Locally Adaptive Regression Kernels with (many) Applications
|
|
|
- Job Owens
- 5 years ago
- Views:
Transcription







1 Locally Adaptive Regression Kernels with (many) Applications Peyman Milanfar EE Department University of California, Santa Cruz Joint work with Hiro Takeda, Hae Jong Seo, Xiang Zhu

2 Outline Introduction/Motivation Locally Adaptive Regression Kernels Applications Adaptive Kernel Regression


3 Pixels A Modern Paradigm: Measuring Patches Similarity Between Images




4 At the everyday scale.. Similarity between images H.J. Seo and P. Milanfar, Training free, Generic Object Detection using Locally Adaptive Regression Kernels, Accepted for publication in IEEE Trans. on Pattern Analysis and Machine Intelligence H.J. Seo and P. Milanfar, Action Recognition from One Example, Submitted to IEEE Trans. on Pattern Analysis and Machine Intelligence
5 Defining a point wise measure To measure the similarity of two pixels, consider Spatialdistance Gray level distance y Gray-level Δ Spatial Δ x
6 Euclidean measures Natural ways to incorporate the two Δs: BilateralKernel [Tomasi, Manduchi, 98] (pointwise) Non Local Means Kernel [Buades, et al. 05] (patchwise) y Euclidean distance Gray-level Δ Spatial Δ x

![98] Pixels Pixel](/docs-images/89/99074413/images/7-6.jpg "similarity Spatial")
7 Bilateral Kernel (BL) [Tomasi et al. 98] Pixels Pixel similarity Spatial similarity =

8 Non local Means (NLM) [Buades et al. 05] Patches Patchsimilarity Spatial similarity = Smoothing effect
9 Defining a better measure More effective ways to combine the two Δs: LARKKernel [Takeda, et al. 07] BeltramiKernel [Sochen, et al. 98] y Signal-induced distance Riemannian Metric Gray-level Δ Spatial Δ x
10 A digression to Non parametric Kernel Regression The data fitting problem Zero-mean, i.i.d noise (No other assump.) Given samples The sampling position The regression function The number of samples The particular form of may remain unspecified for now.
11 The data model Locality in Kernel Regression Local representation (N term Taylor expansion) Unknowns Note With a polynomial basis, we only need to estimate the first unknown, Other localized representations are also possible, and may be advantageous.



12 Optimization Problem We have a local representation with respect to each sample: Optimization N+1 terms The regression order This term give the estimated pixel value z(x). The choice of the kernel function is open, e.g. Gaussian.


13 To summarize Classic Kernel: Locally Linear Filter: Uses distance x-x i Data Adaptive Kernel: Locally Non Linear Filter: Uses x-x i and y-y i
14 Recall More effective ways to combine the two Δs: LARKKernel [Takeda, et al. 07] BeltramiKernel [Sochen, et al. 98] y Signal-induced distance Riemannian Metric Gray-level Δ Spatial Δ x








15 LARK Kernels Compute









16 LARK Kernels Gradient vector field Local covariance matrices Locally Adaptive Regression Kernel: LARK Structure tensor


17 Gradient matrix over a local patch: Gradient Covariance Matrix and Local Geometry C l G T G Capturing locally dominant orientations



18 Image as a Surface Embedded in the Euclidean 3 space Arclength on the surface Chain rule Regularization term Riemannian metric

19 (Dense) LARK Kernels as Visual Descriptors Measure the similarity of pixels using the metric implied by the local structure of the image H. J. Seo, and P. Milanfar, "Training free, Generic Object Detection using Locally Adaptive Regression Kernels", Accepted in Trans. on Pattern Analysis and Machine Intelligence

20 Robustness of LARK Descriptors Original Brightness Contrast WGN image change change sigma =


21 A Variant Better suited for Restoration = LARK Measures edginess LSK [*] [*] H. Takeda, S. Farsiu, P. Milanfar, Kernel Regression for Image Processing and Reconstruction, IEEE Transactions on Image Processing, Vol. 16, No. 2, pp , February 2007
22 Some 2 and 3 D Signal Processing Applications Denoising Interpolation Super resolution Deblurring
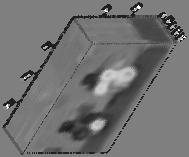
23 Film Grain Reduction (Real Noise) Noisy image

