Def De orma f tion orma Disney/Pixar
|
|
|
- Erik Scott
- 6 years ago
- Views:
Transcription
1 Deformation Disney/Pixar







2 Deformation 2





3 Motivation Easy modeling generate new shapes by deforming existing ones 3




4 Motivation Easy modeling generate new shapes by deforming existing ones 4



5 Motivation Character posing for animation 5



6 Challenges User says as little as possible algorithm deduces the rest 6






7 Challenges Intuitive deformation global change + local detail preservation 7


8 Challenges Intuitive deformation global change + local detail preservation 8
9 Challenges Efficient! 9
10 Rules of the Game Shape Deformation Algorithm Deformed Shape Constraints Position: Orientation/Scale: Other shape property: This point goes there The environment of this Curvature, perimeter, point should rotate/scale [ Parameterization is also deformation : constraints = curvature 0 everywhere ] 10
11 Approaches Surface deformation Shape is empty shell Curve for 2D deformation Surface for 3D deformation Deformation only defined on shape Deformation coupled with shape representation 11


12 Approaches Space deformation Shape is volumetric Planar domain in 2D Polyhedral domain in 3D Deformation defined in neighborhood of shape Can be applied to any shape representation 12
13 Approaches Surface deformation Find alternative representation which is deformation invariant Space deformation Find a space map which has nice properties 13
 Given S find S such that")
 An optimization problem S R R1 R2")
14 Surface Deformation Setup: Choose alternative representation f(s) Given S find S such that Constraints(S )aretrue are true f(s ) = f(s) (or close) An optimization problem S R R1 R2 R3 14
15 Shape Representation How good is the representation? ese Representation should always be invariant to: Global translation Global rotation Global scale? Depends on application Shapes we want reachable should have similar representations Almost isometric deformation local translation + rotation Almost conformal deformation local translation + rotation + scale 15
16 Shape Representation Robustness How hard is it to solve the optimization problem? Can we find the global minimum? Small change in constraints similar shape? Efficiency Can it be solved at interactive rates? 16
17 Shape Representations Rule of thumb: If representation is a linear function of the coordinates, deformation is: Robust Fast But representation is not rotation invariant! (for large rotations) 17
18 Surface Representations Laplacian coordinates Edge lengths + dihedral angles Pyramid coordinates Local frames. 18
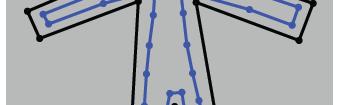
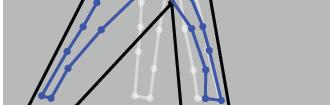
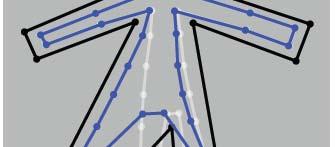
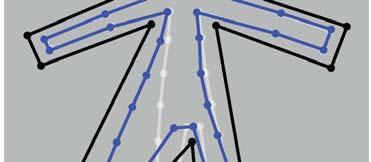
19 Laplacian Coordinates [Sorkine et al. 04] Control mechanism Handles (vertices) moved by user Region of influence (ROI) Movie 19
20 Laplacian Coordinates δ = LV = (I-D -1 A)V I = Identity matrix D = Diagonal matrix [d ii = deg(v i )] A = Adjacency matrix V = Vertices in mesh Approximation to normals - unique up to translation Reconstruct by solving LV = δ for V, with one constraint Poisson equation 20
21 Deformation Pose modeling constraints for vertices C V v i = u i i C No exact solution, minimize error Laplacian Laplacian User Constraints coordinates of coordinates of original mesh deformed mesh 21
22 Deformation Laplacian Laplacian User Constraints coordinates of coordinates of original mesh deformed mesh 22
23 Linear Least Squares Ax = b with m equations, n unknowns Normal equations: (A T A)x = A T b Solution by pseudo inverse: x = A + b= [(A T A) -1 A T ]b If system under determined: x = arg min { x : Ax = b } If system over determined: x = arg min { Ax-b 2 } 23
24 Laplacian Coordinates Sanity Check Translation invariant? Rotation/scale invariant? δ i δ i δ i 24










25 Problem 25
26 input Laplacian coords Rotation invariant coords 26
27 Rotation Invariant Coords The representation should take into account local rotations + scale δ i =L(v i ) T i δ i =L(v i ) v i v' i δ i δ i T i δ i δ i 27
28 Rotation Invariant Coords The representation should take into account local rotations + scale δ i =L(v i ) T i δ i =L(v i ) Problem: T i depends on deformed position v i 28
29 Solution: Implicit Transformations Idea: solve for local transformation and deformed surface simultaneously Transformation of the local frame 29
30 Similarities Restrict T i to good transformations = rotation + scale similarity transformation Similarity Transformation 30
31 Similarities Conditions on T i to be a similarity matrix? Linear in 2D: Auxiliary variables Uniform Rotation + scale translation 31
32 Similarities 2D 32
33 Similarities 3D case Not linear in 3D: Linearize by dropping the quadratic term Effectively: only small rotations are handled 33
34 Laplacian Coordinates Realtime? Need to solve a linear system each frame (A T A)x ) = A T b Precompute sparse Cholesky factorization Only back substitution per frame 34










