What Makes a Patch Distinct?
|
|
|
- Cecily Jenkins
- 6 years ago
- Views:
Transcription
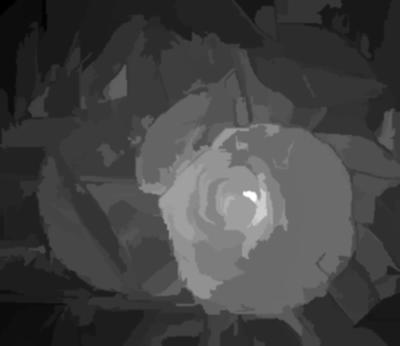
 Input (b) RC [6] (c) CBS [11] (d) CNTX [9] (e) SVO [5] (f) Ours Figure 1.")
![Salient object detection: This figure compares our results to those of the Top-4 algorithms according to [4].](/docs-images/71/65982389/images/1-2.jpg "(b) [6] consider only color distinctness, hence, erroneously detect the red surface as salient. (c) [11] rely on shape priors and thus, detect only the beard and arm.")
![(d) [9] search for unique patches, hence, detect mostly the outline of the statue. (e) [5] add an objectness measure to [9].](/docs-images/71/65982389/images/1-4.jpg "Their result is fuzzy due to the objects in the background (tree and clouds).")
1 What Makes a Patch Distinct? Ran Margolin Technion Haifa, Israel margolin@tx.technion.ac.il Ayellet Tal Technion Haifa, Israel ayellet@ee.technion.ac.il Lihi Zelnik-Manor Technion Haifa, Israel lihi@ee.technion.ac.il (a) Input (b) RC [6] (c) CBS [11] (d) CNTX [9] (e) SVO [5] (f) Ours Figure 1. Salient object detection: This figure compares our results to those of the Top-4 algorithms according to [4]. (b) [6] consider only color distinctness, hence, erroneously detect the red surface as salient. (c) [11] rely on shape priors and thus, detect only the beard and arm. (d) [9] search for unique patches, hence, detect mostly the outline of the statue. (e) [5] add an objectness measure to [9]. Their result is fuzzy due to the objects in the background (tree and clouds). (f) Our algorithm accurately detects the entire statue, excluding all background pixels, by considering both color and pattern distinctness. Abstract What makes an object salient? Most previous work assert that distinctness is the dominating factor. The difference between the various algorithms is in the way they compute distinctness. Some focus on the patterns, others on the colors, and several add high-level cues and priors. We propose a simple, yet powerful, algorithm that integrates these three factors. Our key contribution is a novel and fast approach to compute pattern distinctness. We rely on the inner statistics of the patches in the image for identifying unique patterns. We provide an extensive evaluation and show that our approach outperforms all state-of-the-art methods on the five most commonly-used datasets. 1. Introduction The detection of the most salient region of an image has numerous applications, including object detection and recognition [13], image compression [10], video summarization [16], and photo collage [8], to name a few. Therefore, it is not surprising that much work has been done on saliency detection. Different aspects of distinctness have been examined before. Some algorithms look for regions of distinct color [6, 11]. As shown in Figure 1(b) this is insufficient, as some regions of distinct color may be non-salient. Other algorithms [5, 9] detect distinct patterns, such as the boundaries between an object and the background. As illustrated in Figure 1(d), this could lead to missing homogeneous regions of the salient object. In this paper, we introduce a new algorithm for salient object detection, which solves the above problems. It integrates pattern and color distinctness in a unique manner. Our key idea is that the analysis of the inner statistics of patches in the image provides acute insight on the distinctness of regions. A popular and efficient method to reveal the internal structure of the data is Principal Component Analysis (PCA). It finds the components that best explain the variance in the data. Therefore, we propose to use PCA to represent the set of patches of an image and use this representation to determine distinctness. This is in contrast to previous approaches that compared each patch to its k- nearest neighbors [9, 5], without taking into account the internal statistics of all the other image patches. 1
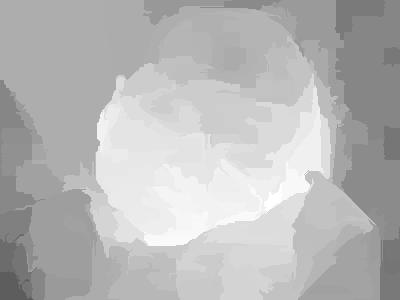
![We test our method on the recently-published benchmark of Borji et al. [4]. This benchmark consists of five wellknown datasets of natural images, with one or more salient objects.](/docs-images/71/65982389/images/2-1.jpg "In [4], many algorithms are compared on these datasets and the Top-4 algorithms, which outshine all others, are identified.")
, color distinctness detection (Section 2.")
 Input (b) Pattern distinctness 2.")
2 We test our method on the recently-published benchmark of Borji et al. [4]. This benchmark consists of five wellknown datasets of natural images, with one or more salient objects. In [4], many algorithms are compared on these datasets and the Top-4 algorithms, which outshine all others, are identified. We show that our algorithm outperforms all Top-4 algorithms on all the data-sets of the benchmark. Furthermore, our method is computationally efficient. The rest of this paper is organized as follows. We begin by describing our approach, which consists of three steps: pattern distinctness detection (Section 2.1), color distinctness detection (Section 2.2) and finally incorporating priors on human preferences and image organization (Section 2.3). We then proceed to evaluate our method both quantitatively and qualitatively in Section 3. (a) Input (b) Pattern distinctness 2. Proposed approach The guiding principle of our approach is that a salient object consists of pixels whose local neighborhood (region or patch) is distinctive in both color and pattern. As illustrated in Figure 2, integrating pattern and color distinctness is essential for handling complex images. Pattern distinctness is determined by considering the internal statistics of the patches in the image. A pixel is deemed salient if the pattern of its surrounding patch cannot be explained well by other image patches. We further consider the color uniqueness of the pixel s local neighborhood. Finally, we incorporate known priors on image organization. In what follows, we elaborate on each of these steps Pattern Distinctness The common solution to measure pattern distinctness is based on comparing each image patch to all other image patches [5, 9, 19]. A patch that is different from all other image patches, is considered salient. While this solution works nicely in many cases, it overlooks the correlation between pixels and hence errs in some cases. Furthermore, this solution is inefficient as it requires numerous patch-topatch distance calculations. Instead, by analyzing the properties of patches of natural images, we make several observations that improve detection accuracy via a fast and simple solution. Our first observation is that the non-distinct patches of a natural image are mostly concentrated in the high-dimensional space, while distinct patches are more scattered. This phenomenon is evident from the plots in Figure 3 that were obtained as follows. For each one of 100 images, randomly selected from the ASD data-set [1], we first extract all 9 9 patches and compute the average patch. We then calculate the distance between every patch and the average patch and normalize by the maximum distance. Since the data-set is available with a labeled ground-truth, we analyze separately distinct and non-distinct regions. The solid (c) Color distinctness (d) Final saliency Figure 2. System overview: Our pattern distinctness (b), captures the unique textures on the statue, but also part of the tree in the background. Our color distinctness (c), detects the statue fully, but also the red podium and part of the sky. In the final result (d), only the statue is maintained, as it is the only part detected by both. lines in Figure 3 show the cumulative histograms of the distances between non-distinct patches and the average patch. The dashed lines represent statistics of distinct patches only. As can be seen, non-distinct patches are much more concentrated around the average patch than distinct patches. For example, using the L 1 metric, 60% of the non-distinct patches are within a distance of 0.1, while only less than 20% of the distinct patches are within this distance. Figure 3. Scatter distinguishes between distinct and nondistinct patches: This figure presents the cumulative histograms of the distances between distinct (dashed lines) and non-distinct (solid lines) patches to the average patch. Both L 1 and PCA approaches show that non-distinct patches are significantly more concentrated around the average patch than non-distinct patches.
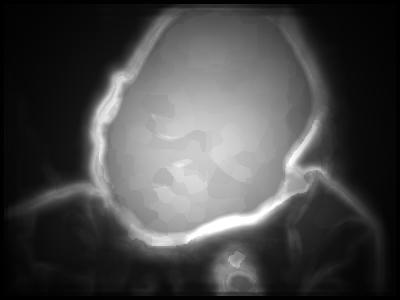
 x=1 An image patch p x is considered distinct if it is dissimilar to the average patch p A.")