24 Film Grain Reduction (Real Noise) LARK
25 Film Grain Reduction (Real Noise) LARK KSVD BM3D


26 Adaptive Sharpening/Denoising Sharpeningthe LARK Kernel Sharpness parameter Laplacian operator
27 Automatically setting the local sharpness Local Measure of Sharpness: X. Zhu and P. Milanfar, Automatic Parameter Selection for Denoising Algorithms Using a No Reference Measure of Image Content, to appear in IEEE Trans. Image Processing




28 LARK based Simultaneous Sharpening/Deblurring/Denoising Net effect: aggressive denoising in flat areas Selective denoising and sharpening in edgy areas LARK based filter Locally adaptive denoise/deblur filters

29 Examples original image original image proposed method State of the art Methods
30 Examples
31 Experimental Results 2 Proposed Method

32 Application to All Focus Imaging Most imaging systems have limited depth of field How to get around this? Make aperture smaller Acquire multiple images, varying the focal length (focus stacking)
33 Application to All Focus Imaging How to merge these images together? 12 frames

34 Fusing images using the local sharpness measure The combines image will have the best part of each of the frames as given by The local measure of sharpness given by the eigenvalues of: Input sequence Motion Compensation Sharp Region Detection Locally Adaptive Image Fusion All focus Output

35 Input sequence Focus Stacking Examples
36 Output Focus Stacking Examples

37 Focus Stacking Examples Output (Photoshop CS4)
 Input images (37")

38 More Focus Stacking Examples Output (Helicon Focus) Input images (37 frames) Output (Ours) From:
")
39 Focus stacking Example Input images (24 frames) Output


40 Space Time Descriptors Setup is similar to 2 D, but.. Samples from nearby frames Covariance matrix is now 3x3 Contains implicit motion information Space time processing 1 1 Spatial gradients Temporal gradients
 x3 in space, x2 in time Upscaled video (432 x 528, 24")
41 Super resolution without Motion Estimation Adaptive Kernel Regression (3D) Original (QCIF, 144 x 176, 12 frames) x3 in space, x2 in time Upscaled video (432 x 528, 24 frames)
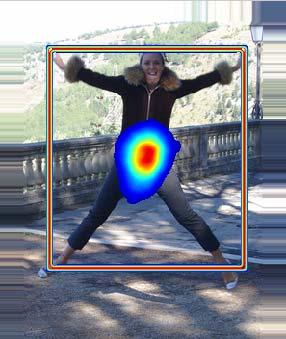
42 Computer Vision Applications: Object (2 D) and Action (3 D) Detection and Recognition.. from one example
43 Take a look at this:

44 See it here?

45 How about here?

46 Or here?
 people can find the Dragon Fruit from one look Even")
47 Single Example, No Training! (Most) people can find the Dragon Fruit from one look Even if they ve never seen it before.
48 Holy Grail of Computer Vision: Visual Seach Visual Search : Robustly detect objects/actions of interest within images/videos from a single query query target image query target video 1) Whether objects (actions) are present or not, 2) How many objects (actions)? 3) Where are they located?

49 Summary: Object Detection with Local Regression Kernels LARK LSK Query Target Descriptors NLM BL SSIM Compare Visual Features Target with bounding box SIFT HOG


")
")


![0 [*] H. J. Seo, and P.](/docs-images/89/99074413/images/50-7.jpg "Milanfar, \"Training free,")

50 Object Detection System Overview Query stage 1 stage 2 PCA Target Dense LARK Descriptors compute feature images 2) Significance Tests 3) Non-maxima Suppression Final result stage 3 1) Resemblance Map (RM) using Matrix Cosine Similarity [*] H. J. Seo, and P. Milanfar, "Training free, Generic Object Detection using Locally Adaptive Regression Kernels", To appear in TPAMI 2010






51 Stage 2: Feature Extraction from Descriptors Densely collected Vectorization Descriptors Apply PCA to for dimensionality reduction Retain the d largest principal components Project and onto Energy d Eigenvalue rank
52 System Overview : Stage 3 Query stage 1 stage 2 PCA Target Compute local steering kernels compute feature images stage 3 2) Significance Tests 3) Non-maxima Suppression Final result 1) Resemblance Map (RM) using Matrix Cosine Similarity
53 Stage 3: Finding similarity between features Target image is scanned into overlapping patches Query Target Query Target
54 Non standard correlation based Metric The vector cosine similarity Query Target patch Inner product between two normalized vectors Measures angle while discarding the magnitude



