a Lambertian reflection model, the generated images are I i (u 1, u 2 ) = ρ(u 1, u 2 )N(u 1, u 2 ) L i, (22) where ρ(u 1, u 2 ) is the albedo at each point, N(u 1, u 2 ) is the normal to the facial surface and L i is the illumination direction for the i image. The normal is given by N(u 1, u 2 ) = { z 1(u 1, u 2 ), z 2 (u 1, u 2 ), 1} 1 + z(u1, u 2 ) 2, (23) where z i z u i. Given at least three images with independent illumination directions, z(u 1, u 2 ) can be extracted by Least Squares. The facial surface metric is ( ) 1 + z 2 (g ij ) = 1 z 1 z 2, (24) z 1 z z2 2 and it enables the calculation of geodesic distances on the facial surface by our method for the solution of the Eikonal equation on such manifolds. Figure 11 shows distance maps calculated by our method from the metric of a face manifold. Note that the manifold itself {u 1, u 2, z(u 1, u 2 )} needs not be reconstructed. The calculation of geodesic distances enables the use of the bending invariant canonical forms framework [4, 5] to produce a face signature. In this framework, the face manifold is sampled and a matrix of the geodesic distances between the points is produced. Using multidimensional scaling (MDS) the points are embedded in R 3, where they tend to form a 2-dimensional function. The face signature is then constructed from this function. Because the geodesic distances are invariant to isometric deformations, this signature is robust to such deformations, which are frequent in face manifolds. For details on the quality and characteristics of this face signature see [1, 2]. 17




18 Figure 11: Distance maps of a face manifold from various source points. The level curves of the distance maps are drawn on the parameterization plane. 18
19 8 Conclusions A new efficient method for solving the Eikonal equation on parametric manifolds was introduced. The method requires only the metric tensor at each grid point in order to determine the numerical stencil and execute the numerical scheme. This method enables a fast calculation of distances on manifolds, needed in many applications. Acknowledgements: We thank I. Blayvas for helpful suggestions, M. Bronstein and A. Bronstein for the facial manifold metric data, and the anonymous reviewers for their good comments. References [1] A. Bronstein, M. Bronstein, and R. Kimmel. Expression-invariant 3D face recognition. In Proc. Audio and Video-based Biometric Person Authentication (AVBPA), Lecture Notes in Comp. Science 2688, pages Springer, [2] A. Bronstein, M. Bronstein, R. Kimmel, and A. Spira. 3D face recognition without facial surface reconstruction. submitted for publication, March [3] P. Danielson. Euclidean distance mapping. Computer Graphics and Image Processing, (14): , [4] A. Elad and R. Kimmel. Bending invariant representations for surfaces. In Proc. of CVPR 2001, Hawaii, December [5] A. Elad and R. Kimmel. On bending invariant signatures for surfaces. IEEE Transactions on Pattern Analysis and Machine Intelligence, 25(10): ,
20 [6] R. Kimmel, R. Malladi, and N. Sochen. Image processing via the Beltrami operator. In Proc. of 3-rd Asian Conf. on Computer Vision, Hong Kong, January [7] R. Kimmel and J. Sethian. Computing geodesic paths on manifolds. Proceedings of National Academy of Sciences, 95(15): , July [8] R. Kimmel and J. Sethian. Fast Voronoi diagrams and offsets on triangulated surfaces. In AFA Conference on Curves and Surfaces, Saint- Malo, France, July [9] R. Kimmel and J. Sethian. Optimal algorithm for shape from shading and path planning. Journal of Mathematical Imaging and Vision, 14(3): , May [10] F. Mémoli and G. Sapiro. Fast computation of weighted distance functions and geodesics on implicit hyper-surfaces. Journal of Computational Physics, 173(2): , [11] S. Osher and J. Sethian. Fronts propagation with curvature dependent speed: Algorithms based on Hamilton-Jacobi formulations. J. Comput. Phys., 79:12 49, [12] J. Sethian. A fast marching level set method for monotonically advancing fronts. Proceedings of National Academy of Sciences, 93(4): , [13] J. Sethian. Level Set Methods and Fast Marching Methods. Cambridge university press, [14] J. Sethian and A. Vladimirsky. Fast methods for the Eikonal and related Hamilton-Jacobi equations on unstractured meshes. Proc. Nat. Acad. Sci. USA, 97: ,
21 [15] J. Sethian and A. Vladimirsky. Ordered upwind methods for static Hamilton-Jacobi equations: theory and applications. SIAM J. on Numerical Analysis, 41(1): , [16] N. Sochen, R. Kimmel, and R. Malladi. A general framework for low level vision. IEEE Trans. on Image Processing, 7(3): , [17] A. Spira and R. Kimmel. An efficient solution to the Eikonal equation on parametric manifolds. In INTERPHASE 2003 meeting, Isaac Newton Institute for Mathematical Sciences, 2003 Preprints, Preprint no. NI03045-CPD, UK, June [18] A. Spira, R. Kimmel, and N. Sochen. Efficient Beltrami flow using a short time kernel. In Proc. of Scale Space 2003, Isle of Skye, Scotland, June [19] Y. Tsai, L. Cheng, S. Osher, and H. Zhao. Fast sweeping algorithms for a class of Hamilton-Jacobi equations. SIAM Journal on Numerical Analysis, 41(2): , [20] J. Tsitsiklis. Efficient algorithms for globally optimal trajectories. IEEE Trans. on Automatic Control, 40(9): ,
Fast marching methods
 1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
Defense Technical Information Center Compilation Part Notice
 UNCLASSIFIED Defense Technical Information Center Compilation Part Notice ADP012029 TITLE: Fast Voronoi Diagrams and Offsets on Triangulated Surfaces DISTRIBUTION: Approved for public release, distribution
UNCLASSIFIED Defense Technical Information Center Compilation Part Notice ADP012029 TITLE: Fast Voronoi Diagrams and Offsets on Triangulated Surfaces DISTRIBUTION: Approved for public release, distribution
IMA Preprint Series # 2021
 O(N) IMPLEMENTATION OF THE FAST MARCHING ALGORITHM By Liron Yatziv Alberto Bartesaghi and Guillermo Sapiro IMA Preprint Series # 2021 ( February 2005 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY
O(N) IMPLEMENTATION OF THE FAST MARCHING ALGORITHM By Liron Yatziv Alberto Bartesaghi and Guillermo Sapiro IMA Preprint Series # 2021 ( February 2005 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS UNIVERSITY
The Level Set Method. Lecture Notes, MIT J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations
 The Level Set Method Lecture Notes, MIT 16.920J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations Per-Olof Persson persson@mit.edu March 7, 2005 1 Evolving Curves and Surfaces Evolving
The Level Set Method Lecture Notes, MIT 16.920J / 2.097J / 6.339J Numerical Methods for Partial Differential Equations Per-Olof Persson persson@mit.edu March 7, 2005 1 Evolving Curves and Surfaces Evolving
Fast Marching Methods (1) are numerical algorithms for
 are numerical algorithms for") Fast methods for the Eikonal and related Hamilton Jacobi equations on unstructured meshes J. A. Sethian* and A. Vladimirsky Department of Mathematics, University of California, Berkeley, CA 94720 Communicated
Fast methods for the Eikonal and related Hamilton Jacobi equations on unstructured meshes J. A. Sethian* and A. Vladimirsky Department of Mathematics, University of California, Berkeley, CA 94720 Communicated
June Wesley, Cambridge Univ. Press,
 [6] P Dupuis and J Oliensis. An optimal control formulation and related numerical methods for a problem in shape reconstruction. Ann. Appl. Probab., 4():87{ 346, 994. [7] B K P Horn. Obtaining shape from
[6] P Dupuis and J Oliensis. An optimal control formulation and related numerical methods for a problem in shape reconstruction. Ann. Appl. Probab., 4():87{ 346, 994. [7] B K P Horn. Obtaining shape from
Tutorial 9 - Fast Marching Methods
 236861 Numerical Geometry of Images Tutorial 9 Fast Marching Methods c 2012 Why measure distances? Shape analysis Image analysis Registration Morphology Navigation And many other uses.. There are many
236861 Numerical Geometry of Images Tutorial 9 Fast Marching Methods c 2012 Why measure distances? Shape analysis Image analysis Registration Morphology Navigation And many other uses.. There are many
THE EIKONAL EQUATION: NUMERICAL EFFICIENCY VS. ALGORITHMIC COMPLEXITY ON QUADRILATERAL GRIDS. 1. Introduction. The Eikonal equation, defined by (1)
") Proceedings of ALGORITMY 2005 pp. xx yy THE EIKONAL EQUATION: NUMERICAL EFFICIENCY VS. ALGORITHMIC COMPLEXITY ON QUADRILATERAL GRIDS SHU-REN HYSING AND STEFAN TUREK Abstract. This paper presents a study
Proceedings of ALGORITMY 2005 pp. xx yy THE EIKONAL EQUATION: NUMERICAL EFFICIENCY VS. ALGORITHMIC COMPLEXITY ON QUADRILATERAL GRIDS SHU-REN HYSING AND STEFAN TUREK Abstract. This paper presents a study
Fast Marching and Geodesic Methods. Some Applications
 Fast Marching and Geodesic Methods. Some Applications Laurent D. COHEN Directeur de Recherche CNRS CEREMADE, UMR CNRS 7534 Université Paris-9 Dauphine Place du Maréchal de Lattre de Tassigny 75016 Paris,
Fast Marching and Geodesic Methods. Some Applications Laurent D. COHEN Directeur de Recherche CNRS CEREMADE, UMR CNRS 7534 Université Paris-9 Dauphine Place du Maréchal de Lattre de Tassigny 75016 Paris,
Isometric embedding of facial surfaces into S 3
 Isometric embedding of facial surfaces into S 3 Alexander M. Bronstein 1, Michael M. Bronstein 2, and Ron Kimmel 2 1 Department of Electrical Engineering, alexbron@ieee.org 2 Department of Computer Science,
Isometric embedding of facial surfaces into S 3 Alexander M. Bronstein 1, Michael M. Bronstein 2, and Ron Kimmel 2 1 Department of Electrical Engineering, alexbron@ieee.org 2 Department of Computer Science,
Texture Mapping using Surface Flattening via Multi-Dimensional Scaling
 Texture Mapping using Surface Flattening via Multi-Dimensional Scaling Gil Zigelman Ron Kimmel Department of Computer Science, Technion, Haifa 32000, Israel and Nahum Kiryati Department of Electrical Engineering
Texture Mapping using Surface Flattening via Multi-Dimensional Scaling Gil Zigelman Ron Kimmel Department of Computer Science, Technion, Haifa 32000, Israel and Nahum Kiryati Department of Electrical Engineering
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces.
 weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS
 SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS JIAN LIANG AND HONGKAI ZHAO Abstract. In this paper we present a general framework for solving partial differential equations on manifolds represented
SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS JIAN LIANG AND HONGKAI ZHAO Abstract. In this paper we present a general framework for solving partial differential equations on manifolds represented
Path Planning and Numerical Methods for Static (Time-Independent / Stationary) Hamilton-Jacobi Equations
 Hamilton-Jacobi Equations") Path Planning and Numerical Methods for Static (Time-Independent / Stationary) Hamilton-Jacobi Equations Ian Mitchell Department of Computer Science University of British Columbia Outline Path Planning
Path Planning and Numerical Methods for Static (Time-Independent / Stationary) Hamilton-Jacobi Equations Ian Mitchell Department of Computer Science University of British Columbia Outline Path Planning
Technical Report. Fast Marching farthest point sampling. Carsten Moenning, Neil A. Dodgson. Number 562. April Computer Laboratory
 Technical Report UCAM-CL-TR-562 ISSN 1476-2986 Number 562 Computer Laboratory Fast Marching farthest point sampling Carsten Moenning, Neil A. Dodgson April 2003 15 JJ Thomson Avenue Cambridge CB3 0FD United
Technical Report UCAM-CL-TR-562 ISSN 1476-2986 Number 562 Computer Laboratory Fast Marching farthest point sampling Carsten Moenning, Neil A. Dodgson April 2003 15 JJ Thomson Avenue Cambridge CB3 0FD United
Fast sweeping methods for eikonal equations on triangular meshes
 Fast sweeping methods for eikonal equations on triangular meshes Jianliang Qian, Yong-Tao Zhang 2, and Hong-Kai Zhao 3 Abstract The original fast sweeping method, which is an efficient iterative method
Fast sweeping methods for eikonal equations on triangular meshes Jianliang Qian, Yong-Tao Zhang 2, and Hong-Kai Zhao 3 Abstract The original fast sweeping method, which is an efficient iterative method
Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint
 Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint Vikram Appia Anthony Yezzi Georgia Institute of Technology, Atlanta, GA, USA. Abstract We present an active
Active Geodesics: Region-based Active Contour Segmentation with a Global Edge-based Constraint Vikram Appia Anthony Yezzi Georgia Institute of Technology, Atlanta, GA, USA. Abstract We present an active
Automated Segmentation Using a Fast Implementation of the Chan-Vese Models
 Automated Segmentation Using a Fast Implementation of the Chan-Vese Models Huan Xu, and Xiao-Feng Wang,,3 Intelligent Computation Lab, Hefei Institute of Intelligent Machines, Chinese Academy of Science,
Automated Segmentation Using a Fast Implementation of the Chan-Vese Models Huan Xu, and Xiao-Feng Wang,,3 Intelligent Computation Lab, Hefei Institute of Intelligent Machines, Chinese Academy of Science,
Level set methods Formulation of Interface Propagation Boundary Value PDE Initial Value PDE Motion in an externally generated velocity field
 Level Set Methods Overview Level set methods Formulation of Interface Propagation Boundary Value PDE Initial Value PDE Motion in an externally generated velocity field Convection Upwind ddifferencingi
Level Set Methods Overview Level set methods Formulation of Interface Propagation Boundary Value PDE Initial Value PDE Motion in an externally generated velocity field Convection Upwind ddifferencingi
Laurent D. Cohen 2 CEREMADE, Université Paris Dauphine PARIS CEDEX 16 - FRANCE
 The shading zone problem in geodesic voting and its solutions for the segmentation of tree structures. Application to the segmentation of Microglia extensions Youssef Rouchdy 1,2 University of Pennsylvania
The shading zone problem in geodesic voting and its solutions for the segmentation of tree structures. Application to the segmentation of Microglia extensions Youssef Rouchdy 1,2 University of Pennsylvania
Fast Marching farthest point sampling
 Fast Marching farthest point sampling Carsten Moenning and Neil A. Dodgson University of Cambridge Computer Laboratory 15 JJ Thomson Avenue, Cambridge CB3 0FD - UK {cm230,nad}@cl.cam.ac.uk Abstract We
Fast Marching farthest point sampling Carsten Moenning and Neil A. Dodgson University of Cambridge Computer Laboratory 15 JJ Thomson Avenue, Cambridge CB3 0FD - UK {cm230,nad}@cl.cam.ac.uk Abstract We
Three-Dimensional Face Recognition
 Three-Dimensional Face Recognition Michael M. Bronstein Department of Computer Science Technion Israel Institute of Technology, Haifa 32000, Israel Alexander M. Bronstein Department of Electrical Engineering
Three-Dimensional Face Recognition Michael M. Bronstein Department of Computer Science Technion Israel Institute of Technology, Haifa 32000, Israel Alexander M. Bronstein Department of Electrical Engineering
Ordered upwind methods for static Hamilton Jacobi equations
 Ordered upwind methods for static Hamilton Jacobi equations J. A. Sethian* and A. Vladimirsky Department of Mathematics, University of California, Berkeley, CA 94720 Edited by Alexandre J. Chorin, University
Ordered upwind methods for static Hamilton Jacobi equations J. A. Sethian* and A. Vladimirsky Department of Mathematics, University of California, Berkeley, CA 94720 Edited by Alexandre J. Chorin, University
Integrated Active Contours for Texture Segmentation
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL., NO., FEBRUARY 2004 Integrated Active Contours for Texture Segmentation Chen Sagiv, Nir A. Sochen, Member, IEEE, and Yehoshua Y. Zeevi Abstract We address the
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL., NO., FEBRUARY 2004 Integrated Active Contours for Texture Segmentation Chen Sagiv, Nir A. Sochen, Member, IEEE, and Yehoshua Y. Zeevi Abstract We address the