35 Some Results 35
36 Some Results 36
37 Limitations: Large Rotations 37
38 How to Find the Rotations? Laplacian coordinates solve for them Problem: not linear Another approach: propagate rotations from handles 38

39 Rotation Propagation Compute handle s deformation gradient Extract rotation and scale/shear components Propagate damped d rotations over ROI 39

40 Deformation Gradient Handle has been transformed affinely Deformation gradient is: Extract rotation R and scale/shear S 40
41 Smooth Propagation Construct smooth scalar field [0,1] α(x)=1 Full deformation (handle) α(x)=0( ) 0 No deformation (fixed part) α(x) [0,1] Damp transformation (in between) Linearly damp scale/shear: S(x)= ( ) α(x)s(handle) ( ) ( ) Log scale damp rotation: R(x) ( ) = exp(α(x)log(r(handle)) ( ( )) 41
42 Limitations Works well for rotations Translations don t change deformation gradient Translation insensitivity 42
43 The Curse of Rotations Can t solve for them directly using a linear system Can t propagate if the handles don t rotate Some linear methods work for rotations Some work for translations None work for both 43


44 The Curse of Rotations Non linear methods work for both large rotations and translation only No free lunch: much more expensive 44
45 Space Deformation Deformation function on ambient space f : n n Shape S deformed by applying f to points of S S = f (S) f (x,y)=(2x,y) S S 45
46 Motivation Can be applied to any geometry Meshes (= non-manifold, multiple components) Polygon soups Point clouds Volumetric data Complexity decoupled from geometry complexity Can pick the best complexity for required deformation 46
47 Required Properties Invariant to global operators Global translation Global rotation Smooth Efficient to compute Intuitive deformation? Can pose constraints as in surface deformation 47

![06] p i p i 1.](/docs-images/75/71667990/images/48-1.jpg "Handles p i 2.")


48 MLS Deformation [Schaeffer et al. 06] p i p i 1. Handles p i 2. Target locations 3. Find best affine transformation that maps p i to 4. Deform f (v) = Mv+T 48


49 MLS Deformation [Schaeffer et al. 06] p i p i 1. Handles p i 2. Target locations 3. Find best affine transformation that maps p i to 4. Deform f (v) = Mv+T Closed form solution 49
50 Similarity Affine Transformations? Shears! 50



 = Mv+T")
51 Similarity Transformations p i p i 1. Handles p i 2. Target locations 3. Find best similarity transformation that maps p i to 4. Deform f (v) = Mv+T Closed form solution 51
52 Rigid Similarity Transformations? Scales! 52

 = Mv+T Closed form")
53 Rigid Transformations p i p i 1. Handles p i 2. Target locations 3. Find best rigid transformation that maps p i to 4. Deform f (v) = Mv+T Closed form solution given best similarity 53
54 Comparison Thin-Plate [Bookstein 89] Affine MLS Similarity MLS Rigid MLS 54






55 Examples Before After 55
56 Examples Horse Giraffe 56






57 Limitations Deforms all space - is not shape aware 57
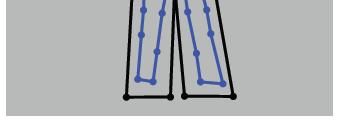
58 The Pants Problem Small Euclidean distance Large geodesic distance 58
59 The Pants Problem Don t care about distortion outside the shape p 59
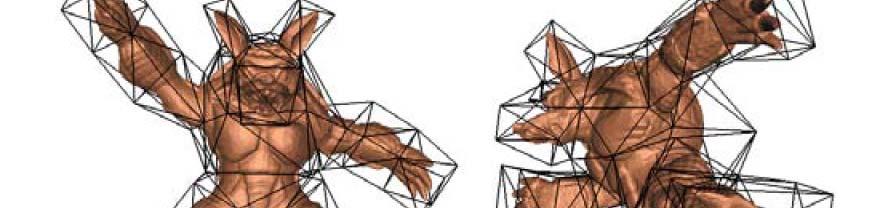
60 Solution: Cages Enclose the shape in a cage Ω n Deformation function defined only on cage Ω f : Ω n New problem: how to build the cage? 60





61 Deformation with a Cage x g(x) i x f i S F S ={x 1,xx 2,...,xx n } x i f i Source polygon Target polygon g(x) =? Interior? 61
62 Barycentric Coordinates f i x i x S F wx () i x i x w i (x) : Ω n Barycentric Coords Function 62
 i x")
 = w ( x) f x i= 1 x")
63 Barycentric Coordinates x g(x) i x f i S F 63 wx () i g ( x) = w ( x) f x i= 1 x i n F i i
")


64 Example x i w i (x) 64


65 Example 65



 x i x f")
66 Barycentric Coordinates Required properties Translation invariance (constant precision) x i x f i Reproduction of identity (linear precision) g(x) 66
67 Barycentric Coordinates Constant + linear precision = affine invariance g ( x) = w( x)( Ax T) Ax + T + i i i i = A w ( x ) x + T w ( x ) = i i i i i x 1 = Ax+ T 67
68 Barycentric Coordinates Required properties Smoothness at least C1 x i x Interpolation (Lagrange property) f i g(x) 68