3 The plots of Figure 3 suggest that one could possibly identify the distinct patches by measuring the distance to the average patch. In particular, we use the average patch p A under the L 1 norm: p A = 1 N N p x. (1) x=1 An image patch p x is considered distinct if it is dissimilar to the average patch p A. Note that computing the distance between every patch and the average patch bares some conceptual resemblance to the common approach of [5, 9, 19]. They try to measure the isolation of a patch in patch-space by computing the distance to its k-nearest neighbors. Instead, we propose a significantly more efficient solution, as all patches are compared to a single patch p A. At a first thought, this simple idea might not make much sense. Suppose that a certain patch appears in two different images. These two images could have the same average patch, thus the distance of the patch to the average would be equal. However, the saliency of this patch should be totally different, when the images have different patch distributions. This is illustrated in Figure 4. In this figure the patch p x (marked in red) should be considered as salient in image Im 2 and non-salient in image Im 1. Yet, the Euclidean distance between p x and the average patch p A (dashed purple line) is the same for both images. Were we to rely on this distance to determine distinctness we would likely fail. This behavior is also one of the downfalls of the k-nearest patches approach. As can be seen in Figure 4, the patch p x has the same k-nearest patches in both images (contained within the dashed red circle) and hence will be assigned the same level of distinctness by [5, 9]. So, how come it works? Using either L 2 or L 1 to measure distances between patches ignores the internal statistics of the image patches. The reason patch p x should be considered as distinct in image Im 2 is that it is inconsistent with the other patches of image Im 2. The statistics of patches in each image are different, as evident from the distributions of the patches in Figure 4. This is overlooked by the conventional distance metrics. Our second observation is that the distance to the average patch should consider the patch distribution in the image. We realize this observation by computing the principal components, thus capturing the dominant variations among patches. We then consider a patch distinct if the path connecting it to the average patch, along the principal components, is long. For each patch we march along the principal components towards the average patch and compute the accumulated length of this path. Mathematically, this boils down to calculating the L 1 norm of p x in PCA coordinates. Thus, pattern distinctness Figure 4. Saliency should depend on patch distribution: Im 1 and Im 2 represent two different images whose principal components are marked by the solid lines. The images share the average patch p A. The patch p x is highly probable in the distribution of Im 1 and hence should not be considered distinct in Im 1, while the same patch is less probable in image Im 2 and hence should be considered distinct in Im 2. The L 2 distance (purple line) and L 1 distance (green line) between p x and p A are oblivious to the image distributions and therefore will assign the same level of distinctness to p x in both images. Instead, computing the length of the paths between p x and p A, along the principal components of each image, takes under consideration the distribution of patches in each image. The path for image Im 2 (dashed blue line) is longer than the path for image Im 1 (dashed orange line), correctly corresponding to the distinctness level of p x in each image. P (p x ) is defined as: P (p x ) = p x 1, (2) where p x is p x s coordinates in the PCA coordinate system. As shown in Figure 4, the path from p x to p A along the principal components of image Im 2 (marked in blue) is much longer than the path along the principal components of image Im 1 (marked in orange). Hence, the patch p x will be considered more salient in image Im 2 than in image Im 1. Figure 5 provides further visualization of the proposed pattern distinctness measure. In this image, the drawings on the wall are salient because they contain unique patterns, compared to the building s facade. The path along the principal components, between the average patch and a patch on the drawings, contains meaningful patterns from the image. Implementation details: To disregard lighting effects we a-priori subtract from each patch its mean value. To detect distinct regions regardless of their size, we compute the pattern distinctness of Eq. (2) in three resolutions: 100%, 50% and 25% and average them. Finally, we apply morphological operations to fill holes in the pattern map [20]. Computational efficiency: A major benefit of using the approach described above is its computational efficiency,
 An image with its average patch and samples of a non-distinct and a distinct patch. (b) Our pattern distinctness P.")



![The evaluation was performed on three well known datasets [1, 3, 15]. Table 1 summarizes our results.](/docs-images/71/65982389/images/4-5.jpg "To measure accuracy, we report the Area-Under-the-Curve (AUC) and Average Precision (AP) (the higher the better). In addition, we compare run-times.")
![Our approach is more accurate than both Exact-KNN and Method Accuracy Run time Speedup AUC AP (sec/image) ASD [1] Exact-KNN 0.794 0.483 39.58 1 Approx-KNN [18] 0.](/docs-images/71/65982389/images/4-6.jpg "767 0.467 1.63 24.28 PCA-Single-res 0.788 0.466 0.04 989.5 PCA-Multi-res 0.808 0.507 0.26 152.23 SED1 [3] Exact-KNN 0.838 0.575 42.63 1 Approx-KNN [18] 0.826 0.6 1.59 26.")
![84 PCA-Single-res 0.842 0.58 0.04 1068.37 PCA-Multi-res 0.849 0.602 0.3 142.1 MSRA [15] Exact-KNN 0.855 0.628 39.64 1 Approx-KNN [18] 0.858 0.648 1.56 25.](/docs-images/71/65982389/images/4-7.jpg "41 PCA-Single-res 0.85 0.619 0.03 1321.33 PCA-Multi-res 0.893 0.723 0.25 158.56 Table 1.")
, on a Pentium 2.5GHz CPU, 4GB RAM.")

). By using multiple resolutions, our PCA approach leads to much finer results, while still being orders of magnitude faster than the KNN approaches. 2.")
4 Average Non-distinct Distinct patch p A patch patch (a) (b) Pattern distinctness P (c) Figure 5. The principal components: (a) An image with its average patch and samples of a non-distinct and a distinct patch. (b) Our pattern distinctness P. (c) The absolute value of the top six principal components, added to the red patch along the PCA path to p A. It can be seen that the path from the red patch to p A adds patterns that can be found in the image. in comparison to the k-nearest patches approach. To compute the PCA, we use only patches that contain patterns and ignore homogeneous patches. To quickly reject homogeneous regions we compute SLIC super-pixels [2] and keep the 25% with highest variance. We then take all the patches from within these super-pixels and use them to compute the PCA. We compare our accuracy and run-times against those of the k-nearest neighbours approach, using both accurate and approximate search [18]. The evaluation was performed on three well known datasets [1, 3, 15]. Table 1 summarizes our results. To measure accuracy, we report the Area-Under-the-Curve (AUC) and Average Precision (AP) (the higher the better). In addition, we compare run-times. Our approach is more accurate than both Exact-KNN and Method Accuracy Run time Speedup AUC AP (sec/image) ASD [1] Exact-KNN Approx-KNN [18] PCA-Single-res PCA-Multi-res SED1 [3] Exact-KNN Approx-KNN [18] PCA-Single-res PCA-Multi-res MSRA [15] Exact-KNN Approx-KNN [18] PCA-Single-res PCA-Multi-res Table 1. Accuracy and run-time of pattern distinctness: Our PCA-based approach offers an incredible speedup over the KNN methods, together with an improvement in accuracy. The method was tested on images of a maximal dimension of 150 pixels (excluding the multi-resolution PCA), on a Pentium 2.5GHz CPU, 4GB RAM. Approximate-KNN, while being significantly faster than both. A benefit of a faster solution is enabling analysis of images at higher resolutions. This is crucial for some images, as illustrated in Figure 6. Computing pattern distinctness of the input image leads to mediocre detection results for both KNN approaches (Figure 6(b),(c)) as well as for single resolution PCA (Figure 6(d)). By using multiple resolutions, our PCA approach leads to much finer results, while still being orders of magnitude faster than the KNN approaches Color Distinctness While pattern distinctness identifies the unique patterns in the image, it is not sufficient for all images. This is illustrated in Figure 7(a), where the golden statue is salient only due to its unique color. Much like previous approaches [6, 11], we adopt a two step solution for detecting regions of distinct color. We first segment the image (a) Input (b) Exact-NN [35s] (c) ANN [1.61s] (d) PCA-Single [0.04s] (e) PCA-Multi [0.3s] Figure 6. Processing at high resolution results in higher accuracy: Thanks to the efficiency of our PCA approach, we are able to process images at multiple higher resolutions leading to improved accuracy, while maintaining significantly lower run-times.
 that is the weighted sum of all the Gaussians.")

