Study of the Perception of 3D Spatial Relations for a Volumetric. Display a
|
|
|
- Dorthy Merritt
- 6 years ago
- Views:
Transcription
1 Study of the Perception of 3D Spatial Relations for a Volumetric Display a Christoph Hoffmann 1, Zygmunt Pizlo 2, Voicu Popescu 1, and Paul Rosen 1 1 Computer Sciences, 2 Psychology Purdue University, 250 N University Street, West Lafayette, IN ABSTRACT We test perception of 3D spatial relations in 3D images rendered by a 3D display and compare it to that of a high-resolution flat panel display. Our 3D display is a device that renders a 3D image by displaying, in rapid succession, radial slices through the scene on a rotating screen. The image is contained in a glass globe and can be viewed from virtually any direction. We conducted a psychophysical experiment where objects with varying complexity were used as stimuli. On each trial an object or a distorted version is shown at an arbitrary orientation. The subject s task is to decide whether the object is distorted or not, under several viewing conditions (monocular/binocular, with/without motion parallax, and near/far). The subject s performance is measured by the detectability d, a conventional dependent variable in signal detection experiments. Highest d values were measured for the 3D display when the subject is allowed to walk around the display. a Work supported in part by NSF grants DMS , DCNS , DHER , DSC , DCMS , EEC , EIA , and ACI Hoffmann is also supported in part by an IBM Faculty Award. 1
2 1. INTRODUCTION Traditionally, computer graphics systems compute a 2D image by projecting a 3D scene from the view desired by the user onto an image plane. Here and throughout the paper we use the term scene to designate the data visualized by the graphics application. Depending on the application, the scene can be geometric or abstract, it can be a replica of an actual real-world scene or a fictive, future, or past environment, it can be at nano or macro scale, and it can be a single object or a complex ensemble that surrounds the user. The 2D image so computed is then shown on a 2D display. This approach has three fundamental problems, for which there is no perfect solution yet. First, the system has to give the user exploring the scene an intuitive way of specifying novel desired views. Keyboards, joysticks, and trackers designed to tell the graphics system the user s position and view direction are often non-intuitive, imprecise, and/or bulky and consequently do not allow the user to navigate freely in the 3D scene. All these interfaces scale very poorly with the number of users. Second, the 2D image has to be recomputed for each novel view. Computer graphics algorithms and their hardware implementation have progressed spectacularly. Radiosity, photon mapping, ray tracing and imagebased rendering techniques reuse precomputed or pre-acquired global illumination solutions to produce compelling visual experiences at interactive rates. However, when the surface appearance depends decisively on the view point as in the case of, for example, refractive or reflective surfaces, when the scene objects are dynamic, or when the lighting conditions change, interactively computed imagery falls short of realism. In such conditions rendering images that are mistaken for photographs still require more time than available in an interactive rendering system. Third, the user should be allowed to take advantage of binocular stereo vision. Existing head-mounted displays are bulky, have low resolution and limited field of view. Active stereo glasses and polarized passive glasses are uncomfortable, and produce little and sometimes incorrect disparity. 2
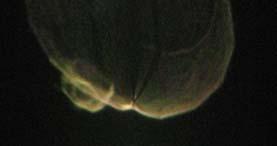
3 One way of avoiding these problems is to display a sculpture of light that is the exact replica of the 3D scene to be rendered. With such a 3D image, the user requests novel views naturally by gaze, by head movement, and by walking. For static scenes at least, once the 3D image is computed, no per-view rendering is required. Lastly, the user will perceive correctly different images with each of his eyes. Such a 3D display technology does not yet exist, but several technologies have demonstrated promising results. In this paper we analyze the perception of 3D spatial relations in images generated by a rotating-screen 3D display. We briefly review the main 3D display technologies in the next section. Then we describe the psychophysical experiment we conducted. Section 4 discusses the results of the experiment and Section 5 gives possible directions of future work. 2. THREE DIMENSIONAL DISPLAYS The Perspecta from Actuality Systems (Perspecta 2003) is a 3D display device that allows a volumetric image to be viewed by several observers simultaneously from any direction. A globular glass housing (Figure 1), with a 60 diameter, contains a rotating, semi-transparent screen of approximately 10 diameter on which 198 images are displayed by an internal DLP projector for each rotation of the screen. The screen rotates at 24Hz. Each image has a resolution of 768 by 768 pixels and represents a slice of the 3D scene to be displayed. The eye of the observer combines these slices and perceives a complete volumetric image. The globe is freestanding, so the image is visible from all directions except from underneath (a 360 o x 270 o field of view). The volumetric image comprises approximately 100 million voxels, each with 64 possible colors. Thus the technology puts great demands on the bandwidth between the host computer and the display, which limits the ability of displaying moving scenes. There are several alternatives to this technology for stereoscopic images. By far the most common stereoscopic device is based on presenting two separate images to each eye that account for parallax. In active systems, the images are presented alternatingly and a shuttered eye-glass device blocks one of the eyes 3
4 accordingly. In passive systems the two images are color coded or presented with polarized light, and spectacles with suitable filers ensure that each image reaches the intended eye. Another passive technology is based on lenticular gratings [3]. When the observer is positioned at the correct distance from the device, each eye sees a separate image on an LCD screen. The lenticular grating separates alternating image columns, so separating an interleaved stereoscopic pair of images. Such stereoscopic image pairs are a simpler technology to drive since the necessary data transmission rates are equivalent to normal 2D images. An emerging technology is based on holography. At this time, there are no commercially available devices that create moving holographic imagery. There are, however, devices for creating holographic still images. As with the Perspecta, holographic moving images demand bandwidth and computational power that appears to exceed current technology. Given the unique technological niche the Perspecta is situated in, we investigate the question whether the 3D images so generated confer a particular cognitive advantage when judging spatial relationships. If we consider images of familiar objects, such as houses, cars, and furniture, can an observer tell easily whether the object is correctly displayed or is distorted? To investigate this question, we conducted a series of experiments on the device. Briefly, in one experiment the object is displayed and the observer is encouraged to view it from several directions of his or her choosing before deciding whether the object is distorted. In another experiment, we fix the observer and investigate whether a binocular view is superior to a monocular view, and at what distance. Finally, we run the experiment also using a nonstereoscopic LCD display (the IBM T221 monitor with a pixel resolution of 3840 by 2400 on a 12 by 19 screen (IBM T )). The last experiment is meant to provide a comparison to today s omnipresent display technology. The limitations of the Perspecta described above prevent us from comparing the two technologies at a fundamental level. While the LCD technology is quite mature, the Perspecta technology is still in its infancy stage, equivalent to the pre-vga stage of 2D displays. The color depth, brightness, and resolution of the Perspecta technology are likely to improve. However, an inherent limitation of the technology is that it can only display 4