![05] k ( x ) i = α α](/docs-images/75/71667990/images/69-1.jpg "i 1 i tan tan + 2 2")
 i k (")

69 Example: Mean Value Coords [3D: Ju et al 05] k ( x ) i = α α i 1 i tan tan x x i x x i+1 α i α i-1 x i w( x) i k ( x ) x i = i-1 k ( x) i i Closed form! 69


70 Example: Mean Value Coords 70


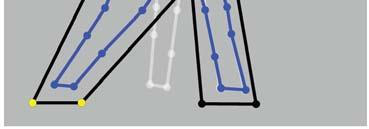
71 MV - Limitations Back to the pants problem MV negative on concave polygons 71




72 MV - Limitations Other leg moves in opposite (!) direction 72
73 Barycentric Coords Additional property required: w( x) 0 Mean value coords only positive on convex polygons i 73

![[Joshi et al 07] subject](/docs-images/75/71667990/images/74-2.jpg "to: w i linear on the")
74 Solve for w i (x): Harmonic Coordinates [Joshi et al 07] subject to: w i linear on the boundary and 74


75 Harmonic Coordinates MVC HC 75
76 Harmonic Coordinates MVC HC 76
77 Harmonic Coordinates Why does it work? MVC use Euclidean distances HC use resistance distances 77
78 Harmonic Coordinates Properties: All required properties Smooth, translation + rotation invariant Positive everywhere No closed form, need to solve a PDE 78
79 References On Linear Variational Surface Deformation Methods [Botsch & Sorkine 08] Tutorial: Interactive Shape Modeling and Deformation [Sorkine & Botsch 09] Image deformation using moving least squares [Schaefer et al 06] Mean Value Coordinates for Closed Triangular Meshes [Ju et al 05] Harmonic coordinates for character articulation [Joshi et al 07] Excellent webpage on barycentric coordinates: 79
Easy modeling generate new shapes by deforming existing ones
 Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Deformation II. Disney/Pixar
 Deformation II Disney/Pixar 1 Space Deformation Deformation function on ambient space f : n n Shape S deformed by applying f to points of S S = f (S) f (x,y)=(2x,y) S S 2 Motivation Can be applied to any
Deformation II Disney/Pixar 1 Space Deformation Deformation function on ambient space f : n n Shape S deformed by applying f to points of S S = f (S) f (x,y)=(2x,y) S S 2 Motivation Can be applied to any
12 - Spatial And Skeletal Deformations. CSCI-GA Computer Graphics - Fall 16 - Daniele Panozzo
 12 - Spatial And Skeletal Deformations Space Deformations Space Deformation Displacement function defined on the ambient space Evaluate the function on the points of the shape embedded in the space Twist
12 - Spatial And Skeletal Deformations Space Deformations Space Deformation Displacement function defined on the ambient space Evaluate the function on the points of the shape embedded in the space Twist
CSE 554 Lecture 7: Deformation II
 CSE 554 Lecture 7: Deformation II Fall 2011 CSE554 Deformation II Slide 1 Review Rigid-body alignment Non-rigid deformation Intrinsic methods: deforming the boundary points An optimization problem Minimize
CSE 554 Lecture 7: Deformation II Fall 2011 CSE554 Deformation II Slide 1 Review Rigid-body alignment Non-rigid deformation Intrinsic methods: deforming the boundary points An optimization problem Minimize
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Parameterization of Meshes
 2-Manifold Parameterization of Meshes What makes for a smooth manifold? locally looks like Euclidian space collection of charts mutually compatible on their overlaps form an atlas Parameterizations are
2-Manifold Parameterization of Meshes What makes for a smooth manifold? locally looks like Euclidian space collection of charts mutually compatible on their overlaps form an atlas Parameterizations are
Computational Design. Stelian Coros
 Computational Design Stelian Coros Schedule for presentations February 3 5 10 12 17 19 24 26 March 3 5 10 12 17 19 24 26 30 April 2 7 9 14 16 21 23 28 30 Send me: ASAP: 3 choices for dates + approximate
Computational Design Stelian Coros Schedule for presentations February 3 5 10 12 17 19 24 26 March 3 5 10 12 17 19 24 26 30 April 2 7 9 14 16 21 23 28 30 Send me: ASAP: 3 choices for dates + approximate
Surface Parameterization
 Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Real-Time Shape Editing using Radial Basis Functions
 Real-Time Shape Editing using Radial Basis Functions, Leif Kobbelt RWTH Aachen Boundary Constraint Modeling Prescribe irregular constraints Vertex positions Constrained energy minimization Optimal fairness
Real-Time Shape Editing using Radial Basis Functions, Leif Kobbelt RWTH Aachen Boundary Constraint Modeling Prescribe irregular constraints Vertex positions Constrained energy minimization Optimal fairness
Digital Geometry Processing Parameterization I
 Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Problem Definition Given a surface (mesh) S in R 3 and a domain find a bective F: S Typical Domains Cutting to a Disk disk = genus zero + boundary sphere = closed genus zero Creates artificial boundary
Generalized barycentric coordinates
 Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
Generalized barycentric coordinates Michael S. Floater August 20, 2012 In this lecture, we review the definitions and properties of barycentric coordinates on triangles, and study generalizations to convex,
Yaron Lipman Thomas Funkhouser. RifR Raif Rustamov. Princeton University. Drew University
 Barycentric Coordinates on Surfaces Yaron Lipman Thomas Funkhouser RifR Raif Rustamov Princeton University Drew University Motivation Barycentric coordinates good for: interpolation shading deformation
Barycentric Coordinates on Surfaces Yaron Lipman Thomas Funkhouser RifR Raif Rustamov Princeton University Drew University Motivation Barycentric coordinates good for: interpolation shading deformation
Skeleton Based As-Rigid-As-Possible Volume Modeling
 Skeleton Based As-Rigid-As-Possible Volume Modeling Computer Science Department, Rutgers University As-rigid-as-possible (ARAP) shape modeling is a popular technique to obtain natural deformations. There
Skeleton Based As-Rigid-As-Possible Volume Modeling Computer Science Department, Rutgers University As-rigid-as-possible (ARAP) shape modeling is a popular technique to obtain natural deformations. There
Large Mesh Deformation Using the Volumetric Graph Laplacian
 Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
CSE452 Computer Graphics
 CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
CSE452 Computer Graphics Lecture 19: From Morphing To Animation Capturing and Animating Skin Deformation in Human Motion, Park and Hodgins, SIGGRAPH 2006 CSE452 Lecture 19: From Morphing to Animation 1
10 - ARAP and Linear Blend Skinning
 10 - ARAP and Linear Blend Skinning Acknowledgements: Olga Sorkine-Hornung As Rigid As Possible Demo Libigl demo 405 As-Rigid-As-Possible Deformation Preserve shape of cells covering the surface Ask each
10 - ARAP and Linear Blend Skinning Acknowledgements: Olga Sorkine-Hornung As Rigid As Possible Demo Libigl demo 405 As-Rigid-As-Possible Deformation Preserve shape of cells covering the surface Ask each
Local Barycentric Coordinates
 Local Barycentric Coordinates Juyong Zhang Bailin Deng Zishun Liu Giuseppe Patanè Sofien Bouaziz Kai Hormann Ligang Liu USTC EPFL USTC CNR-IMATI EPFL USI USTC Introduction Given a point p inside a polygon
Local Barycentric Coordinates Juyong Zhang Bailin Deng Zishun Liu Giuseppe Patanè Sofien Bouaziz Kai Hormann Ligang Liu USTC EPFL USTC CNR-IMATI EPFL USI USTC Introduction Given a point p inside a polygon
Parameterization of triangular meshes
 Parameterization of triangular meshes Michael S. Floater November 10, 2009 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to
Parameterization of triangular meshes Michael S. Floater November 10, 2009 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to
Parameterization. Michael S. Floater. November 10, 2011
 Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
Parameterization Michael S. Floater November 10, 2011 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to generate from point
THIS paper presents the recent advances in mesh deformation
 1 On Linear Variational Surface Deformation Methods Mario Botsch Computer Graphics Laboratory ETH Zurich Olga Sorkine Computer Graphics Group TU Berlin Abstract This survey reviews the recent advances
1 On Linear Variational Surface Deformation Methods Mario Botsch Computer Graphics Laboratory ETH Zurich Olga Sorkine Computer Graphics Group TU Berlin Abstract This survey reviews the recent advances
An Intuitive Framework for Real-Time Freeform Modeling
 An Intuitive Framework for Real-Time Freeform Modeling Leif Kobbelt Shape Deformation Complex shapes Complex deformations User Interaction Very limited user interface 2D screen & mouse Intuitive metaphor
An Intuitive Framework for Real-Time Freeform Modeling Leif Kobbelt Shape Deformation Complex shapes Complex deformations User Interaction Very limited user interface 2D screen & mouse Intuitive metaphor
Laplacian Meshes. COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman
 Laplacian Meshes COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman Outline Differential surface representation Ideas and applications Compact shape representation Mesh editing and manipulation
Laplacian Meshes COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman Outline Differential surface representation Ideas and applications Compact shape representation Mesh editing and manipulation
Kai Hormann, N. Sukumar. Generalized Barycentric Coordinates in Computer Graphics and Computational Mechanics
 Kai Hormann, N. Sukumar Generalized Barycentric Coordinates in Computer Graphics and Computational Mechanics Contents Chapter 1 Multi-Sided Patches via Barycentric Coordinates 1 Scott Schaefer 1.1 INTRODUCTION
Kai Hormann, N. Sukumar Generalized Barycentric Coordinates in Computer Graphics and Computational Mechanics Contents Chapter 1 Multi-Sided Patches via Barycentric Coordinates 1 Scott Schaefer 1.1 INTRODUCTION
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Comparison and affine combination of generalized barycentric coordinates for convex polygons
 Annales Mathematicae et Informaticae 47 (2017) pp. 185 200 http://ami.uni-eszterhazy.hu Comparison and affine combination of generalized barycentric coordinates for convex polygons Ákos Tóth Department
Annales Mathematicae et Informaticae 47 (2017) pp. 185 200 http://ami.uni-eszterhazy.hu Comparison and affine combination of generalized barycentric coordinates for convex polygons Ákos Tóth Department
Assignment 4: Mesh Parametrization
 CSCI-GA.3033-018 - Geometric Modeling Assignment 4: Mesh Parametrization In this exercise you will Familiarize yourself with vector field design on surfaces. Create scalar fields whose gradients align
CSCI-GA.3033-018 - Geometric Modeling Assignment 4: Mesh Parametrization In this exercise you will Familiarize yourself with vector field design on surfaces. Create scalar fields whose gradients align