5 corresponding to its threshold value. In addition, to accommodate for the center prior, we further add a Gaussian at the center of the image with an associated weight of 5. We then generate a weight map G(px ) that is the weighted sum of all the Gaussians. Our final saliency map S(px ) is a simple product between the distinctness map and the Gaussian weight map: (a) Input (b) Color distinctness Figure 7. Color distinctness: Color is a crucial cue in image saliency. In this particular image, due solely to color distinctness, the golden statue catchs our attention. into regions and then determine which regions are distinct in color. The first step is solved by using the SLIC superpixels [2], already computed in Section 2.1 to construct the PCA basis. We solve the second step by defining the color distinctness of a region as the sum of L2 distances from all other regions in CIE LAB color-space. Given M regions, the color distinctness of region rx is computed by: C(rx ) = M X S(px ) = G(px ) D(px ). (5) We present a few examples of our saliency detection in Figure 8. We note that none of the three considerations: pattern, color or organization (Figures 8(b,c,e)), suffices to achieve a good detection. The pattern distinctness suffers from non-salient distinct patterns, such as the fish drawings on the blue wall (top row). The color distinctness may capture background colors, such as the sky in the penguin road sign (bottom row). The organization map offers a fuzzy map. Yet, by combining the three maps, a high quality detection is achieved (f). 3. Empirical evaluation rx ri 2. (3) i=1 This calculation is efficient due to the relatively small number of SLIC regions in most images. For further robustness, we compute color distinctness at three resolutions: 100%, 50% and 25% and average them. Figure 7(b) demonstrates a result of our color distinctness. The golden statue was properly detected, however, also a meaningless dark gap between the statues was detected as distinct in color Putting it all together We seek regions that are salient in both color and pattern. Therefore, to integrate color and pattern distinctness we simply take the product of the two: D(px ) = P (px ) C(px ). (4) This map is normalized to the range [0, 1]. To further refine our results, we next incorporate known priors on image organization. First, we note that the salient pixels tend to be grouped together into clusters, as they typically correspond to real objects in the scene. Furthermore, as was shown by [7, 12, 14], people have a tendency to place the subject of the photograph near the center of the image. To take these observations under consideration, we do the following. We start by detecting the clusters of distinct pixels by iteratively thresholding the distinctness map D(px ) using 10 regularly spaced thresholds between 0 and 1. We compute the center-of-mass of each threshold result and place a Gaussian with σ = at its location. We associate with each of these Gaussians an importance weight, To evaluate our approach, we compare it to the state-ofthe-art according to the benchmark proposed just recently in [4]. This benchmark suggests five well accepted datasets: 1. MSRA [15]: 5,000 images labeled by nine users. Salient objects were marked by a bounding box. 2. ASD [1]: 1000 images from the MSRA dataset, for which a more refined manually-segmented groundtruth was created. 3. SED1 [3]: 100 images of a single salient object annotated manually by three users. 4. SED2 [3]: 100 images of two salient objects annotated manually by three users. 5. SOD [17]: 300 images taken from the Berkeley Segmentation Dataset for which seven users selected the boundaries of the salient objects. According to [4], the Top-4 highest scoring salient object detection algorithms are: SVO [5], CR [6], CNTX [9], and CBS [11]. Therefore, we compare our results to theirs. Accuracy: Figure 9 shows the Area-under-the-curve scores for each of the datasets and an overall score of the combined performance over all of the datasets. Unlike the Top-4 approaches, which perform well on a single dataset and less so on others, our approach significantly outperforms all other methods on all of the datasets (Table 2). To further evaluate our method, we test it on the dataset of Judd et al. [12]. This dataset is aimed at gaze-prediction, which differs from our task of salient object detection. Still, we show in Figure 10 that our method offers comparable results to the best performing algorithm of the Top-4 [5].
 Pattern & Color (e)")

 and its color")
 and")
, to obtain our final saliency")





 scores of the Top-4")
![algorithms [4] and ours on five well known](/docs-images/71/65982389/images/6-12.jpg "datasets.")




![Top-4 is RC [6], but it is ranked lowest in](/docs-images/71/65982389/images/6-17.jpg "Table 2.")


6 (a) Input (b) Pattern distinctness (c) Color distinctness (d) Pattern & Color (e) Organization priors (f) Final saliency Figure 8. Combining the three considerations is essential: Given an input image (a), we compute for each pixel its pattern distinctness (b) and its color distinctness (c). The two distinctness maps are combined (d) and then integrated with priors of image organization (e), to obtain our final saliency results in (f). As can be seen, the final saliency maps are more accurate than each of the components. Rank Datasets MSRA ASD SED1 SED2 SOD Overall Ours Ours Ours Ours Ours Ours CBS CBS CNTX RC SVO SVO SVO SVO SVO CNTX CNTX CBS CNTX RC CBS SVO RC CNTX RC CNTX RC CBS CBS RC Table 2. Algorithm ranking: Our method outperforms all other methods on all datasets as well as in the overall score. Figure 9. Detection accuracy: We present Area-Under-the-Curve (AUC) scores of the Top-4 algorithms [4] and ours on five well known datasets. Our approach outperforms all other algorithms on all the datasets and in the overall score. Run-time: Typically, more accurate results are achieved at the cost of a longer run-time. However, this is not our case, as we achieve the most accurate results, while maintaining low run-times, as demonstrated in Figure 11. In particular, the fastest algorithm among the Top-4 is RC [6], but it is ranked lowest in Table 2. The most accurate algorithm among the Top-4 is SVO [5], but its running times Figure 10. Gaze Prediction: Our approach offers comparable results on the gaze-prediction dataset of Judd et. al [12] to that of the top scoring method, SVO [5]. are significantly longer than others (over one minute per image). Such long processing time could render it inapplicable for some applications. Our method, on the other hand, provides even higher accuracy than SVO, while maintaining a
7 tools. Acknowledgements: This research was supported in part by the the Intel Collaborative Research Institute for Computational Intelligence (ICRI-CI), Microsoft, Minerva funding, the Ollendorff foundation and the Israel Science Foundation under Grant 1179/11. References Figure 11. Run-time: Our method has a good average runtime per image, compared to the state-of-the-art techniques, while achieving higher accuracy. The reported run-times were computed on the SED1 dataset [3], on a Pentium 2.5GHz CPU, 4GB RAM. reasonable run-time of 3.5 seconds per image. Qualitative evaluation: Figure 12 presents a qualitative comparison of our method with the current state-of-the-art. It can be seen that while SVO [5] detects the salient regions, parts of the background are erroneously detected as salient. By relying solely on color, RC [6] can mistakenly focus on distinct background colors, e.g., the shadow of the animal is captured instead of the animal itself. Conversely, CNTX [9] relies mostly on patterns, hence, it detects the outlines of the flower and the cat, while missing their interior. The CBS method [11] relies on shape priors and therefore often detects only parts of the salient objects (e.g., the flower) or convex background regions (e.g., the water of the harbor). Our method integrates color and pattern distinctness, and hence captures both the outline, as well as the inner pixels of the salient objects. We do not make any assumptions on the shape of the salient regions, hence, we can handle convex as well as concave shapes. 4. Conclusion Let s go back to the title of this paper and ask ourselves what makes a patch distinct. In this paper we have shown that the statistics of patches in the image plays a central role in identifying the salient patches. We made use of the patch distribution for computing pattern distinctness via PCA. We have shown that we outperform the state-of-art results, while not sacrificing too much run-time. This is done by combining our novel pattern distinctness estimation with standard techniques for color uniqueness and organization priors. A drawback of our algorithm is not using hight-level cues, such as face detection or object recognition. This can be easily addressed, by adding off-the-shelf recognition [1] R. Achanta, S. Hemami, F. Estrada, and S. Susstrunk. Frequencytuned salient region detection. In CVPR, pages , , 4, 5 [2] R. Achanta, A. Shaji, K. Smith, A. Lucchi, P. Fua, and S. Süsstrunk. Slic superpixels. Technical Report EPFL, (June), , 5 [3] S. Alpert, M. Galun, R. Basri, and A. Brandt. Image segmentation by probabilistic bottom-up aggregation and cue integration. In CVPR, pages 1 8, June , 5, 7 [4] A. Borji, D. Sihite, and L. Itti. Salient object detection: A benchmark. In ECCV, pages , , 2, 5, 6, 8 [5] K. Chang, T. Liu, H. Chen, and S. Lai. Fusing generic objectness and visual saliency for salient object detection. In ICCV, pages , , 2, 3, 5, 6, 7, 8 [6] M.-M. Cheng, G.-X. Zhang, N. J. Mitra, X. Huang, and S.-M. Hu. Global contrast based salient region detection. In CVPR, pages , , 4, 5, 6, 7, 8 [7] F. Durand, T. Judd, F. Durand, A. Torralba, et al. A benchmark of computational models of saliency to predict human fixations. Technical report, MIT, [8] S. Goferman, A. Tal, and L. Zelnik-Manor. Puzzle-like collage. Computer Graphics Forum, 29: , [9] S. Goferman, L. Zelnik-Manor, and A. Tal. Context-aware saliency detection. In CVPR, pages , , 2, 3, 5, 7, 8 [10] L. Itti. Automatic foveation for video compression using a neurobiological model of visual attention. IEEE Transactions on Image Processing, 13(10): , [11] H. Jiang, J. Wang, Z. Yuan, T. Liu, N. Zheng, and S. Li. Automatic salient object segmentation based on context and shape prior. In BMVC, page 7, , 4, 5, 7, 8 [12] T. Judd, K. Ehinger, F. Durand, and A. Torralba. Learning to predict where humans look. In ICCV, pages , , 6 [13] C. Kanan and G. Cottrell. Robust classification of objects, faces, and flowers using natural image statistics. In CVPR, pages , [14] T. Liu, S. Slotnick, J. Serences, and S. Yantis. Cortical mechanisms of feature-based attentional control. Cerebral Cortex, 13(12): , [15] T. Liu, Z. Yuan, J. Sun, J. Wang, N. Zheng, X. Tang, and H. Shum. Learning to detect a salient object. PAMI, pages , , 5 [16] Y. Ma, X. Hua, L. Lu, and H. Zhang. A generic framework of user attention model and its application in video summarization. IEEE Transactions on Multimedia, 7(5): , [17] V. Movahedi and J. Elder. Design and perceptual validation of performance measures for salient object segmentation. In CVPRW, pages 49 56, [18] M. Muja and D. G. Lowe. Fast approximate nearest neighbors with automatic algorithm configuration. In VISSAPP, pages IN- STICC Press, [19] H. Seo and P. Milanfar. Static and space-time visual saliency detection by self-resemblance. Journal of Vision, 9(12), , 3 [20] P. Soille. Morphological image analysis: principles and applications. Springer-Verlag New York, Inc.,


 Input")
")
![RC [6]](/docs-images/71/65982389/images/8-4.jpg "(d) CNTX")
![[9] (e)](/docs-images/71/65982389/images/8-5.jpg "CBS [11]")













































8 ASD ASD MSRA MSRA SED1 SED1 SED2 SED2 SOD SOD (a) Input (b) SVO [5] (c) RC [6] (d) CNTX [9] (e) CBS [11] (f) Ours Figure 12. Qualitative comparison. Salient object detection results on ten example images, two from each dataset in the benchmark of [4]. It can be seen that our results are consistently more accurate than those of other methods.
