People detection and tracking using stereo vision and color
|
|
|
- Christian Simon
- 6 years ago
- Views:
Transcription
 995-1007.")
1 People detection and tracking using stereo vision and color Rafael Munoz-Salinas, Eugenio Aguirre, Miguel Garcia-Silvente. In Image and Vision Computing Volume 25 Issue 6 (2007) Presented by Reid Sawtell
2 Introduction The system presented by this paper is designed to take advantage of newer stereo cameras to improve person detection and tracking. Additionally, color information is used to create a more robust tracking system. Finally, all of this must be done quickly so the system can be used in real time applications.
3 Overview Design Specifications Building the Environment Stereo Processing Background Foreground Detecting and Tracking People Division of Tasks Color Modeling Detecting People Tracking People Experimental Results Future Work
4 Design Specifications Stereo camera system (instead of the popular single camera system) Color information is used to improve tracking reliability Under-head camera position
5 Why Stereo? The price has decreased and availability has increased The added depth information allows for more accurate detection and tracking Foreground objects can be separated from background objects Can filter objects to reduce false positives Added filtering also reduces the need to apply costly face detection
6 Why use color? Systems based only on position can easily confuse objects in close proximity Luminance can vary greatly from one location to another
7 Why use an under-head camera? Camera position is problem dependent It can be mounted on mobile platforms It is ideal for gesture recognition Smaller robots are less intimidating
8 Building the Environment Stereo Processing Background Modeling Foreground Extraction
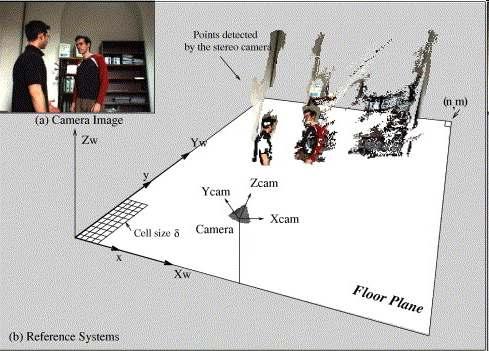
9 Stereo Processing Stereo System provides a disparity map Pixel location is calculated using known parameters Points are translated into a world model, which is likely to contain large volumes of data
10 Simplifying the Model 3D data is projected onto a 2D surface composed of uniform cells with height information Cell size must be carefully selected to balance memory/performance and reliability Filter points based on height to exclude ceiling or floor.
11 Scene reconstruction
12 Background Modeling People move, so separating them from the background is advantageous The heightmap is a model of the environment people move through Generating a reliable heightmap cannot be done instantaneously Must be updated more frequently than people are detected and tracked

13 Generating the heightmap over time
14 Detecting Foreground Objects Foreground points are easily isolated using the heightmap Occupancy map shows the distribution of foreground points over the scene Points are scaled based on proximity to camera A person is likely to be found in areas with high occupancy

15 Occupancy Map
16 Detecting and Tracking People Division of Tasks Color Modeling Detecting People Tracking People
17 Division of Tasks Face detection is computationally costly Tracked people can first be assigned to objects detected in a scene Remaining objects can then be studied as possible candidates for new people

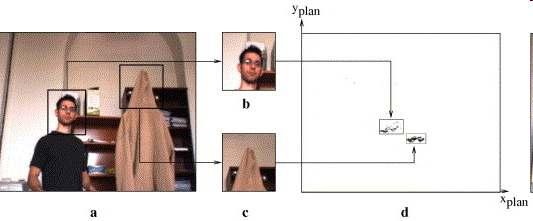
18 How objects are Classified Generate a head region based on highest point in occupancy map Place a body region underneath the head region
19 Modeling Color The color of each object is modeled as a histogram Some illuminance information is held since color is not reliable at extreme values Pixels near the center are given more weight to reduce error Color models can be compared to compute a similarity value Color model for a tracked object is updated over time

20 Similarity of Body Regions
21 Detecting People Detected object not associated with tracked people may be new people in the scene Each head region is analyzed to determine if it is similar to a human head If it is, apply face detection based on common library routines, ignore it otherwise Pruning of regions reduces computational cost and occurrence of false positives
22 Identifying People
23 Tracking People Once a person is detected, they must be tracked Assign tracked people to detected objects using Kuhn s Hungarian Method Color similarity and estimated position from the Kalman Filter are used to compute how likely each object is a given person Color similarity is important when people are in close proximity If a person is not detected for some time, they are removed from the list