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
Meshless Modeling, Animating, and Simulating Point-Based Geometry
 Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Meshless Modeling, Animating, and Simulating Point-Based Geometry Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Graphics Primitives - Points The emergence of points
Deformation Transfer for Detail-Preserving Surface Editing
 Deformation Transfer for Detail-Preserving Surface Editing Mario Botsch Robert W Sumner 2 Mark Pauly 2 Markus Gross Computer Graphics Laboratory, ETH Zurich 2 Applied Geometry Group, ETH Zurich Abstract
Deformation Transfer for Detail-Preserving Surface Editing Mario Botsch Robert W Sumner 2 Mark Pauly 2 Markus Gross Computer Graphics Laboratory, ETH Zurich 2 Applied Geometry Group, ETH Zurich Abstract
Mesh-Based Inverse Kinematics
 CS468, Wed Nov 9 th 2005 Mesh-Based Inverse Kinematics R. W. Sumner, M. Zwicker, C. Gotsman, J. Popović SIGGRAPH 2005 The problem 1 General approach Learn from experience... 2 As-rigid-as-possible shape
CS468, Wed Nov 9 th 2005 Mesh-Based Inverse Kinematics R. W. Sumner, M. Zwicker, C. Gotsman, J. Popović SIGGRAPH 2005 The problem 1 General approach Learn from experience... 2 As-rigid-as-possible shape
Animation. Motion over time
 Animation Animation Motion over time Animation Motion over time Usually focus on character animation but environment is often also animated trees, water, fire, explosions, Animation Motion over time Usually
Animation Animation Motion over time Animation Motion over time Usually focus on character animation but environment is often also animated trees, water, fire, explosions, Animation Motion over time Usually
Guidelines for proper use of Plate elements
 Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Guidelines for proper use of Plate elements In structural analysis using finite element method, the analysis model is created by dividing the entire structure into finite elements. This procedure is known
Geodesics in heat: A new approach to computing distance
 Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Advanced Computer Graphics
 G22.2274 001, Fall 2010 Advanced Computer Graphics Project details and tools 1 Projects Details of each project are on the website under Projects Please review all the projects and come see me if you would
G22.2274 001, Fall 2010 Advanced Computer Graphics Project details and tools 1 Projects Details of each project are on the website under Projects Please review all the projects and come see me if you would
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Parameterization of Triangular Meshes with Virtual Boundaries
 Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
Parameterization of Triangular Meshes with Virtual Boundaries Yunjin Lee 1;Λ Hyoung Seok Kim 2;y Seungyong Lee 1;z 1 Department of Computer Science and Engineering Pohang University of Science and Technology
2D Shape Deformation Using Nonlinear Least Squares Optimization
 2D Shape Deformation Using Nonlinear Least Squares Optimization Paper ID: 20 Abstract This paper presents a novel 2D shape deformation algorithm based on nonlinear least squares optimization. The algorithm
2D Shape Deformation Using Nonlinear Least Squares Optimization Paper ID: 20 Abstract This paper presents a novel 2D shape deformation algorithm based on nonlinear least squares optimization. The algorithm
Geometric modeling 1
 Geometric Modeling 1 Look around the room. To make a 3D model of a room requires modeling every single object you can see. Leaving out smaller objects (clutter) makes the room seem sterile and unrealistic
Geometric Modeling 1 Look around the room. To make a 3D model of a room requires modeling every single object you can see. Leaving out smaller objects (clutter) makes the room seem sterile and unrealistic
Advanced Computer Graphics
 G22.2274 001, Fall 2009 Advanced Computer Graphics Project details and tools 1 Project Topics Computer Animation Geometric Modeling Computational Photography Image processing 2 Optimization All projects
G22.2274 001, Fall 2009 Advanced Computer Graphics Project details and tools 1 Project Topics Computer Animation Geometric Modeling Computational Photography Image processing 2 Optimization All projects
Mesh Processing Pipeline
 Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Animation. CS 4620 Lecture 32. Cornell CS4620 Fall Kavita Bala
 Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
Animation CS 4620 Lecture 32 Cornell CS4620 Fall 2015 1 What is animation? Modeling = specifying shape using all the tools we ve seen: hierarchies, meshes, curved surfaces Animation = specifying shape
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces.
 weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Skeletal deformation
 CS 523: Computer Graphics, Spring 2009 Shape Modeling Skeletal deformation 4/22/2009 1 Believable character animation Computers games and movies Skeleton: intuitive, low dimensional subspace Clip courtesy
CS 523: Computer Graphics, Spring 2009 Shape Modeling Skeletal deformation 4/22/2009 1 Believable character animation Computers games and movies Skeleton: intuitive, low dimensional subspace Clip courtesy
Introduction to Computer Graphics. Modeling (3) April 27, 2017 Kenshi Takayama
