Graph Overview (1A) Young Won Lim 5/11/18
|
|
|
- Jayson Walton
- 5 years ago
- Views:
Transcription
1 Graph Overview (1A)
2 Copyright (c) Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free ocumentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free ocumentation License". Please send corrections (or suggestions) to youngwlim@hotmail.com. This document was produced by using LibreOffice and Octave.
3 Simple Graph A simple graph is an undirected graph without multiple edges or loops. the edges form a set (rather than a multiset) each edge is an unordered pair of distinct vertices. can define a simple graph to be a set V of vertices together with a set E of edges, F E are 2-element subsets of V B H with n vertices, the degree of every vertex is at most n 1 E C I J G A K Graph Overview (1A) 25
4 Multi-Graph A multigraph, as opposed to a simple graph, is an undirected graph in which multiple edges (and sometimes loops) are allowed. A B B C A C A B C E F G H E E F Graph Overview (1A) 26
5 Multiple Edges multiple edges parallel edges Multi-edges are two or more edges that are incident to the same two vertices A simple graph has no multiple edges. Graph Overview (1A) 27
6 Loop a loop a self-loop a buckle is an edge that connects a vertex to itself. A simple graph contains no loops. Graph Overview (1A) 28
7 Walks For a graph G= (V, E), a walk is defined as a sequence of alternating vertices and edges such as v 0, e 1, v 1, e 2,, e k, v k where each edge e i = {v i 1, v i } The length of this walk is k e 1 e 2 e 3 e k v 0 v 1 v 2 v 3 v k Edges are allowed to be repeated e i =e j for some i, j A B ABCE C ABCCBE E Graph Overview (1A) 29
8 Open / Closed Walks A walk is considered to be closed if the starting vertex is the same as the ending vertex. Otherwise open e 1 e 2 e 3 e k v 0 v 1 v 2 v 3 v k = v 0 A B closed walk ABCA C open walk ABCE open walk ABCCBE E Graph Overview (1A) 31
9 Trails A trail is defined as a walk with no repeated edges. e i e j for all i, j e 1 e 2 e 3 e k v 0 v 1 v 2 v 3 v k A B closed trail closed walk ABCA C open trail open trail open walk open walk ABCE ABCCBE E Graph Overview (1A) 32
10 Paths A path is defined as a open trail with no repeated vertices. e i e j v i v j for all i, j for all i, j e 1 e 2 e 3 e k v 0 v 1 v 2 v 3 v k v 0 A B path closed trail closed walk ABCA C path open trail open walk ABCE path path open trail open trail open walk open walk ABCCBE BEAB C E Graph Overview (1A) 33
11 Cycles A cycle is defined as a closed trail with no repeated vertices except the start/end vertex e i e j v i v j for all i, j for all i, j e 1 e 2 e 3 e k v 0 v 1 v 2 v 3 v k = v 0 A B cycle circuit closed walk ABCA cycle circuit closed walk ABCEBA C E Graph Overview (1A) 34
12 Circuits A circuit is defined as a closed trail with possibly repeated vertices but with no repeated edges e i e j v i = v j for all i, j for some i, j e 1 e 2 e 3 e k v 0 v 1 v 2 v 3 v k = v 0 A B circuit closed walk ABCA circuit closed walk ABCEBA C E Graph Overview (1A) 35
13 Walk, Trail, Path, Circuit, Cycle v 0 v k v 0 = v k open walks trails circuits closed walks path cycle v i v j v i v j e i e j e i e j Graph Overview (1A) 36
14 Walk, Trail, Path, Circuit, Cycle Vertices Edges Walk may may (Closed/Open) repeat repeat Trail may cannot (Open) repeat repeat Path cannot cannot (Open) repeat repeat Circuit may cannot (Closed) repeat repeat Cycle cannot cannot (Closed) repeat repeat Graph Overview (1A) 37
15 References [1] [2]
16
17 Eulerian Cycle (2A)
18 Copyright (c) Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free ocumentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free ocumentation License". Please send corrections (or suggestions) to youngwlim@hotmail.com. This document was produced by using LibreOffice and Octave.
19 Path and Trail A path is a trail in which all vertices are distinct. (except possibly the first and last) A trail is a walk in which all edges are distinct. Vertices Edges Walk may may (Closed/Open) repeat repeat Trail may cannot (Open) repeat repeat Path cannot cannot (Open) repeat repeat Circuit may cannot (Closed) repeat repeat Cycle cannot cannot (Closed) repeat repeat Eulerian Cycles (2A) 3
20 Simple Paths and Cycles Most literatures require that all of the edges and vertices of a path be distinct from one another. But, some do not require this and instead use the term simple path to refer to a path which contains no repeated vertices. A simple cycle may be defined as a closed walk with no repetitions of vertices and edges allowed, other than the repetition of the starting and ending vertex There is considerable variation of terminology!!! Make sure which set of definitions are used... Eulerian Cycles (2A) 4
21 Simple Paths and Cycles trail circuit path cycle path cycle simple path simple cycle Eulerian Cycles (2A) 5
22 Paths and Cycles e 1 e 2 e 3 e k v 0 v 1 v 2 v 3 v k path v 0, e 1, v 1, e 2,, e k, v k path cycle cycle v 0, e 1, v 1, e 2,, e k, v k (v 0 = v k ) path v 0, e 1, v 1, e 2,, e k, v k (v 0 v k ) path cycle cycle v 0, e 1, v 1, e 2,, e k, v k (v 0 = v k ) Eulerian Cycles (2A) 6
23 Euler Cycle Some people reserve the terms path and cycle to mean non-self-intersecting path and cycle. A (potentially) self-intersecting path is known as a trail or an open walk; and a (potentially) self-intersecting cycle, a circuit or a closed walk. This ambiguity can be avoided by using the terms Eulerian trail and Eulerian circuit when self-intersection is allowed no repeating vertices repeating vertices repeating vertices repeating vertices Eulerian Cycles (2A) 7
24 Euler Cycle visits every edge exactly once the existence of Eulerian cycles all vertices in the graph have an even degree connected graphs with all vertices of even degree h ave an Eulerian cycles Eulerian Cycles (2A) 8
25 Euler Path visits every edge exactly once the existence of Eulerian paths all the vertices in the graph have an even degree except only two vertices with an odd degree An Eulerian path starts and ends at different vertices An Eulerian cycle starts and ends at the same vertex. Eulerian Cycles (2A) 9
26 Conditions for Eulerian Cycles and Paths An odd vertex = a vertex with an odd degree An even vertex = a vertex with an even degree # of odd vertices Eulerian Path Eulerian Cycle 0 No Yes 2 Yes No 4,6,8, No No 1,3,5,7, No such graph No such graph If the graph is connected Eulerian Cycles (2A) 10
27 The number of odd vertices # of odd vertices Eulerian Path Eulerian Cycle 0 No Yes 2 Yes No # of odd vertices = 0 # of odd vertices = 2 Eulerian Cycle Eulerian Path No Eulerian Path No Eulerian Cycle Eulerian Cycles (2A) 11
28 Eulerian Graph Eulerian graph : a graph with an Eulerian cycle a graph with every vertex of even degree (the number of odd vertices is 0) These definitions coincide for connected graphs A 2 B 6 A 2 B 4 2 C 4 C E 2 4 E 2 4 Eulerian Cycles (2A) 12

29 Odd egree and Even egree All odd degree vertices All even degree vertices Eulerian Cycles (2A) 13
30 Euler Cycle Example F F B H B H E C I J G ABCEFGHIJK E C I J G A K a path denoted by the edge names A K en.wikipedia.org All even degree vertices Eulerian Cycles Eulerian Cycles (2A) 14
31 Eulerian Cycles (2A) 15 Euler Cycle Example en.wikipedia.org ABCEFGHIJK K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I K J G H F B E A C I
32 Euler Path and Cycle Examples A 2 B 5 A 2 B 6 A 2 B 4 C 3 C 4 C 1 E 2 4 E 2 4 E 2 4 Eulerian Path 1. BBACEBC 2. CCBBAEB Euerian Cycle 1. CCBBAEBC Euerian Cycle 2. CEBBAC a path denoted by the vertex names Eulerian Cycles (2A) 16

33 Eulerian Cycles of Undirected Graphs An undirected graph has an Eulerian cycle if and only if every vertex has even degree, and all of its vertices with nonzero degree belong to a single connected component An undirected graph can be decomposed into edge-disjoint cycles if and only if all of its vertices have even degree. So, a graph has an Eulerian cycle if and only if it can be decomposed into edge-disjoint cycles and its nonzero-degree vertices belong to a single connected component Eulerian Cycles (2A) 17
34 Edge isjoint Cycle ecomposition F B H E C I G J A K All even vertices Euerian Cycle Edge isjoint Cycles Eulerian Cycles (2A) 18
35 Eulerian Paths of Undirected Graphs An undirected graph has an Eulerian trail if and only if exactly zero or two vertices have odd degree, and all of its vertices with nonzero degree belong to a single connected component. Eulerian Cycles (2A) 19
36 Eulerian Cycles of igraphs A directed graph has an Eulerian cycle if and only if every vertex has equal in degree and out degree, and all of its vertices with nonzero degree belong to a single strongly connected component. Equivalently, a directed graph has an Eulerian cycle if and only if it can be decomposed into edge-disjoint directed cycles and all of its vertices with nonzero degree belong to a single strongly connected component. Eulerian Cycles (2A) 20
37 Eulerian Paths of igraphs A directed graph has an Eulerian path if and only if at most one vertex has (out-degree) (in-degree) = 1, at most one vertex has (in-degree) (out-degree) = 1, every other vertex has equal in-degree and out-degree, and all of its vertices with nonzero degree belong to a single connected component of the underlying undirected graph. Eulerian Cycles (2A) 21

38 Seven Bridges of Königsberg The problem was to devise a walk through the city that would cross each of those bridges once and only once. Eulerian Cycles (2A) 22

39 Seven and Eight Bridges Problems 7 bridges problem 8 bridges problem 3 3 A B C A B C E F E F G H 4 Eulerian Path AEHGFCB Eulerian Cycles (2A) 23

