EFFICIENT BAYESIAN INFERENCE USING FULLY CONNECTED CONDITIONAL RANDOM FIELDS WITH STOCHASTIC CLIQUES. M. J. Shafiee, A. Wong, P. Siva, P.
|
|
|
- Chrystal Walker
- 5 years ago
- Views:
Transcription


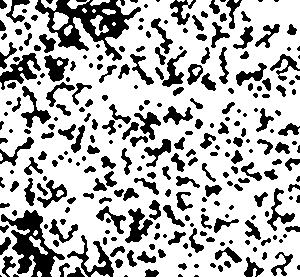
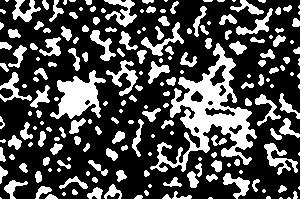
1 EFFICIENT BAYESIAN INFERENCE USING FULLY CONNECTED CONDITIONAL RANDOM FIELDS WITH STOCHASTIC CLIQUES M. J. Shafiee, A. Wong, P. Siva, P. Fieguth Vision & Image Processing Lab, System Design Engineering Dept., University of Waterloo {mjshafie, a28wong, psiva, ABSTRACT Conditional random fields (CRFs) are one of the most powerful frameworks in image modeling. However practical CRFs typically have edges only between nearby nodes; using more interactions and expressive relations among nodes make these methods impractical for large-scale applications, due to the high computational complexity. Recent work has shown that fully connected CRFs can be tractable by defining specific potential functions. In this paper, we present a novel framework to tackle the computational complexity of a fully connected graph without requiring specific potential functions. Instead, inspired by random graph theory and sampling methods, we propose a new clique structure called stochastic cliques. The stochastically fully connected CRF (SFCRF) is a marriage between random graphs and random fields, benefiting from the advantages of fully connected graphs while maintaining computational tractability. The effectiveness of SFCRF was examined by binary image labeling of highly noisy images. The results show that the proposed framework outperforms an adjacency CRF and a CRF with a large neighborhood size. Index Terms Conditional Random Fields, Random Graph, Stochastic Clique, Stochastically Fully Connected Random Fields 1. INTRODUCTION Structural learning is a well-known approach in computer vision. Simple methods like naïve Bayes, to complex methods like Markov random fields (MRFs), have made strong contributions to computer vision challenges such as image denoising, segmentation, image labeling and super resolution [1, 2, 3]. These algorithms can be illustrated from two different points of view: 1. Based on their probabilistic formulations and associated parameters, and This work was supported by the Natural Sciences and Engineering Research Council of Canada, Ontario Ministry of Economic Development and Innovation and Canada Research Chairs Program. (a) True image (b) Observation (c) Label map Fig. 1. SFCRF binary label classification result. The goal is to label the observed, noisy image into foreground and background. Here the given image is distorted with 90% salt & pepper noise, however the SFCRF still produces an accurate label map. 2. Based on the representation of their graphical models [4]. The graphical models are of interest here; these are divided into directed and undirected graphs, however it is the undirected graphical models which are more appropriate in image modeling. MRFs are the most common undirected graphical model used in computer vision. The MRFs assert an assumption of conditional independence of states on measurements. In contrast, the conditional random field proposed by Lafferty et al. [5] relaxes this assumption by explicitly modeling the conditional dependence of the states on the measurements. The impact of CRFs has been investigated in [6, 7, 8]. Basic CRF models utilize unary and pairwise potentials on local neighborhoods. These adjacency CRFs lead to smoothed image boundaries because they are not able to capture the long range relations among nodes, thus a number of methods have been proposed to capture such non-local relations. The basic CRF framework was expanded to incorporate non-local relations through hierarchical connectivity [9]. Similarly, fully connected CRFs frameworks were proposed for semantic image labeling[10]. However, the complexity of inference in those models limits the usage of them to hundreds nodes or fewer. Krähenbühl and Koltun [2] proposed a tractable inference procedure based on specific potential functions. They modeled the multi-class image segmentation based on a fully connected CRF, and the edge potentials were obtained using Gaussian kernels. Based on these new feature functions, they
2 formulated the inference as a filtering problem. Following this method, Zhang and Chen [11] relaxed the Gaussian assumption to any distribution by using a stationary constraint. They showed that the spatial potentials over two pixels depend only on their relative positions. Therefore, they could encode more statistics by different distribution. Champbell et. al. [12] generalized the pairwise potentials to a non-linear dissimilarity measure. They presented the pairwise terms as density estimates of the conditional probability, and the probabilities were expressed by a dissimilarity measure. Ristovski et al. [13] proposed new continuous CRF on a fully connected graph. Their framework is similar to [2] but they targeted the regression problems with continuous outputs. The aforementioned methods try to reduce the O(N 3 ) computational complexity of exact inference on a fully connected graph by approximation algorithms and filterbased frameworks. They addressed the problem by defining specific potential functions to manage the inference as a filtering approach. However using specific feature functions limits the effectiveness of CRF in modeling, as the one strengths of the CRF is the selection of arbitrary feature functions. In this work, we propose a novel CRF framework on a fully connected graph. Inspired by Monte Carlo sampling, we propose a new stochastic clique structure, which allows the computational complexity of the fully connected graph to be reduced without limiting the CRF with specific feature functions. Because of this flexibility, the new framework preserves the merits of the standard CRF, as any arbitrary function can be selected as the potential function. The proposed stochastically fully connected random fields (SFCRF) is a mixture between random graph theory [14] and random fields theory, sampling the fully connected random field while allowing for computational tractability. An illustration of the proposed SFCRF for binary labeling is shown in Figure METHODOLOGY Stochastically fully connected conditional random fields (SFCRFs) are fully connected random fields in which cliques are defined stochastically. The term fully connected refers to the fact that each node in the graph is connected to all other nodes of the graph, however the cliques for each node are determined based on distribution probabilities, so the number of pairwise cliques in the graph may not be the same as the number of neighborhood pairs. The goal is to model P (Y X), the conditional probability of the state set Y given the measurement X. The conditional random field (CRF) approach to expressing P (Y X) is to write it as P (Y X) = 1 exp( ψ(y X)) (1) Z(X) where Z(X) is the partition function and ψ(.) is some combination of unary and pairwise potential functions: ψ(y X) = n i=1 ψ u (y i, X) + ϕ C ψ p (y ϕ, X) (2) Here y i Y is a single state in the set Y = {y i } n i=1, y ϕ Y is the subset of states (clique), and X = {x j } n j=1 is the set of observations. Each node i has a set of neighbors { } N(i) = j j = 1 : n, j i (3) where N(i) = n 1. The specified clique structure C is, in this paper, taken to be the pairwise clique { } n C = C p (i) (4) i=1 } C p (i) = {(i, j) j N(i), 1 S {i,j} = 1 (5) although the formulation can be generalized for other clique structures. C p (i) for node i is determined based upon a stochastic indicator neighbor function, 1 S {i,j} = 1, to distinguish whether two nodes can construct a clique or not. This function itself is a combination of probability distributions. For image modeling, this function must consider the spatial relation among the nodes and must involve data driven into the model; therefore, the proposed indicator function is the combination of spatially driven and data driven probabilities: { 1 S {i,j} = 1 Pi,j s Qd i,j γ (6) 0 otherwise 1 S {i,j} = 1 has two responsibilities: 1. Incorporate the spatial information (P s i,j ) 2. Involve the data relation among the states (Q d i,j ) The threshold γ determines the sparsity of the graph. The potential function ψ u (.) and ψ p (.) from (2) are the combinations of unary and pairwise feature functions and their corresponding weights λ, respectively: ψ u (y i, X) = ψ p (y ϕ, X) = K λ u j f j (y i, X) (7) j=1 K {y i,y j} y ϕ,k=1 λ p k f k(y i, y j, X) (8) where the λ constants control the importance of each feature function in the energy formulation calculated in the training stage. Since the SFCRF is a generalization of the CRF, the various λ parameters can be tied [15] in some situations. Graph G(V, E) is the realization of the SFCRF where V is the set of nodes of the graph representing the states
3 for digits, 26 classes for upper case letters, and 26 classes for lower case letters. We corrupted the given images with noise, and the problem goal is to classify the pixels of the noisy images as foreground and background. Salt & pepper noise at 80% and 90%, and Gaussian noise at 220% and 300%, where the Gaussian noise percentage is characterised by ( % = σ dynamic range ) 100 (9) Fig. 2. A realization of a stochastically fully connected conditional random field graph. A connectivity between two nodes is determined based on a distribution; each two nodes in the graph can be connected according to a probability drawn from this distribution. There is a measurement x i corresponding to each node y i. The connectivity of each pair of two nodes y i and y k is distinguished by the edge e i,k. Closer nodes are connected with a higher probability (black solid edges), whereas two nodes with a greater separation are less probable to be connected (red dashed edges). Y = {y i } n i=1, and the E is the set of edges of the graph with E n(n+1) 2. Corresponding to each vertex in the graph G(.) there is an observation x i X. The edges in G(.) are randomly sampled, thus G is a realization of a random graph [14]. Based on the Erdös-Rényi theorem [14] if the probability p log n of the random graph Ĝn,p is greater than n the graph is connected with a high probability. As a result, the proposed graph G(.) is connected, has at least n 1 edges even for large values of γ, and satisfies a Gibbs distribution [16]. Figure 2 illustrates an example of a SFCRF. As can be seen, each node in the graph can be connected to all other nodes, although to improve visualization the connectivities of the centered node are highlighted. The probability of connecting two nodes as a clique is different for each pair of nodes. According to Pi,j s, the connectedness probability of two nodes and the distance between them have inverse relation. However, there is a possibility for two distantly separated nodes y i and y k to be connected, as illustrated in Figure 2, which is how the SFCRF takes advantageous of the fully connected CRF. By the amalgamation of random graph theory and random fields theory, the proposed SFCRF provides the merits of fully connected random fields by sampling the configuration of a fully connected random fields, leading to a much smaller computational complexity than that of fully connected random fields. 3. RESULTS & DISCUSSION To demonstrate the power of the SFCRF we performed experiments on binary classification datasets. The first dataset is EnglishHnd, a set of handwritten characters [17], containing 3410 images grouped into 62 equally sized classes: 10 classes The images have a size of ; therefore, the total number of pairwise connections of the fully connected graph is approximately According to the random graph theory [14] mentioned earlier, the selection probability must be greater than for the graph to be connected. We conducted the experiments with γ = , meaning that the selection probability is equal to , leading to an expected number of pairwise cliques to be with an average of 121 pairwise cliques per node. To test the effectiveness of the proposed framework, we compared our proposed SFCRF against two other CRFs of different neighborhood sizes. Of the two compared approaches, the first is a regular CRF with adjacent neighbors (CRF-N3) where each node is connected to its closest eight neighbours (those within a 3 3 block); the second model, CRF-N11, has a larger neighborhood, where each node is connected to its closest 120 neighbors (those within an block). The exact number of pairwise cliques of CRF-N3 is (8 pairwise cliques per node) and of CRF-N11 is (120 pairwise cliques per node). All experiments were conducted on an Intel Core 3.4 GHz. All three methods (CRF-N3, CRF-N11 and SFCRF) are implemented in Matlab, whereas the potential calculation was computed in C++ code integrated with Matlab through the Mex interface. The average computational time for each iteration of the inference step is 0.04s for CRF- N3 and 3.85s for CRF-N11, a significant difference caused by the change in degree of connectivity between the two models. In contrast, the average runtime per iteration for the SFCRF configuration is 2.7s. Thus the inference time is decreased, while the flexibility in edge connectivity, in principle allowing arbitrarily distant connections, is increased based on this new clique structure. Table 1 shows the F1-score for the SFCRF and other CRFs subject to the stated noise. The ground truth labels are obtained by binarizing the true images manually. The results in the table show that the proposed SFCRF outperforms the regular CRFs in all cases. Figure 3 shows some results based on data from the EnglishHnd dataset. It is shown that SFCRF can classify the images even when they are distorted by the high level of the noise (i.e. 300%). The SFCRFs are also examined with grayscale images from the Weizmann segmentation dataset [18]. The goal is to segment the noisy images into foreground and background.

 (2) (3) (4) (5) (6)")




![EnglishHnd dataset [17].](/docs-images/81/83612868/images/4-8.jpg "The proposed framework is examined by")

 and a CRF with a")



 0.235 0.313 0.")
 0.391 0.646 0.")











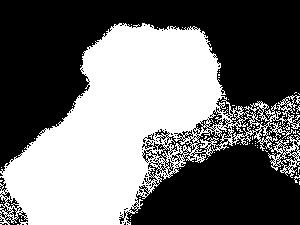


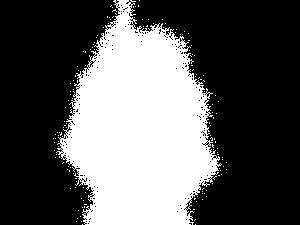

4 True Image S&P 80% S&P 90% Gauss 220% Gauss 300% S&P 80% S&P 90% Gauss 220% Gauss 300% SFCRF CRF-N11 CRF-N3 Observation (1) (2) (3) (4) (5) (6) (7) (8) Fig. 3. Qualitative results of SFCRF; the proposed algorithm is examined based on two noise types with two strengths. The results clearly show how the SFCRF outperforms both local and non-local CRFs. Table 1. Quantitative results based on the EnglishHnd dataset [17]. The proposed framework is examined by two noise types with two different levels. The SFCRF is compared with the regular CRF (CRF-N3) and a CRF with a neighborhood size of 11 (CRF-N11). The per-iteration run time of each method is reported; all methods were run with an equal number of iterations. CRF-N3 CRF-N11 SFCRF Salt & Pepper (80%) Salt & Pepper (90%) Gaussian (220%) Gaussian (300%) Time per Iteration (s) Figure 4 shows the segmentation results of SFCRFs for noisy images in comparison with CRF-N11. The images are distorted with a high level of noise to the point that the objects are not obvious in the images. The results demonstrate that SFCRFs can detect the object in low SNR images. SFCRF CRF-N11 CRF-N3 Observation True Image (F 1 = 0.427) (F 1 = 0.699) (F 1 = 0.707) (F 1 = 0.817) (F 1 = 0.512) (F 1 = 0.920) (F 1 = 0.829) (F 1 = 0.937) (F 1 = 0.911) (F 1 = 0.957) (F 1 = 0.914) (F 1 = 0.968) 4. CONCLUSION & FUTURE WORK In this paper we proposed a new framework of fully connected conditional random fields with a tractable computational inference stage by incorporating a novel stochastic clique structure. Through the stochastic clique, the dense graph structure is converted to a sparse one, significantly reducing the computational complexity while preserving the effectiveness of a fully connected random field. Results show that the proposed approach performs well for image labelling. Fig. 4. The effectiveness of the SFCRF in the segmentation of noisy images from the Weizmann dataset. The first row shows the true images, the second the images after distortion, and the three last rows the segmentation results of the CRF-N3, CRF- N11 and the SFCRF respectively. The images are distorted with salt & pepper noise at 90%. The corresponding F1-score for each result is shown after the image. The results clearly illustrate the applicability of the SFCRF to natural images.
5 5. REFERENCES [1] M. Malfait and D. Roose, Wavelet-based image denoising using a markov random field a priori model, IEEE Transactions on Image Processing, [2] P. Krähenbühl and V. Koltun, Efficient inference in fully connected crfs with gaussian edge potentials, in Advances in Neural Information Processing Systems, [3] D. Kong, M. Han, W. Xu, H. Tao, and Y. Gong, A conditional random field model for video super-resolution, in International Conference on Pattern Recognition. IE- EE, [4] M. Wainwright and M. Jordan, Graphical models, exponential families, and variational inference, Foundations and Trends in Machine Learning, [5] J. Lafferty, A. McCallum, and F. Pereira, Conditional random fields: Probabilistic models for segmenting and labeling sequence data, in International Conference on Machine Learning, [6] F. Sha and F. Pereira, Shallow parsing with conditional random fields, in North American Chapter of the Association for Computational Linguistics on Human Language Technology. Association for Computational Linguistics, [13] K. Ristovski, V. Radosavljevic, S. Vucetic, and Z. Obradovic, Continuous conditional random fields for efficient regression in large fully connected graphs, in Twenty-Seventh AAAI Conference on Artificial Intelligence, [14] P. Erdos and A. Renyi, On random graphs i., Publ. Math. Debrecen, [15] C. Sutton and A. McCallum, An introduction to conditional random fields for relational learning, Introduction to statistical relational learning, [16] S. Geman and D. Geman, Stochastic relaxation, gibbs distributions, and the bayesian restoration of images, IEEE Transactions on Pattern Analysis and Machine Intelligence, [17] T. de Campos, B. Babu, and M. Varma, Character recognition in natural images, in International Conference on Computer Vision Theory and Applications, [18] A. Sharon, G. Meirav, B. Ronen, and B. Achi, Image segmentation by probabilistic bottom-up aggregation and cue integration, in Conference on Computer Vision and Pattern Recognition. IEEE, [7] H. Zhao, C. Huang, M. Li, and B. Lu, Effective tag set selection in chinese word segmentation via conditional random field modeling, in Proceedings of PACLIC, [8] X. He, R. Zemel, and M. Carreira-Perpinan, Multiscale conditional random fields for image labeling, in Conference on Computer Vision and Pattern Recognition. IEEE, [9] P. Kohli, P. Torr, et al., Robust higher order potentials for enforcing label consistency, International Journal of Computer Vision, [10] A. Rabinovich, A. Vedaldi, C. Galleguillos, E. Wiewiora, and S. Belongie, Objects in context, in International Conference on Computer Vision. IEEE, [11] Y. Zhang and T. Chen, Efficient inference for fullyconnected crfs with stationarity, in Conference on Computer Vision and Pattern Recognition. IEEE, [12] N. Campbell, K. Subr, and J. Kautz, Fully-connected crfs with non-parametric pairwise potentials, in Conference on Computer Vision and Pattern Recognition. IE- EE, 2013.
IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS
 IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS M. J. Shafiee, A. G. Chung, A. Wong, and P. Fieguth Vision & Image Processing Lab, Systems
IMPROVED FINE STRUCTURE MODELING VIA GUIDED STOCHASTIC CLIQUE FORMATION IN FULLY CONNECTED CONDITIONAL RANDOM FIELDS M. J. Shafiee, A. G. Chung, A. Wong, and P. Fieguth Vision & Image Processing Lab, Systems
Undirected Graphical Models. Raul Queiroz Feitosa
 Undirected Graphical Models Raul Queiroz Feitosa Pros and Cons Advantages of UGMs over DGMs UGMs are more natural for some domains (e.g. context-dependent entities) Discriminative UGMs (CRF) are better
Undirected Graphical Models Raul Queiroz Feitosa Pros and Cons Advantages of UGMs over DGMs UGMs are more natural for some domains (e.g. context-dependent entities) Discriminative UGMs (CRF) are better
Fully-Connected CRFs with Non-Parametric Pairwise Potentials
 Fully-Connected CRFs with Non-Parametric Pairwise Potentials Neill D. F. Campbell University College London Kartic Subr University College London Jan Kautz University College London Abstract Conditional
Fully-Connected CRFs with Non-Parametric Pairwise Potentials Neill D. F. Campbell University College London Kartic Subr University College London Jan Kautz University College London Abstract Conditional
Markov Random Fields and Gibbs Sampling for Image Denoising
 Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
Markov Random Fields and Gibbs Sampling for Image Denoising Chang Yue Electrical Engineering Stanford University changyue@stanfoed.edu Abstract This project applies Gibbs Sampling based on different Markov
Conditional Random Fields as Recurrent Neural Networks
 BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
Image Restoration using Markov Random Fields
 Image Restoration using Markov Random Fields Based on the paper Stochastic Relaxation, Gibbs Distributions and Bayesian Restoration of Images, PAMI, 1984, Geman and Geman. and the book Markov Random Field
Image Restoration using Markov Random Fields Based on the paper Stochastic Relaxation, Gibbs Distributions and Bayesian Restoration of Images, PAMI, 1984, Geman and Geman. and the book Markov Random Field
Efficient Feature Learning Using Perturb-and-MAP
 Efficient Feature Learning Using Perturb-and-MAP Ke Li, Kevin Swersky, Richard Zemel Dept. of Computer Science, University of Toronto {keli,kswersky,zemel}@cs.toronto.edu Abstract Perturb-and-MAP [1] is
Efficient Feature Learning Using Perturb-and-MAP Ke Li, Kevin Swersky, Richard Zemel Dept. of Computer Science, University of Toronto {keli,kswersky,zemel}@cs.toronto.edu Abstract Perturb-and-MAP [1] is
CRFs for Image Classification
 CRFs for Image Classification Devi Parikh and Dhruv Batra Carnegie Mellon University Pittsburgh, PA 15213 {dparikh,dbatra}@ece.cmu.edu Abstract We use Conditional Random Fields (CRFs) to classify regions
CRFs for Image Classification Devi Parikh and Dhruv Batra Carnegie Mellon University Pittsburgh, PA 15213 {dparikh,dbatra}@ece.cmu.edu Abstract We use Conditional Random Fields (CRFs) to classify regions
Collective classification in network data
 1 / 50 Collective classification in network data Seminar on graphs, UCSB 2009 Outline 2 / 50 1 Problem 2 Methods Local methods Global methods 3 Experiments Outline 3 / 50 1 Problem 2 Methods Local methods
1 / 50 Collective classification in network data Seminar on graphs, UCSB 2009 Outline 2 / 50 1 Problem 2 Methods Local methods Global methods 3 Experiments Outline 3 / 50 1 Problem 2 Methods Local methods
Random projection for non-gaussian mixture models
 Random projection for non-gaussian mixture models Győző Gidófalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract Recently,
Random projection for non-gaussian mixture models Győző Gidófalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract Recently,
Exploiting Sparsity for Real Time Video Labelling
 2013 IEEE International Conference on Computer Vision Workshops Exploiting Sparsity for Real Time Video Labelling Lachlan Horne, Jose M. Alvarez, and Nick Barnes College of Engineering and Computer Science,
2013 IEEE International Conference on Computer Vision Workshops Exploiting Sparsity for Real Time Video Labelling Lachlan Horne, Jose M. Alvarez, and Nick Barnes College of Engineering and Computer Science,
Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision
 Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision Fuxin Li Slides and materials from Le Song, Tucker Hermans, Pawan Kumar, Carsten Rother, Peter Orchard, and others Recap:
Markov/Conditional Random Fields, Graph Cut, and applications in Computer Vision Fuxin Li Slides and materials from Le Song, Tucker Hermans, Pawan Kumar, Carsten Rother, Peter Orchard, and others Recap:
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Semantic Segmentation. Zhongang Qi
 Semantic Segmentation Zhongang Qi qiz@oregonstate.edu Semantic Segmentation "Two men riding on a bike in front of a building on the road. And there is a car." Idea: recognizing, understanding what's in
Semantic Segmentation Zhongang Qi qiz@oregonstate.edu Semantic Segmentation "Two men riding on a bike in front of a building on the road. And there is a car." Idea: recognizing, understanding what's in
Markov Networks in Computer Vision. Sargur Srihari
 Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Important application area for MNs 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Mesh segmentation. Florent Lafarge Inria Sophia Antipolis - Mediterranee
 Mesh segmentation Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline What is mesh segmentation? M = {V,E,F} is a mesh S is either V, E or F (usually F) A Segmentation is a set of sub-meshes
Mesh segmentation Florent Lafarge Inria Sophia Antipolis - Mediterranee Outline What is mesh segmentation? M = {V,E,F} is a mesh S is either V, E or F (usually F) A Segmentation is a set of sub-meshes
Detection of Man-made Structures in Natural Images
 Detection of Man-made Structures in Natural Images Tim Rees December 17, 2004 Abstract Object detection in images is a very active research topic in many disciplines. Probabilistic methods have been applied
Detection of Man-made Structures in Natural Images Tim Rees December 17, 2004 Abstract Object detection in images is a very active research topic in many disciplines. Probabilistic methods have been applied
Algorithms for Markov Random Fields in Computer Vision
 Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
Algorithms for Markov Random Fields in Computer Vision Dan Huttenlocher November, 2003 (Joint work with Pedro Felzenszwalb) Random Field Broadly applicable stochastic model Collection of n sites S Hidden
An ICA based Approach for Complex Color Scene Text Binarization
 An ICA based Approach for Complex Color Scene Text Binarization Siddharth Kherada IIIT-Hyderabad, India siddharth.kherada@research.iiit.ac.in Anoop M. Namboodiri IIIT-Hyderabad, India anoop@iiit.ac.in
An ICA based Approach for Complex Color Scene Text Binarization Siddharth Kherada IIIT-Hyderabad, India siddharth.kherada@research.iiit.ac.in Anoop M. Namboodiri IIIT-Hyderabad, India anoop@iiit.ac.in
Segmentation and labeling of documents using Conditional Random Fields
 Segmentation and labeling of documents using Conditional Random Fields Shravya Shetty, Harish Srinivasan, Matthew Beal and Sargur Srihari Center of Excellence for Document Analysis and Recognition (CEDAR)
Segmentation and labeling of documents using Conditional Random Fields Shravya Shetty, Harish Srinivasan, Matthew Beal and Sargur Srihari Center of Excellence for Document Analysis and Recognition (CEDAR)
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing
 Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Image Segmentation Using Iterated Graph Cuts Based on Multi-scale Smoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200,
Markov Networks in Computer Vision
 Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Markov Networks in Computer Vision Sargur Srihari srihari@cedar.buffalo.edu 1 Markov Networks for Computer Vision Some applications: 1. Image segmentation 2. Removal of blur/noise 3. Stereo reconstruction
Simultaneous Multi-class Pixel Labeling over Coherent Image Sets
 Simultaneous Multi-class Pixel Labeling over Coherent Image Sets Paul Rivera Research School of Computer Science Australian National University Canberra, ACT 0200 Stephen Gould Research School of Computer
Simultaneous Multi-class Pixel Labeling over Coherent Image Sets Paul Rivera Research School of Computer Science Australian National University Canberra, ACT 0200 Stephen Gould Research School of Computer
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart
 Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart 1 Motivation Up to now we have considered distributions of a single random variable
Statistical and Learning Techniques in Computer Vision Lecture 1: Markov Random Fields Jens Rittscher and Chuck Stewart 1 Motivation Up to now we have considered distributions of a single random variable
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model
 Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
Object Segmentation and Tracking in 3D Video With Sparse Depth Information Using a Fully Connected CRF Model Ido Ofir Computer Science Department Stanford University December 17, 2011 Abstract This project
Probabilistic Graphical Models
 Overview of Part Two Probabilistic Graphical Models Part Two: Inference and Learning Christopher M. Bishop Exact inference and the junction tree MCMC Variational methods and EM Example General variational
Overview of Part Two Probabilistic Graphical Models Part Two: Inference and Learning Christopher M. Bishop Exact inference and the junction tree MCMC Variational methods and EM Example General variational
Graphical Models. Pradeep Ravikumar Department of Computer Science The University of Texas at Austin
 Graphical Models Pradeep Ravikumar Department of Computer Science The University of Texas at Austin Useful References Graphical models, exponential families, and variational inference. M. J. Wainwright
Graphical Models Pradeep Ravikumar Department of Computer Science The University of Texas at Austin Useful References Graphical models, exponential families, and variational inference. M. J. Wainwright
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Image Denoising Methods Based on Wavelet Transform and Threshold Functions
 Image Denoising Methods Based on Wavelet Transform and Threshold Functions Liangang Feng, Lin Lin Weihai Vocational College China liangangfeng@163.com liangangfeng@163.com ABSTRACT: There are many unavoidable
Image Denoising Methods Based on Wavelet Transform and Threshold Functions Liangang Feng, Lin Lin Weihai Vocational College China liangangfeng@163.com liangangfeng@163.com ABSTRACT: There are many unavoidable
08 An Introduction to Dense Continuous Robotic Mapping
 NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
NAVARCH/EECS 568, ROB 530 - Winter 2018 08 An Introduction to Dense Continuous Robotic Mapping Maani Ghaffari March 14, 2018 Previously: Occupancy Grid Maps Pose SLAM graph and its associated dense occupancy
Sampling informative/complex a priori probability distributions using Gibbs sampling assisted by sequential simulation
 Sampling informative/complex a priori probability distributions using Gibbs sampling assisted by sequential simulation Thomas Mejer Hansen, Klaus Mosegaard, and Knud Skou Cordua 1 1 Center for Energy Resources
Sampling informative/complex a priori probability distributions using Gibbs sampling assisted by sequential simulation Thomas Mejer Hansen, Klaus Mosegaard, and Knud Skou Cordua 1 1 Center for Energy Resources
2. Graphical Models. Undirected graphical models. Factor graphs. Bayesian networks. Conversion between graphical models. Graphical Models 2-1
 Graphical Models 2-1 2. Graphical Models Undirected graphical models Factor graphs Bayesian networks Conversion between graphical models Graphical Models 2-2 Graphical models There are three families of
Graphical Models 2-1 2. Graphical Models Undirected graphical models Factor graphs Bayesian networks Conversion between graphical models Graphical Models 2-2 Graphical models There are three families of
arxiv: v1 [cs.cv] 20 Oct 2012
![arxiv: v1 [cs.cv] 20 Oct 2012](/thumbs/75/71957326.jpg "arxiv: v1 [cs.cv] 20 Oct 2012") Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials arxiv:1210.5644v1 [cs.cv] 20 Oct 2012 Philipp Krähenbühl Computer Science Department Stanford University philkr@cs.stanford.edu
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials arxiv:1210.5644v1 [cs.cv] 20 Oct 2012 Philipp Krähenbühl Computer Science Department Stanford University philkr@cs.stanford.edu
intro, applications MRF, labeling... how it can be computed at all? Applications in segmentation: GraphCut, GrabCut, demos
 Image as Markov Random Field and Applications 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Talk Outline Last update:
Image as Markov Random Field and Applications 1 Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Talk Outline Last update:
Low-dimensional Representations of Hyperspectral Data for Use in CRF-based Classification
 Rochester Institute of Technology RIT Scholar Works Presentations and other scholarship 8-31-2015 Low-dimensional Representations of Hyperspectral Data for Use in CRF-based Classification Yang Hu Nathan
Rochester Institute of Technology RIT Scholar Works Presentations and other scholarship 8-31-2015 Low-dimensional Representations of Hyperspectral Data for Use in CRF-based Classification Yang Hu Nathan
ECG782: Multidimensional Digital Signal Processing
 ECG782: Multidimensional Digital Signal Processing Object Recognition http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Knowledge Representation Statistical Pattern Recognition Neural Networks Boosting
ECG782: Multidimensional Digital Signal Processing Object Recognition http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Knowledge Representation Statistical Pattern Recognition Neural Networks Boosting
Structured Learning. Jun Zhu
 Structured Learning Jun Zhu Supervised learning Given a set of I.I.D. training samples Learn a prediction function b r a c e Supervised learning (cont d) Many different choices Logistic Regression Maximum
Structured Learning Jun Zhu Supervised learning Given a set of I.I.D. training samples Learn a prediction function b r a c e Supervised learning (cont d) Many different choices Logistic Regression Maximum
Spatial Latent Dirichlet Allocation
 Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
MRF-based Algorithms for Segmentation of SAR Images
 This paper originally appeared in the Proceedings of the 998 International Conference on Image Processing, v. 3, pp. 770-774, IEEE, Chicago, (998) MRF-based Algorithms for Segmentation of SAR Images Robert
This paper originally appeared in the Proceedings of the 998 International Conference on Image Processing, v. 3, pp. 770-774, IEEE, Chicago, (998) MRF-based Algorithms for Segmentation of SAR Images Robert
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Computer vision: models, learning and inference. Chapter 10 Graphical Models
 Computer vision: models, learning and inference Chapter 10 Graphical Models Independence Two variables x 1 and x 2 are independent if their joint probability distribution factorizes as Pr(x 1, x 2 )=Pr(x
Computer vision: models, learning and inference Chapter 10 Graphical Models Independence Two variables x 1 and x 2 are independent if their joint probability distribution factorizes as Pr(x 1, x 2 )=Pr(x
Information theory tools to rank MCMC algorithms on probabilistic graphical models
 Information theory tools to rank MCMC algorithms on probabilistic graphical models Firas Hamze, Jean-Noel Rivasseau and Nando de Freitas Computer Science Department University of British Columbia Email:
Information theory tools to rank MCMC algorithms on probabilistic graphical models Firas Hamze, Jean-Noel Rivasseau and Nando de Freitas Computer Science Department University of British Columbia Email:
Image Modeling using Tree Structured Conditional Random Fields
 Image Modeling using Tree Structured Conditional Random Fields Pranjal Awasthi IBM India Research Lab New Delhi prawasth@in.ibm.com Aakanksha Gagrani Dept. of CSE IIT Madras aksgag@cse.iitm.ernet.in Balaraman
Image Modeling using Tree Structured Conditional Random Fields Pranjal Awasthi IBM India Research Lab New Delhi prawasth@in.ibm.com Aakanksha Gagrani Dept. of CSE IIT Madras aksgag@cse.iitm.ernet.in Balaraman
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
HIERARCHICAL CONDITIONAL RANDOM FIELD FOR MULTI-CLASS IMAGE CLASSIFICATION
 HIERARCHICAL CONDITIONAL RANDOM FIELD FOR MULTI-CLASS IMAGE CLASSIFICATION Michael Ying Yang, Wolfgang Förstner Department of Photogrammetry, Bonn University, Bonn, Germany michaelyangying@uni-bonn.de,
HIERARCHICAL CONDITIONAL RANDOM FIELD FOR MULTI-CLASS IMAGE CLASSIFICATION Michael Ying Yang, Wolfgang Förstner Department of Photogrammetry, Bonn University, Bonn, Germany michaelyangying@uni-bonn.de,
Neighbourhood-consensus message passing and its potentials in image processing applications
 Neighbourhood-consensus message passing and its potentials in image processing applications Tijana Ružić a, Aleksandra Pižurica a and Wilfried Philips a a Ghent University, TELIN-IPI-IBBT, Sint-Pietersnieuwstraat
Neighbourhood-consensus message passing and its potentials in image processing applications Tijana Ružić a, Aleksandra Pižurica a and Wilfried Philips a a Ghent University, TELIN-IPI-IBBT, Sint-Pietersnieuwstraat
Molecular Associative Memory with Spatial Auto-logistic Model for Pattern Recall
 with Spatial Auto-logistic Model for Pattern Recall Dharani Punithan 1 and Byoung-Tak Zhang 2 1 Institute of Computer Technology, Seoul National University, South Korea 2 Dept. of Computer Science and
with Spatial Auto-logistic Model for Pattern Recall Dharani Punithan 1 and Byoung-Tak Zhang 2 1 Institute of Computer Technology, Seoul National University, South Korea 2 Dept. of Computer Science and
Scene Segmentation in Adverse Vision Conditions
 Scene Segmentation in Adverse Vision Conditions Evgeny Levinkov Max Planck Institute for Informatics, Saarbrücken, Germany levinkov@mpi-inf.mpg.de Abstract. Semantic road labeling is a key component of
Scene Segmentation in Adverse Vision Conditions Evgeny Levinkov Max Planck Institute for Informatics, Saarbrücken, Germany levinkov@mpi-inf.mpg.de Abstract. Semantic road labeling is a key component of
Bayesian Spherical Wavelet Shrinkage: Applications to Shape Analysis
 Bayesian Spherical Wavelet Shrinkage: Applications to Shape Analysis Xavier Le Faucheur a, Brani Vidakovic b and Allen Tannenbaum a a School of Electrical and Computer Engineering, b Department of Biomedical
Bayesian Spherical Wavelet Shrinkage: Applications to Shape Analysis Xavier Le Faucheur a, Brani Vidakovic b and Allen Tannenbaum a a School of Electrical and Computer Engineering, b Department of Biomedical
Contextual Recognition of Hand-drawn Diagrams with Conditional Random Fields
 Contextual Recognition of Hand-drawn Diagrams with Conditional Random Fields Martin Szummer, Yuan Qi Microsoft Research, 7 J J Thomson Avenue, Cambridge CB3 0FB, UK szummer@microsoft.com, yuanqi@media.mit.edu
Contextual Recognition of Hand-drawn Diagrams with Conditional Random Fields Martin Szummer, Yuan Qi Microsoft Research, 7 J J Thomson Avenue, Cambridge CB3 0FB, UK szummer@microsoft.com, yuanqi@media.mit.edu
Robust Shape Retrieval Using Maximum Likelihood Theory
 Robust Shape Retrieval Using Maximum Likelihood Theory Naif Alajlan 1, Paul Fieguth 2, and Mohamed Kamel 1 1 PAMI Lab, E & CE Dept., UW, Waterloo, ON, N2L 3G1, Canada. naif, mkamel@pami.uwaterloo.ca 2
Robust Shape Retrieval Using Maximum Likelihood Theory Naif Alajlan 1, Paul Fieguth 2, and Mohamed Kamel 1 1 PAMI Lab, E & CE Dept., UW, Waterloo, ON, N2L 3G1, Canada. naif, mkamel@pami.uwaterloo.ca 2
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
High-Resolution Image Classification Integrating Spectral-Spatial-Location Cues by Conditional Random Fields
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 25, NO. 9, SEPTEMBER 2016 4033 High-Resolution Image Classification Integrating Spectral-Spatial-Location Cues by Conditional Random Fields Ji Zhao, Student
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 25, NO. 9, SEPTEMBER 2016 4033 High-Resolution Image Classification Integrating Spectral-Spatial-Location Cues by Conditional Random Fields Ji Zhao, Student
International Journal of Electrical, Electronics ISSN No. (Online): and Computer Engineering 3(2): 85-90(2014)
: and Computer Engineering 3(2): 85-90(2014)") I J E E E C International Journal of Electrical, Electronics ISSN No. (Online): 2277-2626 Computer Engineering 3(2): 85-90(2014) Robust Approach to Recognize Localize Text from Natural Scene Images Khushbu
I J E E E C International Journal of Electrical, Electronics ISSN No. (Online): 2277-2626 Computer Engineering 3(2): 85-90(2014) Robust Approach to Recognize Localize Text from Natural Scene Images Khushbu
MR IMAGE SEGMENTATION
 MR IMAGE SEGMENTATION Prepared by : Monil Shah What is Segmentation? Partitioning a region or regions of interest in images such that each region corresponds to one or more anatomic structures Classification
MR IMAGE SEGMENTATION Prepared by : Monil Shah What is Segmentation? Partitioning a region or regions of interest in images such that each region corresponds to one or more anatomic structures Classification
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008
 CS 664 Spring 2008") Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Regularization and Markov Random Fields (MRF) CS 664 Spring 2008 Regularization in Low Level Vision Low level vision problems concerned with estimating some quantity at each pixel Visual motion (u(x,y),v(x,y))
Iterative Removing Salt and Pepper Noise based on Neighbourhood Information
 Iterative Removing Salt and Pepper Noise based on Neighbourhood Information Liu Chun College of Computer Science and Information Technology Daqing Normal University Daqing, China Sun Bishen Twenty-seventh
Iterative Removing Salt and Pepper Noise based on Neighbourhood Information Liu Chun College of Computer Science and Information Technology Daqing Normal University Daqing, China Sun Bishen Twenty-seventh
Loopy Belief Propagation
 Loopy Belief Propagation Research Exam Kristin Branson September 29, 2003 Loopy Belief Propagation p.1/73 Problem Formalization Reasoning about any real-world problem requires assumptions about the structure
Loopy Belief Propagation Research Exam Kristin Branson September 29, 2003 Loopy Belief Propagation p.1/73 Problem Formalization Reasoning about any real-world problem requires assumptions about the structure
Handwritten Script Recognition at Block Level
 Chapter 4 Handwritten Script Recognition at Block Level -------------------------------------------------------------------------------------------------------------------------- Optical character recognition
Chapter 4 Handwritten Script Recognition at Block Level -------------------------------------------------------------------------------------------------------------------------- Optical character recognition
Expectation Propagation
 Expectation Propagation Erik Sudderth 6.975 Week 11 Presentation November 20, 2002 Introduction Goal: Efficiently approximate intractable distributions Features of Expectation Propagation (EP): Deterministic,
Expectation Propagation Erik Sudderth 6.975 Week 11 Presentation November 20, 2002 Introduction Goal: Efficiently approximate intractable distributions Features of Expectation Propagation (EP): Deterministic,
GiRaF: a toolbox for Gibbs Random Fields analysis
 GiRaF: a toolbox for Gibbs Random Fields analysis Julien Stoehr *1, Pierre Pudlo 2, and Nial Friel 1 1 University College Dublin 2 Aix-Marseille Université February 24, 2016 Abstract GiRaF package offers
GiRaF: a toolbox for Gibbs Random Fields analysis Julien Stoehr *1, Pierre Pudlo 2, and Nial Friel 1 1 University College Dublin 2 Aix-Marseille Université February 24, 2016 Abstract GiRaF package offers
Probabilistic Graphical Models Part III: Example Applications
 Probabilistic Graphical Models Part III: Example Applications Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2014 CS 551, Fall 2014 c 2014, Selim
Probabilistic Graphical Models Part III: Example Applications Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2014 CS 551, Fall 2014 c 2014, Selim
Denoising Method for Removal of Impulse Noise Present in Images
 ISSN 2278 0211 (Online) Denoising Method for Removal of Impulse Noise Present in Images D. Devasena AP (Sr.G), Sri Ramakrishna Engineering College, Coimbatore, Tamil Nadu, India A.Yuvaraj Student, Sri
ISSN 2278 0211 (Online) Denoising Method for Removal of Impulse Noise Present in Images D. Devasena AP (Sr.G), Sri Ramakrishna Engineering College, Coimbatore, Tamil Nadu, India A.Yuvaraj Student, Sri
An Effective Denoising Method for Images Contaminated with Mixed Noise Based on Adaptive Median Filtering and Wavelet Threshold Denoising
 J Inf Process Syst, Vol.14, No.2, pp.539~551, April 2018 https://doi.org/10.3745/jips.02.0083 ISSN 1976-913X (Print) ISSN 2092-805X (Electronic) An Effective Denoising Method for Images Contaminated with
J Inf Process Syst, Vol.14, No.2, pp.539~551, April 2018 https://doi.org/10.3745/jips.02.0083 ISSN 1976-913X (Print) ISSN 2092-805X (Electronic) An Effective Denoising Method for Images Contaminated with
Super Resolution Using Graph-cut
 Super Resolution Using Graph-cut Uma Mudenagudi, Ram Singla, Prem Kalra, and Subhashis Banerjee Department of Computer Science and Engineering Indian Institute of Technology Delhi Hauz Khas, New Delhi,
Super Resolution Using Graph-cut Uma Mudenagudi, Ram Singla, Prem Kalra, and Subhashis Banerjee Department of Computer Science and Engineering Indian Institute of Technology Delhi Hauz Khas, New Delhi,
Using the Kolmogorov-Smirnov Test for Image Segmentation
 Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference
 Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Text segmentation for MRC Document compression using a Markov Random Field model
 Text segmentation for MRC Document compression using a Markov Random Field model Final dissertation by Eri Haneda Advisory committee: Prof. Charles Bouman (Chair) Prof. Jan Allebach Prof. Peter Doerschuk
Text segmentation for MRC Document compression using a Markov Random Field model Final dissertation by Eri Haneda Advisory committee: Prof. Charles Bouman (Chair) Prof. Jan Allebach Prof. Peter Doerschuk
Semantic Segmentation of Street-Side Images
 Semantic Segmentation of Street-Side Images Michal Recky 1, Franz Leberl 2 1 Institute for Computer Graphics and Vision Graz University of Technology recky@icg.tugraz.at 2 Institute for Computer Graphics
Semantic Segmentation of Street-Side Images Michal Recky 1, Franz Leberl 2 1 Institute for Computer Graphics and Vision Graz University of Technology recky@icg.tugraz.at 2 Institute for Computer Graphics
Test Segmentation of MRC Document Compression and Decompression by Using MATLAB
 Test Segmentation of MRC Document Compression and Decompression by Using MATLAB N.Rajeswari 1, S.Rathnapriya 2, S.Nijandan 3 Assistant Professor/EEE, GRT Institute of Engineering & Technology, Tamilnadu,
Test Segmentation of MRC Document Compression and Decompression by Using MATLAB N.Rajeswari 1, S.Rathnapriya 2, S.Nijandan 3 Assistant Professor/EEE, GRT Institute of Engineering & Technology, Tamilnadu,
CS395T paper review. Indoor Segmentation and Support Inference from RGBD Images. Chao Jia Sep
 CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
CS395T paper review Indoor Segmentation and Support Inference from RGBD Images Chao Jia Sep 28 2012 Introduction What do we want -- Indoor scene parsing Segmentation and labeling Support relationships
A Feature Point Matching Based Approach for Video Objects Segmentation
 A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
A Feature Point Matching Based Approach for Video Objects Segmentation Yan Zhang, Zhong Zhou, Wei Wu State Key Laboratory of Virtual Reality Technology and Systems, Beijing, P.R. China School of Computer
Supplementary Material: Decision Tree Fields
 Supplementary Material: Decision Tree Fields Note, the supplementary material is not needed to understand the main paper. Sebastian Nowozin Sebastian.Nowozin@microsoft.com Toby Sharp toby.sharp@microsoft.com
Supplementary Material: Decision Tree Fields Note, the supplementary material is not needed to understand the main paper. Sebastian Nowozin Sebastian.Nowozin@microsoft.com Toby Sharp toby.sharp@microsoft.com
Lecture 4: Undirected Graphical Models
 Lecture 4: Undirected Graphical Models Department of Biostatistics University of Michigan zhenkewu@umich.edu http://zhenkewu.com/teaching/graphical_model 15 September, 2016 Zhenke Wu BIOSTAT830 Graphical
Lecture 4: Undirected Graphical Models Department of Biostatistics University of Michigan zhenkewu@umich.edu http://zhenkewu.com/teaching/graphical_model 15 September, 2016 Zhenke Wu BIOSTAT830 Graphical
Conditional Random Fields : Theory and Application
 Conditional Random Fields : Theory and Application Matt Seigel (mss46@cam.ac.uk) 3 June 2010 Cambridge University Engineering Department Outline The Sequence Classification Problem Linear Chain CRFs CRF
Conditional Random Fields : Theory and Application Matt Seigel (mss46@cam.ac.uk) 3 June 2010 Cambridge University Engineering Department Outline The Sequence Classification Problem Linear Chain CRFs CRF
3 : Representation of Undirected GMs
 0-708: Probabilistic Graphical Models 0-708, Spring 202 3 : Representation of Undirected GMs Lecturer: Eric P. Xing Scribes: Nicole Rafidi, Kirstin Early Last Time In the last lecture, we discussed directed
0-708: Probabilistic Graphical Models 0-708, Spring 202 3 : Representation of Undirected GMs Lecturer: Eric P. Xing Scribes: Nicole Rafidi, Kirstin Early Last Time In the last lecture, we discussed directed
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Conditional Random Fields and beyond D A N I E L K H A S H A B I C S U I U C,
 Conditional Random Fields and beyond D A N I E L K H A S H A B I C S 5 4 6 U I U C, 2 0 1 3 Outline Modeling Inference Training Applications Outline Modeling Problem definition Discriminative vs. Generative
Conditional Random Fields and beyond D A N I E L K H A S H A B I C S 5 4 6 U I U C, 2 0 1 3 Outline Modeling Inference Training Applications Outline Modeling Problem definition Discriminative vs. Generative
Image Denoising and Blind Deconvolution by Non-uniform Method
 Image Denoising and Blind Deconvolution by Non-uniform Method B.Kalaiyarasi 1, S.Kalpana 2 II-M.E(CS) 1, AP / ECE 2, Dhanalakshmi Srinivasan Engineering College, Perambalur. Abstract Image processing allows
Image Denoising and Blind Deconvolution by Non-uniform Method B.Kalaiyarasi 1, S.Kalpana 2 II-M.E(CS) 1, AP / ECE 2, Dhanalakshmi Srinivasan Engineering College, Perambalur. Abstract Image processing allows
Improving Latent Fingerprint Matching Performance by Orientation Field Estimation using Localized Dictionaries
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 11, November 2014,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology IJCSMC, Vol. 3, Issue. 11, November 2014,
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Estimating Human Pose in Images. Navraj Singh December 11, 2009
 Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Estimating Human Pose in Images Navraj Singh December 11, 2009 Introduction This project attempts to improve the performance of an existing method of estimating the pose of humans in still images. Tasks
Lecture 3: Conditional Independence - Undirected
 CS598: Graphical Models, Fall 2016 Lecture 3: Conditional Independence - Undirected Lecturer: Sanmi Koyejo Scribe: Nate Bowman and Erin Carrier, Aug. 30, 2016 1 Review for the Bayes-Ball Algorithm Recall
CS598: Graphical Models, Fall 2016 Lecture 3: Conditional Independence - Undirected Lecturer: Sanmi Koyejo Scribe: Nate Bowman and Erin Carrier, Aug. 30, 2016 1 Review for the Bayes-Ball Algorithm Recall
Texture Modeling using MRF and Parameters Estimation
 Texture Modeling using MRF and Parameters Estimation Ms. H. P. Lone 1, Prof. G. R. Gidveer 2 1 Postgraduate Student E & TC Department MGM J.N.E.C,Aurangabad 2 Professor E & TC Department MGM J.N.E.C,Aurangabad
Texture Modeling using MRF and Parameters Estimation Ms. H. P. Lone 1, Prof. G. R. Gidveer 2 1 Postgraduate Student E & TC Department MGM J.N.E.C,Aurangabad 2 Professor E & TC Department MGM J.N.E.C,Aurangabad
Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing
 Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai,
Image Segmentation Using Iterated Graph Cuts BasedonMulti-scaleSmoothing Tomoyuki Nagahashi 1, Hironobu Fujiyoshi 1, and Takeo Kanade 2 1 Dept. of Computer Science, Chubu University. Matsumoto 1200, Kasugai,
Detecting Salient Contours Using Orientation Energy Distribution. Part I: Thresholding Based on. Response Distribution
 Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Detecting Salient Contours Using Orientation Energy Distribution The Problem: How Does the Visual System Detect Salient Contours? CPSC 636 Slide12, Spring 212 Yoonsuck Choe Co-work with S. Sarma and H.-C.
Spatio-Temporal LBP based Moving Object Segmentation in Compressed Domain
 2012 IEEE Ninth International Conference on Advanced Video and Signal-Based Surveillance Spatio-Temporal LBP based Moving Object Segmentation in Compressed Domain Jianwei Yang 1, Shizheng Wang 2, Zhen
2012 IEEE Ninth International Conference on Advanced Video and Signal-Based Surveillance Spatio-Temporal LBP based Moving Object Segmentation in Compressed Domain Jianwei Yang 1, Shizheng Wang 2, Zhen
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
IMAGE SALIENCY DETECTION VIA MULTI-SCALE STATISTICAL NON-REDUNDANCY MODELING. Christian Scharfenberger, Aanchal Jain, Alexander Wong, and Paul Fieguth
 IMAGE SALIENCY DETECTION VIA MULTI-SCALE STATISTICAL NON-REDUNDANCY MODELING Christian Scharfenberger, Aanchal Jain, Alexander Wong, and Paul Fieguth Department of Systems Design Engineering, University
IMAGE SALIENCY DETECTION VIA MULTI-SCALE STATISTICAL NON-REDUNDANCY MODELING Christian Scharfenberger, Aanchal Jain, Alexander Wong, and Paul Fieguth Department of Systems Design Engineering, University
Conditional Random Fields for Object Recognition
 Conditional Random Fields for Object Recognition Ariadna Quattoni Michael Collins Trevor Darrell MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 {ariadna, mcollins, trevor}@csail.mit.edu
Conditional Random Fields for Object Recognition Ariadna Quattoni Michael Collins Trevor Darrell MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 {ariadna, mcollins, trevor}@csail.mit.edu
CS545 Project: Conditional Random Fields on an ecommerce Website
 CS545 Project: Conditional Random Fields on an ecommerce Website Brock Wilcox December 18, 2013 Contents 1 Conditional Random Fields 1 1.1 Overview................................................. 1 1.2
CS545 Project: Conditional Random Fields on an ecommerce Website Brock Wilcox December 18, 2013 Contents 1 Conditional Random Fields 1 1.1 Overview................................................. 1 1.2
Markov Random Fields for Recognizing Textures modeled by Feature Vectors
 Markov Random Fields for Recognizing Textures modeled by Feature Vectors Juliette Blanchet, Florence Forbes, and Cordelia Schmid Inria Rhône-Alpes, 655 avenue de l Europe, Montbonnot, 38334 Saint Ismier
Markov Random Fields for Recognizing Textures modeled by Feature Vectors Juliette Blanchet, Florence Forbes, and Cordelia Schmid Inria Rhône-Alpes, 655 avenue de l Europe, Montbonnot, 38334 Saint Ismier
Semi-supervised Data Representation via Affinity Graph Learning
 1 Semi-supervised Data Representation via Affinity Graph Learning Weiya Ren 1 1 College of Information System and Management, National University of Defense Technology, Changsha, Hunan, P.R China, 410073
1 Semi-supervised Data Representation via Affinity Graph Learning Weiya Ren 1 1 College of Information System and Management, National University of Defense Technology, Changsha, Hunan, P.R China, 410073
Machine Learning A W 1sst KU. b) [1 P] Give an example for a probability distributions P (A, B, C) that disproves
![Machine Learning A W 1sst KU. b) [1 P] Give an example for a probability distributions P (A, B, C) that disproves](/thumbs/93/111796408.jpg "Machine Learning A W 1sst KU. b) [1 P] Give an example for a probability distributions P (A, B, C) that disproves") Machine Learning A 708.064 11W 1sst KU Exercises Problems marked with * are optional. 1 Conditional Independence I [2 P] a) [1 P] Give an example for a probability distribution P (A, B, C) that disproves
Machine Learning A 708.064 11W 1sst KU Exercises Problems marked with * are optional. 1 Conditional Independence I [2 P] a) [1 P] Give an example for a probability distribution P (A, B, C) that disproves
Edge Classification in Networks
 Charu C. Aggarwal, Peixiang Zhao, and Gewen He Florida State University IBM T J Watson Research Center Edge Classification in Networks ICDE Conference, 2016 Introduction We consider in this paper the edge
Charu C. Aggarwal, Peixiang Zhao, and Gewen He Florida State University IBM T J Watson Research Center Edge Classification in Networks ICDE Conference, 2016 Introduction We consider in this paper the edge
Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection
 Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin (University of California, Riverside) Peter van Beek & Xu Chen (SHARP Labs of America, Camas, WA) 2015/8/30
Direct Matrix Factorization and Alignment Refinement: Application to Defect Detection Zhen Qin (University of California, Riverside) Peter van Beek & Xu Chen (SHARP Labs of America, Camas, WA) 2015/8/30
Motion Detection Algorithm
 Volume 1, No. 12, February 2013 ISSN 2278-1080 The International Journal of Computer Science & Applications (TIJCSA) RESEARCH PAPER Available Online at http://www.journalofcomputerscience.com/ Motion Detection
Volume 1, No. 12, February 2013 ISSN 2278-1080 The International Journal of Computer Science & Applications (TIJCSA) RESEARCH PAPER Available Online at http://www.journalofcomputerscience.com/ Motion Detection