 April 27, 2017 Kenshi Takayama") Introduction to Computer Graphics Modeling (3) April 27, 2017 Kenshi Takayama Solid modeling 2 Solid models Thin shapes represented by single polygons Unorientable Clear definition of inside & outside
Introduction to Computer Graphics Modeling (3) April 27, 2017 Kenshi Takayama Solid modeling 2 Solid models Thin shapes represented by single polygons Unorientable Clear definition of inside & outside
Animation. Keyframe animation. CS4620/5620: Lecture 30. Rigid motion: the simplest deformation. Controlling shape for animation
 Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Keyframe animation CS4620/5620: Lecture 30 Animation Keyframing is the technique used for pose-to-pose animation User creates key poses just enough to indicate what the motion is supposed to be Interpolate
Parallel Computation of Spherical Parameterizations for Mesh Analysis. Th. Athanasiadis and I. Fudos University of Ioannina, Greece
 Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Bounded Distortion Mapping and Shape Deformation
 Bounded Distortion Mapping and Shape Deformation 陈仁杰 德国马克斯普朗克计算机研究所 GAMES Web Seminar, 29 March 2018 Outline Planar Mapping & Applications Bounded Distortion Mapping Harmonic Shape Deformation Shape Interpolation
Bounded Distortion Mapping and Shape Deformation 陈仁杰 德国马克斯普朗克计算机研究所 GAMES Web Seminar, 29 March 2018 Outline Planar Mapping & Applications Bounded Distortion Mapping Harmonic Shape Deformation Shape Interpolation
Geometric Registration for Deformable Shapes 2.2 Deformable Registration
 Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Introduction to Computer Graphics. Image Processing (1) June 8, 2017 Kenshi Takayama
 June 8, 2017 Kenshi Takayama") Introduction to Computer Graphics Image Processing (1) June 8, 2017 Kenshi Takayama Today s topics Edge-aware image processing Gradient-domain image processing 2 Image smoothing using Gaussian Filter Smoothness
Introduction to Computer Graphics Image Processing (1) June 8, 2017 Kenshi Takayama Today s topics Edge-aware image processing Gradient-domain image processing 2 Image smoothing using Gaussian Filter Smoothness
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Invariant shape similarity. Invariant shape similarity. Invariant similarity. Equivalence. Equivalence. Equivalence. Equal SIMILARITY TRANSFORMATION
 1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
TNM079 Modeling & Animation Lecture 6 (Implicit surfaces)
") TNM079 Modeling & Animation Lecture 6 (Implicit surfaces) Mark Eric Dieckmann, Media and Information Technology, ITN Linköpings universitet Campus Norrköping SE-60174 Norrköping May 4, 2016 Content of
TNM079 Modeling & Animation Lecture 6 (Implicit surfaces) Mark Eric Dieckmann, Media and Information Technology, ITN Linköpings universitet Campus Norrköping SE-60174 Norrköping May 4, 2016 Content of
Discrete Geometry Processing
 Non Convex Boundary Convex boundary creates significant distortion Free boundary is better Some slides from the Mesh Parameterization Course (Siggraph Asia 008) 1 Fixed vs Free Boundary Fixed vs Free Boundary
Non Convex Boundary Convex boundary creates significant distortion Free boundary is better Some slides from the Mesh Parameterization Course (Siggraph Asia 008) 1 Fixed vs Free Boundary Fixed vs Free Boundary
CS 523: Computer Graphics, Spring Shape Modeling. Skeletal deformation. Andrew Nealen, Rutgers, /12/2011 1
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Skeletal deformation 4/12/2011 1 Believable character animation Computers games and movies Skeleton: intuitive, low-dimensional subspace Clip courtesy
CS 523: Computer Graphics, Spring 2011 Shape Modeling Skeletal deformation 4/12/2011 1 Believable character animation Computers games and movies Skeleton: intuitive, low-dimensional subspace Clip courtesy
3D Modeling Parametric Curves & Surfaces. Shandong University Spring 2013
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2013 3D Object Representations Raw data Point cloud Range image Polygon soup Surfaces Mesh Subdivision Parametric Implicit Solids Voxels
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Generalized Barycentric Coordinates
 Generalized Barycentric Coordinates Kai Hormann Faculty of Informatics Università della Svizzera italiana, Lugano My life in a nutshell 2009??? Associate Professor @ University of Lugano 1 Generalized
Generalized Barycentric Coordinates Kai Hormann Faculty of Informatics Università della Svizzera italiana, Lugano My life in a nutshell 2009??? Associate Professor @ University of Lugano 1 Generalized
Mesh Morphing. Ligang Liu Graphics&Geometric Computing Lab USTC
 Mesh Morphing Ligang Liu Graphics&Geometric Computing Lab USTC http://staff.ustc.edu.cn/~lgliu Morphing Given two objects produce sequence of intermediate objects that gradually evolve from one object
Mesh Morphing Ligang Liu Graphics&Geometric Computing Lab USTC http://staff.ustc.edu.cn/~lgliu Morphing Given two objects produce sequence of intermediate objects that gradually evolve from one object
Möbius Transformations in Scientific Computing. David Eppstein
 Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Möbius Transformations in Scientific Computing David Eppstein Univ. of California, Irvine School of Information and Computer Science (including joint work with Marshall Bern from WADS 01 and SODA 03) Outline
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS
 GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
GEOMETRIC TOOLS FOR COMPUTER GRAPHICS PHILIP J. SCHNEIDER DAVID H. EBERLY MORGAN KAUFMANN PUBLISHERS A N I M P R I N T O F E L S E V I E R S C I E N C E A M S T E R D A M B O S T O N L O N D O N N E W
Barycentric Coordinates and Parameterization
 Barycentric Coordinates and Parameterization Center of Mass Geometric center of object Center of Mass Geometric center of object Object can be balanced on CoM How to calculate? Finding the Center of Mass
Barycentric Coordinates and Parameterization Center of Mass Geometric center of object Center of Mass Geometric center of object Object can be balanced on CoM How to calculate? Finding the Center of Mass
Module: 2 Finite Element Formulation Techniques Lecture 3: Finite Element Method: Displacement Approach
 11 Module: 2 Finite Element Formulation Techniques Lecture 3: Finite Element Method: Displacement Approach 2.3.1 Choice of Displacement Function Displacement function is the beginning point for the structural
11 Module: 2 Finite Element Formulation Techniques Lecture 3: Finite Element Method: Displacement Approach 2.3.1 Choice of Displacement Function Displacement function is the beginning point for the structural
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]
![Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]](/thumbs/93/111713975.jpg "Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder]") Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Differential Geometry: Circle Patterns (Part 1) [Discrete Conformal Mappinngs via Circle Patterns. Kharevych, Springborn and Schröder] Preliminaries Recall: Given a smooth function f:r R, the function
Lecture 2 Unstructured Mesh Generation
 Lecture 2 Unstructured Mesh Generation MIT 16.930 Advanced Topics in Numerical Methods for Partial Differential Equations Per-Olof Persson (persson@mit.edu) February 13, 2006 1 Mesh Generation Given a
Lecture 2 Unstructured Mesh Generation MIT 16.930 Advanced Topics in Numerical Methods for Partial Differential Equations Per-Olof Persson (persson@mit.edu) February 13, 2006 1 Mesh Generation Given a
Assignment 5: Shape Deformation
 CSCI-GA.3033-018 - Geometric Modeling Assignment 5: Shape Deformation Goal of this exercise In this exercise, you will implement an algorithm to interactively deform 3D models. You will construct a two-level
CSCI-GA.3033-018 - Geometric Modeling Assignment 5: Shape Deformation Goal of this exercise In this exercise, you will implement an algorithm to interactively deform 3D models. You will construct a two-level
Simple Formulas for Quasiconformal Plane Deformations
 Simple Formulas for Quasiconformal Plane Deformations by Yaron Lipman, Vladimir Kim, and Thomas Funkhouser ACM TOG 212 Stephen Mann Planar Shape Deformations Used in Mesh parameterization Animation shape
Simple Formulas for Quasiconformal Plane Deformations by Yaron Lipman, Vladimir Kim, and Thomas Funkhouser ACM TOG 212 Stephen Mann Planar Shape Deformations Used in Mesh parameterization Animation shape
Cross-Parameterization and Compatible Remeshing of 3D Models
 Cross-Parameterization and Compatible Remeshing of 3D Models Vladislav Kraevoy Alla Sheffer University of British Columbia Authors Vladislav Kraevoy Ph.D. Student Alla Sheffer Assistant Professor Outline
Cross-Parameterization and Compatible Remeshing of 3D Models Vladislav Kraevoy Alla Sheffer University of British Columbia Authors Vladislav Kraevoy Ph.D. Student Alla Sheffer Assistant Professor Outline
Animation of 3D surfaces
 Animation of 3D surfaces 2013-14 Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible
Animation of 3D surfaces 2013-14 Motivations When character animation is controlled by skeleton set of hierarchical joints joints oriented by rotations the character shape still needs to be visible: visible
1.7.1 Laplacian Smoothing
 1.7.1 Laplacian Smoothing 320491: Advanced Graphics - Chapter 1 434 Theory Minimize energy functional total curvature estimate by polynomial-fitting non-linear (very slow!) 320491: Advanced Graphics -
1.7.1 Laplacian Smoothing 320491: Advanced Graphics - Chapter 1 434 Theory Minimize energy functional total curvature estimate by polynomial-fitting non-linear (very slow!) 320491: Advanced Graphics -
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Fast marching methods
 1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
3D Modeling Parametric Curves & Surfaces
 3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
3D Modeling Parametric Curves & Surfaces Shandong University Spring 2012 3D Object Representations Raw data Point cloud Range image Polygon soup Solids Voxels BSP tree CSG Sweep Surfaces Mesh Subdivision
Animations. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Kavita Bala
 Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Animations Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Kavita Bala Animation Artistic process What are animators trying to do? What tools
Geometry Processing & Geometric Queries. Computer Graphics CMU /15-662
 Geometry Processing & Geometric Queries Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans,
Geometry Processing & Geometric Queries Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans,
Project-II: Comparing Mean Value, Harmonic and Green Coordinates for Mesh Deformation in Computer Animation
 Project-II: Comparing Mean Value, Harmonic and Green Coordinates for Mesh Deformation in Computer Animation Chaman Singh Verma April 20, 2011 Figure 1: Barycentric Mapping usage: (a) Straightening the
Project-II: Comparing Mean Value, Harmonic and Green Coordinates for Mesh Deformation in Computer Animation Chaman Singh Verma April 20, 2011 Figure 1: Barycentric Mapping usage: (a) Straightening the
arxiv: v1 [cs.gr] 5 Sep 2017
![arxiv: v1 [cs.gr] 5 Sep 2017](/thumbs/90/103895300.jpg "arxiv: v1 [cs.gr] 5 Sep 2017") Sparse Data Driven Mesh Deformation arxiv:1709.01250v1 [cs.gr] 5 Sep 2017 LIN GAO, Institute of Computing Technology, Chinese Academy of Sciences YU-KUN LAI, School of Computer Science & Informatics, Cardiff
Sparse Data Driven Mesh Deformation arxiv:1709.01250v1 [cs.gr] 5 Sep 2017 LIN GAO, Institute of Computing Technology, Chinese Academy of Sciences YU-KUN LAI, School of Computer Science & Informatics, Cardiff
Introduction to geometry
 1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
1 2 Manifolds A topological space in which every point has a neighborhood homeomorphic to (topological disc) is called an n-dimensional (or n-) manifold Introduction to geometry The German way 2-manifold
Dynamic Points: When Geometry Meets Physics. Xiaohu Guo Stony Brook
 Dynamic Points: When Geometry Meets Physics Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Point Based Graphics Pipeline Acquisition Modeling Rendering laser scanning
Dynamic Points: When Geometry Meets Physics Xiaohu Guo SUNY @ Stony Brook Email: xguo@cs.sunysb.edu http://www.cs.sunysb.edu/~xguo Point Based Graphics Pipeline Acquisition Modeling Rendering laser scanning
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Generalized Barycentric Coordinates
 Generalized Barycentric Coordinates Kai Hormann Faculty of Informatics University of Lugano Cartesian coordinates y 3 2 ( 3,1) 1 3 2 1 1 2 3 (2,2) (0,0) 1 2 3 (1, 2) x René Descartes (1596 1650) Appendix
Generalized Barycentric Coordinates Kai Hormann Faculty of Informatics University of Lugano Cartesian coordinates y 3 2 ( 3,1) 1 3 2 1 1 2 3 (2,2) (0,0) 1 2 3 (1, 2) x René Descartes (1596 1650) Appendix
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Surface Topology ReebGraph
 Sub-Topics Compute bounding box Compute Euler Characteristic Estimate surface curvature Line description for conveying surface shape Extract skeletal representation of shapes Morse function and surface
Sub-Topics Compute bounding box Compute Euler Characteristic Estimate surface curvature Line description for conveying surface shape Extract skeletal representation of shapes Morse function and surface
CageIK: Dual-Laplacian Cage-Based Inverse Kinematics
 CageIK: Dual-Laplacian Cage-Based Inverse Kinematics Yann Savoye and Jean-Sébastien Franco LaBRI-INRIA Sud-Ouest, University of Bordeaux {yann.savoye,jean-sebastien.franco}@inria.fr Abstract. Cage-based
CageIK: Dual-Laplacian Cage-Based Inverse Kinematics Yann Savoye and Jean-Sébastien Franco LaBRI-INRIA Sud-Ouest, University of Bordeaux {yann.savoye,jean-sebastien.franco}@inria.fr Abstract. Cage-based
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia
 Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
Parameterization II Some slides from the Mesh Parameterization Course from Siggraph Asia 2008 1 Non-Convex Non Convex Boundary Convex boundary creates significant distortion Free boundary is better 2 Fixed
Simulation in Computer Graphics. Deformable Objects. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Graphics and Interaction Transformation geometry and homogeneous coordinates
 433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
433-324 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates
 COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
Parameterization with Manifolds
 Parameterization with Manifolds Manifold What they are Why they re difficult to use When a mesh isn t good enough Problem areas besides surface models A simple manifold Sphere, torus, plane, etc. Using
Parameterization with Manifolds Manifold What they are Why they re difficult to use When a mesh isn t good enough Problem areas besides surface models A simple manifold Sphere, torus, plane, etc. Using
How Much Geometry Lies in The Laplacian?
 How Much Geometry Lies in The Laplacian? Encoding and recovering the discrete metric on triangle meshes Distance Geometry Workshop in Bad Honnef, November 23, 2017 Maks Ovsjanikov Joint with: E. Corman,
How Much Geometry Lies in The Laplacian? Encoding and recovering the discrete metric on triangle meshes Distance Geometry Workshop in Bad Honnef, November 23, 2017 Maks Ovsjanikov Joint with: E. Corman,
Final Project, Digital Geometry Processing
 Final Project, Digital Geometry Processing Shayan Hoshyari Student #: 81382153 December 2016 Introduction In this project an adaptive surface remesher has been developed based on the paper [1]. An algorithm
Final Project, Digital Geometry Processing Shayan Hoshyari Student #: 81382153 December 2016 Introduction In this project an adaptive surface remesher has been developed based on the paper [1]. An algorithm
Accurate Reconstruction by Interpolation
 Accurate Reconstruction by Interpolation Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore International Conference on Inverse Problems and Related Topics
Accurate Reconstruction by Interpolation Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore International Conference on Inverse Problems and Related Topics