Numerical schemes for Hamilton-Jacobi equations, control problems and games
 Numerical schemes for Hamilton-Jacobi equations, control problems and games M. Falcone H. Zidani SADCO Spring School Applied and Numerical Optimal Control April 23-27, 2012, Paris Lecture 2/3 M. Falcone
Numerical schemes for Hamilton-Jacobi equations, control problems and games M. Falcone H. Zidani SADCO Spring School Applied and Numerical Optimal Control April 23-27, 2012, Paris Lecture 2/3 M. Falcone
Geodesics in heat: A new approach to computing distance
 Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
Multiple Contour Finding and Perceptual Grouping as a set of Energy Minimizing Paths
 Multiple Contour Finding and Perceptual Grouping as a set of Energy Minimizing Paths Laurent D. COHEN and Thomas DESCHAMPS CEREMADE, UMR 7534, Université Paris-Dauphine 75775 Paris cedex 16, France cohen@ceremade.dauphine.fr
Multiple Contour Finding and Perceptual Grouping as a set of Energy Minimizing Paths Laurent D. COHEN and Thomas DESCHAMPS CEREMADE, UMR 7534, Université Paris-Dauphine 75775 Paris cedex 16, France cohen@ceremade.dauphine.fr
The Isophotic Metric and its Application to Feature Sensitive Morphology on Surfaces
 The Isophotic Metric and its Application to Feature Sensitive Morphology on Surfaces Helmut Pottmann 1, Tibor Steiner 1, Michael Hofer 1, Christoph Haider 2, and Allan Hanbury 3 1 Institute of Geometry,
The Isophotic Metric and its Application to Feature Sensitive Morphology on Surfaces Helmut Pottmann 1, Tibor Steiner 1, Michael Hofer 1, Christoph Haider 2, and Allan Hanbury 3 1 Institute of Geometry,
Key words. Hamilton-Jacobi, Eikonal, viscosity solution, Fast Marching, Fast Sweeping
 COMPUTATIONAL STUDY OF FAST METHODS FOR THE EIKONAL EQUATION PIERRE A. GREMAUD AND CHRISTOPHER M. KUSTER Abstract. A computational study of the Fast Marching and the Fast Sweeping methods for the Eikonal
COMPUTATIONAL STUDY OF FAST METHODS FOR THE EIKONAL EQUATION PIERRE A. GREMAUD AND CHRISTOPHER M. KUSTER Abstract. A computational study of the Fast Marching and the Fast Sweeping methods for the Eikonal
Invariant shape similarity. Invariant shape similarity. Invariant similarity. Equivalence. Equivalence. Equivalence. Equal SIMILARITY TRANSFORMATION
 1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
Parallel algorithms for approximation of distance maps on parametric surfaces
 Parallel algorithms for approximation of distance maps on parametric surfaces Alexander M. Bronstein Michael M. Bronstein Yohai S. Devir Ron Kimmel Ofir Weber Department of Computer Science, Technion Israel
Parallel algorithms for approximation of distance maps on parametric surfaces Alexander M. Bronstein Michael M. Bronstein Yohai S. Devir Ron Kimmel Ofir Weber Department of Computer Science, Technion Israel
On-line, Incremental Learning of a Robust Active Shape Model
 On-line, Incremental Learning of a Robust Active Shape Model Michael Fussenegger 1, Peter M. Roth 2, Horst Bischof 2, Axel Pinz 1 1 Institute of Electrical Measurement and Measurement Signal Processing
On-line, Incremental Learning of a Robust Active Shape Model Michael Fussenegger 1, Peter M. Roth 2, Horst Bischof 2, Axel Pinz 1 1 Institute of Electrical Measurement and Measurement Signal Processing
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Background for Surface Integration
 Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
Background for urface Integration 1 urface Integrals We have seen in previous work how to define and compute line integrals in R 2. You should remember the basic surface integrals that we will need to
A Fast Phase Space Method for Computing Creeping Rays KTH. High Frequency Wave Propagation CSCAMM, September 19-22, 2005
 A Fast Phase Space Method for Computing Creeping Rays Olof Runborg Mohammad Motamed KTH High Frequency Wave Propagation CSCAMM, September 19-22, 2005 Geometrical optics for high-frequency waves Consider
A Fast Phase Space Method for Computing Creeping Rays Olof Runborg Mohammad Motamed KTH High Frequency Wave Propagation CSCAMM, September 19-22, 2005 Geometrical optics for high-frequency waves Consider
Meshless Modeling, Animating, and Simulating Point-Based Geometry
 Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Multidimensional scaling
 Multidimensional scaling Lecture 5 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Cinderella 2.0 2 If it doesn t fit,
Multidimensional scaling Lecture 5 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Cinderella 2.0 2 If it doesn t fit,
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Multi-Scale Free-Form Surface Description
 Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
A Study of Numerical Methods for the Level Set Approach
 A Study of Numerical Methods for the Level Set Approach Pierre A. Gremaud, Christopher M. Kuster, and Zhilin Li October 18, 2005 Abstract The computation of moving curves by the level set method typically
A Study of Numerical Methods for the Level Set Approach Pierre A. Gremaud, Christopher M. Kuster, and Zhilin Li October 18, 2005 Abstract The computation of moving curves by the level set method typically
Image warping , , Computational Photography Fall 2017, Lecture 10
 Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Image warping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 10 Course announcements Second make-up lecture on Friday, October 6 th, noon-1:30
Dynamic Programming Algorithms for Planning and Robotics in Continuous Domains and the Hamilton-Jacobi Equation
 Dynamic Programming Algorithms for Planning and Robotics in Continuous Domains and the Hamilton-Jacobi Equation Ian Mitchell Department of Computer Science University of British Columbia research supported
Dynamic Programming Algorithms for Planning and Robotics in Continuous Domains and the Hamilton-Jacobi Equation Ian Mitchell Department of Computer Science University of British Columbia research supported