24 Estimating Position with the Kalman Filter Even though the filter uses a linear movement model, it works well because the time interval is small Worst error occurs when people turn
25 Experimental Setup Used 320*240 resolution images Operational frequency is 10Hz on a 3.2 Ghz Pentium 4 laptop Configured to detect people between.5 and 2.5 meters Cameras with 4mm and 6mm focal lengths are used Number of people vary from 2 to 4 People interact in a variety of ways to try and trick the system into confusing them Tests were run with and without the use of color modeling
26 Results In every test case, the use of color modeling improved tracking success rate The 6mm camera could not track as many people as the 4mm camera Increasing the number of people decreases the success rate of tracking, especially when color is not used The use of color may allow the system to correct itself once the interacting people have separated

27 Example Scene
28 Tracking Success #People f(mm) #conflicts #NC (%) #c (%)
29 Future Work Use multi-scale techniques when creating the height and occupancy maps Avoid the use of a unique cell size in hopes of improving success without hurting performance Use additional features aside from color and position to distinguish objects, such as face identification Test the system on a mobile platform such as an autonomous robot
People detection and tracking using stereo vision and color q
 Image and Vision Computing 25 (2007) 995 1007 www.elsevier.com/locate/imavis People detection and tracking using stereo vision and color q Rafael Muñoz-Salinas a, *, Eugenio Aguirre b, Miguel García-Silvente
Image and Vision Computing 25 (2007) 995 1007 www.elsevier.com/locate/imavis People detection and tracking using stereo vision and color q Rafael Muñoz-Salinas a, *, Eugenio Aguirre b, Miguel García-Silvente
REAL-TIME TRACKING WITH AN EMBEDDED 3D CAMERA WITH FPGA PROCESSING. Alessandro Muscoloni and Stefano Mattoccia
 REAL-TIME TRACKING WITH AN EMBEDDED 3D CAMERA WITH FPGA PROCESSING Alessandro Muscoloni and Stefano Mattoccia Dipartimento di Informatica - Scienza e Ingegneria (DISI) University of Bologna Viale Risorgimento
REAL-TIME TRACKING WITH AN EMBEDDED 3D CAMERA WITH FPGA PROCESSING Alessandro Muscoloni and Stefano Mattoccia Dipartimento di Informatica - Scienza e Ingegneria (DISI) University of Bologna Viale Risorgimento
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features
 Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Vision-based Mobile Robot Localization and Mapping using Scale-Invariant Features Stephen Se, David Lowe, Jim Little Department of Computer Science University of British Columbia Presented by Adam Bickett
Occlusion Detection of Real Objects using Contour Based Stereo Matching
 Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Reliable Human Detection and Tracking in Top-View Depth Images
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Reliable Human Detection and Tracking in Top-View Depth Images Michael Rauter Austrian Institute of Technology Donau-City-Strasse
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Reliable Human Detection and Tracking in Top-View Depth Images Michael Rauter Austrian Institute of Technology Donau-City-Strasse
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION
 CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
CHAPTER 3 DISPARITY AND DEPTH MAP COMPUTATION In this chapter we will discuss the process of disparity computation. It plays an important role in our caricature system because all 3D coordinates of nodes
Stereo 3D camera supports automated storage of packaging Out of the box
 Stereo 3D camera supports automated storage of packaging Out of the box The automation of pick and place processes is one of the things that 3D machine vision does best. After all, fast and reliable identification
Stereo 3D camera supports automated storage of packaging Out of the box The automation of pick and place processes is one of the things that 3D machine vision does best. After all, fast and reliable identification
Tracking Under Low-light Conditions Using Background Subtraction
 Tracking Under Low-light Conditions Using Background Subtraction Matthew Bennink Clemson University Clemson, South Carolina Abstract A low-light tracking system was developed using background subtraction.
Tracking Under Low-light Conditions Using Background Subtraction Matthew Bennink Clemson University Clemson, South Carolina Abstract A low-light tracking system was developed using background subtraction.
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
Real Time Face Detection using Geometric Constraints, Navigation and Depth-based Skin Segmentation on Mobile Robots
 Real Time Face Detection using Geometric Constraints, Navigation and Depth-based Skin Segmentation on Mobile Robots Vo Duc My Cognitive Systems Group Computer Science Department University of Tuebingen
Real Time Face Detection using Geometric Constraints, Navigation and Depth-based Skin Segmentation on Mobile Robots Vo Duc My Cognitive Systems Group Computer Science Department University of Tuebingen
CS 4758: Automated Semantic Mapping of Environment
 CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
Topic 4 Image Segmentation
 Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Topic 4 Image Segmentation What is Segmentation? Why? Segmentation important contributing factor to the success of an automated image analysis process What is Image Analysis: Processing images to derive
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
A Texture-based Method for Detecting Moving Objects
 A Texture-based Method for Detecting Moving Objects Marko Heikkilä University of Oulu Machine Vision Group FINLAND Introduction The moving object detection, also called as background subtraction, is one
A Texture-based Method for Detecting Moving Objects Marko Heikkilä University of Oulu Machine Vision Group FINLAND Introduction The moving object detection, also called as background subtraction, is one
Brand Identification Using Gaussian Derivative Histograms
 Machine Vision and Applications manuscript No. (will be inserted by the editor) Brand Identification Using Gaussian Derivative Histograms Daniela Hall, Fabien Pélisson, Olivier Riff, James L. Crowley PRIMA
Machine Vision and Applications manuscript No. (will be inserted by the editor) Brand Identification Using Gaussian Derivative Histograms Daniela Hall, Fabien Pélisson, Olivier Riff, James L. Crowley PRIMA
Measurement of Pedestrian Groups Using Subtraction Stereo
 Measurement of Pedestrian Groups Using Subtraction Stereo Kenji Terabayashi, Yuki Hashimoto, and Kazunori Umeda Chuo University / CREST, JST, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan terabayashi@mech.chuo-u.ac.jp
Measurement of Pedestrian Groups Using Subtraction Stereo Kenji Terabayashi, Yuki Hashimoto, and Kazunori Umeda Chuo University / CREST, JST, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan terabayashi@mech.chuo-u.ac.jp
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Human Motion Detection and Tracking for Video Surveillance
 Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
Human Motion Detection and Tracking for Video Surveillance Prithviraj Banerjee and Somnath Sengupta Department of Electronics and Electrical Communication Engineering Indian Institute of Technology, Kharagpur,
3D Time-of-Flight Image Sensor Solutions for Mobile Devices
 3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l Content Introduction Motivation for 3D
A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision
 A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision Stephen Karungaru, Atsushi Ishitani, Takuya Shiraishi, and Minoru Fukumi Abstract Recently, robot technology has
A Simple Interface for Mobile Robot Equipped with Single Camera using Motion Stereo Vision Stephen Karungaru, Atsushi Ishitani, Takuya Shiraishi, and Minoru Fukumi Abstract Recently, robot technology has
Detection of Small-Waving Hand by Distributed Camera System
 Detection of Small-Waving Hand by Distributed Camera System Kenji Terabayashi, Hidetsugu Asano, Takeshi Nagayasu, Tatsuya Orimo, Mutsumi Ohta, Takaaki Oiwa, and Kazunori Umeda Department of Mechanical
Detection of Small-Waving Hand by Distributed Camera System Kenji Terabayashi, Hidetsugu Asano, Takeshi Nagayasu, Tatsuya Orimo, Mutsumi Ohta, Takaaki Oiwa, and Kazunori Umeda Department of Mechanical
Detection and Classification of Vehicles
 Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
Detection and Classification of Vehicles Gupte et al. 2002 Zeeshan Mohammad ECG 782 Dr. Brendan Morris. Introduction Previously, magnetic loop detectors were used to count vehicles passing over them. Advantages
COMP 102: Computers and Computing
 COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
COMP 102: Computers and Computing Lecture 23: Computer Vision Instructor: Kaleem Siddiqi (siddiqi@cim.mcgill.ca) Class web page: www.cim.mcgill.ca/~siddiqi/102.html What is computer vision? Broadly speaking,
Vision-based Localization of an Underwater Robot in a Structured Environment
 Vision-based Localization of an Underwater Robot in a Structured Environment M. Carreras, P. Ridao, R. Garcia and T. Nicosevici Institute of Informatics and Applications University of Girona Campus Montilivi,
Vision-based Localization of an Underwater Robot in a Structured Environment M. Carreras, P. Ridao, R. Garcia and T. Nicosevici Institute of Informatics and Applications University of Girona Campus Montilivi,
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
Computer and Machine Vision Lecture Week 10 Part-2 Skeletal Models and Face Detection March 21, 2014 Sam Siewert Outline of Week 10 Lab #4 Overview Lab #5 and #6 Extended Lab Overview SIFT and SURF High
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Robot Localization based on Geo-referenced Images and G raphic Methods
 Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
Robot Localization based on Geo-referenced Images and G raphic Methods Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, sidahmed.berrabah@rma.ac.be Janusz Bedkowski, Łukasz Lubasiński,
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.