40 Nine and Ten Bridges Problems 9 bridges problem 10 bridges problem 4 4 A B C A B C 5 I 4 6 I 4 E F G E J F G H H 5 Eulerian Path 6 Eulerian Cycle EHGFCBAI AEHGFCBJI Eulerian Cycles (2A) 24
41 8 bridges Eulerian Path A B C A B C A B C A B C A B C E F G H E F G H E F G H E F G H E F G H A B C A B C A B C A B C E F G H E F G H E F G H E F G H Eulerian Path AEHGFCB Eulerian Cycles (2A) 25
42 9 bridges Eulerian Path A B C E F G H A B C I E F G H A B C I E F G H A B C I E F G H A B C I I E F G H A B C E F G H A B C I E F G H A B C I E F G H A B C I E F G H A B C I I E F G H Eulerian Path EHGFCBAI Eulerian Cycles (2A) 26
43 10 bridges Eulerian Cycle A B C A B C A B C A B C A B C I I I I I E J F G H E J F G H E J F G H E J F G H E J F G H A B C A B C A B C A B C A B C A B C I I I I I I E J F G H E J F G H E J F G H E J F G H E J F G H E J F G H Eulerian Cycle AEHGFCBJI Eulerian Cycles (2A) 27
44 Fleury s Algorithm To find an Eulerian path or an Eulerian cycle: 1. make sure the graph has either 0 or 2 odd vertices 2. if there are 0 odd vertex, start anywhere. If there are 2 odd vertices, start at one of the two vertices 3. follow edges one at a time. If you have a choice between a bridge and a non-bridge, Always choose the non-bridge 4. stop when you run out of edge Eulerian Cycles (2A) 28
45 Bridges A bridge edge Removing a single edge from a connected graph can make it disconnected Non-bridge edges Loops cannot be bridges Multiple edges cannot be bridges Eulerian Cycles (2A) 29
46 Bridge examples in a graph Eulerian Cycles (2A) 30
47 Bridges must be avoided, if possible B bridge B B A C A C A C E F F F FEACB If there exists other choice other than a bridge The bridge must not be chosen. bridge B A C F Eulerian Cycles (2A) 31
48 Fleury s Algorithm (1) B B B B A C A C A C A C E F E F E F E F FE FEA FEAC B A C E FEACB F Eulerian Cycles (2A) 32
49 Fleury s Algorithm (2) B B B B A C A C A C A C E F E F E F E F FEACB FEACB FEACBC FEACBCF BA: bridge B: bridge CF :bridge F: bridge B: chosen C : chosen CF :chosen no other choice F: chosen no other choice Eulerian Cycles (2A) 33
50 Fleury s Algorithm (3) B B B A C A C A C E F E F E F FEACBCF B: bridge B: chosen no other choice FEACBCFB BA: bridge BA: chosen no other choice Eulerian Cycles (2A) 34
51 References [1] [2]
52 Hamiltonian Cycle (3A)
53 Copyright (c) Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free ocumentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free ocumentation License". Please send corrections (or suggestions) to youngwlim@hotmail.com. This document was produced by using LibreOffice and Octave.
54 Hamiltonian Cycles A Hamiltonian path is a path in an undirected or directed graph that visits each vertex exactly once. A Hamiltonian cycle is a Hamiltonian path that is a cycle. the Hamiltonian path problem is NP-complete. Hamiltonian Cycles (3A) 3


55 Hamiltonian Cycles Hamiltonian Cycles (3A) 4

56 Hamiltonian Cycles Hamiltonian Cycles (3A) 5
57 Hamiltonian Cycles a complete graph with more than two vertices is Hamiltonian every cycle graph is Hamiltonian every tournament has an odd number of Hamiltonian paths every platonic solid, considered as a graph, is Hamiltonian the Cayley graph of a finite Coxeter group is Hamiltonian Hamiltonian Cycles (3A) 6
58 Complete Graphs and Cycle Graphs Hamiltonian Cycles (3A) 7

59 Complete Graphs Hamiltonian Cycles (3A) 8

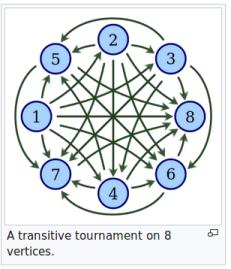
60 Tournament Graphs Hamiltonian Cycles (3A) 9

61 Platonic Solid Graphs Hamiltonian Cycles (3A) 10
62 Hamiltonian Cycles Properties (1) Any Hamiltonian cycle can be converted to a Hamiltonian path by removing one of its edges, but a Hamiltonian path can be extended to Hamiltonian cycle only if its endpoints are adjacent. All Hamiltonian graphs are biconnected, but a biconnected graph need not be Hamiltonian Hamiltonian Cycles (3A) 11
63 Biconnected Graph a biconnected graph is a connected and "nonseparable" graph, meaning that if any one vertex were to be removed, the graph will remain connected. a biconnected graph has no articulation vertices. The property of being 2-connected is equivalent to biconnectivity, with the caveat that the complete graph of two vertices is sometimes regarded as biconnected but not 2-connected. Hamiltonian Cycles (3A) 12
64 Biconnected Graph Examples Hamiltonian Cycles (3A) 13
65 Eulerian Graph An Eulerian graph G : a connected graph in which every vertex has even degree 4 4 An Eulerian graph G necessarily has an Euler cycle, a closed walk passing through each edge of G exactly once A 2 B 6 A 2 B 4 2 C 4 C E 2 4 E 2 4 Hamiltonian Cycles (3A) 14
66 Eulerian Graph (1) The Eulerian cycle corresponds to a Hamiltonian cycle in the line graph L(G), so the line graph of every Eulerian graph is Hamiltonian graph. G L(G) A 1 B A 1 B C C E 4 E 4 Eulerian Cycle ABCECA Hamiltonian Cycle Hamiltonian Cycles (3A) 15
67 Eulerian Graph (2) The Eulerian cycle corresponds to a Hamiltonian cycle in the line graph L(G), so the line graph of every Eulerian graph is Hamiltonian graph. G L(G) A 1 B A 1 B C C E 4 E 4 Eulerian Cycle ABCECA Hamiltonian Cycle Hamiltonian Cycles (3A) 16
68 Eulerian Path (1) The Eulerian path corresponds to a Hamiltonian path in the line graph L(G) G L(G) A 1 B C 5 5 Eulerian Path ABCAC Hamiltonian Path Hamiltonian Cycles (3A) 17
69 Eulerian Path (2) Line graphs may have other Hamiltonian cycles that do not correspond to Euler cycles. G L(G) B A C E F Eulerian Path FEACBCFBA Hamiltonian Path Hamiltonian Cycles (3A) 18
70 Eulerian Path (3) Line graphs may have other Hamiltonian cycles that do not correspond to Euler cycles. G L(G) B A C E F not always Eulerian Cycle X Eulerian Path X Hamiltonian Cycle Hamiltonian Cycles (3A) 19
71 Hamiltonian Cycles Properties (2) This Eulerian cycle corresponds to a Hamiltonian cycle in the line graph L(G), so the line graph of every Eulerian graph is Hamiltonian graph. Line graphs may have other Hamiltonian cycles that do not correspond to Euler paths. The line graph L(G) of every Hamiltonian graph G is itself Hamiltonian, regardless of whether the graph G is Eulerian. Hamiltonian Cycles (3A) 20
72 Line Graphs In the mathematical discipline of graph theory, the line graph of an undirected graph G is another graph L(G) that represents the adjacencies between edges of G. Given a graph G, its line graph L(G) is a graph such that each vertex of L(G) represents an edge of G; and two vertices of L(G) are adjacent if and only if their corresponding edges share a common endpoint ("are incident") in G. That is, it is the intersection graph of the edges of G, representing each edge by the set of its two endpoints. Hamiltonian Cycles (3A) 21
73 Line Graphs Examples Hamiltonian Cycles (3A) 22
74 Hamiltonian Cycles Properties (3) A tournament (with more than two vertices) is Hamiltonian if and only if it is strongly connected. The number of different Hamiltonian cycles in a complete undirected graph on n vertices is (n 1)! / 2 in a complete directed graph on n vertices is (n 1)!. These counts assume that cycles that are the same apart from their starting point are not counted separately. Hamiltonian Cycles (3A) 23

75 Strongly Connected Component a directed graph is said to be strongly connected or diconnected if every vertex is reachable from every other vertex. The strongly connected components or diconnected components of an arbitrary directed graph form a partition into subgraphs that are themselves strongly connected. Hamiltonian Cycles (3A) 24

76 ual Graph the dual graph of a plane graph G is a graph that has a vertex for each face of G. The dual graph has an edge whenever two faces of G are separated from each other by an edge, and a self-loop when the same face appears on both sides of an edge. each edge e of G has a corresponding dual edge, whose endpoints are the dual vertices corresponding to the faces on either side of e. Hamiltonian Cycles (3A) 25
77 ual Graph A B C z X y C ~C (A + B) X C X z y Vdd A B A B GN Hamiltonian Cycles (3A) 26
78 References [1] [2]
79 Shortest Path Problem (4A)
80 Copyright (c) Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free ocumentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free ocumentation License". Please send corrections (or suggestions) to youngwlim@hotmail.com. This document was produced by using LibreOffice and Octave.
 in a graph such that")

81 Shortest Path Problem the shortest path problem is the problem of finding a path between two vertices (or nodes) in a graph such that the sum of the weights of its constituent edges is minimized. Shortest Path Problem (4A) 3
82 Types of Shortest Path Problems The single-pair shortest path problem: to find shortest paths from a source vertex v to a destination vertex w in a graph The single-source shortest path problem: to find shortest paths from a source vertex v to all other vertices in the graph. The single-destination shortest path problem: to find shortest paths from all vertices in the directed graph to a single destination vertex v. This can be reduced to the single-source shortest path problem by reversing the arcs in the directed graph. The all-pairs shortest path problem: to find shortest paths between every pair of vertices v, v' in the graph. Shortest Path Problem (4A) 4
83 ijkstra s Algorithm Example Summary the initial node the current node the visited nodes Shortest Path Problem (4A) 5
84 ijkstra s Algorithm Example (1) Shortest Path Problem (4A) 6
85 ijkstra s Algorithm Example (2) Shortest Path Problem (4A) 7
86 ijkstra s Algorithm Example (3) Shortest Path Problem (4A) 8
87 ijkstra s Algorithm Example (4) Shortest Path Problem (4A) 9
88 ijkstra s Algorithm Example (5) Shortest Path Problem (4A) 10
89 Hamiltonian Cycles Shortest Path Problem (4A) 11
90 ijkstra s Algorithm (1) Let the node at which we are starting be called the initial node. Let the distance of node Y be the distance from the initial node to Y. ijkstra's algorithm will assign some initial distance values and will try to improve them step by step. 1. Mark all nodes unvisited. Create a set of all the unvisited nodes called the unvisited set. 2. Assign to every node a tentative distance value: set it to zero for our initial node and to infinity for all other nodes. Set the initial node as current. Shortest Path Problem (4A) 12
91 ijkstra s Algorithm (2) 3. Remove the current node from the unvisited set For all the unvisited neighbors of the current node, calculate their tentative distances through the current node. Compare the newly calculated tentative distance to the current assigned value and assign the smaller one. For example, if the current node A is marked with a distance of 6, and the edge connecting it with a neighbor B has length 2, then the distance to B through A will be = 8. If B was previously marked with a distance greater than 8 then change it to 8. Otherwise, keep the current value. Newly calculated tentative distance through the current node 6 2 B A current node 8 an unvisited neighbor I Initial node Shortest Path Problem (4A) 13
92 ijkstra s Algorithm (3) 4. After considering all of the neighbors of the current node, mark the current node as visited and remove it from the unvisited set. A visited node will never be checked again. consider all the neighbors of the current node 9 C current node : chosen node with the smallest tentative distance from the unvisited set current node : move to the visited set, after calculating the tentative distances of all the neighbors of the current node B A I current node Initial node Shortest Path Problem (4A) 14
93 ijkstra s Algorithm (4) 5. Move to the next unvisited node with the smallest tentative distances and repeat the above steps which check neighbors and mark visited. 7 E 9 C B A I Initial node current node 8 E 4 10 Shortest Path Problem (4A) 15
94 ijkstra s Algorithm (5) 5-a. If the destination node has been marked visited (when planning a route between two specific nodes) or if the smallest tentative distance among the nodes in the unvisited set is infinity (when planning a complete traversal; occurs when there is no connection between the initial node and remaining unvisited nodes), then stop. The algorithm has finished. 5-b. Otherwise, select the unvisited node that is marked with the smallest tentative distance, set it as the new current node, and go back to step 3. Shortest Path Problem (4A) 16
95 ijkstra s Algorithm Pseudocode 1 1 function ijkstra(graph, source): 2 3 create vertex set Q 4 5 for each vertex v in Graph: // Initialization 6 dist[v] INFINITY // Unknown distance from source to v 7 prev[v] UNEFINE // Previous node in optimal path from source 8 add v to Q // All nodes initially in Q (unvisited nodes) 9 10 dist[source] 0 // istance from source to source while Q is not empty: 13 u vertex in Q with min dist[u] // Node with the least distance 14 // will be selected first 15 remove u from Q for each neighbor v of u: // where v is still in Q. for each v in Q: 18 alt dist[u] + length(u, v) 19 if alt < dist[v]: // A shorter path to v has been found 20 dist[v] alt 21 prev[v] u return dist[], prev[] Shortest Path Problem (4A) 17
96 ijkstra s Algorithm Pseudocode 2 Procedure ijkstra(g: weighted connected simple graph, with all positive weights) {G has vertices a = v 0, v 1,, v n = z and length w(v i, v j ) where w(v i, v j ) = if {v i, v j } is not an edge in G} for i := 1 to n L(v i ) := L(a) := 0 S := { } {the labels are now initialized so that the label of a is 0 and All other labels are, and S is the empty set} while z S u := a vertex not in S with L(u) minimal S := S { u} for all vertices v not in S if L(u) +w(u,v) < L(u) then L(v) := L(u) + w(u,v) {this adds a vertex to S with minimal label and updates the labels of vertices not in S} return L(z) {L(z) = length of a shortest path from a to z} iscrete Mathematics and It s Applications, K. H. Rosen Shortest Path Problem (4A) 18
97 ijkstra Algorithm Pseudocode 2 Example (0) 4 0 a 2 b 1 c d 2 e 6 3 z a b c d e z a b c d e z [ 4 2 ] w(u i,u j ) iscrete Mathematics and It s Applications, K. H. Rosen Shortest Path Problem (4A) 19
98 ijkstra Algorithm Pseudocode 2 Example (1) 4 0 a b d 2 6 z 4 0 a b d 2 6 z 4 0 a 4 5 b d z 2 c 10 e 3 2 c 10 e 3 2 c e S={a} L(a)+w (a, b)=0+4 < L(b)= L(a)+w (a,c)=0+2 < L(c)= L(a)+w (a,d)=0+ = L(d)= L(a)+w (a, e)=0+ = L(e)= L(a)+w (a, z)=0+ = L(z)= iscrete Mathematics and It s Applications, K. H. Rosen Shortest Path Problem (4A) 20
99 ijkstra Algorithm Pseudocode 2 Example (2) 4 0 a 4 5 b d z 4 0 a 4 5 b d z 4 0 a b d z 2 c e c e c e S={a, c} L(c)+w (c,b)=2+1 < L(b)=4 P(a,c, b) < P(a,b) L(c)+w (c, d)=2+8 < L(d)= L(c)+w (c,e)=2+10 < L(e)= L(c)+w (c, z)=2+ = L( z)= iscrete Mathematics and It s Applications, K. H. Rosen Shortest Path Problem (4A) 21
100 ijkstra Algorithm Pseudocode 2 Example (3) 4 0 a b d z 4 0 a b d z 4 0 a b d z 2 c e c e c e S={a, c,b} L(b)+w (b, d)=3+5 < L(d)=10 P(a,c, b, d) < P(a,c, d) L(b)+w (b,e)=3+ > L(e)=12 L(b)+w (b, z)=3+ = L(z)= iscrete Mathematics and It s Applications, K. H. Rosen Shortest Path Problem (4A) 22
101 ijkstra Algorithm Pseudocode 2 Example (4) 4 0 a b d z 4 0 a b d z 4 0 a b d z 2 c e c e c e S={a, c,b,d } L(d)+w (d, e)=8+2 < L(e)=12 P(a,c, b, d, e) < P(a,c, e) L(d)+w (d, z)=8+6 < L(z)= iscrete Mathematics and It s Applications, K. H. Rosen Shortest Path Problem (4A) 23
102 ijkstra Algorithm Pseudocode 2 Example (5) 4 0 a b d z 4 0 a b d z 4 0 a b d z 2 c e c e c e S={a, c,b,d,e} L(e)+w(e, z)=10+3 < L(z)=14 P(a,c, b, d, e, z) < P(a,c, b, d, z) iscrete Mathematics and It s Applications, K. H. Rosen Shortest Path Problem (4A) 24
103 ijkstra Algorithm Pseudocode 2 Example (6) 4 0 a b d z 4 0 a b d z 4 0 a b d z 2 c e c e c e S={a, c,b,d,e, z} iscrete Mathematics and It s Applications, K. H. Rosen Shortest Path Problem (4A) 25
104 References [1] [2]
105 Minimum Spanning Tree (5A)
106 Copyright (c) Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free ocumentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free ocumentation License". Please send corrections (or suggestions) to youngwlim@hotmail.com. This document was produced by using LibreOffice and Octave.
107 Minimum Spanning Tree a subset of the edges of a connected, edge-weighted (un)directed graph that connects all the vertices together, without any cycles and with the minimum possible total edge weight. a spanning tree whose sum of edge weights is as small as possible. More generally, any edge-weighted undirected graph (not necessarily connected) has a minimum spanning forest, which is a union of the minimum spanning trees for its connected components. Minimum Spanning Tree (5A) 3
108 Types of Shortest Path Problems Minimum Spanning Tree (5A) 4
109 Properties (1) Possible multiplicity If there are n vertices in the graph, then each spanning tree has n 1 edges. Uniquenss If each edge has a distinct weight then there will be only one, unique minimum spanning tree. this is true in many realistic situations Minimum-cost subgraph If the weights are positive, then a minimum spanning tree is in fact a minimum-cost subgraph connecting all vertices, since subgraphs containing cycles necessarily have more total weight. Minimum Spanning Tree (5A) 5
110 Properties (2) Cycle Property For any cycle C in the graph, if the weight of an edge e of C is larger than the individual weights of all other edges of C, then this edge cannot belong to a MST. Cut property For any cut C of the graph, if the weight of an edge e in the cut-set of C is strictly smaller than the weights of all other edges of the cut-set of C, then this edge belongs to all MSTs of the graph. Minimum Spanning Tree (5A) 6
111 Properties (3) Minimum-cost edge If the minimum cost edge e of a graph is unique, then this edge is included in any MST. Contraction If T is a tree of MST edges, then we can contract T into a single vertex while maintaining the invariant that the MST of the contracted graph plus T gives the MST for the graph before contraction. Minimum Spanning Tree (5A) 7
112 Cut property examples Minimum Spanning Tree (5A) 8
113 Borůvka's algorithm Input: A graph G whose edges have distinct weights Initialize a forest F to be a set of one-vertex trees, one for each vertex of the graph. While F has more than one component: Find the connected components of F and label each vertex of G by its component Initialize the cheapest edge for each component to "None" For each edge uv of G: If u and v have different component labels: If uv is cheaper than the cheapest edge for the component of u: Set uv as the cheapest edge for the component of u If uv is cheaper than the cheapest edge for the component of v: Set uv as the cheapest edge for the component of v For each component whose cheapest edge is not "None": Add its cheapest edge to F Output: F is the minimum spanning forest of G. Minimum Spanning Tree (5A) 9

114 Borůvka's algorithm examples (1) Minimum Spanning Tree (5A) 10
115 Borůvka's algorithm examples (2) Minimum Spanning Tree (5A) 11

116 Borůvka's algorithm examples (3) Minimum Spanning Tree (5A) 12
117 Borůvka's algorithm examples (4) Minimum Spanning Tree (5A) 13
118 Kruskal's algorithm KRUSKAL(G): 1 A = 2 foreach v G.V: 3 MAKE-SET(v) 4 foreach (u, v) in G.E ordered by weight(u, v), increasing: 5 if FIN-SET(u) FIN-SET(v): 6 A = A {(u, v)} 7 UNION(u, v) 8 return A Scan all edges in increasing weight order; if an edge is safe, add it to A Minimum Spanning Tree (5A) 14
119 Kruskal's algorithm examples (1) { 5, 5, 6, 7, 7, 8, 8, 9, 9, 11, 15} { 5, 5, 6, 7, 7, 8, 8, 9, 9, 11, 15} Minimum Spanning Tree (5A) 15
120 Kruskal's algorithm examples (2) { 5, 5, 6, 7, 7, 8, 8, 9, 9, 11, 15} { 5, 5, 6, 7, 7, 8, 8, 9, 9, 11, 15} Minimum Spanning Tree (5A) 16
121 Kruskal's algorithm examples (3) { 5, 5, 6, 7, 7, 8, 8, 9, 9, 11, 15} { 5, 5, 6, 7, 7, 8, 8, 9, 9, 11, 15} Minimum Spanning Tree (5A) 17
122 Kruskal's algorithm examples (4) {2,3,4,5,8,10, 12,14,16, 18,26, 30} Minimum Spanning Tree (5A) 18
123 Prim's algorithm a greedy algorithm that finds a minimum spanning tree for a weighted undirected graph. operates by building this tree one vertex at a time, from an arbitrary starting vertex, at each step adding the cheapest possible connection from the tree to another vertex. Repeatedly add a safe edge to the tree 1. Initialize a tree with a single vertex, chosen arbitrarily from the graph. 2. Grow the tree by one edge: of the edges that connect the tree to vertices not yet in the tree, find the minimum-weight edge, and transfer it to the tree. 3. Repeat step 2 (until all vertices are in the tree). Minimum Spanning Tree (5A) 19
124 Prim's algorithm 1. Associate with each vertex v of the graph a number C[v] (the cheapest cost of a connection to v) and an edge E[v] (the cheapest edge). Initial values: C[v] = +, E[v] = flag for no connection 2. Initialize an empty forest F and a set Q of vertices that have not yet been included in F 3. Repeat the following steps until Q is empty: a. Find and remove a vertex v from Q having the minimum possible value of C[v] b. Add v to F and, if E[v] is not the special flag value, also add E[v] to F c. Loop over the edges vw connecting v to other vertices w. For each such edge, if w still belongs to Q and vw has smaller weight than C[w], perform the following steps: I) Set C[w] to the cost of edge vw II) Set E[w] to point to edge vw. Return F Minimum Spanning Tree (5A) 20

125 Prim's algorithm Prim's algorithm starting at vertex A. In the third step, edges B and AB both have weight 2, so B is chosen arbitrarily. After that step, AB is no longer a candidate for addition to the tree because it links two nodes that are already in the tree. Minimum Spanning Tree (5A) 21
126 Prim's algorithm examples (1) {5,6, 9,15} Minimum Spanning Tree (5A) 22
127 Prim's algorithm examples (2) Minimum Spanning Tree (5A) 23
128 Prim's algorithm examples (3) Minimum Spanning Tree (5A) 24
129 Prim's algorithm examples (4) {2,3,4,5,8,10, 12,14,16, 18,26, 30} Minimum Spanning Tree (5A) 25
130 References [1] [2]
131 Tree Traversal (1A)
132 Copyright (c) Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free ocumentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in the section entitled "GNU Free ocumentation License". Please send corrections (or suggestions) to youngwlim@hotmail.com. This document was produced by using LibreOffice and Octave.
133 Infix, Prefix, Postfix Notations Infix Notation Prefix Notation Postfix Notation A + B + A B A B + (A + B) * C * + A B C A B + C * A * (B + C) * A + B C A B C + * A / B + C / + / A B / C A B / C / + ((A + B) * C) * + A B C A B + C * Tree (10A) 4
134 Infix, Prefix, Postfix Notations and Binary Trees Infix Notation Prefix Notation Postfix Notation A + B + A B A B + + (A + B) * C * + A B C A B + C * A * (B + C) * A + B C A B C + * A B A / B + C / + / A B / C A B / C / + ((A + B) * C) * + A B C A B + C * * * + + C A + / / * A B B C A B C + C A B Tree (10A) 5
135 In-Order, Pre-Order, Post-Order Binary Tree Traversals epth First Search Pre-Order In-order Post-Order * + / Breadth First Search a d e b c pre-order post-order (a*(b-c))+(d/e) in-order a * b c + d / e Infix notation + * a b c / d e Prefix notation a b c * d e / + Postfix notation Tree (10A) 6
136 Pre-Order Binary Tree Traversals + * / a d e b c (a*(b-c))+(d/e) a * b c + d / e Infix notation + * a b c / d e Prefix notation a b c * d e / + Postfix notation Tree (10A) 7
137 In-Order Binary Tree Traversals + * / a d e b c (a*(b-c))+(d/e) a * b c + d / e Infix notation + * a b c / d e Prefix notation a b c * d e / + Postfix notation Tree (10A) 8
138 Post-Order Binary Tree Traversals + * / a d e b c (a*(b-c))+(d/e) a * b c + d / e Infix notation + * a b c / d e Prefix notation a b c * d e / + Postfix notation Tree (10A) 9
139 Tree Traversal epth First Search Pre-Order In-order Post-Order Breadth First Search pre-order post-order in-order Tree (10A) 10
140 Pre-Order pre-order function Check if the current node is empty / null. isplay the data part of the root (or current node). Traverse the left subtree by recursively calling the pre-order function. Traverse the right subtree by recursively calling the pre-order function. FBACEGIH pre-order post-order in-order Tree (10A) 11
141 In-Order in-order function Check if the current node is empty / null. Traverse the left subtree by recursively calling the in-order function. isplay the data part of the root (or current node). Traverse the right subtree by recursively calling the in-order function. ABCEFGHI pre-order post-order in-order Tree (10A) 12
. ACEBHIGH pre-order post-order in-order https://en.")
142 Post-Order post-order function Check if the current node is empty / null. Traverse the left subtree by recursively calling the post-order function. Traverse the right subtree by recursively calling the post-order function. isplay the data part of the root (or current node). ACEBHIGH pre-order post-order in-order Tree (10A) 13
143 Recursive Algorithms preorder(node) if (node = null) return visit(node) preorder(node.left) preorder(node.right) inorder(node) if (node = null) return inorder(node.left) visit(node) inorder(node.right) postorder(node) if (node = null) return postorder(node.left) postorder(node.right) visit(node) Tree (10A) 14
144 Iterative Algorithms iterativepreorder(node) if (node = null) return s empty stack s.push(node) while (not s.isempty()) node s.pop() visit(node) // right child is pushed first // so that left is processed first if (node.right null) s.push(node.right) if (node.left null) s.push(node.left) iterativeinorder(node) s empty stack while (not s.isempty() or node null) if (node null) s.push(node) node node.left else node s.pop() visit(node) node node.right iterativepostorder(node) s empty stack lastnodevisited null while (not s.isempty() or node null) if (node null) s.push(node) node node.left else peeknode s.peek() // if right child exists and traversing // node from left child, then move right if (peeknode.right null and lastnodevisited peeknode.right) node peeknode.right else visit(peeknode) lastnodevisited s.pop() Tree (10A) 15
145 Stack Tree (10A) 16

146 Queue g Tree (10A) 17
147 Search Algorithms FS (epth First Search) BFS (Breadth First Search) /epth-first_search Tree (10A) 18
 do if vertex w is not labeled as discovered then recursively call FS(G,w) A non-recuursive implementation of FS: procedure FS-iterative(G,v): let S be a stack S.")
148 FS Algorithm A recursive implementation of FS: FS (epth First Search) procedure FS(G,v): label v as discovered for all edges from v to w in G.adjacentEdges(v) do if vertex w is not labeled as discovered then recursively call FS(G,w) A non-recuursive implementation of FS: procedure FS-iterative(G,v): let S be a stack S.push(v) while S is not empty v = S.pop() if v is not labeled as discovered: label v as discovered for all edges from v to w in G.adjacentEdges(v) do S.push(w) /epth-first_search Tree (10A) 19
149 Search Algorithms FS (epth First Search) BFS (Breadth First Search) /epth-first_search Tree (10A) 20
150 BFS Algorithm Breadth-First-Search(Graph, root): create empty set S create empty queue Q BFS (Breadth First Search) add root to S Q.enqueue(root) while Q is not empty: current = Q.dequeue() if current is the goal: return current for each node n that is adjacent to current: if n is not in S: add n to S n.parent = current Q.enqueue(n) /epth-first_search Tree (10A) 21
151 In-Order a pre-order post-order b c d in-order pre-order post-order e f g h i in-order j k l m Rosen n o p Tree (10A) 22
152 Ternary Tree a-b-e-j-k-n-o-p-f-c-d-g-l-m-h-i a b c d e f g h i j k l m Rosen n o p Tree (10A) 23
153 In-Order j-e-n-k-o-p-b-f-a-c-l-g-m-d-h-i a b c d e f g h i j k l m Rosen n o p Tree (10A) 24
154 Post-Order j-n-o-p-k-e-f-b-c-l-m-g-h-i-d-a a b c d e f g h i j k l m Rosen n o p Tree (10A) 25
155 Ternary Ternary Etymology Late Latin ternarius ( consisting of three things ), from terni ( three each ). Adjective ternary (not comparable) Made up of three things; treble, triadic, triple, triplex Arranged in groups of three (mathematics) To the base three [quotations ] (mathematics) Having three variables The sequence continues with quaternary, quinary, senary, septenary, octonary, nonary, and denary, although most of these terms are rarely used. There's no word relating to the number eleven but there is one that relates to the number twelve: duodenary. Tree (10A) 26
156 References [1] [2]
Tree Traversal (1A) Young Won Lim 6/6/18
 Young Won Lim 6/6/18") Tree Traversal (1A) Copyright (c) 2015-2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any
Tree Traversal (1A) Copyright (c) 2015-2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any
Tree Traversal (1A) Young Won Lim 5/26/18
 Young Won Lim 5/26/18") Tree Traversal (1A) Copyright (c) 2015-2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any
Tree Traversal (1A) Copyright (c) 2015-2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any
Minimum Spanning Tree (5A) Young Won Lim 5/11/18
 Young Won Lim 5/11/18") Minimum Spanning Tree (5A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
Minimum Spanning Tree (5A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
Eulerian Cycle (2A) Walk : vertices may repeat, edges may repeat (closed or open) Trail: vertices may repeat, edges cannot repeat (open)
 Walk : vertices may repeat, edges may repeat (closed or open) Trail: vertices may repeat, edges cannot repeat (open)") Eulerian Cycle (2A) Walk : vertices may repeat, edges may repeat (closed or open) Trail: vertices may repeat, edges cannot repeat (open) circuit : vertices my repeat, edges cannot repeat (closed) path
Eulerian Cycle (2A) Walk : vertices may repeat, edges may repeat (closed or open) Trail: vertices may repeat, edges cannot repeat (open) circuit : vertices my repeat, edges cannot repeat (closed) path
Eulerian Cycle (2A) Young Won Lim 4/26/18
 Young Won Lim 4/26/18") Eulerian Cycle (2A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any
Eulerian Cycle (2A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any
Eulerian Cycle (2A) Young Won Lim 5/25/18
 Young Won Lim 5/25/18") Eulerian Cycle (2A) 5/25/18 Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
Eulerian Cycle (2A) 5/25/18 Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
Graph Overview (1A) Young Won Lim 5/9/18
 Young Won Lim 5/9/18") Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published
Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published
Graph (1A) Young Won Lim 4/19/18
 Young Won Lim 4/19/18") Graph (1A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version
Graph (1A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version
Eulerian Cycle (2A) Young Won Lim 5/11/18
 Young Won Lim 5/11/18") ulerian ycle (2) opyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the NU ree ocumentation License, Version 1.2 or any later
ulerian ycle (2) opyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the NU ree ocumentation License, Version 1.2 or any later
Eulerian Cycle (2A) Young Won Lim 5/25/18
 Young Won Lim 5/25/18") ulerian ycle (2) opyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU ree ocumentation License, Version 1.2 or any later
ulerian ycle (2) opyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU ree ocumentation License, Version 1.2 or any later
DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI. Department of Computer Science and Engineering CS6301 PROGRAMMING DATA STRUCTURES II
 DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI Department of Computer Science and Engineering CS6301 PROGRAMMING DATA STRUCTURES II Anna University 2 & 16 Mark Questions & Answers Year / Semester: II / III
DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI Department of Computer Science and Engineering CS6301 PROGRAMMING DATA STRUCTURES II Anna University 2 & 16 Mark Questions & Answers Year / Semester: II / III
Minimum-Spanning-Tree problem. Minimum Spanning Trees (Forests) Minimum-Spanning-Tree problem
 Minimum-Spanning-Tree problem") Minimum Spanning Trees (Forests) Given an undirected graph G=(V,E) with each edge e having a weight w(e) : Find a subgraph T of G of minimum total weight s.t. every pair of vertices connected in G are
Minimum Spanning Trees (Forests) Given an undirected graph G=(V,E) with each edge e having a weight w(e) : Find a subgraph T of G of minimum total weight s.t. every pair of vertices connected in G are
Planar Graph (7A) Young Won Lim 5/21/18
 Young Won Lim 5/21/18") Planar Graph (7A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later
Planar Graph (7A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later
Planar Graph (7A) Young Won Lim 6/20/18
 Young Won Lim 6/20/18") Planar Graph (7A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later
Planar Graph (7A) Copyright (c) 2015 2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later
Minimum Spanning Trees My T. UF
 Introduction to Algorithms Minimum Spanning Trees @ UF Problem Find a low cost network connecting a set of locations Any pair of locations are connected There is no cycle Some applications: Communication
Introduction to Algorithms Minimum Spanning Trees @ UF Problem Find a low cost network connecting a set of locations Any pair of locations are connected There is no cycle Some applications: Communication
11/22/2016. Chapter 9 Graph Algorithms. Introduction. Definitions. Definitions. Definitions. Definitions
 Introduction Chapter 9 Graph Algorithms graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 2 Definitions an undirected graph G = (V, E) is
Introduction Chapter 9 Graph Algorithms graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 2 Definitions an undirected graph G = (V, E) is
Chapter 9 Graph Algorithms
 Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 3 Definitions an undirected graph G = (V, E)
Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be slow if not careful with data structures 3 Definitions an undirected graph G = (V, E)
Konigsberg Bridge Problem
 Graphs Konigsberg Bridge Problem c C d g A Kneiphof e D a B b f c A C d e g D a b f B Euler s Graph Degree of a vertex: the number of edges incident to it Euler showed that there is a walk starting at
Graphs Konigsberg Bridge Problem c C d g A Kneiphof e D a B b f c A C d e g D a b f B Euler s Graph Degree of a vertex: the number of edges incident to it Euler showed that there is a walk starting at
Greedy Algorithms. At each step in the algorithm, one of several choices can be made.
 Greedy Algorithms At each step in the algorithm, one of several choices can be made. Greedy Strategy: make the choice that is the best at the moment. After making a choice, we are left with one subproblem
Greedy Algorithms At each step in the algorithm, one of several choices can be made. Greedy Strategy: make the choice that is the best at the moment. After making a choice, we are left with one subproblem
Trees Rooted Trees Spanning trees and Shortest Paths. 12. Graphs and Trees 2. Aaron Tan November 2017
 12. Graphs and Trees 2 Aaron Tan 6 10 November 2017 1 10.5 Trees 2 Definition Definition Definition: Tree A graph is said to be circuit-free if, and only if, it has no circuits. A graph is called a tree
12. Graphs and Trees 2 Aaron Tan 6 10 November 2017 1 10.5 Trees 2 Definition Definition Definition: Tree A graph is said to be circuit-free if, and only if, it has no circuits. A graph is called a tree
Chapter 9 Graph Algorithms
 Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be if not careful with data structures 3 Definitions an undirected graph G = (V, E) is a
Chapter 9 Graph Algorithms 2 Introduction graph theory useful in practice represent many real-life problems can be if not careful with data structures 3 Definitions an undirected graph G = (V, E) is a
Graph Theory. Part of Texas Counties.
 Graph Theory Part of Texas Counties. We would like to visit each of the above counties, crossing each county only once, starting from Harris county. Is this possible? This problem can be modeled as a graph.
Graph Theory Part of Texas Counties. We would like to visit each of the above counties, crossing each county only once, starting from Harris county. Is this possible? This problem can be modeled as a graph.
Theory of Computing. Lecture 10 MAS 714 Hartmut Klauck
 Theory of Computing Lecture 10 MAS 714 Hartmut Klauck Seven Bridges of Königsberg Can one take a walk that crosses each bridge exactly once? Seven Bridges of Königsberg Model as a graph Is there a path
Theory of Computing Lecture 10 MAS 714 Hartmut Klauck Seven Bridges of Königsberg Can one take a walk that crosses each bridge exactly once? Seven Bridges of Königsberg Model as a graph Is there a path
Outline. Graphs. Divide and Conquer.
 GRAPHS COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Outline Graphs.
GRAPHS COMP 321 McGill University These slides are mainly compiled from the following resources. - Professor Jaehyun Park slides CS 97SI - Top-coder tutorials. - Programming Challenges books. Outline Graphs.
COP 4531 Complexity & Analysis of Data Structures & Algorithms
 COP 4531 Complexity & Analysis of Data Structures & Algorithms Lecture 9 Minimum Spanning Trees Thanks to the text authors who contributed to these slides Why Minimum Spanning Trees (MST)? Example 1 A
COP 4531 Complexity & Analysis of Data Structures & Algorithms Lecture 9 Minimum Spanning Trees Thanks to the text authors who contributed to these slides Why Minimum Spanning Trees (MST)? Example 1 A
Chapter 9 Graph Algorithms
 Introduction graph theory useful in practice represent many real-life problems can be if not careful with data structures Chapter 9 Graph s 2 Definitions Definitions an undirected graph is a finite set
Introduction graph theory useful in practice represent many real-life problems can be if not careful with data structures Chapter 9 Graph s 2 Definitions Definitions an undirected graph is a finite set
22 Elementary Graph Algorithms. There are two standard ways to represent a
 VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
MATH 363 Final Wednesday, April 28. Final exam. You may use lemmas and theorems that were proven in class and on assignments unless stated otherwise.
 Final exam This is a closed book exam. No calculators are allowed. Unless stated otherwise, justify all your steps. You may use lemmas and theorems that were proven in class and on assignments unless stated
Final exam This is a closed book exam. No calculators are allowed. Unless stated otherwise, justify all your steps. You may use lemmas and theorems that were proven in class and on assignments unless stated
22 Elementary Graph Algorithms. There are two standard ways to represent a
 VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
Graph and Digraph Glossary
 1 of 15 31.1.2004 14:45 Graph and Digraph Glossary A B C D E F G H I-J K L M N O P-Q R S T U V W-Z Acyclic Graph A graph is acyclic if it contains no cycles. Adjacency Matrix A 0-1 square matrix whose
1 of 15 31.1.2004 14:45 Graph and Digraph Glossary A B C D E F G H I-J K L M N O P-Q R S T U V W-Z Acyclic Graph A graph is acyclic if it contains no cycles. Adjacency Matrix A 0-1 square matrix whose
Minimum Spanning Trees
 Minimum Spanning Trees Overview Problem A town has a set of houses and a set of roads. A road connects and only houses. A road connecting houses u and v has a repair cost w(u, v). Goal: Repair enough (and
Minimum Spanning Trees Overview Problem A town has a set of houses and a set of roads. A road connects and only houses. A road connecting houses u and v has a repair cost w(u, v). Goal: Repair enough (and
Undirected Graphs. Hwansoo Han
 Undirected Graphs Hwansoo Han Definitions Undirected graph (simply graph) G = (V, E) V : set of vertexes (vertices, nodes, points) E : set of edges (lines) An edge is an unordered pair Edge (v, w) = (w,
Undirected Graphs Hwansoo Han Definitions Undirected graph (simply graph) G = (V, E) V : set of vertexes (vertices, nodes, points) E : set of edges (lines) An edge is an unordered pair Edge (v, w) = (w,
UNIT 5 GRAPH. Application of Graph Structure in real world:- Graph Terminologies:
 UNIT 5 CSE 103 - Unit V- Graph GRAPH Graph is another important non-linear data structure. In tree Structure, there is a hierarchical relationship between, parent and children that is one-to-many relationship.
UNIT 5 CSE 103 - Unit V- Graph GRAPH Graph is another important non-linear data structure. In tree Structure, there is a hierarchical relationship between, parent and children that is one-to-many relationship.
Lecture 10. Elementary Graph Algorithm Minimum Spanning Trees
 Lecture 10. Elementary Graph Algorithm Minimum Spanning Trees T. H. Cormen, C. E. Leiserson and R. L. Rivest Introduction to Algorithms, 3rd Edition, MIT Press, 2009 Sungkyunkwan University Hyunseung Choo
Lecture 10. Elementary Graph Algorithm Minimum Spanning Trees T. H. Cormen, C. E. Leiserson and R. L. Rivest Introduction to Algorithms, 3rd Edition, MIT Press, 2009 Sungkyunkwan University Hyunseung Choo
Binary Search Tree (2A) Young Won Lim 5/17/18
 Young Won Lim 5/17/18") Binary Search Tree (2A) Copyright (c) 2015-2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or
Binary Search Tree (2A) Copyright (c) 2015-2018 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or
CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS
 CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS 1 UNIT I INTRODUCTION CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS 1. Define Graph. A graph G = (V, E) consists
CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS 1 UNIT I INTRODUCTION CS6702 GRAPH THEORY AND APPLICATIONS 2 MARKS QUESTIONS AND ANSWERS 1. Define Graph. A graph G = (V, E) consists
Varying Applications (examples)
") Graph Theory Varying Applications (examples) Computer networks Distinguish between two chemical compounds with the same molecular formula but different structures Solve shortest path problems between cities
Graph Theory Varying Applications (examples) Computer networks Distinguish between two chemical compounds with the same molecular formula but different structures Solve shortest path problems between cities
Basic Graph Definitions
 CMSC 341 Graphs Basic Graph Definitions A graph G = (V,E) consists of a finite set of vertices, V, and a finite set of edges, E. Each edge is a pair (v,w) where v, w V. V and E are sets, so each vertex
CMSC 341 Graphs Basic Graph Definitions A graph G = (V,E) consists of a finite set of vertices, V, and a finite set of edges, E. Each edge is a pair (v,w) where v, w V. V and E are sets, so each vertex
Decreasing a key FIB-HEAP-DECREASE-KEY(,, ) 3.. NIL. 2. error new key is greater than current key 6. CASCADING-CUT(, )
 3.. NIL. 2. error new key is greater than current key 6. CASCADING-CUT(, )") Decreasing a key FIB-HEAP-DECREASE-KEY(,, ) 1. if >. 2. error new key is greater than current key 3.. 4.. 5. if NIL and.
Decreasing a key FIB-HEAP-DECREASE-KEY(,, ) 1. if >. 2. error new key is greater than current key 3.. 4.. 5. if NIL and.
Elements of Graph Theory
 Elements of Graph Theory Quick review of Chapters 9.1 9.5, 9.7 (studied in Mt1348/2008) = all basic concepts must be known New topics we will mostly skip shortest paths (Chapter 9.6), as that was covered
Elements of Graph Theory Quick review of Chapters 9.1 9.5, 9.7 (studied in Mt1348/2008) = all basic concepts must be known New topics we will mostly skip shortest paths (Chapter 9.6), as that was covered
CSC Intro to Intelligent Robotics, Spring Graphs
 CSC 445 - Intro to Intelligent Robotics, Spring 2018 Graphs Graphs Definition: A graph G = (V, E) consists of a nonempty set V of vertices (or nodes) and a set E of edges. Each edge has either one or two
CSC 445 - Intro to Intelligent Robotics, Spring 2018 Graphs Graphs Definition: A graph G = (V, E) consists of a nonempty set V of vertices (or nodes) and a set E of edges. Each edge has either one or two
8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))
![8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))](/thumbs/89/97773603.jpg "8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))") DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING EC6301 OBJECT ORIENTED PROGRAMMING AND DATA STRUCTURES UNIT IV NONLINEAR DATA STRUCTURES Part A 1. Define Tree [N/D 08]
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING EC6301 OBJECT ORIENTED PROGRAMMING AND DATA STRUCTURES UNIT IV NONLINEAR DATA STRUCTURES Part A 1. Define Tree [N/D 08]
Chapter 14. Graphs Pearson Addison-Wesley. All rights reserved 14 A-1
 Chapter 14 Graphs 2011 Pearson Addison-Wesley. All rights reserved 14 A-1 Terminology G = {V, E} A graph G consists of two sets A set V of vertices, or nodes A set E of edges A subgraph Consists of a subset
Chapter 14 Graphs 2011 Pearson Addison-Wesley. All rights reserved 14 A-1 Terminology G = {V, E} A graph G consists of two sets A set V of vertices, or nodes A set E of edges A subgraph Consists of a subset
Introduction III. Graphs. Motivations I. Introduction IV
 Introduction I Graphs Computer Science & Engineering 235: Discrete Mathematics Christopher M. Bourke cbourke@cse.unl.edu Graph theory was introduced in the 18th century by Leonhard Euler via the Königsberg
Introduction I Graphs Computer Science & Engineering 235: Discrete Mathematics Christopher M. Bourke cbourke@cse.unl.edu Graph theory was introduced in the 18th century by Leonhard Euler via the Königsberg
2pt 0em. Computer Science & Engineering 423/823 Design and Analysis of Algorithms. Lecture 04 Minimum-Weight Spanning Trees (Chapter 23)
") 2pt 0em Computer Science & Engineering 423/823 Design and of s Lecture 04 Minimum-Weight Spanning Trees (Chapter 23) Stephen Scott (Adapted from Vinodchandran N. Variyam) 1 / 18 Given a connected, undirected
2pt 0em Computer Science & Engineering 423/823 Design and of s Lecture 04 Minimum-Weight Spanning Trees (Chapter 23) Stephen Scott (Adapted from Vinodchandran N. Variyam) 1 / 18 Given a connected, undirected
CSE 100 Minimum Spanning Trees Prim s and Kruskal
 CSE 100 Minimum Spanning Trees Prim s and Kruskal Your Turn The array of vertices, which include dist, prev, and done fields (initialize dist to INFINITY and done to false ): V0: dist= prev= done= adj:
CSE 100 Minimum Spanning Trees Prim s and Kruskal Your Turn The array of vertices, which include dist, prev, and done fields (initialize dist to INFINITY and done to false ): V0: dist= prev= done= adj:
GRAPHS, GRAPH MODELS, GRAPH TERMINOLOGY, AND SPECIAL TYPES OF GRAPHS
 GRAPHS, GRAPH MODELS, GRAPH TERMINOLOGY, AND SPECIAL TYPES OF GRAPHS DR. ANDREW SCHWARTZ, PH.D. 10.1 Graphs and Graph Models (1) A graph G = (V, E) consists of V, a nonempty set of vertices (or nodes)
GRAPHS, GRAPH MODELS, GRAPH TERMINOLOGY, AND SPECIAL TYPES OF GRAPHS DR. ANDREW SCHWARTZ, PH.D. 10.1 Graphs and Graph Models (1) A graph G = (V, E) consists of V, a nonempty set of vertices (or nodes)
Chapter 23. Minimum Spanning Trees
 Chapter 23. Minimum Spanning Trees We are given a connected, weighted, undirected graph G = (V,E;w), where each edge (u,v) E has a non-negative weight (often called length) w(u,v). The Minimum Spanning
Chapter 23. Minimum Spanning Trees We are given a connected, weighted, undirected graph G = (V,E;w), where each edge (u,v) E has a non-negative weight (often called length) w(u,v). The Minimum Spanning
Graph. Vertex. edge. Directed Graph. Undirected Graph
 Module : Graphs Dr. Natarajan Meghanathan Professor of Computer Science Jackson State University Jackson, MS E-mail: natarajan.meghanathan@jsums.edu Graph Graph is a data structure that is a collection
Module : Graphs Dr. Natarajan Meghanathan Professor of Computer Science Jackson State University Jackson, MS E-mail: natarajan.meghanathan@jsums.edu Graph Graph is a data structure that is a collection
Part VI Graph algorithms. Chapter 22 Elementary Graph Algorithms Chapter 23 Minimum Spanning Trees Chapter 24 Single-source Shortest Paths
 Part VI Graph algorithms Chapter 22 Elementary Graph Algorithms Chapter 23 Minimum Spanning Trees Chapter 24 Single-source Shortest Paths 1 Chapter 22 Elementary Graph Algorithms Representations of graphs
Part VI Graph algorithms Chapter 22 Elementary Graph Algorithms Chapter 23 Minimum Spanning Trees Chapter 24 Single-source Shortest Paths 1 Chapter 22 Elementary Graph Algorithms Representations of graphs
Dist(Vertex u, Vertex v, Graph preprocessed) return u.dist v.dist
 return u.dist v.dist") Design and Analysis of Algorithms 5th September, 2016 Practice Sheet 3 Solutions Sushant Agarwal Solutions 1. Given an edge-weighted undirected connected chain-graph G = (V, E), all vertices having degree
Design and Analysis of Algorithms 5th September, 2016 Practice Sheet 3 Solutions Sushant Agarwal Solutions 1. Given an edge-weighted undirected connected chain-graph G = (V, E), all vertices having degree
Graphs. Pseudograph: multiple edges and loops allowed
 Graphs G = (V, E) V - set of vertices, E - set of edges Undirected graphs Simple graph: V - nonempty set of vertices, E - set of unordered pairs of distinct vertices (no multiple edges or loops) Multigraph:
Graphs G = (V, E) V - set of vertices, E - set of edges Undirected graphs Simple graph: V - nonempty set of vertices, E - set of unordered pairs of distinct vertices (no multiple edges or loops) Multigraph:
 UNIT IV -NON-LINEAR DATA STRUCTURES 4.1 Trees TREE: A tree is a finite set of one or more nodes such that there is a specially designated node called the Root, and zero or more non empty sub trees T1,
UNIT IV -NON-LINEAR DATA STRUCTURES 4.1 Trees TREE: A tree is a finite set of one or more nodes such that there is a specially designated node called the Root, and zero or more non empty sub trees T1,
Chapter 4. Greedy Algorithms. Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved.
 Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved. 1 4.5 Minimum Spanning Tree Minimum Spanning Tree Minimum spanning tree. Given a connected
Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved. 1 4.5 Minimum Spanning Tree Minimum Spanning Tree Minimum spanning tree. Given a connected
Discrete Mathematics for CS Spring 2008 David Wagner Note 13. An Introduction to Graphs
 CS 70 Discrete Mathematics for CS Spring 2008 David Wagner Note 13 An Introduction to Graphs Formulating a simple, precise specification of a computational problem is often a prerequisite to writing a
CS 70 Discrete Mathematics for CS Spring 2008 David Wagner Note 13 An Introduction to Graphs Formulating a simple, precise specification of a computational problem is often a prerequisite to writing a
Minimum spanning trees
 Minimum spanning trees [We re following the book very closely.] One of the most famous greedy algorithms (actually rather family of greedy algorithms). Given undirected graph G = (V, E), connected Weight
Minimum spanning trees [We re following the book very closely.] One of the most famous greedy algorithms (actually rather family of greedy algorithms). Given undirected graph G = (V, E), connected Weight
Advanced Algorithms Class Notes for Monday, October 23, 2012 Min Ye, Mingfu Shao, and Bernard Moret
 Advanced Algorithms Class Notes for Monday, October 23, 2012 Min Ye, Mingfu Shao, and Bernard Moret Greedy Algorithms (continued) The best known application where the greedy algorithm is optimal is surely
Advanced Algorithms Class Notes for Monday, October 23, 2012 Min Ye, Mingfu Shao, and Bernard Moret Greedy Algorithms (continued) The best known application where the greedy algorithm is optimal is surely
Fundamental Properties of Graphs
 Chapter three In many real-life situations we need to know how robust a graph that represents a certain network is, how edges or vertices can be removed without completely destroying the overall connectivity,
Chapter three In many real-life situations we need to know how robust a graph that represents a certain network is, how edges or vertices can be removed without completely destroying the overall connectivity,
CS 311 Discrete Math for Computer Science Dr. William C. Bulko. Graphs
 CS 311 Discrete Math for Computer Science Dr. William C. Bulko Graphs 2014 Definitions Definition: A graph G = (V,E) consists of a nonempty set V of vertices (or nodes) and a set E of edges. Each edge
CS 311 Discrete Math for Computer Science Dr. William C. Bulko Graphs 2014 Definitions Definition: A graph G = (V,E) consists of a nonempty set V of vertices (or nodes) and a set E of edges. Each edge
Computer Science & Engineering 423/823 Design and Analysis of Algorithms
 Computer Science & Engineering 423/823 Design and Analysis of Algorithms Lecture 05 Minimum-Weight Spanning Trees (Chapter 23) Stephen Scott (Adapted from Vinodchandran N. Variyam) sscott@cse.unl.edu Introduction
Computer Science & Engineering 423/823 Design and Analysis of Algorithms Lecture 05 Minimum-Weight Spanning Trees (Chapter 23) Stephen Scott (Adapted from Vinodchandran N. Variyam) sscott@cse.unl.edu Introduction
March 20/2003 Jayakanth Srinivasan,
 Definition : A simple graph G = (V, E) consists of V, a nonempty set of vertices, and E, a set of unordered pairs of distinct elements of V called edges. Definition : In a multigraph G = (V, E) two or
Definition : A simple graph G = (V, E) consists of V, a nonempty set of vertices, and E, a set of unordered pairs of distinct elements of V called edges. Definition : In a multigraph G = (V, E) two or
Minimum Spanning Trees
 Chapter 23 Minimum Spanning Trees Let G(V, E, ω) be a weighted connected graph. Find out another weighted connected graph T(V, E, ω), E E, such that T has the minimum weight among all such T s. An important
Chapter 23 Minimum Spanning Trees Let G(V, E, ω) be a weighted connected graph. Find out another weighted connected graph T(V, E, ω), E E, such that T has the minimum weight among all such T s. An important
Algorithm Design (8) Graph Algorithms 1/2
 Graph Algorithms 1/2") Graph Algorithm Design (8) Graph Algorithms / Graph:, : A finite set of vertices (or nodes) : A finite set of edges (or arcs or branches) each of which connect two vertices Takashi Chikayama School of
Graph Algorithm Design (8) Graph Algorithms / Graph:, : A finite set of vertices (or nodes) : A finite set of edges (or arcs or branches) each of which connect two vertices Takashi Chikayama School of
Data Structure. IBPS SO (IT- Officer) Exam 2017
 Exam 2017") Data Structure IBPS SO (IT- Officer) Exam 2017 Data Structure: In computer science, a data structure is a way of storing and organizing data in a computer s memory so that it can be used efficiently. Data
Data Structure IBPS SO (IT- Officer) Exam 2017 Data Structure: In computer science, a data structure is a way of storing and organizing data in a computer s memory so that it can be used efficiently. Data
CIS 121 Data Structures and Algorithms Minimum Spanning Trees
 CIS 121 Data Structures and Algorithms Minimum Spanning Trees March 19, 2019 Introduction and Background Consider a very natural problem: we are given a set of locations V = {v 1, v 2,..., v n }. We want
CIS 121 Data Structures and Algorithms Minimum Spanning Trees March 19, 2019 Introduction and Background Consider a very natural problem: we are given a set of locations V = {v 1, v 2,..., v n }. We want
Graph Theory CS/Math231 Discrete Mathematics Spring2015
 1 Graphs Definition 1 A directed graph (or digraph) G is a pair (V, E), where V is a finite set and E is a binary relation on V. The set V is called the vertex set of G, and its elements are called vertices
1 Graphs Definition 1 A directed graph (or digraph) G is a pair (V, E), where V is a finite set and E is a binary relation on V. The set V is called the vertex set of G, and its elements are called vertices
Undirected Graphs. DSA - lecture 6 - T.U.Cluj-Napoca - M. Joldos 1
 Undirected Graphs Terminology. Free Trees. Representations. Minimum Spanning Trees (algorithms: Prim, Kruskal). Graph Traversals (dfs, bfs). Articulation points & Biconnected Components. Graph Matching
Undirected Graphs Terminology. Free Trees. Representations. Minimum Spanning Trees (algorithms: Prim, Kruskal). Graph Traversals (dfs, bfs). Articulation points & Biconnected Components. Graph Matching
Lecture 2 - Graph Theory Fundamentals - Reachability and Exploration 1
 CME 305: Discrete Mathematics and Algorithms Instructor: Professor Aaron Sidford (sidford@stanford.edu) January 11, 2018 Lecture 2 - Graph Theory Fundamentals - Reachability and Exploration 1 In this lecture
CME 305: Discrete Mathematics and Algorithms Instructor: Professor Aaron Sidford (sidford@stanford.edu) January 11, 2018 Lecture 2 - Graph Theory Fundamentals - Reachability and Exploration 1 In this lecture
Discrete Mathematics and Probability Theory Fall 2009 Satish Rao,David Tse Note 8
 CS 70 Discrete Mathematics and Probability Theory Fall 2009 Satish Rao,David Tse Note 8 An Introduction to Graphs Formulating a simple, precise specification of a computational problem is often a prerequisite
CS 70 Discrete Mathematics and Probability Theory Fall 2009 Satish Rao,David Tse Note 8 An Introduction to Graphs Formulating a simple, precise specification of a computational problem is often a prerequisite
Graphs. The ultimate data structure. graphs 1
 Graphs The ultimate data structure graphs 1 Definition of graph Non-linear data structure consisting of nodes & links between them (like trees in this sense) Unlike trees, graph nodes may be completely
Graphs The ultimate data structure graphs 1 Definition of graph Non-linear data structure consisting of nodes & links between them (like trees in this sense) Unlike trees, graph nodes may be completely
Agenda. Graph Representation DFS BFS Dijkstra A* Search Bellman-Ford Floyd-Warshall Iterative? Non-iterative? MST Flow Edmond-Karp
 Graph Charles Lin genda Graph Representation FS BFS ijkstra * Search Bellman-Ford Floyd-Warshall Iterative? Non-iterative? MST Flow Edmond-Karp Graph Representation djacency Matrix bool way[100][100];
Graph Charles Lin genda Graph Representation FS BFS ijkstra * Search Bellman-Ford Floyd-Warshall Iterative? Non-iterative? MST Flow Edmond-Karp Graph Representation djacency Matrix bool way[100][100];
SCHOOL OF ENGINEERING & BUILT ENVIRONMENT. Mathematics. An Introduction to Graph Theory
 SCHOOL OF ENGINEERING & BUILT ENVIRONMENT Mathematics An Introduction to Graph Theory. Introduction. Definitions.. Vertices and Edges... The Handshaking Lemma.. Connected Graphs... Cut-Points and Bridges.
SCHOOL OF ENGINEERING & BUILT ENVIRONMENT Mathematics An Introduction to Graph Theory. Introduction. Definitions.. Vertices and Edges... The Handshaking Lemma.. Connected Graphs... Cut-Points and Bridges.
1 Minimum Spanning Trees (MST) b 2 3 a. 10 e h. j m
 b 2 3 a. 10 e h. j m") Minimum Spanning Trees (MST) 8 0 e 7 b 3 a 5 d 9 h i g c 8 7 6 3 f j 9 6 k l 5 m A graph H(U,F) is a subgraph of G(V,E) if U V and F E. A subgraph H(U,F) is called spanning if U = V. Let G be a graph with
Minimum Spanning Trees (MST) 8 0 e 7 b 3 a 5 d 9 h i g c 8 7 6 3 f j 9 6 k l 5 m A graph H(U,F) is a subgraph of G(V,E) if U V and F E. A subgraph H(U,F) is called spanning if U = V. Let G be a graph with
CS 341: Algorithms. Douglas R. Stinson. David R. Cheriton School of Computer Science University of Waterloo. February 26, 2019
 CS 341: Algorithms Douglas R. Stinson David R. Cheriton School of Computer Science University of Waterloo February 26, 2019 D.R. Stinson (SCS) CS 341 February 26, 2019 1 / 296 1 Course Information 2 Introduction
CS 341: Algorithms Douglas R. Stinson David R. Cheriton School of Computer Science University of Waterloo February 26, 2019 D.R. Stinson (SCS) CS 341 February 26, 2019 1 / 296 1 Course Information 2 Introduction
CS302 - Data Structures using C++
 CS302 - Data Structures using C++ Topic: Graphs - Introduction Kostas Alexis Terminology In the context of our course, graphs represent relations among data items G = {V,E} A graph is a set of vertices
CS302 - Data Structures using C++ Topic: Graphs - Introduction Kostas Alexis Terminology In the context of our course, graphs represent relations among data items G = {V,E} A graph is a set of vertices
Minimum Spanning Trees
 Minimum Spanning Trees 1 Minimum- Spanning Trees 1. Concrete example: computer connection. Definition of a Minimum- Spanning Tree Concrete example Imagine: You wish to connect all the computers in an office
Minimum Spanning Trees 1 Minimum- Spanning Trees 1. Concrete example: computer connection. Definition of a Minimum- Spanning Tree Concrete example Imagine: You wish to connect all the computers in an office
Basics of Graph Theory
 Basics of Graph Theory 1 Basic notions A simple graph G = (V, E) consists of V, a nonempty set of vertices, and E, a set of unordered pairs of distinct elements of V called edges. Simple graphs have their
Basics of Graph Theory 1 Basic notions A simple graph G = (V, E) consists of V, a nonempty set of vertices, and E, a set of unordered pairs of distinct elements of V called edges. Simple graphs have their
CS 310 Advanced Data Structures and Algorithms
 CS 0 Advanced Data Structures and Algorithms Weighted Graphs July 0, 07 Tong Wang UMass Boston CS 0 July 0, 07 / Weighted Graphs Each edge has a weight (cost) Edge-weighted graphs Mostly we consider only
CS 0 Advanced Data Structures and Algorithms Weighted Graphs July 0, 07 Tong Wang UMass Boston CS 0 July 0, 07 / Weighted Graphs Each edge has a weight (cost) Edge-weighted graphs Mostly we consider only
Outline. Introduction. Representations of Graphs Graph Traversals. Applications. Definitions and Basic Terminologies
 Graph Chapter 9 Outline Introduction Definitions and Basic Terminologies Representations of Graphs Graph Traversals Breadth first traversal Depth first traversal Applications Single source shortest path
Graph Chapter 9 Outline Introduction Definitions and Basic Terminologies Representations of Graphs Graph Traversals Breadth first traversal Depth first traversal Applications Single source shortest path
CSE 100: GRAPH ALGORITHMS
 CSE 100: GRAPH ALGORITHMS Dijkstra s Algorithm: Questions Initialize the graph: Give all vertices a dist of INFINITY, set all done flags to false Start at s; give s dist = 0 and set prev field to -1 Enqueue
CSE 100: GRAPH ALGORITHMS Dijkstra s Algorithm: Questions Initialize the graph: Give all vertices a dist of INFINITY, set all done flags to false Start at s; give s dist = 0 and set prev field to -1 Enqueue
Minimum Spanning Trees Ch 23 Traversing graphs
 Next: Graph Algorithms Graphs Ch 22 Graph representations adjacency list adjacency matrix Minimum Spanning Trees Ch 23 Traversing graphs Breadth-First Search Depth-First Search 11/30/17 CSE 3101 1 Graphs
Next: Graph Algorithms Graphs Ch 22 Graph representations adjacency list adjacency matrix Minimum Spanning Trees Ch 23 Traversing graphs Breadth-First Search Depth-First Search 11/30/17 CSE 3101 1 Graphs
Week 11: Minimum Spanning trees
 Week 11: Minimum Spanning trees Agenda: Minimum Spanning Trees Prim s Algorithm Reading: Textbook : 61-7 1 Week 11: Minimum Spanning trees Minimum spanning tree (MST) problem: Input: edge-weighted (simple,
Week 11: Minimum Spanning trees Agenda: Minimum Spanning Trees Prim s Algorithm Reading: Textbook : 61-7 1 Week 11: Minimum Spanning trees Minimum spanning tree (MST) problem: Input: edge-weighted (simple,
23.2 Minimum Spanning Trees
 23.2 Minimum Spanning Trees Kruskal s algorithm: Kruskal s algorithm solves the Minimum Spanning Tree problem in O( E log V ) time. It employs the disjoint-set data structure that is similarly used for
23.2 Minimum Spanning Trees Kruskal s algorithm: Kruskal s algorithm solves the Minimum Spanning Tree problem in O( E log V ) time. It employs the disjoint-set data structure that is similarly used for
 CS6301 Programming and Data Structures II Unit -5 REPRESENTATION OF GRAPHS Graph and its representations Graph is a data structure that consists of following two components: 1. A finite set of vertices
CS6301 Programming and Data Structures II Unit -5 REPRESENTATION OF GRAPHS Graph and its representations Graph is a data structure that consists of following two components: 1. A finite set of vertices
Foundations of Discrete Mathematics
 Foundations of Discrete Mathematics Chapter 12 By Dr. Dalia M. Gil, Ph.D. Trees Tree are useful in computer science, where they are employed in a wide range of algorithms. They are used to construct efficient
Foundations of Discrete Mathematics Chapter 12 By Dr. Dalia M. Gil, Ph.D. Trees Tree are useful in computer science, where they are employed in a wide range of algorithms. They are used to construct efficient
Let G = (V, E) be a graph. If u, v V, then u is adjacent to v if {u, v} E. We also use the notation u v to denote that u is adjacent to v.
 be a graph. If u, v V, then u is adjacent to v if {u, v} E. We also use the notation u v to denote that u is adjacent to v.") Graph Adjacent Endpoint of an edge Incident Neighbors of a vertex Degree of a vertex Theorem Graph relation Order of a graph Size of a graph Maximum and minimum degree Let G = (V, E) be a graph. If u,
Graph Adjacent Endpoint of an edge Incident Neighbors of a vertex Degree of a vertex Theorem Graph relation Order of a graph Size of a graph Maximum and minimum degree Let G = (V, E) be a graph. If u,
Math 776 Graph Theory Lecture Note 1 Basic concepts
 Math 776 Graph Theory Lecture Note 1 Basic concepts Lectured by Lincoln Lu Transcribed by Lincoln Lu Graph theory was founded by the great Swiss mathematician Leonhard Euler (1707-178) after he solved
Math 776 Graph Theory Lecture Note 1 Basic concepts Lectured by Lincoln Lu Transcribed by Lincoln Lu Graph theory was founded by the great Swiss mathematician Leonhard Euler (1707-178) after he solved
Algorithms. Graphs. Algorithms
 Algorithms Graphs Algorithms Graphs Definition: A graph is a collection of edges and vertices. Each edge connects two vertices. Algorithms 1 Graphs Vertices: Nodes, points, computers, users, items,...
Algorithms Graphs Algorithms Graphs Definition: A graph is a collection of edges and vertices. Each edge connects two vertices. Algorithms 1 Graphs Vertices: Nodes, points, computers, users, items,...
Simple graph Complete graph K 7. Non- connected graph
 A graph G consists of a pair (V; E), where V is the set of vertices and E the set of edges. We write V (G) for the vertices of G and E(G) for the edges of G. If no two edges have the same endpoints we
A graph G consists of a pair (V; E), where V is the set of vertices and E the set of edges. We write V (G) for the vertices of G and E(G) for the edges of G. If no two edges have the same endpoints we
Discrete Mathematics and Probability Theory Fall 2013 Vazirani Note 7
 CS 70 Discrete Mathematics and Probability Theory Fall 2013 Vazirani Note 7 An Introduction to Graphs A few centuries ago, residents of the city of Königsberg, Prussia were interested in a certain problem.
CS 70 Discrete Mathematics and Probability Theory Fall 2013 Vazirani Note 7 An Introduction to Graphs A few centuries ago, residents of the city of Königsberg, Prussia were interested in a certain problem.
Discrete mathematics II. - Graphs
 Emil Vatai April 25, 2018 Basic definitions Definition of an undirected graph Definition (Undirected graph) An undirected graph or (just) a graph is a triplet G = (ϕ, E, V ), where V is the set of vertices,
Emil Vatai April 25, 2018 Basic definitions Definition of an undirected graph Definition (Undirected graph) An undirected graph or (just) a graph is a triplet G = (ϕ, E, V ), where V is the set of vertices,
Algorithms: Graphs. Amotz Bar-Noy. Spring 2012 CUNY. Amotz Bar-Noy (CUNY) Graphs Spring / 95
 Graphs Spring / 95") Algorithms: Graphs Amotz Bar-Noy CUNY Spring 2012 Amotz Bar-Noy (CUNY) Graphs Spring 2012 1 / 95 Graphs Definition: A graph is a collection of edges and vertices. Each edge connects two vertices. Amotz
Algorithms: Graphs Amotz Bar-Noy CUNY Spring 2012 Amotz Bar-Noy (CUNY) Graphs Spring 2012 1 / 95 Graphs Definition: A graph is a collection of edges and vertices. Each edge connects two vertices. Amotz
7.1 Introduction. A (free) tree T is A simple graph such that for every pair of vertices v and w there is a unique path from v to w
 tree T is A simple graph such that for every pair of vertices v and w there is a unique path from v to w") Chapter 7 Trees 7.1 Introduction A (free) tree T is A simple graph such that for every pair of vertices v and w there is a unique path from v to w Tree Terminology Parent Ancestor Child Descendant Siblings
Chapter 7 Trees 7.1 Introduction A (free) tree T is A simple graph such that for every pair of vertices v and w there is a unique path from v to w Tree Terminology Parent Ancestor Child Descendant Siblings
Graph Algorithms Using Depth First Search
 Graph Algorithms Using Depth First Search Analysis of Algorithms Week 8, Lecture 1 Prepared by John Reif, Ph.D. Distinguished Professor of Computer Science Duke University Graph Algorithms Using Depth
Graph Algorithms Using Depth First Search Analysis of Algorithms Week 8, Lecture 1 Prepared by John Reif, Ph.D. Distinguished Professor of Computer Science Duke University Graph Algorithms Using Depth
We ve done. Introduction to the greedy method Activity selection problem How to prove that a greedy algorithm works Fractional Knapsack Huffman coding
 We ve done Introduction to the greedy method Activity selection problem How to prove that a greedy algorithm works Fractional Knapsack Huffman coding Matroid Theory Now Matroids and weighted matroids Generic
We ve done Introduction to the greedy method Activity selection problem How to prove that a greedy algorithm works Fractional Knapsack Huffman coding Matroid Theory Now Matroids and weighted matroids Generic
Lecture 13. Reading: Weiss, Ch. 9, Ch 8 CSE 100, UCSD: LEC 13. Page 1 of 29
 Lecture 13 Connectedness in graphs Spanning trees in graphs Finding a minimal spanning tree Time costs of graph problems and NP-completeness Finding a minimal spanning tree: Prim s and Kruskal s algorithms
Lecture 13 Connectedness in graphs Spanning trees in graphs Finding a minimal spanning tree Time costs of graph problems and NP-completeness Finding a minimal spanning tree: Prim s and Kruskal s algorithms
DS UNIT 4. Matoshri College of Engineering and Research Center Nasik Department of Computer Engineering Discrete Structutre UNIT - IV
 Sr.No. Question Option A Option B Option C Option D 1 2 3 4 5 6 Class : S.E.Comp Which one of the following is the example of non linear data structure Let A be an adjacency matrix of a graph G. The ij
Sr.No. Question Option A Option B Option C Option D 1 2 3 4 5 6 Class : S.E.Comp Which one of the following is the example of non linear data structure Let A be an adjacency matrix of a graph G. The ij
Introduction to Optimization
 Introduction to Optimization Greedy Algorithms October 28, 2016 École Centrale Paris, Châtenay-Malabry, France Dimo Brockhoff Inria Saclay Ile-de-France 2 Course Overview Date Fri, 7.10.2016 Fri, 28.10.2016
Introduction to Optimization Greedy Algorithms October 28, 2016 École Centrale Paris, Châtenay-Malabry, France Dimo Brockhoff Inria Saclay Ile-de-France 2 Course Overview Date Fri, 7.10.2016 Fri, 28.10.2016
Lecture 5: Graphs. Rajat Mittal. IIT Kanpur
 Lecture : Graphs Rajat Mittal IIT Kanpur Combinatorial graphs provide a natural way to model connections between different objects. They are very useful in depicting communication networks, social networks
Lecture : Graphs Rajat Mittal IIT Kanpur Combinatorial graphs provide a natural way to model connections between different objects. They are very useful in depicting communication networks, social networks
Brief History. Graph Theory. What is a graph? Types of graphs Directed graph: a graph that has edges with specific directions
 Brief History Graph Theory What is a graph? It all began in 1736 when Leonhard Euler gave a proof that not all seven bridges over the Pregolya River could all be walked over once and end up where you started.
Brief History Graph Theory What is a graph? It all began in 1736 when Leonhard Euler gave a proof that not all seven bridges over the Pregolya River could all be walked over once and end up where you started.