Implicit Surface Reconstruction from 3D Scattered Points Based on Variational Level Set Method
 Implicit Surface econstruction from D Scattered Points Based on Variational Level Set Method Hanbo Liu Department ofshenzhen graduate school, Harbin Institute oftechnology, Shenzhen, 58055, China liu_hanbo@hit.edu.cn
Implicit Surface econstruction from D Scattered Points Based on Variational Level Set Method Hanbo Liu Department ofshenzhen graduate school, Harbin Institute oftechnology, Shenzhen, 58055, China liu_hanbo@hit.edu.cn
On Semi-implicit Splitting Schemes for the Beltrami Color Flow
 On Semi-implicit Splitting Schemes for the Beltrami Color Flow Lorina Dascal 1, Guy Rosman 1, Xue-Cheng Tai 2,3 and Ron Kimmel 1 1 Department of Computer Science, Technion Israel Institute of Technology,
On Semi-implicit Splitting Schemes for the Beltrami Color Flow Lorina Dascal 1, Guy Rosman 1, Xue-Cheng Tai 2,3 and Ron Kimmel 1 1 Department of Computer Science, Technion Israel Institute of Technology,
CS205b/CME306. Lecture 9
 CS205b/CME306 Lecture 9 1 Convection Supplementary Reading: Osher and Fedkiw, Sections 3.3 and 3.5; Leveque, Sections 6.7, 8.3, 10.2, 10.4. For a reference on Newton polynomial interpolation via divided
CS205b/CME306 Lecture 9 1 Convection Supplementary Reading: Osher and Fedkiw, Sections 3.3 and 3.5; Leveque, Sections 6.7, 8.3, 10.2, 10.4. For a reference on Newton polynomial interpolation via divided
Level-set and ALE Based Topology Optimization Using Nonlinear Programming
 10 th World Congress on Structural and Multidisciplinary Optimization May 19-24, 2013, Orlando, Florida, USA Level-set and ALE Based Topology Optimization Using Nonlinear Programming Shintaro Yamasaki
10 th World Congress on Structural and Multidisciplinary Optimization May 19-24, 2013, Orlando, Florida, USA Level-set and ALE Based Topology Optimization Using Nonlinear Programming Shintaro Yamasaki
Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications
 Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications Per-Olof Persson (persson@mit.edu) Department of Mathematics Massachusetts Institute of Technology http://www.mit.edu/
Unstructured Mesh Generation for Implicit Moving Geometries and Level Set Applications Per-Olof Persson (persson@mit.edu) Department of Mathematics Massachusetts Institute of Technology http://www.mit.edu/
Finding a Closed Boundary by Growing Minimal Paths from a Single Point on 2D or 3D Images
 Finding a Closed Boundary by Growing Minimal Paths from a Single Point on 2D or 3D Images Fethallah Benmansour Stéphane Bonneau Laurent D. Cohen CEREMADE, Université Paris Dauphine benmansour, bonneau,
Finding a Closed Boundary by Growing Minimal Paths from a Single Point on 2D or 3D Images Fethallah Benmansour Stéphane Bonneau Laurent D. Cohen CEREMADE, Université Paris Dauphine benmansour, bonneau,
Topology-Invariant Similarity and Diffusion Geometry
 1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model
 Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Illumination-Robust Face Recognition based on Gabor Feature Face Intrinsic Identity PCA Model TAE IN SEOL*, SUN-TAE CHUNG*, SUNHO KI**, SEONGWON CHO**, YUN-KWANG HONG*** *School of Electronic Engineering
Medical Image Segmentation using Level Sets
 Medical Image Segmentation using Level Sets Technical Report #CS-8-1 Tenn Francis Chen Abstract Segmentation is a vital aspect of medical imaging. It aids in the visualization of medical data and diagnostics
Medical Image Segmentation using Level Sets Technical Report #CS-8-1 Tenn Francis Chen Abstract Segmentation is a vital aspect of medical imaging. It aids in the visualization of medical data and diagnostics
An Active Contour Model without Edges
 An Active Contour Model without Edges Tony Chan and Luminita Vese Department of Mathematics, University of California, Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555 chan,lvese@math.ucla.edu
An Active Contour Model without Edges Tony Chan and Luminita Vese Department of Mathematics, University of California, Los Angeles, 520 Portola Plaza, Los Angeles, CA 90095-1555 chan,lvese@math.ucla.edu
ISSN: X International Journal of Advanced Research in Electronics and Communication Engineering (IJARECE) Volume 6, Issue 8, August 2017
 Volume 6, Issue 8, August 2017") ENTROPY BASED CONSTRAINT METHOD FOR IMAGE SEGMENTATION USING ACTIVE CONTOUR MODEL M.Nirmala Department of ECE JNTUA college of engineering, Anantapuramu Andhra Pradesh,India Abstract: Over the past existing
ENTROPY BASED CONSTRAINT METHOD FOR IMAGE SEGMENTATION USING ACTIVE CONTOUR MODEL M.Nirmala Department of ECE JNTUA college of engineering, Anantapuramu Andhra Pradesh,India Abstract: Over the past existing
Extract Object Boundaries in Noisy Images using Level Set. Literature Survey
 Extract Object Boundaries in Noisy Images using Level Set by: Quming Zhou Literature Survey Submitted to Professor Brian Evans EE381K Multidimensional Digital Signal Processing March 15, 003 Abstract Finding
Extract Object Boundaries in Noisy Images using Level Set by: Quming Zhou Literature Survey Submitted to Professor Brian Evans EE381K Multidimensional Digital Signal Processing March 15, 003 Abstract Finding
Multiphase Dynamic Labeling for Variational Recognition-Driven Image Segmentation
 Multiphase Dynamic Labeling for Variational Recognition-Driven Image Segmentation Daniel Cremers 1, Nir Sochen 2, and Christoph Schnörr 3 1 Department of Computer Science University of California, Los
Multiphase Dynamic Labeling for Variational Recognition-Driven Image Segmentation Daniel Cremers 1, Nir Sochen 2, and Christoph Schnörr 3 1 Department of Computer Science University of California, Los
Two Semi-Lagrangian Fast Methods for Hamilton-Jacobi-Bellman Equations
