Controller Calibration using a Global Dynamic Engine Model
|
|
|
- Emily Bryant
- 5 years ago
- Views:
Transcription




1 Controller Calibration using a Global Dynamic Engine Model Marie-Sophie Vogels Johannes Birnstingl Timo Combé

2 CONTENT Introduction Description of Global Dynamic Model Concept Controller Calibration Practical Example Result Comparison Summary and Conclusion Page 2

![] INTRODUCTION](/docs-images/80/81776943/images/3-2.jpg "Challenge ECU")








3 Time [sec.] INTRODUCTION Challenge ECU Calibration Demands of Legislation and Customer Contradicting Targets Diversity of Variants Cost and Time Pressure in Projects XiL-based Calibration Process Real ECU Real Engine Test Bed \ Vehicle Stimulation Responses Sim. \ Real ECU Virtual Engine XiL System XiL = MiL, SiL, HiL Page 3




4 MODEL CONCEPT INPUTS thermodynamic characteristics dynamic OUTPUTS Two stage empirical modeling Global static mean-value model for combustion process Dynamic behavior for the air path Usage of artificial neural networks physically interpretable approach due to thermodynamically based cause-and-effect chain process outputs models (e.g. for emissions) can be parameterized by steady-state measurements Page 4


5 MODEL CONCEPT Global dynamic modeling by partitioning over speed and load Using smaller operating areas allow Stimulation of relevant signal frequencies with sufficient distribution of amplitude levels by using APRBS test design Excluding specific combinations of inputs locally Separate identification with one dynamic INN allowing different dynamic behavior Superposition of semi-global models via validity functions over speed and load APRBS: Amplitude-modulated Pseudo Random Binary Signal INN: Intelligent Neural Networks Page 5
6 CONTROLLER CALIBRATION 1. Base calibration of the controller in each linear operating point of the engine using standard tuning methodologies 2. Enhanced adaptation of the initial calibration to meet the non-linear plant characteristics and to optimize the control-quality during dynamic driving Conventional Approach Engine Apply tuning method Check closed loop performance Controller calibration Model-based Approach Engine Dynamic and static variations Global dynamic engine model Apply tuning method Check closed loop performance Controller calibration Page 6
7 CONTROLLER CALIBRATION 1. Base calibration of the controller in each linear operating point of the engine using standard tuning methodologies Ziegler-Nichols closed loop tuning method well-known and wide-spread approach based on a quarter wave decay meant to give PID loops best disturbance rejection performance. This setting typically does not give very good command tracking performance. revised Ziegler-Nichols tuning rules in order to increase control quality and loop stability Page 7
8 CONTROLLER CALIBRATION 1. Base calibration of the controller in each linear operating point of the engine using standard tuning methodologies Ziegler-Nichols closed loop tuning method ACAT = AVL internal tool used for the automated offline calibration of control loops inside the ECU ( Automated Controller Application Tool ) The basic controller tuning principle is the so-called Linear Quadratic Regulator (LQR) optimization, an algorithm operating with the state-space representation of a control-loop Workflow: 1. Create controller-structure dependent plugin 2. Record plant step answers (operating point dependent) 3. Read and prepare measurement data 4. Approximate plant transfer function 5. Calculate according controller parameters 6. Create controller maps out of local controller parameters Page 8
9 CONTROLLER CALIBRATION 1. Base calibration of the controller in each linear operating point of the engine using standard tuning methodologies Ziegler-Nichols closed loop tuning method ACAT AutoPID Tuner = a Matlab-based online controller-calibration tool developed by AVL the plant is identified by an excitation at the critical frequency based on the so-called Auto-Relay tuning Page 9

10 PRACTICAL EXAMPLE Air path control of a modern Diesel engine was chosen as representative example for model-based controller calibration Wastegate actuator X boost pressure sensor Page 10

11 PRACTICAL EXAMPLE A global dynamic model was created engine speed injection quantity main timing Wastegate position boost pressure Model validity range: Engine speed: rpm Load: combustion border full load Main timing: +/- 4 CA Wastegate position: +/- 10 % boost pressure 22 local operating areas were identified and combined to one global dynamic model Page 11
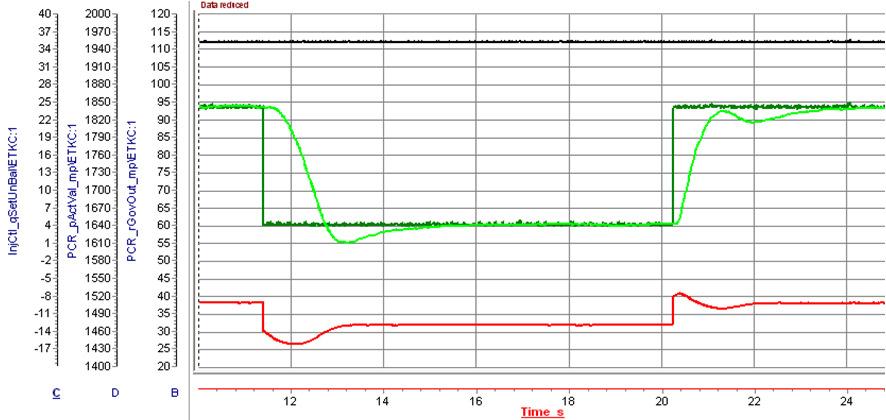
12 PRACTICAL EXAMPLE The validation results show sufficient modeling quality in terms of dynamic behavior Extraction of an FTP cycle: PCR_pActVal_mp measured predicted time [s] Effort estimation for generating global dynamic model gross test bed usage: gross office usage: 11 days 10 days Page 12
13 RESULT COMPARISON Comparison of stability border between real engine and simulation model simulated gain margin [%/hpa] simulated critical time constant [s] real gain margin [%/hpa] real critical time constant [s] sufficient reproducibility of gain margin no correlation of critical frequency but in general the absolute range of the results is well represented Page 13

14 RESULT COMPARISON For the comparison of calibration results, a cost function representing the most important criteria from the point of view of an engineer was chosen: T a T s Demand value e e max t Page 14
15 RESULT COMPARISON (+/- 10%) Page 15
16 RESULT COMPARISON (+/- 10%) Page 16
17 RESULT COMPARISON (+/- 10%) Page 17

18 RESULT COMPARISON Controller calibration using ACAT approach on real engine Controller calibration using ACAT approach on global dynamic model Page 18
19 SUMMARY and CONCLUSION Model concept in general suitable for controller calibration But: model quality not sufficient at critical point of the plant, even though the absolute range of the critical characteristics was identical Three different controller calibration methods were investigated Algorithm based on the time domain ( ACAT) shows in general better robustness compared to algorithms based on the critical point ( Ziegler-Nichols / AutoPID) The calibration using the simulation model leads in principle for all methods to stable controller behavior whereas ACAT show less deviation in quality Due to the generation effort of the model, it is only recommendable in combination with other calibration tasks But: the usage of such a model enables a more complex optimization algorithm based on the non-linear and operating range dependent behavior of the engine like it is described in modern ECU functionalities (e.g. transient correction parameters, different parameters for large and small deviation window) next step of development Page 19
