3D Time-of-Flight Image Sensor Solutions for Mobile Devices
|
|
|
- Daisy Sullivan
- 5 years ago
- Views:
Transcription



1 3D Time-of-Flight Image Sensor Solutions for Mobile Devices SEMICON Europa 2015 Imaging Conference Bernd Buxbaum 2015 pmdtechnologies gmbh c o n f i d e n t i a l
2 Content Introduction Motivation for 3D in mobile 3D-Imaging techniques: A comparison between the approaches CamBoard pico flexx - a new reference design for mobile Roamdap and Applications 2015 pmdtechnologies gmbh 2
3 Content Introduction Motivation for 3D in mobile 3D-Imaging techniques: A comparison between the approaches CamBoard pico flexx - a new reference design for mobile Roadmap and Applications 2015 pmdtechnologies gmbh 3
4 Introduction - Who are we? pmd was founded 2002 as a fabless IC company pmd is the leading 3D ToF chip technology provider pmd owns 150+ patent applications safeguarding the technology and applications pmd owns the most mature freely available 3D-ToF technology worldwide: 10,000 customers use pmd based products since Million pmd sensors were sold up to date in Robotics and Industrial applications 30 Million+ USD revenue with pmd based products & services (FYF 2015) Consumer Design Wins will open up the mass market from 2016 Automotive will follow the consumer ramp from pmdtechnologies gmbh 4


5 Introduction - Where are we? Headquarters Siegen, Germany Branch Dresden, Germany Branch San José, California Global Footprint through pmd s corporate structure N S Hamburg Berlin Cologne Siegen Dresden Frankfurt Munich pmdtechnologies gmbh 5






6 Introduction - What is pmd offering? 3D Time-of-Flight pixel design Offering 3D imagers directly or via partners 3D Camera System layout support, reference designs 2015 pmdtechnologies gmbh 6






7 Introduction - What is the product? Time-of-Flight (ToF) single-chip FPA CMOS technology SoC integration Design-in support Chip Sales channel ToF pixel design Reference designs System & calibration support Post-Processing support Joint Development Joint Marketing Joint Application Support 2015 pmdtechnologies gmbh 7
8 Introduction - What is the product? Highest Level of Integration Best Performance and Robustness Highest Flexibility and Functionality Integrated A/D converters for full digital readout Integrated CSI-2 interface Integrated controller and logic for Illumination control Pixel matrix modulation Autonomous imaging phase sequences Optimized technology for highest photo sensitivity Patented Suppression of Background Illumination (SBI) Fast data readout for lowest latency (~4ms) Support of high frame rates (>100fps) Intelligent power management (clock/power gating) Flexible SW configuration Frame rate adaptation Configurable exposure time Amount of phase measurements Up to 100MHz modulation frequency Dedicated variants for different pixel resolution (19k, 38k, 100k) Configurable region of interest (ROI) Smallest form factor Reliable indoor & outdoor operation Dynamically configurable during operation 2015 pmdtechnologies gmbh 8
9 Content Introduction Motivation for 3D in mobile 3D-Imaging techniques: A comparison between the approaches CamBoard pico flexx - a new reference design for mobile Roadmap and Applications 2015 pmdtechnologies gmbh 9



10 Motivation for 3D in mobile Giving mobile devices a human-scale understanding of space and motion ToF part: Lens with ToF imager behind VCSEL illumination 12mm x 12mm x 7mm Needed real estate : 3cm² Up to 4m range with depth error of <1% Superior background light performance 80 FOV, 19kpixel resolution 1x VCSEL illumination Module size: 3cm² 5fps <300mW power consumption camera frontend example 12 x 12 x 7mm 2015 pmdtechnologies gmbh 10




11 Motivation for 3D in mobile Hand tracking in Virtual Reality and 3D environmental awareness Two operation modes with one ToF camera 1. Hand tracking: <1m, 45fps, 300mW Use your hands in the virtual world 2. Environmental Awareness <4m, 5fps, 300mW Augment real objects into the virtual world Avoid collisions while moving Camera with wide opening angle should be used for best user experience 2015 pmdtechnologies gmbh 11
12 Motivation for 3D in mobile 2015 pmdtechnologies gmbh 12
13 Content Introduction Motivation for 3D in mobile 3D-Imaging techniques: A comparison between the approaches CamBoard pico flexx - a new reference design for mobile Roadmap and Applications 2015 pmdtechnologies gmbh 13

14 3D-Imaging techniques: Passive Stereo Stereo Vision Depth through disparity measurement: Two standard 2D cameras are used capturing the scenery from different angles to calculate the distance Benefits Standard imagers can be used Thin module height Cheap solutions possible (but becomes higher cost when performance shall be improved: e.g. global shutter, IR illumination) No conceptual limit on frame rates Weaknesses Physical baseline required trade off between accuracy at long range and close range operation Big x-dimension of module because of baseline Precise mechanical alignment and re-calibration needed High computational load through complex, computationally intensive algorithms Limitation in bad and changing light conditions, shadows and intensity differences 2015 pmdtechnologies gmbh 14
 Robust against multi-path interference Weaknesses Complex camera through active illumination Precise and stable mechanical alignment")