 Two Semi-Lagrangian Fast Methods for Hamilton-Jacobi-Bellman Equations Simone Cacace 1, Emiliano Cristiani 2(B), and Maurizio Falcone 1 1 Dipartimento di Matematica, Sapienza Università di Roma, Rome,
Two Semi-Lagrangian Fast Methods for Hamilton-Jacobi-Bellman Equations Simone Cacace 1, Emiliano Cristiani 2(B), and Maurizio Falcone 1 1 Dipartimento di Matematica, Sapienza Università di Roma, Rome,
Lambertian model of reflectance I: shape from shading and photometric stereo. Ronen Basri Weizmann Institute of Science
 Lambertian model of reflectance I: shape from shading and photometric stereo Ronen Basri Weizmann Institute of Science Variations due to lighting (and pose) Relief Dumitru Verdianu Flying Pregnant Woman
Lambertian model of reflectance I: shape from shading and photometric stereo Ronen Basri Weizmann Institute of Science Variations due to lighting (and pose) Relief Dumitru Verdianu Flying Pregnant Woman
Assignment #2. (Due date: 11/6/2012)
") Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Computing geodesic paths on manifolds
 Proc. Natl. Acad. Sci. USA Vol. 95, pp. 8431 8435, July 1998 Applied Matematics Computing geodesic pats on manifolds R. Kimmel* and J. A. Setian Department of Matematics and Lawrence Berkeley National
Proc. Natl. Acad. Sci. USA Vol. 95, pp. 8431 8435, July 1998 Applied Matematics Computing geodesic pats on manifolds R. Kimmel* and J. A. Setian Department of Matematics and Lawrence Berkeley National
On reconstruction of non-rigid shapes with intrinsic regularization
 On reconstruction of non-rigid shapes with intrinsic regularization Yohai S. Devir Guy Rosman Alexander M. Bronstein Michael M. Bronstein Ron Kimmel {yd rosman bron mbron ron}@cs.technion.ac.il Department
On reconstruction of non-rigid shapes with intrinsic regularization Yohai S. Devir Guy Rosman Alexander M. Bronstein Michael M. Bronstein Ron Kimmel {yd rosman bron mbron ron}@cs.technion.ac.il Department
Discrete Surfaces. David Gu. Tsinghua University. Tsinghua University. 1 Mathematics Science Center
 Discrete Surfaces 1 1 Mathematics Science Center Tsinghua University Tsinghua University Discrete Surface Discrete Surfaces Acquired using 3D scanner. Discrete Surfaces Our group has developed high speed
Discrete Surfaces 1 1 Mathematics Science Center Tsinghua University Tsinghua University Discrete Surface Discrete Surfaces Acquired using 3D scanner. Discrete Surfaces Our group has developed high speed
Introduction to Computer Graphics. Modeling (3) April 27, 2017 Kenshi Takayama
 April 27, 2017 Kenshi Takayama") Introduction to Computer Graphics Modeling (3) April 27, 2017 Kenshi Takayama Solid modeling 2 Solid models Thin shapes represented by single polygons Unorientable Clear definition of inside & outside
Introduction to Computer Graphics Modeling (3) April 27, 2017 Kenshi Takayama Solid modeling 2 Solid models Thin shapes represented by single polygons Unorientable Clear definition of inside & outside
Numerical Treatment of Geodesic Differential. Equations on a Surface in
 International Mathematical Forum, Vol. 8, 2013, no. 1, 15-29 Numerical Treatment of Geodesic Differential Equations on a Surface in Nassar H. Abdel-All Department of Mathematics, Faculty of Science Assiut
International Mathematical Forum, Vol. 8, 2013, no. 1, 15-29 Numerical Treatment of Geodesic Differential Equations on a Surface in Nassar H. Abdel-All Department of Mathematics, Faculty of Science Assiut
Segmentation Using Active Contour Model and Level Set Method Applied to Medical Images
 Segmentation Using Active Contour Model and Level Set Method Applied to Medical Images Dr. K.Bikshalu R.Srikanth Assistant Professor, Dept. of ECE, KUCE&T, KU, Warangal, Telangana, India kalagaddaashu@gmail.com
Segmentation Using Active Contour Model and Level Set Method Applied to Medical Images Dr. K.Bikshalu R.Srikanth Assistant Professor, Dept. of ECE, KUCE&T, KU, Warangal, Telangana, India kalagaddaashu@gmail.com
Image denoising using TV-Stokes equation with an orientation-matching minimization
 Image denoising using TV-Stokes equation with an orientation-matching minimization Xue-Cheng Tai 1,2, Sofia Borok 1, and Jooyoung Hahn 1 1 Division of Mathematical Sciences, School of Physical Mathematical
Image denoising using TV-Stokes equation with an orientation-matching minimization Xue-Cheng Tai 1,2, Sofia Borok 1, and Jooyoung Hahn 1 1 Division of Mathematical Sciences, School of Physical Mathematical
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates
 COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Measuring Lengths The First Fundamental Form
 Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
THE TASK of unsupervised texture segmentation has been
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 15, NO. 6, JUNE 2006 1633 Integrated Active Contours for Texture Segmentation Chen Sagiv, Nir A. Sochen, and Yehoshua Y. Zeevi Abstract We address the issue
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 15, NO. 6, JUNE 2006 1633 Integrated Active Contours for Texture Segmentation Chen Sagiv, Nir A. Sochen, and Yehoshua Y. Zeevi Abstract We address the issue
Nonoscillatory Central Schemes on Unstructured Triangulations for Hyperbolic Systems of Conservation Laws
 Nonoscillatory Central Schemes on Unstructured Triangulations for Hyperbolic Systems of Conservation Laws Ivan Christov Bojan Popov Department of Mathematics, Texas A&M University, College Station, Texas
Nonoscillatory Central Schemes on Unstructured Triangulations for Hyperbolic Systems of Conservation Laws Ivan Christov Bojan Popov Department of Mathematics, Texas A&M University, College Station, Texas
Estimating normal vectors and curvatures by centroid weights
 Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Consider a problem in which we are given a speed function