Supplementary Materials for Salient Object Detection: A
 Supplementary Materials for Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang, Zejian Yuan, Ming-Ming Cheng, Yihong Gong Nanning Zheng, and Jingdong Wang Abstract
Supplementary Materials for Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang, Zejian Yuan, Ming-Ming Cheng, Yihong Gong Nanning Zheng, and Jingdong Wang Abstract
How to Evaluate Foreground Maps?
 How to Evaluate Foreground Maps? Ran Margolin Technion Haifa, Israel margolin@tx.technion.ac.il Lihi Zelnik-Manor Technion Haifa, Israel lihi@ee.technion.ac.il Ayellet Tal Technion Haifa, Israel ayellet@ee.technion.ac.il
How to Evaluate Foreground Maps? Ran Margolin Technion Haifa, Israel margolin@tx.technion.ac.il Lihi Zelnik-Manor Technion Haifa, Israel lihi@ee.technion.ac.il Ayellet Tal Technion Haifa, Israel ayellet@ee.technion.ac.il
Supplementary Material for submission 2147: Traditional Saliency Reloaded: A Good Old Model in New Shape
 Supplementary Material for submission 247: Traditional Saliency Reloaded: A Good Old Model in New Shape Simone Frintrop, Thomas Werner, and Germán M. García Institute of Computer Science III Rheinische
Supplementary Material for submission 247: Traditional Saliency Reloaded: A Good Old Model in New Shape Simone Frintrop, Thomas Werner, and Germán M. García Institute of Computer Science III Rheinische
Data-driven Saliency Region Detection Based on Undirected Graph Ranking
 Data-driven Saliency Region Detection Based on Undirected Graph Ranking Wenjie Zhang ; Qingyu Xiong 2 ; Shunhan Chen 3 College of Automation, 2 the School of Software Engineering, 3 College of Information
Data-driven Saliency Region Detection Based on Undirected Graph Ranking Wenjie Zhang ; Qingyu Xiong 2 ; Shunhan Chen 3 College of Automation, 2 the School of Software Engineering, 3 College of Information
Unsupervised Saliency Estimation based on Robust Hypotheses
 Utah State University DigitalCommons@USU Computer Science Faculty and Staff Publications Computer Science 3-2016 Unsupervised Saliency Estimation based on Robust Hypotheses Fei Xu Utah State University,
Utah State University DigitalCommons@USU Computer Science Faculty and Staff Publications Computer Science 3-2016 Unsupervised Saliency Estimation based on Robust Hypotheses Fei Xu Utah State University,
Synthetic Saliency. Ben Weems Stanford University. Anthony Perez Stanford University. Karan Rai Stanford University. Abstract. 1.
 Synthetic Saliency Anthony Perez Stanford University aperez8@stanford.edu Karan Rai Stanford University karanrai@stanford.edu Ben Weems Stanford University bweems@stanford.edu Abstract There are many existing
Synthetic Saliency Anthony Perez Stanford University aperez8@stanford.edu Karan Rai Stanford University karanrai@stanford.edu Ben Weems Stanford University bweems@stanford.edu Abstract There are many existing
SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION.
 SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION Jingfan Guo,2, Tongwei Ren,2,, Jia Bei,2 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 Software Institute,
SALIENT OBJECT DETECTION FOR RGB-D IMAGE VIA SALIENCY EVOLUTION Jingfan Guo,2, Tongwei Ren,2,, Jia Bei,2 State Key Laboratory for Novel Software Technology, Nanjing University, China 2 Software Institute,
Saliency Detection via Graph-Based Manifold Ranking
 Saliency Detection via Graph-Based Manifold Ranking Chuan Yang, Lihe Zhang, Huchuan Lu, Xiang Ruan 2, and Ming-Hsuan Yang 3 Dalian University of Technology 2 OMRON Corporation 3 University of California
Saliency Detection via Graph-Based Manifold Ranking Chuan Yang, Lihe Zhang, Huchuan Lu, Xiang Ruan 2, and Ming-Hsuan Yang 3 Dalian University of Technology 2 OMRON Corporation 3 University of California
IMAGE SALIENCY DETECTION VIA MULTI-SCALE STATISTICAL NON-REDUNDANCY MODELING. Christian Scharfenberger, Aanchal Jain, Alexander Wong, and Paul Fieguth
 IMAGE SALIENCY DETECTION VIA MULTI-SCALE STATISTICAL NON-REDUNDANCY MODELING Christian Scharfenberger, Aanchal Jain, Alexander Wong, and Paul Fieguth Department of Systems Design Engineering, University
IMAGE SALIENCY DETECTION VIA MULTI-SCALE STATISTICAL NON-REDUNDANCY MODELING Christian Scharfenberger, Aanchal Jain, Alexander Wong, and Paul Fieguth Department of Systems Design Engineering, University
Saliency Detection via Dense and Sparse Reconstruction
 23 IEEE International Conference on Computer Vision Saliency Detection via Dense and Sparse Reconstruction Xiaohui Li, Huchuan Lu, Lihe Zhang, Xiang Ruan 2, and Ming-Hsuan Yang 3 Dalian University of Technology
23 IEEE International Conference on Computer Vision Saliency Detection via Dense and Sparse Reconstruction Xiaohui Li, Huchuan Lu, Lihe Zhang, Xiang Ruan 2, and Ming-Hsuan Yang 3 Dalian University of Technology
Saliency Detection for Videos Using 3D FFT Local Spectra
 Saliency Detection for Videos Using 3D FFT Local Spectra Zhiling Long and Ghassan AlRegib School of Electrical and Computer Engineering, Georgia Institute of Technology, Atlanta, GA 30332, USA ABSTRACT
Saliency Detection for Videos Using 3D FFT Local Spectra Zhiling Long and Ghassan AlRegib School of Electrical and Computer Engineering, Georgia Institute of Technology, Atlanta, GA 30332, USA ABSTRACT
Salient Object Detection: A Discriminative Regional Feature Integration Approach
 23 IEEE Conference on Computer Vision and Pattern Recognition Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang Jingdong Wang Zejian Yuan Yang Wu Nanning Zheng
23 IEEE Conference on Computer Vision and Pattern Recognition Salient Object Detection: A Discriminative Regional Feature Integration Approach Huaizu Jiang Jingdong Wang Zejian Yuan Yang Wu Nanning Zheng
FASA: Fast, Accurate, and Size-Aware Salient Object Detection
 FASA: Fast, Accurate, and Size-Aware Salient Object Detection Gökhan Yildirim, Sabine Süsstrunk School of Computer and Communication Sciences École Polytechnique Fédérale de Lausanne Abstract. Fast and
FASA: Fast, Accurate, and Size-Aware Salient Object Detection Gökhan Yildirim, Sabine Süsstrunk School of Computer and Communication Sciences École Polytechnique Fédérale de Lausanne Abstract. Fast and
Video saliency detection by spatio-temporal sampling and sparse matrix decomposition
 Video saliency detection by spatio-temporal sampling and sparse matrix decomposition * Faculty of Information Science and Engineering Ningbo University Ningbo 315211 CHINA shaofeng@nbu.edu.cn Abstract:
Video saliency detection by spatio-temporal sampling and sparse matrix decomposition * Faculty of Information Science and Engineering Ningbo University Ningbo 315211 CHINA shaofeng@nbu.edu.cn Abstract:
Image Resizing Based on Gradient Vector Flow Analysis
 Image Resizing Based on Gradient Vector Flow Analysis Sebastiano Battiato battiato@dmi.unict.it Giovanni Puglisi puglisi@dmi.unict.it Giovanni Maria Farinella gfarinellao@dmi.unict.it Daniele Ravì rav@dmi.unict.it
Image Resizing Based on Gradient Vector Flow Analysis Sebastiano Battiato battiato@dmi.unict.it Giovanni Puglisi puglisi@dmi.unict.it Giovanni Maria Farinella gfarinellao@dmi.unict.it Daniele Ravì rav@dmi.unict.it
Main Subject Detection via Adaptive Feature Selection
 Main Subject Detection via Adaptive Feature Selection Cuong Vu and Damon Chandler Image Coding and Analysis Lab Oklahoma State University Main Subject Detection is easy for human 2 Outline Introduction
Main Subject Detection via Adaptive Feature Selection Cuong Vu and Damon Chandler Image Coding and Analysis Lab Oklahoma State University Main Subject Detection is easy for human 2 Outline Introduction
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
A New Framework for Multiscale Saliency Detection Based on Image Patches
 Neural Process Lett (2013) 38:361 374 DOI 10.1007/s11063-012-9276-3 A New Framework for Multiscale Saliency Detection Based on Image Patches Jingbo Zhou Zhong Jin Published online: 8 January 2013 Springer