15 3D-Imaging techniques: Active Stereo Structured Light A known pattern is projected onto the scenery and the depth is achieved by inspecting the pattern distortion Benefits No conceptual limit on frame rates No motion blur (in case static pattern is used) Robust against multi-path interference Weaknesses Complex camera through active illumination Precise and stable mechanical alignment between lens and pattern projector needed High calibration efforts; risk of de-calibration Strong interpolation of depth data. No relation between high 2D imager resolution and real 3D point cloud Reflected pattern is sensitive to optical interference or structures and textures in the environment 2015 pmdtechnologies gmbh 15

16 3D-Imaging techniques: Time-of-Flight (ToF) Time-of-Flight The phase shift between the modulated illumination and the reflection is measured and translated to distance Benefits Direct measurement of depth and amplitude in every pixel Small form factor and monocular system architecture No mechanical baseline: no special requirements on mechanical stability, no mechanical alignment and angle correction required No risk of de-calibration due to drops, vibrations or thermal bending Easy once-in-a-lifetime calibration Operation in any light condition Weaknesses Complex camera through active illumination z-height vs. resolution Multi-path interference 2015 pmdtechnologies gmbh 16
17 3D-Imaging techniques: Comparison Stereo Vision Structured Light Time-of-Flight Depth accuracy Low Medium High Range vs. accuracy Limited Limited Scalable Power Consumption (camera only) Low Scalable Scalable Software Complexity, Computational Load High High Low Low-Light Performance Weak Good Good Bright-Light Performance Good Weak Good Changing Light Conditions Weak Weak Good Night Vision No Yes Yes z-height vs. resolution Low Low Medium Module size (x-dimension), PCB Design limitations High High Low Manufacturing & Calibration efforts High High Low Material Cost Low Medium Medium 2015 pmdtechnologies gmbh 17
18 3D-Imaging techniques: Comparison Time-of-Flight is... highly scalable to dedicated application specs very lean in terms of computational load... a very robust depth sensing technology easy to calibrate (one-time and fast) very mature (since 2005) 2015 pmdtechnologies gmbh 18


19 Sequence Controller depth map calculation 3D-Imaging techniques: Time-of-Flight (ToF) 1 Active illumination with modulated IR-light 2 transmitted reflected Phase Shift Distance measurement in the time-domain 3 Annotated depth map including amplitude image as a quality-indicator Depth Camera LED or VCSEL Modulation I²C Pixel Matrix amplitude 3D scene Lens A/D Converter 3D image raw data depth 3D-ToF FPA MIPI CSI-2 Host Controller 2015 pmdtechnologies gmbh 19
20 Content Introduction Motivation for 3D in mobile 3D-Imaging techniques: A comparison between the approaches CamBoard pico flexx - a new reference design for mobile Roadmap and Applications 2015 pmdtechnologies gmbh 20

21 CamBoard pico flexx 2015 pmdtechnologies gmbh 21

22 CamBoard pico flexx 2015 pmdtechnologies gmbh 22
23 CamBoard pico flexx Dual Mode operation with one perception shot, thus without loosing frame rate Both faster short-range as well as slower far-range depth maps in parallel The depth maps delivers same data quality in near as well as in far range This unique feature is enabled due to the principle of ToF and a flexible mode of operation, changeable frame by frame I2C on-chip programmable registers are used to reconfigure the chip on the fly 2015 pmdtechnologies gmbh 23
24 Content Introduction Motivation for 3D in mobile 3D-Imaging techniques: A comparison between the approaches CamBoard pico flexx - a new reference design for mobile Roadmap and Applications 2015 pmdtechnologies gmbh 24

25 Roadmap and Applications Sales name Resolution Package IRS1020C CIF: 352 x 288 pixel (100k imager) bare die IRS1010C QVGA: 160 x 120 pixel (19k imager) bare die ROI is flexible: Other pixel resolution below 100k can be defined by SW Engineering Sample are available SOP: Q pmdtechnologies gmbh 25





 USP single-chip no")

26 Roadmap and Applications 3D Room- & Object Scanning Virtual- & Augmented Reality Gesture Control & Virtual MMI enhanced 2D camera features e.g. autofocus Computational Photography Secure Face Recognition All-in-One Laptop Tablet Smartphone VR Sunlight robustness Smallest form factor Scalability to application requirements patented SBI (suppression of background illumination) USP single-chip no mechanical baseline USP meeting power consumption and self-heating requirements of mobile devices 2015 pmdtechnologies gmbh 26
27 Thank you for your attention! 2015 pmdtechnologies gmbh 27
Time-of-flight basics
 Contents 1. Introduction... 2 2. Glossary of Terms... 3 3. Recovering phase from cross-correlation... 4 4. Time-of-flight operating principle: the lock-in amplifier... 6 5. The time-of-flight sensor pixel...
Contents 1. Introduction... 2 2. Glossary of Terms... 3 3. Recovering phase from cross-correlation... 4 4. Time-of-flight operating principle: the lock-in amplifier... 6 5. The time-of-flight sensor pixel...
Photoneo's brand new PhoXi 3D Camera is the highest resolution and highest accuracy area based 3D
 Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
Company: Photoneo s.r.o. Germany Contact: Veronika Pulisova E-mail: pulisova@photoneo.com PhoXi 3D Camera Author: Tomas Kovacovsky & Jan Zizka Description of the innovation: General description Photoneo's
ToF Camera for high resolution 3D images with affordable pricing
 ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
ToF Camera for high resolution 3D images with affordable pricing Basler AG Jana Bartels, Product Manager 3D Agenda Coming next I. Basler AG II. 3D Purpose and Time-of-Flight - Working Principle III. Advantages
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.
![PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.](/thumbs/72/67823170.jpg "PMD [vision] Day Vol. 3 Munich, November 18, PMD Cameras for Automotive & Outdoor Applications. ifm electronic gmbh, V.Frey. Dr.") R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
R PMD [vision] Day Vol. 3 Munich, November 18, 2010 Dr. Volker Frey ifm electronic gmbh PMD Cameras for Automotive & Outdoor Applications Stand: 27.10.2010 Seite 1 I Working Principle PMD distance measurement
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect
 A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
A Comparison between Active and Passive 3D Vision Sensors: BumblebeeXB3 and Microsoft Kinect Diana Beltran and Luis Basañez Technical University of Catalonia, Barcelona, Spain {diana.beltran,luis.basanez}@upc.edu
Visual Perception Sensors
 G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
G. Glaser Visual Perception Sensors 1 / 27 MIN Faculty Department of Informatics Visual Perception Sensors Depth Determination Gerrit Glaser University of Hamburg Faculty of Mathematics, Informatics and
MACHINE VISION FOR SMARTPHONES. Essential machine vision camera requirements to fulfill the needs of our society
 MACHINE VISION FOR SMARTPHONES Essential machine vision camera requirements to fulfill the needs of our society INTRODUCTION With changes in our society, there is an increased demand in stateof-the art
MACHINE VISION FOR SMARTPHONES Essential machine vision camera requirements to fulfill the needs of our society INTRODUCTION With changes in our society, there is an increased demand in stateof-the art
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
MotionCam-3D. The highest resolution and highest accuracy area based 3D camera in the world. Jan Zizka, CEO AWARD 2018
 MotionCam-3D AWARD 2018 The highest resolution and highest accuracy area based 3D camera in the world Jan Zizka, CEO 3D Scanning Scanning of static scenes 3D Scanners Scanning in motion 3D Cameras Ensenso
MotionCam-3D AWARD 2018 The highest resolution and highest accuracy area based 3D camera in the world Jan Zizka, CEO 3D Scanning Scanning of static scenes 3D Scanners Scanning in motion 3D Cameras Ensenso
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Infineon Sensor solutions
 Infineon solutions ATV SVD PMM RFS DEM PMM Nov.2016 restricted AGENDA 1 IFX sensor solution 2 products line up 3 Major product figure and specification 4 Brochure 2 IFX solutions Type RFS / PMM Potential
Infineon solutions ATV SVD PMM RFS DEM PMM Nov.2016 restricted AGENDA 1 IFX sensor solution 2 products line up 3 Major product figure and specification 4 Brochure 2 IFX solutions Type RFS / PMM Potential
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
POME A mobile camera system for accurate indoor pose
 POME A mobile camera system for accurate indoor pose Paul Montgomery & Andreas Winter November 2 2016 2010. All rights reserved. 1 ICT Intelligent Construction Tools A 50-50 joint venture between Trimble
POME A mobile camera system for accurate indoor pose Paul Montgomery & Andreas Winter November 2 2016 2010. All rights reserved. 1 ICT Intelligent Construction Tools A 50-50 joint venture between Trimble
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
The Benefits of GPU Compute on ARM Mali GPUs
 The Benefits of GPU Compute on ARM Mali GPUs Tim Hartley 1 SEMICON Europa 2014 ARM Introduction World leading semiconductor IP Founded in 1990 1060 processor licenses sold to more than 350 companies >
The Benefits of GPU Compute on ARM Mali GPUs Tim Hartley 1 SEMICON Europa 2014 ARM Introduction World leading semiconductor IP Founded in 1990 1060 processor licenses sold to more than 350 companies >
High resolution Low noise High dynamic range Unparalleled sensitivity. Vision At Its Best
 High resolution Low noise High dynamic range Unparalleled sensitivity Vision At Its Best MEGAPLUS MEGAPLUS brand cameras are renowned worldwide for producing unmatched image quality and delivering the
High resolution Low noise High dynamic range Unparalleled sensitivity Vision At Its Best MEGAPLUS MEGAPLUS brand cameras are renowned worldwide for producing unmatched image quality and delivering the
Depth Camera for Mobile Devices
 Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
Depth Camera for Mobile Devices Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Stereo Cameras Structured Light Cameras Time of Flight (ToF) Camera Inferring 3D Points Given we have
ESPROS Photonics Corporation
 Next generation pulsed time-of-flight sensors for autonomous driving Beat De Coi 1 Topics ADAS requirements Sensor technology overview ESPROS CCD/CMOS technology OHC15LTM Technology comparison of receiver
Next generation pulsed time-of-flight sensors for autonomous driving Beat De Coi 1 Topics ADAS requirements Sensor technology overview ESPROS CCD/CMOS technology OHC15LTM Technology comparison of receiver
TRANSIENT IMAGING. Freshman Imaging Project 2014
 1 TRANSIENT IMAGING Freshman Imaging Project 2014 2 Outline What is transient imaging? Previous work: MIT, UBC Possible applications of transient imaging Theory behind transient imaging Our goals Technology
1 TRANSIENT IMAGING Freshman Imaging Project 2014 2 Outline What is transient imaging? Previous work: MIT, UBC Possible applications of transient imaging Theory behind transient imaging Our goals Technology
1. FY2017 Review 2. FY2018 Action Plan 3. FY2018 FY2020 Mid-Range Plan
 May 22, 2018 Terushi Shimizu Business Executive Sony Corporation Representative Director and President Sony Semiconductor Solutions Corporation Agenda 1. FY2017 Review 2. FY2018 Action Plan 3. FY2018 FY2020
May 22, 2018 Terushi Shimizu Business Executive Sony Corporation Representative Director and President Sony Semiconductor Solutions Corporation Agenda 1. FY2017 Review 2. FY2018 Action Plan 3. FY2018 FY2020
PhenoBot: A Robot System for Phenotyping in the Greenhouse Using 3D Light-Field Technology
 PhenoBot: A Robot System for Phenotyping in the Greenhouse Using 3D Light-Field Technology IEEE TC Agricultural Robotics - AgRA Webinar #20 August 27, 2014. Gerrit Polder, Jan Willem Hofstee, Wageningen
PhenoBot: A Robot System for Phenotyping in the Greenhouse Using 3D Light-Field Technology IEEE TC Agricultural Robotics - AgRA Webinar #20 August 27, 2014. Gerrit Polder, Jan Willem Hofstee, Wageningen
Hand Segmentation Using 2D/3D Images
 S. E. Ghobadi, O. E. Loepprich, K. Hartmann, O. Loffeld, Hand Segmentation using D/3D Images, Proceedings of Image and Vision Computing New Zealand 007, pp. 6 69, Hamilton, New Zealand, December 007. Hand
S. E. Ghobadi, O. E. Loepprich, K. Hartmann, O. Loffeld, Hand Segmentation using D/3D Images, Proceedings of Image and Vision Computing New Zealand 007, pp. 6 69, Hamilton, New Zealand, December 007. Hand
Active Light Time-of-Flight Imaging
 Active Light Time-of-Flight Imaging Time-of-Flight Pulse-based time-of-flight scanners [Gvili03] NOT triangulation based short infrared laser pulse is sent from camera reflection is recorded in a very
Active Light Time-of-Flight Imaging Time-of-Flight Pulse-based time-of-flight scanners [Gvili03] NOT triangulation based short infrared laser pulse is sent from camera reflection is recorded in a very
VZ-C3D Visualizer. Bringing reality closer in 3D
 EN VZ-C3D Visualizer Bringing reality closer in 3D Introducing the world s first 3D Visualizer VZ-C3D Ceiling Visualizer WolfVision is a globally successful family owned company based in Austria/Europe.
EN VZ-C3D Visualizer Bringing reality closer in 3D Introducing the world s first 3D Visualizer VZ-C3D Ceiling Visualizer WolfVision is a globally successful family owned company based in Austria/Europe.
TCM-5311 Configuration Advice for Indoor and
 ACTi Knowledge Base Category: Installation & Configuration Note Sub-category: Video Quality, Application Model: TCM-5311 Firmware: 4.06.09 Software: N/A Published: 2009/08/24 Reviewed: 2009/12/09 TCM-5311
ACTi Knowledge Base Category: Installation & Configuration Note Sub-category: Video Quality, Application Model: TCM-5311 Firmware: 4.06.09 Software: N/A Published: 2009/08/24 Reviewed: 2009/12/09 TCM-5311
Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner
 AARMS Vol. 15, No. 1 (2016) 51 59. Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner Peter KUCSERA 1 Thanks to the developing sensor technology in mobile robot navigation
AARMS Vol. 15, No. 1 (2016) 51 59. Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner Peter KUCSERA 1 Thanks to the developing sensor technology in mobile robot navigation
Sensor technology for mobile robots
 Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Laser application, vision application, sonar application and sensor fusion (6wasserf@informatik.uni-hamburg.de) Outline Introduction Mobile robots perception Definitions Sensor classification Sensor Performance
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Z-LASER Improved Beam Modeling With Optical Fibers. Vision Technology Forum April 15th, 2015
 Z-LASER Improved Beam Modeling With Optical Fibers Vision Technology Forum April 15th, 2015 Laser for 3D-Measurement One typical application is the optical 3D measurement of an object with laser triangulation
Z-LASER Improved Beam Modeling With Optical Fibers Vision Technology Forum April 15th, 2015 Laser for 3D-Measurement One typical application is the optical 3D measurement of an object with laser triangulation
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
Using infrared proximity sensors for close 2D localization and object size recognition. Richard Berglind Neonode
 Using infrared proximity sensors for close 2D localization and object size recognition Richard Berglind Neonode Outline Overview of sensor types IR proximity sensors and their drawbacks Principles of a
Using infrared proximity sensors for close 2D localization and object size recognition Richard Berglind Neonode Outline Overview of sensor types IR proximity sensors and their drawbacks Principles of a
MULTI-MODAL MAPPING. Robotics Day, 31 Mar Frank Mascarich, Shehryar Khattak, Tung Dang
 MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
MULTI-MODAL MAPPING Robotics Day, 31 Mar 2017 Frank Mascarich, Shehryar Khattak, Tung Dang Application-Specific Sensors Cameras TOF Cameras PERCEPTION LiDAR IMU Localization Mapping Autonomy Robotic Perception
Prasanna Krishnaswamy Intel Platform Architect. Imaging Systems Design for Mixed Reality Scenarios
 Prasanna Krishnaswamy Platform Architect Imaging Systems Design for Mixed Reality Scenarios Agenda Mixed Reality (MR) Introduction Key Use Cases MR System Design Overview Imaging Sensors for MR Use Case
Prasanna Krishnaswamy Platform Architect Imaging Systems Design for Mixed Reality Scenarios Agenda Mixed Reality (MR) Introduction Key Use Cases MR System Design Overview Imaging Sensors for MR Use Case
A Qualitative Analysis of 3D Display Technology
 A Qualitative Analysis of 3D Display Technology Nicholas Blackhawk, Shane Nelson, and Mary Scaramuzza Computer Science St. Olaf College 1500 St. Olaf Ave Northfield, MN 55057 scaramum@stolaf.edu Abstract
A Qualitative Analysis of 3D Display Technology Nicholas Blackhawk, Shane Nelson, and Mary Scaramuzza Computer Science St. Olaf College 1500 St. Olaf Ave Northfield, MN 55057 scaramum@stolaf.edu Abstract
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR
 Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
Why the Self-Driving Revolution Hinges on one Enabling Technology: LiDAR Markus Prison Director Business Development Europe Quanergy ID: 23328 Who We Are The leader in LiDAR (laser-based 3D spatial sensor)
High speed CMOS image sensors Wim Wuyts Sr. Staff Applications Engineer Cypress Semiconductor Corporation Belgium Vision 2006
 High speed CMOS image sensors Wim Wuyts Sr. Staff Applications Engineer Cypress Semiconductor Corporation Belgium Vision 2006 P E R F O R M Outline Introduction Architecture Analog high speed CIS Digital
High speed CMOS image sensors Wim Wuyts Sr. Staff Applications Engineer Cypress Semiconductor Corporation Belgium Vision 2006 P E R F O R M Outline Introduction Architecture Analog high speed CIS Digital
Basler IP Cameras. The Most Powerful IP Camera Concept. Megapixel. Day/Night H.264
 Basler IP Cameras Megapixel Day/Night H.264 The Most Powerful IP Camera Concept BASLER IP CAMERAS Features and Benefits The Basler IP camera product line offers flexible, high-performance solutions for
Basler IP Cameras Megapixel Day/Night H.264 The Most Powerful IP Camera Concept BASLER IP CAMERAS Features and Benefits The Basler IP camera product line offers flexible, high-performance solutions for
3D MACHINE VISION PLATFORM
 3D MACHINE VISION PLATFORM AGENDA Company Overview Market Positioning Product Portfolio Applications 2 History & Business Model LIPS was founded in 2013 by a team consisting of research scholars from
3D MACHINE VISION PLATFORM AGENDA Company Overview Market Positioning Product Portfolio Applications 2 History & Business Model LIPS was founded in 2013 by a team consisting of research scholars from
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices
 Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
Emerging Vision Technologies: Enabling a New Era of Intelligent Devices Computer vision overview Computer vision is being integrated in our daily lives Acquiring, processing, and understanding visual data
World s Smallest Time-of-Flight Proximity/Ranging Sensor. ST Imaging Marcus (Xiaoyong) Yang Product Marketing Manager
 Yang Product Marketing Manager") World s Smallest Time-of-Flight Proximity/Ranging Sensor ST Imaging Marcus (Xiaoyong) Yang Product Marketing Manager FlightSense Breakthrough Technology 2 Measurement at the true speed of light! FlightSense
World s Smallest Time-of-Flight Proximity/Ranging Sensor ST Imaging Marcus (Xiaoyong) Yang Product Marketing Manager FlightSense Breakthrough Technology 2 Measurement at the true speed of light! FlightSense
Flexible Visual Inspection. IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO
 Flexible Visual Inspection IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO IT+Robotics Spin-off of University of Padua founded in 2005 Strong relationship with IAS-LAB (Intelligent
Flexible Visual Inspection IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO IT+Robotics Spin-off of University of Padua founded in 2005 Strong relationship with IAS-LAB (Intelligent
Computer and Machine Vision
 Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Computer and Machine Vision Lecture Week 12 Part-2 Additional 3D Scene Considerations March 29, 2014 Sam Siewert Outline of Week 12 Computer Vision APIs and Languages Alternatives to C++ and OpenCV API
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
SWIR Vision Systems Acuros TM CQD TM SWIR Cameras. November 2018 SWIR VISION SYSTEM
 SWIR Vision Systems Acuros TM CQD TM SWIR Cameras November 2018 SWIR VISION SYSTEM Introducing Quantum Dots for short-wave IR imaging! Acuros TM CQD TM films turn silicon ICs into infrared sensors Encapsulant
SWIR Vision Systems Acuros TM CQD TM SWIR Cameras November 2018 SWIR VISION SYSTEM Introducing Quantum Dots for short-wave IR imaging! Acuros TM CQD TM films turn silicon ICs into infrared sensors Encapsulant
New! 3D Smart Sensor your assistant on mobile machines. ifm.com/us/mobile
 New! 3D Smart Sensor your assistant on mobile machines ifm.com/us/mobile 1 See objects with ifm s 3D Smart Sensor Your assistant on mobile machines Obstacle detection challenges are amplified on large
New! 3D Smart Sensor your assistant on mobile machines ifm.com/us/mobile 1 See objects with ifm s 3D Smart Sensor Your assistant on mobile machines Obstacle detection challenges are amplified on large
Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping
 93 Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping Ralph Klose, Jaime Penlington, Arno Ruckelshausen University of Applied Sciences Osnabrück/ Faculty of Engineering and Computer
93 Usability study of 3D Time-of-Flight cameras for automatic plant phenotyping Ralph Klose, Jaime Penlington, Arno Ruckelshausen University of Applied Sciences Osnabrück/ Faculty of Engineering and Computer
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
5MP Global Shutter. High Dynamic Range Global Shutter CMOS Sensor
 High Dynamic Range Global Shutter CMOS Sensor 5MP Global Shutter 1. Background CMOS Image sensors with a global shutter (GS) are ideal for a variety of applications including factory automation, unmanned
High Dynamic Range Global Shutter CMOS Sensor 5MP Global Shutter 1. Background CMOS Image sensors with a global shutter (GS) are ideal for a variety of applications including factory automation, unmanned
Measurement of Pedestrian Groups Using Subtraction Stereo
 Measurement of Pedestrian Groups Using Subtraction Stereo Kenji Terabayashi, Yuki Hashimoto, and Kazunori Umeda Chuo University / CREST, JST, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan terabayashi@mech.chuo-u.ac.jp
Measurement of Pedestrian Groups Using Subtraction Stereo Kenji Terabayashi, Yuki Hashimoto, and Kazunori Umeda Chuo University / CREST, JST, 1-13-27 Kasuga, Bunkyo-ku, Tokyo 112-8551, Japan terabayashi@mech.chuo-u.ac.jp
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
: Easy 3D Calibration of laser triangulation systems. Fredrik Nilsson Product Manager, SICK, BU Vision
 : Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
: Easy 3D Calibration of laser triangulation systems Fredrik Nilsson Product Manager, SICK, BU Vision Using 3D for Machine Vision solutions : 3D imaging is becoming more important and well accepted for
3DPIXA Stereo line scan cameras for ultra-high resolution 3D applications
 3DPIXA Stereo line scan cameras for ultra-high resolution 3D applications Content Company overview 3DPIXA stereo cameras 3DPIXA HR high resolution stereo cameras Advantages: stereo with line scan 3DPIXA
3DPIXA Stereo line scan cameras for ultra-high resolution 3D applications Content Company overview 3DPIXA stereo cameras 3DPIXA HR high resolution stereo cameras Advantages: stereo with line scan 3DPIXA
Highlights. Main Features. Product Images: Mini Trooper 2-Camera Wire-Free Video Security System
 Mini Trooper 2-Camera Wire-Free Video Security System 2 HD Wire-Free Indoor/Outdoor Cameras with Base Station and 8GB MicroSD Highlights Weatherproof with absolutely no wires so you can place it anywhere
Mini Trooper 2-Camera Wire-Free Video Security System 2 HD Wire-Free Indoor/Outdoor Cameras with Base Station and 8GB MicroSD Highlights Weatherproof with absolutely no wires so you can place it anywhere
FLEXPOINT Laser Modules. Laser Modules For Your Application. laser-components.com
 FLEXPOINT Laser Modules Laser Modules For Your Application laser-components.com Get in Contact LASER COMPONENTS USA, Inc. 116 South River Road, Building C Bedford, NH 03110 / USA www.laser-components.com
FLEXPOINT Laser Modules Laser Modules For Your Application laser-components.com Get in Contact LASER COMPONENTS USA, Inc. 116 South River Road, Building C Bedford, NH 03110 / USA www.laser-components.com
Tyzx DeepSea High Speed Stereo Vision System
 Tyzx DeepSea High Speed Stereo Vision System John Iselin Woodfill, Gaile Gordon, Ron Buck Tyzx, Inc. 3885 Bohannon Drive Menlo Park, CA 9425 {Woodfill, Gaile, Ron}@tyzx.com Abstract This paper describes
Tyzx DeepSea High Speed Stereo Vision System John Iselin Woodfill, Gaile Gordon, Ron Buck Tyzx, Inc. 3885 Bohannon Drive Menlo Park, CA 9425 {Woodfill, Gaile, Ron}@tyzx.com Abstract This paper describes
On-line and Off-line 3D Reconstruction for Crisis Management Applications
 On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
On-line and Off-line 3D Reconstruction for Crisis Management Applications Geert De Cubber Royal Military Academy, Department of Mechanical Engineering (MSTA) Av. de la Renaissance 30, 1000 Brussels geert.de.cubber@rma.ac.be
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
10/5/09 1. d = 2. Range Sensors (time of flight) (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.
 (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.") Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
20 MHz/16-bit readout 61 fps rate at full-frame resolution. Use ROI/binning for hundreds of frames per second.
 ProEM -HS: 512BX3 The ProEM -HS: 512BX3 is the most advanced EMCCD camera on the market. It features Princeton Instruments patented excelon 3 technology which delivers the best combination of sensitivity,
ProEM -HS: 512BX3 The ProEM -HS: 512BX3 is the most advanced EMCCD camera on the market. It features Princeton Instruments patented excelon 3 technology which delivers the best combination of sensitivity,
PRODUCT INFORMATION. Visionary-T 3D SNAPSHOT WIDE RANGE OF APPLICATIONS FOR INDOOR USE. 3D vision
 PRODUCT INFORMATION Visionary-T 3D SNAPSHOT WIDE RANGE OF APPLICATIONS FOR INDOOR USE 3D vision FULL FLEXIBILITY FOR INDOOR USE The streaming cameras in the Visionary-T 3D vision product family deliver
PRODUCT INFORMATION Visionary-T 3D SNAPSHOT WIDE RANGE OF APPLICATIONS FOR INDOOR USE 3D vision FULL FLEXIBILITY FOR INDOOR USE The streaming cameras in the Visionary-T 3D vision product family deliver
Setting the Test Standard for Tomorrow. Nasdaq: AEHR
 Setting the Test Standard for Tomorrow Nasdaq: AEHR Forward Looking Statements This presentation contains forward-looking statements that involve risks and uncertainties relating to projections regarding
Setting the Test Standard for Tomorrow Nasdaq: AEHR Forward Looking Statements This presentation contains forward-looking statements that involve risks and uncertainties relating to projections regarding
arxiv: v1 [cs.cv] 21 Sep 2018
![arxiv: v1 [cs.cv] 21 Sep 2018](/thumbs/95/123573666.jpg "arxiv: v1 [cs.cv] 21 Sep 2018") arxiv:1809.07977v1 [cs.cv] 21 Sep 2018 Real-Time Stereo Vision on FPGAs with SceneScan Konstantin Schauwecker 1 Nerian Vision GmbH, Gutenbergstr. 77a, 70197 Stuttgart, Germany www.nerian.com Abstract We
arxiv:1809.07977v1 [cs.cv] 21 Sep 2018 Real-Time Stereo Vision on FPGAs with SceneScan Konstantin Schauwecker 1 Nerian Vision GmbH, Gutenbergstr. 77a, 70197 Stuttgart, Germany www.nerian.com Abstract We
OPTOELECTRONICS SENSORIC
 OPTOELECTRONICS SENSORIC Chip Scale Package Monolithic Structure CCD and CMOS Technology on a single Chip ESPROS Photonics AG ESPROS Photonics AG offers a range of opto-electronical com-ponents for industrial
OPTOELECTRONICS SENSORIC Chip Scale Package Monolithic Structure CCD and CMOS Technology on a single Chip ESPROS Photonics AG ESPROS Photonics AG offers a range of opto-electronical com-ponents for industrial
A picture can say more than 1000 words comparing camera images. Jürgen Bretschneider, 2015
 A picture can say more than 1000 words comparing camera images Jürgen Bretschneider, 2015 Allied Vision Profile Foundation: 1989, Headquarters: Stadtroda (Germany) Employees: > 300 (2015) Know how: Development
A picture can say more than 1000 words comparing camera images Jürgen Bretschneider, 2015 Allied Vision Profile Foundation: 1989, Headquarters: Stadtroda (Germany) Employees: > 300 (2015) Know how: Development
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.2: Visual Odometry Jürgen Sturm Technische Universität München Cascaded Control Robot Trajectory 0.1 Hz Visual
2 Depth Camera Assessment
 2 Depth Camera Assessment The driving question of this chapter is how competitive cheap consumer depth cameras, namely the Microsoft Kinect and the SoftKinetic DepthSense, are compared to state-of-the-art
2 Depth Camera Assessment The driving question of this chapter is how competitive cheap consumer depth cameras, namely the Microsoft Kinect and the SoftKinetic DepthSense, are compared to state-of-the-art
Omni Stereo Vision of Cooperative Mobile Robots
 Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Omni Stereo Vision of Cooperative Mobile Robots Zhigang Zhu*, Jizhong Xiao** *Department of Computer Science **Department of Electrical Engineering The City College of the City University of New York (CUNY)
Machine Vision: A Closer Look
 Machine Vision: A Closer Look Kambiz Nayebi Kim Bowling 1 Components of Machine Vision Optics: Maps the 3 D world size objects onto the small sensor Lens Protective glass window Sensor: Converts the projection
Machine Vision: A Closer Look Kambiz Nayebi Kim Bowling 1 Components of Machine Vision Optics: Maps the 3 D world size objects onto the small sensor Lens Protective glass window Sensor: Converts the projection
XCL-SG Series. XCL-CG Series. Digital Camera Module Equipped with the Global Shutter CMOS Sensor
 Digital Camera Module Equipped with the Global Shutter CMOS Sensor XCL-SG Series XCL-CG Series (B/W) C (Colour) 1.1-type 12.4 MP 20 fps Camera Link Key Features Camera Link Base Configuration (1/2/3 tap
Digital Camera Module Equipped with the Global Shutter CMOS Sensor XCL-SG Series XCL-CG Series (B/W) C (Colour) 1.1-type 12.4 MP 20 fps Camera Link Key Features Camera Link Base Configuration (1/2/3 tap
Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight
 Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight Kirill E. Shilov 1, Vladimir V. Afanasyev 2 and Pavel A. Samsonov 3 1 Moscow Institute of Physics and Technology (MIPT),
Vision-Based Navigation Solution for Autonomous Indoor Obstacle Avoidance Flight Kirill E. Shilov 1, Vladimir V. Afanasyev 2 and Pavel A. Samsonov 3 1 Moscow Institute of Physics and Technology (MIPT),
Fast 3D imagers for movement detection
 Fast 3D imagers for movement detection Automotive safety Autonomous vehicles Claude FLORIN CEO Lucio CARRARA CTO Grenoble, 25.10.2016 claude@fastree3d.com +41 79 866 1000 R & D p a r t n e r s Automotive
Fast 3D imagers for movement detection Automotive safety Autonomous vehicles Claude FLORIN CEO Lucio CARRARA CTO Grenoble, 25.10.2016 claude@fastree3d.com +41 79 866 1000 R & D p a r t n e r s Automotive
CMOS sensors are coming at age
 CMOS sensors are coming at age Michael Sehested Lund Nov 2015 JAI Is a camera manufacturer with global presence and operates via own sites and distribution in more than 40 countries Copenhagen (HQ) San
CMOS sensors are coming at age Michael Sehested Lund Nov 2015 JAI Is a camera manufacturer with global presence and operates via own sites and distribution in more than 40 countries Copenhagen (HQ) San
2018 PRODUCT ROADMAP Q 4 Q 3 Q 2 Q 1. Marine Cam. Depth Camera. Automotive Optics. MILESTONES OF LEtC
 2 3 MILESTONES OF LEtC 2018 Set up optics and lighting design subsidiary in Los Angeles, United States of America. Will set up J. V. optics and lighting design company in HCM city, Vietnam. Will set up
2 3 MILESTONES OF LEtC 2018 Set up optics and lighting design subsidiary in Los Angeles, United States of America. Will set up J. V. optics and lighting design company in HCM city, Vietnam. Will set up
Phase One ixa-r Camera. Fully Integrated Aerial Photography Solutions
 Phase One ixa-r Camera Fully Integrated Aerial Photography Solutions Phase One ixa-r Camera System The Phase One ixa-r aerial camera system is an integrated medium format camera system that was designed
Phase One ixa-r Camera Fully Integrated Aerial Photography Solutions Phase One ixa-r Camera System The Phase One ixa-r aerial camera system is an integrated medium format camera system that was designed
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
product pco.edge family overview the most versatile scmos camera portfolio on the market pioneer in scmos image sensor technology
 pco.edge family product overview the most versatile scmos camera portfolio on the market pioneer in scmos image sensor technology corporate profile PCO is a leading specialist for digital imaging devices
pco.edge family product overview the most versatile scmos camera portfolio on the market pioneer in scmos image sensor technology corporate profile PCO is a leading specialist for digital imaging devices
Science & Technology Group
 Cannock Chase U3A Science & Technology Group Programme June 12 th PC fundamentals 1: July 17th Camera fundamentals 1 August Tablet PC fundamentals 1 September PC applications 2 (Word, Excel, Music, Photos,
Cannock Chase U3A Science & Technology Group Programme June 12 th PC fundamentals 1: July 17th Camera fundamentals 1 August Tablet PC fundamentals 1 September PC applications 2 (Word, Excel, Music, Photos,
Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography
 Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Mitsubishi Electric Research Labs (MERL) Computational Cameras Computational Cameras: Exploiting Spatial- Angular Temporal Tradeoffs in Photography Amit Agrawal Mitsubishi Electric Research Labs (MERL)
Real-time Image Stabilization for ToF Cameras on Mobile Platforms
 Real-time Image Stabilization for ToF Cameras on Mobile Platforms Benjamin Langmann, Klaus Hartmann, and Otmar Loffeld Center for Sensor Systems (ZESS), University of Siegen, Paul-Bonatz-Str. 9-, 8 Siegen,
Real-time Image Stabilization for ToF Cameras on Mobile Platforms Benjamin Langmann, Klaus Hartmann, and Otmar Loffeld Center for Sensor Systems (ZESS), University of Siegen, Paul-Bonatz-Str. 9-, 8 Siegen,
P H A S E O N E I N D U S T R I A L. T h e w o r l d l e a d e r i n h i g h r e s o l u t i o n i m a g i n g
 P H A S E O N E I N D U S T R I A L T h e w o r l d l e a d e r i n h i g h r e s o l u t i o n i m a g i n g 1 WE ARE A WORLD LEADING PROVIDER of medium format digital imaging systems and solutions for
P H A S E O N E I N D U S T R I A L T h e w o r l d l e a d e r i n h i g h r e s o l u t i o n i m a g i n g 1 WE ARE A WORLD LEADING PROVIDER of medium format digital imaging systems and solutions for
Wide Area 2D/3D Imaging
 Wide Area 2D/3D Imaging Benjamin Langmann Wide Area 2D/3D Imaging Development, Analysis and Applications Benjamin Langmann Hannover, Germany Also PhD Thesis, University of Siegen, 2013 ISBN 978-3-658-06456-3
Wide Area 2D/3D Imaging Benjamin Langmann Wide Area 2D/3D Imaging Development, Analysis and Applications Benjamin Langmann Hannover, Germany Also PhD Thesis, University of Siegen, 2013 ISBN 978-3-658-06456-3
H2020 Space Robotic SRC- OG4
 H2020 Space Robotic SRC- OG4 CCT/COMET ORB Workshop on Space Rendezvous 05/12/2017 «Smart Sensors for Smart Missions» Contacts: Sabrina Andiappane, sabrina.andiappane@thalesaleniaspace.com Vincent Dubanchet,
H2020 Space Robotic SRC- OG4 CCT/COMET ORB Workshop on Space Rendezvous 05/12/2017 «Smart Sensors for Smart Missions» Contacts: Sabrina Andiappane, sabrina.andiappane@thalesaleniaspace.com Vincent Dubanchet,
Dashcams and IP-Security Cams
 Dashcams and IP-Security Cams Rollei Security Cam Mini Video Camera for remote ing with 110 wide angle lens With WiFi connection and web server for data transfer Rollei Video 720p With motion and e-mail
Dashcams and IP-Security Cams Rollei Security Cam Mini Video Camera for remote ing with 110 wide angle lens With WiFi connection and web server for data transfer Rollei Video 720p With motion and e-mail
Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors
 Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors Sriram Sethuraman Technologist & DMTS, Ittiam 1 Overview Imaging on Smart-phones
Advanced Imaging Applications on Smart-phones Convergence of General-purpose computing, Graphics acceleration, and Sensors Sriram Sethuraman Technologist & DMTS, Ittiam 1 Overview Imaging on Smart-phones
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
New Technologies for UAV/UGV
 Qualcomm Research New Technologies for UAV/UGV Charles Bergan VP, Engineering Qualcomm Research Qualcomm Technologies, Inc. 2013-2016 QUALCOMM Incorporated and/or its subsidiaries. All rights reserved
Qualcomm Research New Technologies for UAV/UGV Charles Bergan VP, Engineering Qualcomm Research Qualcomm Technologies, Inc. 2013-2016 QUALCOMM Incorporated and/or its subsidiaries. All rights reserved
3DPIXA: options and challenges with wirebond inspection. Whitepaper
 3DPIXA: options and challenges with wirebond inspection Whitepaper Version Author(s) Date R01 Timo Eckhard, Maximilian Klammer 06.09.2017 R02 Timo Eckhard 18.10.2017 Executive Summary: Wirebond inspection
3DPIXA: options and challenges with wirebond inspection Whitepaper Version Author(s) Date R01 Timo Eckhard, Maximilian Klammer 06.09.2017 R02 Timo Eckhard 18.10.2017 Executive Summary: Wirebond inspection
PART IV: RS & the Kinect
 Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
Computer Vision on Rolling Shutter Cameras PART IV: RS & the Kinect Per-Erik Forssén, Erik Ringaby, Johan Hedborg Computer Vision Laboratory Dept. of Electrical Engineering Linköping University Tutorial
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Stereo Vision A simple system. Dr. Gerhard Roth Winter 2012
 Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
Stereo Vision A simple system Dr. Gerhard Roth Winter 2012 Stereo Stereo Ability to infer information on the 3-D structure and distance of a scene from two or more images taken from different viewpoints
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Features. Applications
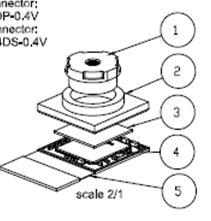
 DATASHEET epc635 Card Edge Connector Carrier 3D TOF imager epc635 160 x 60 pixel on mounting carrier General Description The epc635 Card Edge Connector Carrier is an easy-to-use board with an epc635 chip
DATASHEET epc635 Card Edge Connector Carrier 3D TOF imager epc635 160 x 60 pixel on mounting carrier General Description The epc635 Card Edge Connector Carrier is an easy-to-use board with an epc635 chip
Optilia Instruments. Empowering Your Vision!
 Optilia Instruments Empowering Your Vision! Product Review: High Definition Inspection Cameras New technology to replace microscope based inspection tasks! RevB, November-2013 Advantages over Traditional
Optilia Instruments Empowering Your Vision! Product Review: High Definition Inspection Cameras New technology to replace microscope based inspection tasks! RevB, November-2013 Advantages over Traditional