 AQ: A AQ: B Fn1 Fast marching methods for the continuous traveling salesman problem June Andrews and J. A. Sethian* Department of Mathematics, University of California, Berkeley, CA 94720 Communicated
AQ: A AQ: B Fn1 Fast marching methods for the continuous traveling salesman problem June Andrews and J. A. Sethian* Department of Mathematics, University of California, Berkeley, CA 94720 Communicated
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
A Machine learning approach for Shape From Shading
 2nd International Conference on Signal, Image, Vision and their Applications (SIVA13) November 18-20, 2013 - Guelma, Algeria. A Machine learning approach for Shape From Shading Lyes ABADA Laboratory of
2nd International Conference on Signal, Image, Vision and their Applications (SIVA13) November 18-20, 2013 - Guelma, Algeria. A Machine learning approach for Shape From Shading Lyes ABADA Laboratory of
Curves and Surfaces. Shireen Elhabian and Aly A. Farag University of Louisville
 Curves and Surfaces Shireen Elhabian and Aly A. Farag University of Louisville February 21 A smile is a curve that sets everything straight Phyllis Diller (American comedienne and actress, born 1917) Outline
Curves and Surfaces Shireen Elhabian and Aly A. Farag University of Louisville February 21 A smile is a curve that sets everything straight Phyllis Diller (American comedienne and actress, born 1917) Outline
Lecture 21: Shading. put your trust in my shadow. Judges 9:15
 Lecture 21: Shading put your trust in my shadow. Judges 9:15 1. Polygonal Models Polygonal models are one of the most common representations for geometry in Computer Graphics. Polygonal models are popular
Lecture 21: Shading put your trust in my shadow. Judges 9:15 1. Polygonal Models Polygonal models are one of the most common representations for geometry in Computer Graphics. Polygonal models are popular
Geodesic Paths on Triangular Meshes
 Geodesic Paths on Triangular Meshes Dimas Martínez Luiz Velho Paulo Cezar Carvalho IMPA Instituto Nacional de Matemática Pura e Aplicada Estrada Dona Castorina, 110, 22460-320 Rio de Janeiro, RJ, Brasil
Geodesic Paths on Triangular Meshes Dimas Martínez Luiz Velho Paulo Cezar Carvalho IMPA Instituto Nacional de Matemática Pura e Aplicada Estrada Dona Castorina, 110, 22460-320 Rio de Janeiro, RJ, Brasil
Generalized barycentric coordinates
 Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
A Primer on Laplacians. Max Wardetzky. Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany
 A Primer on Laplacians Max Wardetzky Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany Warm-up: Euclidean case Warm-up The Euclidean case Chladni s vibrating plates
A Primer on Laplacians Max Wardetzky Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany Warm-up: Euclidean case Warm-up The Euclidean case Chladni s vibrating plates
An introduction to mesh generation Part IV : elliptic meshing
 Elliptic An introduction to mesh generation Part IV : elliptic meshing Department of Civil Engineering, Université catholique de Louvain, Belgium Elliptic Curvilinear Meshes Basic concept A curvilinear
Elliptic An introduction to mesh generation Part IV : elliptic meshing Department of Civil Engineering, Université catholique de Louvain, Belgium Elliptic Curvilinear Meshes Basic concept A curvilinear
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
CS 130 Final. Fall 2015
 CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
CS 130 Final Fall 2015 Name Student ID Signature You may not ask any questions during the test. If you believe that there is something wrong with a question, write down what you think the question is trying
Computer Science 426 Midterm 3/11/04, 1:30PM-2:50PM
 NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS
 PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS Michael Yu Wang 1 and Shengyin Wang 1 Department of Automation and Computer-Aided Engineering The Chinese University of Hong Kong
PARAMETRIC SHAPE AND TOPOLOGY OPTIMIZATION WITH RADIAL BASIS FUNCTIONS Michael Yu Wang 1 and Shengyin Wang 1 Department of Automation and Computer-Aided Engineering The Chinese University of Hong Kong
Ian Mitchell. Department of Computer Science The University of British Columbia
 CPSC 542D: Level Set Methods Dynamic Implicit Surfaces and the Hamilton-Jacobi Equation or What Water Simulation, Robot Path Planning and Aircraft Collision Avoidance Have in Common Ian Mitchell Department
CPSC 542D: Level Set Methods Dynamic Implicit Surfaces and the Hamilton-Jacobi Equation or What Water Simulation, Robot Path Planning and Aircraft Collision Avoidance Have in Common Ian Mitchell Department
Automatic 3D Face Recognition Using Shapes of Facial Curves
 Automatic 3D Face Recognition Using Shapes of Facial Curves Chafik Samir, Anuj Srivastava, and Mohamed Daoudi Abstract In addition to facial textures, manifested in facial images, shapes of facial surfaces
Automatic 3D Face Recognition Using Shapes of Facial Curves Chafik Samir, Anuj Srivastava, and Mohamed Daoudi Abstract In addition to facial textures, manifested in facial images, shapes of facial surfaces
Graphics and Interaction Transformation geometry and homogeneous coordinates
 433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
HIGH DENSITY PLASMA DEPOSITION MODELING USING LEVEL SET METHODS
 HIGH DENSITY PLASMA DEPOSITION MODELING USING LEVEL SET METHODS D. Adalsteinsson J.A. Sethian Dept. of Mathematics University of California, Berkeley 94720 and Juan C. Rey Technology Modeling Associates
HIGH DENSITY PLASMA DEPOSITION MODELING USING LEVEL SET METHODS D. Adalsteinsson J.A. Sethian Dept. of Mathematics University of California, Berkeley 94720 and Juan C. Rey Technology Modeling Associates
APPLICATION OF RADON TRANSFORM IN CT IMAGE MATCHING Yufang Cai, Kuan Shen, Jue Wang ICT Research Center of Chongqing University, Chongqing, P.R.
 APPLICATION OF RADON TRANSFORM IN CT IMAGE MATCHING Yufang Cai, Kuan Shen, Jue Wang ICT Research Center of Chongqing University, Chongqing, P.R.China Abstract: When Industrial Computerized Tomography (CT)
APPLICATION OF RADON TRANSFORM IN CT IMAGE MATCHING Yufang Cai, Kuan Shen, Jue Wang ICT Research Center of Chongqing University, Chongqing, P.R.China Abstract: When Industrial Computerized Tomography (CT)
Lecture 2 Unstructured Mesh Generation
 Lecture 2 Unstructured Mesh Generation MIT 16.930 Advanced Topics in Numerical Methods for Partial Differential Equations Per-Olof Persson (persson@mit.edu) February 13, 2006 1 Mesh Generation Given a
Lecture 2 Unstructured Mesh Generation MIT 16.930 Advanced Topics in Numerical Methods for Partial Differential Equations Per-Olof Persson (persson@mit.edu) February 13, 2006 1 Mesh Generation Given a
Constraint shortest path computation on polyhedral surfaces
 Constraint shortest path computation on polyhedral surfaces Synave Rémi UMR 5800, LaBRI Université Bordeaux 1, France synave@labri.fr Desbarats Pascal UMR 5800, LaBRI Université Bordeaux 1, France desbarats@labri.fr
Constraint shortest path computation on polyhedral surfaces Synave Rémi UMR 5800, LaBRI Université Bordeaux 1, France synave@labri.fr Desbarats Pascal UMR 5800, LaBRI Université Bordeaux 1, France desbarats@labri.fr
THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION
 THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION Dan Englesson danen344@student.liu.se Sunday 12th April, 2011 Abstract In this lab assignment which was done in the course TNM079, Modeling and animation,
THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION Dan Englesson danen344@student.liu.se Sunday 12th April, 2011 Abstract In this lab assignment which was done in the course TNM079, Modeling and animation,
BACK AND FORTH ERROR COMPENSATION AND CORRECTION METHODS FOR REMOVING ERRORS INDUCED BY UNEVEN GRADIENTS OF THE LEVEL SET FUNCTION
 BACK AND FORTH ERROR COMPENSATION AND CORRECTION METHODS FOR REMOVING ERRORS INDUCED BY UNEVEN GRADIENTS OF THE LEVEL SET FUNCTION TODD F. DUPONT AND YINGJIE LIU Abstract. We propose a method that significantly
BACK AND FORTH ERROR COMPENSATION AND CORRECTION METHODS FOR REMOVING ERRORS INDUCED BY UNEVEN GRADIENTS OF THE LEVEL SET FUNCTION TODD F. DUPONT AND YINGJIE LIU Abstract. We propose a method that significantly
Outline. Level Set Methods. For Inverse Obstacle Problems 4. Introduction. Introduction. Martin Burger
 For Inverse Obstacle Problems Martin Burger Outline Introduction Optimal Geometries Inverse Obstacle Problems & Shape Optimization Sensitivity Analysis based on Gradient Flows Numerical Methods University
For Inverse Obstacle Problems Martin Burger Outline Introduction Optimal Geometries Inverse Obstacle Problems & Shape Optimization Sensitivity Analysis based on Gradient Flows Numerical Methods University
ECE 600, Dr. Farag, Summer 09
 ECE 6 Summer29 Course Supplements. Lecture 4 Curves and Surfaces Aly A. Farag University of Louisville Acknowledgements: Help with these slides were provided by Shireen Elhabian A smile is a curve that
ECE 6 Summer29 Course Supplements. Lecture 4 Curves and Surfaces Aly A. Farag University of Louisville Acknowledgements: Help with these slides were provided by Shireen Elhabian A smile is a curve that
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Tubular Anisotropy Segmentation
 Tubular Anisotropy Segmentation Fethallah Benmansour Laurent D. Cohen CEREMADE, UMR CNRS 7534, Université Paris Dauphine Place du Maréchal De Lattre De Tassigny, 75775 PARIS CEDEX 16 - FRANCE benmansour,
Tubular Anisotropy Segmentation Fethallah Benmansour Laurent D. Cohen CEREMADE, UMR CNRS 7534, Université Paris Dauphine Place du Maréchal De Lattre De Tassigny, 75775 PARIS CEDEX 16 - FRANCE benmansour,
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character