Neural Process Lett (2013) 38:361 374 DOI 10.1007/s11063-012-9276-3 A New Framework for Multiscale Saliency Detection Based on Image Patches Jingbo Zhou Zhong Jin Published online: 8 January 2013 Springer
Image Compression and Resizing Using Improved Seam Carving for Retinal Images
 Image Compression and Resizing Using Improved Seam Carving for Retinal Images Prabhu Nayak 1, Rajendra Chincholi 2, Dr.Kalpana Vanjerkhede 3 1 PG Student, Department of Electronics and Instrumentation
Image Compression and Resizing Using Improved Seam Carving for Retinal Images Prabhu Nayak 1, Rajendra Chincholi 2, Dr.Kalpana Vanjerkhede 3 1 PG Student, Department of Electronics and Instrumentation
Hierarchical Saliency Detection Supplementary Material
 Hierarchical Saliency Detection Supplementary Material Qiong Yan Li Xu Jianping Shi Jiaya Jia The Chinese University of Hong Kong {qyan,xuli,pshi,leoia}@cse.cuhk.edu.hk http://www.cse.cuhk.edu.hk/leoia/proects/hsaliency/
Hierarchical Saliency Detection Supplementary Material Qiong Yan Li Xu Jianping Shi Jiaya Jia The Chinese University of Hong Kong {qyan,xuli,pshi,leoia}@cse.cuhk.edu.hk http://www.cse.cuhk.edu.hk/leoia/proects/hsaliency/
Saliency Detection via Nonlocal L 0 Minimization
 Saliency Detection via Nonlocal L 0 Minimization Yiyang Wang, Risheng Liu 2, Xiaoliang Song, and Zhixun Su School of Mathematical Sciences, Dalian University of Technology, China 2 School of Software Technology,
Saliency Detection via Nonlocal L 0 Minimization Yiyang Wang, Risheng Liu 2, Xiaoliang Song, and Zhixun Su School of Mathematical Sciences, Dalian University of Technology, China 2 School of Software Technology,
Salient Region Detection via High-Dimensional Color Transform
 Salient Region Detection via High-Dimensional Color Transform Jiwhan Kim Dongyoon Han Yu-Wing Tai Junmo Kim Department of Electrical Engineering Korea Advanced Institute of Science and Technology (KAIST)
Salient Region Detection via High-Dimensional Color Transform Jiwhan Kim Dongyoon Han Yu-Wing Tai Junmo Kim Department of Electrical Engineering Korea Advanced Institute of Science and Technology (KAIST)
Saliency Detection with Flash and No-flash Image Pairs
 Saliency Detection with Flash and No-flash Image Pairs Shengfeng He and Rynson W.H. Lau Department of Computer Science City University of Hong Kong shengfeng he@yahoo.com, rynson.lau@cityu.edu.hk Abstract.
Saliency Detection with Flash and No-flash Image Pairs Shengfeng He and Rynson W.H. Lau Department of Computer Science City University of Hong Kong shengfeng he@yahoo.com, rynson.lau@cityu.edu.hk Abstract.
SUPERPIXELS: THE END OF PIXELS IN OBIA. A COMPARISON OF STATE-OF-THE- ART SUPERPIXEL METHODS FOR REMOTE SENSING DATA
 SUPERPIXELS: THE END OF PIXELS IN OBIA. A COMPARISON OF STATE-OF-THE- ART SUPERPIXEL METHODS FOR REMOTE SENSING DATA O. Csillik * Department of Geoinformatics Z_GIS, University of Salzburg, 5020, Salzburg,
SUPERPIXELS: THE END OF PIXELS IN OBIA. A COMPARISON OF STATE-OF-THE- ART SUPERPIXEL METHODS FOR REMOTE SENSING DATA O. Csillik * Department of Geoinformatics Z_GIS, University of Salzburg, 5020, Salzburg,
2.1 Optimized Importance Map
 3rd International Conference on Multimedia Technology(ICMT 2013) Improved Image Resizing using Seam Carving and scaling Yan Zhang 1, Jonathan Z. Sun, Jingliang Peng Abstract. Seam Carving, the popular
3rd International Conference on Multimedia Technology(ICMT 2013) Improved Image Resizing using Seam Carving and scaling Yan Zhang 1, Jonathan Z. Sun, Jingliang Peng Abstract. Seam Carving, the popular
Fast and Efficient Saliency Detection Using Sparse Sampling and Kernel Density Estimation
 Fast and Efficient Saliency Detection Using Sparse Sampling and Kernel Density Estimation Hamed Rezazadegan Tavakoli, Esa Rahtu, and Janne Heikkilä Machine Vision Group, Department of Electrical and Information
Fast and Efficient Saliency Detection Using Sparse Sampling and Kernel Density Estimation Hamed Rezazadegan Tavakoli, Esa Rahtu, and Janne Heikkilä Machine Vision Group, Department of Electrical and Information
Object and Action Detection from a Single Example
 Object and Action Detection from a Single Example Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Hae Jong Seo AFOSR Program Review, June 4-5, 29 Take a look at this:
Object and Action Detection from a Single Example Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Hae Jong Seo AFOSR Program Review, June 4-5, 29 Take a look at this:
Salient Region Detection and Segmentation
 Salient Region Detection and Segmentation Radhakrishna Achanta, Francisco Estrada, Patricia Wils, and Sabine Süsstrunk School of Computer and Communication Sciences (I&C), Ecole Polytechnique Fédérale
Salient Region Detection and Segmentation Radhakrishna Achanta, Francisco Estrada, Patricia Wils, and Sabine Süsstrunk School of Computer and Communication Sciences (I&C), Ecole Polytechnique Fédérale
Salient Region Detection and Segmentation in Images using Dynamic Mode Decomposition
 Salient Region Detection and Segmentation in Images using Dynamic Mode Decomposition Sikha O K 1, Sachin Kumar S 2, K P Soman 2 1 Department of Computer Science 2 Centre for Computational Engineering and
Salient Region Detection and Segmentation in Images using Dynamic Mode Decomposition Sikha O K 1, Sachin Kumar S 2, K P Soman 2 1 Department of Computer Science 2 Centre for Computational Engineering and
Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment. Abstract:
 Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment Abstract: In order to perform residential roof condition assessment with very-high-resolution airborne imagery,
Title: Adaptive Region Merging Segmentation of Airborne Imagery for Roof Condition Assessment Abstract: In order to perform residential roof condition assessment with very-high-resolution airborne imagery,
Superpixel Segmentation using Depth
 Superpixel Segmentation using Depth Information Superpixel Segmentation using Depth Information David Stutz June 25th, 2014 David Stutz June 25th, 2014 01 Introduction - Table of Contents 1 Introduction
Superpixel Segmentation using Depth Information Superpixel Segmentation using Depth Information David Stutz June 25th, 2014 David Stutz June 25th, 2014 01 Introduction - Table of Contents 1 Introduction
Saliency Detection in Aerial Imagery
 Saliency Detection in Aerial Imagery using Multi-scale SLIC Segmentation Samir Sahli 1, Daniel A. Lavigne 2 and Yunlong Sheng 1 1- COPL, Image Science group, Laval University, Quebec, Canada 2- Defence
Saliency Detection in Aerial Imagery using Multi-scale SLIC Segmentation Samir Sahli 1, Daniel A. Lavigne 2 and Yunlong Sheng 1 1- COPL, Image Science group, Laval University, Quebec, Canada 2- Defence
Adaptive Multi-Level Region Merging for Salient Object Detection
 FU, et al: ADAPTIVE MULTI-LEVEL REGION MERGING FOR SALIENT OBJECT DETECTION Adaptive Multi-Level Region Merging for Salient Object Detection Keren Fu,2 fkrsuper@sjtu.edu.cn,keren@chalmers.se Chen Gong
FU, et al: ADAPTIVE MULTI-LEVEL REGION MERGING FOR SALIENT OBJECT DETECTION Adaptive Multi-Level Region Merging for Salient Object Detection Keren Fu,2 fkrsuper@sjtu.edu.cn,keren@chalmers.se Chen Gong
Robust and Efficient Saliency Modeling from Image Co-Occurrence Histograms
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 36, NO. 1, JANUARY 2014 195 Robust and Efficient Saliency Modeling from Image Co-Occurrence Histograms Shijian Lu, Cheston Tan, and
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 36, NO. 1, JANUARY 2014 195 Robust and Efficient Saliency Modeling from Image Co-Occurrence Histograms Shijian Lu, Cheston Tan, and
Graph based Image Segmentation using improved SLIC Superpixel algorithm
 Graph based Image Segmentation using improved SLIC Superpixel algorithm Prasanna Regmi 1, B.J.M. Ravi Kumar 2 1 Computer Science and Systems Engineering, Andhra University, AP, India 2 Computer Science
Graph based Image Segmentation using improved SLIC Superpixel algorithm Prasanna Regmi 1, B.J.M. Ravi Kumar 2 1 Computer Science and Systems Engineering, Andhra University, AP, India 2 Computer Science
Combining Top-down and Bottom-up Segmentation
 Combining Top-down and Bottom-up Segmentation Authors: Eran Borenstein, Eitan Sharon, Shimon Ullman Presenter: Collin McCarthy Introduction Goal Separate object from background Problems Inaccuracies Top-down
Combining Top-down and Bottom-up Segmentation Authors: Eran Borenstein, Eitan Sharon, Shimon Ullman Presenter: Collin McCarthy Introduction Goal Separate object from background Problems Inaccuracies Top-down
How Important is Location in Saliency Detection
 ACM International Conference on Internet Multimedia Computing and Service How Important is Location in Saliency Detection Tongwei Ren 1, Ran Ju 1, Yan Liu 2, Gangshan Wu 1 1 State Key Laboratory for Novel
ACM International Conference on Internet Multimedia Computing and Service How Important is Location in Saliency Detection Tongwei Ren 1, Ran Ju 1, Yan Liu 2, Gangshan Wu 1 1 State Key Laboratory for Novel
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Speaker: Ming-Ming Cheng Nankai University 15-Sep-17 Towards Weakly Supervised Image Understanding
 Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
Towards Weakly Supervised Image Understanding (WSIU) Speaker: Ming-Ming Cheng Nankai University http://mmcheng.net/ 1/50 Understanding Visual Information Image by kirkh.deviantart.com 2/50 Dataset Annotation
Salient Region Detection by UFO: Uniqueness, Focusness and Objectness
 2013 IEEE International Conference on Computer Vision Salient Region Detection by UFO: Uniqueness, Focusness and Objectness Peng Jiang 1 Haibin Ling 2 Jingyi Yu 3 Jingliang Peng 1 1 School of Computer
2013 IEEE International Conference on Computer Vision Salient Region Detection by UFO: Uniqueness, Focusness and Objectness Peng Jiang 1 Haibin Ling 2 Jingyi Yu 3 Jingliang Peng 1 1 School of Computer
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Structure-measure: A New Way to Evaluate Foreground Maps
 Structure-measure: A New Way to Evaluate Foreground Maps Deng-Ping Fan 1 Ming-Ming Cheng 1 Yun Liu 1 Tao Li 1 Ali Borji 2 1 CCCE, Nankai University 2 CRCV, UCF http://dpfan.net/smeasure/ Abstract Foreground
Structure-measure: A New Way to Evaluate Foreground Maps Deng-Ping Fan 1 Ming-Ming Cheng 1 Yun Liu 1 Tao Li 1 Ali Borji 2 1 CCCE, Nankai University 2 CRCV, UCF http://dpfan.net/smeasure/ Abstract Foreground
Augmenting Salient Foreground Detection using Fiedler Vector for Multi-Object Segmentation
 https://doi.org/10.2352/issn.2470-1173.2017.17.coimg-433 2017, Society for Imaging Science and Technology Augmenting Salient Foreground Detection using Fiedler Vector for Multi-Object Segmentation Michal
https://doi.org/10.2352/issn.2470-1173.2017.17.coimg-433 2017, Society for Imaging Science and Technology Augmenting Salient Foreground Detection using Fiedler Vector for Multi-Object Segmentation Michal
Video annotation based on adaptive annular spatial partition scheme
 Video annotation based on adaptive annular spatial partition scheme Guiguang Ding a), Lu Zhang, and Xiaoxu Li Key Laboratory for Information System Security, Ministry of Education, Tsinghua National Laboratory
Video annotation based on adaptive annular spatial partition scheme Guiguang Ding a), Lu Zhang, and Xiaoxu Li Key Laboratory for Information System Security, Ministry of Education, Tsinghua National Laboratory
DETECTION OF IMAGE PAIRS USING CO-SALIENCY MODEL
 DETECTION OF IMAGE PAIRS USING CO-SALIENCY MODEL N S Sandhya Rani 1, Dr. S. Bhargavi 2 4th sem MTech, Signal Processing, S. J. C. Institute of Technology, Chickballapur, Karnataka, India 1 Professor, Dept
DETECTION OF IMAGE PAIRS USING CO-SALIENCY MODEL N S Sandhya Rani 1, Dr. S. Bhargavi 2 4th sem MTech, Signal Processing, S. J. C. Institute of Technology, Chickballapur, Karnataka, India 1 Professor, Dept
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation
 Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation Alaa E. Abdel-Hakim Electrical Engineering Department Assiut University Assiut, Egypt alaa.aly@eng.au.edu.eg Mostafa Izz Cairo
Graph-Based Superpixel Labeling for Enhancement of Online Video Segmentation Alaa E. Abdel-Hakim Electrical Engineering Department Assiut University Assiut, Egypt alaa.aly@eng.au.edu.eg Mostafa Izz Cairo
Saliency Detection using Region-Based Incremental Center-Surround Distance
 Saliency Detection using Region-Based Incremental Center-Surround Distance Minwoo Park Corporate Research and Engineering Eastman Kodak Company Rochester, NY, USA minwoo.park@kodak.com Mrityunjay Kumar
Saliency Detection using Region-Based Incremental Center-Surround Distance Minwoo Park Corporate Research and Engineering Eastman Kodak Company Rochester, NY, USA minwoo.park@kodak.com Mrityunjay Kumar
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Detecting Salient Contours Using Orientation Energy Distribution. Part I: Thresholding Based on. Response Distribution
 Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Improved Coding for Image Feature Location Information
 Improved Coding for Image Feature Location Information Sam S. Tsai, David Chen, Gabriel Takacs, Vijay Chandrasekhar Mina Makar, Radek Grzeszczuk, and Bernd Girod Department of Electrical Engineering, Stanford
Improved Coding for Image Feature Location Information Sam S. Tsai, David Chen, Gabriel Takacs, Vijay Chandrasekhar Mina Makar, Radek Grzeszczuk, and Bernd Girod Department of Electrical Engineering, Stanford
Superpixels Generating from the Pixel-based K-Means Clustering
 Superpixels Generating from the Pixel-based K-Means Clustering Shang-Chia Wei, Tso-Jung Yen Institute of Statistical Science Academia Sinica Taipei, Taiwan 11529, R.O.C. wsc@stat.sinica.edu.tw, tjyen@stat.sinica.edu.tw
Superpixels Generating from the Pixel-based K-Means Clustering Shang-Chia Wei, Tso-Jung Yen Institute of Statistical Science Academia Sinica Taipei, Taiwan 11529, R.O.C. wsc@stat.sinica.edu.tw, tjyen@stat.sinica.edu.tw
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
The Vehicle Logo Location System based on saliency model
 ISSN 746-7659, England, UK Journal of Information and Computing Science Vol. 0, No. 3, 205, pp. 73-77 The Vehicle Logo Location System based on saliency model Shangbing Gao,2, Liangliang Wang, Hongyang
ISSN 746-7659, England, UK Journal of Information and Computing Science Vol. 0, No. 3, 205, pp. 73-77 The Vehicle Logo Location System based on saliency model Shangbing Gao,2, Liangliang Wang, Hongyang
CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION
 CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION 6.1 INTRODUCTION Fuzzy logic based computational techniques are becoming increasingly important in the medical image analysis arena. The significant
CHAPTER 6 MODIFIED FUZZY TECHNIQUES BASED IMAGE SEGMENTATION 6.1 INTRODUCTION Fuzzy logic based computational techniques are becoming increasingly important in the medical image analysis arena. The significant
AS a subfield of computer vision and pattern recognition,
 1 Saliency Detection with Spaces of Background-based Distribution Tong Zhao, Lin Li, Xinghao Ding, Yue Huang and Delu Zeng* arxiv:1603.05335v1 [cs.cv] 17 Mar 2016 Abstract In this letter, an effective
1 Saliency Detection with Spaces of Background-based Distribution Tong Zhao, Lin Li, Xinghao Ding, Yue Huang and Delu Zeng* arxiv:1603.05335v1 [cs.cv] 17 Mar 2016 Abstract In this letter, an effective
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach
 Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Human Detection and Tracking for Video Surveillance: A Cognitive Science Approach Vandit Gajjar gajjar.vandit.381@ldce.ac.in Ayesha Gurnani gurnani.ayesha.52@ldce.ac.in Yash Khandhediya khandhediya.yash.364@ldce.ac.in