![All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.](/thumbs/91/106597332.jpg "All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them.") All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
All human beings desire to know. [...] sight, more than any other senses, gives us knowledge of things and clarifies many differences among them. - Aristotle University of Texas at Arlington Introduction
An Object Detection System using Image Reconstruction with PCA
 An Object Detection System using Image Reconstruction with PCA Luis Malagón-Borja and Olac Fuentes Instituto Nacional de Astrofísica Óptica y Electrónica, Puebla, 72840 Mexico jmb@ccc.inaoep.mx, fuentes@inaoep.mx
An Object Detection System using Image Reconstruction with PCA Luis Malagón-Borja and Olac Fuentes Instituto Nacional de Astrofísica Óptica y Electrónica, Puebla, 72840 Mexico jmb@ccc.inaoep.mx, fuentes@inaoep.mx
Last week. Multi-Frame Structure from Motion: Multi-View Stereo. Unknown camera viewpoints
 Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Last week Multi-Frame Structure from Motion: Multi-View Stereo Unknown camera viewpoints Last week PCA Today Recognition Today Recognition Recognition problems What is it? Object detection Who is it? Recognizing
Human Detection. A state-of-the-art survey. Mohammad Dorgham. University of Hamburg
 Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
Human Detection A state-of-the-art survey Mohammad Dorgham University of Hamburg Presentation outline Motivation Applications Overview of approaches (categorized) Approaches details References Motivation
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO
 FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
FAST HUMAN DETECTION USING TEMPLATE MATCHING FOR GRADIENT IMAGES AND ASC DESCRIPTORS BASED ON SUBTRACTION STEREO Makoto Arie, Masatoshi Shibata, Kenji Terabayashi, Alessandro Moro and Kazunori Umeda Course
arxiv: v1 [cs.cv] 1 Jan 2019
![arxiv: v1 [cs.cv] 1 Jan 2019](/thumbs/93/112194933.jpg "arxiv: v1 [cs.cv] 1 Jan 2019") Mapping Areas using Computer Vision Algorithms and Drones Bashar Alhafni Saulo Fernando Guedes Lays Cavalcante Ribeiro Juhyun Park Jeongkyu Lee University of Bridgeport. Bridgeport, CT, 06606. United States
Mapping Areas using Computer Vision Algorithms and Drones Bashar Alhafni Saulo Fernando Guedes Lays Cavalcante Ribeiro Juhyun Park Jeongkyu Lee University of Bridgeport. Bridgeport, CT, 06606. United States
Gesture Recognition using Temporal Templates with disparity information
 8- MVA7 IAPR Conference on Machine Vision Applications, May 6-8, 7, Tokyo, JAPAN Gesture Recognition using Temporal Templates with disparity information Kazunori Onoguchi and Masaaki Sato Hirosaki University
8- MVA7 IAPR Conference on Machine Vision Applications, May 6-8, 7, Tokyo, JAPAN Gesture Recognition using Temporal Templates with disparity information Kazunori Onoguchi and Masaaki Sato Hirosaki University
COMS W4735: Visual Interfaces To Computers. Final Project (Finger Mouse) Submitted by: Tarandeep Singh Uni: ts2379
 Submitted by: Tarandeep Singh Uni: ts2379") COMS W4735: Visual Interfaces To Computers Final Project (Finger Mouse) Submitted by: Tarandeep Singh Uni: ts2379 FINGER MOUSE (Fingertip tracking to control mouse pointer) Abstract. This report discusses
COMS W4735: Visual Interfaces To Computers Final Project (Finger Mouse) Submitted by: Tarandeep Singh Uni: ts2379 FINGER MOUSE (Fingertip tracking to control mouse pointer) Abstract. This report discusses
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Stereo Vision Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Stereo Vision 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University What s different between these two images? Objects that are close move more or less? The amount of horizontal movement is
Theory of Stereo vision system
 Theory of Stereo vision system Introduction Stereo vision is a technique aimed at extracting depth information of a scene from two camera images. Difference in pixel position in two image produces the
Theory of Stereo vision system Introduction Stereo vision is a technique aimed at extracting depth information of a scene from two camera images. Difference in pixel position in two image produces the
Pose estimation using a variety of techniques
 Pose estimation using a variety of techniques Keegan Go Stanford University keegango@stanford.edu Abstract Vision is an integral part robotic systems a component that is needed for robots to interact robustly
Pose estimation using a variety of techniques Keegan Go Stanford University keegango@stanford.edu Abstract Vision is an integral part robotic systems a component that is needed for robots to interact robustly
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
Text-Tracking Wearable Camera System for the Blind
 2009 10th International Conference on Document Analysis and Recognition Text-Tracking Wearable Camera System for the Blind Hideaki Goto Cyberscience Center Tohoku University, Japan hgot @ isc.tohoku.ac.jp
2009 10th International Conference on Document Analysis and Recognition Text-Tracking Wearable Camera System for the Blind Hideaki Goto Cyberscience Center Tohoku University, Japan hgot @ isc.tohoku.ac.jp
How to Use Passive Infrared Sensor Cameras
 ACTi Knowledge Base Category: Application Note Sub-category: Hardware, Application Model: ACM-4201, ACM-4001, TCM-4201, TCM-4001 Firmware: N/A Software: N/A Author: Ando Meritee Published: 2010/08/23 Reviewed:
ACTi Knowledge Base Category: Application Note Sub-category: Hardware, Application Model: ACM-4201, ACM-4001, TCM-4201, TCM-4001 Firmware: N/A Software: N/A Author: Ando Meritee Published: 2010/08/23 Reviewed:
Study on the Signboard Region Detection in Natural Image
 , pp.179-184 http://dx.doi.org/10.14257/astl.2016.140.34 Study on the Signboard Region Detection in Natural Image Daeyeong Lim 1, Youngbaik Kim 2, Incheol Park 1, Jihoon seung 1, Kilto Chong 1,* 1 1567
, pp.179-184 http://dx.doi.org/10.14257/astl.2016.140.34 Study on the Signboard Region Detection in Natural Image Daeyeong Lim 1, Youngbaik Kim 2, Incheol Park 1, Jihoon seung 1, Kilto Chong 1,* 1 1567
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Dense Tracking and Mapping for Autonomous Quadrocopters. Jürgen Sturm
 Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
Computer Vision Group Prof. Daniel Cremers Dense Tracking and Mapping for Autonomous Quadrocopters Jürgen Sturm Joint work with Frank Steinbrücker, Jakob Engel, Christian Kerl, Erik Bylow, and Daniel Cremers
DPM Score Regressor for Detecting Occluded Humans from Depth Images
 DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
DPM Score Regressor for Detecting Occluded Humans from Depth Images Tsuyoshi Usami, Hiroshi Fukui, Yuji Yamauchi, Takayoshi Yamashita and Hironobu Fujiyoshi Email: usami915@vision.cs.chubu.ac.jp Email:
Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds
 1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Multimedia Technology CHAPTER 4. Video and Animation
 CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
CHAPTER 4 Video and Animation - Both video and animation give us a sense of motion. They exploit some properties of human eye s ability of viewing pictures. - Motion video is the element of multimedia
Real-time Stereo Vision for Urban Traffic Scene Understanding
 Proceedings of the IEEE Intelligent Vehicles Symposium 2000 Dearborn (MI), USA October 3-5, 2000 Real-time Stereo Vision for Urban Traffic Scene Understanding U. Franke, A. Joos DaimlerChrylser AG D-70546
Proceedings of the IEEE Intelligent Vehicles Symposium 2000 Dearborn (MI), USA October 3-5, 2000 Real-time Stereo Vision for Urban Traffic Scene Understanding U. Franke, A. Joos DaimlerChrylser AG D-70546
Towards Autonomous Vehicle. What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors
 7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
7 May 2017 Disclaimer Towards Autonomous Vehicle What is an autonomous vehicle? Vehicle driving on its own with zero mistakes How? Using sensors Why Vision Sensors? Humans use both eyes as main sense
A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification
 A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification Huei-Yung Lin * and Juang-Yu Wei Department of Electrical Engineering National Chung Cheng University Chia-Yi
A Street Scene Surveillance System for Moving Object Detection, Tracking and Classification Huei-Yung Lin * and Juang-Yu Wei Department of Electrical Engineering National Chung Cheng University Chia-Yi
Tecnologie per la ricostruzione di modelli 3D da immagini. Marco Callieri ISTI-CNR, Pisa, Italy
 Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Tecnologie per la ricostruzione di modelli 3D da immagini Marco Callieri ISTI-CNR, Pisa, Italy Who am I? Marco Callieri PhD in computer science Always had the like for 3D graphics... Researcher at the
Automatic Colorization of Grayscale Images
 Automatic Colorization of Grayscale Images Austin Sousa Rasoul Kabirzadeh Patrick Blaes Department of Electrical Engineering, Stanford University 1 Introduction ere exists a wealth of photographic images,
Automatic Colorization of Grayscale Images Austin Sousa Rasoul Kabirzadeh Patrick Blaes Department of Electrical Engineering, Stanford University 1 Introduction ere exists a wealth of photographic images,
Computationally Efficient Serial Combination of Rotation-invariant and Rotation Compensating Iris Recognition Algorithms
 Computationally Efficient Serial Combination of Rotation-invariant and Rotation Compensating Iris Recognition Algorithms Andreas Uhl Department of Computer Sciences University of Salzburg, Austria uhl@cosy.sbg.ac.at
Computationally Efficient Serial Combination of Rotation-invariant and Rotation Compensating Iris Recognition Algorithms Andreas Uhl Department of Computer Sciences University of Salzburg, Austria uhl@cosy.sbg.ac.at
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Stereo Vision 2 Inferring 3D from 2D Model based pose estimation single (calibrated) camera > Can
DEPTH ESTIMATION USING STEREO FISH-EYE LENSES
 DEPTH ESTMATON USNG STEREO FSH-EYE LENSES Shishir Shah and J. K. Aggamal Computer and Vision Research Center Department of Electrical and Computer Engineering, ENS 520 The University of Texas At Austin
DEPTH ESTMATON USNG STEREO FSH-EYE LENSES Shishir Shah and J. K. Aggamal Computer and Vision Research Center Department of Electrical and Computer Engineering, ENS 520 The University of Texas At Austin
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall Midterm Examination
 ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
ECE 172A: Introduction to Intelligent Systems: Machine Vision, Fall 2008 October 29, 2008 Notes: Midterm Examination This is a closed book and closed notes examination. Please be precise and to the point.
The XH-map algorithm: A method to process stereo video to produce a real-time obstacle map.
 The XH-map algorithm: A method to process stereo video to produce a real-time obstacle map. Donald Rosselot and Ernest L. Hall Center for Robotics Research Department of Mechanical, Industrial, and Nuclear
The XH-map algorithm: A method to process stereo video to produce a real-time obstacle map. Donald Rosselot and Ernest L. Hall Center for Robotics Research Department of Mechanical, Industrial, and Nuclear
Fast Denoising for Moving Object Detection by An Extended Structural Fitness Algorithm
 Fast Denoising for Moving Object Detection by An Extended Structural Fitness Algorithm ALBERTO FARO, DANIELA GIORDANO, CONCETTO SPAMPINATO Dipartimento di Ingegneria Informatica e Telecomunicazioni Facoltà
Fast Denoising for Moving Object Detection by An Extended Structural Fitness Algorithm ALBERTO FARO, DANIELA GIORDANO, CONCETTO SPAMPINATO Dipartimento di Ingegneria Informatica e Telecomunicazioni Facoltà
To Appear in IEEE International Symposium on Intelligent Vehicles in Parma, Italy, June 2004.
 To Appear in IEEE International Symposium on Intelligent Vehicles in Parma, Italy, June 2004. Occupant Posture Analysis using Reflectance and Stereo Images for Smart Airbag Deployment Stephen J. Krotosky
To Appear in IEEE International Symposium on Intelligent Vehicles in Parma, Italy, June 2004. Occupant Posture Analysis using Reflectance and Stereo Images for Smart Airbag Deployment Stephen J. Krotosky
3D Environment Measurement Using Binocular Stereo and Motion Stereo by Mobile Robot with Omnidirectional Stereo Camera
 3D Environment Measurement Using Binocular Stereo and Motion Stereo by Mobile Robot with Omnidirectional Stereo Camera Shinichi GOTO Department of Mechanical Engineering Shizuoka University 3-5-1 Johoku,
3D Environment Measurement Using Binocular Stereo and Motion Stereo by Mobile Robot with Omnidirectional Stereo Camera Shinichi GOTO Department of Mechanical Engineering Shizuoka University 3-5-1 Johoku,
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Indoor Object Recognition of 3D Kinect Dataset with RNNs
 Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
Indoor Object Recognition of 3D Kinect Dataset with RNNs Thiraphat Charoensripongsa, Yue Chen, Brian Cheng 1. Introduction Recent work at Stanford in the area of scene understanding has involved using
MIME: A Gesture-Driven Computer Interface
 MIME: A Gesture-Driven Computer Interface Daniel Heckenberg a and Brian C. Lovell b a Department of Computer Science and Electrical Engineering, The University of Queensland, Brisbane, Australia, 4072
MIME: A Gesture-Driven Computer Interface Daniel Heckenberg a and Brian C. Lovell b a Department of Computer Science and Electrical Engineering, The University of Queensland, Brisbane, Australia, 4072
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE
 PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
An Implementation on Object Move Detection Using OpenCV
 An Implementation on Object Move Detection Using OpenCV Professor: Dr. Ali Arya Reported by: Farzin Farhadi-Niaki Department of Systems and Computer Engineering Carleton University Ottawa, Canada I. INTRODUCTION
An Implementation on Object Move Detection Using OpenCV Professor: Dr. Ali Arya Reported by: Farzin Farhadi-Niaki Department of Systems and Computer Engineering Carleton University Ottawa, Canada I. INTRODUCTION
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Optical Flow-Based Person Tracking by Multiple Cameras
 Proc. IEEE Int. Conf. on Multisensor Fusion and Integration in Intelligent Systems, Baden-Baden, Germany, Aug. 2001. Optical Flow-Based Person Tracking by Multiple Cameras Hideki Tsutsui, Jun Miura, and
Proc. IEEE Int. Conf. on Multisensor Fusion and Integration in Intelligent Systems, Baden-Baden, Germany, Aug. 2001. Optical Flow-Based Person Tracking by Multiple Cameras Hideki Tsutsui, Jun Miura, and
Avatar Communication: Virtual Instructor in the Demonstration Exhibit
 Avatar Communication: Virtual Instructor in the Demonstration Exhibit Tetsuro Ogi 1, 2, 3, Toshio Yamada 1, Takuro Kayahara 1, 2, Yuji Kurita 1 1 Telecommunications Advancement Organization of Japan 2
Avatar Communication: Virtual Instructor in the Demonstration Exhibit Tetsuro Ogi 1, 2, 3, Toshio Yamada 1, Takuro Kayahara 1, 2, Yuji Kurita 1 1 Telecommunications Advancement Organization of Japan 2
DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD
 DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD Takeo MIYASAKA and Kazuo ARAKI Graduate School of Computer and Cognitive Sciences, Chukyo University, Japan miyasaka@grad.sccs.chukto-u.ac.jp,
DEVELOPMENT OF REAL TIME 3-D MEASUREMENT SYSTEM USING INTENSITY RATIO METHOD Takeo MIYASAKA and Kazuo ARAKI Graduate School of Computer and Cognitive Sciences, Chukyo University, Japan miyasaka@grad.sccs.chukto-u.ac.jp,
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Advance Shadow Edge Detection and Removal (ASEDR)
") International Journal of Computational Intelligence Research ISSN 0973-1873 Volume 13, Number 2 (2017), pp. 253-259 Research India Publications http://www.ripublication.com Advance Shadow Edge Detection
International Journal of Computational Intelligence Research ISSN 0973-1873 Volume 13, Number 2 (2017), pp. 253-259 Research India Publications http://www.ripublication.com Advance Shadow Edge Detection
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
ФУНДАМЕНТАЛЬНЫЕ НАУКИ. Информатика 9 ИНФОРМАТИКА MOTION DETECTION IN VIDEO STREAM BASED ON BACKGROUND SUBTRACTION AND TARGET TRACKING
 ФУНДАМЕНТАЛЬНЫЕ НАУКИ Информатика 9 ИНФОРМАТИКА UDC 6813 OTION DETECTION IN VIDEO STREA BASED ON BACKGROUND SUBTRACTION AND TARGET TRACKING R BOGUSH, S ALTSEV, N BROVKO, E IHAILOV (Polotsk State University
ФУНДАМЕНТАЛЬНЫЕ НАУКИ Информатика 9 ИНФОРМАТИКА UDC 6813 OTION DETECTION IN VIDEO STREA BASED ON BACKGROUND SUBTRACTION AND TARGET TRACKING R BOGUSH, S ALTSEV, N BROVKO, E IHAILOV (Polotsk State University
CSE 4392/5369. Dr. Gian Luca Mariottini, Ph.D.
 University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
University of Texas at Arlington CSE 4392/5369 Introduction to Vision Sensing Dr. Gian Luca Mariottini, Ph.D. Department of Computer Science and Engineering University of Texas at Arlington WEB : http://ranger.uta.edu/~gianluca
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES
 FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
CS 4758 Robot Navigation Through Exit Sign Detection
 CS 4758 Robot Navigation Through Exit Sign Detection Aaron Sarna Michael Oleske Andrew Hoelscher Abstract We designed a set of algorithms that utilize the existing corridor navigation code initially created
CS 4758 Robot Navigation Through Exit Sign Detection Aaron Sarna Michael Oleske Andrew Hoelscher Abstract We designed a set of algorithms that utilize the existing corridor navigation code initially created
A490 Machine Vision and Computer Graphics
 A490 Machine Vision and Computer Graphics Lecture Week 11 (More on Convolutions and Introduction to Boundary, Shape and Skeletal Models) November 6, 2012 Sam Siewert More on Convolution FCG Chapter 9 -
A490 Machine Vision and Computer Graphics Lecture Week 11 (More on Convolutions and Introduction to Boundary, Shape and Skeletal Models) November 6, 2012 Sam Siewert More on Convolution FCG Chapter 9 -
A Real Time System for Detecting and Tracking People. Ismail Haritaoglu, David Harwood and Larry S. Davis. University of Maryland
 W 4 : Who? When? Where? What? A Real Time System for Detecting and Tracking People Ismail Haritaoglu, David Harwood and Larry S. Davis Computer Vision Laboratory University of Maryland College Park, MD
W 4 : Who? When? Where? What? A Real Time System for Detecting and Tracking People Ismail Haritaoglu, David Harwood and Larry S. Davis Computer Vision Laboratory University of Maryland College Park, MD
Realtime Omnidirectional Stereo for Obstacle Detection and Tracking in Dynamic Environments
 Proc. 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems pp. 31-36, Maui, Hawaii, Oct./Nov. 2001. Realtime Omnidirectional Stereo for Obstacle Detection and Tracking in Dynamic Environments Hiroshi
Proc. 2001 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems pp. 31-36, Maui, Hawaii, Oct./Nov. 2001. Realtime Omnidirectional Stereo for Obstacle Detection and Tracking in Dynamic Environments Hiroshi
A method for depth-based hand tracing
 A method for depth-based hand tracing Khoa Ha University of Maryland, College Park khoaha@umd.edu Abstract An algorithm for natural human-computer interaction via in-air drawing is detailed. We discuss
A method for depth-based hand tracing Khoa Ha University of Maryland, College Park khoaha@umd.edu Abstract An algorithm for natural human-computer interaction via in-air drawing is detailed. We discuss
Data-driven Depth Inference from a Single Still Image
 Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Data-driven Depth Inference from a Single Still Image Kyunghee Kim Computer Science Department Stanford University kyunghee.kim@stanford.edu Abstract Given an indoor image, how to recover its depth information
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Website:
 Kizlon Medical Email: info@kizlonmedical.com Website: www.kizlonmedical.com Digital Video Colposcope KDC-A1 series KDC-A100 colposcope with its software specifically designed to take high resolution pictures
Kizlon Medical Email: info@kizlonmedical.com Website: www.kizlonmedical.com Digital Video Colposcope KDC-A1 series KDC-A100 colposcope with its software specifically designed to take high resolution pictures
DETECTION OF SCREWS ON METAL CEILING STRUCTURES FOR DISMANTLING SYSTEMS
 DETECTION OF SCREWS ON METAL CEILING STRUCTURES FOR DISMANTLING SYSTEMS S. Rolando Cruz-Ramírez, Yasushi Mae, Yuusuke Ishizuka, Tomohito Takubo and Tatsuo Arai Department of Systems Innovation Graduate
DETECTION OF SCREWS ON METAL CEILING STRUCTURES FOR DISMANTLING SYSTEMS S. Rolando Cruz-Ramírez, Yasushi Mae, Yuusuke Ishizuka, Tomohito Takubo and Tatsuo Arai Department of Systems Innovation Graduate
A Statistical Approach to Culture Colors Distribution in Video Sensors Angela D Angelo, Jean-Luc Dugelay
 A Statistical Approach to Culture Colors Distribution in Video Sensors Angela D Angelo, Jean-Luc Dugelay VPQM 2010, Scottsdale, Arizona, U.S.A, January 13-15 Outline Introduction Proposed approach Colors
A Statistical Approach to Culture Colors Distribution in Video Sensors Angela D Angelo, Jean-Luc Dugelay VPQM 2010, Scottsdale, Arizona, U.S.A, January 13-15 Outline Introduction Proposed approach Colors
STEREO-VISION SYSTEM PERFORMANCE ANALYSIS
 STEREO-VISION SYSTEM PERFORMANCE ANALYSIS M. Bertozzi, A. Broggi, G. Conte, and A. Fascioli Dipartimento di Ingegneria dell'informazione, Università di Parma Parco area delle Scienze, 181A I-43100, Parma,
STEREO-VISION SYSTEM PERFORMANCE ANALYSIS M. Bertozzi, A. Broggi, G. Conte, and A. Fascioli Dipartimento di Ingegneria dell'informazione, Università di Parma Parco area delle Scienze, 181A I-43100, Parma,
Generating and Learning from 3D Models of Objects through Interactions. by Kiana Alcala, Kathryn Baldauf, Aylish Wrench
 Generating and Learning from 3D Models of Objects through Interactions by Kiana Alcala, Kathryn Baldauf, Aylish Wrench Abstract For our project, we plan to implement code on the robotic arm that will allow
Generating and Learning from 3D Models of Objects through Interactions by Kiana Alcala, Kathryn Baldauf, Aylish Wrench Abstract For our project, we plan to implement code on the robotic arm that will allow
A Robust Two Feature Points Based Depth Estimation Method 1)
") Vol.31, No.5 ACTA AUTOMATICA SINICA September, 2005 A Robust Two Feature Points Based Depth Estimation Method 1) ZHONG Zhi-Guang YI Jian-Qiang ZHAO Dong-Bin (Laboratory of Complex Systems and Intelligence
Vol.31, No.5 ACTA AUTOMATICA SINICA September, 2005 A Robust Two Feature Points Based Depth Estimation Method 1) ZHONG Zhi-Guang YI Jian-Qiang ZHAO Dong-Bin (Laboratory of Complex Systems and Intelligence
Agent Mobility. Overview. mobile agents and mobile computing. technical issues agent languages, distributed execution, environment, security
 Agent Mobility Overview mobile agents and mobile computing technical issues agent languages, distributed execution, environment, security multi-agent systems cooperation between agents to solve a task
Agent Mobility Overview mobile agents and mobile computing technical issues agent languages, distributed execution, environment, security multi-agent systems cooperation between agents to solve a task
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Human Body Recognition and Tracking: How the Kinect Works. Kinect RGB-D Camera. What the Kinect Does. How Kinect Works: Overview
 Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due
Human Body Recognition and Tracking: How the Kinect Works Kinect RGB-D Camera Microsoft Kinect (Nov. 2010) Color video camera + laser-projected IR dot pattern + IR camera $120 (April 2012) Kinect 1.5 due