Position and Orientation Control of Robot Manipulators Using Dual Quaternion Feedback
|
|
|
- Harry Garrison
- 5 years ago
- Views:
Transcription
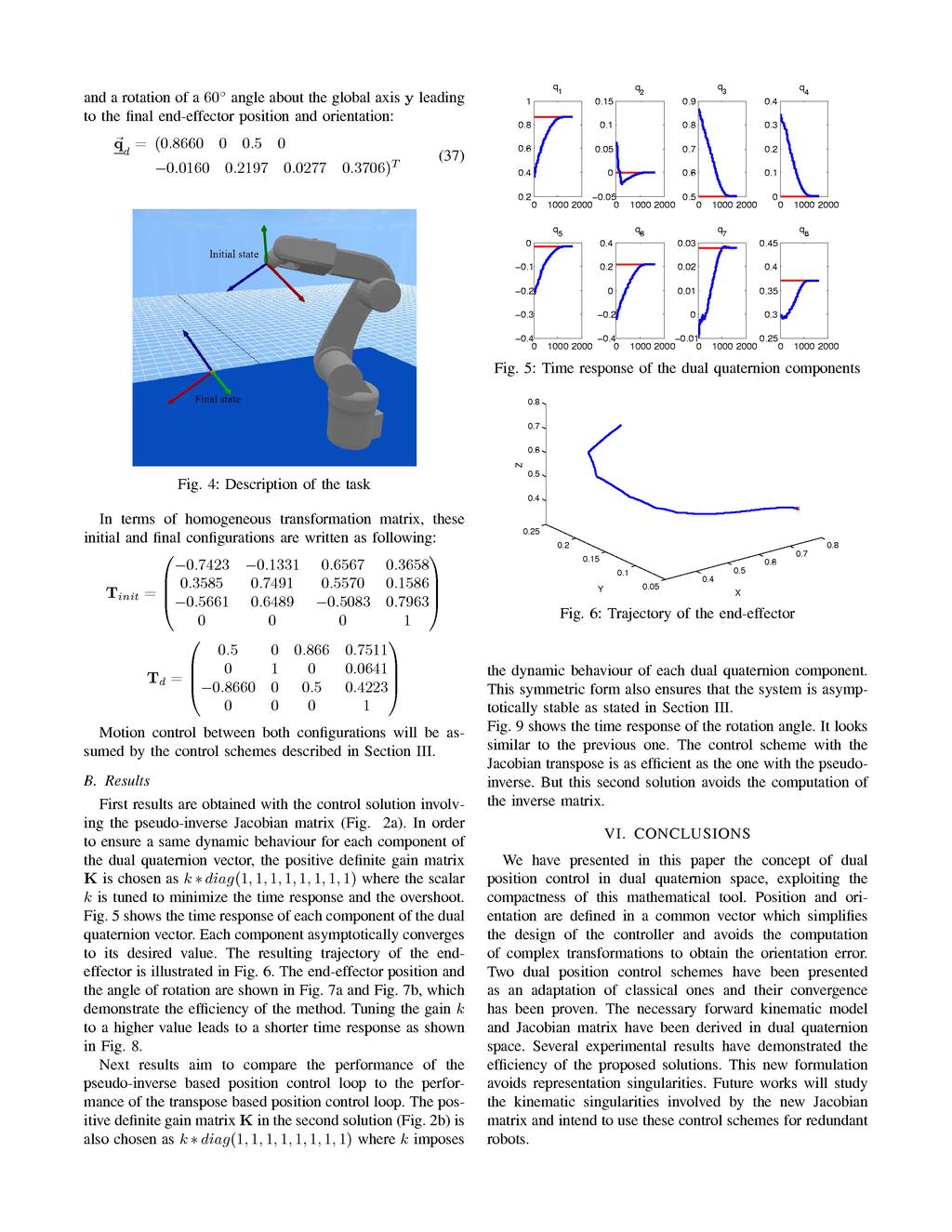
1 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Position and Orientation Control of Robot Manipulators Using Dual Quaternion Feedback Hoang-Lan Pham, Véronique Perdereau, Bruno Vilhena Adorno and Philippe Fraisse UPMC Univ Paris 06, UMR 7222, F-75005, Paris, FRANCE Université Montpellier II, UMR 5506, LIRMM, Montpellier, FRANCE Abstract We propose in this paper a new concept of unified position/orientation control of robot manipulator by describing the end-effector motion as a dual quaternion involving both translation and rotation. The development of the forward kinematic model and Jacobian matrix in dual quaternion space is detailed as well as the stability of the controller. At last, simulation and experimental results highlight the efficiency and performance of this controller. I. INTRODUCTION Many robotic applications involve not only pick and place operations but also grasping and fine manipulation of any kind of objects. The task is then described by means of endeffector motion which should be efficiently controlled. In the case of a robot manipulator, the gripper or possibly the hand attached to the end-effector can be viewed as an actuator manoeuvring the position and the orientation of the object. As a result, the desired task can be described by a desired position and orientation of the coordinate frame attached to the robot end-effector with respect to the base frame (i.e. the task-space variables). Control of the end-effector motion is commonly performed using feedback of either the joint variables or the task-space variables. The joint-based control requires the solution of the inverse kinematics to convert the desired task-space trajectory into the desired joint trajectory, but the inverse model is often difficult to obtain. In contrast, task-space control does not need the inverse kinematics. However, the precise and stable control of the end-effector position and orientation must be ensured. The position and orientation can be parametrized in different ways, such as with the well-known 4 4 homogeneous transformation matrix, Euler angles [6], unit quaternion [9], [10] or dual quaternion [3], [8]. In an homogeneous transformation matrix, twelve parameters are used to represent the position and orientation of a body. When the unit quaternion is adopted for the rotation, a seven-dimensional vector must be defined. Only the Euler angles and any kind of threeelement orientation vectors can provide a six-dimensional vector as a unified representation of position and orientation. But a 4 4 matrix is still to be used for deriving the forward kinematics and extracting the unit quaternion or the Euler angles. Moreover, all types of Euler angles have a "rotation-insequence" nature. Thus, the Euler angle method is suitable for representing a single frame orientation but not for representing orientation paths in the case of trajectory tracking. Another critical issue for the Euler angles is that they suffer from representation singularities. The unit quaternion represents the end-effector orientation without singularities but complicates the controller design since the position and orientation errors are separately calculated [9], [10]. Indeed, position control schemes are usually made of two control loops, for controlling the rotation and the translation, respectively [7]. The angular velocity is typically obtained through the approximate differentiation of some orientation representation, provided that it is differentiable. Despite the eight-dimension of the dual quaternion, some authors [1], [4] stated that the dual quaternion is the most compact and efficient way to express the screw motion, that is, both translational and rotational transformations in a robot kinematic chain. The dual quaternion turns out to be an elegant and useful tool for kinematic analysis in many researches such as in inertial navigation [8] and computer vision [3]. In this paper, we use the dual quaternion as the basis for a position control scheme of a manipulator robot. The error between desired and actual position/orientation is simply expressed as a difference between both corresponding dual quaternions, which widely facilitates the error computation in comparison with classical methods. Considering main position control strategies [7], we have built two different control schemes - with pseudo-inverse Jacobian and Jacobian transpose, respectively - allowing position and orientation control in only one control loop, hereafter called dual position control strategy. The global asymptotic stability is proven for each. In order to test the validity of the computation methods and to evaluate the efficiency of the control strategies, a 6-axis Adept Viper robot is used in simulated and real conditions. This paper is organized as follows: Section II presents the mathematical background that will be useful for the remaining of the paper. Two methods for dual position control are proposed in Section III. Section IV describe a systematic way for finding the forward kinematic model and the Jacobian matrix in the dual quaternion space. Then, to validate our technique based on dual quaternions, a variety of experiments with computer simulations and a real robot are carried out and reported in Section V. Finally, Section VI presents the conclusions and proposes future works /10/$ IEEE 658
2 659
3 Therefore, the unit dual quaternion is a useful tool to represent the transformation between two frames F 1 and F 2 resulting from either a rotation q succeeded by a translation t 2 with respect to F 2, that is, q = q+ε 1 2 qt 2 (18) or a translation t 1 with respect to F 1 succeeded by a rotation q, i.e., q = q+ε 1 2 t 1q (19) III. DUAL POSITION CONTROL SCHEME Since a dual quaternion is a compact representation for the position and the orientation, we can easily define the desired position and orientation of the robot end-effector with respect to the base frame by a unit dual quaternion as follows: q d = ( q d q d) T (20) where the unit quaternion q d represents the desired orientation and the quaternion q d representing the desired translation is calculated according to (19). When using joint based position controllers, a natural metric for the error calculation arises as being the vector difference between the desired input vector θ d and the measured vector θ. And the aim of the position control loop is to make this error converge to zero. For this to happen, two different position control schemes are commonly used, based on the pseudo-inverse Jacobian matrix in one hand and on the Jacobian transpose matrix in another hand [7]. Let us consider the dual quaternion error q e as being the difference between the desired and the actual dual quaternions: q e = q d q (21) The aim of the dual position control loop presented in this paper is to make this dual quaternion error converge to zero. This dual quaternion error q e turns out to be an arbitrary vector in a R 8 manifold. Although this vector does not satisfy the constraints of (16), it can be used as a metric for the error in a joint based position scheme provided that an appropriate analytical Jacobian matrix J A (q) is derived in the dual quaternion space of the manipulator, relating the joint velocity vector θ and the time derivative of the dual quaternion as: q = J A (q) θ (22) The usual position control schemes are modified accordingly to (22) and are represented in Fig. 2a and Fig. 2b, respectively. Let us prove in the following that both solutions ensure the convergence of the dual quaternion error to zero. The time derivation of (21) q e = q d q (23) + K - FKM Robot (a) Dual position control scheme using the Jacobian pseudo-inverse + K leads to - FKM Robot (b) Dual position control scheme using the Jacobian transpose Fig. 2: Dual position control strategies. q e = J A (q) θ (24) when the reference q d is constant. In the case of the pseudoinverse Jacobian scheme (Fig. 2a), the choice θ = J + A K q e leads to the equivalent linear system q e +K q e = 0 (25) If K is a positive definite (usually diagonal) matrix, the error tends to zero with a convergence rate that depends on the eigenvalues of matrix K; the larger are the eigenvalues, the faster is the convergence. The system is asymptotically stable. In the case of the Jacobian transpose scheme (Fig. 2b), let us choose as Lyapunov candidate the positive definite quadratic function: V( q e ) = 1 2 qt e K q e where K is assumed to be a symmetric matrix. Differentiating (26) with respect to time gives: (26) V = 1 2 q T e K q e qt e K q e (27) = 1 θ T J T (24) 2 AK q e 1 2 qt KJ e A θ (28) Since K is a symmetric matrix, the choice θ = J T A K q e leads to V = q T e KJ AJ T AK q e (29) If K is positive definite, the derivative of the Lyapunov function obtained in (29) is negative. Hence, the system is asymptotically stable. Both control schemes ensure stable control of the endeffector motion proving that the task can efficiently be described in terms of dual quaternions, which greatly simplifies the implementation of the controller since position and orientation are no more separately controlled. The position/orientation error is expressed in a unified and compact vector which avoids singularities related to the representation of the orientation. 660

4 IV. ROBOT KINEMATICS IN DUAL QUATERNION SPACE This section details the computation of the forward kinematic model (FKM) and of the Jacobian matrix in the dual quaternion space that are required in both control schemes. A. Forward kinematic model in dual quaternion space To derive the forward kinematic model (FKM) of a serial link manipulator, the standard Denavit-Hartenberg convention [6] has widely been used. Having assigned coordinate frames to each link, the transformation between two successive frames F n 1 and F n is described with the following rotations and translations: 1) Rotation about axis z n 1 of an angle θ n : Rot(z n 1,θ n ) 2) Translation along axis z n 1 of a distance d n : Trans(z n 1,d n ) 3) Translation along axis x n of a distance a n : Trans(x n,a n ) 4) Rotation about axis x n of an angle α n : Rot(x n,α n ) Similarly, in the dual quaternion space, the transformation between these frames is obtained by multiplication of the 4 dual quaternions corresponding to each transformation: q n 1,n = q rot (z n 1,θ n )q trans (z n 1,d n )q trans (x n,a n )q rot (x n,α n ) (30) The subscripts rot and trans indicate whether the transformation is a pure rotation or a pure translation, respectively. In these cases, the dual quaternions are simplified. For a pure rotation, the translation vector is 0 and thus q rot = q rot. For a pure translation, the rotation quaternion is the identity and hence q trans = 1+ε t 2. The FKM can be then calculated for an n-link robot as: q 1 q J(q) = d q dθ = d. 1 q 1... q 4 θ 1 θ n dθ q 5 = q 8 q (35) θ 1 θ n q 8 where q = [q 1,q 2,q 3,q 4 ] T and q = [q 5,q 6,q 7,q 8 ] T, with q and q being the components of the dual quaternion q = q+εq. V. EXPERIMENTS To validate the dual position control approach proposed and presented in Section III, we have implemented both control schemes (Fig. 2a and Fig. 2b) on a six-link manipulator. To this aim, we have derived for this Adept Viper robot (Fig. 3) the forward kinematic model in the dual quaternion space and the corresponding Jacobian matrix using (31) and (35). q = q 01 q 12...q n 1,n (31) B. Jacobian matrix in the dual quaternion space For any robot manipulator with n joints, the kinematic expression that relates the end-effector velocity vector Ẋ to the joint velocity vector θ is given by the well-known relationship [6]: X = J(θ) θ (32) where the Jacobian matrix J(θ) is given analytically by J(θ) = d X d θ In the dual quaternion space, (32) becomes (33) q = J(q) θ (34) Now the Jacobian matrix relating the joint velocity vector θ and the time derivative of the dual quaternion q is given analytically by A. Chosen task Fig. 3: Adept Viper s850 robot We have conducted a variety of experiments in simulated and real conditions, and in all of them the proposed approaches achieved an efficient performance. As initial configuration, we consider all joint positions equal to θ init = ( ) T. This configuration corresponds to the following vector in the dual quaternion space: q init = ( ) T (36) The task consists of moving the robot s end-effector so that the tool frame coincides with the desired frame, as illustrated in Fig. 4. This movement combines a translation 661
5 662
6 140 Times response of the angle of rotation 0.8 X position 0.2 Y position 0.8 Z position 130 (m) (m) (m) (a) Time response of the end-effector position components angle (degree) Fig. 9: Time response of the angle of rotation for the dual position control using the transpose Jacobian matrix angle of rotation VII. ACKNOWLEDGMENT This work is supported by Agence Nationale de la Recherche (ANR) under grant ANR 07-ROBO-011 in the context of the ASSIST project. angle (degree) (b) Time response of the angle of rotation Fig. 7: Dual position control using the pseudo-inverse Jacobian matrix angle (degree) Times response of the angle of rotation desired angle K=2 K=0.7 REFERENCES [1] N.A. Aspragathos and J.K. Dimitros. A comparative study of three methods for robot kinematics. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 28(2): , Apr [2] Clifford. Preliminary sketch of biquaternions. In Oxford Journals, editor, Proceedings London Mathematical Society, 1-4, pages , [3] Konstantinos Daniilidis. Hand-eye calibration using dual quaternions. The International Journal of Robotics Research, 18: , [4] J. Funda, R.H. Taylor, and R.P. Paul. On homogeneous transforms, quaternions, and computational efficiency. Robotics and Automation, IEEE Transactions on, 6(3): , Jun [5] Jack B. Kuipers. Quaternions and Rotation Sequences: A Primer with Applications to Orbits, Aerospace and Virtual Reality [6] Richard P. Paul. Robot Manipulators: Mathematics, Programming, and Control. MIT Press, Cambridge, MA, USA, [7] Bruno Siciliano, Lorenzo Sciavicco, Luigi Villani, and Giuseppe Oriolo. Robotics: Modelling, Planning and Control (Advanced Textbooks in Control and Signal Processing). Springer, [8] Yuanwin Wu, Xiaoping Hu, Dewen Hu, Tao Li, and Junwiang Lian. Strapdown inertial navigation system algorithms based on dual quaternions. IEEE transactions on aerospace and electronic systems, 41(1): , [9] B. Xian, M.S. de Queiroz, D. Dawson, and I. Walker. Task-space tracking control of robot manipulators via quaternion feedback. Robotics and Automation, IEEE Transactions on, 20(1): , [10] J.S. Yuan. Closed-loop manipulator control using quaternion feedback. IEEE Journal of Robotics and Automation, 4(4): , Aug Fig. 8: Time response of the angle of rotation with different values of K when using the pseudo-inverse Jacobian matrix 663
Position and Orientation Control of Robot Manipulators Using Dual Quaternion Feedback
 Position and Orientation Control of Robot Manipulators Using Dual Quaternion Feedback Hoang-Lan Pham, Véronique Perdereau, Bruno Vilhena Adorno and Philippe Fraisse UPMC Univ Paris 6, UMR 7222, F-755,
Position and Orientation Control of Robot Manipulators Using Dual Quaternion Feedback Hoang-Lan Pham, Véronique Perdereau, Bruno Vilhena Adorno and Philippe Fraisse UPMC Univ Paris 6, UMR 7222, F-755,
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Solution of inverse kinematic problem for serial robot using dual quaterninons and plucker coordinates
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2009 Solution of inverse kinematic problem for
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2009 Solution of inverse kinematic problem for
Robotics I. March 27, 2018
 Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
Robotics I March 27, 28 Exercise Consider the 5-dof spatial robot in Fig., having the third and fifth joints of the prismatic type while the others are revolute. z O x Figure : A 5-dof robot, with a RRPRP
SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK
 ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
ABCM Symposium Series in Mechatronics - Vol. 3 - pp.276-285 Copyright c 2008 by ABCM SCREW-BASED RELATIVE JACOBIAN FOR MANIPULATORS COOPERATING IN A TASK Luiz Ribeiro, ribeiro@ime.eb.br Raul Guenther,
Chapter 2 Kinematics of Mechanisms
 Chapter Kinematics of Mechanisms.1 Preamble Robot kinematics is the study of the motion (kinematics) of robotic mechanisms. In a kinematic analysis, the position, velocity, and acceleration of all the
Chapter Kinematics of Mechanisms.1 Preamble Robot kinematics is the study of the motion (kinematics) of robotic mechanisms. In a kinematic analysis, the position, velocity, and acceleration of all the
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS
 DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
DIMENSIONAL SYNTHESIS OF SPATIAL RR ROBOTS ALBA PEREZ Robotics and Automation Laboratory University of California, Irvine Irvine, CA 9697 email: maperez@uci.edu AND J. MICHAEL MCCARTHY Department of Mechanical
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
A New Algorithm for Measuring and Optimizing the Manipulability Index
 DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
DOI 10.1007/s10846-009-9388-9 A New Algorithm for Measuring and Optimizing the Manipulability Index Ayssam Yehia Elkady Mohammed Mohammed Tarek Sobh Received: 16 September 2009 / Accepted: 27 October 2009
Inverse Kinematics of 6 DOF Serial Manipulator. Robotics. Inverse Kinematics of 6 DOF Serial Manipulator
 Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Inverse Kinematics of 6 DOF Serial Manipulator Robotics Inverse Kinematics of 6 DOF Serial Manipulator Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics
Singularity Handling on Puma in Operational Space Formulation
 Singularity Handling on Puma in Operational Space Formulation Denny Oetomo, Marcelo Ang Jr. National University of Singapore Singapore d oetomo@yahoo.com mpeangh@nus.edu.sg Ser Yong Lim Gintic Institute
Singularity Handling on Puma in Operational Space Formulation Denny Oetomo, Marcelo Ang Jr. National University of Singapore Singapore d oetomo@yahoo.com mpeangh@nus.edu.sg Ser Yong Lim Gintic Institute
A New Algorithm for Measuring and Optimizing the Manipulability Index
 A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
A New Algorithm for Measuring and Optimizing the Manipulability Index Mohammed Mohammed, Ayssam Elkady and Tarek Sobh School of Engineering, University of Bridgeport, USA. Mohammem@bridgeport.edu Abstract:
Forward kinematics and Denavit Hartenburg convention
 Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Forward kinematics and Denavit Hartenburg convention Prof. Enver Tatlicioglu Department of Electrical & Electronics Engineering Izmir Institute of Technology Chapter 5 Dr. Tatlicioglu (EEE@IYTE) EE463
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination
 1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination Iwona Pajak 1, Grzegorz Pajak 2 University of Zielona Gora, Faculty of Mechanical Engineering,
1724. Mobile manipulators collision-free trajectory planning with regard to end-effector vibrations elimination Iwona Pajak 1, Grzegorz Pajak 2 University of Zielona Gora, Faculty of Mechanical Engineering,
An Efficient Method for Solving the Direct Kinematics of Parallel Manipulators Following a Trajectory
 An Efficient Method for Solving the Direct Kinematics of Parallel Manipulators Following a Trajectory Roshdy Foaad Abo-Shanab Kafr Elsheikh University/Department of Mechanical Engineering, Kafr Elsheikh,
An Efficient Method for Solving the Direct Kinematics of Parallel Manipulators Following a Trajectory Roshdy Foaad Abo-Shanab Kafr Elsheikh University/Department of Mechanical Engineering, Kafr Elsheikh,
Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators
 Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators 5 Tuna Balkan, M. Kemal Özgören and M. A. Sahir Arıkan Open Access Database www.i-techonline.com 1. Introduction
Structure Based Classification and Kinematic Analysis of Six-Joint Industrial Robotic Manipulators 5 Tuna Balkan, M. Kemal Özgören and M. A. Sahir Arıkan Open Access Database www.i-techonline.com 1. Introduction
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
1498. End-effector vibrations reduction in trajectory tracking for mobile manipulator
 1498. End-effector vibrations reduction in trajectory tracking for mobile manipulator G. Pajak University of Zielona Gora, Faculty of Mechanical Engineering, Zielona Góra, Poland E-mail: g.pajak@iizp.uz.zgora.pl
1498. End-effector vibrations reduction in trajectory tracking for mobile manipulator G. Pajak University of Zielona Gora, Faculty of Mechanical Engineering, Zielona Góra, Poland E-mail: g.pajak@iizp.uz.zgora.pl
Design & Kinematic Analysis of an Articulated Robotic Manipulator
 Design & Kinematic Analysis of an Articulated Robotic Manipulator Elias Eliot 1, B.B.V.L. Deepak 1*, D.R. Parhi 2, and J. Srinivas 2 1 Department of Industrial Design, National Institute of Technology-Rourkela
Design & Kinematic Analysis of an Articulated Robotic Manipulator Elias Eliot 1, B.B.V.L. Deepak 1*, D.R. Parhi 2, and J. Srinivas 2 1 Department of Industrial Design, National Institute of Technology-Rourkela
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
6. Kinematics of Serial Chain Manipulators
 6. Kinematics of Serial Chain Manipulators 6.1 Assignment of reference frames In a multi-degree-of-freedom mechanical system consisting of rigid bodies, it is useful to attach reference frames to each
6. Kinematics of Serial Chain Manipulators 6.1 Assignment of reference frames In a multi-degree-of-freedom mechanical system consisting of rigid bodies, it is useful to attach reference frames to each
Table of Contents. Chapter 1. Modeling and Identification of Serial Robots... 1 Wisama KHALIL and Etienne DOMBRE
 Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Chapter 1. Modeling and Identification of Serial Robots.... 1 Wisama KHALIL and Etienne DOMBRE 1.1. Introduction... 1 1.2. Geometric modeling... 2 1.2.1. Geometric description... 2 1.2.2. Direct geometric
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
10. Cartesian Trajectory Planning for Robot Manipulators
 V. Kumar 0. Cartesian rajectory Planning for obot Manipulators 0.. Introduction Given a starting end effector position and orientation and a goal position and orientation we want to generate a smooth trajectory
V. Kumar 0. Cartesian rajectory Planning for obot Manipulators 0.. Introduction Given a starting end effector position and orientation and a goal position and orientation we want to generate a smooth trajectory
Serial Manipulator Statics. Robotics. Serial Manipulator Statics. Vladimír Smutný
 Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Serial Manipulator Statics Robotics Serial Manipulator Statics Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Automatic Control Industrial robotics
 Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
Automatic Control Industrial robotics Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Prof. Luca Bascetta Industrial robots
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS
 KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
KINEMATIC ANALYSIS OF 3 D.O.F OF SERIAL ROBOT FOR INDUSTRIAL APPLICATIONS Annamareddy Srikanth 1 M.Sravanth 2 V.Sreechand 3 K.Kishore Kumar 4 Iv/Iv B.Tech Students, Mechanical Department 123, Asst. Prof.
Cognitive Robotics
 04-801 Cognitive Robotics David Vernon Carnegie Mellon University Africa vernon@cmu.edu www.vernon.eu Cognitive Robotics 1 Carnegie Mellon University in Rwanda Lecture 11 Robot Arms II Example robot programming
04-801 Cognitive Robotics David Vernon Carnegie Mellon University Africa vernon@cmu.edu www.vernon.eu Cognitive Robotics 1 Carnegie Mellon University in Rwanda Lecture 11 Robot Arms II Example robot programming
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software
 Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
ISE 422/ME 478/ISE 522 Robotic Systems
 ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS
 A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
DETC APPROXIMATE MOTION SYNTHESIS OF SPHERICAL KINEMATIC CHAINS
 Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Proceedings of the ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2007 September 4-7, 2007, Las Vegas, Nevada, USA DETC2007-34372
Lecture 2: Kinematics of medical robotics
 ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
ME 328: Medical Robotics Autumn 2016 Lecture 2: Kinematics of medical robotics Allison Okamura Stanford University kinematics The study of movement The branch of classical mechanics that describes the
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Some algebraic geometry problems arising in the field of mechanism theory. J-P. Merlet INRIA, BP Sophia Antipolis Cedex France
 Some algebraic geometry problems arising in the field of mechanism theory J-P. Merlet INRIA, BP 93 06902 Sophia Antipolis Cedex France Abstract Mechanism theory has always been a favorite field of study
Some algebraic geometry problems arising in the field of mechanism theory J-P. Merlet INRIA, BP 93 06902 Sophia Antipolis Cedex France Abstract Mechanism theory has always been a favorite field of study
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Compare the testing methods for testing path segment and finding first
THE KINEMATIC DESIGN OF A 3-DOF HYBRID MANIPULATOR
 D. CHABLAT, P. WENGER, J. ANGELES* Institut de Recherche en Cybernétique de Nantes (IRCyN) 1, Rue de la Noë - BP 92101-44321 Nantes Cedex 3 - France Damien.Chablat@ircyn.ec-nantes.fr * McGill University,
D. CHABLAT, P. WENGER, J. ANGELES* Institut de Recherche en Cybernétique de Nantes (IRCyN) 1, Rue de la Noë - BP 92101-44321 Nantes Cedex 3 - France Damien.Chablat@ircyn.ec-nantes.fr * McGill University,
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Kinematic Model of Robot Manipulators
 Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Kinematic Model of Robot Manipulators Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism
 Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism Konstantin Kondak, Bhaskar Dasgupta, Günter Hommel Technische Universität Berlin, Institut für Technische Informatik
Design and Optimization of the Thigh for an Exoskeleton based on Parallel Mechanism Konstantin Kondak, Bhaskar Dasgupta, Günter Hommel Technische Universität Berlin, Institut für Technische Informatik
Inverse Kinematics of Robot Manipulators with Multiple Moving Control Points
 Inverse Kinematics of Robot Manipulators with Multiple Moving Control Points Agostino De Santis and Bruno Siciliano PRISMA Lab, Dipartimento di Informatica e Sistemistica, Università degli Studi di Napoli
Inverse Kinematics of Robot Manipulators with Multiple Moving Control Points Agostino De Santis and Bruno Siciliano PRISMA Lab, Dipartimento di Informatica e Sistemistica, Università degli Studi di Napoli
[9] D.E. Whitney, "Resolved Motion Rate Control of Manipulators and Human Prostheses," IEEE Transactions on Man-Machine Systems, 1969.
![[9] D.E. Whitney, Resolved Motion Rate Control of Manipulators and Human Prostheses, IEEE Transactions on Man-Machine Systems, 1969.](/thumbs/83/87444457.jpg "[9] D.E. Whitney, Resolved Motion Rate Control of Manipulators and Human Prostheses, IEEE Transactions on Man-Machine Systems, 1969.") 160 Chapter 5 Jacobians: velocities and static forces [3] I. Shames, Engineering Mechanics, 2nd edition, Prentice-Hall, Englewood Cliffs, NJ, 1967. [4] D. Orin and W. Schrader, "Efficient Jacobian Determination
160 Chapter 5 Jacobians: velocities and static forces [3] I. Shames, Engineering Mechanics, 2nd edition, Prentice-Hall, Englewood Cliffs, NJ, 1967. [4] D. Orin and W. Schrader, "Efficient Jacobian Determination
KINEMATICS PROGRAMMING FOR TWO COOPERATING ROBOTS PERFORMING TASKS
 KINEMATICS PROGRAMMING FOR TWO COOPERATING ROBOTS PERFORMING TASKS Cristiane Pescador Tonetto Universidade Federal do Espírito Santo cris.tonetto@gmail.com Carlos Rodrigues Rocha Instituto Federal de Educação,
KINEMATICS PROGRAMMING FOR TWO COOPERATING ROBOTS PERFORMING TASKS Cristiane Pescador Tonetto Universidade Federal do Espírito Santo cris.tonetto@gmail.com Carlos Rodrigues Rocha Instituto Federal de Educação,
Operation Trajectory Control of Industrial Robots Based on Motion Simulation
 Operation Trajectory Control of Industrial Robots Based on Motion Simulation Chengyi Xu 1,2, Ying Liu 1,*, Enzhang Jiao 1, Jian Cao 2, Yi Xiao 2 1 College of Mechanical and Electronic Engineering, Nanjing
Operation Trajectory Control of Industrial Robots Based on Motion Simulation Chengyi Xu 1,2, Ying Liu 1,*, Enzhang Jiao 1, Jian Cao 2, Yi Xiao 2 1 College of Mechanical and Electronic Engineering, Nanjing
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018)
: Final Exam (Fall Quarter 2017/2018)") ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
ME/CS 133(a): Final Exam (Fall Quarter 2017/2018) Instructions 1. Limit your total time to 5 hours. You can take a break in the middle of the exam if you need to ask a question, or go to dinner, etc. That
Synthesis of Spatial RPRP Loops for a Given Screw System
 Synthesis of Spatial RPRP Loops for a Given Screw System A. Perez-Gracia Institut de Robotica i Informatica Industrial (IRI) UPC/CSIC, Barcelona, Spain and: College of Engineering, Idaho State Univesity,
Synthesis of Spatial RPRP Loops for a Given Screw System A. Perez-Gracia Institut de Robotica i Informatica Industrial (IRI) UPC/CSIC, Barcelona, Spain and: College of Engineering, Idaho State Univesity,
6340(Print), ISSN (Online) Volume 4, Issue 3, May - June (2013) IAEME AND TECHNOLOGY (IJMET) MODELLING OF ROBOTIC MANIPULATOR ARM
, ISSN (Online) Volume 4, Issue 3, May - June (2013) IAEME AND TECHNOLOGY (IJMET) MODELLING OF ROBOTIC MANIPULATOR ARM") INTERNATIONAL International Journal of JOURNAL Mechanical Engineering OF MECHANICAL and Technology (IJMET), ENGINEERING ISSN 0976 AND TECHNOLOGY (IJMET) ISSN 0976 6340 (Print) ISSN 0976 6359 (Online) Volume
INTERNATIONAL International Journal of JOURNAL Mechanical Engineering OF MECHANICAL and Technology (IJMET), ENGINEERING ISSN 0976 AND TECHNOLOGY (IJMET) ISSN 0976 6340 (Print) ISSN 0976 6359 (Online) Volume
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer
 Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
Matlab Simulator of a 6 DOF Stanford Manipulator and its Validation Using Analytical Method and Roboanalyzer Maitreyi More 1, Rahul Abande 2, Ankita Dadas 3, Santosh Joshi 4 1, 2, 3 Department of Mechanical
The University of Missouri - Columbia Electrical & Computer Engineering Department EE4330 Robotic Control and Intelligence
 The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
The University of Missouri - Columbia Final Exam 1) Clear your desk top of all handwritten papers and personal notes. You may keep only your textbook, a cheat sheet, the test paper, a calculator and a
3/12/2009 Advanced Topics in Robotics and Mechanism Synthesis Term Projects
 3/12/2009 Advanced Topics in Robotics and Mechanism Synthesis Term Projects Due date: 4/23/09 On 4/23/09 and 4/30/09 you will present a 20-25 minute presentation about your work. During this presentation
3/12/2009 Advanced Topics in Robotics and Mechanism Synthesis Term Projects Due date: 4/23/09 On 4/23/09 and 4/30/09 you will present a 20-25 minute presentation about your work. During this presentation
A Full Analytical Solution to the Direct and Inverse Kinematics of the Pentaxis Robot Manipulator
 A Full Analtical Solution to the Direct and Inverse Kinematics of the Pentais Robot Manipulator Moisés Estrada Castañeda, Luis Tupak Aguilar Bustos, Luis A. Gonále Hernánde Instituto Politécnico Nacional
A Full Analtical Solution to the Direct and Inverse Kinematics of the Pentais Robot Manipulator Moisés Estrada Castañeda, Luis Tupak Aguilar Bustos, Luis A. Gonále Hernánde Instituto Politécnico Nacional
Planar Robot Kinematics
 V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
V. Kumar lanar Robot Kinematics The mathematical modeling of spatial linkages is quite involved. t is useful to start with planar robots because the kinematics of planar mechanisms is generally much simpler
PSO based Adaptive Force Controller for 6 DOF Robot Manipulators
 , October 25-27, 2017, San Francisco, USA PSO based Adaptive Force Controller for 6 DOF Robot Manipulators Sutthipong Thunyajarern, Uma Seeboonruang and Somyot Kaitwanidvilai Abstract Force control in
, October 25-27, 2017, San Francisco, USA PSO based Adaptive Force Controller for 6 DOF Robot Manipulators Sutthipong Thunyajarern, Uma Seeboonruang and Somyot Kaitwanidvilai Abstract Force control in
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
Manipulator Performance Constraints in Cartesian Admittance Control for Human-Robot Cooperation
 216 IEEE International Conference on Robotics and Automation (ICRA Stockholm, Sweden, May 16-21, 216 Manipulator Performance Constraints in Cartesian Admittance Control for Human-Robot Cooperation Fotios
216 IEEE International Conference on Robotics and Automation (ICRA Stockholm, Sweden, May 16-21, 216 Manipulator Performance Constraints in Cartesian Admittance Control for Human-Robot Cooperation Fotios
Stackable 4-BAR Mechanisms and Their Robotic Applications
 The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
Kinematics and dynamics analysis of micro-robot for surgical applications
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
Robots are built to accomplish complex and difficult tasks that require highly non-linear motions.
 Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Path and Trajectory specification Robots are built to accomplish complex and difficult tasks that require highly non-linear motions. Specifying the desired motion to achieve a specified goal is often a
Kinematics. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Kinematics CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Kinematics Kinematics: The science of pure motion, considered without reference to the matter of objects moved, or to the
Control of industrial robots. Kinematic redundancy
 Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
Control of industrial robots Kinematic redundancy Prof. Paolo Rocco (paolo.rocco@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Kinematic redundancy Direct kinematics
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Singularity Loci of Planar Parallel Manipulators with Revolute Joints
 Singularity Loci of Planar Parallel Manipulators with Revolute Joints ILIAN A. BONEV AND CLÉMENT M. GOSSELIN Département de Génie Mécanique Université Laval Québec, Québec, Canada, G1K 7P4 Tel: (418) 656-3474,
Singularity Loci of Planar Parallel Manipulators with Revolute Joints ILIAN A. BONEV AND CLÉMENT M. GOSSELIN Département de Génie Mécanique Université Laval Québec, Québec, Canada, G1K 7P4 Tel: (418) 656-3474,
Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator robot
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
Resolution of spherical parallel Manipulator (SPM) forward kinematic model (FKM) near the singularities
 forward kinematic model (FKM) near the singularities") Resolution of spherical parallel Manipulator (SPM) forward kinematic model (FKM) near the singularities H. Saafi a, M. A. Laribi a, S. Zeghloul a a. Dept. GMSC, Pprime Institute, CNRS - University of Poitiers
Resolution of spherical parallel Manipulator (SPM) forward kinematic model (FKM) near the singularities H. Saafi a, M. A. Laribi a, S. Zeghloul a a. Dept. GMSC, Pprime Institute, CNRS - University of Poitiers
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
Visual Tracking of a Hand-eye Robot for a Moving Target Object with Multiple Feature Points: Translational Motion Compensation Approach
 Visual Tracking of a Hand-eye Robot for a Moving Target Object with Multiple Feature Points: Translational Motion Compensation Approach Masahide Ito Masaaki Shibata Department of Electrical and Mechanical
Visual Tracking of a Hand-eye Robot for a Moving Target Object with Multiple Feature Points: Translational Motion Compensation Approach Masahide Ito Masaaki Shibata Department of Electrical and Mechanical
Using Redundancy in Serial Planar Mechanisms to Improve Output-Space Tracking Accuracy
 Using Redundancy in Serial Planar Mechanisms to Improve Output-Space Tracking Accuracy S. Ambike, J.P. Schmiedeler 2 and M.M. Stanišić 2 The Ohio State University, Columbus, Ohio, USA; e-mail: ambike.@osu.edu
Using Redundancy in Serial Planar Mechanisms to Improve Output-Space Tracking Accuracy S. Ambike, J.P. Schmiedeler 2 and M.M. Stanišić 2 The Ohio State University, Columbus, Ohio, USA; e-mail: ambike.@osu.edu
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2005-06 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2005-06 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
Kinematics of Closed Chains
 Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Chapter 2 Intelligent Behaviour Modelling and Control for Mobile Manipulators
 Chapter Intelligent Behaviour Modelling and Control for Mobile Manipulators Ayssam Elkady, Mohammed Mohammed, Eslam Gebriel, and Tarek Sobh Abstract In the last several years, mobile manipulators have
Chapter Intelligent Behaviour Modelling and Control for Mobile Manipulators Ayssam Elkady, Mohammed Mohammed, Eslam Gebriel, and Tarek Sobh Abstract In the last several years, mobile manipulators have
Solving IK problems for open chains using optimization methods
 Proceedings of the International Multiconference on Computer Science and Information Technology pp. 933 937 ISBN 978-83-60810-14-9 ISSN 1896-7094 Solving IK problems for open chains using optimization
Proceedings of the International Multiconference on Computer Science and Information Technology pp. 933 937 ISBN 978-83-60810-14-9 ISSN 1896-7094 Solving IK problems for open chains using optimization
Workspace and joint space analysis of the 3-RPS parallel robot
 Workspace and joint space analysis of the 3-RPS parallel robot Damien Chablat, Ranjan Jha, Fabrice Rouillier, Guillaume Moroz To cite this version: Damien Chablat, Ranjan Jha, Fabrice Rouillier, Guillaume
Workspace and joint space analysis of the 3-RPS parallel robot Damien Chablat, Ranjan Jha, Fabrice Rouillier, Guillaume Moroz To cite this version: Damien Chablat, Ranjan Jha, Fabrice Rouillier, Guillaume
A NOVEL METHOD FOR THE DESIGN OF 2-DOF PARALLEL MECHANISMS FOR MACHINING APPLICATIONS
 A NOVEL METHOD FOR THE DESIGN OF 2-DOF PARALLEL MECHANISMS FOR MACHINING APPLICATIONS Félix Majou Institut de Recherches en Communications et Cybernétique de Nantes 1, 1 rue de la Noë, 44321 Nantes, FRANCE
A NOVEL METHOD FOR THE DESIGN OF 2-DOF PARALLEL MECHANISMS FOR MACHINING APPLICATIONS Félix Majou Institut de Recherches en Communications et Cybernétique de Nantes 1, 1 rue de la Noë, 44321 Nantes, FRANCE
Robot Vision Control of robot motion from video. M. Jagersand
 Robot Vision Control of robot motion from video M. Jagersand Vision-Based Control (Visual Servoing) Initial Image User Desired Image Vision-Based Control (Visual Servoing) : Current Image Features : Desired
Robot Vision Control of robot motion from video M. Jagersand Vision-Based Control (Visual Servoing) Initial Image User Desired Image Vision-Based Control (Visual Servoing) : Current Image Features : Desired
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Written exams of Robotics 1
 Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Written exams of Robotics 1 http://www.diag.uniroma1.it/~deluca/rob1_en.php All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 06.11 2 Planar
Homogeneous coordinates, lines, screws and twists
 Homogeneous coordinates, lines, screws and twists In lecture 1 of module 2, a brief mention was made of homogeneous coordinates, lines in R 3, screws and twists to describe the general motion of a rigid
Homogeneous coordinates, lines, screws and twists In lecture 1 of module 2, a brief mention was made of homogeneous coordinates, lines in R 3, screws and twists to describe the general motion of a rigid
AVATAR KINEMATICS MODELING FOR TELECOLLABORATIVE VIRTUAL ENVIRONMENTS. Cristian Luciano Pat Banerjee
 Proceedings of the 2000 Winter Simulation Conference J. A. Joines, R. R. Barton, K. Kang, and P. A. Fishwick, eds. AVATAR KINEMATICS MODELING FOR TELECOLLABORATIVE VIRTUAL ENVIRONMENTS Cristian Luciano
Proceedings of the 2000 Winter Simulation Conference J. A. Joines, R. R. Barton, K. Kang, and P. A. Fishwick, eds. AVATAR KINEMATICS MODELING FOR TELECOLLABORATIVE VIRTUAL ENVIRONMENTS Cristian Luciano
FROM MANIPULATION TO WHEELED MOBILE MANIPULATION : ANALOGIES AND DIFFERENCES. B. Bayle J.-Y. Fourquet M. Renaud
 FROM MANIPULATION TO WHEELED MOBILE MANIPULATION : ANALOGIES AND DIFFERENCES B. Bayle J.-Y. Fourquet M. Renaud LSIIT, Strasbourg, France ENIT, Tarbes, France LAAS-CNRS, Toulouse, France Abstract: a generic
FROM MANIPULATION TO WHEELED MOBILE MANIPULATION : ANALOGIES AND DIFFERENCES B. Bayle J.-Y. Fourquet M. Renaud LSIIT, Strasbourg, France ENIT, Tarbes, France LAAS-CNRS, Toulouse, France Abstract: a generic
New shortest-path approaches to visual servoing
 New shortest-path approaches to visual servoing Ville Laboratory of Information rocessing Lappeenranta University of Technology Lappeenranta, Finland kyrki@lut.fi Danica Kragic and Henrik I. Christensen
New shortest-path approaches to visual servoing Ville Laboratory of Information rocessing Lappeenranta University of Technology Lappeenranta, Finland kyrki@lut.fi Danica Kragic and Henrik I. Christensen
KINEMATIC ANALYSIS OF ADEPT VIPER USING NEURAL NETWORK
 Proceedings of the National Conference on Trends and Advances in Mechanical Engineering, YMCA Institute of Engineering, Faridabad, Haryana., Dec 9-10, 2006. KINEMATIC ANALYSIS OF ADEPT VIPER USING NEURAL
Proceedings of the National Conference on Trends and Advances in Mechanical Engineering, YMCA Institute of Engineering, Faridabad, Haryana., Dec 9-10, 2006. KINEMATIC ANALYSIS OF ADEPT VIPER USING NEURAL
Kinematics Analysis of Free-Floating Redundant Space Manipulator based on Momentum Conservation. Germany, ,
 Kinematics Analysis of Free-Floating Redundant Space Manipulator based on Momentum Conservation Mingming Wang (1) (1) Institute of Astronautics, TU Muenchen, Boltzmannstr. 15, D-85748, Garching, Germany,
Kinematics Analysis of Free-Floating Redundant Space Manipulator based on Momentum Conservation Mingming Wang (1) (1) Institute of Astronautics, TU Muenchen, Boltzmannstr. 15, D-85748, Garching, Germany,
Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures
 Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures S. B. Nokleby F. Firmani A. Zibil R. P. Podhorodeski UOIT University of Victoria University of Victoria University of Victoria
Force-Moment Capabilities of Redundantly-Actuated Planar-Parallel Architectures S. B. Nokleby F. Firmani A. Zibil R. P. Podhorodeski UOIT University of Victoria University of Victoria University of Victoria