20 Controller Calibration using a Global Dynamic Engine Model THANK YOU VERY MUCH FOR YOUR ATTENTION
Model-based Calibration of HD Engines. Benjamin Tilch, Rico Möllmann, Axel Steinmann, Dr. Reza Rezaei GT-SUITE Conference, Frankfurt, October 2014
 Model-based Calibration of HD Engines Benjamin Tilch, Rico Möllmann, Axel Steinmann, Dr. Reza Rezaei GT-SUITE Conference, Frankfurt, October 2014 Model-based Calibration of HD Engines Contents Introduction
Model-based Calibration of HD Engines Benjamin Tilch, Rico Möllmann, Axel Steinmann, Dr. Reza Rezaei GT-SUITE Conference, Frankfurt, October 2014 Model-based Calibration of HD Engines Contents Introduction
Model Based Systems Engineering Engine Control: from concept to validation. Jan Smolders Technical Account Manager
 Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Engine Plant Model Development and Controller Calibration using Powertrain Blockset TM
 Engine Plant Model Development and Controller Calibration using Powertrain Blockset TM Brad Hieb Scott Furry Application Engineering Consulting Services 2017 The MathWorks, Inc. 1 Key Take-Away s Engine
Engine Plant Model Development and Controller Calibration using Powertrain Blockset TM Brad Hieb Scott Furry Application Engineering Consulting Services 2017 The MathWorks, Inc. 1 Key Take-Away s Engine
Closing the loop in engine control by virtual sensors
 Closing the loop in engine control by virtual sensors Luigi del Re Johannes Kepler University of Linz Institute for Design and Control of Mechatronical Systems Message Actually obvious: Closing the loop
Closing the loop in engine control by virtual sensors Luigi del Re Johannes Kepler University of Linz Institute for Design and Control of Mechatronical Systems Message Actually obvious: Closing the loop
Creation and Validation of a High-Accuracy, Real-Time-Capable Mean-Value GT-POWER Model
 1 Creation and Validation of a High-Accuracy, Real-Time-Capable Mean-Value GT-POWER Model Tim Prochnau Advanced Analysis and Simulation Department Engine Group International Truck and Engine Corporation
1 Creation and Validation of a High-Accuracy, Real-Time-Capable Mean-Value GT-POWER Model Tim Prochnau Advanced Analysis and Simulation Department Engine Group International Truck and Engine Corporation
System Optimisation for the Calibration of ECU Functions
 DEVELOPMENT Engine Management System Optimisation for the Calibration of ECU Functions SGE The Design of Experiments method is an important tool for modeling complex systems. The transfer of models into
DEVELOPMENT Engine Management System Optimisation for the Calibration of ECU Functions SGE The Design of Experiments method is an important tool for modeling complex systems. The transfer of models into
EtherCAT with MORPHEE 2, D2T s Automation System A fast and reliable communication with the test bed
 EtherCAT with MORPHEE 2, D2T s Automation System A fast and reliable communication with the test bed Ing Jérémie EFFLAME (1) ; Ing Stéphane PELLETIER (2) 1) Product department, 11 rue Denis Papin, 78190
EtherCAT with MORPHEE 2, D2T s Automation System A fast and reliable communication with the test bed Ing Jérémie EFFLAME (1) ; Ing Stéphane PELLETIER (2) 1) Product department, 11 rue Denis Papin, 78190
Hardware-In-Loop Test Setup Automation
 ECU Software Validation using Hardware-In-Loop Test Setup Automation Shrirang Agashe Eaton Technologies Pvt. Ltd. EON Free Zone, Cluster C, Wing 1, MIDC, Kharadi, Pune 411014 20-Oct-12 Need for Hardware
ECU Software Validation using Hardware-In-Loop Test Setup Automation Shrirang Agashe Eaton Technologies Pvt. Ltd. EON Free Zone, Cluster C, Wing 1, MIDC, Kharadi, Pune 411014 20-Oct-12 Need for Hardware
CHAPTER 1 INTRODUCTION
 1 CHAPTER 1 INTRODUCTION 1.1 Motivation The presence of uncertainties and disturbances has always been a vital issue in the control of dynamic systems. The classical linear controllers, PI and PID controllers
1 CHAPTER 1 INTRODUCTION 1.1 Motivation The presence of uncertainties and disturbances has always been a vital issue in the control of dynamic systems. The classical linear controllers, PI and PID controllers
ADVANCED MODELING AND OPTIMIZATION FOR VIRTUAL CALIBRATION OF INTERNAL COMBUSTION ENGINES
 2017 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM POWER & MOBILITY (P&M) TECHNICAL SESSION AUGUST 8-10, 2017 - NOVI, MICHIGAN ADVANCED MODELING AND OPTIMIZATION FOR VIRTUAL CALIBRATION
2017 NDIA GROUND VEHICLE SYSTEMS ENGINEERING AND TECHNOLOGY SYMPOSIUM POWER & MOBILITY (P&M) TECHNICAL SESSION AUGUST 8-10, 2017 - NOVI, MICHIGAN ADVANCED MODELING AND OPTIMIZATION FOR VIRTUAL CALIBRATION
Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India
 Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India 2014 The MathWorks, Inc. 1 Are you using different tools for design
Control System Design and Rapid Prototyping Using Simulink Chirag Patel Sr. Application Engineer Modeling and Simulink MathWorks India 2014 The MathWorks, Inc. 1 Are you using different tools for design
Crank Angle-resolved Realtime Engine Simulation for the Optimization of Control Strategies. Engine Management
 Development Engine Management Crank Angle-resolved Realtime Engine Simulation for the Optimization of Control Strategies An engine simulation model permits new control strategies to be optimized at an
Development Engine Management Crank Angle-resolved Realtime Engine Simulation for the Optimization of Control Strategies An engine simulation model permits new control strategies to be optimized at an
Engine Calibration Process for Evaluation across the Torque- Speed Map
 Engine Calibration Process for Evaluation across the Torque- Speed Map Brian Froelich Tara Hemami Manish Meshram Udaysinh Patil November 3, 2014 Outline : Background Objective Calibration process for torque
Engine Calibration Process for Evaluation across the Torque- Speed Map Brian Froelich Tara Hemami Manish Meshram Udaysinh Patil November 3, 2014 Outline : Background Objective Calibration process for torque
Spork Installation Instructions
 Table of Contents 1. Table of Contents 1 2. Requirements... 1 3. Bluetooth Connection Process 2 4. Software Installation... 3 5. Retrieving Spork s Serial Number... 4 6. Retrieving the ECU s ROM Calibration..
Table of Contents 1. Table of Contents 1 2. Requirements... 1 3. Bluetooth Connection Process 2 4. Software Installation... 3 5. Retrieving Spork s Serial Number... 4 6. Retrieving the ECU s ROM Calibration..
Demonstration of the DoE Process with Software Tools
 Demonstration of the DoE Process with Software Tools Anthony J. Gullitti, Donald Nutter Abstract While the application of DoE methods in powertrain development is well accepted, implementation of DoE methods
Demonstration of the DoE Process with Software Tools Anthony J. Gullitti, Donald Nutter Abstract While the application of DoE methods in powertrain development is well accepted, implementation of DoE methods
MORPHEE 2, EtherCAT and Fast ECU Access. D2T s automation system : A fast and reliable communication with test bed
 MORPHEE 2, EtherCAT and Fast ECU Access D2T s automation system : A fast and reliable communication with test bed 1 Contents MORPHEE 2 Overview EtherCAT Overview EtherCAT Advantages EtherCAT in MORPHEE
MORPHEE 2, EtherCAT and Fast ECU Access D2T s automation system : A fast and reliable communication with test bed 1 Contents MORPHEE 2 Overview EtherCAT Overview EtherCAT Advantages EtherCAT in MORPHEE
An automated approach to derive combustionand NOx-models for GT-POWER simulations
 An automated approach to derive combustionand NOx-models for GT-POWER simulations Dr.-Ing. Jan Boyde, Dr.-Ing. Claus-Oliver Schmalzing Outline Motivation Automated cylinder pressure analysis Generation
An automated approach to derive combustionand NOx-models for GT-POWER simulations Dr.-Ing. Jan Boyde, Dr.-Ing. Claus-Oliver Schmalzing Outline Motivation Automated cylinder pressure analysis Generation
PROPULSION CI. Continuous integration and continuous validation with explorative tests for propulsion controls and calibration
 PROPULSION CI Continuous integration and continuous validation with explorative tests for propulsion controls and calibration 1 In the beginning Started 2002 10 model developers SourceSafe/Vault Used as
PROPULSION CI Continuous integration and continuous validation with explorative tests for propulsion controls and calibration 1 In the beginning Started 2002 10 model developers SourceSafe/Vault Used as
Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL
 SENIOR PROJECT PROPOSAL") Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL By: Mark Bright and Mike Donaldson Project Advisor: Dr. Gary Dempsey Date: Dec 11, 2008 1 Project Summary Cooling
Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL By: Mark Bright and Mike Donaldson Project Advisor: Dr. Gary Dempsey Date: Dec 11, 2008 1 Project Summary Cooling
ENGINE IDLE SPEED SYSTEM CALIBRATION AND OPTIMIZATION USING LEAST SQUARES SUPPORT VECTOR MACHINE AND GENETIC ALGORITHM
 F2008-SC-008 ENGINE IDLE SPEED SYSTEM CALIBRATION AND OPTIMIZATION USING LEAST SQUARES SUPPORT VECTOR MACHINE AND GENETIC ALGORITHM 1 Li, Ke *, 1 Wong, Pakkin, 1 Tam, Lapmou, 1 Wong, Hangcheong 1 Department
F2008-SC-008 ENGINE IDLE SPEED SYSTEM CALIBRATION AND OPTIMIZATION USING LEAST SQUARES SUPPORT VECTOR MACHINE AND GENETIC ALGORITHM 1 Li, Ke *, 1 Wong, Pakkin, 1 Tam, Lapmou, 1 Wong, Hangcheong 1 Department
MODEL-BASED CONTROL DESIGN FOR IC-ENGINES ON DYNAMOMETERS: THE TOOLBOX OPTIMOT. M. Hafner, M. Weber, R. Isermann
 Copyright 2002 IFAC 15th Triennial World Congress, Barcelona, Spain MODEL-BASED CONTROL DESIGN FOR IC-ENGINES ON DYNAMOMETERS: THE TOOLBOX OPTIMOT M. Hafner, M. Weber, R. Isermann Darmstadt University
Copyright 2002 IFAC 15th Triennial World Congress, Barcelona, Spain MODEL-BASED CONTROL DESIGN FOR IC-ENGINES ON DYNAMOMETERS: THE TOOLBOX OPTIMOT M. Hafner, M. Weber, R. Isermann Darmstadt University
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
PID tuning & UNICOS PID auto-tuning
 PID tuning & UNICOS PID auto-tuning Benjamin Bradu Ruben Marti Martinez CERN, BE-ICS On behalf of UNICOS-CPC Team 19 th April 2016 Content Regulation loops and feedback control Manual PID tuning in open
PID tuning & UNICOS PID auto-tuning Benjamin Bradu Ruben Marti Martinez CERN, BE-ICS On behalf of UNICOS-CPC Team 19 th April 2016 Content Regulation loops and feedback control Manual PID tuning in open
EMO A Real-World Application of a Many-Objective Optimisation Complexity Reduction Process
 EMO 2013 A Real-World Application of a Many-Objective Optimisation Complexity Reduction Process Robert J. Lygoe, Mark Cary, and Peter J. Fleming 22-March-2013 Contents Introduction Background Process Enhancements
EMO 2013 A Real-World Application of a Many-Objective Optimisation Complexity Reduction Process Robert J. Lygoe, Mark Cary, and Peter J. Fleming 22-March-2013 Contents Introduction Background Process Enhancements
FULL VIRTUALIZATION OF RENAULT'S ENGINE MANAGEMENT SOFTWARE APPLICATION TO SYSTEM DEVELOPMENT
 FULL VIRTUALIZATION OF RENAULT'S ENGINE MANAGEMENT SOFTWARE APPLICATION TO SYSTEM DEVELOPMENT D. von Wissel, Y. Jordan,, RENAULT A. Dolha, J. Mauss QTronic Introduction Renault has an established engine
FULL VIRTUALIZATION OF RENAULT'S ENGINE MANAGEMENT SOFTWARE APPLICATION TO SYSTEM DEVELOPMENT D. von Wissel, Y. Jordan,, RENAULT A. Dolha, J. Mauss QTronic Introduction Renault has an established engine
SIMPACK - A Tool for Off-Line and Real- Time Simulation
 SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
Mathieu Dutré - Application Specialist MBSE. Analysis and optimization of physical models for HIL simulation
 Mathieu Dutré - Application Specialist MBSE Analysis and optimization of physical models for HIL simulation Smarter decisions, better products. Industry drivers for HIL simulation Model Driven Virtual
Mathieu Dutré - Application Specialist MBSE Analysis and optimization of physical models for HIL simulation Smarter decisions, better products. Industry drivers for HIL simulation Model Driven Virtual
Robust Pole Placement using Linear Quadratic Regulator Weight Selection Algorithm
 329 Robust Pole Placement using Linear Quadratic Regulator Weight Selection Algorithm Vishwa Nath 1, R. Mitra 2 1,2 Department of Electronics and Communication Engineering, Indian Institute of Technology,
329 Robust Pole Placement using Linear Quadratic Regulator Weight Selection Algorithm Vishwa Nath 1, R. Mitra 2 1,2 Department of Electronics and Communication Engineering, Indian Institute of Technology,
ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER
 SIMULATION TOOL: GT-POWER") CHAPTER 4 ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER 4.1 INTRODUCTION Combustion analysis and optimization of any reciprocating internal combustion engines is too complex and intricate activity. It
CHAPTER 4 ONE DIMENSIONAL (1D) SIMULATION TOOL: GT-POWER 4.1 INTRODUCTION Combustion analysis and optimization of any reciprocating internal combustion engines is too complex and intricate activity. It
Module Test in System Context
 Module Test in System Context Tjark Kiefer, Ingo Matheis Abstract Module tests are well proven methods to assure software quality. But with raising complexity of the code this method is not without its
Module Test in System Context Tjark Kiefer, Ingo Matheis Abstract Module tests are well proven methods to assure software quality. But with raising complexity of the code this method is not without its
Lab 2: Real-Time Automotive Suspension system Simulator
 ENGG*4420 Real Time System Design Lab 2: Real-Time Automotive Suspension system Simulator TA: Aws Abu-Khudhair (aabukhud@uoguelph.ca) Due: Week of Oct. 12th Aws Abu-Khudhair ENGG*4420 1 Today s Activities
ENGG*4420 Real Time System Design Lab 2: Real-Time Automotive Suspension system Simulator TA: Aws Abu-Khudhair (aabukhud@uoguelph.ca) Due: Week of Oct. 12th Aws Abu-Khudhair ENGG*4420 1 Today s Activities
Verification, Validation, and Test with Model-Based Design
 2008-01-2709 Verification, Validation, and Test with Model-Based Design Copyright 2008 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Mirko Conrad The MathWorks, Inc. ABSTRACT Model-Based Design with
2008-01-2709 Verification, Validation, and Test with Model-Based Design Copyright 2008 The MathWorks, Inc Tom Erkkinen The MathWorks, Inc. Mirko Conrad The MathWorks, Inc. ABSTRACT Model-Based Design with
FIELDVUE DVC6200 and DVC6200f Digital Valve Controller Management of Change Guide
 Fisher FIELDVUE DVC6200 and DVC6200f Digital Valve Controller Management of Change Guide 2011 Fisher Controls International LLC. All rights reserved. MY30 (H:) TABLE OF CONTENTS Background... 3 Management
Fisher FIELDVUE DVC6200 and DVC6200f Digital Valve Controller Management of Change Guide 2011 Fisher Controls International LLC. All rights reserved. MY30 (H:) TABLE OF CONTENTS Background... 3 Management
elektronik Security for Software and IT ECU ENERGY STORAGE TESTING COVER STORY Gasoline Direct Injection in-the-loop
 www.atzonline.com 03 May 2015 Volume 10 elektronik W O R L D W I D E COVER STORY Security for Software and IT ECU Gasoline Direct Injection in-the-loop TESTING Tablets in Mobile Measurement Technique ENERGY
www.atzonline.com 03 May 2015 Volume 10 elektronik W O R L D W I D E COVER STORY Security for Software and IT ECU Gasoline Direct Injection in-the-loop TESTING Tablets in Mobile Measurement Technique ENERGY
Modeling and control of wastegate equipped turbocharged engines
 University of New Mexico UNM Digital Repository Mechanical Engineering ETDs Engineering ETDs 9-9-2010 Modeling and control of wastegate equipped turbocharged engines Isaac H. Brito Follow this and additional
University of New Mexico UNM Digital Repository Mechanical Engineering ETDs Engineering ETDs 9-9-2010 Modeling and control of wastegate equipped turbocharged engines Isaac H. Brito Follow this and additional
Introduction to Simulink Design Optimization
 2009 The MathWorks, Inc. Introduction to Simulink Design Optimization Estimate and optimize Simulink model parameters Arkadiy Turevskiy and Alec Stothert Introduction to Simulink Design Optimization Estimate
2009 The MathWorks, Inc. Introduction to Simulink Design Optimization Estimate and optimize Simulink model parameters Arkadiy Turevskiy and Alec Stothert Introduction to Simulink Design Optimization Estimate
Control Systems. Introduction to Control System.
 Introduction to Control System chibum@seoultech.ac.kr Lecture Outline History of automatic control Examples of control systems Types of controller Control System Control system: An interconnection of components
Introduction to Control System chibum@seoultech.ac.kr Lecture Outline History of automatic control Examples of control systems Types of controller Control System Control system: An interconnection of components
p. 1 p. 9 p. 26 p. 56 p. 62 p. 68
 The Challenges and Opportunities Faced by Utilities using Modern Protection and Control Systems - Paper Unavailable Trends in Protection and Substation Automation Systems and Feed-backs from CIGRE Activities
The Challenges and Opportunities Faced by Utilities using Modern Protection and Control Systems - Paper Unavailable Trends in Protection and Substation Automation Systems and Feed-backs from CIGRE Activities
Reuse of Hardware Independent Test Sequences across MiL-, SiL- and HiL-Test Scenarios
 Reuse of Hardware Independent Test Sequences across MiL-, SiL- and HiL-Test Scenarios Testing Expo 2008 Stuttgart Berner & Mattner Systemtechnik GmbH Contents Test methods in the automotive industry Problems
Reuse of Hardware Independent Test Sequences across MiL-, SiL- and HiL-Test Scenarios Testing Expo 2008 Stuttgart Berner & Mattner Systemtechnik GmbH Contents Test methods in the automotive industry Problems
Cluster Simulation with Integrated Workflow and Test Management. Chandu Puliroju dspace Inc.
 Cluster Simulation with Integrated Workflow and Test Management Chandu Puliroju dspace Inc. ADAS and Autonomous Driving Imagine an autonomous car on a crowded crossroads Test Drive Test Drive Test Drive
Cluster Simulation with Integrated Workflow and Test Management Chandu Puliroju dspace Inc. ADAS and Autonomous Driving Imagine an autonomous car on a crowded crossroads Test Drive Test Drive Test Drive
Lab 2: Real-Time Automotive Suspension system Simulator
 ENGG*4420 Real Time System Design Lab 2: Real-Time Automotive Suspension system Simulator TA: Matthew Mayhew (mmayhew@uoguelph.ca) Due: Fri. Oct 12 th / Mon Oct 15 th ENGG*4420 1 Today s Activities Lab
ENGG*4420 Real Time System Design Lab 2: Real-Time Automotive Suspension system Simulator TA: Matthew Mayhew (mmayhew@uoguelph.ca) Due: Fri. Oct 12 th / Mon Oct 15 th ENGG*4420 1 Today s Activities Lab
Supplementary Figure 1. Decoding results broken down for different ROIs
 Supplementary Figure 1 Decoding results broken down for different ROIs Decoding results for areas V1, V2, V3, and V1 V3 combined. (a) Decoded and presented orientations are strongly correlated in areas
Supplementary Figure 1 Decoding results broken down for different ROIs Decoding results for areas V1, V2, V3, and V1 V3 combined. (a) Decoded and presented orientations are strongly correlated in areas
Prototyping and Deployment of Real- Time Signal Processing Algorithms for Engine Control and Diagnosis
 Controlled CO 2 Diversified fuels Fuel-efficient vehicles Clean refining Extended reserves Prototyping and Deployment of Real- Time Signal Processing Algorithms for Engine Control and Diagnosis Fabrice
Controlled CO 2 Diversified fuels Fuel-efficient vehicles Clean refining Extended reserves Prototyping and Deployment of Real- Time Signal Processing Algorithms for Engine Control and Diagnosis Fabrice
Hvordan tænker vi uddannelse i industriel IT?
 Hvordan tænker vi uddannelse i industriel IT? John Bagterp Jørgensen Technical University of Denmark Dansk Automationsselskab (Dau) Hvordan bygger vi IT ind i automationsuddannelserne October 25, 2017,
Hvordan tænker vi uddannelse i industriel IT? John Bagterp Jørgensen Technical University of Denmark Dansk Automationsselskab (Dau) Hvordan bygger vi IT ind i automationsuddannelserne October 25, 2017,
Simulation of In-Cylinder Flow Phenomena with ANSYS Piston Grid An Improved Meshing and Simulation Approach
 Simulation of In-Cylinder Flow Phenomena with ANSYS Piston Grid An Improved Meshing and Simulation Approach Dipl.-Ing. (FH) Günther Lang, CFDnetwork Engineering Dipl.-Ing. Burkhard Lewerich, CFDnetwork
Simulation of In-Cylinder Flow Phenomena with ANSYS Piston Grid An Improved Meshing and Simulation Approach Dipl.-Ing. (FH) Günther Lang, CFDnetwork Engineering Dipl.-Ing. Burkhard Lewerich, CFDnetwork
MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS
 Journal of Engineering Studies and Research Volume 16 (2010) No. 4 20 MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS LAPUSAN CIPRIAN *, MATIES VISTRIAN, BALAN RADU, HANCU OLIMPIU Technical
Journal of Engineering Studies and Research Volume 16 (2010) No. 4 20 MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS LAPUSAN CIPRIAN *, MATIES VISTRIAN, BALAN RADU, HANCU OLIMPIU Technical
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Consistent Simulation Environment with FMI based Tool Chain
 Consistent Simulation Environment with FMI based Tool Chain Edo Drenth 1, Mikael Törmänen 2, Krister Johansson 2, Bengt-Arne Andersson 1,Daniel Andersson 1, Ivar Torstensson 1, Johan Åkesson 1 1 Modelon
Consistent Simulation Environment with FMI based Tool Chain Edo Drenth 1, Mikael Törmänen 2, Krister Johansson 2, Bengt-Arne Andersson 1,Daniel Andersson 1, Ivar Torstensson 1, Johan Åkesson 1 1 Modelon
VT System Smart HIL Testing
 VT System Smart HIL Testing V1.0 2010-06-04 Agenda > ECU Testing Testing a Door Control Unit Summary and Outlook Slide: 2 ECU Testing I/O Access for ECU Testing ECU has to be tested in its natural environment
VT System Smart HIL Testing V1.0 2010-06-04 Agenda > ECU Testing Testing a Door Control Unit Summary and Outlook Slide: 2 ECU Testing I/O Access for ECU Testing ECU has to be tested in its natural environment
Virtual Temperature Cycle Test (TCT) for validation of indirect Charge Air Coolers and Exhaust Gas Recirculation Coolers
 for validation of indirect Charge Air Coolers and Exhaust Gas Recirculation Coolers") Virtual Temperature Cycle Test (TCT) for validation of indirect Charge Air Coolers and Exhaust Gas Recirculation Coolers STAR Global Conference 2014 Vienna, March 17-19 G. Apostolopoulos, R. Stauch, C.
Virtual Temperature Cycle Test (TCT) for validation of indirect Charge Air Coolers and Exhaust Gas Recirculation Coolers STAR Global Conference 2014 Vienna, March 17-19 G. Apostolopoulos, R. Stauch, C.
SURFACE VEHICLE RECOMMENDED PRACTICE
 400 Commonwealth Drive, Warrendale, PA 15096-0001 SURFACE VEHICLE RECOMMENDED PRACTICE An American National Standard J1979 Issued 1991-12 Revised 1997-09 Superseding J1979 JUL96 REV. SEP97 E/E DIAGNOSTIC
400 Commonwealth Drive, Warrendale, PA 15096-0001 SURFACE VEHICLE RECOMMENDED PRACTICE An American National Standard J1979 Issued 1991-12 Revised 1997-09 Superseding J1979 JUL96 REV. SEP97 E/E DIAGNOSTIC
Lab 4: QET DCMCT Speed Control with a PI Controller
 EGR 431 Control Systems Lab 4: QET DCMCT Speed Control with a PI Controller Prepared for: Dr. Ni Christopher Parisi College of Engineering California Baptist University 03/23/12 TABLE OF CONTENTS Introduction...............................................................
EGR 431 Control Systems Lab 4: QET DCMCT Speed Control with a PI Controller Prepared for: Dr. Ni Christopher Parisi College of Engineering California Baptist University 03/23/12 TABLE OF CONTENTS Introduction...............................................................
Robotics: Science and Systems
 Robotics: Science and Systems Model Predictive Control (MPC) Zhibin Li School of Informatics University of Edinburgh Content Concepts of MPC MPC formulation Objective function and constraints Solving the
Robotics: Science and Systems Model Predictive Control (MPC) Zhibin Li School of Informatics University of Edinburgh Content Concepts of MPC MPC formulation Objective function and constraints Solving the
Adaptive QoS Control Beyond Embedded Systems
 Adaptive QoS Control Beyond Embedded Systems Chenyang Lu! CSE 520S! Outline! Control-theoretic Framework! Service delay control on Web servers! On-line data migration in storage servers! ControlWare: adaptive
Adaptive QoS Control Beyond Embedded Systems Chenyang Lu! CSE 520S! Outline! Control-theoretic Framework! Service delay control on Web servers! On-line data migration in storage servers! ControlWare: adaptive
Operation manual for
 Operation manual for DFO/DFI-36/80/150/240/270/480 PLEASE READ THIS MANUAL CAREFULLY BEFORE OPERATION Hagavish st. Israel 58817 Tel: 972 3 5595252, Fax: 972 3 5594529 mrc@mrclab.com MRC.1.17 CONTROLS AND
Operation manual for DFO/DFI-36/80/150/240/270/480 PLEASE READ THIS MANUAL CAREFULLY BEFORE OPERATION Hagavish st. Israel 58817 Tel: 972 3 5595252, Fax: 972 3 5594529 mrc@mrclab.com MRC.1.17 CONTROLS AND
PORTFOLIO APPROACH BENEFITS AT A GLANCE SIMULATION SOLUTIONS TEST SYSTEM SOLUTIONS TESTING EQUIPMENT. TESTING Battery EQUIPMENT SIMULATION TOOLS
 SIMULATION SOLUTIONS TEST SYSTEM SOLUTIONS Electrification TESTING Battery EQUIPMENT E-Motor SIMULATION Power Electronics TOOLS Component TESTING TOOLS MBD Testbed on Automation the virtual testbed Powertrain
SIMULATION SOLUTIONS TEST SYSTEM SOLUTIONS Electrification TESTING Battery EQUIPMENT E-Motor SIMULATION Power Electronics TOOLS Component TESTING TOOLS MBD Testbed on Automation the virtual testbed Powertrain
Real-Time Hardware-In-Loop simulation for automated validation of diagnostic services
 Speakers Information- Controls, Measurement & Calibration Congress Real-Time Hardware-In-Loop simulation for automated validation of diagnostic services Charu Garg, Amit Kumar, Ajay Kumar Vashisth ABSTRACT
Speakers Information- Controls, Measurement & Calibration Congress Real-Time Hardware-In-Loop simulation for automated validation of diagnostic services Charu Garg, Amit Kumar, Ajay Kumar Vashisth ABSTRACT
CFD Project Workflow Guide
 CFD Project Workflow Guide Contents Select a problem with known results for proof-of-concept testing... 1 Set up and run a coarse test case... 2 Select and calibrate numerical methods... 3 Minimize & quantify
CFD Project Workflow Guide Contents Select a problem with known results for proof-of-concept testing... 1 Set up and run a coarse test case... 2 Select and calibrate numerical methods... 3 Minimize & quantify
MotoHawk support for ISO 15765
 MotoHawk support for ISO 15765 The Woodward Custom ISO15765 Blockset provides a MotoHawk application with an interface to a PC-based diagnostics application or a scan tool. What is ISO 15765? ISO 15765
MotoHawk support for ISO 15765 The Woodward Custom ISO15765 Blockset provides a MotoHawk application with an interface to a PC-based diagnostics application or a scan tool. What is ISO 15765? ISO 15765
Needless Torque Calibrations
 Needless Torque Calibrations Basic Instructions for Export/Loading tunes and Datalogging. Note: These instructions will NOT cover COM port setup or general PC skills Basic custom tune instructions: Predator/Trinity
Needless Torque Calibrations Basic Instructions for Export/Loading tunes and Datalogging. Note: These instructions will NOT cover COM port setup or general PC skills Basic custom tune instructions: Predator/Trinity
novo AlphaTack Plus accurate tack measurements made simple
 AlphaTack Plus accurate tack measurements made simple Introduction The AlphaTack Plus instrument allows quick tack determination of printing inks with a high degree of accuracy and reproducibility. Due
AlphaTack Plus accurate tack measurements made simple Introduction The AlphaTack Plus instrument allows quick tack determination of printing inks with a high degree of accuracy and reproducibility. Due
Experimental Data and Training
 Modeling and Control of Dynamic Systems Experimental Data and Training Mihkel Pajusalu Alo Peets Tartu, 2008 1 Overview Experimental data Designing input signal Preparing data for modeling Training Criterion
Modeling and Control of Dynamic Systems Experimental Data and Training Mihkel Pajusalu Alo Peets Tartu, 2008 1 Overview Experimental data Designing input signal Preparing data for modeling Training Criterion
PID auto-tuning UNICOS MOC3O02, Feedback systems & Tuning
 PID auto-tuning UNICOS MOC3O02, Feedback systems & Tuning Enrique Blanco (CERN, EN/ICE) on behalf of the UNICOS team ICALEPCS'15 - Oct/15 E. Blanco - UNICOS Team (CERN) 1 Outline 1. Introduction 2. CERN
PID auto-tuning UNICOS MOC3O02, Feedback systems & Tuning Enrique Blanco (CERN, EN/ICE) on behalf of the UNICOS team ICALEPCS'15 - Oct/15 E. Blanco - UNICOS Team (CERN) 1 Outline 1. Introduction 2. CERN
Infinity V95 August 2014 Update Notes STOP! THIS PRODUCT HAS LEGAL RESTRICTIONS. READ THIS BEFORE INSTALLING/USING!
 Instruction Manual Instruction Manual Infinity V95 August 2014 Update Notes STOP! THIS PRODUCT HAS LEGAL RESTRICTIONS. READ THIS BEFORE INSTALLING/USING! THIS PRODUCT MAY BE USED SOLELY ON VEHICLES USED
Instruction Manual Instruction Manual Infinity V95 August 2014 Update Notes STOP! THIS PRODUCT HAS LEGAL RESTRICTIONS. READ THIS BEFORE INSTALLING/USING! THIS PRODUCT MAY BE USED SOLELY ON VEHICLES USED
Decoupling Test Cases from Real and Virtual Test Systems with ASAM HIL API
 Decoupling Test Cases from Real and Virtual Test Systems with ASAM HIL API Dr. Rainer Rasche, dspace GmbH Dr. Dietmar Neumerkel, Daimler AG Workshop der ASIM/GI-Fachgruppen Simulation technischer Systeme
Decoupling Test Cases from Real and Virtual Test Systems with ASAM HIL API Dr. Rainer Rasche, dspace GmbH Dr. Dietmar Neumerkel, Daimler AG Workshop der ASIM/GI-Fachgruppen Simulation technischer Systeme
XX. User manual
 User manual Pneumatic servo system designed for industrial and automotive environments. Integrated Staccato valves enable fast cylinder travel with high speed and precise position control. Document number:
User manual Pneumatic servo system designed for industrial and automotive environments. Integrated Staccato valves enable fast cylinder travel with high speed and precise position control. Document number:
Experimental Security Analysis of a Modern Automobile
 Experimental Security Analysis of a Modern Automobile Matthias Lange TU Berlin June 29th, 2010 Matthias Lange (TU Berlin) Experimental Security Analysis of a Modern Automobile June 29th, 2010 1 / 16 Paper
Experimental Security Analysis of a Modern Automobile Matthias Lange TU Berlin June 29th, 2010 Matthias Lange (TU Berlin) Experimental Security Analysis of a Modern Automobile June 29th, 2010 1 / 16 Paper
NOISE PROPAGATION FROM VIBRATING STRUCTURES
 NOISE PROPAGATION FROM VIBRATING STRUCTURES Abstract R. Helfrich, M. Spriegel (INTES GmbH, Germany) Noise and noise exposure are becoming more important in product development due to environmental legislation.
NOISE PROPAGATION FROM VIBRATING STRUCTURES Abstract R. Helfrich, M. Spriegel (INTES GmbH, Germany) Noise and noise exposure are becoming more important in product development due to environmental legislation.
Using Cost Effective Distributed HIL for Rapid Prototyping
 Using Cost Effective Distributed HIL for Rapid Prototyping Renesas Electronics America Inc. Enabling Smart Solutions Embedded Control Systems need Hardware-in-Loop Simulation 2 Innovation using HIL Simulation
Using Cost Effective Distributed HIL for Rapid Prototyping Renesas Electronics America Inc. Enabling Smart Solutions Embedded Control Systems need Hardware-in-Loop Simulation 2 Innovation using HIL Simulation
Model Based Engine Map Adaptation Using EKF
 Model Based Engine Map Adaptation Using EKF Erik Höckerdal,, Erik Frisk, and Lars Eriksson Department of Electrical Engineering, Linköpings universitet, Sweden, {hockerdal,frisk,larer}@isy.liu.se Scania
Model Based Engine Map Adaptation Using EKF Erik Höckerdal,, Erik Frisk, and Lars Eriksson Department of Electrical Engineering, Linköpings universitet, Sweden, {hockerdal,frisk,larer}@isy.liu.se Scania
CHAPTER 3 INTELLIGENT FUZZY LOGIC CONTROLLER
 38 CHAPTER 3 INTELLIGENT FUZZY LOGIC CONTROLLER 3.1 INTRODUCTION The lack of intelligence, learning and adaptation capability in the control methods discussed in general control scheme, revealed the need
38 CHAPTER 3 INTELLIGENT FUZZY LOGIC CONTROLLER 3.1 INTRODUCTION The lack of intelligence, learning and adaptation capability in the control methods discussed in general control scheme, revealed the need
Electronic SUNSTAR & 传感与控制 Software TEL: FAX: KiBox To Go Measurement and Ev
 Electronic SUNSTAR & 传感与控制 Software http://www.sensor-ic.com/ TEL:0755-83376549 KiBox To Go Measurement and Evaluation System for Combustion Analysis in Test Vehicles with KiBox Cockpit Software The KiBox
Electronic SUNSTAR & 传感与控制 Software http://www.sensor-ic.com/ TEL:0755-83376549 KiBox To Go Measurement and Evaluation System for Combustion Analysis in Test Vehicles with KiBox Cockpit Software The KiBox
MECHATRONICS. William Bolton. Sixth Edition ELECTRONIC CONTROL SYSTEMS ENGINEERING IN MECHANICAL AND ELECTRICAL PEARSON
 MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
Collaborating in California Dynamic Skip Fire Development Using HIL API
 Collaborating in California Dynamic Skip Fire Development Using HIL API 7th ASAM US-Workshop, Oct. 29, 2014, Novi, MI, USA Hartmut Jürgens, dspace GmbH Paul Liu, Tula Technology, Inc. Preface The ASAM
Collaborating in California Dynamic Skip Fire Development Using HIL API 7th ASAM US-Workshop, Oct. 29, 2014, Novi, MI, USA Hartmut Jürgens, dspace GmbH Paul Liu, Tula Technology, Inc. Preface The ASAM
Ch 5 Industrial Control Systems
 Ch 5 Industrial Control Systems Sections: 1. Process Industries vs. Discrete Manufacturing Industries 2. Continuous vs. Discrete Control 3. Computer Process Control Industrial Control - Defined The automatic
Ch 5 Industrial Control Systems Sections: 1. Process Industries vs. Discrete Manufacturing Industries 2. Continuous vs. Discrete Control 3. Computer Process Control Industrial Control - Defined The automatic
Contents. 1 CoreTech System Co., Ltd.
 Contents Advanced Support for Intelligent Workflow Improved User Interface 2 Expanded Gate Types.. 2 Enhanced Runner Wizard. 2 Customized Cooling Channel Templates. 3 Parameterized Mesh Generator... 3
Contents Advanced Support for Intelligent Workflow Improved User Interface 2 Expanded Gate Types.. 2 Enhanced Runner Wizard. 2 Customized Cooling Channel Templates. 3 Parameterized Mesh Generator... 3
An Integrated Platform for Increased FLEXIbility in smart TRANSmission grids with STORage Entities and large penetration of Renewable Energy Sources
 An Integrated Platform for Increased FLEXIbility in smart TRANSmission grids with STORage Entities and large penetration of Renewable Energy Sources Project presentation This project has received funding
An Integrated Platform for Increased FLEXIbility in smart TRANSmission grids with STORage Entities and large penetration of Renewable Energy Sources Project presentation This project has received funding
R7426D UNIVERSAL INPUT CONTROLLER. MicroniK 200 FEATURES GENERAL. Order Numbers SPECIFICATION DATA
 MicroniK 2 R7426D UNIVERSAL INPUT CONTROLLER FEATURES SPECIFICATION DATA Microcontroller design based on modern digital technology User interface with LC-display, 4 push-buttons, and a CPA control potentiometer
MicroniK 2 R7426D UNIVERSAL INPUT CONTROLLER FEATURES SPECIFICATION DATA Microcontroller design based on modern digital technology User interface with LC-display, 4 push-buttons, and a CPA control potentiometer
Identification of process phenomena in DMLS by optical inprocess
 Lasers in Manufacturing Conference 2015 Identification of process phenomena in DMLS by optical inprocess monitoring R. Domröse a, *, T. Grünberger b a EOS GmbH Electro Optical Systems, Robert-Stirling-Ring
Lasers in Manufacturing Conference 2015 Identification of process phenomena in DMLS by optical inprocess monitoring R. Domröse a, *, T. Grünberger b a EOS GmbH Electro Optical Systems, Robert-Stirling-Ring
ETAS ASCMO 5.2 Release Notes. Release Notes. Page 1 of 12
 Page 1 of 12 Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to this document. The
Page 1 of 12 Copyright The data in this document may not be altered or amended without special notification from ETAS GmbH. ETAS GmbH undertakes no further obligation in relation to this document. The
Preferences in Evolutionary Multi-Objective Optimisation with Noisy Fitness Functions: Hardware in the Loop Study
 Proceedings of the International Multiconference on ISSN 1896-7094 Computer Science and Information Technology, pp. 337 346 2007 PIPS Preferences in Evolutionary Multi-Objective Optimisation with Noisy
Proceedings of the International Multiconference on ISSN 1896-7094 Computer Science and Information Technology, pp. 337 346 2007 PIPS Preferences in Evolutionary Multi-Objective Optimisation with Noisy
Control System Electronics
 Excellence in mobile controllers and measurement technologies Control System Electronics Control System Electronics 03-06 FREELY PROGRAMMABLE CONTROLLERS 07 I/O MODULES 08 TELESERVICE 09 SOFTWARE 10 OTHER
Excellence in mobile controllers and measurement technologies Control System Electronics Control System Electronics 03-06 FREELY PROGRAMMABLE CONTROLLERS 07 I/O MODULES 08 TELESERVICE 09 SOFTWARE 10 OTHER
Machine Learning Applications for Data Center Optimization
 Machine Learning Applications for Data Center Optimization Jim Gao, Google Ratnesh Jamidar Indian Institute of Technology, Kanpur October 27, 2014 Outline Introduction Methodology General Background Model
Machine Learning Applications for Data Center Optimization Jim Gao, Google Ratnesh Jamidar Indian Institute of Technology, Kanpur October 27, 2014 Outline Introduction Methodology General Background Model
Analysis of low cycle fatigue considering geometric manufacturing tolerances
 presented at the 14th Weimar Optimization and Stochastic Days 2017 Source: www.dynardo.de/en/library Analysis of low cycle fatigue considering geometric manufacturing tolerances SIEMENS AG applies ANSYS,
presented at the 14th Weimar Optimization and Stochastic Days 2017 Source: www.dynardo.de/en/library Analysis of low cycle fatigue considering geometric manufacturing tolerances SIEMENS AG applies ANSYS,
Responsive Flight Software Development & Verification Techniques for Small Satellites
 Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Responsive Flight Software Development & Verification Techniques for Small Satellites Darren Rowen The Aerospace Corporation Vehicle Systems Division 9 November 2012 The Aerospace Corporation 2012 Overview
Simulation of Curtain Airbag with Arbitrary. Eulerian- Lagrangian Method
 Simulation of Curtain Airbag with Arbitrary Eulerian- Lagrangian Method Dmitri Fokin, Eivind Dessarud Altair Engineering Claes Ljungqvist Saab Automobile AB Abstract: Computer simulation is a powerful
Simulation of Curtain Airbag with Arbitrary Eulerian- Lagrangian Method Dmitri Fokin, Eivind Dessarud Altair Engineering Claes Ljungqvist Saab Automobile AB Abstract: Computer simulation is a powerful
Condition Monitoring of CNC Machining Using Adaptive Control
 International Journal of Automation and Computing 10(3), June 2013, 202-209 DOI: 10.1007/s11633-013-0713-1 Condition Monitoring of CNC Machining Using Adaptive Control B. Srinivasa Prasad D. Siva Prasad
International Journal of Automation and Computing 10(3), June 2013, 202-209 DOI: 10.1007/s11633-013-0713-1 Condition Monitoring of CNC Machining Using Adaptive Control B. Srinivasa Prasad D. Siva Prasad
News about ECU-TEST 7.0
 News about ECU-TEST 7.0 News about ECU-TEST 7.0 Dresden, 3 News about ECU-TEST 7.0 ECU-TEST: The Application ECU-TEST as 64-Bit-Solution Full-featured PDU-based bus access New test management connectors
News about ECU-TEST 7.0 News about ECU-TEST 7.0 Dresden, 3 News about ECU-TEST 7.0 ECU-TEST: The Application ECU-TEST as 64-Bit-Solution Full-featured PDU-based bus access New test management connectors
Variants and Traceability as the Challenge
 Variants and Traceability as the Challenge Model-Based Test Design as an Answer V1.0 2016-11-12 Motivation We are talking about automated ECU testing: Module tests, sub system tests, MIL, SIL, HIL Challenges
Variants and Traceability as the Challenge Model-Based Test Design as an Answer V1.0 2016-11-12 Motivation We are talking about automated ECU testing: Module tests, sub system tests, MIL, SIL, HIL Challenges
VALIDATION METHODOLOGY FOR SIMULATION SOFTWARE OF SHIP BEHAVIOUR IN EXTREME SEAS
 10 th International Conference 409 VALIDATION METHODOLOGY FOR SIMULATION SOFTWARE OF SHIP BEHAVIOUR IN EXTREME SEAS Stefan Grochowalski, Polish Register of Shipping, S.Grochowalski@prs.pl Jan Jankowski,
10 th International Conference 409 VALIDATION METHODOLOGY FOR SIMULATION SOFTWARE OF SHIP BEHAVIOUR IN EXTREME SEAS Stefan Grochowalski, Polish Register of Shipping, S.Grochowalski@prs.pl Jan Jankowski,
CHAPTER 4 FREQUENCY STABILIZATION USING FUZZY LOGIC CONTROLLER
 60 CHAPTER 4 FREQUENCY STABILIZATION USING FUZZY LOGIC CONTROLLER 4.1 INTRODUCTION Problems in the real world quite often turn out to be complex owing to an element of uncertainty either in the parameters
60 CHAPTER 4 FREQUENCY STABILIZATION USING FUZZY LOGIC CONTROLLER 4.1 INTRODUCTION Problems in the real world quite often turn out to be complex owing to an element of uncertainty either in the parameters
Modeling, Simulation and Analysis of Integrated Building Energy and Control Systems. Michael Wetter. October 8, 2009
 Modeling, Simulation and Analysis of Integrated Building Energy and Control Systems Michael Wetter Simulation Research Group Building Technologies Department Energy and Environmental Technologies Division
Modeling, Simulation and Analysis of Integrated Building Energy and Control Systems Michael Wetter Simulation Research Group Building Technologies Department Energy and Environmental Technologies Division
Torque Control of a Diesel Engine by an Eigenpressure Based Approach
 213 European Control Conference (ECC) July 17-19, 213, Zürich, Switzerland. Torque Control of a Diesel Engine by an Eigenpressure Based Approach Dominik Moser, Sebastian Hahn, Harald Waschl and Luigi del
213 European Control Conference (ECC) July 17-19, 213, Zürich, Switzerland. Torque Control of a Diesel Engine by an Eigenpressure Based Approach Dominik Moser, Sebastian Hahn, Harald Waschl and Luigi del
Explicit MPC in Mechatronics Industry:
 European Control Conference, July 8 th, 23 Zurich, CH MITSUBISHI ELECTRIC RESEARCH LABORATORIES Cambridge, Massachusetts Explicit MPC in Mechatronics Industry: Technology Transfer Potential and Limitations
European Control Conference, July 8 th, 23 Zurich, CH MITSUBISHI ELECTRIC RESEARCH LABORATORIES Cambridge, Massachusetts Explicit MPC in Mechatronics Industry: Technology Transfer Potential and Limitations
QUICK START. ATEQ F620 Version 1.0. Reference: MR-28300A-U. (Photo no contractual)
") QUICK START ATEQ F620 Version 1.0 (Photo no contractual) Reference: MR-28300A-U REVISIONS OF THE ATEQ F620 USER MANUAL Due to continuing improvements, the information contained in this user manual, the
QUICK START ATEQ F620 Version 1.0 (Photo no contractual) Reference: MR-28300A-U REVISIONS OF THE ATEQ F620 USER MANUAL Due to continuing improvements, the information contained in this user manual, the
OTX Open Diagnostic Data exchange
 OTX Open Diagnostic Data exchange 2 Standardized in the ISO 13209 Platform and tester independent exchange format for the formal description of test sequences Application areas: Vehicle diagnostics e.g.
OTX Open Diagnostic Data exchange 2 Standardized in the ISO 13209 Platform and tester independent exchange format for the formal description of test sequences Application areas: Vehicle diagnostics e.g.
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel
 Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
THE DRBIII FLASH FILES FOR THIS BULLETIN ARE AVAILABLE VIA THE INTERNET. THE DRBIII FLASH FILES FOR THIS BULLETIN ARE AVAILABLE ON DealerCONNECT.
 NUMBER: 18-018-05 GROUP: Vehicle Performance DATE: May 06, 2005 This bulletin is supplied as technical information only and is not an authorization for repair. No part of this publication may be reproduced,
NUMBER: 18-018-05 GROUP: Vehicle Performance DATE: May 06, 2005 This bulletin is supplied as technical information only and is not an authorization for repair. No part of this publication may be reproduced,
Design and Verification of Motion Control Algorithms Using Simulation
 Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
mobydic 4910 Multiprotocol ECU Simulator v1.01 Features
 Features Simulates a single or 4 different ECU's ( PCM,TCM,HEC,ABS) Selectable protocol via dip switch Selectable Gasoline / Diesel PID's Advanced monitoring / Readiness functions Generates DTC for each
Features Simulates a single or 4 different ECU's ( PCM,TCM,HEC,ABS) Selectable protocol via dip switch Selectable Gasoline / Diesel PID's Advanced monitoring / Readiness functions Generates DTC for each