5 light, and not hide it. Since opacity cannot be generated, no part of the image can truly occlude any other part. Perspecta s inability to display only the first surface further complicates the comparison to LCD displays. We considered the option of using opacity data sets for the experiments: these are naturally shown on the Perspecta, and they can be converted to 2D images to be shown on the LCD. We dismissed this option for two reasons. First, producing an equivalent volume visualization on the LCD is difficult. One approach is to use a state of the art volume rendering algorithm. Another approach is to computer simulate the Perspecta display using a conventional 3D computer graphics API such as OpenGL [8]. A third approach is to photograph the Perspecta and display the photographs on the LCD. The particulars of these approaches would interfere with the comparison. The second reason for not using volume visualizations in the experiments is the need of presenting simple and/or familiar shapes to the subject. This enables formulating a clear, unambiguous task, regardless of the subject s training in the application domain that provided the stimuli. We opted for using objects represented by their surfaces, and for showing the images on the LCD at their best, as described in the next section. As 3D display technology evolves, future experiments will zero in on the fundamental differences between 3D and 2D displays, free of the noise characteristic to the early stages of an emerging technology. 3. PSYCHOPHSYSICAL EXPERIMENT In order to evaluate capabilities and limitations of Perspecta, we designed an experiment on the visual perception of spatial relations in a 3D scene. Perception of spatial relations in 3D scenes refers to a wide range of visual abilities: perception of distances among objects, distance from the observer, motion in depth, size and shape of an object. We decided to test the subject s ability to perceive 3D shapes, because shapes, as 5
6 opposed to 3D distances or sizes of objects can be recognized and discriminated reliably by human observers (see [13] and [12] ). In order to minimize the role of mental processes that are not directly related to visual perception, we designed an experiment in which the subject was presented with one stimulus on each trial and was asked to make a judgment about the shape of this stimulus. Other shape perception tasks like shape discrimination would require the subject to compare two or more shapes. Such comparison is likely to involve memory: the subject has to first look at one object, construct a mental representation of this object, and then compare this representation with the percept of the other object. Results of such a task are therefore likely to conflate the role of memory with the role of visual perception Subjects The initial subjects in this experiment were the four authors. ZP is experienced as a subject in psychophysical experiments on shape, including binocular experiments. The other three subjects did not have experience in psychophysical experiments, except for a couple of preliminary sessions of this experiment. PR received more experience with the stimuli due to the fact that he was directly involved in designing the stimuli. Using a small number of subjects and including the authors among the subjects in psychophysical experiments is commonly accepted in the psychophysics community (the reader may verify this claim by consulting leading perception journals like Vision Research and Perception & Psychophysics). First, it is well established that all fundamental mechanisms underlying visual perception, including shape, are innate ([7], [14] ). As a result, the magnitude of individual differences is extremely small. In other words, we all see things the same way, regardless of where we were born and raised. This means that results from just a few subjects who have normal vision is representative for the entire human population. Second, testing a subject who knows the hypotheses behind the experiment, not to mention, testing the person who formulated the hypotheses and designed the experiment in the first place, leads to valid data as long as a reliable psychophysical method is used. The main problem in studying perception is related to the 6
7 fact that the subject s response is a result of two factors: the percept itself, and a decision, which mediates between the percept and the behavioral response. There are psychophysical methods, which allow measuring independently the percept and the decision. This method is called Signal Detection Experiment (SDE) (Green & Swets, 1966). The main elements of SDE are described in the next subsection. To verify that the data collected using the authors as subjects is reliable, we reran the experiment with two subjects naïve to the task. The additional subjects were students from our computer graphics laboratory. They did not know the hypothesis being tested, and they participated in psychophysical experiments for the first time. Their performance was comparable to that of the initial 4 subjects, as shown in Section Signal Detection Experiment In a signal detection experiment two types of stimuli are used: S 1, called noise and S 2, called signal (where S 2 >S 1 ). The subject produces one of two responses, R 1 and R 2, respectively. Each of the two stimuli is presented 50% of the time in a random order: the subject does not know which of the two stimuli is presented on a given trial. Response R 1 is the correct response when S 1 is presented, and response R 2 is the correct response when S 2 is presented. The percept of a stimulus is represented by a random variable X. When S 1 is presented, X is subject to a normal distribution with the probability density function N( 1, 2 ), and when S 2 is presented, X is subject to a normal distribution with the probability density function N( 2, 2 ) ( 2 > 1 ). The subject s ability to detect the signal is related to ( 2-1 )/. This ratio is called detectability and is denoted by d. For a given, when the difference ( 2-1 ) is greater, it is easier to tell the two stimuli apart. Similarly, for a given difference ( 2-1 ), when is smaller, it is easier to tell the two stimuli apart. It is important to note that d is a measure of the percept unconfounded with the subject s bias towards either of the two responses R 1 or R 2. This is obvious because d is a function of the parameters that characterizes the perceptual representation of the stimuli ( 1, 2, ), but not the actual responses. 7
8 Now the main challenge is to show how to estimate d from the responses R 1 and R 2. Let h=p(r 2 S 2 ) be the hit rate and f=p(r 2 S 1 ) be the false alarm rate. It is assumed that the subject produces responses R 1 and R 2 based on a subjectively (and arbitrarily) adopted criterion k for the magnitude of the percept X. The decision criterion is as follows: if X>k, respond R 2, otherwise, respond R 1. Let (z) be the cumulative function of the standard normal distribution, and (z) its density function. Let z p = -1 (p), be the inverse of the cumulative distribution function. It is easy to show that (Green & Sweats, 1966): d = z h z f (1) In practice, one does not know h and f, but only their estimates. So, z h and z f must be computed from estimated h and f. To keep the notation simple, we will use symbols h, f, and d to represent not only the parameters, but also their estimators. This should not produce confusion. Hit rate and false alarm rate are then computed as follows. Let N 1 be the number of trials in which S 1 was presented and N 2 the number of trials in which S 2 was presented. Let N h be the number of trials where S 2 was presented and the subject responded R 2 (hits). Similarly, let N f be the number of trials where S 1 was presented and the subject responded R 2 (false alarms) Then: h = N h /N 2, f = N f /N 1 (2) Now d is estimated from (1) using hit and false alarm rates as estimated from (2). Interestingly, even though the actual hit and false alarm rates strongly depend on response criterion k, and d is computed from hit and false alarm rates, d itself does not depend on the response criterion k [8]. Finally, it must be pointed out that the formula (1) provides a good estimator of detectability only if the response criterion k is stable throughout the session. Otherwise, the estimated d will be an underestimation of the true d. So, even though, theoretically, d is a measure of the percept that is unconfounded by a response bias, in practice this may not be true if the response criterion k is not stable. The best way to assure 8