Inital Starting Point Analysis for K-Means Clustering: A Case Study
 lemson University TigerPrints Publications School of omputing 3-26 Inital Starting Point Analysis for K-Means lustering: A ase Study Amy Apon lemson University, aapon@clemson.edu Frank Robinson Vanderbilt
lemson University TigerPrints Publications School of omputing 3-26 Inital Starting Point Analysis for K-Means lustering: A ase Study Amy Apon lemson University, aapon@clemson.edu Frank Robinson Vanderbilt
THE human visual system can spot salient objects in a cluttered
 1892 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 39, NO. 9, SEPTEMBER 2017 Ranking Saliency Lihe Zhang, Chuan Yang, Huchuan Lu, Senior Member, IEEE, Xiang Ruan, and Ming-Hsuan
1892 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 39, NO. 9, SEPTEMBER 2017 Ranking Saliency Lihe Zhang, Chuan Yang, Huchuan Lu, Senior Member, IEEE, Xiang Ruan, and Ming-Hsuan
Salient Region Detection using Weighted Feature Maps based on the Human Visual Attention Model
 Salient Region Detection using Weighted Feature Maps based on the Human Visual Attention Model Yiqun Hu 2, Xing Xie 1, Wei-Ying Ma 1, Liang-Tien Chia 2 and Deepu Rajan 2 1 Microsoft Research Asia 5/F Sigma
Salient Region Detection using Weighted Feature Maps based on the Human Visual Attention Model Yiqun Hu 2, Xing Xie 1, Wei-Ying Ma 1, Liang-Tien Chia 2 and Deepu Rajan 2 1 Microsoft Research Asia 5/F Sigma
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Textural Features for Image Database Retrieval
 Textural Features for Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington Seattle, WA 98195-2500 {aksoy,haralick}@@isl.ee.washington.edu
Textural Features for Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington Seattle, WA 98195-2500 {aksoy,haralick}@@isl.ee.washington.edu
Small Object Segmentation Based on Visual Saliency in Natural Images
 J Inf Process Syst, Vol.9, No.4, pp.592-601, December 2013 http://dx.doi.org/10.3745/jips.2013.9.4.592 pissn 1976-913X eissn 2092-805X Small Object Segmentation Based on Visual Saliency in Natural Images
J Inf Process Syst, Vol.9, No.4, pp.592-601, December 2013 http://dx.doi.org/10.3745/jips.2013.9.4.592 pissn 1976-913X eissn 2092-805X Small Object Segmentation Based on Visual Saliency in Natural Images
Automatic Shadow Removal by Illuminance in HSV Color Space
 Computer Science and Information Technology 3(3): 70-75, 2015 DOI: 10.13189/csit.2015.030303 http://www.hrpub.org Automatic Shadow Removal by Illuminance in HSV Color Space Wenbo Huang 1, KyoungYeon Kim
Computer Science and Information Technology 3(3): 70-75, 2015 DOI: 10.13189/csit.2015.030303 http://www.hrpub.org Automatic Shadow Removal by Illuminance in HSV Color Space Wenbo Huang 1, KyoungYeon Kim
Semantics-based Image Retrieval by Region Saliency
 Semantics-based Image Retrieval by Region Saliency Wei Wang, Yuqing Song and Aidong Zhang Department of Computer Science and Engineering, State University of New York at Buffalo, Buffalo, NY 14260, USA
Semantics-based Image Retrieval by Region Saliency Wei Wang, Yuqing Song and Aidong Zhang Department of Computer Science and Engineering, State University of New York at Buffalo, Buffalo, NY 14260, USA
A Graph Theoretic Approach to Image Database Retrieval
 A Graph Theoretic Approach to Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington, Seattle, WA 98195-2500
A Graph Theoretic Approach to Image Database Retrieval Selim Aksoy and Robert M. Haralick Intelligent Systems Laboratory Department of Electrical Engineering University of Washington, Seattle, WA 98195-2500
THE HUMAN visual system interprets the world in a
 1150 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 23, NO. 7, JULY 2013 Visual Saliency by Selective Contrast Qi Wang, Yuan Yuan, Senior Member, IEEE, and Pingkun Yan, Senior Member,
1150 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS FOR VIDEO TECHNOLOGY, VOL. 23, NO. 7, JULY 2013 Visual Saliency by Selective Contrast Qi Wang, Yuan Yuan, Senior Member, IEEE, and Pingkun Yan, Senior Member,
Learning the Three Factors of a Non-overlapping Multi-camera Network Topology
 Learning the Three Factors of a Non-overlapping Multi-camera Network Topology Xiaotang Chen, Kaiqi Huang, and Tieniu Tan National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy
Learning the Three Factors of a Non-overlapping Multi-camera Network Topology Xiaotang Chen, Kaiqi Huang, and Tieniu Tan National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy
EVENT RETRIEVAL USING MOTION BARCODES. Gil Ben-Artzi Michael Werman Shmuel Peleg
 EVENT RETRIEVAL USING MOTION BARCODES Gil Ben-Artzi Michael Werman Shmuel Peleg School of Computer Science and Engineering The Hebrew University of Jerusalem, Israel ABSTRACT We introduce a simple and
EVENT RETRIEVAL USING MOTION BARCODES Gil Ben-Artzi Michael Werman Shmuel Peleg School of Computer Science and Engineering The Hebrew University of Jerusalem, Israel ABSTRACT We introduce a simple and
Focusing Attention on Visual Features that Matter
 TSAI, KUIPERS: FOCUSING ATTENTION ON VISUAL FEATURES THAT MATTER 1 Focusing Attention on Visual Features that Matter Grace Tsai gstsai@umich.edu Benjamin Kuipers kuipers@umich.edu Electrical Engineering
TSAI, KUIPERS: FOCUSING ATTENTION ON VISUAL FEATURES THAT MATTER 1 Focusing Attention on Visual Features that Matter Grace Tsai gstsai@umich.edu Benjamin Kuipers kuipers@umich.edu Electrical Engineering
Image Classification based on Saliency Driven Nonlinear Diffusion and Multi-scale Information Fusion Ms. Swapna R. Kharche 1, Prof.B.K.
 Image Classification based on Saliency Driven Nonlinear Diffusion and Multi-scale Information Fusion Ms. Swapna R. Kharche 1, Prof.B.K.Chaudhari 2 1M.E. student, Department of Computer Engg, VBKCOE, Malkapur
Image Classification based on Saliency Driven Nonlinear Diffusion and Multi-scale Information Fusion Ms. Swapna R. Kharche 1, Prof.B.K.Chaudhari 2 1M.E. student, Department of Computer Engg, VBKCOE, Malkapur
Salient Regions Detection for Indoor Robots using RGB-D Data
 2015 IEEE International Conference on Robotics and Automation (ICRA) Washington State Convention Center Seattle, Washington, May 26-30, 2015 Salient Regions Detection for Indoor Robots using RGB-D Data
2015 IEEE International Conference on Robotics and Automation (ICRA) Washington State Convention Center Seattle, Washington, May 26-30, 2015 Salient Regions Detection for Indoor Robots using RGB-D Data
Outline
 Internship at the project team PULSAR A. Schnaars 1 1 University of Magdeburg Supervisor: Guillaume Charpiat PhD Pulsar - INRIA Sophia-Antipolis INRIA Sophia-Antipolis, 15th march 2010 Outline 1 2 3 4
Internship at the project team PULSAR A. Schnaars 1 1 University of Magdeburg Supervisor: Guillaume Charpiat PhD Pulsar - INRIA Sophia-Antipolis INRIA Sophia-Antipolis, 15th march 2010 Outline 1 2 3 4
SALIENCY CLASSIFICATION OBJECT AND REGION DETECTION USING HDCT METHOD
 Journal of Recent Research in Engineering and Technology, 3(10), OCT 2016, PP.01-12 ISSN (Online): 2349 2252, ISSN (Print):2349 2260 Bonfay Publications, 2016 Research Article SALIENCY CLASSIFICATION OBJECT
Journal of Recent Research in Engineering and Technology, 3(10), OCT 2016, PP.01-12 ISSN (Online): 2349 2252, ISSN (Print):2349 2260 Bonfay Publications, 2016 Research Article SALIENCY CLASSIFICATION OBJECT
DEPT: Depth Estimation by Parameter Transfer for Single Still Images
 DEPT: Depth Estimation by Parameter Transfer for Single Still Images Xiu Li 1, 2, Hongwei Qin 1,2, Yangang Wang 3, Yongbing Zhang 1,2, and Qionghai Dai 1 1. Dept. of Automation, Tsinghua University 2.
DEPT: Depth Estimation by Parameter Transfer for Single Still Images Xiu Li 1, 2, Hongwei Qin 1,2, Yangang Wang 3, Yongbing Zhang 1,2, and Qionghai Dai 1 1. Dept. of Automation, Tsinghua University 2.
DEPT: Depth Estimation by Parameter Transfer for Single Still Images
 DEPT: Depth Estimation by Parameter Transfer for Single Still Images Xiu Li 1,2, Hongwei Qin 1,2(B), Yangang Wang 3, Yongbing Zhang 1,2, and Qionghai Dai 1 1 Department of Automation, Tsinghua University,
DEPT: Depth Estimation by Parameter Transfer for Single Still Images Xiu Li 1,2, Hongwei Qin 1,2(B), Yangang Wang 3, Yongbing Zhang 1,2, and Qionghai Dai 1 1 Department of Automation, Tsinghua University,
Clustering and Visualisation of Data
 Clustering and Visualisation of Data Hiroshi Shimodaira January-March 28 Cluster analysis aims to partition a data set into meaningful or useful groups, based on distances between data points. In some
Clustering and Visualisation of Data Hiroshi Shimodaira January-March 28 Cluster analysis aims to partition a data set into meaningful or useful groups, based on distances between data points. In some
SCALP: Superpixels with Contour Adherence using Linear Path
 SCALP: Superpixels with Contour Adherence using Linear Path Rémi Giraud 1,2 remi.giraud@labri.fr with Vinh-Thong Ta 1 and Nicolas Papadakis 2 1 LaBRI CNRS UMR 5800 - University of Bordeaux, FRANCE PICTURA
SCALP: Superpixels with Contour Adherence using Linear Path Rémi Giraud 1,2 remi.giraud@labri.fr with Vinh-Thong Ta 1 and Nicolas Papadakis 2 1 LaBRI CNRS UMR 5800 - University of Bordeaux, FRANCE PICTURA
Salient Object Detection: A Benchmark
 Salient Object Detection: A Benchmark Ali Borji, Dicky N. Sihite, and Laurent Itti Department of Computer Science, University of Southern California http://ilab.usc.edu/~borji Abstract. Several salient
Salient Object Detection: A Benchmark Ali Borji, Dicky N. Sihite, and Laurent Itti Department of Computer Science, University of Southern California http://ilab.usc.edu/~borji Abstract. Several salient
Correcting User Guided Image Segmentation
 Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Correcting User Guided Image Segmentation Garrett Bernstein (gsb29) Karen Ho (ksh33) Advanced Machine Learning: CS 6780 Abstract We tackle the problem of segmenting an image into planes given user input.
Quasi-thematic Features Detection & Tracking. Future Rover Long-Distance Autonomous Navigation
 Quasi-thematic Feature Detection And Tracking For Future Rover Long-Distance Autonomous Navigation Authors: Affan Shaukat, Conrad Spiteri, Yang Gao, Said Al-Milli, and Abhinav Bajpai Surrey Space Centre,
Quasi-thematic Feature Detection And Tracking For Future Rover Long-Distance Autonomous Navigation Authors: Affan Shaukat, Conrad Spiteri, Yang Gao, Said Al-Milli, and Abhinav Bajpai Surrey Space Centre,
Recognition of the Target Image Based on POM
 Recognition of the Target Image Based on POM R.Haritha Department of ECE SJCET Yemmiganur K.Sudhakar Associate Professor HOD, Department of ECE SJCET Yemmiganur T.Chakrapani Associate Professor Department
Recognition of the Target Image Based on POM R.Haritha Department of ECE SJCET Yemmiganur K.Sudhakar Associate Professor HOD, Department of ECE SJCET Yemmiganur T.Chakrapani Associate Professor Department
Learning video saliency from human gaze using candidate selection
 Learning video saliency from human gaze using candidate selection Rudoy, Goldman, Shechtman, Zelnik-Manor CVPR 2013 Paper presentation by Ashish Bora Outline What is saliency? Image vs video Candidates
Learning video saliency from human gaze using candidate selection Rudoy, Goldman, Shechtman, Zelnik-Manor CVPR 2013 Paper presentation by Ashish Bora Outline What is saliency? Image vs video Candidates
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Accelerating Pattern Matching or HowMuchCanYouSlide?
 Accelerating Pattern Matching or HowMuchCanYouSlide? Ofir Pele and Michael Werman School of Computer Science and Engineering The Hebrew University of Jerusalem {ofirpele,werman}@cs.huji.ac.il Abstract.
Accelerating Pattern Matching or HowMuchCanYouSlide? Ofir Pele and Michael Werman School of Computer Science and Engineering The Hebrew University of Jerusalem {ofirpele,werman}@cs.huji.ac.il Abstract.
arxiv: v2 [cs.cv] 31 Mar 2015
![arxiv: v2 [cs.cv] 31 Mar 2015](/thumbs/81/83268630.jpg "arxiv: v2 [cs.cv] 31 Mar 2015") Visual Saliency Based on Multiscale Deep Features Guanbin Li Yizhou Yu Department of Computer Science, The University of Hong Kong https://sites.google.com/site/ligb86/mdfsaliency/ arxiv:1503.08663v2 [cs.cv]
Visual Saliency Based on Multiscale Deep Features Guanbin Li Yizhou Yu Department of Computer Science, The University of Hong Kong https://sites.google.com/site/ligb86/mdfsaliency/ arxiv:1503.08663v2 [cs.cv]
Fast Fuzzy Clustering of Infrared Images. 2. brfcm
 Fast Fuzzy Clustering of Infrared Images Steven Eschrich, Jingwei Ke, Lawrence O. Hall and Dmitry B. Goldgof Department of Computer Science and Engineering, ENB 118 University of South Florida 4202 E.
Fast Fuzzy Clustering of Infrared Images Steven Eschrich, Jingwei Ke, Lawrence O. Hall and Dmitry B. Goldgof Department of Computer Science and Engineering, ENB 118 University of South Florida 4202 E.
SYDE Winter 2011 Introduction to Pattern Recognition. Clustering
 SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
SYDE 372 - Winter 2011 Introduction to Pattern Recognition Clustering Alexander Wong Department of Systems Design Engineering University of Waterloo Outline 1 2 3 4 5 All the approaches we have learned
Texture Segmentation by Windowed Projection
 Texture Segmentation by Windowed Projection 1, 2 Fan-Chen Tseng, 2 Ching-Chi Hsu, 2 Chiou-Shann Fuh 1 Department of Electronic Engineering National I-Lan Institute of Technology e-mail : fctseng@ccmail.ilantech.edu.tw
Texture Segmentation by Windowed Projection 1, 2 Fan-Chen Tseng, 2 Ching-Chi Hsu, 2 Chiou-Shann Fuh 1 Department of Electronic Engineering National I-Lan Institute of Technology e-mail : fctseng@ccmail.ilantech.edu.tw
Evaluation of regions-of-interest based attention algorithms using a probabilistic measure
 Evaluation of regions-of-interest based attention algorithms using a probabilistic measure Martin Clauss, Pierre Bayerl and Heiko Neumann University of Ulm, Dept. of Neural Information Processing, 89081
Evaluation of regions-of-interest based attention algorithms using a probabilistic measure Martin Clauss, Pierre Bayerl and Heiko Neumann University of Ulm, Dept. of Neural Information Processing, 89081
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015)
") International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) Brief Analysis on Typical Image Saliency Detection Methods Wenwen Pan, Xiaofei Sun, Xia Wang, Wei Zhang
International Conference on Information Sciences, Machinery, Materials and Energy (ICISMME 2015) Brief Analysis on Typical Image Saliency Detection Methods Wenwen Pan, Xiaofei Sun, Xia Wang, Wei Zhang
Color Image Segmentation
 Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Color Image Segmentation Yining Deng, B. S. Manjunath and Hyundoo Shin* Department of Electrical and Computer Engineering University of California, Santa Barbara, CA 93106-9560 *Samsung Electronics Inc.
Detection of Salient Region by Local Spatial Support & High Dimensional Color Transform
 2017 IJSRST Volume 3 Issue 8 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Detection of Salient Region by Local Spatial Support & High Dimensional Color Transform
2017 IJSRST Volume 3 Issue 8 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Detection of Salient Region by Local Spatial Support & High Dimensional Color Transform
Optimal Grouping of Line Segments into Convex Sets 1
 Optimal Grouping of Line Segments into Convex Sets 1 B. Parvin and S. Viswanathan Imaging and Distributed Computing Group Information and Computing Sciences Division Lawrence Berkeley National Laboratory,
Optimal Grouping of Line Segments into Convex Sets 1 B. Parvin and S. Viswanathan Imaging and Distributed Computing Group Information and Computing Sciences Division Lawrence Berkeley National Laboratory,
Hierarchical Saliency Detection
 Hierarchical Saliency Detection Qiong Yan Li Xu Jianping Shi Jiaya Jia The Chinese University of Hong Kong {qyan,xuli,jpshi,leojia}@cse.cuhk.edu.hk http://www.cse.cuhk.edu.hk/leojia/projects/hsaliency/
Hierarchical Saliency Detection Qiong Yan Li Xu Jianping Shi Jiaya Jia The Chinese University of Hong Kong {qyan,xuli,jpshi,leojia}@cse.cuhk.edu.hk http://www.cse.cuhk.edu.hk/leojia/projects/hsaliency/
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement