Dynamics and Vibration Control of Flexible Systems
|
|
|
- Melinda Colleen Hancock
- 5 years ago
- Views:
Transcription
1 The 9th Workshop on Control of Distributed Parameter Systems IEEE ICAL 2009, Shenyang Dynamics and Vibration Control of Flexible Systems Wei He 1 and Shuzhi Sam Ge 2 1 School of Automation & Electrical Engineering, University of Science and Technology Beijing 2 Department of Electrical & Computer Engineering, National University of Singapore 3 rd July
2 Outline 1. Overview and Background 2. Flexible String and Its Applications 3. Euler-Bernoulli Beam and Its Applications 4. Conclusion and Future Work 2
3 Motivation The advantages of flexible structures greatly motivate the applications of flexible structures in the fields of aerospace, robotics, offshore engineering, etc. Objective To develop modeling and control methods of the flexible systems with guaranteed stability. Challenges Infinite dimensions of the system due to the flexibility; Dynamic modeling and boundary control design of the flexible systems; Stability analysis for the closed-loop systems. 3
4 Control methods for flexible systems Distributed control: by using distributed sensors and actuators; Boundary control: based on PDE model of the system. Advantages of boundary control Avoid spillover instability due to model truncation; Require fewer sensors and actuators; 4
5 Outline 1. Overview and Background 2. Flexible String and Its Applications 3. Euler-Bernoulli Beam and Its Applications 4. Conclusions and Future Work 5
6 Applications for the Flexible String Installation System Ocean Mooring System Crane System 6


7 2. 1 Installation System Accurate placement Vibration suppression 7
8 Dynamics of the Installation System Nomenclature Definition Subsea installation system 8
9 Modeling Governing equation Boundary conditions Challenges: position the payload and reduce vibrations of the cable at the same time. 9
10 Control Design where The adaptation law is proposed as 10
11 Stability Analysis 11

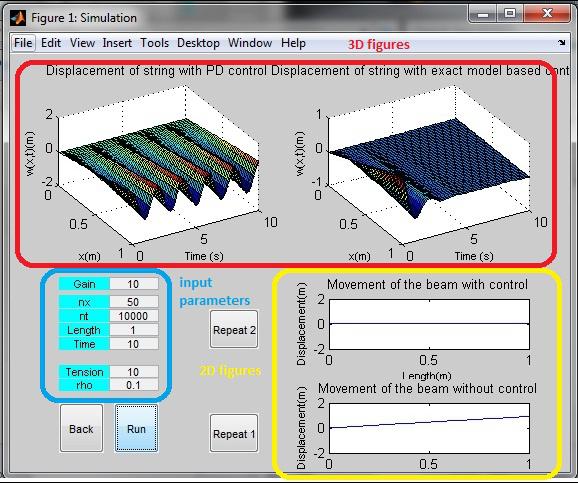
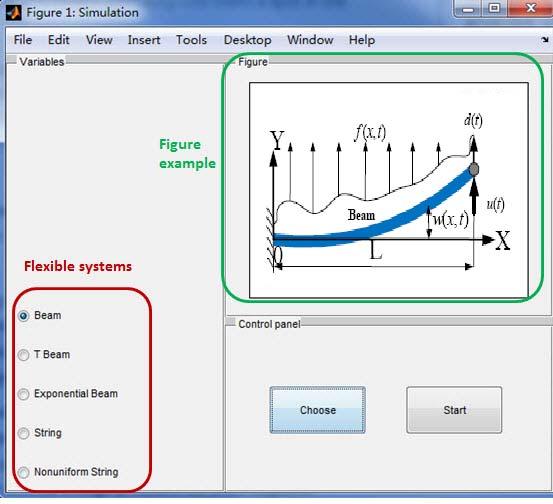
12 Simulation Platform for Flexible Systems 12
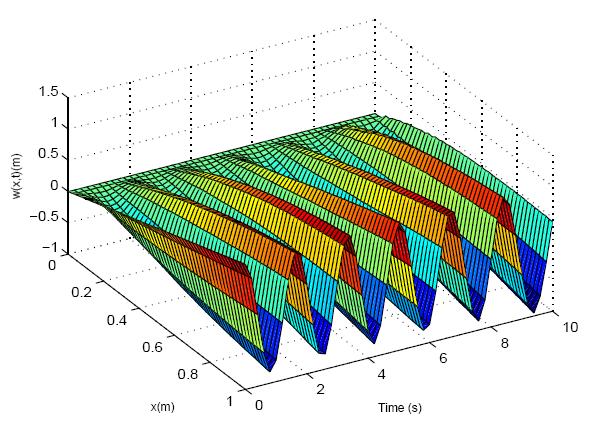
13 Simulation 13


14 Simulation Position of the cable without control Position of the cable with robust adaptive boundary control 14

15 Video for the marine installation system without control Video for the marine installation system with the proposed control 15



16 2.2 Floating Platforms with Mooring System Shuttle Tanker Tension Leg Platform Mooring System FPSO vessel Umbilical Risers Mooring lines Drag Anchors Suction Anchors Courtesy of Atlantis 16
17 Dynamics of the Mooring system Nomenclature A FPSO vessel with the thruster assisted position mooring system 17
18 Modeling Governing equations Boundary conditions 18
19 Control Design 19
20 Stability Analysis 20
21 Simulation 21
22 Simulation Snapshots of the mooring system movements without control 22
23 Simulation Video of the mooring system without control 23
24 Simulation Snapshots of the mooring system movements with the proposed control 24


25 Simulation Video of the mooring system with the proposed control 25


26 2. 3 Crane System Overhead crane Crane cables 26
27 Dynamics of a Crane System Governing equation Boundary conditions Constraint Schematic of a flexible crane system. 27
28 Control Design The boundary control Barrier Lyapunov Function 28
 with boundary control without barrier term, and (d) with the PD control")
29 Simulation (a) Without control, (b) with the IBLF-based adaptive control, (c) with boundary control without barrier term, and (d) with the PD control 29
30 Simulation Constraint (a) Without control, (b) with the IBLF-based adaptive control, (c) with boundary control without barrier term, and (d) with the PD control 30
31 Outline 1. Overview and Background 2. Flexible String and Its Applications 3. Euler-Bernoulli Beam and Its Applications 4. Conclusion and Future Work 31
32 Applications for the Euler-Bernoulli Beam Flexible Robotic Manipulator Robotic Aircraft with Flexible Wings Marine Riser System 32


33 3.1 Flexible Robotic Manipulator System Flexible manipulator in the outer space 33
34 3. 1 Dynamics of the Flexible Robotic Manipulator A flexible robotic manipulator 34
35 Modeling Governing equations Boundary conditions Motion of the angular position 35
36 Control Design The torque control law Block diagram of control design for flexible robotic manipulator 36
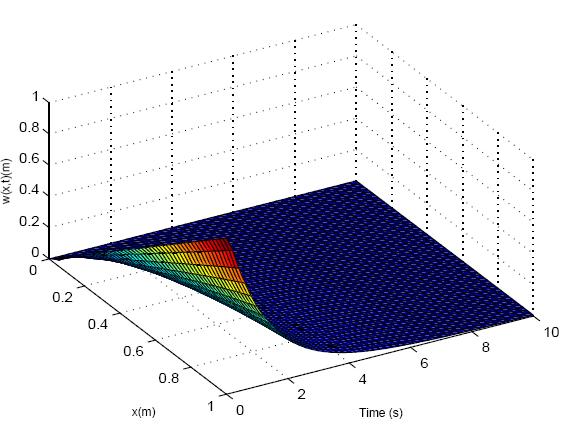
37 Simulation 37


38 Simulation Displacement of flexible system without control Displacement of flexible system with boundary control 38

39 Simulation Displacement of flexible manipulator system without control Displacement of flexible manipulator system with boundary control 39
40 Simulation Angular position of flexible system without control Angular position of flexible system with boundary control 40
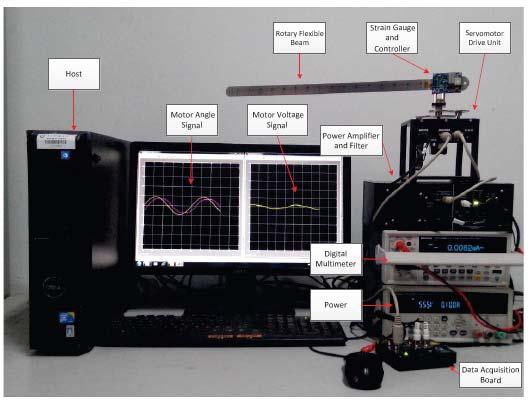
41 Experimental Platform 41
42 Experimental Platform Diagram of flexible Robotic Manipulator 42
43 Programming Simulink implementation diagram with boundary control 43


44 Experimental results Video for the flexible robotic manipulator without control Video for the flexible robotic manipulator with the proposed control 44

45 3.2 Robotic Aircraft with Flexible Wings Robot with flexible wings Robotic aircraft concept Wing flexibility not only improves aircraft performance and stability passively, but can also be actuated actively for control. 45

46 Dynamics of the Robotic Aircraft with Flexible Wings Governing equation Boundary conditions 46
47 Control Design We design auxiliary signals: We design the control laws as 47
48 Simulation Parameters of the robotic aircraft with flexible wings Mass 44.00g Length of the wing Mass per unit span Bending stiffness 41.80cm 10 kg/m 0:12 Nm^2 48


49 Simulation Bending displacement of the system w(x,t) 49


50 Simulation Bending displacement of the system Ɵ(x,t) 50


51 3.3 Marine Riser System A flexible marine riser system The structure of the riser 51

52 Dynamics of the marine riser Nomenclature A typical marine flexible riser system 52
53 Modeling Governing equations Boundary conditions Challenges: nonlinear PDEs 53
54 Control Design The control is independent of system parameters, thus possessing robustness to variations in system parameters. All the signals during the control process can be measured through position sensors at the top boundary of the riser. The control system requires fewer sensors and actuators. 54
55 Stability Analysis 55
56 Simulation 56

57 Simulation Ocean surface current U(t) 57


58 Simulation Displacement of the riser without control 58


59 Simulation Displacement of the riser with the proposed control 59


60 Overlay of riser profiles with control and without control 60
61 Simulation Top transverse displacement Transverse control input Top longitudinal displacement Longitudinal control input 61
62 Outline 1. Overview and Background 2. Flexible String and Its Applications 3. Euler-Bernoulli Beam and Its Applications 4. Conclusion and Future Work 62
63 Conclusions Investigations of dynamical characteristics for a)flexible string: installation system, mooring system, crane system; b)flexible beam: marine riser, robot with flexible wing. Control design for a)flexible string system; b)flexible beam system. Stability analysis of different types of PDE systems for a) Linear PDE: mooring system, installation system, etc.; b) nonlinear PDE: riser system, etc. 63
64 Conclusions Dynamical modeling for several classes of the flexible systems has been discussed. Boundary control for the flexible systems have been developed. Vibration suppression and stability analysis of the flexible systems have been studied. Simulation and experimental results have been provided to verify the effectiveness and the performance of the proposed method. 64

65 Future Work Control of vibrations in the three-dimensional space. 65

66 Future Work Control of the tension for the mooring lines. Shuttle Tanker Tension Leg Platform Mooring System FPSO vessel Umbilical Risers Mooring lines Suction Anchors Drag Anchors Courtesy of Atlantis 66
67 Future Work System Design for the Robotic Aircraft with Flexible Wings 67
68 Thank you very much! 68
DETERMINING suitable types, number and locations of
 108 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 1, FEBRUARY 1998 Instrumentation Architecture and Sensor Fusion for Systems Control Michael E. Stieber, Member IEEE, Emil Petriu,
108 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 47, NO. 1, FEBRUARY 1998 Instrumentation Architecture and Sensor Fusion for Systems Control Michael E. Stieber, Member IEEE, Emil Petriu,
Development of the Compliant Mooring Line Model for FLOW-3D
 Flow Science Report 08-15 Development of the Compliant Mooring Line Model for FLOW-3D Gengsheng Wei Flow Science, Inc. October 2015 1. Introduction Mooring systems are common in offshore structures, ship
Flow Science Report 08-15 Development of the Compliant Mooring Line Model for FLOW-3D Gengsheng Wei Flow Science, Inc. October 2015 1. Introduction Mooring systems are common in offshore structures, ship
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G.
 VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms
 Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
ITTC Recommended Procedures and Guidelines. ITTC Quality System Manual. Recommended Procedures and Guidelines
 Offshore Structures with Mooring Lines 7.5 Page 1 of 6 ITTC Quality System Manual Recommended Procedure Offshore Structures with Mooring Lines 7.5 Process Control 7.5- Testing and Extrapolation Methods
Offshore Structures with Mooring Lines 7.5 Page 1 of 6 ITTC Quality System Manual Recommended Procedure Offshore Structures with Mooring Lines 7.5 Process Control 7.5- Testing and Extrapolation Methods
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Modal Analysis of Three Dimensional Numerical Control Laser Cutting Machine Based on Finite Element Method Yun-Xin CHEN*
 Proceedings of the 3rd International Conference on Material Engineering and Application (ICMEA 2016) Modal Analysis of Three Dimensional Numerical Control Laser Cutting Machine Based on Finite Element
Proceedings of the 3rd International Conference on Material Engineering and Application (ICMEA 2016) Modal Analysis of Three Dimensional Numerical Control Laser Cutting Machine Based on Finite Element
Purdue e-pubs. Purdue University. Jeongil Park Samsung Electronics Co. Nasir Bilal Purdue University. Douglas E. Adams Purdue University
 Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 26 Development of a Two-Dimensional Finite Element Model of a Suction Valve for Reduction
Purdue University Purdue e-pubs International Compressor Engineering Conference School of Mechanical Engineering 26 Development of a Two-Dimensional Finite Element Model of a Suction Valve for Reduction
Method for designing and controlling compliant gripper
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Method for designing and controlling compliant gripper To cite this article: A R Spanu et al 2016 IOP Conf. Ser.: Mater. Sci.
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Method for designing and controlling compliant gripper To cite this article: A R Spanu et al 2016 IOP Conf. Ser.: Mater. Sci.
Learn more at
 Proceedings of the th International Conference on Ocean, Offshore and Arctic Engineering OMAE May - June,, St. John s, Newfoundland and Labrador, Canada OMAE- HYDRODYNAMIC COEFFICIENT MAPS FOR RISER INTERFERENCE
Proceedings of the th International Conference on Ocean, Offshore and Arctic Engineering OMAE May - June,, St. John s, Newfoundland and Labrador, Canada OMAE- HYDRODYNAMIC COEFFICIENT MAPS FOR RISER INTERFERENCE
Global to Local Model Interface for Deepwater Top Tension Risers
 Global to Local Model Interface for Deepwater Top Tension Risers Mateusz Podskarbi Karan Kakar 2H Offshore Inc, Houston, TX Abstract The water depths from which oil and gas are being produced are reaching
Global to Local Model Interface for Deepwater Top Tension Risers Mateusz Podskarbi Karan Kakar 2H Offshore Inc, Houston, TX Abstract The water depths from which oil and gas are being produced are reaching
Robust Controller Design for an Autonomous Underwater Vehicle
 DRC04 Robust Controller Design for an Autonomous Underwater Vehicle Pakpong Jantapremjit 1, * 1 Department of Mechanical Engineering, Faculty of Engineering, Burapha University, Chonburi, 20131 * E-mail:
DRC04 Robust Controller Design for an Autonomous Underwater Vehicle Pakpong Jantapremjit 1, * 1 Department of Mechanical Engineering, Faculty of Engineering, Burapha University, Chonburi, 20131 * E-mail:
Experimental Verification of Stability Region of Balancing a Single-wheel Robot: an Inverted Stick Model Approach
 IECON-Yokohama November 9-, Experimental Verification of Stability Region of Balancing a Single-wheel Robot: an Inverted Stick Model Approach S. D. Lee Department of Mechatronics Engineering Chungnam National
IECON-Yokohama November 9-, Experimental Verification of Stability Region of Balancing a Single-wheel Robot: an Inverted Stick Model Approach S. D. Lee Department of Mechatronics Engineering Chungnam National
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS
 A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA
 Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA Andrew Smyth, P.E. LPI, Inc., New York, NY, USA Abstract Overhead crane wire ropes utilized within manufacturing plants are subject to extensive
Simulation of Overhead Crane Wire Ropes Utilizing LS-DYNA Andrew Smyth, P.E. LPI, Inc., New York, NY, USA Abstract Overhead crane wire ropes utilized within manufacturing plants are subject to extensive
Control of a quadrotor manipulating a beam (2 projects available)
") Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
course outline basic principles of numerical analysis, intro FEM
 idealization, equilibrium, solutions, interpretation of results types of numerical engineering problems continuous vs discrete systems direct stiffness approach differential & variational formulation introduction
idealization, equilibrium, solutions, interpretation of results types of numerical engineering problems continuous vs discrete systems direct stiffness approach differential & variational formulation introduction
Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very-Shallow Waters
 Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very-Shallow Waters P. Ananthakrishnan Department of Ocean Engineering Florida Atlantic University
Application of Hydrodynamics and Dynamics Models for Efficient Operation of Modular Mini-AUVs in Shallow and Very-Shallow Waters P. Ananthakrishnan Department of Ocean Engineering Florida Atlantic University
Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique
 Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique Noor Asyikin binti
Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique Noor Asyikin binti
Control Approaches for Walking and Running
 DLR.de Chart 1 > Humanoids 2015 > Christian Ott > 02.11.2015 Control Approaches for Walking and Running Christian Ott, Johannes Englsberger German Aerospace Center (DLR) DLR.de Chart 2 > Humanoids 2015
DLR.de Chart 1 > Humanoids 2015 > Christian Ott > 02.11.2015 Control Approaches for Walking and Running Christian Ott, Johannes Englsberger German Aerospace Center (DLR) DLR.de Chart 2 > Humanoids 2015
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Ice Force Modeling for DP Control Systems. Jim Millan, PhD., PEng. John Wang, PhD. MTS DP Conference, October 11-12, 2011
 Ice Force Modeling for DP Control Systems Jim Millan, PhD., PEng. John Wang, PhD., October 11-12, 2011 Challenges of DP Stationkeeping in Ice Traditional DP: Wind, wave and current loads are slowly varying,
Ice Force Modeling for DP Control Systems Jim Millan, PhD., PEng. John Wang, PhD., October 11-12, 2011 Challenges of DP Stationkeeping in Ice Traditional DP: Wind, wave and current loads are slowly varying,
Smart actuator effectiveness improvement through modal analysis
 Smart actuator effectiveness improvement through modal analysis A. Joshi a and S. M. Khot b a Professor, Department of Aerospace Engineering, Indian Institute of Technology, Bombay. b Research Scholar,
Smart actuator effectiveness improvement through modal analysis A. Joshi a and S. M. Khot b a Professor, Department of Aerospace Engineering, Indian Institute of Technology, Bombay. b Research Scholar,
DESIGNING FIBER OPTIC DYNAMIC RISER CABLES FOR OFFSHORE APPLICATIONS
 DESIGNING FIBER OPTIC DYNAMIC RISER CABLES FOR OFFSHORE APPLICATIONS Jon Steinar Andreassen (Nexans Norway) Email: Nexans Norway AS, P.O Box 645 Etterstad, N-65 Oslo,
DESIGNING FIBER OPTIC DYNAMIC RISER CABLES FOR OFFSHORE APPLICATIONS Jon Steinar Andreassen (Nexans Norway) Email: Nexans Norway AS, P.O Box 645 Etterstad, N-65 Oslo,
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR
 MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
Evaluation of hydrodynamic coefficients on riser floaters using CFD
 Evaluation of hydrodynamic coefficients on riser floaters using CFD Erico Santos, Pedro Mendes, Bruno Luna PETROBRAS (CENPES/PDEP/TDUT) Ricardo Damian ESSS AGENDA MOTIVATION PROCEADURE OVERVIEW RISER GLOBAL
Evaluation of hydrodynamic coefficients on riser floaters using CFD Erico Santos, Pedro Mendes, Bruno Luna PETROBRAS (CENPES/PDEP/TDUT) Ricardo Damian ESSS AGENDA MOTIVATION PROCEADURE OVERVIEW RISER GLOBAL
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Simulation. x i. x i+1. degrees of freedom equations of motion. Newtonian laws gravity. ground contact forces
 Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
CFD FOR OFFSHORE APPLICATIONS USING REFRESCO. Arjen Koop - Senior Project Manager Offshore MARIN
 CFD FOR OFFSHORE APPLICATIONS USING REFRESCO Arjen Koop - Senior Project Manager Offshore MARIN COMPUTATIONAL FLUID DYNAMICS (CFD) Advantages: Quantitative predictions Detailed insight in physical processes
CFD FOR OFFSHORE APPLICATIONS USING REFRESCO Arjen Koop - Senior Project Manager Offshore MARIN COMPUTATIONAL FLUID DYNAMICS (CFD) Advantages: Quantitative predictions Detailed insight in physical processes
Modelling and Simulation for Engineers
 Unit T7: Modelling and Simulation for Engineers Unit code: F/503/7343 QCF level: 6 Credit value: 15 Aim This unit gives learners the opportunity to develop their understanding of Ordinary Differential
Unit T7: Modelling and Simulation for Engineers Unit code: F/503/7343 QCF level: 6 Credit value: 15 Aim This unit gives learners the opportunity to develop their understanding of Ordinary Differential
A05 Steel Catenary Riser Systems
 A05 Steel Catenary Riser Systems Introduction This example contains three examples of steel catenary risers (SCRs). These are: Catenary with Spar Catenary with SemiSub Lazy Wave with FPSO The example also
A05 Steel Catenary Riser Systems Introduction This example contains three examples of steel catenary risers (SCRs). These are: Catenary with Spar Catenary with SemiSub Lazy Wave with FPSO The example also
Lecture «Robot Dynamics»: Kinematic Control
 Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematic Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
SEMI-ACTIVE CONTROL OF BUILDING STRUCTURES USING A NEURO-FUZZY CONTROLLER WITH ACCELERATION FEEDBACK
 Proceedings of the 6th International Conference on Mechanics and Materials in Design, Editors: J.F. Silva Gomes & S.A. Meguid, P.Delgada/Azores, 26-30 July 2015 PAPER REF: 5778 SEMI-ACTIVE CONTROL OF BUILDING
Proceedings of the 6th International Conference on Mechanics and Materials in Design, Editors: J.F. Silva Gomes & S.A. Meguid, P.Delgada/Azores, 26-30 July 2015 PAPER REF: 5778 SEMI-ACTIVE CONTROL OF BUILDING
2008 International ANSYS Conference
 2008 International ANSYS Conference FEM AND FSI SIMULATIONS OF IMPACT LOADS ON GRP SUBSEA COMPOSITE COVERS Kjetil Rognlien, MSc Technical Consultant EDR AS, Norway 2008 ANSYS, Inc. All rights reserved.
2008 International ANSYS Conference FEM AND FSI SIMULATIONS OF IMPACT LOADS ON GRP SUBSEA COMPOSITE COVERS Kjetil Rognlien, MSc Technical Consultant EDR AS, Norway 2008 ANSYS, Inc. All rights reserved.
The Dynamic Response of an Euler-Bernoulli Beam on an Elastic Foundation by Finite Element Analysis using the Exact Stiffness Matrix
 Journal of Physics: Conference Series The Dynamic Response of an Euler-Bernoulli Beam on an Elastic Foundation by Finite Element Analysis using the Exact Stiffness Matrix To cite this article: Jeong Soo
Journal of Physics: Conference Series The Dynamic Response of an Euler-Bernoulli Beam on an Elastic Foundation by Finite Element Analysis using the Exact Stiffness Matrix To cite this article: Jeong Soo
AN ANALYSIS OF THE FINITE ELEMENT METHOD APPLIED ON DYNAMIC MOTION AND MAXIMUM PAYLOAD PLANNING OF FLEXIBLE MANIPULATORS
 Mostafa Nazemizadeh Hamed Rahimi Nohooji ISSN 1333-114 eissn 1849-1391 AN ANALYSIS OF THE FINITE ELEMENT METHOD APPLIED ON DYNAMIC MOTION AND MAXIMUM PAYLOAD PLANNING OF FLEXIBLE MANIPULATORS Summary This
Mostafa Nazemizadeh Hamed Rahimi Nohooji ISSN 1333-114 eissn 1849-1391 AN ANALYSIS OF THE FINITE ELEMENT METHOD APPLIED ON DYNAMIC MOTION AND MAXIMUM PAYLOAD PLANNING OF FLEXIBLE MANIPULATORS Summary This
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Training on OrcaFlex Software
 Training on OrcaFlex Software Duration & Location 3 Days Training in Aryatech Delhi Office ARYATECH MARINE & OFFSHORE SERVICES PVT LTD B-1, HAUZ KHAS, NEW DELHI 110016 Tel: +91 11 46018102, Fax: +91 11
Training on OrcaFlex Software Duration & Location 3 Days Training in Aryatech Delhi Office ARYATECH MARINE & OFFSHORE SERVICES PVT LTD B-1, HAUZ KHAS, NEW DELHI 110016 Tel: +91 11 46018102, Fax: +91 11
Research Article A Computational Investigation of Unsteady Aerodynamics of Insect-Inspired Fixed Wing Micro Aerial Vehicle s 2D Airfoil
 Advances in Aerospace Engineering, Article ID 5449, 7 pages http://dx.doi.org/1.1155/214/5449 Research Article A Computational Investigation of Unsteady Aerodynamics of Insect-Inspired Fixed Wing Micro
Advances in Aerospace Engineering, Article ID 5449, 7 pages http://dx.doi.org/1.1155/214/5449 Research Article A Computational Investigation of Unsteady Aerodynamics of Insect-Inspired Fixed Wing Micro
MSR Team SAVI. Satellite Active Vibration Inverter
 MSR Team SAVI Satellite Active Vibration Inverter Wasseem Bel Patrick Byrne Blake Firner Corey Hyatt Joseph Schmitz Justin Tomasetti Jackson Vlay Benjamin Zatz Project Purpose Cryocoolers create Exported
MSR Team SAVI Satellite Active Vibration Inverter Wasseem Bel Patrick Byrne Blake Firner Corey Hyatt Joseph Schmitz Justin Tomasetti Jackson Vlay Benjamin Zatz Project Purpose Cryocoolers create Exported
Application nr. 2 (Global Analysis) Effects of deformed geometry of the structures. Structural stability of frames. Sway frames and non-sway frames.
 Effects of deformed geometry of the structures. Structural stability of frames. Sway frames and non-sway frames.") Application nr. 2 (Global Analysis) Effects of deformed geometry of the structures. Structural stability of frames. Sway frames and non-sway frames. Object of study: multistorey structure (SAP 2000 Nonlinear)
Application nr. 2 (Global Analysis) Effects of deformed geometry of the structures. Structural stability of frames. Sway frames and non-sway frames. Object of study: multistorey structure (SAP 2000 Nonlinear)
Modelling and Control of Single Link Manipulators for Flexible Operation by using Linearization Techniques
 Research Article International Journal of Current Engineering and Technology ISSN 2277-46 23 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modelling and Control of Single
Research Article International Journal of Current Engineering and Technology ISSN 2277-46 23 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modelling and Control of Single
Control Systems. Introduction to Control System.
 Introduction to Control System chibum@seoultech.ac.kr Lecture Outline History of automatic control Examples of control systems Types of controller Control System Control system: An interconnection of components
Introduction to Control System chibum@seoultech.ac.kr Lecture Outline History of automatic control Examples of control systems Types of controller Control System Control system: An interconnection of components
Best Practices Workshop: Overset Meshing
 Best Practices Workshop: Overset Meshing Overview Introduction to Overset Meshes Range of Application Workflow Demonstrations and Best Practices What are Overset Meshes? Overset meshes are also known as
Best Practices Workshop: Overset Meshing Overview Introduction to Overset Meshes Range of Application Workflow Demonstrations and Best Practices What are Overset Meshes? Overset meshes are also known as
Tutorial 9: Simplified truck model with dummy, airbag and seatbelt
 Tutorial 9 Simplified Truck Model with Dummy and Airbag Problem description Outline Analysis type(s): Element type(s): Materials law(s): Model options: Key results: Prepared by: Date: Version: Frontal
Tutorial 9 Simplified Truck Model with Dummy and Airbag Problem description Outline Analysis type(s): Element type(s): Materials law(s): Model options: Key results: Prepared by: Date: Version: Frontal
Spectral fatigue for FPSO conversion.
 Spectral fatigue for FPSO conversion. Vincent Bonniol, Introduction The required time to build a new FPSO leads to more and more conversions from existing tankers. On demand of several oil companies has
Spectral fatigue for FPSO conversion. Vincent Bonniol, Introduction The required time to build a new FPSO leads to more and more conversions from existing tankers. On demand of several oil companies has
Chapter 5 Modeling and Simulation of Mechanism
 Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
Chapter 5 Modeling and Simulation of Mechanism In the present study, KED analysis of four bar planar mechanism using MATLAB program and ANSYS software has been carried out. The analysis has also been carried
UNMANNED UNDERWATER VEHICLE SIMULATOR ENABLING THE SIMULATION OF MULTI- ROBOT UNDERWATER MISSIONS WITH GAZEBO
 UNMANNED UNDERWATER VEHICLE SIMULATOR ENABLING THE SIMULATION OF MULTI- ROBOT UNDERWATER MISSIONS WITH GAZEBO MUSA MORENA MARCUSSO MANHÃES CORPORATE SECTOR RESEARCH AND ADVANCE ENGINEERING (CR) Robert
UNMANNED UNDERWATER VEHICLE SIMULATOR ENABLING THE SIMULATION OF MULTI- ROBOT UNDERWATER MISSIONS WITH GAZEBO MUSA MORENA MARCUSSO MANHÃES CORPORATE SECTOR RESEARCH AND ADVANCE ENGINEERING (CR) Robert
EFFECTS OF COUPLED HYDRODYNAMIC IN THE PERFORMANCE OF A DP BARGE OPERATING CLOSE TO A FPSO
 Proceedings of the ASME 3th International Conference on Ocean, Offshore and Arctic Engineering OMAE June 9-4,, Rotterdam, The Netherlands OMAE- EFFECTS OF COUPLED HYDRODYNAMIC IN THE PERFORMANCE OF A DP
Proceedings of the ASME 3th International Conference on Ocean, Offshore and Arctic Engineering OMAE June 9-4,, Rotterdam, The Netherlands OMAE- EFFECTS OF COUPLED HYDRODYNAMIC IN THE PERFORMANCE OF A DP
Proposal of Research Activity. PhD Course in Space Sciences, Technologies and Measurements (STMS)
") Proposal of Research Activity PhD Course in Space Sciences, Technologies and Measurements (STMS) Curriculum: Sciences and Technologies for Aeronautics and Satellite Applications (STASA) XXXIV Cycle PhD
Proposal of Research Activity PhD Course in Space Sciences, Technologies and Measurements (STMS) Curriculum: Sciences and Technologies for Aeronautics and Satellite Applications (STASA) XXXIV Cycle PhD
Dynamic Simulation of Rigid Guide Structure Based on ANSYS
 MATEC Web of Conferences 11, 0100 (2017) DOI: 10.1051/ matecconf/2017110100 Dynamic Simulation of Rigid Guide Structure Based on ANSYS ZHANG Xin 1,a and WANG Zhe 2 1 Anhui University of Science and Technology,
MATEC Web of Conferences 11, 0100 (2017) DOI: 10.1051/ matecconf/2017110100 Dynamic Simulation of Rigid Guide Structure Based on ANSYS ZHANG Xin 1,a and WANG Zhe 2 1 Anhui University of Science and Technology,
HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL
 HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL Eric H. Anderson, Michael F. Cash, Jonathan L. Hall and Gregory W. Pettit CSA Engineering Inc., Mountain View, CA Introduction Parallel kinematic manipulators
HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL Eric H. Anderson, Michael F. Cash, Jonathan L. Hall and Gregory W. Pettit CSA Engineering Inc., Mountain View, CA Introduction Parallel kinematic manipulators
APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS
 APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS Jørgen Sverdrup-Thygeson AMOS Days October 2017 Introduction NEEDS FOR SUBSEA INSPECTION, MAINTENANCE AND REPAIR The number of new subsea
APPLICATIONS AND CHALLENGES FOR UNDERWATER SWIMMING MANIPULATORS Jørgen Sverdrup-Thygeson AMOS Days October 2017 Introduction NEEDS FOR SUBSEA INSPECTION, MAINTENANCE AND REPAIR The number of new subsea
MODELING OF A MICRO-GRIPPER COMPLIANT JOINT USING COMSOL MULTIPHYSICS SIMULATION
 MODELING OF A MICRO-GRIPPER COMPLIANT JOINT USING COMSOL MULTIPHYSICS SIMULATION Mihăiţă Nicolae ARDELEANU, Veronica DESPA, Ioan Alexandru IVAN Valahia University from Targoviste E-mail: mihai.ardeleanu@valahia.ro,
MODELING OF A MICRO-GRIPPER COMPLIANT JOINT USING COMSOL MULTIPHYSICS SIMULATION Mihăiţă Nicolae ARDELEANU, Veronica DESPA, Ioan Alexandru IVAN Valahia University from Targoviste E-mail: mihai.ardeleanu@valahia.ro,
Research Article Dynamic Rocker-Bogie: Kinematical Analysis in a High-Speed Traversal Stability Enhancement
 Aerospace Engineering Volume 216, Article ID 518197, 8 pages http://dx.doi.org/1.1155/216/518197 Research Article Dynamic Rocker-Bogie: Kinematical Analysis in a High-Speed Traversal Stability Enhancement
Aerospace Engineering Volume 216, Article ID 518197, 8 pages http://dx.doi.org/1.1155/216/518197 Research Article Dynamic Rocker-Bogie: Kinematical Analysis in a High-Speed Traversal Stability Enhancement
 Control Considerations in the Design of a Parallel Kinematic Machine with Separate Actuation and Metrology Mechanisms Shannon C. Ridgeway Carl D. Crane III Center for Intelligent Machines and Robotics
Control Considerations in the Design of a Parallel Kinematic Machine with Separate Actuation and Metrology Mechanisms Shannon C. Ridgeway Carl D. Crane III Center for Intelligent Machines and Robotics
Design procedures of seismic-isolated container crane at port
 Design procedures of seismic-isolated container crane at port T.Sugano 1, M.Takenobu 1, T.Suzuki 1, and Y.Shiozaki 2 1 Port and Airport Research Institute,Yokosuka, Japan 2 JFE R&D Corporation,Kawasaki,Japan
Design procedures of seismic-isolated container crane at port T.Sugano 1, M.Takenobu 1, T.Suzuki 1, and Y.Shiozaki 2 1 Port and Airport Research Institute,Yokosuka, Japan 2 JFE R&D Corporation,Kawasaki,Japan
Engineering Simulation Software for the Offshore, Marine and Wave/Tidal Renewable Energy Industries. Viscous CFD Applications. Phil Stopford ANSYS UK
 Engineering Simulation Software for the Offshore, Marine and Wave/Tidal Renewable Energy Industries Viscous CFD Applications Phil Stopford ANSYS UK 2011 ANSYS, Inc. All rights reserved. 1 ANSYS, Inc. Proprietary
Engineering Simulation Software for the Offshore, Marine and Wave/Tidal Renewable Energy Industries Viscous CFD Applications Phil Stopford ANSYS UK 2011 ANSYS, Inc. All rights reserved. 1 ANSYS, Inc. Proprietary
SOFTWARE. Sesam user course. 20 February 2017 Wadam - General wave load analysis. Ungraded SAFER, SMARTER, GREENER DNV GL 2014
 SOFTWARE Sesam user course DNV GL 1 SAFER, SMARTER, GREENER Wave Analysis by Diffraction And Morison theory Computation of wave loads and global response 2 Diffraction & radiation theory Structural part
SOFTWARE Sesam user course DNV GL 1 SAFER, SMARTER, GREENER Wave Analysis by Diffraction And Morison theory Computation of wave loads and global response 2 Diffraction & radiation theory Structural part
AORC Technical meeting 2014
 http : //www.cigre.org B1-1090 AORC Technical meeting 2014 Dynamic Installation for Fukushima Floating Offshore Wind Farm Demonstration Project Yasuhiro Tominaga, Hiroshi Nakano, Koji Tomikuda, Masayoshi
http : //www.cigre.org B1-1090 AORC Technical meeting 2014 Dynamic Installation for Fukushima Floating Offshore Wind Farm Demonstration Project Yasuhiro Tominaga, Hiroshi Nakano, Koji Tomikuda, Masayoshi
Application Note. Fiber Alignment Using The HXP50 Hexapod PROBLEM BACKGROUND
 Fiber Alignment Using The HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Fiber Alignment Using The HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Application Note. Fiber Alignment Using the HXP50 Hexapod PROBLEM BACKGROUND
 Fiber Alignment Using the HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Fiber Alignment Using the HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
A Level. A Level Physics. WAVES: Combining Waves (Answers) Edexcel. Name: Total Marks: /30
 Edexcel. Name: Total Marks: /30") Visit http://www.mathsmadeeasy.co.uk/ for more fantastic resources. Edexcel A Level A Level Physics WAVES: Combining Waves (Answers) Name: Total Marks: /30 Maths Made Easy Complete Tuition Ltd 2017 1.
Visit http://www.mathsmadeeasy.co.uk/ for more fantastic resources. Edexcel A Level A Level Physics WAVES: Combining Waves (Answers) Name: Total Marks: /30 Maths Made Easy Complete Tuition Ltd 2017 1.
Active stabilization in robotic vision systems
 Active stabilization in robotic vision systems Vladimir Serebrennyi, Andrei Boshliakov and Georgii Ovsiankin * Bauman Moscow State Technical University, Mechanical Engineering Department, 105005 ul. Baumanskaya
Active stabilization in robotic vision systems Vladimir Serebrennyi, Andrei Boshliakov and Georgii Ovsiankin * Bauman Moscow State Technical University, Mechanical Engineering Department, 105005 ul. Baumanskaya
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS
 MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
Olivier Brüls. Department of Aerospace and Mechanical Engineering University of Liège
 Fully coupled simulation of mechatronic and flexible multibody systems: An extended finite element approach Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be
Fully coupled simulation of mechatronic and flexible multibody systems: An extended finite element approach Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be
Numerical Simulation of Floating Pontoon Breakwater with ANSYS AQWA Software and Validation of the Results with Laboratory Data
 Numerical Simulation of Floating Pontoon Breakwater with ANSYS AQWA Software and Validation of the Results with Laboratory Data Seyed Reza SAMAEI 1, Farhood AZARSINA 2, Mohammad Asadian GHAHFEROKHI 2 1
Numerical Simulation of Floating Pontoon Breakwater with ANSYS AQWA Software and Validation of the Results with Laboratory Data Seyed Reza SAMAEI 1, Farhood AZARSINA 2, Mohammad Asadian GHAHFEROKHI 2 1
Soft Computing Approaches for Effective Utilization of Elastic Energy in Flexible Manipulator
 Soft Computing Approaches for Effective Utilization of Elastic Energy in Flexible Manipulator YIZHI GAI Candidate for the Degree of Doctor Supervisor: YUKINORI KOBAYASHI Division of Human Mechanical System
Soft Computing Approaches for Effective Utilization of Elastic Energy in Flexible Manipulator YIZHI GAI Candidate for the Degree of Doctor Supervisor: YUKINORI KOBAYASHI Division of Human Mechanical System
ITTC Recommended Procedures and Guidelines
 Guideline for VIV Testing Page 1 of 12 Table of Contents 1. PURPOSE OF GUIDELINE... 2 2. TEST TYPES... 4 3. DEFINITIONS OF VARIABLES... 4 4. PARAMETERS... 5 4.1 Scaling... 5 4.2 Model geometry... 6 4.3
Guideline for VIV Testing Page 1 of 12 Table of Contents 1. PURPOSE OF GUIDELINE... 2 2. TEST TYPES... 4 3. DEFINITIONS OF VARIABLES... 4 4. PARAMETERS... 5 4.1 Scaling... 5 4.2 Model geometry... 6 4.3
THE DYNAMIC ANALYSIS OF FLEXIBILITY IN MOBILE ROBOTIC MANIPULATOR SYSTEMS
 Proc. VIII World Congress on the Theroy of Machines and Mechanisms, Prague, Czechoslavakia, July 1991- Revised 1/1/9 THE DYNAMIC ANALYSIS OF FLEXIBILITY IN MOBILE ROBOTIC MANIPULATOR SYSTEMS S. Dubowsky
Proc. VIII World Congress on the Theroy of Machines and Mechanisms, Prague, Czechoslavakia, July 1991- Revised 1/1/9 THE DYNAMIC ANALYSIS OF FLEXIBILITY IN MOBILE ROBOTIC MANIPULATOR SYSTEMS S. Dubowsky
INTERACTIVE LEARNING FRAMEWORK FOR DYNAMIC SIMULATION AND CONTROL OF FLEXIBLE STRUCTURES. M. O. Tokhi and S. Z. Mohd. Hashim 1.
 Session C-T4-3 INTERACTIVE LEARNING FRAMEWORK FOR DYNAMIC SIMULATION AND CONTROL OF FLEXIBLE STRUCTURES M. O. Tokhi and S. Z. Mohd. Hashim The University of Sheffield, Sheffield, United Kingdom, Email:
Session C-T4-3 INTERACTIVE LEARNING FRAMEWORK FOR DYNAMIC SIMULATION AND CONTROL OF FLEXIBLE STRUCTURES M. O. Tokhi and S. Z. Mohd. Hashim The University of Sheffield, Sheffield, United Kingdom, Email:
Parametric Study of Engine Rigid Body Modes
 Parametric Study of Engine Rigid Body Modes Basem Alzahabi and Samir Nashef C. S. Mott Engineering and Science Center Dept. Mechanical Engineering Kettering University 17 West Third Avenue Flint, Michigan,
Parametric Study of Engine Rigid Body Modes Basem Alzahabi and Samir Nashef C. S. Mott Engineering and Science Center Dept. Mechanical Engineering Kettering University 17 West Third Avenue Flint, Michigan,
DESIGN OF AN ADAPTIVE BACKSTEPPING CONTROLLER FOR 2 DOF PARALLEL ROBOT
 DESIGN OF AN ADAPTIVE BACKSTEPPING CONTROLLER FOR 2 DOF PARALLEL ROBOT By JING ZOU A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR
DESIGN OF AN ADAPTIVE BACKSTEPPING CONTROLLER FOR 2 DOF PARALLEL ROBOT By JING ZOU A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR
Modeling and Measuring Dynamic Well Intervention Stack Stress Ed Smalley, SPE, CTES, L.P.; Ken Newman, SPE, CTES, L.P.; Rodney Stephens, SPE, BP
 SPE 94233 Modeling and Measuring Dynamic Well Intervention Stack Stress Ed Smalley, SPE, CTES, L.P.; Ken Newman, SPE, CTES, L.P.; Rodney Stephens, SPE, BP Copyright 2005, Society of Petroleum Engineers
SPE 94233 Modeling and Measuring Dynamic Well Intervention Stack Stress Ed Smalley, SPE, CTES, L.P.; Ken Newman, SPE, CTES, L.P.; Rodney Stephens, SPE, BP Copyright 2005, Society of Petroleum Engineers
Module 1: Introduction to Finite Element Analysis. Lecture 4: Steps in Finite Element Analysis
 25 Module 1: Introduction to Finite Element Analysis Lecture 4: Steps in Finite Element Analysis 1.4.1 Loading Conditions There are multiple loading conditions which may be applied to a system. The load
25 Module 1: Introduction to Finite Element Analysis Lecture 4: Steps in Finite Element Analysis 1.4.1 Loading Conditions There are multiple loading conditions which may be applied to a system. The load
Design and Execution of Model Experiments to Validate Numerical Modelling of 2D Ship Operations in Pack Ice
 Design and Execution of Model Experiments to Validate Numerical Modelling of 2D Ship Operations in Pack Ice Roelof C. Dragt Offshore Engineering Faculty of Mechanical, Maritime and Material Engineering
Design and Execution of Model Experiments to Validate Numerical Modelling of 2D Ship Operations in Pack Ice Roelof C. Dragt Offshore Engineering Faculty of Mechanical, Maritime and Material Engineering
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
Trajectory planning of 2 DOF planar space robot without attitude controller
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 4 (2008) No. 3, pp. 196-204 Trajectory planning of 2 DOF planar space robot without attitude controller Rajkumar Jain, Pushparaj
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 4 (2008) No. 3, pp. 196-204 Trajectory planning of 2 DOF planar space robot without attitude controller Rajkumar Jain, Pushparaj
Finite Element Buckling Analysis Of Stiffened Plates
 International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 10, Issue 2 (February 2014), PP.79-83 Finite Element Buckling Analysis Of Stiffened
International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 10, Issue 2 (February 2014), PP.79-83 Finite Element Buckling Analysis Of Stiffened
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Design & Optimization Fuzzy Logic Controller for General Helicopter Model
 Design & Optimization Fuzzy Logic Controller for General Helicopter Model Hasan A. AbuMeteir Graduated Student of Control Engineering IUG Gaza-Palestine hmeteir@gmail.com Abstract Helicopter aviation is
Design & Optimization Fuzzy Logic Controller for General Helicopter Model Hasan A. AbuMeteir Graduated Student of Control Engineering IUG Gaza-Palestine hmeteir@gmail.com Abstract Helicopter aviation is
Introduction. Chapter 1. Contents. 1.1 Background
 1 Introduction Chapter 1 Contents 1.1 Background 1.2 Two-Part Towing System 1.3 Overall objectives 1.4 Scope of the present study 1.5 Methodology 1.6 Organization of the Report 1.1 Background As an effective
1 Introduction Chapter 1 Contents 1.1 Background 1.2 Two-Part Towing System 1.3 Overall objectives 1.4 Scope of the present study 1.5 Methodology 1.6 Organization of the Report 1.1 Background As an effective
Fluid-structure Interaction by the mixed SPH-FE Method with Application to Aircraft Ditching
 Fluid-structure Interaction by the mixed SPH-FE Method with Application to Aircraft Ditching Paul Groenenboom ESI Group Delft, Netherlands Martin Siemann German Aerospace Center (DLR) Stuttgart, Germany
Fluid-structure Interaction by the mixed SPH-FE Method with Application to Aircraft Ditching Paul Groenenboom ESI Group Delft, Netherlands Martin Siemann German Aerospace Center (DLR) Stuttgart, Germany
DETERMINATION OF THE CRITICAL POSITION DURING THE ASSEMBLY OF THE BOILER HEAT EXCHANGER PACKAGE DUE TO THE STRESSES OF THE AUXILIARY FRAME STRUCTURE
 DETERMINATION OF THE CRITICAL POSITION DURING THE ASSEMBLY OF THE BOILER HEAT EXCHANGER PACKAGE DUE TO THE STRESSES OF THE AUXILIARY FRAME STRUCTURE D. Bučević-Keran 1*, M. Kuna 2, D. Kozak 1, J. Sertić
DETERMINATION OF THE CRITICAL POSITION DURING THE ASSEMBLY OF THE BOILER HEAT EXCHANGER PACKAGE DUE TO THE STRESSES OF THE AUXILIARY FRAME STRUCTURE D. Bučević-Keran 1*, M. Kuna 2, D. Kozak 1, J. Sertić
Robotics 2 Information
 Robotics 2 Information Prof. Alessandro De Luca Robotics 2! 2017/18! Second semester! Monday, February 26 Wednesday, May 30, 2018! Courses of study (code)! Master in Artificial Intelligence and Robotics
Robotics 2 Information Prof. Alessandro De Luca Robotics 2! 2017/18! Second semester! Monday, February 26 Wednesday, May 30, 2018! Courses of study (code)! Master in Artificial Intelligence and Robotics
COMPUTER SIMULATION OF MOVEMENTS OF THE HEXAPOD ROBOT FOR 3D PRINTING OF BUILDING PRODUCTS
 COMPUTER SIMULATION OF MOVEMENTS OF THE HEXAPOD ROBOT FOR 3D PRINTING OF BUILDING PRODUCTS Larisa Alexandrovna Rybak, Dmitry Ivanovich Malyshev, Lusine Hornikova Virabyan and Galina Valeryevna Bocharnikova
COMPUTER SIMULATION OF MOVEMENTS OF THE HEXAPOD ROBOT FOR 3D PRINTING OF BUILDING PRODUCTS Larisa Alexandrovna Rybak, Dmitry Ivanovich Malyshev, Lusine Hornikova Virabyan and Galina Valeryevna Bocharnikova
Static, modal and dynamic behaviour of a stress ribbon footbridge: Experimental and computational results
 Static, modal and dynamic behaviour of a stress ribbon footbridge: Experimental and computational results Castaño, Javier 1 ; Cosido, Óscar 2 ; Pereda, José 3 ; Cacho-Pérez, Mariano 3 ; Lorenzana, Antolín
Static, modal and dynamic behaviour of a stress ribbon footbridge: Experimental and computational results Castaño, Javier 1 ; Cosido, Óscar 2 ; Pereda, José 3 ; Cacho-Pérez, Mariano 3 ; Lorenzana, Antolín
ESTIMATION OF CROSS-FLOW INFLUENCE ON SPRING-MOUNTED CYLINDER IN TRIANGULAR CYLINDER ARRAY.
 ESTIMATION OF CROSS-FLOW INFLUENCE ON SPRING-MOUNTED CYLINDER IN TRIANGULAR CYLINDER ARRAY Sabine Upnere 1,2, Normunds Jekabsons 2,3 1 Riga Technical University, Latvia; 2 Ventspils University College,
ESTIMATION OF CROSS-FLOW INFLUENCE ON SPRING-MOUNTED CYLINDER IN TRIANGULAR CYLINDER ARRAY Sabine Upnere 1,2, Normunds Jekabsons 2,3 1 Riga Technical University, Latvia; 2 Ventspils University College,
Orthoplanar Spring Based Compliant Force/ Torque Sensor for Robot Force Control
 University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 3-21-2017 Orthoplanar Spring Based Compliant Force/ Torque Sensor for Robot Force Control Jerry West University
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School 3-21-2017 Orthoplanar Spring Based Compliant Force/ Torque Sensor for Robot Force Control Jerry West University
Model Tests and Computer Simulations for Njord FPU Gas Module Installation
 Marine Operations Specialty Symposium (MOSS2008), pp.1 20 c 2008 CORE, National University of Singapore, Singapore Model Tests and Computer Simulations for Njord FPU Gas Module Installation Remmelt van
Marine Operations Specialty Symposium (MOSS2008), pp.1 20 c 2008 CORE, National University of Singapore, Singapore Model Tests and Computer Simulations for Njord FPU Gas Module Installation Remmelt van
Performance of railway track system under harmonic loading by finite element method
 Performance of railway track system under harmonic by finite element method Ammar Shuber 1, Mohammed Hamood 1, * and Walaa Jawad 1 1 Building and Construction Engineering Department, University of Technology,
Performance of railway track system under harmonic by finite element method Ammar Shuber 1, Mohammed Hamood 1, * and Walaa Jawad 1 1 Building and Construction Engineering Department, University of Technology,
Electromagnetic Platform Stabilization for Mobile Robots
 Electromagnetic Platform Stabilization for Mobile Robots Eric Deng and Ross Mead University of Southern California 3710 McClintock Avenue, Los Angeles, CA 90089-0781 denge@usc.edu, rossmead@usc.edu Abstract
Electromagnetic Platform Stabilization for Mobile Robots Eric Deng and Ross Mead University of Southern California 3710 McClintock Avenue, Los Angeles, CA 90089-0781 denge@usc.edu, rossmead@usc.edu Abstract
Analysis of floating flexible fish cages with ORCAFLEX/PYTHON
 Analysis of floating flexible fish cages with ORCAFLEX/PYTHON Short summary presentation, September 2017 @ SEMAR AS 2 SUMMARY Purpose of this presentation is to document analysis of floating flexible fish
Analysis of floating flexible fish cages with ORCAFLEX/PYTHON Short summary presentation, September 2017 @ SEMAR AS 2 SUMMARY Purpose of this presentation is to document analysis of floating flexible fish
Active Preload Control of a Redundantly Actuated Stewart Platform for Backlash Prevention
 Active Preload Control of a Redundantly Actuated Stewart Platform for Backlash Prevention Boyin Ding, Benjamin S. Cazzolato, Steven Grainger, Richard M. Stanley, and John J. Costi Abstract There is an
Active Preload Control of a Redundantly Actuated Stewart Platform for Backlash Prevention Boyin Ding, Benjamin S. Cazzolato, Steven Grainger, Richard M. Stanley, and John J. Costi Abstract There is an
Master-Slave Node Method of Processing Plane Node SU Zhi-Gang 1,a, WANG Fei 1,b, LI Qing-Hua 1,c,SHANG Wei-Fang 2,d, ZHANG Zi-Fu 1,e
 International Conference on Advances in Energy, Environment and Chemical Engineering (AEECE-2015) Master-Slave Node Method of Processing Plane Node SU Zhi-Gang 1,a, WANG Fei 1,b, LI Qing-Hua 1,c,SHANG
International Conference on Advances in Energy, Environment and Chemical Engineering (AEECE-2015) Master-Slave Node Method of Processing Plane Node SU Zhi-Gang 1,a, WANG Fei 1,b, LI Qing-Hua 1,c,SHANG
AC : ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY
 AC 2009-130: ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY Alireza Rahrooh, University of Central Florida Alireza Rahrooh is aprofessor of Electrical Engineering Technology at the University of Central
AC 2009-130: ADAPTIVE ROBOT MANIPULATORS IN GLOBAL TECHNOLOGY Alireza Rahrooh, University of Central Florida Alireza Rahrooh is aprofessor of Electrical Engineering Technology at the University of Central
Performance Improvement for Robotic Mechanisms by: Synthesis Design, Dynamic Balancing and Adaptive Control Techniques. Bin Wei
 Performance Improvement for Robotic Mechanisms by: Synthesis Design, Dynamic Balancing and Adaptive Control Techniques By Bin Wei A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree
Performance Improvement for Robotic Mechanisms by: Synthesis Design, Dynamic Balancing and Adaptive Control Techniques By Bin Wei A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree
Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications
 Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications Wei Ren and Randal W. Beard Springer ISBN: 978-1-84800-014-8 Tutorial Slides Prepared by Wei Ren Department of Electrical
Distributed Consensus in Multivehicle Cooperative Control: Theory and Applications Wei Ren and Randal W. Beard Springer ISBN: 978-1-84800-014-8 Tutorial Slides Prepared by Wei Ren Department of Electrical