JPS+: Over 100x Faster than A* Steve Rabin Principal Lecturer DigiPen Institute of Technology
|
|
|
- Chastity Tate
- 6 years ago
- Views:
Transcription


1 JPS+: Over 100x Faster than A* Steve Rabin Principal Lecturer DigiPen Institute of Technology
2 JPS+: Over 100x Faster than A* JPS+ now with Goal Bounding: Over 1000x Faster than A*
3 Slides:
4 Coming out April 2015 however, back in June 2014 however, 2 months ago
5 Two Primary Techniques (Node Pruning) JPS+ (ICAPS July 2014) Avoid redundant paths on grids Goal Bounding (developed in Jan 2015) Avoid wrong directions on any kind of map
6 Test Maps (movingai.com) 75 StarCraft maps (198,230 problems) 156 Dragon Age Origins maps (159,465 problems) 36 Warcraft III maps (50,971 problems)
7 Test Maps (movingai.com) 75 StarCraft maps (198,230 problems) 156 Dragon Age Origins maps (159,465 problems) 36 Warcraft III maps (50,971 problems)

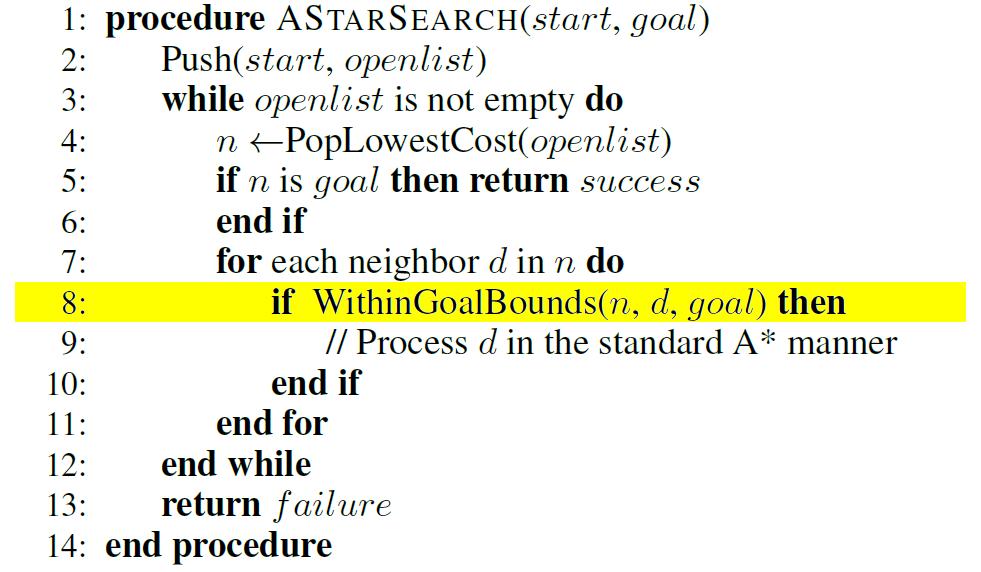
8 A* JPS+ JPS+ Goal Bounding

9 A* JPS+ JPS+ Goal Bounding

10 A* JPS+ JPS+ Goal Bounding

11 A* JPS+ JPS+ Goal Bounding

12 A* JPS+ JPS+ Goal Bounding
13 Goal Bounding JPS+ 70x to 350x faster Avoid Redundant Paths 1400x to 5000x faster 20x to 60x faster Avoid Wrong Directions



14 StarCraft Maps: JPS




15 StarCraft Maps: Subgoal Graph



16 StarCraft Maps: JPS+ Goal Bounds
17 StarCraft Maps: Comparison JPS+ Subgoal Graph 0 JPS+ Goal Bounds
18 StarCraft Maps: Comparison JPS+ 0 Subgoal Graph 0 JPS+ Goal Bounds
19 JPS+ 1 value Per Edge 4 values Per Edge Goal Bounding Grids, NavMesh, Graphs Fast O(n) Precompute Avoid Redundant Paths No Map Changes Slow O(n2) Precompute Dijkstra, A*, Uniform other algorithms Cost Avoid Non-Uniform Wrong Cost Directions
20 Overview JPS+ Preprocessing & Runtime Goal Bounding Preprocessing & Runtime Results and Analysis Future Work
21 JPS+ Explained

22 Equivalent Paths on Grids


23 JPS Search Strategy
24 JPS Search Strategy

25 JPS Search Strategy
26 JPS Search Strategy

27 JPS Search Strategy

28 JPS Search Strategy

29 Forced Neighbor Cases

30 Fewer Open List Nodes
31 Four Types of Jump Points Primary Straight Diagonal Target
32 Primary Jump Points


33 Straight Jump Points

34 Straight Jump Point Distance


35 Diagonal Jump Points


36 Add in Wall Distances (0 or neg)
37 Four Types of Jump Points Primary Straight Diagonal Target (runtime)

38 JPS+ Runtime Example
39
40
41
42


43
44
45
46
47
48
49 Goal Bounding
50 A* Search Reachable optimally by exploring left Optimal goal bounds when exploring left
51 JPS+ Search Reachable optimally by exploring left Optimal goal bounds when exploring left
52 A* Search Goal Bounds JPS+ Search Goal Bounds
53 Goal Bounding A* Search
54 Goal Bounding A* Search
55 Goal Bounding A* Search
56 Goal Bounding A* Search
57 Goal Bounding A* Search
58 Goal Bounding A* Search
59 Goal Bounding A* Search
60 Goal Bounding A* Search
61 Goal Bounding A* Search
62 Goal Bounding A* Search
63 Goal Bounding A* Search
64 Goal Bounding A* Search
65 Goal Bounding A* Search
66
67
68 How to calculate Goal Bounds Dijkstra floodfill from each node When you put a node on the Closed list Update start node s Goal Bounds (for the edge it originally came from!) Embarrassingly parallel
69 Calculating Goal Bounds
70 Calculating Goal Bounds
71 Calculating Goal Bounds
72 Calculating Goal Bounds
73 Calculating Goal Bounds
74 Calculating Goal Bounds
75 Calculating Goal Bounds
76 Calculating Goal Bounds
77 Calculating Goal Bounds
78 Calculating Goal Bounds
79 Calculating Goal Bounds
80 Calculating Goal Bounds
81 Calculating Goal Bounds
82 Calculating Goal Bounds
83 Calculating Goal Bounds
84 Calculating Goal Bounds
85 Calculating Goal Bounds