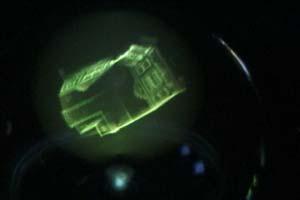
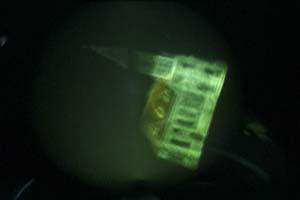
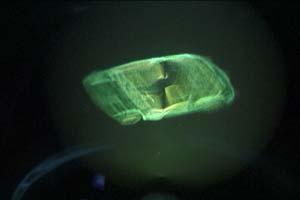
9 that the response criterion is stable is to use experienced subjects who are familiar with the stimuli and the experimental setup Stimuli For each trial the subject is shown an image rendered from one of 18 objects of varying complexity, from buildings and automobiles, to simple pieces of furniture (Figure 2). For about half of the images the objects are distorted, while for the other half they are not. The procedure to generate the images is shown in Figure 3. The original object (a) is stretched by different random amounts along each of its three major axes (b). This step ensures that although the same object is used for several tests, the object has a unique normal undistorted appearance for each of the tests. If an object is to be distorted, it is rotated about an arbitrary axis (c), stretched 40% (d), and then rotated back (e). Then, regardless of whether it has been distorted or not, the object is rotated about an arbitrary axis to generate a new random viewing angle (f). The images are generated on the Perspecta using our custom application that uses the manufacturer s implementation of OpenGL [8], a commonly used 3D computer graphics API. The application specifies the geometric data of the scene and the scene subvolume that should be mapped to the volume of the 3D display. The OpenGL driver then computes the 3D image by slicing (intersecting) the scene with the plane of the revolving disk, and transfers the slice images to the display. More details on the spatial 3D image generation can be found in the three whitepapers on Actuality s website. All lights in the laboratory were turned off except for a 75W incandescent spot light that was pointed away from the display. The light source provided sufficient ambient light to allow the subject to move safely around the display. Figure 4 shows photographs of the stimuli as seen on the Perspecta. The display was photographed in the actual lighting conditions used during the experiments. The exposure was set to allow for a full revolution of the display s revolving screen. Figure 5 gives left-right-left 3-panel stereograms showing various stimuli used, built by photographing the display from two locations separated by a 60mm translation. Fusing these images is difficult. The images differ by more than the camera position because of 9
10 the dynamic aspect of the display (rotating screen). Figure 6 shows several stimuli, each from three different views. In our case, this seems to be the best way to convey the 3D images on paper, although the actual images on the Perspecta looked substantially better Procedure Five experimental conditions were used, one session per condition (see Table 1). In four conditions, the stimuli so generated were shown on the Perspecta (Figure 1). In the fifth condition, the stimuli were shown on a LCD screen (Figure 7). In the case of Perspecta, the stimuli were viewed binocularly from the viewing distances of 1m, and 2m. The near distance was chosen to ensure that stereo disparity, given the size of the globe and the human interpupilary distance, was effective. The far distance was chosen to minimize the stereo disparity while still providing a view of the display with sufficiently high resolution. For the same reasons, these distances also define the range of typical viewing distances when the display is in use. In the monocular sessions, the subject was at 1m from the display. Monocular viewing is achieved using an eye patch. In these three conditions, the head was supported by a chin-forehead rest. In the fourth condition, the subject was instructed to walk around Perspecta while making judgments. The subjects were not restricted in anyway, but most subjects chose to revolve around Perspecta on a circle of a 1m radius. In the case of the LCD, the viewing was binocular from a distance of about 1m, which was the simulated distance used in computing perspective images. In this case, however, binocular disparity was absent. Therefore, this condition is called monoscopic, as opposed to stereoscopic. Each session started with 20 practice trials. Then, 200 experimental trials followed. On each trial, an object was shown and the subject s task was to judge whether the object was symmetric. Exposure duration was 15 sec. The subject had the option to respond at anytime during the 15 sec period, or after that. Each subject received the same set of images, but the order in which the images were displayed was randomized with each subject and with each session. The subjects typically responded while the image was on the screen. A session of 220 trials took between 25 and 45 minutes to complete. The authors received additional practice 10
11 by running practice sessions with 200 trials. This was done in order to verify as to whether substantial learning effects are present. No such effects were found. The subject was provided with a display of the current test number, the currently selected answer, and whether the previous answer was correct or not. The verdict on the previous answer was given to help the subject maintain focus. The feedback was given on a nearby LCD (Figure 1) that had a black background so as not to interfere with the experiment. 4. RESULTS Estimated d are shown in Table 2. Recall that a chance performance is represented by d =0 and perfect performance by d =. The first two rows show results of the two naïve subjects. Average d values are shown in Figure 8. The error bars in Figure 8 represent one standard deviation of the mean. Performance in the case of walking around Perspecta was substantially higher than that in the remaining four conditions (see Figure 8). Binocular viewing of Perspecta from a distance of 1m led to higher performance than that from a distance of 2m, and this, in turn was higher than monocular viewing of Perspecta from a distance of 1m. These results are not unexpected. Next, binocular performance with Perspecta is similar to that in monoscopic viewing of an LCD. This result is probably related to the fact that the images rendered on Perspecta have rather low contrast. Interestingly, differences in performance across binocular viewing of Perspecta from distances 1 and 2m, and monocular viewing of Perspecta are not very large. Implications of this result will be discussed in the next section. To evaluate statistical significance of the results, we performed a one-way repeated measures analysis of variance. The main effect of the viewing condition was significant (p<0.001). Post hoc tests showed that free viewing of Perspecta led to better performance than any of the other four viewing conditions (p<0.001). The only other significant effect was found between binocular viewing of Perspecta from 1m viewing 11
12 distance and monocular viewing of Perspecta (p<0.05). All other differences were statistically not significant (p>0.05). 5. DISCUSSION The main result of our experiment is that free viewing of stimuli shown in Perspecta leads to a very reliable performance and this performance is much higher than performance in monoscopic viewing of an LCD display. The fact that viewing Perspecta from one viewing direction either monocularly or binocularly does not lead to better performance than monoscopic viewing of stimuli on an LCD display should be attributed to the presence of a number of effective monocular cues that are available on LCD displays. Monocular cues are likely to be more effective with an LCD display as compared to Perspecta because of higher contrast, the presence of texture and color and clear edges, as well as self occlusions. The fact that a single perspective image of an object can lead to a reliable 3D percept is not new and is not restricted to symmetry judgments (e.g. [5] ). It is known that shapes of structured objects allow the human visual system to use strong priors, which lead to 3D percept from a single 2D image ([10] and [11] ). To further characterize the effectiveness of 3D images, it would be interesting to use other types of stimuli (e.g. motion) and other types of judgments (speed or 3D distances). 6. FUTURE WORK Our Perspecta display is a second generation device. Cost trade-offs in the manufacture of the device have resulted in an image that is slightly wobbly. We estimate that the amplitude of the wobbling is approximately 5mm. A more costly, high-precision mechanical fabrication would lead to a more stable image. Furthermore, the current pixel resolution is expected to increase in future generations of the device. Both factors suggest that the full potential of the device has not yet been realized. Moreover, the bandwidth of the connection between computer and device undoubtedly will improve in the future. Today, moving complex images 12