55 Stage 3: Matrix Cosine Similarity What about a set of vectors? Matrix Cosine Similarity Frobenius Inner product between normalized matrices Query Target patch A weighted sum of the column wise vector cosine similarities We can prove optimality of this approach in a naïve Bayes sense.
, \"Controlling the false discovery rate: a practical and powerful approach to multiple testing\".")
56 Thresholding: : Control False Discovery Rate 0.4 Empirical PDF % confidence level Significance level Y. Benjamini, Y. Hochberg (1995), "Controlling the false discovery rate: a practical and powerful approach to multiple testing". Journal of the Royal Statistical Society, Series B, 57 (1):





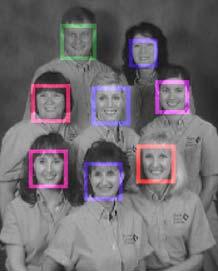

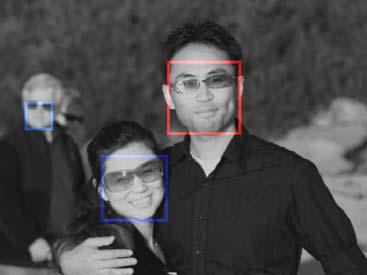

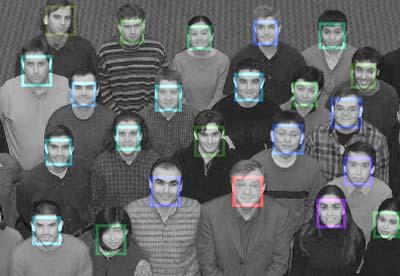



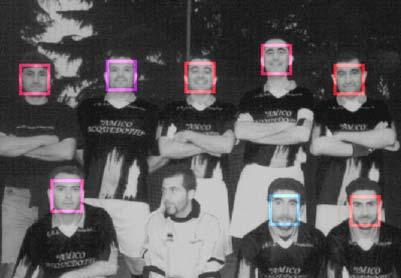




57 Some sample results: Query





58 Some Examples Query query Target target







59 Experimental Results query Target Target Target



60 Some Examples query target target




61 Some Examples Hand-drawn Query Targets
62 Quantitative comparison Recall LARK LSK SSIM NLM BL SIFT HOG Precision Recall = TP/nP Precision = TP/(TP+FP) TP: true positives FP: false positives np: a total number of positives (Weizmann general object database)











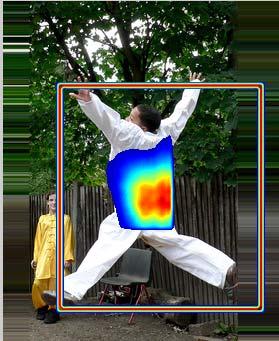
63 Action Detection/Recognition System Query stage 1 stage 2 PCA Target Compute space-time local steering kernels compute feature volumes No Motion Estimation No Segmentation No Learning No Prior Information 2) Significance Tests 3) Non-maxima Suppression Final result stage 3 1) Resemblance Map (RM) using Matrix Cosine Similarity H. Seo and P. Milanfar, Action Recognition from One Example, Submitted to Trans. on Pattern Analysis and Machine Intelligence

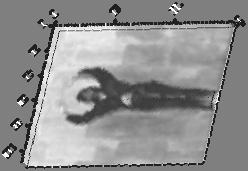
64 Action Detection Example Query No Motion Estimation No Segmentation No Learning No Prior Information


65 Experimental Results (Multiple Actions)


















66 Action Recognition Automatic cropping of a short action clip (25 frames) Action Category 1 5 Query Action Detection 2 6 Scoring Rank least similar most similar
67 Action Classification Performance Average confusion matrices Classification rate: 96 % Classification rate: % Bend Jack Jump Pjump Run Side Skip Walk Wave1 Wave Bend Jack Jump Pjump Run Side Skip Wave1 Walk box hclp hwav jog run walk box hclp hwav jog run walk (Weizmann dataset) Wave2 (KTH dataset) 90 video sequences 600 video sequences
68 Conclusions & Future Work LARK Kernels are very effective descriptors The approach is simple. Performance competitive or exceeding state of the art in Denoising/Deblurring/Super resolution (without explicit priors) Image and Video Detection/Recognition (without training)
Locally Adaptive Regression Kernels with (many) Applications
 Applications") Locally Adaptive Regression Kernels with (many) Applications Peyman Milanfar EE Department University of California, Santa Cruz Joint work with Hiro Takeda, Hae Jong Seo, Xiang Zhu Outline Introduction/Motivation
Locally Adaptive Regression Kernels with (many) Applications Peyman Milanfar EE Department University of California, Santa Cruz Joint work with Hiro Takeda, Hae Jong Seo, Xiang Zhu Outline Introduction/Motivation
Object and Action Detection from a Single Example
 Object and Action Detection from a Single Example Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Hae Jong Seo AFOSR Program Review, June 4-5, 29 Take a look at this:
Object and Action Detection from a Single Example Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Hae Jong Seo AFOSR Program Review, June 4-5, 29 Take a look at this:
Adaptive Kernel Regression for Image Processing and Reconstruction
 Adaptive Kernel Regression for Image Processing and Reconstruction Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Sina Farsiu, Hiro Takeda AFOSR Sensing Program Review,
Adaptive Kernel Regression for Image Processing and Reconstruction Peyman Milanfar* EE Department University of California, Santa Cruz *Joint work with Sina Farsiu, Hiro Takeda AFOSR Sensing Program Review,
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels
 Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
BEING able to automatically detect people in videos is
 1 Using Local Steering Kernels to Detect People in Videos Arthur Louis Alaniz II, Christina Marianne G. Mantaring Department of Electrical Engineering, Stanford University {aalaniz, cmgmant} @stanford.edu
1 Using Local Steering Kernels to Detect People in Videos Arthur Louis Alaniz II, Christina Marianne G. Mantaring Department of Electrical Engineering, Stanford University {aalaniz, cmgmant} @stanford.edu
Generic Human Action Recognition from a Single Example
 Noname manuscript No. (will be inserted by the editor) Generic Human Action Recognition from a Single Example Hae Jong Seo Peyman Milanfar Received: date / Accepted: date Abstract We present a novel human
Noname manuscript No. (will be inserted by the editor) Generic Human Action Recognition from a Single Example Hae Jong Seo Peyman Milanfar Received: date / Accepted: date Abstract We present a novel human
Action Recognition & Categories via Spatial-Temporal Features
 Action Recognition & Categories via Spatial-Temporal Features 华俊豪, 11331007 huajh7@gmail.com 2014/4/9 Talk at Image & Video Analysis taught by Huimin Yu. Outline Introduction Frameworks Feature extraction
Action Recognition & Categories via Spatial-Temporal Features 华俊豪, 11331007 huajh7@gmail.com 2014/4/9 Talk at Image & Video Analysis taught by Huimin Yu. Outline Introduction Frameworks Feature extraction
Action Recognition from One Example
 Action Recognition from One Example 1 Hae Jong Seo, Student Member, IEEE, and Peyman Milanfar, Senior Member, IEEE Abstract We present a novel action recognition method based on space-time locally adaptive
Action Recognition from One Example 1 Hae Jong Seo, Student Member, IEEE, and Peyman Milanfar, Senior Member, IEEE Abstract We present a novel action recognition method based on space-time locally adaptive
Kernel Regression Based Image Processing Toolbox for MATLAB
 April 14 th, 2008 Kernel Regression Based Image Processing Toolbox for MATLAB Version 1.2β Hiroyuki Takeda Multi-Dimensional Signal Processing Laboratory University of California, Santa Cruz 1 Directory
April 14 th, 2008 Kernel Regression Based Image Processing Toolbox for MATLAB Version 1.2β Hiroyuki Takeda Multi-Dimensional Signal Processing Laboratory University of California, Santa Cruz 1 Directory
Removing Atmospheric Turbulence
 Removing Atmospheric Turbulence Xiang Zhu, Peyman Milanfar EE Department University of California, Santa Cruz SIAM Imaging Science, May 20 th, 2012 1 What is the Problem? time 2 Atmospheric Turbulence
Removing Atmospheric Turbulence Xiang Zhu, Peyman Milanfar EE Department University of California, Santa Cruz SIAM Imaging Science, May 20 th, 2012 1 What is the Problem? time 2 Atmospheric Turbulence
Image Denoising using Locally Learned Dictionaries
 Image Denoising using Locally Learned Dictionaries Priyam Chatterjee and Peyman Milanfar Department of Electrical Engineering, University of California, Santa Cruz, CA 95064, USA. ABSTRACT In this paper
Image Denoising using Locally Learned Dictionaries Priyam Chatterjee and Peyman Milanfar Department of Electrical Engineering, University of California, Santa Cruz, CA 95064, USA. ABSTRACT In this paper
Regularized Kernel Regression for Image Deblurring
 Regularized Kernel Regression for Image Deblurring Hiroyuki Takeda, Sina Farsiu, and Peyman Milanfar Department of Electrical Engineering, niversity of California at Santa Cruz {htakeda,farsiu,milanfar}@soeucscedu
Regularized Kernel Regression for Image Deblurring Hiroyuki Takeda, Sina Farsiu, and Peyman Milanfar Department of Electrical Engineering, niversity of California at Santa Cruz {htakeda,farsiu,milanfar}@soeucscedu
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Evaluation of Local Space-time Descriptors based on Cuboid Detector in Human Action Recognition
 International Journal of Innovation and Applied Studies ISSN 2028-9324 Vol. 9 No. 4 Dec. 2014, pp. 1708-1717 2014 Innovative Space of Scientific Research Journals http://www.ijias.issr-journals.org/ Evaluation
International Journal of Innovation and Applied Studies ISSN 2028-9324 Vol. 9 No. 4 Dec. 2014, pp. 1708-1717 2014 Innovative Space of Scientific Research Journals http://www.ijias.issr-journals.org/ Evaluation
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Improved Non-Local Means Algorithm Based on Dimensionality Reduction
 Improved Non-Local Means Algorithm Based on Dimensionality Reduction Golam M. Maruf and Mahmoud R. El-Sakka (&) Department of Computer Science, University of Western Ontario, London, Ontario, Canada {gmaruf,melsakka}@uwo.ca
Improved Non-Local Means Algorithm Based on Dimensionality Reduction Golam M. Maruf and Mahmoud R. El-Sakka (&) Department of Computer Science, University of Western Ontario, London, Ontario, Canada {gmaruf,melsakka}@uwo.ca
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Human detection using histogram of oriented gradients. Srikumar Ramalingam School of Computing University of Utah
 Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
Human detection using histogram of oriented gradients Srikumar Ramalingam School of Computing University of Utah Reference Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection,
A NEW CLASS OF IMAGE FILTERS WITHOUT NORMALIZATION. Peyman Milanfar and Hossein Talebi. Google Research {milanfar,
 A NEW CLASS OF IMAGE FILTERS WITHOUT NORMALIZATION Peyman Milanfar and Hossein Talebi Google Research Email : {milanfar, htalebi}@google.com ABSTRACT When applying a filter to an image, it often makes
A NEW CLASS OF IMAGE FILTERS WITHOUT NORMALIZATION Peyman Milanfar and Hossein Talebi Google Research Email : {milanfar, htalebi}@google.com ABSTRACT When applying a filter to an image, it often makes
Optimal Denoising of Natural Images and their Multiscale Geometry and Density
 Optimal Denoising of Natural Images and their Multiscale Geometry and Density Department of Computer Science and Applied Mathematics Weizmann Institute of Science, Israel. Joint work with Anat Levin (WIS),
Optimal Denoising of Natural Images and their Multiscale Geometry and Density Department of Computer Science and Applied Mathematics Weizmann Institute of Science, Israel. Joint work with Anat Levin (WIS),
COSC160: Detection and Classification. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
COSC160: Detection and Classification Jeremy Bolton, PhD Assistant Teaching Professor Outline I. Problem I. Strategies II. Features for training III. Using spatial information? IV. Reducing dimensionality
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS
 IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS P.Mahalakshmi 1, J.Muthulakshmi 2, S.Kannadhasan 3 1,2 U.G Student, 3 Assistant Professor, Department of Electronics
IMAGE DENOISING TO ESTIMATE THE GRADIENT HISTOGRAM PRESERVATION USING VARIOUS ALGORITHMS P.Mahalakshmi 1, J.Muthulakshmi 2, S.Kannadhasan 3 1,2 U.G Student, 3 Assistant Professor, Department of Electronics
Computational Photography Denoising
 Computational Photography Denoising Jongmin Baek CS 478 Lecture Feb 13, 2012 Announcements Term project proposal Due Wednesday Proposal presentation Next Wednesday Send us your slides (Keynote, PowerPoint,
Computational Photography Denoising Jongmin Baek CS 478 Lecture Feb 13, 2012 Announcements Term project proposal Due Wednesday Proposal presentation Next Wednesday Send us your slides (Keynote, PowerPoint,
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Action Recognition in Video by Sparse Representation on Covariance Manifolds of Silhouette Tunnels
 Action Recognition in Video by Sparse Representation on Covariance Manifolds of Silhouette Tunnels Kai Guo, Prakash Ishwar, and Janusz Konrad Department of Electrical & Computer Engineering Motivation
Action Recognition in Video by Sparse Representation on Covariance Manifolds of Silhouette Tunnels Kai Guo, Prakash Ishwar, and Janusz Konrad Department of Electrical & Computer Engineering Motivation
UNIVERSITY OF CALIFORNIA SANTA CRUZ
 UNIVERSITY OF CALIFORNIA SANTA CRUZ LOCALLY ADAPTIVE KERNEL REGRESSION METHODS FOR MULTI-DIMENSIONAL SIGNAL PROCESSING A dissertation submitted in partial satisfaction of the requirements for the degree
UNIVERSITY OF CALIFORNIA SANTA CRUZ LOCALLY ADAPTIVE KERNEL REGRESSION METHODS FOR MULTI-DIMENSIONAL SIGNAL PROCESSING A dissertation submitted in partial satisfaction of the requirements for the degree
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Tracking Computer Vision Spring 2018, Lecture 24
 Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Tracking http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 24 Course announcements Homework 6 has been posted and is due on April 20 th. - Any questions about the homework? - How
Robust Video Super-Resolution with Registration Efficiency Adaptation
 Robust Video Super-Resolution with Registration Efficiency Adaptation Xinfeng Zhang a, Ruiqin Xiong b, Siwei Ma b, Li Zhang b, Wen Gao b a Institute of Computing Technology, Chinese Academy of Sciences,
Robust Video Super-Resolution with Registration Efficiency Adaptation Xinfeng Zhang a, Ruiqin Xiong b, Siwei Ma b, Li Zhang b, Wen Gao b a Institute of Computing Technology, Chinese Academy of Sciences,
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Classification of objects from Video Data (Group 30)
") Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Classification of objects from Video Data (Group 30) Sheallika Singh 12665 Vibhuti Mahajan 12792 Aahitagni Mukherjee 12001 M Arvind 12385 1 Motivation Video surveillance has been employed for a long time
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Corner Detection. GV12/3072 Image Processing.
 Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Corner Detection 1 Last Week 2 Outline Corners and point features Moravec operator Image structure tensor Harris corner detector Sub-pixel accuracy SUSAN FAST Example descriptor: SIFT 3 Point Features
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Features. Work on project 1. All is Vanity, by C. Allan Gilbert,
 Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
Image Features Work on project 1 All is Vanity, by C. Allan Gilbert, 1873-1929 Feature extrac*on: Corners and blobs c Mo*va*on: Automa*c panoramas Credit: Ma9 Brown Why extract features? Mo*va*on: panorama
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
LAPLACIAN OBJECT: ONE-SHOT OBJECT DETECTION BY LOCALITY PRESERVING PROJECTION Sujoy Kumar Biswas and Peyman Milanfar
 LAPLACIAN OBJECT: ONE-SHOT OBJECT DETECTION BY LOCALITY PRESERVING PROJECTION Sujoy Kumar Biswas and Peyman Milanfar Electrical Engineering Department University of California, Santa Cruz 1156 High Street,
LAPLACIAN OBJECT: ONE-SHOT OBJECT DETECTION BY LOCALITY PRESERVING PROJECTION Sujoy Kumar Biswas and Peyman Milanfar Electrical Engineering Department University of California, Santa Cruz 1156 High Street,
Space-Time Steering Kernel Regression for Video
 Space-Time Steering Kernel Regression for Video Version 1 Hiroyuki Takeda Multi-Dimensional Signal Processing Laboratory University of California, Santa Cruz Sep 2010 1 Directory Structure Kernel Regression
Space-Time Steering Kernel Regression for Video Version 1 Hiroyuki Takeda Multi-Dimensional Signal Processing Laboratory University of California, Santa Cruz Sep 2010 1 Directory Structure Kernel Regression
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Denoising an Image by Denoising its Components in a Moving Frame
 Denoising an Image by Denoising its Components in a Moving Frame Gabriela Ghimpețeanu 1, Thomas Batard 1, Marcelo Bertalmío 1, and Stacey Levine 2 1 Universitat Pompeu Fabra, Spain 2 Duquesne University,
Denoising an Image by Denoising its Components in a Moving Frame Gabriela Ghimpețeanu 1, Thomas Batard 1, Marcelo Bertalmío 1, and Stacey Levine 2 1 Universitat Pompeu Fabra, Spain 2 Duquesne University,
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SuRVoS Workbench. Super-Region Volume Segmentation. Imanol Luengo
 SuRVoS Workbench Super-Region Volume Segmentation Imanol Luengo Index - The project - What is SuRVoS - SuRVoS Overview - What can it do - Overview of the internals - Current state & Limitations - Future
SuRVoS Workbench Super-Region Volume Segmentation Imanol Luengo Index - The project - What is SuRVoS - SuRVoS Overview - What can it do - Overview of the internals - Current state & Limitations - Future
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Final Project Face Detection and Recognition
 Final Project Face Detection and Recognition Submission Guidelines: 1. Follow the guidelines detailed in the course website and information page.. Submission in pairs is allowed for all students registered
Final Project Face Detection and Recognition Submission Guidelines: 1. Follow the guidelines detailed in the course website and information page.. Submission in pairs is allowed for all students registered
Sketchable Histograms of Oriented Gradients for Object Detection
 Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
Sketchable Histograms of Oriented Gradients for Object Detection No Author Given No Institute Given Abstract. In this paper we investigate a new representation approach for visual object recognition. The
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Image Restoration and Background Separation Using Sparse Representation Framework
 Image Restoration and Background Separation Using Sparse Representation Framework Liu, Shikun Abstract In this paper, we introduce patch-based PCA denoising and k-svd dictionary learning method for the
Image Restoration and Background Separation Using Sparse Representation Framework Liu, Shikun Abstract In this paper, we introduce patch-based PCA denoising and k-svd dictionary learning method for the
Edge Detection. CMPUT 206: Introduction to Digital Image Processing. Nilanjan Ray. Source:
 Edge Detection CMPUT 206: Introduction to Digital Image Processing Nilanjan Ray Source: www.imagingbook.com What are edges? Are image positions where local image intensity changes significantly along a
Edge Detection CMPUT 206: Introduction to Digital Image Processing Nilanjan Ray Source: www.imagingbook.com What are edges? Are image positions where local image intensity changes significantly along a
Line, edge, blob and corner detection
 Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Line, edge, blob and corner detection Dmitri Melnikov MTAT.03.260 Pattern Recognition and Image Analysis April 5, 2011 1 / 33 Outline 1 Introduction 2 Line detection 3 Edge detection 4 Blob detection 5
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Harder case. Image matching. Even harder case. Harder still? by Diva Sian. by swashford
 Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Image matching Harder case by Diva Sian by Diva Sian by scgbt by swashford Even harder case Harder still? How the Afghan Girl was Identified by Her Iris Patterns Read the story NASA Mars Rover images Answer
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Local Descriptors. CS 510 Lecture #21 April 6 rd 2015
 Local Descriptors CS 510 Lecture #21 April 6 rd 2015 A Bit of Context, Transition David G. Lowe, "Three- dimensional object recogni5on from single two- dimensional images," Ar#ficial Intelligence, 31, 3
Local Descriptors CS 510 Lecture #21 April 6 rd 2015 A Bit of Context, Transition David G. Lowe, "Three- dimensional object recogni5on from single two- dimensional images," Ar#ficial Intelligence, 31, 3
Adaptive Learning of an Accurate Skin-Color Model
 Adaptive Learning of an Accurate Skin-Color Model Q. Zhu K.T. Cheng C. T. Wu Y. L. Wu Electrical & Computer Engineering University of California, Santa Barbara Presented by: H.T Wang Outline Generic Skin
Adaptive Learning of an Accurate Skin-Color Model Q. Zhu K.T. Cheng C. T. Wu Y. L. Wu Electrical & Computer Engineering University of California, Santa Barbara Presented by: H.T Wang Outline Generic Skin
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
CPSC 340: Machine Learning and Data Mining. Principal Component Analysis Fall 2016
 CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
CPSC 340: Machine Learning and Data Mining Principal Component Analysis Fall 2016 A2/Midterm: Admin Grades/solutions will be posted after class. Assignment 4: Posted, due November 14. Extra office hours:
IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION. Maral Mesmakhosroshahi, Joohee Kim
 IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION Maral Mesmakhosroshahi, Joohee Kim Department of Electrical and Computer Engineering Illinois Institute
IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION Maral Mesmakhosroshahi, Joohee Kim Department of Electrical and Computer Engineering Illinois Institute
Object Recognition. Lecture 11, April 21 st, Lexing Xie. EE4830 Digital Image Processing
 Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Object Recognition Lecture 11, April 21 st, 2008 Lexing Xie EE4830 Digital Image Processing http://www.ee.columbia.edu/~xlx/ee4830/ 1 Announcements 2 HW#5 due today HW#6 last HW of the semester Due May
Short Survey on Static Hand Gesture Recognition
 Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Short Survey on Static Hand Gesture Recognition Huu-Hung Huynh University of Science and Technology The University of Danang, Vietnam Duc-Hoang Vo University of Science and Technology The University of
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions
 Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
Extracting Spatio-temporal Local Features Considering Consecutiveness of Motions Akitsugu Noguchi and Keiji Yanai Department of Computer Science, The University of Electro-Communications, 1-5-1 Chofugaoka,
GRAPH-BASED JOINT DENOISING AND SUPER-RESOLUTION OF GENERALIZED PIECEWISE SMOOTH IMAGES
 GRAPH-BASED JOINT DENOISING AND SUPER-RESOLUTION OF GENERALIZED PIECEWISE SMOOTH IMAGES Wei Hu, Gene Cheung #, Xin Li $, Oscar C. Au Hong Kong University of Science & Technology, Hong Kong # National Institute
GRAPH-BASED JOINT DENOISING AND SUPER-RESOLUTION OF GENERALIZED PIECEWISE SMOOTH IMAGES Wei Hu, Gene Cheung #, Xin Li $, Oscar C. Au Hong Kong University of Science & Technology, Hong Kong # National Institute
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
THE ease of use and cost effectiveness have contributed to
 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL 16, NO 2, FEBRUARY 2007 349 Kernel Regression for Image Processing and Reconstruction Hiroyuki Takeda, Student Member, IEEE, Sina Farsiu, Member, IEEE, and Peyman
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL 16, NO 2, FEBRUARY 2007 349 Kernel Regression for Image Processing and Reconstruction Hiroyuki Takeda, Student Member, IEEE, Sina Farsiu, Member, IEEE, and Peyman
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuyuki Kayahara Multiple view geometry Stereo vision Epipolar geometry Lowe Hartley and Zisserman Depth map extraction Essential matrix
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference
 Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Detecting Burnscar from Hyperspectral Imagery via Sparse Representation with Low-Rank Interference Minh Dao 1, Xiang Xiang 1, Bulent Ayhan 2, Chiman Kwan 2, Trac D. Tran 1 Johns Hopkins Univeristy, 3400
Feature Descriptors. CS 510 Lecture #21 April 29 th, 2013
 Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
Feature Descriptors CS 510 Lecture #21 April 29 th, 2013 Programming Assignment #4 Due two weeks from today Any questions? How is it going? Where are we? We have two umbrella schemes for object recognition
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
EECS 556 Image Processing W 09. Image enhancement. Smoothing and noise removal Sharpening filters
 EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
Multi-Camera Calibration, Object Tracking and Query Generation
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Multi-Camera Calibration, Object Tracking and Query Generation Porikli, F.; Divakaran, A. TR2003-100 August 2003 Abstract An automatic object
Mobile Human Detection Systems based on Sliding Windows Approach-A Review
 Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Mobile Human Detection Systems based on Sliding Windows Approach-A Review Seminar: Mobile Human detection systems Njieutcheu Tassi cedrique Rovile Department of Computer Engineering University of Heidelberg
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
An Approach for Reduction of Rain Streaks from a Single Image
 An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Filtering Images Without Normalization
 Filtering Images Without Normalization Peyman Milanfar Google Research milanfar@google.com Abstract When applying a filter to an image, it often makes practical sense to maintain the local brightness level
Filtering Images Without Normalization Peyman Milanfar Google Research milanfar@google.com Abstract When applying a filter to an image, it often makes practical sense to maintain the local brightness level
Introduction to patch-based approaches for image processing F. Tupin
 Introduction to patch-based approaches for image processing F. Tupin Athens week Introduction Image processing Denoising and models Non-local / patch based approaches Principle Toy examples Limits and
Introduction to patch-based approaches for image processing F. Tupin Athens week Introduction Image processing Denoising and models Non-local / patch based approaches Principle Toy examples Limits and
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method
 The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method Parvin Aminnejad 1, Ahmad Ayatollahi 2, Siamak Aminnejad 3, Reihaneh Asghari Abstract In this work, we presented a novel approach
The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method Parvin Aminnejad 1, Ahmad Ayatollahi 2, Siamak Aminnejad 3, Reihaneh Asghari Abstract In this work, we presented a novel approach
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4