86 Calculating Goal Bounds
87 Calculating Goal Bounds
88 Calculating Goal Bounds
89 Calculating Goal Bounds
90 Calculating Goal Bounds
91 Calculating Goal Bounds
92 Calculating Goal Bounds
93 Calculating Goal Bounds
94 Calculating Goal Bounds
95 Calculating Goal Bounds
96 Calculating Goal Bounds
97 Calculating Goal Bounds
98 Calculating Goal Bounds
99 Calculating Goal Bounds
100 Calculating Goal Bounds
101 Calculating Goal Bounds
102 Calculating Goal Bounds
103 Calculating Goal Bounds
104 Calculating Goal Bounds
105 Calculating Goal Bounds
106 Calculating Goal Bounds
107 Calculating Goal Bounds
108 Calculating Goal Bounds
109 Calculating Goal Bounds
110 Calculating Goal Bounds
111 Calculating Goal Bounds
112 Calculating Goal Bounds
113 Optimizations
114 JPS+ Goal Bounding Fast stack and unsorted Open list Only works for grids using Octile heuristic
115 Across the Cape (768x768) 2940 tests From 4.41 to Search A* JPS+ GB Max Open List Size Avg Size On PopCheapest
116 Across the Cape (768x768) 2940 tests From 4.41 to Search A* JPS+ GB Max Open List Size 3464 Avg Size On PopCheapest
117 Across the Cape (768x768) 2940 tests From 4.41 to Search A* JPS+ GB Max Open List Size Avg Size On PopCheapest
118 Across the Cape (768x768) 2940 tests From 4.41 to Search A* JPS+ GB Max Open List Size Avg Size On PopCheapest

119 Across the Cape (768x768) 2940 tests From 4.41 to Search A* JPS+ GB Max Open List Size Avg Size On PopCheapest x faster than A*
120 Arctic Station (768x768) 4100 tests From 4 to long Search A* JPS+ GB Max Open List Size Avg Size On PopCheapest
121 Arctic Station (768x768) 4100 tests From 4 to long Search A* JPS+ GB Max Open List Size Avg Size On PopCheapest
122 Arctic Station (768x768) 4100 tests From 4 to long Search A* JPS+ GB Max Open List Size Avg Size On PopCheapest x faster than A*
123 JPS+ Goal Bounding Function pointer table 256 wall permutations X 8 parent directions 2048 look-up table pointing at 42 functions
124 Problem: Dynamic Maps
125 Goal Bounding Gates

126 Goal Bounding Gates
127 Goal Bounding Gates
128 Recap
129 Goal Bounding JPS+ 70x to 350x faster Avoid Redundant Paths 1400x to 5000x faster 20x to 60x faster Avoid Wrong Directions
130 JPS+ 1 value Per Edge 4 values Per Edge Goal Bounding Grids, NavMesh, Graphs Fast O(n) Precompute Avoid Redundant Paths No Map Changes Slow O(n2) Precompute Dijkstra, A*, Uniform other algorithms Cost Avoid Non-Uniform Wrong Cost Directions
131 StarCraft Maps: Comparison JPS+ 0 Subgoal Graph 0 JPS+ Goal Bounds
132 Future Work Can Goal Bounding work with Subgoal? Can the precompute be done in O(n)? Are there better bounds than a box? How much does it actually speed up A* on a NavMesh?

133 Questions? me for source code Slides at:
Combining Bounding Boxes and JPS to Prune Grid Pathfinding
 Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence (AAAI-16) Combining Bounding Boxes and JPS to Prune Grid Pathfinding Steve Rabin Dept. of Computer Science DigiPen Institute of Technology
Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence (AAAI-16) Combining Bounding Boxes and JPS to Prune Grid Pathfinding Steve Rabin Dept. of Computer Science DigiPen Institute of Technology
Combining Bounding Boxes and JPS to Prune Grid Pathfinding
 Combining Bounding Boxes and JPS to Prune Grid Pathfinding Steve Rabin Dept. of Computer Science DigiPen Institute of Technology Redmond, WA, USA steve.rabin@gmail.com Nathan R. Sturtevant Dept. of Computer
Combining Bounding Boxes and JPS to Prune Grid Pathfinding Steve Rabin Dept. of Computer Science DigiPen Institute of Technology Redmond, WA, USA steve.rabin@gmail.com Nathan R. Sturtevant Dept. of Computer
Canonical Orderings on Grids
 Canonical Orderings on Grids Nathan R. Sturtevant Department of Computer Science University of Denver Denver, CO, USA sturtevant@cs.du.edu Steve Rabin Department of Computer Science DigiPen Institute of
Canonical Orderings on Grids Nathan R. Sturtevant Department of Computer Science University of Denver Denver, CO, USA sturtevant@cs.du.edu Steve Rabin Department of Computer Science DigiPen Institute of
Map Abstraction with Adjustable Time Bounds
 Map Abstraction with Adjustable Time Bounds Sourodeep Bhattacharjee and Scott D. Goodwin School of Computer Science, University of Windsor Windsor, N9B 3P4, Canada sourodeepbhattacharjee@gmail.com, sgoodwin@uwindsor.ca
Map Abstraction with Adjustable Time Bounds Sourodeep Bhattacharjee and Scott D. Goodwin School of Computer Science, University of Windsor Windsor, N9B 3P4, Canada sourodeepbhattacharjee@gmail.com, sgoodwin@uwindsor.ca
Notes. Video Game AI: Lecture 5 Planning for Pathfinding. Lecture Overview. Knowledge vs Search. Jonathan Schaeffer this Friday
 Notes Video Game AI: Lecture 5 Planning for Pathfinding Nathan Sturtevant COMP 3705 Jonathan Schaeffer this Friday Planning vs localization We cover planning today Localization is just mapping a real-valued
Notes Video Game AI: Lecture 5 Planning for Pathfinding Nathan Sturtevant COMP 3705 Jonathan Schaeffer this Friday Planning vs localization We cover planning today Localization is just mapping a real-valued
Improving Jump Point Search
 Improving Jump Point Search Daniel Harabor and Alban Grastien NICTA and The Australian National University firstname.lastname@nicta.com.au Abstract We give online and offline optimisation techniques to
Improving Jump Point Search Daniel Harabor and Alban Grastien NICTA and The Australian National University firstname.lastname@nicta.com.au Abstract We give online and offline optimisation techniques to
Identifying Hierarchies for Fast Optimal Search
 Identifying Hierarchies for Fast Optimal Search Tansel Uras Sven Koenig Department of Computer Science University of Southern California Los Angeles, USA {turas, skoenig}@usc.edu Abstract Search with Subgoal
Identifying Hierarchies for Fast Optimal Search Tansel Uras Sven Koenig Department of Computer Science University of Southern California Los Angeles, USA {turas, skoenig}@usc.edu Abstract Search with Subgoal
Strict Theta*: Shorter Motion Path Planning Using Taut Paths
 Proceedings of the Twenty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2016) Strict Theta*: Shorter Motion Path Planning Using Taut Paths Shunhao Oh and Hon Wai Leong Department
Proceedings of the Twenty-Sixth International Conference on Automated Planning and Scheduling (ICAPS 2016) Strict Theta*: Shorter Motion Path Planning Using Taut Paths Shunhao Oh and Hon Wai Leong Department
Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences
 Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces
Game AI: The set of algorithms, representations, tools, and tricks that support the creation and management of real-time digital experiences : A rule of thumb, simplification, or educated guess that reduces
Multi-Agent Pathfinding with Real-Time Heuristic Search
 Multi-Agent Pathfinding with Real-Time Heuristic Search Devon Sigurdson, Vadim Bulitko, William Yeoh, Carlos Hernández and Sven Koenig Computing Science, University of Alberta Email: {dbsigurd,buliko}@ualberta.ca
Multi-Agent Pathfinding with Real-Time Heuristic Search Devon Sigurdson, Vadim Bulitko, William Yeoh, Carlos Hernández and Sven Koenig Computing Science, University of Alberta Email: {dbsigurd,buliko}@ualberta.ca
Course Outline. Video Game AI: Lecture 7 Heuristics & Smoothing. Finding the best location out of several. Variable size units / special movement?
 Course Outline Video Game AI: Lecture 7 Heuristics & Smoothing Nathan Sturtevant COMP 3705 http://aigamedev.com/ now has free interviews! Miscellaneous details Heuristics How better heuristics can be built
Course Outline Video Game AI: Lecture 7 Heuristics & Smoothing Nathan Sturtevant COMP 3705 http://aigamedev.com/ now has free interviews! Miscellaneous details Heuristics How better heuristics can be built
Finding a Path. Advanced Pathfinding. Finding a Path. A* Pathfinding Search. Practical Path Planning 3/21/2016. Tile-Based Navigation Graphs IMGD 4000
 3/21/2016 Finding a Path Often seems obvious and natural in real life e.g., Get from point A to B go around lake Advanced Pathfinding http://www.rocket5studios.com/tutorials/make-a-2d-game-withunity3d-using-only-free-tools-beginning-enemy-ai-with-a-pathfinding/
3/21/2016 Finding a Path Often seems obvious and natural in real life e.g., Get from point A to B go around lake Advanced Pathfinding http://www.rocket5studios.com/tutorials/make-a-2d-game-withunity3d-using-only-free-tools-beginning-enemy-ai-with-a-pathfinding/
Computer Vision & Digital Image Processing. Global Processing via Graph-Theoretic Techniques
 Computer Vision & Digital Image Processing Edge Linking Via Graph Theoretic Techniques Dr. D. J. Jackson Lecture 19-1 Global Processing via Graph-Theoretic Techniques The previous method for edge-linking
Computer Vision & Digital Image Processing Edge Linking Via Graph Theoretic Techniques Dr. D. J. Jackson Lecture 19-1 Global Processing via Graph-Theoretic Techniques The previous method for edge-linking
Any-Angle Search Case Study: Theta* slides by Alex Nash / with contributions by Sven Koenig
 Any-Angle Search Case Study: Theta* slides by Alex Nash anash@usc.edu / alexwnash@gmail.com with contributions by Sven Koenig skoenig@usc.edu Table of Contents o Introduction o Analysis of Path Lengths
Any-Angle Search Case Study: Theta* slides by Alex Nash anash@usc.edu / alexwnash@gmail.com with contributions by Sven Koenig skoenig@usc.edu Table of Contents o Introduction o Analysis of Path Lengths
Uniformed Search (cont.)
") Uniformed Search (cont.) Computer Science cpsc322, Lecture 6 (Textbook finish 3.5) Sept, 16, 2013 CPSC 322, Lecture 6 Slide 1 Lecture Overview Recap DFS vs BFS Uninformed Iterative Deepening (IDS) Search
Uniformed Search (cont.) Computer Science cpsc322, Lecture 6 (Textbook finish 3.5) Sept, 16, 2013 CPSC 322, Lecture 6 Slide 1 Lecture Overview Recap DFS vs BFS Uninformed Iterative Deepening (IDS) Search
Heuristic Search and Advanced Methods
 Heuristic Search and Advanced Methods Computer Science cpsc322, Lecture 3 (Textbook Chpt 3.6 3.7) May, 15, 2012 CPSC 322, Lecture 3 Slide 1 Course Announcements Posted on WebCT Assignment1 (due on Thurs!)
Heuristic Search and Advanced Methods Computer Science cpsc322, Lecture 3 (Textbook Chpt 3.6 3.7) May, 15, 2012 CPSC 322, Lecture 3 Slide 1 Course Announcements Posted on WebCT Assignment1 (due on Thurs!)
Heuristic Search: A* CPSC 322 Search 4 January 19, Textbook 3.6 Taught by: Vasanth
 Heuristic Search: A* CPSC 322 Search 4 January 19, 2011 Textbook 3.6 Taught by: Vasanth 1 Lecture Overview Recap Search heuristics: admissibility and examples Recap of BestFS Heuristic search: A* 2 Example
Heuristic Search: A* CPSC 322 Search 4 January 19, 2011 Textbook 3.6 Taught by: Vasanth 1 Lecture Overview Recap Search heuristics: admissibility and examples Recap of BestFS Heuristic search: A* 2 Example
Informed search strategies (Section ) Source: Fotolia
 Source: Fotolia") Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Informed search strategies (Section 3.5-3.6) Source: Fotolia Review: Tree search Initialize the frontier using the starting state While the frontier is not empty Choose a frontier node to expand according
Outline. Best-first search
 Outline Best-first search Greedy best-first search A* search Heuristics Admissible Heuristics Graph Search Consistent Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing
Outline Best-first search Greedy best-first search A* search Heuristics Admissible Heuristics Graph Search Consistent Heuristics Local search algorithms Hill-climbing search Beam search Simulated annealing
Enhancements to Hierarchical Pathfinding Algorithms
 University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2016 Enhancements to Hierarchical Pathfinding Algorithms Xin Li University of Denver Follow this and additional
University of Denver Digital Commons @ DU Electronic Theses and Dissertations Graduate Studies 1-1-2016 Enhancements to Hierarchical Pathfinding Algorithms Xin Li University of Denver Follow this and additional
Online Bridged Pruning for Real-Time Search with Arbitrary Lookaheads
 Online Bridged Pruning for Real-Time Search with Arbitrary Lookaheads Carlos Hernández Ulloa, Adi Botea, Jorge A. Baier,, Vadim Bulitko Chilean Center for Semantic Web Research IBM Research, Ireland Pontificia
Online Bridged Pruning for Real-Time Search with Arbitrary Lookaheads Carlos Hernández Ulloa, Adi Botea, Jorge A. Baier,, Vadim Bulitko Chilean Center for Semantic Web Research IBM Research, Ireland Pontificia
CSE 40171: Artificial Intelligence. Informed Search: A* Search
 CSE 40171: Artificial Intelligence Informed Search: A* Search 1 Homework #1 has been released. It is due at 11:59PM on 9/10. 2 Quick Recap: Search Quick Recap: Search Search problem: States (configurations
CSE 40171: Artificial Intelligence Informed Search: A* Search 1 Homework #1 has been released. It is due at 11:59PM on 9/10. 2 Quick Recap: Search Quick Recap: Search Search problem: States (configurations
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2: Search. Problem Solving Agents
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
Class Overview COMP 3501 / COMP 4704-4 Lecture 2: Search Prof. 1 2 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions?
A* optimality proof, cycle checking
 A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
A* optimality proof, cycle checking CPSC 322 Search 5 Textbook 3.6 and 3.7.1 January 21, 2011 Taught by Mike Chiang Lecture Overview Recap Admissibility of A* Cycle checking and multiple path pruning Slide
Two-Oracle Optimal Path Planning on Grid Maps
 Twenty-Eighth International Conference on Automated Planning and Scheduling (ICAPS 2018) Two-Oracle Optimal Path Planning on Grid Maps Matteo Salvetti Daniel Harabor Monash University Australia Adi Botea
Twenty-Eighth International Conference on Automated Planning and Scheduling (ICAPS 2018) Two-Oracle Optimal Path Planning on Grid Maps Matteo Salvetti Daniel Harabor Monash University Australia Adi Botea
IEEE TRANSACTIONS ON COMPUTATIONAL INTELLIGENCE AND AI IN GAMES, VOL. 5, NO. 3, SEPTEMBER Ramon Lawrence, Member, IEEE, and Vadim Bulitko
 IEEE TRANSACTIONS ON COMPUTATIONAL INTELLIGENCE AND AI IN GAMES, VOL. 5, NO. 3, SEPTEMBER 2013 227 Database-Driven Real-Time Heuristic Search in Video-Game Pathfinding Ramon Lawrence, Member, IEEE, and
IEEE TRANSACTIONS ON COMPUTATIONAL INTELLIGENCE AND AI IN GAMES, VOL. 5, NO. 3, SEPTEMBER 2013 227 Database-Driven Real-Time Heuristic Search in Video-Game Pathfinding Ramon Lawrence, Member, IEEE, and
ITCS 6150 Intelligent Systems. Lecture 5 Informed Searches
 ITCS 6150 Intelligent Systems Lecture 5 Informed Searches Informed Searches We are informed (in some way) about future states and future paths We use this information to make better decisions about which
ITCS 6150 Intelligent Systems Lecture 5 Informed Searches Informed Searches We are informed (in some way) about future states and future paths We use this information to make better decisions about which
Improving MPGAA* for Extended Visibility Ranges
 Proceedings of the Twenty-Seventh International Conference on Automated Planning and Scheduling (ICAPS 2017) Improving MPGAA* for Extended Visibility Ranges Carlos Hernández Depto. de Ciencias de la Ingeniería
Proceedings of the Twenty-Seventh International Conference on Automated Planning and Scheduling (ICAPS 2017) Improving MPGAA* for Extended Visibility Ranges Carlos Hernández Depto. de Ciencias de la Ingeniería
Class Overview. Introduction to Artificial Intelligence COMP 3501 / COMP Lecture 2. Problem Solving Agents. Problem Solving Agents: Assumptions
 Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
Class Overview COMP 3501 / COMP 4704-4 Lecture 2 Prof. JGH 318 Problem Solving Agents Problem Solving Agents: Assumptions Requires a goal Assume world is: Requires actions Observable What actions? Discrete
ME/CS 132: Advanced Robotics: Navigation and Vision
 ME/CS 132: Advanced Robotics: Navigation and Vision Lecture #5: Search Algorithm 1 Yoshiaki Kuwata 4/12/2011 Lecture Overview Introduction Label Correcting Algorithm Core idea Depth-first search Breadth-first
ME/CS 132: Advanced Robotics: Navigation and Vision Lecture #5: Search Algorithm 1 Yoshiaki Kuwata 4/12/2011 Lecture Overview Introduction Label Correcting Algorithm Core idea Depth-first search Breadth-first
Acknowledgements. Outline
 Acknowledgements Heuristic Search for Planning Sheila McIlraith University of Toronto Fall 2010 Many of the slides used in today s lecture are modifications of slides developed by Malte Helmert, Bernhard
Acknowledgements Heuristic Search for Planning Sheila McIlraith University of Toronto Fall 2010 Many of the slides used in today s lecture are modifications of slides developed by Malte Helmert, Bernhard
Real-Time Heuristic Search with Depression Avoidance
 Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence Real-Time Heuristic Search with Depression Avoidance Carlos Hernández Departamento de Ingeniería Informática Universidad
Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence Real-Time Heuristic Search with Depression Avoidance Carlos Hernández Departamento de Ingeniería Informática Universidad
COP 4531 Complexity & Analysis of Data Structures & Algorithms
 COP 4531 Complexity & Analysis of Data Structures & Algorithms Lecture 8 Data Structures for Disjoint Sets Thanks to the text authors who contributed to these slides Data Structures for Disjoint Sets Also
COP 4531 Complexity & Analysis of Data Structures & Algorithms Lecture 8 Data Structures for Disjoint Sets Thanks to the text authors who contributed to these slides Data Structures for Disjoint Sets Also
I may not have gone where I intended to go, but I think I have ended up where I needed to be. Douglas Adams
 Disclaimer: I use these notes as a guide rather than a comprehensive coverage of the topic. They are neither a substitute for attending the lectures nor for reading the assigned material. I may not have
Disclaimer: I use these notes as a guide rather than a comprehensive coverage of the topic. They are neither a substitute for attending the lectures nor for reading the assigned material. I may not have
Route planning / Search Movement Group behavior Decision making
 Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
Game AI Where is the AI Route planning / Search Movement Group behavior Decision making General Search Algorithm Design Keep a pair of set of states: One, the set of states to explore, called the open
CMPUT 396 Sliding Tile Puzzle
 CMPUT 396 Sliding Tile Puzzle Sliding Tile Puzzle 2x2 Sliding Tile States Exactly half of the states are solvable, the other half are not. In the case of 2x2 puzzles, I can solve it if I start with a configuration
CMPUT 396 Sliding Tile Puzzle Sliding Tile Puzzle 2x2 Sliding Tile States Exactly half of the states are solvable, the other half are not. In the case of 2x2 puzzles, I can solve it if I start with a configuration
Reach for A : an Efficient Point-to-Point Shortest Path Algorithm
 Reach for A : an Efficient Point-to-Point Shortest Path Algorithm Andrew V. Goldberg Microsoft Research Silicon Valley www.research.microsoft.com/ goldberg/ Joint with Haim Kaplan and Renato Werneck Einstein
Reach for A : an Efficient Point-to-Point Shortest Path Algorithm Andrew V. Goldberg Microsoft Research Silicon Valley www.research.microsoft.com/ goldberg/ Joint with Haim Kaplan and Renato Werneck Einstein
6.141: Robotics systems and science Lecture 10: Motion Planning III
 6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Motion Planning III Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2012 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Heuristic Search. Robert Platt Northeastern University. Some images and slides are used from: 1. CS188 UC Berkeley 2. RN, AIMA
 Heuristic Search Robert Platt Northeastern University Some images and slides are used from: 1. CS188 UC Berkeley 2. RN, AIMA Recap: What is graph search? Start state Goal state Graph search: find a path
Heuristic Search Robert Platt Northeastern University Some images and slides are used from: 1. CS188 UC Berkeley 2. RN, AIMA Recap: What is graph search? Start state Goal state Graph search: find a path
CS 387/680: GAME AI PATHFINDING
 CS 387/680: GAME AI PATHFINDING 4/16/2015 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2015/cs387/intro.html Reminders Check BBVista site for
CS 387/680: GAME AI PATHFINDING 4/16/2015 Instructor: Santiago Ontañón santi@cs.drexel.edu Class website: https://www.cs.drexel.edu/~santi/teaching/2015/cs387/intro.html Reminders Check BBVista site for
M-ary Search Tree. B-Trees. B-Trees. Solution: B-Trees. B-Tree: Example. B-Tree Properties. Maximum branching factor of M Complete tree has height =
 M-ary Search Tree B-Trees Section 4.7 in Weiss Maximum branching factor of M Complete tree has height = # disk accesses for find: Runtime of find: 2 Solution: B-Trees specialized M-ary search trees Each
M-ary Search Tree B-Trees Section 4.7 in Weiss Maximum branching factor of M Complete tree has height = # disk accesses for find: Runtime of find: 2 Solution: B-Trees specialized M-ary search trees Each
Learning Where You Are Going and from Whence You Came: h- and g-cost Learning in Real-Time Heuristic Search
 Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence Learning Where You Are Going and from Whence You Came: h- and g-cost Learning in Real-Time Heuristic Search Nathan
Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence Learning Where You Are Going and from Whence You Came: h- and g-cost Learning in Real-Time Heuristic Search Nathan
ANY-ANGLE PATH PLANNING. Alex Nash
 ANY-ANGLE PATH PLANNING by Alex Nash A Dissertation Presented to the FACULTY OF THE USC GRADUATE SCHOOL UNIVERSITY OF SOUTHERN CALIFORNIA In Partial Fulfillment of the Requirements for the Degree DOCTOR
ANY-ANGLE PATH PLANNING by Alex Nash A Dissertation Presented to the FACULTY OF THE USC GRADUATE SCHOOL UNIVERSITY OF SOUTHERN CALIFORNIA In Partial Fulfillment of the Requirements for the Degree DOCTOR
Searching. Assume goal- or utilitybased. Next task to achieve is to determine the best path to the goal
 Searching Assume goal- or utilitybased agents: state information ability to perform actions goals to achieve Next task to achieve is to determine the best path to the goal CSC384 Lecture Slides Steve Engels,
Searching Assume goal- or utilitybased agents: state information ability to perform actions goals to achieve Next task to achieve is to determine the best path to the goal CSC384 Lecture Slides Steve Engels,
Heuristic Search. Rob Platt Northeastern University. Some images and slides are used from: AIMA
 Heuristic Search Rob Platt Northeastern University Some images and slides are used from: AIMA Recap: What is graph search? Start state Goal state Graph search: find a path from start to goal what are the
Heuristic Search Rob Platt Northeastern University Some images and slides are used from: AIMA Recap: What is graph search? Start state Goal state Graph search: find a path from start to goal what are the
M-ary Search Tree. B-Trees. Solution: B-Trees. B-Tree: Example. B-Tree Properties. B-Trees (4.7 in Weiss)
") M-ary Search Tree B-Trees (4.7 in Weiss) Maximum branching factor of M Tree with N values has height = # disk accesses for find: Runtime of find: 1/21/2011 1 1/21/2011 2 Solution: B-Trees specialized M-ary
M-ary Search Tree B-Trees (4.7 in Weiss) Maximum branching factor of M Tree with N values has height = # disk accesses for find: Runtime of find: 1/21/2011 1 1/21/2011 2 Solution: B-Trees specialized M-ary
Navigation Mesh based Pathfinding for large crowds
 Navigation Mesh based Pathfinding for large crowds Robert Lindner Introduction This paper is about methods that can be used to get as much performance as possible while simulating the pathfinding of large
Navigation Mesh based Pathfinding for large crowds Robert Lindner Introduction This paper is about methods that can be used to get as much performance as possible while simulating the pathfinding of large
Chapter 5.4 Artificial Intelligence: Pathfinding
 Chapter 5.4 Artificial Intelligence: Pathfinding Introduction Almost every game requires pathfinding Agents must be able to find their way around the game world Pathfinding is not a trivial problem The
Chapter 5.4 Artificial Intelligence: Pathfinding Introduction Almost every game requires pathfinding Agents must be able to find their way around the game world Pathfinding is not a trivial problem The
CS 343H: Artificial Intelligence
 CS 343H: Artificial Intelligence Lecture 4: Informed Search 1/23/2014 Slides courtesy of Dan Klein at UC-Berkeley Unless otherwise noted Today Informed search Heuristics Greedy search A* search Graph search
CS 343H: Artificial Intelligence Lecture 4: Informed Search 1/23/2014 Slides courtesy of Dan Klein at UC-Berkeley Unless otherwise noted Today Informed search Heuristics Greedy search A* search Graph search
Single-Robot and Multi-Robot Path Planning with Quality Guarantees Cognitive Robotics Summer School 2017
 Single-Robot and Multi-Robot Path Planning with Quality Guarantees Cognitive Robotics Summer School 207 Sven Koenig, the awesome people in his research group and their awesome collaborators University
Single-Robot and Multi-Robot Path Planning with Quality Guarantees Cognitive Robotics Summer School 207 Sven Koenig, the awesome people in his research group and their awesome collaborators University
Constraint Satisfaction Problems
 Constraint Satisfaction Problems Search and Lookahead Bernhard Nebel, Julien Hué, and Stefan Wölfl Albert-Ludwigs-Universität Freiburg June 4/6, 2012 Nebel, Hué and Wölfl (Universität Freiburg) Constraint
Constraint Satisfaction Problems Search and Lookahead Bernhard Nebel, Julien Hué, and Stefan Wölfl Albert-Ludwigs-Universität Freiburg June 4/6, 2012 Nebel, Hué and Wölfl (Universität Freiburg) Constraint
Search : Lecture 2. September 9, 2003
 Search 6.825: Lecture 2 September 9, 2003 1 Problem-Solving Problems When your environment can be effectively modeled as having discrete states and actions deterministic, known world dynamics known initial
Search 6.825: Lecture 2 September 9, 2003 1 Problem-Solving Problems When your environment can be effectively modeled as having discrete states and actions deterministic, known world dynamics known initial
CS 231: Algorithmic Problem Solving
 CS 231: Algorithmic Problem Solving Naomi Nishimura Module 5 Date of this version: June 14, 2018 WARNING: Drafts of slides are made available prior to lecture for your convenience. After lecture, slides
CS 231: Algorithmic Problem Solving Naomi Nishimura Module 5 Date of this version: June 14, 2018 WARNING: Drafts of slides are made available prior to lecture for your convenience. After lecture, slides
Register Allocation. Note by Baris Aktemur: Our slides are adapted from Cooper and Torczon s slides that they prepared for COMP 412 at Rice.
 Register Allocation Note by Baris Aktemur: Our slides are adapted from Cooper and Torczon s slides that they prepared for COMP at Rice. Copyright 00, Keith D. Cooper & Linda Torczon, all rights reserved.
Register Allocation Note by Baris Aktemur: Our slides are adapted from Cooper and Torczon s slides that they prepared for COMP at Rice. Copyright 00, Keith D. Cooper & Linda Torczon, all rights reserved.
Abstractions and small languages in synthesis CS294: Program Synthesis for Everyone
 Abstractions and small languages in synthesis CS294: Program Synthesis for Everyone Ras Bodik Emina Torlak Division of Computer Science University of California, Berkeley Today Today: we describe why high-level
Abstractions and small languages in synthesis CS294: Program Synthesis for Everyone Ras Bodik Emina Torlak Division of Computer Science University of California, Berkeley Today Today: we describe why high-level
Range Minimum Queries Part Two
 Range Minimum Queries Part Two Recap from Last Time The RMQ Problem The Range Minimum Query (RMQ) problem is the following: Given a fixed array A and two indices i j, what is the smallest element out of
Range Minimum Queries Part Two Recap from Last Time The RMQ Problem The Range Minimum Query (RMQ) problem is the following: Given a fixed array A and two indices i j, what is the smallest element out of
Data Structures and Algorithms Dr. Naveen Garg Department of Computer Science and Engineering Indian Institute of Technology, Delhi
 Data Structures and Algorithms Dr. Naveen Garg Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture 20 Priority Queues Today we are going to look at the priority
Data Structures and Algorithms Dr. Naveen Garg Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture 20 Priority Queues Today we are going to look at the priority
INTRODUCTION TO HEURISTIC SEARCH
 INTRODUCTION TO HEURISTIC SEARCH What is heuristic search? Given a problem in which we must make a series of decisions, determine the sequence of decisions which provably optimizes some criterion. What
INTRODUCTION TO HEURISTIC SEARCH What is heuristic search? Given a problem in which we must make a series of decisions, determine the sequence of decisions which provably optimizes some criterion. What
Heuristic Search for Planning
 Heuristic Search for Planning Sheila McIlraith University of Toronto Fall 2010 S. McIlraith Heuristic Search for Planning 1 / 50 Acknowledgements Many of the slides used in today s lecture are modifications
Heuristic Search for Planning Sheila McIlraith University of Toronto Fall 2010 S. McIlraith Heuristic Search for Planning 1 / 50 Acknowledgements Many of the slides used in today s lecture are modifications
Introduction to Visualization and Computer Graphics
 Introduction to Visualization and Computer Graphics DH2320, Fall 2015 Prof. Dr. Tino Weinkauf Introduction to Visualization and Computer Graphics Visibility Shading 3D Rendering Geometric Model Color Perspective
Introduction to Visualization and Computer Graphics DH2320, Fall 2015 Prof. Dr. Tino Weinkauf Introduction to Visualization and Computer Graphics Visibility Shading 3D Rendering Geometric Model Color Perspective
Search: Advanced Topics and Conclusion
 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8 January 20, 2006 Textbook 2.6 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8, Slide 1 Lecture Overview Recap Branch & Bound A Tricks
Search: Advanced Topics and Conclusion CPSC 322 Lecture 8 January 20, 2006 Textbook 2.6 Search: Advanced Topics and Conclusion CPSC 322 Lecture 8, Slide 1 Lecture Overview Recap Branch & Bound A Tricks
Pathfinding. Advaith Siddharthan
 Pathfinding Advaith Siddharthan Context What is Intelligence? Rational? Search Optimisation Reasoning Impulsive? Quicker response Less predictable Personality/Emotions: Angry/Bored/Curious Overview The
Pathfinding Advaith Siddharthan Context What is Intelligence? Rational? Search Optimisation Reasoning Impulsive? Quicker response Less predictable Personality/Emotions: Angry/Bored/Curious Overview The
Local Search. (Textbook Chpt 4.8) Computer Science cpsc322, Lecture 14. May, 30, CPSC 322, Lecture 14 Slide 1
 Computer Science cpsc322, Lecture 14. May, 30, CPSC 322, Lecture 14 Slide 1") Local Search Computer Science cpsc322, Lecture 14 (Textbook Chpt 4.8) May, 30, 2017 CPSC 322, Lecture 14 Slide 1 Announcements Assignment1 due now! Assignment2 out today CPSC 322, Lecture 10 Slide 2 Lecture
Local Search Computer Science cpsc322, Lecture 14 (Textbook Chpt 4.8) May, 30, 2017 CPSC 322, Lecture 14 Slide 1 Announcements Assignment1 due now! Assignment2 out today CPSC 322, Lecture 10 Slide 2 Lecture
9/29/09 Comp /Comp Fall
 9/29/9 Comp 9-9/Comp 79-9 Fall 29 1 So far we ve tried: A greedy algorithm that does not work for all inputs (it is incorrect) An exhaustive search algorithm that is correct, but can take a long time A
9/29/9 Comp 9-9/Comp 79-9 Fall 29 1 So far we ve tried: A greedy algorithm that does not work for all inputs (it is incorrect) An exhaustive search algorithm that is correct, but can take a long time A
DBA* A Real-Time Path Finding Algorithm
 DBA* A Real-Time Path Finding Algorithm By William Lee A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Bachelor of Arts Honours In The Irving K. Barber School of Arts and
DBA* A Real-Time Path Finding Algorithm By William Lee A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Bachelor of Arts Honours In The Irving K. Barber School of Arts and
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Desktop Studio: Charts. Version: 7.3
 Desktop Studio: Charts Version: 7.3 Copyright 2015 Intellicus Technologies This document and its content is copyrighted material of Intellicus Technologies. The content may not be copied or derived from,
Desktop Studio: Charts Version: 7.3 Copyright 2015 Intellicus Technologies This document and its content is copyrighted material of Intellicus Technologies. The content may not be copied or derived from,
Robotic Motion Planning: A* and D* Search
 Robotic Motion Planning: A* and D* Search Robotics Institute 6-75 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset 6-75, Howie Choset with slides from G. Ayorker
Robotic Motion Planning: A* and D* Search Robotics Institute 6-75 http://voronoi.sbp.ri.cmu.edu/~motion Howie Choset http://voronoi.sbp.ri.cmu.edu/~choset 6-75, Howie Choset with slides from G. Ayorker
CS 106X, Lecture 23 Dijkstra and A* Search
 CS 106X, Lecture 23 Dijkstra and A* Search reading: Programming Abstractions in C++, Chapter 18 This document is copyright (C) Stanford Computer Science and Nick Troccoli, licensed under Creative Commons
CS 106X, Lecture 23 Dijkstra and A* Search reading: Programming Abstractions in C++, Chapter 18 This document is copyright (C) Stanford Computer Science and Nick Troccoli, licensed under Creative Commons
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
Artificial Intelligence Prof. Deepak Khemani Department of Computer Science and Engineering Indian Institute of Technology, Madras
 Artificial Intelligence Prof. Deepak Khemani Department of Computer Science and Engineering Indian Institute of Technology, Madras (Refer Slide Time: 00:17) Lecture No - 10 Hill Climbing So, we were looking
Artificial Intelligence Prof. Deepak Khemani Department of Computer Science and Engineering Indian Institute of Technology, Madras (Refer Slide Time: 00:17) Lecture No - 10 Hill Climbing So, we were looking
Approximate Nearest Neighbors. CS 510 Lecture #24 April 18 th, 2014
 Approximate Nearest Neighbors CS 510 Lecture #24 April 18 th, 2014 How is the assignment going? 2 hcp://breckon.eu/toby/demos/videovolumes/ Review: Video as Data Cube Mathematically, the cube can be viewed
Approximate Nearest Neighbors CS 510 Lecture #24 April 18 th, 2014 How is the assignment going? 2 hcp://breckon.eu/toby/demos/videovolumes/ Review: Video as Data Cube Mathematically, the cube can be viewed
lecture29: Shortest Path Algorithms
 lecture29: Shortest Path Algorithms Largely based on slides by Cinda Heeren CS 225 UIUC 30th July, 2013 Outline 1 Announcements 2 3 4 Announcements lab graphs due Thursday, 8/1 final exam this Friday (8/2),
lecture29: Shortest Path Algorithms Largely based on slides by Cinda Heeren CS 225 UIUC 30th July, 2013 Outline 1 Announcements 2 3 4 Announcements lab graphs due Thursday, 8/1 final exam this Friday (8/2),
Local Search. (Textbook Chpt 4.8) Computer Science cpsc322, Lecture 14. Oct, 7, CPSC 322, Lecture 14 Slide 1
 Computer Science cpsc322, Lecture 14. Oct, 7, CPSC 322, Lecture 14 Slide 1") Local Search Computer Science cpsc322, Lecture 14 (Textbook Chpt 4.8) Oct, 7, 2013 CPSC 322, Lecture 14 Slide 1 Department of Computer Science Undergraduate Events More details @ https://www.cs.ubc.ca/students/undergrad/life/upcoming-events
Local Search Computer Science cpsc322, Lecture 14 (Textbook Chpt 4.8) Oct, 7, 2013 CPSC 322, Lecture 14 Slide 1 Department of Computer Science Undergraduate Events More details @ https://www.cs.ubc.ca/students/undergrad/life/upcoming-events
Compressing Pattern Databases
 Compressing Pattern Databases Ariel Felner and Ram Meshulam Computer Science Department Bar-Ilan University Ramat-Gan, Israel 92500 Email: felner,meshulr1 @cs.biu.ac.il Robert C. Holte Computing Science
Compressing Pattern Databases Ariel Felner and Ram Meshulam Computer Science Department Bar-Ilan University Ramat-Gan, Israel 92500 Email: felner,meshulr1 @cs.biu.ac.il Robert C. Holte Computing Science
Desktop Studio: Charts
 Desktop Studio: Charts Intellicus Enterprise Reporting and BI Platform Intellicus Technologies info@intellicus.com www.intellicus.com Working with Charts i Copyright 2011 Intellicus Technologies This document
Desktop Studio: Charts Intellicus Enterprise Reporting and BI Platform Intellicus Technologies info@intellicus.com www.intellicus.com Working with Charts i Copyright 2011 Intellicus Technologies This document
Heuristic (Informed) Search
 Search") Heuristic (Informed) Search (Where we try to choose smartly) R&N: Chap., Sect..1 3 1 Search Algorithm #2 SEARCH#2 1. INSERT(initial-node,Open-List) 2. Repeat: a. If empty(open-list) then return failure
Heuristic (Informed) Search (Where we try to choose smartly) R&N: Chap., Sect..1 3 1 Search Algorithm #2 SEARCH#2 1. INSERT(initial-node,Open-List) 2. Repeat: a. If empty(open-list) then return failure
CSE 326: Data Structures B-Trees and B+ Trees
 Announcements (2/4/09) CSE 26: Data Structures B-Trees and B+ Trees Midterm on Friday Special office hour: 4:00-5:00 Thursday in Jaech Gallery (6 th floor of CSE building) This is in addition to my usual
Announcements (2/4/09) CSE 26: Data Structures B-Trees and B+ Trees Midterm on Friday Special office hour: 4:00-5:00 Thursday in Jaech Gallery (6 th floor of CSE building) This is in addition to my usual
521495A: Artificial Intelligence
 521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
521495A: Artificial Intelligence Informed Search Lectured by Abdenour Hadid Adjunct Professor, CMVS, University of Oulu Slides adopted from http://ai.berkeley.edu Today Informed Search Heuristics Greedy
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
CMU-Q Lecture 2: Search problems Uninformed search. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
CMU-Q 15-381 Lecture 2: Search problems Uninformed search Teacher: Gianni A. Di Caro RECAP: ACT RATIONALLY Think like people Think rationally Agent Sensors? Actuators Percepts Actions Environment Act like
Spatial Data Structures
 CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
CSCI 420 Computer Graphics Lecture 17 Spatial Data Structures Jernej Barbic University of Southern California Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees [Angel Ch. 8] 1 Ray Tracing Acceleration
Lecture 5 Heuristics. Last Time: A* Search
 CSE 473 Lecture 5 Heuristics CSE AI Faculty Last Time: A* Search Use an evaluation function f(n) for node n. f(n) = estimated total cost of path thru n to goal f(n) = g(n) + h(n) g(n) = cost so far to
CSE 473 Lecture 5 Heuristics CSE AI Faculty Last Time: A* Search Use an evaluation function f(n) for node n. f(n) = estimated total cost of path thru n to goal f(n) = g(n) + h(n) g(n) = cost so far to
Search and Games. Adi Botea. ANU Summer Schools in Logic and Learning February, 2009
 Search and Games Adi Botea ANU Summer Schools in Logic and Learning February, 2009 Outline 1 Introduction 2 Problem Representation 3 Uninformed Search 4 Informed Search 5 Hierarchical Abstraction Outline
Search and Games Adi Botea ANU Summer Schools in Logic and Learning February, 2009 Outline 1 Introduction 2 Problem Representation 3 Uninformed Search 4 Informed Search 5 Hierarchical Abstraction Outline
ARTIFICIAL INTELLIGENCE. Informed search
 INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Informed search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
INFOB2KI 2017-2018 Utrecht University The Netherlands ARTIFICIAL INTELLIGENCE Informed search Lecturer: Silja Renooij These slides are part of the INFOB2KI Course Notes available from www.cs.uu.nl/docs/vakken/b2ki/schema.html
Lecture 4. Convexity Robust cost functions Optimizing non-convex functions. 3B1B Optimization Michaelmas 2017 A. Zisserman
 Lecture 4 3B1B Optimization Michaelmas 2017 A. Zisserman Convexity Robust cost functions Optimizing non-convex functions grid search branch and bound simulated annealing evolutionary optimization The Optimization
Lecture 4 3B1B Optimization Michaelmas 2017 A. Zisserman Convexity Robust cost functions Optimizing non-convex functions grid search branch and bound simulated annealing evolutionary optimization The Optimization
Spatial Data Structures
 CSCI 480 Computer Graphics Lecture 7 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids BSP Trees [Ch. 0.] March 8, 0 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s/
CSCI 480 Computer Graphics Lecture 7 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids BSP Trees [Ch. 0.] March 8, 0 Jernej Barbic University of Southern California http://www-bcf.usc.edu/~jbarbic/cs480-s/
Intermediate Programming, Spring 2017*
 600.120 Intermediate Programming, Spring 2017* Misha Kazhdan *Much of the code in these examples is not commented because it would otherwise not fit on the slides. This is bad coding practice in general
600.120 Intermediate Programming, Spring 2017* Misha Kazhdan *Much of the code in these examples is not commented because it would otherwise not fit on the slides. This is bad coding practice in general
Fast Near-Optimal Path Planning on State Lattices with Subgoal Graphs
 Fast Near-Optimal Path Planning on State Lattices with Subgoal Graphs Tansel Uras and Sven Koenig Department of Computer Science University of Southern California Los Angeles, USA {turas, skoenig}@usc.edu
Fast Near-Optimal Path Planning on State Lattices with Subgoal Graphs Tansel Uras and Sven Koenig Department of Computer Science University of Southern California Los Angeles, USA {turas, skoenig}@usc.edu
Basic Search Algorithms
 Basic Search Algorithms Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract The complexities of various search algorithms are considered in terms of time, space, and cost
Basic Search Algorithms Tsan-sheng Hsu tshsu@iis.sinica.edu.tw http://www.iis.sinica.edu.tw/~tshsu 1 Abstract The complexities of various search algorithms are considered in terms of time, space, and cost
Local Search and Optimization Chapter 4. Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )
") Local Search and Optimization Chapter 4 Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld ) 1 Outline Local search techniques and optimization Hill-climbing
Local Search and Optimization Chapter 4 Mausam (Based on slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld ) 1 Outline Local search techniques and optimization Hill-climbing
MICROMOUSE ALGORITHMS. Navigation, Path finding, and Maze Encoding
 MICROMOUSE ALGORITHMS Navigation, Path finding, and Maze Encoding FEEDBACK CONTROL Your mouse can never go perfectly straight in practice Mouse can drift to one side, traction may not be same on wheels,
MICROMOUSE ALGORITHMS Navigation, Path finding, and Maze Encoding FEEDBACK CONTROL Your mouse can never go perfectly straight in practice Mouse can drift to one side, traction may not be same on wheels,
CmpSci 187: Programming with Data Structures Spring 2015
 CmpSci 187: Programming with Data Structures Spring 2015 Lecture #9 John Ridgway February 26, 2015 1 Recursive Definitions, Algorithms, and Programs Recursion in General In mathematics and computer science
CmpSci 187: Programming with Data Structures Spring 2015 Lecture #9 John Ridgway February 26, 2015 1 Recursive Definitions, Algorithms, and Programs Recursion in General In mathematics and computer science
Recap A Search Optimality of A. Search: A. CPSC 322 Search 5. Textbook 3.6. Search: A CPSC 322 Search 5, Slide 1
 Search: A CPSC 322 Search 5 Textbook 3.6 Search: A CPSC 322 Search 5, Slide 1 Lecture Overview 1 Recap 2 A Search 3 Optimality of A Search: A CPSC 322 Search 5, Slide 2 Search with Costs Sometimes there
Search: A CPSC 322 Search 5 Textbook 3.6 Search: A CPSC 322 Search 5, Slide 1 Lecture Overview 1 Recap 2 A Search 3 Optimality of A Search: A CPSC 322 Search 5, Slide 2 Search with Costs Sometimes there
Advanced Digital Logic Design EECS 303
 Advanced Digital Logic Design EECS 303 http://ziyang.eecs.northwestern.edu/eecs303/ Teacher: Robert Dick Office: L477 Tech Email: dickrp@northwestern.edu Phone: 847 467 2298 Outline 1. 2. 2 Robert Dick
Advanced Digital Logic Design EECS 303 http://ziyang.eecs.northwestern.edu/eecs303/ Teacher: Robert Dick Office: L477 Tech Email: dickrp@northwestern.edu Phone: 847 467 2298 Outline 1. 2. 2 Robert Dick
A and Branch-and-Bound Search
 A and Branch-and-Bound Search CPSC 322 Lecture 7 January 17, 2006 Textbook 2.5 A and Branch-and-Bound Search CPSC 322 Lecture 7, Slide 1 Lecture Overview Recap A Search Optimality of A Optimal Efficiency
A and Branch-and-Bound Search CPSC 322 Lecture 7 January 17, 2006 Textbook 2.5 A and Branch-and-Bound Search CPSC 322 Lecture 7, Slide 1 Lecture Overview Recap A Search Optimality of A Optimal Efficiency
Recap Randomized Algorithms Comparing SLS Algorithms. Local Search. CPSC 322 CSPs 5. Textbook 4.8. Local Search CPSC 322 CSPs 5, Slide 1
 Local Search CPSC 322 CSPs 5 Textbook 4.8 Local Search CPSC 322 CSPs 5, Slide 1 Lecture Overview 1 Recap 2 Randomized Algorithms 3 Comparing SLS Algorithms Local Search CPSC 322 CSPs 5, Slide 2 Stochastic
Local Search CPSC 322 CSPs 5 Textbook 4.8 Local Search CPSC 322 CSPs 5, Slide 1 Lecture Overview 1 Recap 2 Randomized Algorithms 3 Comparing SLS Algorithms Local Search CPSC 322 CSPs 5, Slide 2 Stochastic
Lecture 6 Basic Graph Algorithms
 CS 491 CAP Intro to Competitive Algorithmic Programming Lecture 6 Basic Graph Algorithms Uttam Thakore University of Illinois at Urbana-Champaign September 30, 2015 Updates ICPC Regionals teams will be
CS 491 CAP Intro to Competitive Algorithmic Programming Lecture 6 Basic Graph Algorithms Uttam Thakore University of Illinois at Urbana-Champaign September 30, 2015 Updates ICPC Regionals teams will be