13 cannot be so displayed. When this has changed, new experiments should be conducted to assess the effect of these improvements. We are pursuing an alternative path to improving the stability of the 3D image by modeling the wobbling pattern. We speculate that the pattern does not change considerably over time and that it can be almost eliminated by better calibration. The model parameters will be tuned manually by displaying a calibration scene and searching for a combination that minimizes the wobbling. We plan to also investigate the possibility of using a camera to provide the feedback needed for calibration and completely automate the procedure. There are image applications that are traditionally difficult to do on conventional displays. They include point clouds and point/line arrangements in 3D-space. Such images are easy to display and comprehend on the Perspecta, and are difficult to render well on conventional displays. A familiar strategy on conventional displays is to add as depth cue a reduced size and/or a fainter intensity of more distant parts of the arrangement. It would be interesting to compare the effectiveness of these display strategies with a straightforward rendering on the Perspecta. A fundamental limitation of the 3D display technology employed by the Perspecta is its inability to display view dependent effects such as occlusions and reflections. For example a bright back surface cannot be hidden by a dark front surface, or a specular highlight s position is ambiguous when more than one view is considered. We will investigate how to reduce the artifacts resulting from these fundamental limitations. An a priori knowledge of the set of desired view locations could be employed to first eliminate the surfaces that are not visible from any or most of the desired views. Work in image-based rendering has shown that stationary specular highlights are preferable to eliminating all the highlights and treating all surfaces as diffuse. It is our experience that users generally do not notice that the specular highlights do not change with the desired view, formal user studies are in order to establish which applications could tolerate this approximation. When the correct highlight is important, tracking the 13
14 user appears to be the only solution. For multiple users, each will have his own highlight but they will also see the highlight rendered for the other users, which will probably give the impression of a moving light. 3D displays are a promising technology; however, the technology is still at its infancy. Level-of-detail and occlusion culling algorithms, schemes for parallel and distributed rendering, antialiasing algorithms (another view dependent effect), interfaces (for pointing, selecting, navigation, etc.) are yet to be developed and constitute interesting and potentially very fruitful avenues for future research. 7. ACKNOWLEDGEMENTS We would like to thank all the members of our computer graphics and visualization laboratory that put up with the dim lighting conditions required to run the numerous experiments. This research has been supported in part by NSF grants DMS , DCNS , DHER , DSC , DCMS , EEC , EIA , and ACI Hoffmann is also supported in part by an IBM Faculty Award. 14
15 REFERENCES [1] Perspecta 2003, Acutality Systems Inc., URL: [2] Perspecta whitepapers. [3] DTI 2D/3D 2003, Dimension Technologies Inc. URL: [4] IBM T , IBM Corporation, URL: [5] Chan M.W., Pizlo Z. & Chelberg D. (1999) Binocular shape reconstruction: psychological plausibility of the 8 point algorithm. Computer Vision & Vision Understanding, 74, [6] Green D.M. & Swets J.W. (1966) Signal Detection Theory and Psychophysics. NY: Wiley. [7] Hochberg J. & Brooks V. (1962) Pictorial recognition as an unlearned ability: a study of one childe s performance. American Journal of Psychology, 75, [8] Macmillan N.A. & Creelman C.D. (1991) Detection Theory: A User s Guide. Cambridge University Press. [9] OpenGL URL: [10] Pizlo Z. Li Y. & Francis G. (2005) A new look at binocular stereopsis. Vision Research, 45, [11] Pizlo Z. (2001) Perception viewed as an inverse problem. Vision Research, 41, [12] Pizlo Z. & Stevenson A. (1999) Shape constancy from novel views. Perception & Psychophysics, 61, [13] Pizlo Z. (1994) A theory of shape constancy based on perspective invariants. Vision Research, 34,
16 [14] Slater A. (1998) Visual organization and perceptual constancies in early infancy. In: Walsh V. & Kulikowski J. (Eds.), Perceptual Constancy, Cambridge University Press (pp. 6-30). [15] Wickens T.D. (2002) Elementary Signal Detection Theory. Oxford University Press. 16
17 Figure 1 Experiment setup. The lab lights were dimmed during actual experiment. 17

18 Figure 2. Objects used to generate stimuli 18
19 a b c d e f Figure 3. Distorted trial image generation 19






20 Figure 4. Examples of 3D images generated by the Perspecta display. 20


21 Left Right Left 21



22 22
23 Figure 5. Left-right-left 3-panel stereograms exemplifying the stimuli used. 23







24 24








25 Figure 6. Photographs of various stimuli from 3 different views. 25




26 Figure 7. LCD experiment setup 26
27 Figure 8. Detectability averaged across subjects for each of the 5 experimental conditions. 27
28 Condition Display Monocular/Bino cular Viewing distance Viewpoint Label 1 3D Binocular 1m fixed bin1 2 3D Monocular 1m fixed mon1 Experiment # 3 3D Binocular 2m fixed bin2 4 3D Binocular Variable, walk around freely free free 5 LCD Binocular 1m free lcd Table 1 Viewing conditions used for each of the 5 experiments 28
29 Experiment free bin1 bin2 mon1 lcd SP JD Subject VP PR CH ZP Table 2 Detectability d measured for the 6 subjects for each of the 5 experimental conditions used. 29
Perception of Surfaces from Line Drawings
 Perception of Surfaces from Line Drawings CHRISTOPH HOFFMANN 1, ZYGMUNT PIZLO 2, VOICU POPESCU 1, STEVE PRICE 1 1 Computer Sciences, 2 Psychological Sciences, Purdue University We test the perception of
Perception of Surfaces from Line Drawings CHRISTOPH HOFFMANN 1, ZYGMUNT PIZLO 2, VOICU POPESCU 1, STEVE PRICE 1 1 Computer Sciences, 2 Psychological Sciences, Purdue University We test the perception of
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Shape constancy from novel views
 Perception & Psychophysics 1999, 61 (7), 1299-1307 Shape constancy from novel views ZYGMUNT PIZLO and ADAM K. STEVENSON Purdue University, West Lafayette, Indiana Prior experiments on shape constancy from
Perception & Psychophysics 1999, 61 (7), 1299-1307 Shape constancy from novel views ZYGMUNT PIZLO and ADAM K. STEVENSON Purdue University, West Lafayette, Indiana Prior experiments on shape constancy from
Binocular cues to depth PSY 310 Greg Francis. Lecture 21. Depth perception
 Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
BINOCULAR DISPARITY AND DEPTH CUE OF LUMINANCE CONTRAST. NAN-CHING TAI National Taipei University of Technology, Taipei, Taiwan
 N. Gu, S. Watanabe, H. Erhan, M. Hank Haeusler, W. Huang, R. Sosa (eds.), Rethinking Comprehensive Design: Speculative Counterculture, Proceedings of the 19th International Conference on Computer- Aided
N. Gu, S. Watanabe, H. Erhan, M. Hank Haeusler, W. Huang, R. Sosa (eds.), Rethinking Comprehensive Design: Speculative Counterculture, Proceedings of the 19th International Conference on Computer- Aided
Prof. Feng Liu. Spring /27/2014
 Prof. Feng Liu Spring 2014 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/27/2014 Last Time Video Stabilization 2 Today Stereoscopic 3D Human depth perception 3D displays 3 Stereoscopic media Digital Visual
Prof. Feng Liu Spring 2014 http://www.cs.pdx.edu/~fliu/courses/cs510/ 05/27/2014 Last Time Video Stabilization 2 Today Stereoscopic 3D Human depth perception 3D displays 3 Stereoscopic media Digital Visual
Using surface markings to enhance accuracy and stability of object perception in graphic displays
 Using surface markings to enhance accuracy and stability of object perception in graphic displays Roger A. Browse a,b, James C. Rodger a, and Robert A. Adderley a a Department of Computing and Information
Using surface markings to enhance accuracy and stability of object perception in graphic displays Roger A. Browse a,b, James C. Rodger a, and Robert A. Adderley a a Department of Computing and Information
Detecting mirror-symmetry of a volumetric shape from its single 2D image
 Detecting mirror-symmetry of a volumetric shape from its single D image Tadamasa Sawada Zygmunt Pizlo Department of Psychological Sciences, Purdue University, West Lafayette, IN, USA tsawada@psych.purdue.edu
Detecting mirror-symmetry of a volumetric shape from its single D image Tadamasa Sawada Zygmunt Pizlo Department of Psychological Sciences, Purdue University, West Lafayette, IN, USA tsawada@psych.purdue.edu
Basic distinctions. Definitions. Epstein (1965) familiar size experiment. Distance, depth, and 3D shape cues. Distance, depth, and 3D shape cues
 familiar size experiment. Distance, depth, and 3D shape cues. Distance, depth, and 3D shape cues") Distance, depth, and 3D shape cues Pictorial depth cues: familiar size, relative size, brightness, occlusion, shading and shadows, aerial/ atmospheric perspective, linear perspective, height within image,
Distance, depth, and 3D shape cues Pictorial depth cues: familiar size, relative size, brightness, occlusion, shading and shadows, aerial/ atmospheric perspective, linear perspective, height within image,
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Mahdi Amiri. May Sharif University of Technology
 Course Presentation Multimedia Systems 3D Technologies Mahdi Amiri May 2014 Sharif University of Technology Binocular Vision (Two Eyes) Advantages A spare eye in case one is damaged. A wider field of view
Course Presentation Multimedia Systems 3D Technologies Mahdi Amiri May 2014 Sharif University of Technology Binocular Vision (Two Eyes) Advantages A spare eye in case one is damaged. A wider field of view
lecture 10 - depth from blur, binocular stereo
 This lecture carries forward some of the topics from early in the course, namely defocus blur and binocular disparity. The main emphasis here will be on the information these cues carry about depth, rather
This lecture carries forward some of the topics from early in the course, namely defocus blur and binocular disparity. The main emphasis here will be on the information these cues carry about depth, rather
Limitations of Projection Radiography. Stereoscopic Breast Imaging. Limitations of Projection Radiography. 3-D Breast Imaging Methods
 Stereoscopic Breast Imaging Andrew D. A. Maidment, Ph.D. Chief, Physics Section Department of Radiology University of Pennsylvania Limitations of Projection Radiography Mammography is a projection imaging
Stereoscopic Breast Imaging Andrew D. A. Maidment, Ph.D. Chief, Physics Section Department of Radiology University of Pennsylvania Limitations of Projection Radiography Mammography is a projection imaging
Robert Collins CSE486, Penn State Lecture 08: Introduction to Stereo
 Lecture 08: Introduction to Stereo Reading: T&V Section 7.1 Stereo Vision Inferring depth from images taken at the same time by two or more cameras. Basic Perspective Projection Scene Point Perspective
Lecture 08: Introduction to Stereo Reading: T&V Section 7.1 Stereo Vision Inferring depth from images taken at the same time by two or more cameras. Basic Perspective Projection Scene Point Perspective
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet
 Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet Zygmunt Pizlo Purdue University, U.S.A. Acknowledgments: Y. Li, T. Sawada, R.M. Steinman Support: NSF, US Department of Energy,
Shape Constancy and Shape Recovery: wherein Human and Computer Vision Meet Zygmunt Pizlo Purdue University, U.S.A. Acknowledgments: Y. Li, T. Sawada, R.M. Steinman Support: NSF, US Department of Energy,
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Greatly enhanced visual detail and vividity. Accuracy based on mathematical derivation Disparity can function in isolation (RDS)
") Rob Black Greatly enhanced visual detail and vividity. Accuracy based on mathematical derivation Disparity can function in isolation (RDS) But, in conventional and recent 3D glasses systems it s advantages
Rob Black Greatly enhanced visual detail and vividity. Accuracy based on mathematical derivation Disparity can function in isolation (RDS) But, in conventional and recent 3D glasses systems it s advantages
CS 563 Advanced Topics in Computer Graphics Stereoscopy. by Sam Song
 CS 563 Advanced Topics in Computer Graphics Stereoscopy by Sam Song Stereoscopy Introduction Parallax Camera Displaying and Viewing Results Stereoscopy What is it? seeing in three dimensions creates the
CS 563 Advanced Topics in Computer Graphics Stereoscopy by Sam Song Stereoscopy Introduction Parallax Camera Displaying and Viewing Results Stereoscopy What is it? seeing in three dimensions creates the
Realtime 3D Computer Graphics Virtual Reality
 Realtime 3D Computer Graphics Virtual Reality Human Visual Perception The human visual system 2 eyes Optic nerve: 1.5 million fibers per eye (each fiber is the axon from a neuron) 125 million rods (achromatic
Realtime 3D Computer Graphics Virtual Reality Human Visual Perception The human visual system 2 eyes Optic nerve: 1.5 million fibers per eye (each fiber is the axon from a neuron) 125 million rods (achromatic
Natural Viewing 3D Display
 We will introduce a new category of Collaboration Projects, which will highlight DoCoMo s joint research activities with universities and other companies. DoCoMo carries out R&D to build up mobile communication,
We will introduce a new category of Collaboration Projects, which will highlight DoCoMo s joint research activities with universities and other companies. DoCoMo carries out R&D to build up mobile communication,
Lecture 17: Recursive Ray Tracing. Where is the way where light dwelleth? Job 38:19
 Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
Perception Viewed as an Inverse Problem
 Perception Viewed as an Inverse Problem Fechnerian Causal Chain of Events - an evaluation Fechner s study of outer psychophysics assumes that the percept is a result of a causal chain of events: Distal
Perception Viewed as an Inverse Problem Fechnerian Causal Chain of Events - an evaluation Fechner s study of outer psychophysics assumes that the percept is a result of a causal chain of events: Distal
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Crosstalk reduces the amount of depth seen in 3D images of natural scenes
 Crosstalk reduces the amount of depth seen in 3D images of natural scenes Inna Tsirlin *, Robert S. Allison and Laurie M. Wilcox Centre for Vision Research, York University, 4700 Keele st., Toronto, ON,
Crosstalk reduces the amount of depth seen in 3D images of natural scenes Inna Tsirlin *, Robert S. Allison and Laurie M. Wilcox Centre for Vision Research, York University, 4700 Keele st., Toronto, ON,
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images
 Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Processing Framework Proposed by Marr. Image
 Processing Framework Proposed by Marr Recognition 3D structure; motion characteristics; surface properties Shape From stereo Motion flow Shape From motion Color estimation Shape From contour Shape From
Processing Framework Proposed by Marr Recognition 3D structure; motion characteristics; surface properties Shape From stereo Motion flow Shape From motion Color estimation Shape From contour Shape From
Model-Based Stereo. Chapter Motivation. The modeling system described in Chapter 5 allows the user to create a basic model of a
 96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
SAMPLING AND NOISE. Increasing the number of samples per pixel gives an anti-aliased image which better represents the actual scene.
 SAMPLING AND NOISE When generating an image, Mantra must determine a color value for each pixel by examining the scene behind the image plane. Mantra achieves this by sending out a number of rays from
SAMPLING AND NOISE When generating an image, Mantra must determine a color value for each pixel by examining the scene behind the image plane. Mantra achieves this by sending out a number of rays from
Devices displaying 3D image. RNDr. Róbert Bohdal, PhD.
 Devices displaying 3D image RNDr. Róbert Bohdal, PhD. 1 Types of devices displaying 3D image Stereoscopic Re-imaging Volumetric Autostereoscopic Holograms mounted displays, optical head-worn displays Pseudo
Devices displaying 3D image RNDr. Róbert Bohdal, PhD. 1 Types of devices displaying 3D image Stereoscopic Re-imaging Volumetric Autostereoscopic Holograms mounted displays, optical head-worn displays Pseudo
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
Face Cyclographs for Recognition
 Face Cyclographs for Recognition Guodong Guo Department of Computer Science North Carolina Central University E-mail: gdguo@nccu.edu Charles R. Dyer Computer Sciences Department University of Wisconsin-Madison
Face Cyclographs for Recognition Guodong Guo Department of Computer Science North Carolina Central University E-mail: gdguo@nccu.edu Charles R. Dyer Computer Sciences Department University of Wisconsin-Madison
Perception, Part 2 Gleitman et al. (2011), Chapter 5
, Chapter 5") Perception, Part 2 Gleitman et al. (2011), Chapter 5 Mike D Zmura Department of Cognitive Sciences, UCI Psych 9A / Psy Beh 11A February 27, 2014 T. M. D'Zmura 1 Visual Reconstruction of a Three-Dimensional
Perception, Part 2 Gleitman et al. (2011), Chapter 5 Mike D Zmura Department of Cognitive Sciences, UCI Psych 9A / Psy Beh 11A February 27, 2014 T. M. D'Zmura 1 Visual Reconstruction of a Three-Dimensional
Introduction to 3D Concepts
 PART I Introduction to 3D Concepts Chapter 1 Scene... 3 Chapter 2 Rendering: OpenGL (OGL) and Adobe Ray Tracer (ART)...19 1 CHAPTER 1 Scene s0010 1.1. The 3D Scene p0010 A typical 3D scene has several
PART I Introduction to 3D Concepts Chapter 1 Scene... 3 Chapter 2 Rendering: OpenGL (OGL) and Adobe Ray Tracer (ART)...19 1 CHAPTER 1 Scene s0010 1.1. The 3D Scene p0010 A typical 3D scene has several
Perceived 3D metric (or Euclidean) shape is merely ambiguous, not systematically distorted
 shape is merely ambiguous, not systematically distorted") Exp Brain Res (2013) 224:551 555 DOI 10.1007/s00221-012-3334-y RESEARCH ARTICLE Perceived 3D metric (or Euclidean) shape is merely ambiguous, not systematically distorted Young Lim Lee Mats Lind Geoffrey
Exp Brain Res (2013) 224:551 555 DOI 10.1007/s00221-012-3334-y RESEARCH ARTICLE Perceived 3D metric (or Euclidean) shape is merely ambiguous, not systematically distorted Young Lim Lee Mats Lind Geoffrey
COMP environment mapping Mar. 12, r = 2n(n v) v
 v") Rendering mirror surfaces The next texture mapping method assumes we have a mirror surface, or at least a reflectance function that contains a mirror component. Examples might be a car window or hood,
Rendering mirror surfaces The next texture mapping method assumes we have a mirror surface, or at least a reflectance function that contains a mirror component. Examples might be a car window or hood,
Multidimensional image retargeting
 Multidimensional image retargeting 9:00: Introduction 9:10: Dynamic range retargeting Tone mapping Apparent contrast and brightness enhancement 10:45: Break 11:00: Color retargeting 11:30: LDR to HDR 12:20:
Multidimensional image retargeting 9:00: Introduction 9:10: Dynamic range retargeting Tone mapping Apparent contrast and brightness enhancement 10:45: Break 11:00: Color retargeting 11:30: LDR to HDR 12:20:
Advanced Distant Light for DAZ Studio
 Contents Advanced Distant Light for DAZ Studio Introduction Important Concepts Quick Start Quick Tips Parameter Settings Light Group Shadow Group Lighting Control Group Known Issues Introduction The Advanced
Contents Advanced Distant Light for DAZ Studio Introduction Important Concepts Quick Start Quick Tips Parameter Settings Light Group Shadow Group Lighting Control Group Known Issues Introduction The Advanced
Photo Studio Optimizer
 CATIA V5 Training Foils Photo Studio Optimizer Version 5 Release 19 September 008 EDU_CAT_EN_PSO_FF_V5R19 Photo Studio Optimizer Objectives of the course Upon completion of this course you will be able
CATIA V5 Training Foils Photo Studio Optimizer Version 5 Release 19 September 008 EDU_CAT_EN_PSO_FF_V5R19 Photo Studio Optimizer Objectives of the course Upon completion of this course you will be able
Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision
 Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision Zhiyan Zhang 1, Wei Qian 1, Lei Pan 1 & Yanjun Li 1 1 University of Shanghai for Science and Technology, China
Adaptive Zoom Distance Measuring System of Camera Based on the Ranging of Binocular Vision Zhiyan Zhang 1, Wei Qian 1, Lei Pan 1 & Yanjun Li 1 1 University of Shanghai for Science and Technology, China
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Measurements using three-dimensional product imaging
 ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
ARCHIVES of FOUNDRY ENGINEERING Published quarterly as the organ of the Foundry Commission of the Polish Academy of Sciences ISSN (1897-3310) Volume 10 Special Issue 3/2010 41 46 7/3 Measurements using
The Absence of Depth Constancy in Contour Stereograms
 Framingham State University Digital Commons at Framingham State University Psychology Faculty Publications Psychology Department 2001 The Absence of Depth Constancy in Contour Stereograms Dawn L. Vreven
Framingham State University Digital Commons at Framingham State University Psychology Faculty Publications Psychology Department 2001 The Absence of Depth Constancy in Contour Stereograms Dawn L. Vreven
Differential Processing of Facial Motion
 Differential Processing of Facial Motion Tamara L. Watson 1, Alan Johnston 1, Harold C.H Hill 2 and Nikolaus Troje 3 1 Department of Psychology, University College London, Gower Street, London WC1E 6BT
Differential Processing of Facial Motion Tamara L. Watson 1, Alan Johnston 1, Harold C.H Hill 2 and Nikolaus Troje 3 1 Department of Psychology, University College London, Gower Street, London WC1E 6BT
OpenGL. Prior work vast 11/17/2009. Reflections a difficult problem. Problem of rendering reflections. Reflected-scene approximation
 Reflections a difficult problem Voicu Popescu, Chunhui Mei, Jordan Dauble, and Elisha Sacks Purdue University Every reflector is a portal onto a world which is as rich as the directly observed scene and
Reflections a difficult problem Voicu Popescu, Chunhui Mei, Jordan Dauble, and Elisha Sacks Purdue University Every reflector is a portal onto a world which is as rich as the directly observed scene and
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
MOTION STEREO DOUBLE MATCHING RESTRICTION IN 3D MOVEMENT ANALYSIS
 MOTION STEREO DOUBLE MATCHING RESTRICTION IN 3D MOVEMENT ANALYSIS ZHANG Chun-sen Dept of Survey, Xi an University of Science and Technology, No.58 Yantazhonglu, Xi an 710054,China -zhchunsen@yahoo.com.cn
MOTION STEREO DOUBLE MATCHING RESTRICTION IN 3D MOVEMENT ANALYSIS ZHANG Chun-sen Dept of Survey, Xi an University of Science and Technology, No.58 Yantazhonglu, Xi an 710054,China -zhchunsen@yahoo.com.cn
Deferred Rendering Due: Wednesday November 15 at 10pm
 CMSC 23700 Autumn 2017 Introduction to Computer Graphics Project 4 November 2, 2017 Deferred Rendering Due: Wednesday November 15 at 10pm 1 Summary This assignment uses the same application architecture
CMSC 23700 Autumn 2017 Introduction to Computer Graphics Project 4 November 2, 2017 Deferred Rendering Due: Wednesday November 15 at 10pm 1 Summary This assignment uses the same application architecture
The perception of surface orientation from multiple sources of optical information
 Perception & Psychophysics 1995, 57 (5), 629 636 The perception of surface orientation from multiple sources of optical information J. FARLEY NORMAN, JAMES T. TODD, and FLIP PHILLIPS Ohio State University,
Perception & Psychophysics 1995, 57 (5), 629 636 The perception of surface orientation from multiple sources of optical information J. FARLEY NORMAN, JAMES T. TODD, and FLIP PHILLIPS Ohio State University,
A Qualitative Analysis of 3D Display Technology
 A Qualitative Analysis of 3D Display Technology Nicholas Blackhawk, Shane Nelson, and Mary Scaramuzza Computer Science St. Olaf College 1500 St. Olaf Ave Northfield, MN 55057 scaramum@stolaf.edu Abstract
A Qualitative Analysis of 3D Display Technology Nicholas Blackhawk, Shane Nelson, and Mary Scaramuzza Computer Science St. Olaf College 1500 St. Olaf Ave Northfield, MN 55057 scaramum@stolaf.edu Abstract
Reflected-Scene Impostors for Realistic Reflections at Interactive Rates
 Voicu Popescu, Chunhui Mei, Jordan Dauble, and Elisha Sacks Purdue University Reflected-Scene Impostors for Realistic Reflections at Interactive Rates Reflections a difficult problem Every reflector is
Voicu Popescu, Chunhui Mei, Jordan Dauble, and Elisha Sacks Purdue University Reflected-Scene Impostors for Realistic Reflections at Interactive Rates Reflections a difficult problem Every reflector is
Stereoscopic matching and the aperture problem
 Perception, 2004, volume 33, pages 769 ^ 787 DOI:10.1068/p5263 Stereoscopic matching and the aperture problem Loes C J van Dam, Raymond van Eeô Helmholtz Institute, Utrecht University, Princetonplein 5,
Perception, 2004, volume 33, pages 769 ^ 787 DOI:10.1068/p5263 Stereoscopic matching and the aperture problem Loes C J van Dam, Raymond van Eeô Helmholtz Institute, Utrecht University, Princetonplein 5,
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
COMP 558 lecture 22 Dec. 1, 2010
 Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Binocular correspondence problem Last class we discussed how to remap the pixels of two images so that corresponding points are in the same row. This is done by computing the fundamental matrix, defining
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
PART A Three-Dimensional Measurement with iwitness
 PART A Three-Dimensional Measurement with iwitness A1. The Basic Process The iwitness software system enables a user to convert two-dimensional (2D) coordinate (x,y) information of feature points on an
PART A Three-Dimensional Measurement with iwitness A1. The Basic Process The iwitness software system enables a user to convert two-dimensional (2D) coordinate (x,y) information of feature points on an
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Introduction. Chapter Computer Graphics
 Chapter 1 Introduction 1.1. Computer Graphics Computer graphics has grown at an astounding rate over the last three decades. In the 1970s, frame-buffers capable of displaying digital images were rare and
Chapter 1 Introduction 1.1. Computer Graphics Computer graphics has grown at an astounding rate over the last three decades. In the 1970s, frame-buffers capable of displaying digital images were rare and
Omni-directional stereoscopy
 Omni-directional stereoscopy Paul Bourke (WASP, UWA) Motivation Correct stereoscopic views require a matching relationship between viewing geometry and rendering geometry. That is, viewer position/relationship
Omni-directional stereoscopy Paul Bourke (WASP, UWA) Motivation Correct stereoscopic views require a matching relationship between viewing geometry and rendering geometry. That is, viewer position/relationship
INTERACTIVE ENVIRONMENT FOR INTUITIVE UNDERSTANDING OF 4D DATA. M. Murata and S. Hashimoto Humanoid Robotics Institute, Waseda University, Japan
 1 INTRODUCTION INTERACTIVE ENVIRONMENT FOR INTUITIVE UNDERSTANDING OF 4D DATA M. Murata and S. Hashimoto Humanoid Robotics Institute, Waseda University, Japan Abstract: We present a new virtual reality
1 INTRODUCTION INTERACTIVE ENVIRONMENT FOR INTUITIVE UNDERSTANDING OF 4D DATA M. Murata and S. Hashimoto Humanoid Robotics Institute, Waseda University, Japan Abstract: We present a new virtual reality
Stereoscopic matching and the aperture problem
 Chapter 2 Stereoscopic matching and the aperture problem Abstract In order to perceive stereoscopic depth, the visual system must define binocular disparities. Consider an oblique line seen through an
Chapter 2 Stereoscopic matching and the aperture problem Abstract In order to perceive stereoscopic depth, the visual system must define binocular disparities. Consider an oblique line seen through an
Advanced Graphics. Path Tracing and Photon Mapping Part 2. Path Tracing and Photon Mapping
 Advanced Graphics Path Tracing and Photon Mapping Part 2 Path Tracing and Photon Mapping Importance Sampling Combine importance sampling techniques Reflectance function (diffuse + specular) Light source
Advanced Graphics Path Tracing and Photon Mapping Part 2 Path Tracing and Photon Mapping Importance Sampling Combine importance sampling techniques Reflectance function (diffuse + specular) Light source
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Think-Pair-Share. What visual or physiological cues help us to perceive 3D shape and depth?
 Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Important concepts in binocular depth vision: Corresponding and non-corresponding points. Depth Perception 1. Depth Perception Part II
 Depth Perception Part II Depth Perception 1 Binocular Cues to Depth Depth Information Oculomotor Visual Accomodation Convergence Binocular Monocular Static Cues Motion Parallax Perspective Size Interposition
Depth Perception Part II Depth Perception 1 Binocular Cues to Depth Depth Information Oculomotor Visual Accomodation Convergence Binocular Monocular Static Cues Motion Parallax Perspective Size Interposition
Graphics for VEs. Ruth Aylett
 Graphics for VEs Ruth Aylett Overview VE Software Graphics for VEs The graphics pipeline Projections Lighting Shading VR software Two main types of software used: off-line authoring or modelling packages
Graphics for VEs Ruth Aylett Overview VE Software Graphics for VEs The graphics pipeline Projections Lighting Shading VR software Two main types of software used: off-line authoring or modelling packages
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON. Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij
 COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij Intelligent Systems Lab Amsterdam, University of Amsterdam ABSTRACT Performance
COLOR FIDELITY OF CHROMATIC DISTRIBUTIONS BY TRIAD ILLUMINANT COMPARISON Marcel P. Lucassen, Theo Gevers, Arjan Gijsenij Intelligent Systems Lab Amsterdam, University of Amsterdam ABSTRACT Performance
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Virtual Reality ll. Visual Imaging in the Electronic Age. Donald P. Greenberg November 16, 2017 Lecture #22
 Virtual Reality ll Visual Imaging in the Electronic Age Donald P. Greenberg November 16, 2017 Lecture #22 Fundamentals of Human Perception Retina, Rods & Cones, Physiology Receptive Fields Field of View
Virtual Reality ll Visual Imaging in the Electronic Age Donald P. Greenberg November 16, 2017 Lecture #22 Fundamentals of Human Perception Retina, Rods & Cones, Physiology Receptive Fields Field of View
Representing 3D Objects: An Introduction to Object Centered and Viewer Centered Models
 Representing 3D Objects: An Introduction to Object Centered and Viewer Centered Models Guangyu Zhu CMSC828J Advanced Topics in Information Processing: Approaches to Representing and Recognizing Objects
Representing 3D Objects: An Introduction to Object Centered and Viewer Centered Models Guangyu Zhu CMSC828J Advanced Topics in Information Processing: Approaches to Representing and Recognizing Objects
Video Communication Ecosystems. Research Challenges for Immersive. over Future Internet. Converged Networks & Services (CONES) Research Group
 Research Group") Research Challenges for Immersive Video Communication Ecosystems over Future Internet Tasos Dagiuklas, Ph.D., SMIEEE Assistant Professor Converged Networks & Services (CONES) Research Group Hellenic Open
Research Challenges for Immersive Video Communication Ecosystems over Future Internet Tasos Dagiuklas, Ph.D., SMIEEE Assistant Professor Converged Networks & Services (CONES) Research Group Hellenic Open
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T
 S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
Light. Properties of light. What is light? Today What is light? How do we measure it? How does light propagate? How does light interact with matter?
 Light Properties of light Today What is light? How do we measure it? How does light propagate? How does light interact with matter? by Ted Adelson Readings Andrew Glassner, Principles of Digital Image
Light Properties of light Today What is light? How do we measure it? How does light propagate? How does light interact with matter? by Ted Adelson Readings Andrew Glassner, Principles of Digital Image
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, less
Comparison of Accommodation and Convergence by Simultaneous Measurements during 2D and 3D Vision Gaze
 Comparison of Accommodation and Convergence by Simultaneous Measurements during 2D and 3D Vision Gaze Hiroki Hori 1, Tomoki Shiomi 1, Tetsuya Kanda 1, Akira Hasegawa 1, Hiromu Ishio 1, Yasuyuki Matsuura
Comparison of Accommodation and Convergence by Simultaneous Measurements during 2D and 3D Vision Gaze Hiroki Hori 1, Tomoki Shiomi 1, Tetsuya Kanda 1, Akira Hasegawa 1, Hiromu Ishio 1, Yasuyuki Matsuura
Omni Stereo Vision of Cooperative Mobile Robots
 Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
STUDY ON DISTORTION CONSPICUITY IN STEREOSCOPICALLY VIEWED 3D IMAGES
 STUDY ON DISTORTION CONSPICUITY IN STEREOSCOPICALLY VIEWED 3D IMAGES Ming-Jun Chen, 1,3, Alan C. Bovik 1,3, Lawrence K. Cormack 2,3 Department of Electrical & Computer Engineering, The University of Texas
STUDY ON DISTORTION CONSPICUITY IN STEREOSCOPICALLY VIEWED 3D IMAGES Ming-Jun Chen, 1,3, Alan C. Bovik 1,3, Lawrence K. Cormack 2,3 Department of Electrical & Computer Engineering, The University of Texas
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Characterizing and Controlling the. Spectral Output of an HDR Display
 Characterizing and Controlling the Spectral Output of an HDR Display Ana Radonjić, Christopher G. Broussard, and David H. Brainard Department of Psychology, University of Pennsylvania, Philadelphia, PA
Characterizing and Controlling the Spectral Output of an HDR Display Ana Radonjić, Christopher G. Broussard, and David H. Brainard Department of Psychology, University of Pennsylvania, Philadelphia, PA
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Distortion Correction for Conical Multiplex Holography Using Direct Object-Image Relationship
 Proc. Natl. Sci. Counc. ROC(A) Vol. 25, No. 5, 2001. pp. 300-308 Distortion Correction for Conical Multiplex Holography Using Direct Object-Image Relationship YIH-SHYANG CHENG, RAY-CHENG CHANG, AND SHIH-YU
Proc. Natl. Sci. Counc. ROC(A) Vol. 25, No. 5, 2001. pp. 300-308 Distortion Correction for Conical Multiplex Holography Using Direct Object-Image Relationship YIH-SHYANG CHENG, RAY-CHENG CHANG, AND SHIH-YU
Advance Shadow Edge Detection and Removal (ASEDR)
") International Journal of Computational Intelligence Research ISSN 0973-1873 Volume 13, Number 2 (2017), pp. 253-259 Research India Publications http://www.ripublication.com Advance Shadow Edge Detection
International Journal of Computational Intelligence Research ISSN 0973-1873 Volume 13, Number 2 (2017), pp. 253-259 Research India Publications http://www.ripublication.com Advance Shadow Edge Detection
3D from Images - Assisted Modeling, Photogrammetry. Marco Callieri ISTI-CNR, Pisa, Italy
 3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
3D from Images - Assisted Modeling, Photogrammetry Marco Callieri ISTI-CNR, Pisa, Italy 3D from Photos Our not-so-secret dream: obtain a reliable and precise 3D from simple photos Why? Easier, cheaper
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Today. Global illumination. Shading. Interactive applications. Rendering pipeline. Computergrafik. Shading Introduction Local shading models
 Computergrafik Matthias Zwicker Universität Bern Herbst 2009 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation of physics Global
Computergrafik Matthias Zwicker Universität Bern Herbst 2009 Today Introduction Local shading models Light sources strategies Compute interaction of light with surfaces Requires simulation of physics Global
Photorealism: Ray Tracing
 Photorealism: Ray Tracing Reading Assignment: Chapter 13 Local vs. Global Illumination Local Illumination depends on local object and light sources only Global Illumination at a point can depend on any
Photorealism: Ray Tracing Reading Assignment: Chapter 13 Local vs. Global Illumination Local Illumination depends on local object and light sources only Global Illumination at a point can depend on any
Augmenting Reality with Projected Interactive Displays
 Augmenting Reality with Projected Interactive Displays Claudio Pinhanez IBM T.J. Watson Research Center, P.O. Box 218 Yorktown Heights, N.Y. 10598, USA Abstract. This paper examines a steerable projection
Augmenting Reality with Projected Interactive Displays Claudio Pinhanez IBM T.J. Watson Research Center, P.O. Box 218 Yorktown Heights, N.Y. 10598, USA Abstract. This paper examines a steerable projection
Gesture Recognition using Temporal Templates with disparity information
 8- MVA7 IAPR Conference on Machine Vision Applications, May 6-8, 7, Tokyo, JAPAN Gesture Recognition using Temporal Templates with disparity information Kazunori Onoguchi and Masaaki Sato Hirosaki University
8- MVA7 IAPR Conference on Machine Vision Applications, May 6-8, 7, Tokyo, JAPAN Gesture Recognition using Temporal Templates with disparity information Kazunori Onoguchi and Masaaki Sato Hirosaki University
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper