Structure from Motion
|
|
|
- Cuthbert Sanders
- 5 years ago
- Views:
Transcription

1 Structure from Motion Lecture-13 Moving Light Display 1
 and")
2 Shape from Motion Problem Given optical flow or point correspondences, compute 3-D motion (translation and rotation) and shape (depth). 2
3 S. Ullman Hanson & Riseman Webb & Aggarwal T. Huang Heeger and Jepson Chellappa Faugeras Zisserman Kanade Structure from Motion Pentland Van Gool Pollefeys Seitz & Szeliski Shahsua Irani Vidal & Yi Ma Medioni Fleet Tian & Shah - Photosynth 3
4 Tomasi and Kanade Factorization Orthographic Projection Assumptions The camera model is orthographic. The positions of p points in F frames (F>=3), which are not all coplanar, and have been tracked. The entire sequence has been acquired before starting (batch mode). Camera calibration not needed, if we accept 3D points up to a scale factor. 4
5 Feature Points Image points (This is not optical flow Mean Normalize Feature Points (A) 5
 Orthographic projection i, j, k are unit vectors along X, Y,")
6 Orthographic Projection Orthographic Projection 3D world point (C) Orthographic projection i, j, k are unit vectors along X, Y, Z 6
7 If Origin of world is at the centroid of object points 7
8 (B) 3XP 2FX3 Rank of S is 3, because points in 3D space are not Co-planar Rank Theorem Without noise, the registered measurement matrix is at most of rank three. Because W is a product of two matrices. The maximum rank of S is 3. 8
9 Translation From (A) From (B) From (C) (D) is projection of camera translation along x-axis Translation 2FXP 2FX3 3XP 2FX1 1XP 9
10 Translation Projected camera translation can be computed: From (D) Noisy Measurements Without noise, the matrix must be at most of rank 3. When noise corrupts the images, however, will not be rank 3. Rank theorem can be extended to the case of noisy measurements. 10
11 Approximate Rank SVD 2FXP 2FXP PXP PXP Singular Value Decomposition (SVD) Theorem: Any m by n matrix A, for which,can be written as is diagonal mxn mxn nxn nxn are orthogonal 11
12 Singular Value Decomposition (SVD) If A is square, then are all square. nxn nxn nxn nxn Approximate Rank 3 P-3 2F 3 P-3 3 P-3 3 P-3 P 12
13 Approximate Rank The best rank 3 approximation to the ideal registered measurement matrix. Rank Theorem for noisy measurement The best possible shape and rotation estimate is obtained by considering only 3 greatest singular values of together with the corresponding left, right eigenvectors. 13
14 Approximate Rank Approximate Rotation matrix Approximate Shape matrix This decomposition is not unique Q is any 3X3 invertable matrix Approximate Rank How to determine Q? R and S are linear transformation of approximate Rotation and shape matrices Rows of rotation matrix are unit vectors and orthogonal 14
15 How to determine Q: Newton s Method is error Compute SVD of define Compute Algorithm Compute 15
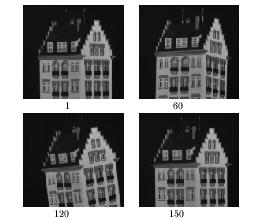
16 Results..\..\CAP6411\Fall2002\tomasiTr92Figures.pdf Hotel Sequence 16

17 Results (rotations) Selected Features 17

18 Reconstructed Shape Comparison 18

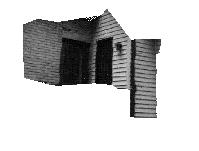

19 House Sequence Reconstructed Walls 19
20 Further Reading C. Tomasi and T. Kanade. Shape and motion from image streams under orthography---a factorization method. International Journal on Computer Vision, 9(2): , November Computer Vision: Algorithms and Applications, Richard Szeliski, Section
Structure from Motion. Lecture-15
 Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
CS231M Mobile Computer Vision Structure from motion
 CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Haowei Liu LECTURE 16 Structure from Motion from Tracked Points 16.1. Introduction In the last lecture we learned how to track point features
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Haowei Liu LECTURE 16 Structure from Motion from Tracked Points 16.1. Introduction In the last lecture we learned how to track point features
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
CS 664 Structure and Motion. Daniel Huttenlocher
 CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Introduction to Computer Vision Michael J. Black Nov 2009 Perspective projection and affine motion Goals Today Perspective projection 3D motion Wed Projects Friday Regularization and robust statistics
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15
 Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
Lecture 6 Stereo Systems Multi- view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-24-Jan-15 Lecture 6 Stereo Systems Multi- view geometry Stereo systems
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Last lecture. Passive Stereo Spacetime Stereo
 Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 4 Affine Structure from Motion Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 4 Affine Structure from Motion Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D, Newmark Civil Engineering
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
CS 231A Computer Vision (Winter 2015) Problem Set 2
 Problem Set 2") CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
CS 231A Computer Vision (Winter 2015) Problem Set 2 Due Feb 9 th 2015 11:59pm 1 Fundamental Matrix (20 points) In this question, you will explore some properties of fundamental matrix and derive a minimal
CS 231A: Computer Vision (Winter 2018) Problem Set 2
 Problem Set 2") CS 231A: Computer Vision (Winter 2018) Problem Set 2 Due Date: Feb 09 2018, 11:59pm Note: In this PS, using python2 is recommended, as the data files are dumped with python2. Using python3 might cause
CS 231A: Computer Vision (Winter 2018) Problem Set 2 Due Date: Feb 09 2018, 11:59pm Note: In this PS, using python2 is recommended, as the data files are dumped with python2. Using python3 might cause
Computer Vision: Lecture 3
 Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Computer Vision: Lecture 3 Carl Olsson 2019-01-29 Carl Olsson Computer Vision: Lecture 3 2019-01-29 1 / 28 Todays Lecture Camera Calibration The inner parameters - K. Projective vs. Euclidean Reconstruction.
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Lecture 3: Camera Calibration, DLT, SVD
 Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
The real voyage of discovery consists not in seeking new landscapes, but in having new eyes.
 The real voyage of discovery consists not in seeking new landscapes, but in having new eyes. - Marcel Proust University of Texas at Arlington Camera Calibration (or Resectioning) CSE 4392-5369 Vision-based
The real voyage of discovery consists not in seeking new landscapes, but in having new eyes. - Marcel Proust University of Texas at Arlington Camera Calibration (or Resectioning) CSE 4392-5369 Vision-based
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
A Factorization Method for Structure from Planar Motion
 A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
A Factorization Method for Structure from Planar Motion Jian Li and Rama Chellappa Center for Automation Research (CfAR) and Department of Electrical and Computer Engineering University of Maryland, College
Transformations Between Two Images. Translation Rotation Rigid Similarity (scaled rotation) Affine Projective Pseudo Perspective Bi linear
 Affine Projective Pseudo Perspective Bi linear") Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear Fundamental Matri Lecture 13 pplications Stereo Structure from Motion
Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear Fundamental Matri Lecture 13 pplications Stereo Structure from Motion
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
The end of affine cameras
 The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
The end of affine cameras Affine SFM revisited Epipolar geometry Two-view structure from motion Multi-view structure from motion Planches : http://www.di.ens.fr/~ponce/geomvis/lect3.pptx http://www.di.ens.fr/~ponce/geomvis/lect3.pdf
Fundamental Matrix. Lecture 13
 Fundamental Matri Lecture 13 Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear pplications Stereo Structure from Motion
Fundamental Matri Lecture 13 Transformations etween Two Images Translation Rotation Rigid Similarit (scaled rotation) ffine Projective Pseudo Perspective i linear pplications Stereo Structure from Motion
Reminder: Lecture 20: The Eight-Point Algorithm. Essential/Fundamental Matrix. E/F Matrix Summary. Computing F. Computing F from Point Matches
 Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
Reminder: Lecture 20: The Eight-Point Algorithm F = -0.00310695-0.0025646 2.96584-0.028094-0.00771621 56.3813 13.1905-29.2007-9999.79 Readings T&V 7.3 and 7.4 Essential/Fundamental Matrix E/F Matrix Summary
CS231A Course Notes 4: Stereo Systems and Structure from Motion
 CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
CS231A Course Notes 4: Stereo Systems and Structure from Motion Kenji Hata and Silvio Savarese 1 Introduction In the previous notes, we covered how adding additional viewpoints of a scene can greatly enhance
Passive 3D Photography
 SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
SIGGRAPH 99 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University http:// ://www.cs.cmu.edu/~seitz Talk Outline. Visual Cues 2. Classical Vision Algorithms 3. State of
Mysteries of Parameterizing Camera Motion - Part 1
 Mysteries of Parameterizing Camera Motion - Part 1 Instructor - Simon Lucey 16-623 - Advanced Computer Vision Apps Today Motivation SO(3) Convex? Exponential Maps SL(3) Group. Adapted from: Computer vision:
Mysteries of Parameterizing Camera Motion - Part 1 Instructor - Simon Lucey 16-623 - Advanced Computer Vision Apps Today Motivation SO(3) Convex? Exponential Maps SL(3) Group. Adapted from: Computer vision:
Contents. 1 Introduction Background Organization Features... 7
 Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
Contents 1 Introduction... 1 1.1 Background.... 1 1.2 Organization... 2 1.3 Features... 7 Part I Fundamental Algorithms for Computer Vision 2 Ellipse Fitting... 11 2.1 Representation of Ellipses.... 11
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Structure from Motion
 Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Structure from Motion Outline Bundle Adjustment Ambguities in Reconstruction Affine Factorization Extensions Structure from motion Recover both 3D scene geoemetry and camera positions SLAM: Simultaneous
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
N-View Methods. Diana Mateus, Nassir Navab. Computer Aided Medical Procedures Technische Universität München. 3D Computer Vision II
 1/66 N-View Methods Diana Mateus, Nassir Navab Computer Aided Medical Procedures Technische Universität München 3D Computer Vision II Inspired by Slides from Adrien Bartoli 2/66 Outline 1 Structure from
1/66 N-View Methods Diana Mateus, Nassir Navab Computer Aided Medical Procedures Technische Universität München 3D Computer Vision II Inspired by Slides from Adrien Bartoli 2/66 Outline 1 Structure from
NON-RIGID 3D SHAPE RECOVERY USING STEREO FACTORIZATION
 NON-IGID D SHAPE ECOVEY USING STEEO FACTOIZATION Alessio Del Bue ourdes Agapito Department of Computer Science Queen Mary, University of ondon ondon, E1 NS, UK falessio,lourdesg@dcsqmulacuk ABSTACT In
NON-IGID D SHAPE ECOVEY USING STEEO FACTOIZATION Alessio Del Bue ourdes Agapito Department of Computer Science Queen Mary, University of ondon ondon, E1 NS, UK falessio,lourdesg@dcsqmulacuk ABSTACT In
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Mei Han Takeo Kanade. January Carnegie Mellon University. Pittsburgh, PA Abstract
 Scene Reconstruction from Multiple Uncalibrated Views Mei Han Takeo Kanade January 000 CMU-RI-TR-00-09 The Robotics Institute Carnegie Mellon University Pittsburgh, PA 1513 Abstract We describe a factorization-based
Scene Reconstruction from Multiple Uncalibrated Views Mei Han Takeo Kanade January 000 CMU-RI-TR-00-09 The Robotics Institute Carnegie Mellon University Pittsburgh, PA 1513 Abstract We describe a factorization-based
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Announcements. Stereo
 Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Announcements Stereo Homework 2 is due today, 11:59 PM Homework 3 will be assigned today Reading: Chapter 7: Stereopsis CSE 152 Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where relative
Factorization with Missing and Noisy Data
 Factorization with Missing and Noisy Data Carme Julià, Angel Sappa, Felipe Lumbreras, Joan Serrat, and Antonio López Computer Vision Center and Computer Science Department, Universitat Autònoma de Barcelona,
Factorization with Missing and Noisy Data Carme Julià, Angel Sappa, Felipe Lumbreras, Joan Serrat, and Antonio López Computer Vision Center and Computer Science Department, Universitat Autònoma de Barcelona,
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Unit 3 Multiple View Geometry
 Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Unit 3 Multiple View Geometry Relations between images of a scene Recovering the cameras Recovering the scene structure http://www.robots.ox.ac.uk/~vgg/hzbook/hzbook1.html 3D structure from images Recover
Epipolar geometry. x x
 Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Two-view geometry Epipolar geometry X x x Baseline line connecting the two camera centers Epipolar Plane plane containing baseline (1D family) Epipoles = intersections of baseline with image planes = projections
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
CS 532: 3D Computer Vision 7 th Set of Notes
 1 CS 532: 3D Computer Vision 7 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Logistics No class on October
1 CS 532: 3D Computer Vision 7 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Logistics No class on October
Multiple Motion Scene Reconstruction from Uncalibrated Views
 Multiple Motion Scene Reconstruction from Uncalibrated Views Mei Han C & C Research Laboratories NEC USA, Inc. meihan@ccrl.sj.nec.com Takeo Kanade Robotics Institute Carnegie Mellon University tk@cs.cmu.edu
Multiple Motion Scene Reconstruction from Uncalibrated Views Mei Han C & C Research Laboratories NEC USA, Inc. meihan@ccrl.sj.nec.com Takeo Kanade Robotics Institute Carnegie Mellon University tk@cs.cmu.edu
Particle Tracking. For Bulk Material Handling Systems Using DEM Models. By: Jordan Pease
 Particle Tracking For Bulk Material Handling Systems Using DEM Models By: Jordan Pease Introduction Motivation for project Particle Tracking Application to DEM models Experimental Results Future Work References
Particle Tracking For Bulk Material Handling Systems Using DEM Models By: Jordan Pease Introduction Motivation for project Particle Tracking Application to DEM models Experimental Results Future Work References
March This research was sponsored by the Avionics Laboratory, Wright Research and Development
 Shape and Motion from Image Streams: a Factorization Method Full Report on the Orthographic Case Carlo Tomasi Takeo Kanade March 1992 Cornell TR 92-1270 and Carnegie Mellon CMU-CS-92-104 This research
Shape and Motion from Image Streams: a Factorization Method Full Report on the Orthographic Case Carlo Tomasi Takeo Kanade March 1992 Cornell TR 92-1270 and Carnegie Mellon CMU-CS-92-104 This research
3D RECONSTRUCTION FROM VIDEO SEQUENCES
 3D RECONSTRUCTION FROM VIDEO SEQUENCES 'CS365: Artificial Intelligence' Project Report Sahil Suneja Department of Computer Science and Engineering, Indian Institute of Technology, Kanpur
3D RECONSTRUCTION FROM VIDEO SEQUENCES 'CS365: Artificial Intelligence' Project Report Sahil Suneja Department of Computer Science and Engineering, Indian Institute of Technology, Kanpur
Announcements. Stereo
 Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Announcements Stereo Homework 1 is due today, 11:59 PM Homework 2 will be assigned on Thursday Reading: Chapter 7: Stereopsis CSE 252A Lecture 8 Binocular Stereopsis: Mars Given two images of a scene where
Introduction to Computer Vision. Week 10, Winter 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
Introduction to Computer Vision Week 10, Winter 2010 Instructor: Prof. Ko Nishino Today How do we recover geometry from 2 views? Stereo Can we recover geometry from a sequence of images Structure-from-Motion
Shape and Motion from Image Streams under Orthography: a Factorization Method
 International Journal of Computer Vision, 9:2, 137-154 (1992) 1992 Kluwer Academic Publishers, Manufactured in The Netherlands. Shape and Motion from Image Streams under Orthography: a Factorization Method
International Journal of Computer Vision, 9:2, 137-154 (1992) 1992 Kluwer Academic Publishers, Manufactured in The Netherlands. Shape and Motion from Image Streams under Orthography: a Factorization Method
Toward a Stratification of Helmholtz Stereopsis
 Toward a Stratification of Helmholtz Stereopsis Todd E Zickler Electrical Engineering Yale University New Haven CT 652 zickler@yaleedu Peter N Belhumeur Computer Science Columbia University New York NY
Toward a Stratification of Helmholtz Stereopsis Todd E Zickler Electrical Engineering Yale University New Haven CT 652 zickler@yaleedu Peter N Belhumeur Computer Science Columbia University New York NY
Shape and motion from image streams : a factorization method.
 Carnegie Mellon University Research Showcase @ CMU Computer Science Department School of Computer Science 1991 Shape and motion from image streams : a factorization method. Carlo Tomasi Carnegie Mellon
Carnegie Mellon University Research Showcase @ CMU Computer Science Department School of Computer Science 1991 Shape and motion from image streams : a factorization method. Carlo Tomasi Carnegie Mellon
Perception and Action using Multilinear Forms
 Perception and Action using Multilinear Forms Anders Heyden, Gunnar Sparr, Kalle Åström Dept of Mathematics, Lund University Box 118, S-221 00 Lund, Sweden email: {heyden,gunnar,kalle}@maths.lth.se Abstract
Perception and Action using Multilinear Forms Anders Heyden, Gunnar Sparr, Kalle Åström Dept of Mathematics, Lund University Box 118, S-221 00 Lund, Sweden email: {heyden,gunnar,kalle}@maths.lth.se Abstract
Two-View Geometry (Course 23, Lecture D)
") Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Two-View Geometry (Course 23, Lecture D) Jana Kosecka Department of Computer Science George Mason University http://www.cs.gmu.edu/~kosecka General Formulation Given two views of the scene recover the
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Linear Multi View Reconstruction and Camera Recovery Using a Reference Plane
 International Journal of Computer Vision 49(2/3), 117 141, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Linear Multi View Reconstruction and Camera Recovery Using a Reference
International Journal of Computer Vision 49(2/3), 117 141, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Linear Multi View Reconstruction and Camera Recovery Using a Reference
International Journal for Research in Applied Science & Engineering Technology (IJRASET) A Review: 3D Image Reconstruction From Multiple Images
 A Review: 3D Image Reconstruction From Multiple Images") A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
Announcements. Photometric Stereo. Shading reveals 3-D surface geometry. Photometric Stereo Rigs: One viewpoint, changing lighting
 Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Creating 3D Models with Uncalibrated Cameras
 Creating D Models with Uncalibrated Cameras Mei Han Takeo Kanade Robotics Institute, Carnegie Mellon University meihan,tk@cs.cmu.edu Abstract We describe a factorization-based method to recover D models
Creating D Models with Uncalibrated Cameras Mei Han Takeo Kanade Robotics Institute, Carnegie Mellon University meihan,tk@cs.cmu.edu Abstract We describe a factorization-based method to recover D models
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Structure from Motion
 Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
Lecture 5 Epipolar Geometry
 Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-24-Jan-18 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-24-Jan-18 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 253
 Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Index 3D reconstruction, 123 5+1-point algorithm, 274 5-point algorithm, 260 7-point algorithm, 255 8-point algorithm, 253 affine point, 43 affine transformation, 55 affine transformation group, 55 affine
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Structure Computation Lecture 18 March 22, 2005 2 3D Reconstruction The goal of 3D reconstruction
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Metric Structure from Motion
 CS443 Final Project Metric Structure from Motion Peng Cheng 1 Objective of the Project Given: 1. A static object with n feature points and unknown shape. 2. A camera with unknown intrinsic parameters takes
CS443 Final Project Metric Structure from Motion Peng Cheng 1 Objective of the Project Given: 1. A static object with n feature points and unknown shape. 2. A camera with unknown intrinsic parameters takes
A 3D shape constraint on video
 1 A 3D shape constraint on video Hui Ji and Cornelia Fermüller Member, IEEE, Center for Automation Research University of Maryland College Park, MD 20742-3275, USA {jihui, fer}@cfar.umd.edu Abstract We
1 A 3D shape constraint on video Hui Ji and Cornelia Fermüller Member, IEEE, Center for Automation Research University of Maryland College Park, MD 20742-3275, USA {jihui, fer}@cfar.umd.edu Abstract We
Camera Calibration from the Quasi-affine Invariance of Two Parallel Circles
 Camera Calibration from the Quasi-affine Invariance of Two Parallel Circles Yihong Wu, Haijiang Zhu, Zhanyi Hu, and Fuchao Wu National Laboratory of Pattern Recognition, Institute of Automation, Chinese
Camera Calibration from the Quasi-affine Invariance of Two Parallel Circles Yihong Wu, Haijiang Zhu, Zhanyi Hu, and Fuchao Wu National Laboratory of Pattern Recognition, Institute of Automation, Chinese
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Index. 3D reconstruction, point algorithm, point algorithm, point algorithm, point algorithm, 263
 Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Index 3D reconstruction, 125 5+1-point algorithm, 284 5-point algorithm, 270 7-point algorithm, 265 8-point algorithm, 263 affine point, 45 affine transformation, 57 affine transformation group, 57 affine
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Computer Perceptual Vision and Sensory WS 16/76 Augmented Computing Many slides adapted from K. Grauman, S. Seitz, R. Szeliski, M. Pollefeys, S. Lazebnik Computer Vision Lecture 20 Motion and Optical Flow
Today s lecture. Structure from Motion. Today s lecture. Parameterizing rotations
 Today s lecture Structure from Motion Computer Vision CSE576, Spring 2008 Richard Szeliski Geometric camera calibration camera matrix (Direct Linear Transform) non-linear least squares separating intrinsics
Today s lecture Structure from Motion Computer Vision CSE576, Spring 2008 Richard Szeliski Geometric camera calibration camera matrix (Direct Linear Transform) non-linear least squares separating intrinsics
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Recursive Estimation of Motion and Planar Structure
 BU CS TR99-6, Dec., 999 (revised Mar., ). To appear in Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR ). Recursive Estimation of Motion and Planar Structure Jonathan Alon and Stan Sclaroff
BU CS TR99-6, Dec., 999 (revised Mar., ). To appear in Proc. IEEE Conf. on Computer Vision and Pattern Recognition (CVPR ). Recursive Estimation of Motion and Planar Structure Jonathan Alon and Stan Sclaroff
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Computer Vision Lecture 20
 Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing Computer Perceptual Vision and Sensory WS 16/17 Augmented Computing
Multi-Frame Correspondence Estimation Using Subspace Constraints
 International Journal of Computer ision 483), 173 194, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Multi-Frame Correspondence Estimation Using Subspace Constraints MICHAL IRANI
International Journal of Computer ision 483), 173 194, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Multi-Frame Correspondence Estimation Using Subspace Constraints MICHAL IRANI
3D Model Acquisition by Tracking 2D Wireframes
 3D Model Acquisition by Tracking 2D Wireframes M. Brown, T. Drummond and R. Cipolla {96mab twd20 cipolla}@eng.cam.ac.uk Department of Engineering University of Cambridge Cambridge CB2 1PZ, UK Abstract
3D Model Acquisition by Tracking 2D Wireframes M. Brown, T. Drummond and R. Cipolla {96mab twd20 cipolla}@eng.cam.ac.uk Department of Engineering University of Cambridge Cambridge CB2 1PZ, UK Abstract
Textureless Layers CMU-RI-TR Qifa Ke, Simon Baker, and Takeo Kanade
 Textureless Layers CMU-RI-TR-04-17 Qifa Ke, Simon Baker, and Takeo Kanade The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract Layers are one of the most well
Textureless Layers CMU-RI-TR-04-17 Qifa Ke, Simon Baker, and Takeo Kanade The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue Pittsburgh, PA 15213 Abstract Layers are one of the most well
Uncalibrated Perspective Reconstruction of Deformable Structures
 Uncalibrated Perspective Reconstruction of Deformable Structures Jing Xiao Epson Palo Alto Laboratory Palo Alto, CA 94304 xiaoj@erdepsoncom Takeo Kanade Robotics Institute, CMU Pittsburgh, PA 523 tk@cscmuedu
Uncalibrated Perspective Reconstruction of Deformable Structures Jing Xiao Epson Palo Alto Laboratory Palo Alto, CA 94304 xiaoj@erdepsoncom Takeo Kanade Robotics Institute, CMU Pittsburgh, PA 523 tk@cscmuedu
Linear Multi-View Reconstruction of Points, Lines, Planes and Cameras using a Reference Plane
 Linear Multi-View Reconstruction of Points, Lines, Planes and Cameras using a Reference Plane Carsten Rother Computational Vision and Active Perception Laboratory (CVAP) Royal Institute of Technology (KTH),
Linear Multi-View Reconstruction of Points, Lines, Planes and Cameras using a Reference Plane Carsten Rother Computational Vision and Active Perception Laboratory (CVAP) Royal Institute of Technology (KTH),
EECS 442: Final Project
 EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
EECS 442: Final Project Structure From Motion Kevin Choi Robotics Ismail El Houcheimi Robotics Yih-Jye Jeffrey Hsu Robotics Abstract In this paper, we summarize the method, and results of our projective
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem