V Advanced Data Structures
|
|
|
- Rhoda York
- 5 years ago
- Views:
Transcription

1 V Advanced Data Structures B-Trees Fibonacci Heaps 18 B-Trees B-trees are similar to RBTs, but they are better at minimizing disk I/O operations Many database systems use B-trees, or variants of them, to store information B-tree nodes may have many children, from a few to thousands The branching factor of a B-tree can be quite large, although it usually depends on characteristics of the disk unit used MAT AA+DS, Fall Nov
 B-trees generalize BSTs in a natural manner If an")
2 B-trees are similar to RBTs in that every -node B-tree has height (lg ) The exact height of a B-tree can be considerably less than that of a RBT, because its branching factor the base of the logarithm that expresses its height can be much larger Therefore, we can also use B-trees to implement many dynamic-set operations in time (lg ) B-trees generalize BSTs in a natural manner If an internal B-tree node contains keys, then has +1children MAT AA+DS, Fall Nov MAT AA+DS, Fall Nov
3 18.1 De nition of B-trees A B-tree is a rooted tree (whose root is ) having the following properties: 1. Every node has the following attributes: a), the number of keys currently stored in, b) the keys themselves,,,,, stored in nondecreasing order, so that, c), a Boolean value that is TRUE if is a leaf and FALSE if is an internal node MAT AA+DS, Fall Nov Each internal node also contains +1 pointers,,, to its children. Leaf nodes have no children, and so their attributes are unde ned 3. The keys separate the ranges of keys stored in each subtree: if is any key stored in the subtree with root, then 4. All leaves have the same depth, which is the tree s height MAT AA+DS, Fall Nov
4 5. Nodes have lower and upper bounds on the number of keys they can contain. We express these bounds in terms of a xed integer 2 called the minimum degree of the B-tree: a) Every node (except the root) must have at least 1keys. Every internal node (except the root) thus has at least children. If the tree is nonempty, the root must have at least one key. b) Every node may contain at most 1keys. Therefore, an internal node may have at most children. We say that a node is full if it contains exactly 1 keys. MAT AA+DS, Fall Nov The height of a B-tree The simplest B-tree occurs when =2 Every internal node then has either 2, 3, or 4 children, and we have a tree In practice, however, much larger values of yield B-trees with smaller height Theorem 18.1 If 1, then for any -key B-tree of height and minimum degree 2, +1 log 2 MAT AA+DS, Fall Nov
5 Proof The root of a B-tree contains at least one key, and all other nodes contain at least 1 keys. Thus,, whose height is, has at least 2 nodes at depth 1, at least nodes at depth 2, at least nodes at depth 3, and so on, until at depth it has at least nodes. Thus, the number of keys satis es the inequality 1+ 1 = 1 + 2(t 1) 1 1 = 2 1 We get + 1). 2Taking base- logarithms of both sides proves the theorem. MAT AA+DS, Fall Nov Here is the power of B-trees, w.r.t. RBTs The height of the tree grows as (lg ) in both cases ( is a constant) For B-trees the base of the logarithm can be many times larger Thus, B-trees save a factor of about lg over RBTs in the number of nodes examined for most tree operations Because we usually have to access the disk to examine an arbitrary node in a tree, B-trees avoid a substantial number of disk accesses MAT AA+DS, Fall Nov
6 18.2 Basic operations on B-trees Searching a B-tree, at each internal node, we make an + 1)-way branching decision B-TREE-SEARCH is a simple generalization of the TREE-SEARCH procedure de ned for BSTs B-TREE-SEARCH inputs are a pointer to the root node and key to be searched in that subtree The top-level call is B-TREE-SEARCH ) If is in the tree, it returns the ordered pair ) of a node and an index s.t. MAT AA+DS, Fall Nov B-TREE-SEARCH ) while and if and 5. return ) 6. elseif 7. return NIL 8. else DISK-READ ) 9. return B-TREE-SEARCH ) MAT AA+DS, Fall Nov
7 As in the TREE-SEARCH procedure for BSTs, the nodes encountered during the recursion form a simple path downward from the root of the tree B-TREE-SEARCH accesses (log ) disk pages, where is the height of the B-tree and is the number of keys Since < 2, the while loop of lines 2 3 takes ) time within each node, and the total CPU time is log ) MAT AA+DS, Fall Nov Creating an empty B-tree ALLOCATE-NODE allocates one disk page to be used as a new node in (1) time It requires no DISK-READ, since there is as yet no useful information stored on the disk B-TREE-CREATE ) 1. ALLOCATE-NODE() 2. TRUE DISK-WRITE ) 5.. MAT AA+DS, Fall Nov
8 Inserting a key into a B-tree We insert the new key into an existing leaf node We need an operation that splits a full node (having 1keys) around its median key into two nodes having only 1keys Median key moves up into s parent to identify the dividing point between the two new trees But if s parent is also full, we must split it before we can insert the new key; we could end up splitting full nodes all the way up the tree MAT AA+DS, Fall Nov As with a BST, we can insert a key into a B-tree in a single pass down from the root to a leaf We do not wait to nd out whether we will actually need to split a full node in order to do the insertion As we travel down the tree, we split each full node we come to along the way (including the leaf itself) Thus whenever we want to split a full node, we are assured that its parent is not full MAT AA+DS, Fall Nov
9 Splitting a node in a B-tree B-TREE-SPLIT-CHILD takes as input a nonfull internal node (in main memory) and an index such that (in main memory) is full The procedure then splits this child in two and adjusts so that it has an additional child To split a full root, we will rst make the root a child of a new empty root node, so that we can use B-TREE-SPLIT-CHILD The tree thus grows in height by one; splitting is the only means by which the tree grows MAT AA+DS, Fall Nov MAT AA+DS, Fall Nov
10 B-TREE-SPLIT-CHILD(, ) 1. ALLOCATE-NODE() for 1to if not 8. for 1to for. + 1 downto for downto DISK-WRITE 19.DISK-WRITE 20.DISK-WRITE( ) MAT AA+DS, Fall Nov B-TREE-INSERT(, ) if = ALLOCATE-NODE() FALSE B-TREE-SPLIT-CHILD, 1) 9. B-TREE-INSERT-NONFULL ) 10.else B-TREE-INSERT-NONFULL(, ) MAT AA+DS, Fall Nov
11 MAT AA+DS, Fall Nov B-TREE-INSERT- NONFULL ) if 3. while 1and DISK-WRITE( ) 9. else while 1 and DISK-READ ) 13. if = B-TREE-SPLIT- CHILD ) 15. if B-TREE-INSERT- NONFULL(., ) MAT AA+DS, Fall Nov
12 For a B-tree of height, B-TREE-INSERT performs ) disk accesses, since only (1) DISK-READ and DISK-WRITE operations occur between calls to B-TREE-INSERT-NONFULL The total CPU time used is log ) B-TREE-INSERT-NONFULL is tail-recursive, and can alternatively be implemented as a while loop the number of pages that need to be in main memory at any time is (1) MAT AA+DS, Fall Nov Deleting a key from a B-tree B-TREE-DELETE deletes the key from the subtree rooted at We design it to guarantee that whenever it calls itself recursively on a node, the number of keys in is at least the minimum degree This condition requires one more key than the minimum required by usual B-tree conditions Sometimes a key may have to be moved into a child node before recursion descends to that child MAT AA+DS, Fall Nov
, then we delete, and s only child becomes the new root of the tree,")
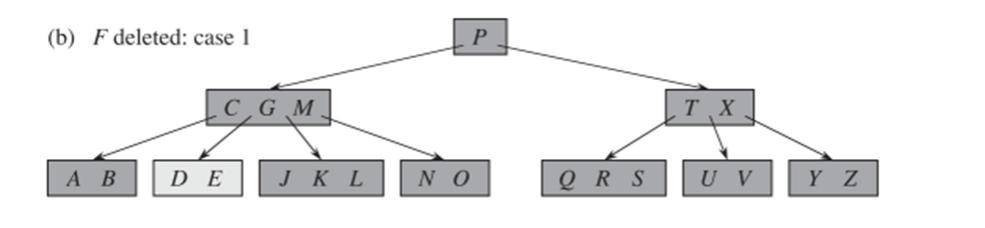
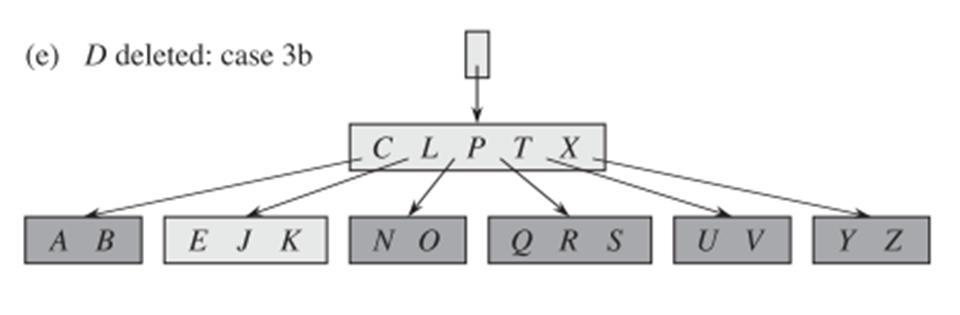
13 The strengthened condition allows us to delete a key in one downward pass without having to back up (with one exception) Interpret the following speci cation for deletion from a B-tree with the understanding that if the root node ever becomes an internal node having no keys (this situation can occur in cases 2c and 3b), then we delete, and s only child becomes the new root of the tree, decreasing the height of the tree by one and preserving the property that the root of the tree contains at least one key (unless it is empty) MAT AA+DS, Fall Nov =3,therefore min=2and max=5 MAT AA+DS, Fall Nov

14 MAT AA+DS, Fall Nov MAT AA+DS, Fall Nov

15 MAT AA+DS, Fall Nov MAT AA+DS, Fall Nov
 If the child that precedes in node has at least keys, then nd the predecessor of in the subtree rooted")
 b) If has fewer than keys, then, symmetrically, examine the child that follows in node.")
16 MAT AA+DS, Fall Nov Let us sketch how deletion works 1. If the key is a leaf node, delete from 2. If is in an internal node, do the following: a) If the child that precedes in node has at least keys, then nd the predecessor of in the subtree rooted at. Recursively delete, and replace by in. (We can nd and delete it in a single downward pass.) b) If has fewer than keys, then, symmetrically, examine the child that follows in node. If has at least keys, then nd the successor of in the subtree rooted at. Recursively delete, and replace by in. MAT AA+DS, Fall Nov
17 c) Otherwise, if both and have only 1keys, merge and all of into, so that loses both and the pointer to, and now contains 1keys. Then free and recursively delete from. 3. If the key is not present in internal node, determine the root of the appropriate subtree that must contain, if is in the tree at all. If has only 1keys, execute step 3a or 3b as necessary to guarantee that we descend to a node containing at least keys. Then nish by recursing on the appropriate child of. MAT AA+DS, Fall Nov a) If has only 1keys but has an immediate sibling with at least keys, give an extra key by moving a key from down into, moving a key from s immediate left or right sibling up into, and moving the appropriate child pointer from the sibling into. b) If and both of s immediate siblings have 1keys, merge with one sibling, which involves moving a key from down into the new merged node to become the median key for that node. MAT AA+DS, Fall Nov
18 Most of the keys in a B-tree are in the leaves; we expect that in practice deletions are most often used to delete keys from leaves B-TREE-DELETE acts in one downward pass through the tree, without having to back up Deleting a key in an internal node, the procedure may have to return to replace the key with its predecessor or successor (2a and 2b) Involves only ) disk operations for a B-tree of height, since only (1) calls to DISK-READ and DISK-WRITE are made between recursive invocations of the procedure The CPU time required is = ( log ) MAT AA+DS, Fall Nov Fibonacci Heaps 1. The Fibonacci heap data structure supports a set of operations that constitutes what is known as a mergeable heap 2. Several Fibonacci-heap operations run in constant amortized time, which makes this data structure well suited for applications that invoke these operations frequently MAT AA+DS, Fall Nov
19 Mergeable heaps Support the following operations, each element has a key: MAKE-HEAP() creates and returns a new empty heap INSERT inserts element, whose key has already been lled in, into heap MINIMUM ) returns a pointer to the element in heap whose key is minimum EXTRACT-MIN ) deletes the element from heap whose key is minimum, returning a pointer to the element MAT AA+DS, Fall Nov UNION creates and returns a new heap that contains all the elements of heaps and. Heaps and are destroyed by this operation Fibonacci heaps also support the following two operations: DECREASE-KEY ) assigns to element within heap the new key value, which we assume to be no greater than its current key value DELETE ) deletes element from heap MAT AA+DS, Fall Nov
20 Procedure Binary Heap (worst-case) Fibonacci Heap (amortized) MAKE-HEAP (1) (1) INSERT (lg ) (1) MINIMUM (1) (1) EXTRACT-MIN (lg ) (lg ) UNION ) (1) DECREASE-KEY (lg ) (1) DELETE (lg ) (lg ) MAT AA+DS, Fall Nov Fibonacci heaps in theory and practice Fibonacci heaps are especially desirable when the number of EXTRACT-MIN and DELETE operations is small relative to the number of other operations performed E.g., some algorithms for graph problems may call DECREASE-KEY once per edge For dense graphs, with many edges, the (1) amortized time of each call of DECREASE-KEY is a big improvement over the (lg ) worst-case time of binary heaps Fast algorithms for problems such as computing minimum spanning trees and nding single-source shortest paths make essential use of Fibonacci heaps MAT AA+DS, Fall Nov
21 The constant factors and programming complexity of Fibonacci heaps make them less desirable than ordinary binary (or -ary) heaps for most applications, except for certain applications that manage large amounts of data Thus, Fibonacci heaps are predominantly of theoretical interest If a much simpler data structure with the same amortized time bounds as Fibonacci heaps were developed, it would be of practical use as well MAT AA+DS, Fall Nov Fibonacci heaps are based on rooted trees We represent each element by a node within a tree, and each node has a key attribute We use the term node instead of element We also ignore issues of allocating nodes prior to insertion and freeing nodes following deletion A Fibonacci heap is a collection of rooted trees that are min-heap ordered I.e., each tree obeys the min-heap property: the key of a node is greater than or equal to the key of its parent MAT AA+DS, Fall Nov
22 MAT AA+DS, Fall Nov Each node contains a pointer to its parent and a pointer to any one of its children The children of are linked together in a circular, doubly linked list the child list of Each child in a child list has pointers and that point to s left and right siblings, respectively If is an only child, then Siblings may appear in a child list in any order MAT AA+DS, Fall Nov
23 MAT AA+DS, Fall Nov We store the number of children in the child list of node in The Boolean attribute indicates whether node has lost a child since the last time was made the child of another node Newly created nodes are unmarked, and a node becomes unmarked whenever it is made the child of another node Until we look at the DECREASE-KEY operation we will just set all mark attributes to FALSE We access a given Fibonacci heap by a pointer. min to the root of a tree containing the minimum key MAT AA+DS, Fall Nov
24 When a Fibonacci heap is empty,. min is NIL The roots of all the trees in a heap are linked together using their left and right pointers into a circular, doubly linked list called the root list The pointer. min thus points to the node in the root list whose key is minimum Trees may appear in any order within a root list We rely on one other attribute for a Fibonacci heap :, the number of nodes currently in MAT AA+DS, Fall Nov Potential function We use the potential method to analyze the performance of Fibonacci heap operations Let ) be the number of trees in the root list of Fibonacci heap and ) the number of marked nodes in We de ne the potential ) of heap by + 2 ) For example, the potential of the Fibonacci heap shown above is 5+2 3=11 MAT AA+DS, Fall Nov
25 The potential of a set of Fibonacci heaps is the sum of the potentials of its constituent heaps We assume that a unit of potential can cover the cost of any of the speci c constant-time pieces of work that we might encounter Fibonacci heap application begins with no heaps The initial potential, therefore, is 0, and the potential is nonnegative at all subsequent times An upper bound on the total amortized cost thus provides an upper bound on the total actual cost for the sequence of operations MAT AA+DS, Fall Nov Maximum degree Amortized analyses we perform assume that we know an upper bound ) on the maximum degree of any node in an -node Fibonacci heap When only the mergeable-heap operations are supported lg We shall show that when we support DECREASE- KEY and DELETE as well, (lg ) MAT AA+DS, Fall Nov
26 19.2 Mergeable-heap operations The operations delay work as long as possible; various operations have performance trade-offs E.g., we insert a node by adding it to the root list, which takes just constant time If we insert nodes to an empty Fibonacci heap, the heap consist of just a root list of nodes Trade-off: if we then perform EXTRACT-MIN on, after removing the node that. min points to, we have to look through each of the remaining 1 nodes to nd the new minimum node MAT AA+DS, Fall Nov As long as we have to go through the entire root list during the EXTRACT-MIN operation, we also consolidate nodes into min-heapordered trees to reduce the size of the root list We shall see that, no matter what the root list looks like before a EXTRACT-MIN operation, afterward each node in the root list has a degree that is unique within the root list, which leads to a root list of size at most +1 MAT AA+DS, Fall Nov
27 Creating a new Fibonacci heap To make an empty Fibonacci heap, the MAKE- FIB-HEAP procedure allocates and returns the Fibonacci heap object, where =0and =NIL; there are no trees in Because =0and =0, the potential of the empty Fibonacci heap is =0 The amortized cost of MAKE-FIB-HEAP is thus equal to its (1) actual cost MAT AA+DS, Fall Nov FIB-HEAP-INSERT(, ) NIL 3. NIL 4. FALSE 5. if =NIL 6. create a root list for containing just 7..min 8. else insert into s root list 9. if. min. 10..min MAT AA+DS, Fall Nov
, and the increase in potential is +1 +2 + 2 =1 Since the actual cost is (1), the amortized cost is 1 + 1 = (1) MAT-72006 AA+DS, Fall 2014 6-Nov-14")
28 MAT AA+DS, Fall Nov To determine the amortized cost of FIB-HEAP- INSERT, let be the input Fibonacci heap and be the resulting Fibonacci heap Then, +1and ), and the increase in potential is =1 Since the actual cost is (1), the amortized cost is = (1) MAT AA+DS, Fall Nov
29 FIB-HEAP-UNION 1. MAKE FIB HEAP() 2..min. min 3. concatenate the root list of with the root list of 4. if.min=nil) or.min NIL and.min.. min. ) 5..min. min return MAT AA+DS, Fall Nov The change in potential is ) = ( + 2 ( =0 because and = The amortized cost of FIB-HEAP-UNION is therefore equal to its (1) actual cost MAT AA+DS, Fall Nov
30 Extracting the minimum node The process of extracting the minimum node is the most complicated of the operations so far It is also where the delayed work of consolidating trees in the root list nally occurs The following code assumes that when a node is removed, pointers remaining in the linked list are updated, but pointers in the extracted node are left unchanged It also calls the auxiliary procedure CONSOLIDATE MAT AA+DS, Fall Nov FIB-HEAP-EXTRACT-MIN( ) 1.. min 2. if NIL 3. for each child of 4. add to the root list of 5. NIL 6. remove from the root list of 7. if 8..min NIL 9. else. min 10. CONSOLIDATE ) return MAT AA+DS, Fall Nov
31 MAT AA+DS, Fall Nov CONSOLIDATE reduces the number of trees in the Fibonacci heap Consolidating the root list consists of repeatedly executing the following steps until every root in the root list has a distinct degree value: 1. Find two roots and in the root list with the same degree. Without loss of generality, let 2. Remove from the root list, and make a child of by calling the FIB-HEAP-LINK procedure. This procedure increments the attribute and clears the mark on MAT AA+DS, Fall Nov
32 MAT AA+DS, Fall Nov MAT AA+DS, Fall Nov
33 Decreasing a key FIB-HEAP-DECREASE-KEY ) 1. if 2. error new key is greater than current key if NIL and 6. CUT ) 7. CASCADING-CUT ) 8. if. min. 9.. min MAT AA+DS, Fall Nov CUT(,, ) 1. remove from the child list of, decrementing 2. add to the root list of 3. NIL 4. FALSE CASCADING-CUT ) if NIL 3. if =FALSE 4. TRUE 5. else CUT 6. CASCADING-CUT(, ) MAT AA+DS, Fall Nov
34 MAT AA+DS, Fall Nov FIB-HEAP-DECREASE-KEY creates a new tree rooted at node and clears s mark bit Each of the calls of CASCADING-CUT, except the last one, cuts a marked node and clears the mark bit Afterward, the heap contains trees the original trees, 1trees produced by cascading cuts, and the tree rooted at and at most +2marked nodes 1were unmarked by cascading cuts and the last call of CASCADING-CUT may have marked a node MAT AA+DS, Fall Nov
35 The change in potential is therefore at most =4 Thus, the amortized cost of FIB-HEAP-DECREASE- KEY is at most + 4 (1), since we can scale up the units of potential to dominate the constant hidden in When a marked node is cut by a cascading cut, its mark bit is cleared, which reduces the potential by 2 One unit of potential pays for the cut and the clearing of the mark bit, and the other unit compensates for the unit increase in potential due to node becoming a root MAT AA+DS, Fall Nov Deleting a node We assume that there is no key value of currently in the Fibonacci heap FIB-HEAP-DELETE ) 1. FIB-HEAP-DECREASE-KEY ) 2. FIB-HEAP-EXTRACT-MIN ) The amortized time of FIB-HEAP-DELETE is the sum of the (1) amortized time of FIB-HEAP- DECREASE-KEY and the )amortized time of FIB-HEAP-EXTRACT-MIN MAT AA+DS, Fall Nov
V Advanced Data Structures
 V Advanced Data Structures B-Trees Fibonacci Heaps 18 B-Trees B-trees are similar to RBTs, but they are better at minimizing disk I/O operations Many database systems use B-trees, or variants of them,
V Advanced Data Structures B-Trees Fibonacci Heaps 18 B-Trees B-trees are similar to RBTs, but they are better at minimizing disk I/O operations Many database systems use B-trees, or variants of them,
18.3 Deleting a key from a B-tree
 18.3 Deleting a key from a B-tree B-TREE-DELETE deletes the key from the subtree rooted at We design it to guarantee that whenever it calls itself recursively on a node, the number of keys in is at least
18.3 Deleting a key from a B-tree B-TREE-DELETE deletes the key from the subtree rooted at We design it to guarantee that whenever it calls itself recursively on a node, the number of keys in is at least
Let the dynamic table support the operations TABLE-INSERT and TABLE-DELETE It is convenient to use the load factor ( )
") 17.4 Dynamic tables Let us now study the problem of dynamically expanding and contracting a table We show that the amortized cost of insertion/ deletion is only (1) Though the actual cost of an operation
17.4 Dynamic tables Let us now study the problem of dynamically expanding and contracting a table We show that the amortized cost of insertion/ deletion is only (1) Though the actual cost of an operation
Decreasing a key FIB-HEAP-DECREASE-KEY(,, ) 3.. NIL. 2. error new key is greater than current key 6. CASCADING-CUT(, )
 3.. NIL. 2. error new key is greater than current key 6. CASCADING-CUT(, )") Decreasing a key FIB-HEAP-DECREASE-KEY(,, ) 1. if >. 2. error new key is greater than current key 3.. 4.. 5. if NIL and.
Decreasing a key FIB-HEAP-DECREASE-KEY(,, ) 1. if >. 2. error new key is greater than current key 3.. 4.. 5. if NIL and.
We assume uniform hashing (UH):
:") We assume uniform hashing (UH): the probe sequence of each key is equally likely to be any of the! permutations of 0,1,, 1 UH generalizes the notion of SUH that produces not just a single number, but a
We assume uniform hashing (UH): the probe sequence of each key is equally likely to be any of the! permutations of 0,1,, 1 UH generalizes the notion of SUH that produces not just a single number, but a
B-Trees. Version of October 2, B-Trees Version of October 2, / 22
 B-Trees Version of October 2, 2014 B-Trees Version of October 2, 2014 1 / 22 Motivation An AVL tree can be an excellent data structure for implementing dictionary search, insertion and deletion Each operation
B-Trees Version of October 2, 2014 B-Trees Version of October 2, 2014 1 / 22 Motivation An AVL tree can be an excellent data structure for implementing dictionary search, insertion and deletion Each operation
22 Elementary Graph Algorithms. There are two standard ways to represent a
 VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
22 Elementary Graph Algorithms. There are two standard ways to represent a
 VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
VI Graph Algorithms Elementary Graph Algorithms Minimum Spanning Trees Single-Source Shortest Paths All-Pairs Shortest Paths 22 Elementary Graph Algorithms There are two standard ways to represent a graph
16 Greedy Algorithms
 16 Greedy Algorithms Optimization algorithms typically go through a sequence of steps, with a set of choices at each For many optimization problems, using dynamic programming to determine the best choices
16 Greedy Algorithms Optimization algorithms typically go through a sequence of steps, with a set of choices at each For many optimization problems, using dynamic programming to determine the best choices
9/24/ Hash functions
 11.3 Hash functions A good hash function satis es (approximately) the assumption of SUH: each key is equally likely to hash to any of the slots, independently of the other keys We typically have no way
11.3 Hash functions A good hash function satis es (approximately) the assumption of SUH: each key is equally likely to hash to any of the slots, independently of the other keys We typically have no way
Lecture 3: B-Trees. October Lecture 3: B-Trees
 October 2017 Remarks Search trees The dynamic set operations search, minimum, maximum, successor, predecessor, insert and del can be performed efficiently (in O(log n) time) if the search tree is balanced.
October 2017 Remarks Search trees The dynamic set operations search, minimum, maximum, successor, predecessor, insert and del can be performed efficiently (in O(log n) time) if the search tree is balanced.
Data Structures. Motivation
 Data Structures B Trees Motivation When data is too large to fit in main memory, it expands to the disk. Disk access is highly expensive compared to a typical computer instruction The number of disk accesses
Data Structures B Trees Motivation When data is too large to fit in main memory, it expands to the disk. Disk access is highly expensive compared to a typical computer instruction The number of disk accesses
Advanced Algorithms. Class Notes for Thursday, September 18, 2014 Bernard Moret
 Advanced Algorithms Class Notes for Thursday, September 18, 2014 Bernard Moret 1 Amortized Analysis (cont d) 1.1 Side note: regarding meldable heaps When we saw how to meld two leftist trees, we did not
Advanced Algorithms Class Notes for Thursday, September 18, 2014 Bernard Moret 1 Amortized Analysis (cont d) 1.1 Side note: regarding meldable heaps When we saw how to meld two leftist trees, we did not
Chapter 5 Data Structures Algorithm Theory WS 2016/17 Fabian Kuhn
 Chapter 5 Data Structures Algorithm Theory WS 06/ Fabian Kuhn Examples Dictionary: Operations: insert(key,value), delete(key), find(key) Implementations: Linked list: all operations take O(n) time (n:
Chapter 5 Data Structures Algorithm Theory WS 06/ Fabian Kuhn Examples Dictionary: Operations: insert(key,value), delete(key), find(key) Implementations: Linked list: all operations take O(n) time (n:
B-Trees Data structures on secondary storage primary memory main memory
 18 B-Trees B-trees are balanced search trees designed to work well on magnetic disks or other direct-access secondary storage devices. B-trees are similar to red-black trees (Chapter 13), but they are
18 B-Trees B-trees are balanced search trees designed to work well on magnetic disks or other direct-access secondary storage devices. B-trees are similar to red-black trees (Chapter 13), but they are
Ensures that no such path is more than twice as long as any other, so that the tree is approximately balanced
 13 Red-Black Trees A red-black tree (RBT) is a BST with one extra bit of storage per node: color, either RED or BLACK Constraining the node colors on any path from the root to a leaf Ensures that no such
13 Red-Black Trees A red-black tree (RBT) is a BST with one extra bit of storage per node: color, either RED or BLACK Constraining the node colors on any path from the root to a leaf Ensures that no such
15.4 Longest common subsequence
 15.4 Longest common subsequence Biological applications often need to compare the DNA of two (or more) different organisms A strand of DNA consists of a string of molecules called bases, where the possible
15.4 Longest common subsequence Biological applications often need to compare the DNA of two (or more) different organisms A strand of DNA consists of a string of molecules called bases, where the possible
II (Sorting and) Order Statistics
 Order Statistics") II (Sorting and) Order Statistics Heapsort Quicksort Sorting in Linear Time Medians and Order Statistics 8 Sorting in Linear Time The sorting algorithms introduced thus far are comparison sorts Any comparison
II (Sorting and) Order Statistics Heapsort Quicksort Sorting in Linear Time Medians and Order Statistics 8 Sorting in Linear Time The sorting algorithms introduced thus far are comparison sorts Any comparison
Fibonacci Heaps. Structure. Implementation. Implementation. Delete Min. Delete Min. Set of min-heap ordered trees min
 Algorithms Fibonacci Heaps -2 Structure Set of -heap ordered trees Fibonacci Heaps 1 Some nodes marked. H Data Structures and Algorithms Andrei Bulatov Algorithms Fibonacci Heaps - Algorithms Fibonacci
Algorithms Fibonacci Heaps -2 Structure Set of -heap ordered trees Fibonacci Heaps 1 Some nodes marked. H Data Structures and Algorithms Andrei Bulatov Algorithms Fibonacci Heaps - Algorithms Fibonacci
10/24/ Rotations. 2. // s left subtree s right subtree 3. if // link s parent to elseif == else 11. // put x on s left
 13.2 Rotations MAT-72006 AA+DS, Fall 2013 24-Oct-13 368 LEFT-ROTATE(, ) 1. // set 2. // s left subtree s right subtree 3. if 4. 5. // link s parent to 6. if == 7. 8. elseif == 9. 10. else 11. // put x
13.2 Rotations MAT-72006 AA+DS, Fall 2013 24-Oct-13 368 LEFT-ROTATE(, ) 1. // set 2. // s left subtree s right subtree 3. if 4. 5. // link s parent to 6. if == 7. 8. elseif == 9. 10. else 11. // put x
Algorithm Theory, Winter Term 2015/16 Problem Set 5 - Sample Solution
 Albert-Ludwigs-Universität, Inst. für Informatik Prof. Dr. Fabian Kuhn M. Ahmadi, O. Saukh, A. R. Molla November, 20 Algorithm Theory, Winter Term 20/6 Problem Set - Sample Solution Exercise : Amortized
Albert-Ludwigs-Universität, Inst. für Informatik Prof. Dr. Fabian Kuhn M. Ahmadi, O. Saukh, A. R. Molla November, 20 Algorithm Theory, Winter Term 20/6 Problem Set - Sample Solution Exercise : Amortized
Algorithms. Deleting from Red-Black Trees B-Trees
 Algorithms Deleting from Red-Black Trees B-Trees Recall the rules for BST deletion 1. If vertex to be deleted is a leaf, just delete it. 2. If vertex to be deleted has just one child, replace it with that
Algorithms Deleting from Red-Black Trees B-Trees Recall the rules for BST deletion 1. If vertex to be deleted is a leaf, just delete it. 2. If vertex to be deleted has just one child, replace it with that
Questions from the material presented in this lecture
 Advanced Data Structures Questions from the material presented in this lecture January 8, 2015 This material illustrates the kind of exercises and questions you may get at the final colloqium. L1. Introduction.
Advanced Data Structures Questions from the material presented in this lecture January 8, 2015 This material illustrates the kind of exercises and questions you may get at the final colloqium. L1. Introduction.
CS301 - Data Structures Glossary By
 CS301 - Data Structures Glossary By Abstract Data Type : A set of data values and associated operations that are precisely specified independent of any particular implementation. Also known as ADT Algorithm
CS301 - Data Structures Glossary By Abstract Data Type : A set of data values and associated operations that are precisely specified independent of any particular implementation. Also known as ADT Algorithm
Trees (Part 1, Theoretical) CSE 2320 Algorithms and Data Structures University of Texas at Arlington
 CSE 2320 Algorithms and Data Structures University of Texas at Arlington") Trees (Part 1, Theoretical) CSE 2320 Algorithms and Data Structures University of Texas at Arlington 1 Trees Trees are a natural data structure for representing specific data. Family trees. Organizational
Trees (Part 1, Theoretical) CSE 2320 Algorithms and Data Structures University of Texas at Arlington 1 Trees Trees are a natural data structure for representing specific data. Family trees. Organizational
CLRS 19 Fibonacci Heaps
 CLRS 19 Fibonacci Heaps Mergeable Heaps A mergeable heap is any data structure that supports the following five operations, (each element has a key): MAKE-HEAP() creates and returns a new heap containing
CLRS 19 Fibonacci Heaps Mergeable Heaps A mergeable heap is any data structure that supports the following five operations, (each element has a key): MAKE-HEAP() creates and returns a new heap containing
CS Fall 2010 B-trees Carola Wenk
 CS 3343 -- Fall 2010 B-trees Carola Wenk 10/19/10 CS 3343 Analysis of Algorithms 1 External memory dictionary Task: Given a large amount of data that does not fit into main memory, process it into a dictionary
CS 3343 -- Fall 2010 B-trees Carola Wenk 10/19/10 CS 3343 Analysis of Algorithms 1 External memory dictionary Task: Given a large amount of data that does not fit into main memory, process it into a dictionary
W4231: Analysis of Algorithms
 W4231: Analysis of Algorithms From Binomial Heaps to Fibonacci Heaps Fibonacci Heaps 10/7/1999 We first prove that in Binomial Heaps insert and find-min take amortized O(1) time, while still having insert,
W4231: Analysis of Algorithms From Binomial Heaps to Fibonacci Heaps Fibonacci Heaps 10/7/1999 We first prove that in Binomial Heaps insert and find-min take amortized O(1) time, while still having insert,
Analysis of Algorithms
 Analysis of Algorithms Concept Exam Code: 16 All questions are weighted equally. Assume worst case behavior and sufficiently large input sizes unless otherwise specified. Strong induction Consider this
Analysis of Algorithms Concept Exam Code: 16 All questions are weighted equally. Assume worst case behavior and sufficiently large input sizes unless otherwise specified. Strong induction Consider this
Advanced algorithms. binary heap, d-ary heap, binomial heap, amortized analysis, Fibonacci heap. Jiří Vyskočil, Radek Mařík 2013
 binary heap, d-ary heap, binomial heap, amortized analysis, Fibonacci heap Jiří Vyskočil, Radek Mařík 2013 heap Heaps [haldy] a heap is a specialized data structure (usually tree-based) that satisfies
binary heap, d-ary heap, binomial heap, amortized analysis, Fibonacci heap Jiří Vyskočil, Radek Mařík 2013 heap Heaps [haldy] a heap is a specialized data structure (usually tree-based) that satisfies
Data Structures and Algorithms
 Data Structures and Algorithms CS245-2008S-19 B-Trees David Galles Department of Computer Science University of San Francisco 19-0: Indexing Operations: Add an element Remove an element Find an element,
Data Structures and Algorithms CS245-2008S-19 B-Trees David Galles Department of Computer Science University of San Francisco 19-0: Indexing Operations: Add an element Remove an element Find an element,
CSE 548: Analysis of Algorithms. Lectures 14 & 15 ( Dijkstra s SSSP & Fibonacci Heaps )
") CSE 548: Analysis of Algorithms Lectures 14 & 15 ( Dijkstra s SSSP & Fibonacci Heaps ) Rezaul A. Chowdhury Department of Computer Science SUNY Stony Brook Fall 2012 Fibonacci Heaps ( Fredman & Tarjan,
CSE 548: Analysis of Algorithms Lectures 14 & 15 ( Dijkstra s SSSP & Fibonacci Heaps ) Rezaul A. Chowdhury Department of Computer Science SUNY Stony Brook Fall 2012 Fibonacci Heaps ( Fredman & Tarjan,
(2,4) Trees. 2/22/2006 (2,4) Trees 1
 Trees. 2/22/2006 (2,4) Trees 1") (2,4) Trees 9 2 5 7 10 14 2/22/2006 (2,4) Trees 1 Outline and Reading Multi-way search tree ( 10.4.1) Definition Search (2,4) tree ( 10.4.2) Definition Search Insertion Deletion Comparison of dictionary
(2,4) Trees 9 2 5 7 10 14 2/22/2006 (2,4) Trees 1 Outline and Reading Multi-way search tree ( 10.4.1) Definition Search (2,4) tree ( 10.4.2) Definition Search Insertion Deletion Comparison of dictionary
Worst-case running time for RANDOMIZED-SELECT
 Worst-case running time for RANDOMIZED-SELECT is ), even to nd the minimum The algorithm has a linear expected running time, though, and because it is randomized, no particular input elicits the worst-case
Worst-case running time for RANDOMIZED-SELECT is ), even to nd the minimum The algorithm has a linear expected running time, though, and because it is randomized, no particular input elicits the worst-case
So the actual cost is 2 Handout 3: Problem Set 1 Solutions the mark counter reaches c, a cascading cut is performed and the mark counter is reset to 0
 Massachusetts Institute of Technology Handout 3 6854/18415: Advanced Algorithms September 14, 1999 David Karger Problem Set 1 Solutions Problem 1 Suppose that we have a chain of n 1 nodes in a Fibonacci
Massachusetts Institute of Technology Handout 3 6854/18415: Advanced Algorithms September 14, 1999 David Karger Problem Set 1 Solutions Problem 1 Suppose that we have a chain of n 1 nodes in a Fibonacci
Data Structures Week #6. Special Trees
 Data Structures Week #6 Special Trees Outline Adelson-Velskii-Landis (AVL) Trees Splay Trees B-Trees 21.Aralık.2010 Borahan Tümer, Ph.D. 2 AVL Trees 21.Aralık.2010 Borahan Tümer, Ph.D. 3 Motivation for
Data Structures Week #6 Special Trees Outline Adelson-Velskii-Landis (AVL) Trees Splay Trees B-Trees 21.Aralık.2010 Borahan Tümer, Ph.D. 2 AVL Trees 21.Aralık.2010 Borahan Tümer, Ph.D. 3 Motivation for
13.4 Deletion in red-black trees
 The operation of Deletion in a red-black tree is similar to the operation of Insertion on the tree. That is, apply the deletion algorithm for binary search trees to delete a node z; apply node color changes
The operation of Deletion in a red-black tree is similar to the operation of Insertion on the tree. That is, apply the deletion algorithm for binary search trees to delete a node z; apply node color changes
CS 310 B-trees, Page 1. Motives. Large-scale databases are stored in disks/hard drives.
 CS 310 B-trees, Page 1 Motives Large-scale databases are stored in disks/hard drives. Disks are quite different from main memory. Data in a disk are accessed through a read-write head. To read a piece
CS 310 B-trees, Page 1 Motives Large-scale databases are stored in disks/hard drives. Disks are quite different from main memory. Data in a disk are accessed through a read-write head. To read a piece
Laboratory Module X B TREES
 Purpose: Purpose 1... Purpose 2 Purpose 3. Laboratory Module X B TREES 1. Preparation Before Lab When working with large sets of data, it is often not possible or desirable to maintain the entire structure
Purpose: Purpose 1... Purpose 2 Purpose 3. Laboratory Module X B TREES 1. Preparation Before Lab When working with large sets of data, it is often not possible or desirable to maintain the entire structure
Efficient pebbling for list traversal synopses
 Efficient pebbling for list traversal synopses Yossi Matias Ely Porat Tel Aviv University Bar-Ilan University & Tel Aviv University Abstract 1 Introduction 1.1 Applications Consider a program P running
Efficient pebbling for list traversal synopses Yossi Matias Ely Porat Tel Aviv University Bar-Ilan University & Tel Aviv University Abstract 1 Introduction 1.1 Applications Consider a program P running
III Data Structures. Dynamic sets
 III Data Structures Elementary Data Structures Hash Tables Binary Search Trees Red-Black Trees Dynamic sets Sets are fundamental to computer science Algorithms may require several different types of operations
III Data Structures Elementary Data Structures Hash Tables Binary Search Trees Red-Black Trees Dynamic sets Sets are fundamental to computer science Algorithms may require several different types of operations
DDS Dynamic Search Trees
 DDS Dynamic Search Trees 1 Data structures l A data structure models some abstract object. It implements a number of operations on this object, which usually can be classified into l creation and deletion
DDS Dynamic Search Trees 1 Data structures l A data structure models some abstract object. It implements a number of operations on this object, which usually can be classified into l creation and deletion
15.4 Longest common subsequence
 15.4 Longest common subsequence Biological applications often need to compare the DNA of two (or more) different organisms A strand of DNA consists of a string of molecules called bases, where the possible
15.4 Longest common subsequence Biological applications often need to compare the DNA of two (or more) different organisms A strand of DNA consists of a string of molecules called bases, where the possible
(2,4) Trees Goodrich, Tamassia (2,4) Trees 1
 Trees Goodrich, Tamassia (2,4) Trees 1") (2,4) Trees 9 2 5 7 10 14 2004 Goodrich, Tamassia (2,4) Trees 1 Multi-Way Search Tree A multi-way search tree is an ordered tree such that Each internal node has at least two children and stores d -1 key-element
(2,4) Trees 9 2 5 7 10 14 2004 Goodrich, Tamassia (2,4) Trees 1 Multi-Way Search Tree A multi-way search tree is an ordered tree such that Each internal node has at least two children and stores d -1 key-element
Representations of Weighted Graphs (as Matrices) Algorithms and Data Structures: Minimum Spanning Trees. Weighted Graphs
 Algorithms and Data Structures: Minimum Spanning Trees. Weighted Graphs") Representations of Weighted Graphs (as Matrices) A B Algorithms and Data Structures: Minimum Spanning Trees 9.0 F 1.0 6.0 5.0 6.0 G 5.0 I H 3.0 1.0 C 5.0 E 1.0 D 28th Oct, 1st & 4th Nov, 2011 ADS: lects
Representations of Weighted Graphs (as Matrices) A B Algorithms and Data Structures: Minimum Spanning Trees 9.0 F 1.0 6.0 5.0 6.0 G 5.0 I H 3.0 1.0 C 5.0 E 1.0 D 28th Oct, 1st & 4th Nov, 2011 ADS: lects
CMPS 2200 Fall 2017 B-trees Carola Wenk
 CMPS 2200 Fall 2017 B-trees Carola Wenk 9/18/17 CMPS 2200 Intro. to Algorithms 1 External memory dictionary Task: Given a large amount of data that does not fit into main memory, process it into a dictionary
CMPS 2200 Fall 2017 B-trees Carola Wenk 9/18/17 CMPS 2200 Intro. to Algorithms 1 External memory dictionary Task: Given a large amount of data that does not fit into main memory, process it into a dictionary
Disk Accesses. CS 361, Lecture 25. B-Tree Properties. Outline
 Disk Accesses CS 361, Lecture 25 Jared Saia University of New Mexico Consider any search tree The number of disk accesses per search will dominate the run time Unless the entire tree is in memory, there
Disk Accesses CS 361, Lecture 25 Jared Saia University of New Mexico Consider any search tree The number of disk accesses per search will dominate the run time Unless the entire tree is in memory, there
TREES. Trees - Introduction
 TREES Chapter 6 Trees - Introduction All previous data organizations we've studied are linear each element can have only one predecessor and successor Accessing all elements in a linear sequence is O(n)
TREES Chapter 6 Trees - Introduction All previous data organizations we've studied are linear each element can have only one predecessor and successor Accessing all elements in a linear sequence is O(n)
Properties of red-black trees
 Red-Black Trees Introduction We have seen that a binary search tree is a useful tool. I.e., if its height is h, then we can implement any basic operation on it in O(h) units of time. The problem: given
Red-Black Trees Introduction We have seen that a binary search tree is a useful tool. I.e., if its height is h, then we can implement any basic operation on it in O(h) units of time. The problem: given
9/29/2016. Chapter 4 Trees. Introduction. Terminology. Terminology. Terminology. Terminology
 Introduction Chapter 4 Trees for large input, even linear access time may be prohibitive we need data structures that exhibit average running times closer to O(log N) binary search tree 2 Terminology recursive
Introduction Chapter 4 Trees for large input, even linear access time may be prohibitive we need data structures that exhibit average running times closer to O(log N) binary search tree 2 Terminology recursive
Algorithms. AVL Tree
 Algorithms AVL Tree Balanced binary tree The disadvantage of a binary search tree is that its height can be as large as N-1 This means that the time needed to perform insertion and deletion and many other
Algorithms AVL Tree Balanced binary tree The disadvantage of a binary search tree is that its height can be as large as N-1 This means that the time needed to perform insertion and deletion and many other
CS F-11 B-Trees 1
 CS673-2016F-11 B-Trees 1 11-0: Binary Search Trees Binary Tree data structure All values in left subtree< value stored in root All values in the right subtree>value stored in root 11-1: Generalizing BSTs
CS673-2016F-11 B-Trees 1 11-0: Binary Search Trees Binary Tree data structure All values in left subtree< value stored in root All values in the right subtree>value stored in root 11-1: Generalizing BSTs
l So unlike the search trees, there are neither arbitrary find operations nor arbitrary delete operations possible.
 DDS-Heaps 1 Heaps - basics l Heaps an abstract structure where each object has a key value (the priority), and the operations are: insert an object, find the object of minimum key (find min), and delete
DDS-Heaps 1 Heaps - basics l Heaps an abstract structure where each object has a key value (the priority), and the operations are: insert an object, find the object of minimum key (find min), and delete
Priority queue. Advanced Algorithmics (6EAP) MTAT Heaps. Binary heap. Heap/Priority queue. Binomial heaps:
 MTAT Heaps. Binary heap. Heap/Priority queue. Binomial heaps:") Priority queue Advanced Algorithmics (EAP) MTAT.03.38 Heaps Jaak Vilo 0 Fall Insert Q, x Retrieve x from Q s.t. x.value is min (or max) Sorted linked list: O(n) to insert x into right place O() access-min,
Priority queue Advanced Algorithmics (EAP) MTAT.03.38 Heaps Jaak Vilo 0 Fall Insert Q, x Retrieve x from Q s.t. x.value is min (or max) Sorted linked list: O(n) to insert x into right place O() access-min,
Data Structures Week #6. Special Trees
 Data Structures Week #6 Special Trees Outline Adelson-Velskii-Landis (AVL) Trees Splay Trees B-Trees October 5, 2015 Borahan Tümer, Ph.D. 2 AVL Trees October 5, 2015 Borahan Tümer, Ph.D. 3 Motivation for
Data Structures Week #6 Special Trees Outline Adelson-Velskii-Landis (AVL) Trees Splay Trees B-Trees October 5, 2015 Borahan Tümer, Ph.D. 2 AVL Trees October 5, 2015 Borahan Tümer, Ph.D. 3 Motivation for
Quiz 1 Solutions. (a) f(n) = n g(n) = log n Circle all that apply: f = O(g) f = Θ(g) f = Ω(g)
 f(n) = n g(n) = log n Circle all that apply: f = O(g) f = Θ(g) f = Ω(g)") Introduction to Algorithms March 11, 2009 Massachusetts Institute of Technology 6.006 Spring 2009 Professors Sivan Toledo and Alan Edelman Quiz 1 Solutions Problem 1. Quiz 1 Solutions Asymptotic orders
Introduction to Algorithms March 11, 2009 Massachusetts Institute of Technology 6.006 Spring 2009 Professors Sivan Toledo and Alan Edelman Quiz 1 Solutions Problem 1. Quiz 1 Solutions Asymptotic orders
Multiway searching. In the worst case of searching a complete binary search tree, we can make log(n) page faults Everyone knows what a page fault is?
 page faults Everyone knows what a page fault is?") Multiway searching What do we do if the volume of data to be searched is too large to fit into main memory Search tree is stored on disk pages, and the pages required as comparisons proceed may not be
Multiway searching What do we do if the volume of data to be searched is too large to fit into main memory Search tree is stored on disk pages, and the pages required as comparisons proceed may not be
Introduction. for large input, even access time may be prohibitive we need data structures that exhibit times closer to O(log N) binary search tree
 binary search tree") Chapter 4 Trees 2 Introduction for large input, even access time may be prohibitive we need data structures that exhibit running times closer to O(log N) binary search tree 3 Terminology recursive definition
Chapter 4 Trees 2 Introduction for large input, even access time may be prohibitive we need data structures that exhibit running times closer to O(log N) binary search tree 3 Terminology recursive definition
Binary Heaps in Dynamic Arrays
 Yufei Tao ITEE University of Queensland We have already learned that the binary heap serves as an efficient implementation of a priority queue. Our previous discussion was based on pointers (for getting
Yufei Tao ITEE University of Queensland We have already learned that the binary heap serves as an efficient implementation of a priority queue. Our previous discussion was based on pointers (for getting
Rank-Pairing Heaps. Bernard Haeupler Siddhartha Sen Robert E. Tarjan. SIAM JOURNAL ON COMPUTING Vol. 40, No. 6 (2011), pp.
, pp.") Rank-Pairing Heaps Bernard Haeupler Siddhartha Sen Robert E. Tarjan Presentation by Alexander Pokluda Cheriton School of Computer Science, University of Waterloo, Canada SIAM JOURNAL ON COMPUTING Vol.
Rank-Pairing Heaps Bernard Haeupler Siddhartha Sen Robert E. Tarjan Presentation by Alexander Pokluda Cheriton School of Computer Science, University of Waterloo, Canada SIAM JOURNAL ON COMPUTING Vol.
13.4 Deletion in red-black trees
 Deletion in a red-black tree is similar to insertion. Apply the deletion algorithm for binary search trees. Apply node color changes and left/right rotations to fix the violations of RBT tree properties.
Deletion in a red-black tree is similar to insertion. Apply the deletion algorithm for binary search trees. Apply node color changes and left/right rotations to fix the violations of RBT tree properties.
Advanced Algorithms and Data Structures
 Advanced Algorithms and Data Structures Prof. Tapio Elomaa tapio.elomaa@tut.fi Course Prerequisites A seven credit unit course Replaced OHJ-2156 Analysis of Algorithms We take things a bit further than
Advanced Algorithms and Data Structures Prof. Tapio Elomaa tapio.elomaa@tut.fi Course Prerequisites A seven credit unit course Replaced OHJ-2156 Analysis of Algorithms We take things a bit further than
Uses for Trees About Trees Binary Trees. Trees. Seth Long. January 31, 2010
 Uses for About Binary January 31, 2010 Uses for About Binary Uses for Uses for About Basic Idea Implementing Binary Example: Expression Binary Search Uses for Uses for About Binary Uses for Storage Binary
Uses for About Binary January 31, 2010 Uses for About Binary Uses for Uses for About Basic Idea Implementing Binary Example: Expression Binary Search Uses for Uses for About Binary Uses for Storage Binary
Sorted Arrays. Operation Access Search Selection Predecessor Successor Output (print) Insert Delete Extract-Min
 Insert Delete Extract-Min") Binary Search Trees FRIDAY ALGORITHMS Sorted Arrays Operation Access Search Selection Predecessor Successor Output (print) Insert Delete Extract-Min 6 10 11 17 2 0 6 Running Time O(1) O(lg n) O(1) O(1)
Binary Search Trees FRIDAY ALGORITHMS Sorted Arrays Operation Access Search Selection Predecessor Successor Output (print) Insert Delete Extract-Min 6 10 11 17 2 0 6 Running Time O(1) O(lg n) O(1) O(1)
CS711008Z Algorithm Design and Analysis
 CS711008Z Algorithm Design and Analysis Lecture 7. Binary heap, binomial heap, and Fibonacci heap Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / 108 Outline
CS711008Z Algorithm Design and Analysis Lecture 7. Binary heap, binomial heap, and Fibonacci heap Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / 108 Outline
Chapter 12: Indexing and Hashing. Basic Concepts
 Chapter 12: Indexing and Hashing! Basic Concepts! Ordered Indices! B+-Tree Index Files! B-Tree Index Files! Static Hashing! Dynamic Hashing! Comparison of Ordered Indexing and Hashing! Index Definition
Chapter 12: Indexing and Hashing! Basic Concepts! Ordered Indices! B+-Tree Index Files! B-Tree Index Files! Static Hashing! Dynamic Hashing! Comparison of Ordered Indexing and Hashing! Index Definition
CS102 Binary Search Trees
 CS102 Binary Search Trees Prof Tejada 1 To speed up insertion, removal and search, modify the idea of a Binary Tree to create a Binary Search Tree (BST) Binary Search Trees Binary Search Trees have one
CS102 Binary Search Trees Prof Tejada 1 To speed up insertion, removal and search, modify the idea of a Binary Tree to create a Binary Search Tree (BST) Binary Search Trees Binary Search Trees have one
Text Compression through Huffman Coding. Terminology
 Text Compression through Huffman Coding Huffman codes represent a very effective technique for compressing data; they usually produce savings between 20% 90% Preliminary example We are given a 100,000-character
Text Compression through Huffman Coding Huffman codes represent a very effective technique for compressing data; they usually produce savings between 20% 90% Preliminary example We are given a 100,000-character
Part 2: Balanced Trees
 Part 2: Balanced Trees 1 AVL Trees We could dene a perfectly balanced binary search tree with N nodes to be a complete binary search tree, one in which every level except the last is completely full. A
Part 2: Balanced Trees 1 AVL Trees We could dene a perfectly balanced binary search tree with N nodes to be a complete binary search tree, one in which every level except the last is completely full. A
CS521 \ Notes for the Final Exam
 CS521 \ Notes for final exam 1 Ariel Stolerman Asymptotic Notations: CS521 \ Notes for the Final Exam Notation Definition Limit Big-O ( ) Small-o ( ) Big- ( ) Small- ( ) Big- ( ) Notes: ( ) ( ) ( ) ( )
CS521 \ Notes for final exam 1 Ariel Stolerman Asymptotic Notations: CS521 \ Notes for the Final Exam Notation Definition Limit Big-O ( ) Small-o ( ) Big- ( ) Small- ( ) Big- ( ) Notes: ( ) ( ) ( ) ( )
Chapter 12: Indexing and Hashing
 Chapter 12: Indexing and Hashing Basic Concepts Ordered Indices B+-Tree Index Files B-Tree Index Files Static Hashing Dynamic Hashing Comparison of Ordered Indexing and Hashing Index Definition in SQL
Chapter 12: Indexing and Hashing Basic Concepts Ordered Indices B+-Tree Index Files B-Tree Index Files Static Hashing Dynamic Hashing Comparison of Ordered Indexing and Hashing Index Definition in SQL
B-trees. It also makes sense to have data structures that use the minimum addressable unit as their base node size.
 B-trees Balanced BSTs such as RBTs are great for data structures that can fit into the main memory of the computer. But what happens when we need to use external storage? Here are some approximate speeds
B-trees Balanced BSTs such as RBTs are great for data structures that can fit into the main memory of the computer. But what happens when we need to use external storage? Here are some approximate speeds
Binary heaps (chapters ) Leftist heaps
 Leftist heaps") Binary heaps (chapters 20.3 20.5) Leftist heaps Binary heaps are arrays! A binary heap is really implemented using an array! 8 18 29 20 28 39 66 Possible because of completeness property 37 26 76 32 74
Binary heaps (chapters 20.3 20.5) Leftist heaps Binary heaps are arrays! A binary heap is really implemented using an array! 8 18 29 20 28 39 66 Possible because of completeness property 37 26 76 32 74
Lecture 6: Analysis of Algorithms (CS )
") Lecture 6: Analysis of Algorithms (CS583-002) Amarda Shehu October 08, 2014 1 Outline of Today s Class 2 Traversals Querying Insertion and Deletion Sorting with BSTs 3 Red-black Trees Height of a Red-black
Lecture 6: Analysis of Algorithms (CS583-002) Amarda Shehu October 08, 2014 1 Outline of Today s Class 2 Traversals Querying Insertion and Deletion Sorting with BSTs 3 Red-black Trees Height of a Red-black
CSCI2100B Data Structures Trees
 CSCI2100B Data Structures Trees Irwin King king@cse.cuhk.edu.hk http://www.cse.cuhk.edu.hk/~king Department of Computer Science & Engineering The Chinese University of Hong Kong Introduction General Tree
CSCI2100B Data Structures Trees Irwin King king@cse.cuhk.edu.hk http://www.cse.cuhk.edu.hk/~king Department of Computer Science & Engineering The Chinese University of Hong Kong Introduction General Tree
D. Θ nlogn ( ) D. Ο. ). Which of the following is not necessarily true? . Which of the following cannot be shown as an improvement? D.
 D. Ο. ). Which of the following is not necessarily true? . Which of the following cannot be shown as an improvement? D.") CSE 0 Name Test Fall 00 Last Digits of Mav ID # Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to convert an array, with priorities stored at subscripts through n,
CSE 0 Name Test Fall 00 Last Digits of Mav ID # Multiple Choice. Write your answer to the LEFT of each problem. points each. The time to convert an array, with priorities stored at subscripts through n,
COMP Analysis of Algorithms & Data Structures
 COMP 3170 - Analysis of Algorithms & Data Structures Shahin Kamali Lecture 9 - Jan. 22, 2018 CLRS 12.2, 12.3, 13.2, read problem 13-3 University of Manitoba COMP 3170 - Analysis of Algorithms & Data Structures
COMP 3170 - Analysis of Algorithms & Data Structures Shahin Kamali Lecture 9 - Jan. 22, 2018 CLRS 12.2, 12.3, 13.2, read problem 13-3 University of Manitoba COMP 3170 - Analysis of Algorithms & Data Structures
Data Structures Week #6. Special Trees
 Data Structures Week #6 Special Trees Outline Adelson-Velskii-Landis (AVL) Trees Splay Trees B-Trees October 5, 2018 Borahan Tümer, Ph.D. 2 AVL Trees October 5, 2018 Borahan Tümer, Ph.D. 3 Motivation for
Data Structures Week #6 Special Trees Outline Adelson-Velskii-Landis (AVL) Trees Splay Trees B-Trees October 5, 2018 Borahan Tümer, Ph.D. 2 AVL Trees October 5, 2018 Borahan Tümer, Ph.D. 3 Motivation for
HEAPS: IMPLEMENTING EFFICIENT PRIORITY QUEUES
 HEAPS: IMPLEMENTING EFFICIENT PRIORITY QUEUES 2 5 6 9 7 Presentation for use with the textbook Data Structures and Algorithms in Java, 6 th edition, by M. T. Goodrich, R. Tamassia, and M. H., Wiley, 2014
HEAPS: IMPLEMENTING EFFICIENT PRIORITY QUEUES 2 5 6 9 7 Presentation for use with the textbook Data Structures and Algorithms in Java, 6 th edition, by M. T. Goodrich, R. Tamassia, and M. H., Wiley, 2014
Topic: Heaps and priority queues
 David Keil Data Structures 8/05 1 Topic: Heaps and priority queues The priority-queue problem The heap solution Binary trees and complete binary trees Running time of heap operations Array implementation
David Keil Data Structures 8/05 1 Topic: Heaps and priority queues The priority-queue problem The heap solution Binary trees and complete binary trees Running time of heap operations Array implementation
arxiv: v2 [cs.ds] 9 Apr 2009
![arxiv: v2 [cs.ds] 9 Apr 2009](/thumbs/72/66843812.jpg "arxiv: v2 [cs.ds] 9 Apr 2009") Pairing Heaps with Costless Meld arxiv:09034130v2 [csds] 9 Apr 2009 Amr Elmasry Max-Planck Institut für Informatik Saarbrücken, Germany elmasry@mpi-infmpgde Abstract Improving the structure and analysis
Pairing Heaps with Costless Meld arxiv:09034130v2 [csds] 9 Apr 2009 Amr Elmasry Max-Planck Institut für Informatik Saarbrücken, Germany elmasry@mpi-infmpgde Abstract Improving the structure and analysis
CS711008Z Algorithm Design and Analysis
 CS700Z Algorithm Design and Analysis Lecture 7 Binary heap, binomial heap, and Fibonacci heap Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / Outline Introduction
CS700Z Algorithm Design and Analysis Lecture 7 Binary heap, binomial heap, and Fibonacci heap Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / Outline Introduction
RANK-PAIRING HEAPS BERNHARD HAEUPLER 1, SIDDHARTHA SEN 2,4, AND ROBERT E. TARJAN 3,4
 RANK-PAIRING HEAPS BERNHARD HAEUPLER 1, SIDDHARTHA SEN 2,4, AND ROBERT E. TARJAN 3,4 Abstract. We introduce the rank-pairing heap, an implementation of heaps that combines the asymptotic efficiency of
RANK-PAIRING HEAPS BERNHARD HAEUPLER 1, SIDDHARTHA SEN 2,4, AND ROBERT E. TARJAN 3,4 Abstract. We introduce the rank-pairing heap, an implementation of heaps that combines the asymptotic efficiency of
B-Trees and External Memory
 Presentation for use with the textbook, Algorithm Design and Applications, by M. T. Goodrich and R. Tamassia, Wiley, 2015 and External Memory 1 1 (2, 4) Trees: Generalization of BSTs Each internal node
Presentation for use with the textbook, Algorithm Design and Applications, by M. T. Goodrich and R. Tamassia, Wiley, 2015 and External Memory 1 1 (2, 4) Trees: Generalization of BSTs Each internal node
How many leaves on the decision tree? There are n! leaves, because every permutation appears at least once.
 Chapter 8. Sorting in Linear Time Types of Sort Algorithms The only operation that may be used to gain order information about a sequence is comparison of pairs of elements. Quick Sort -- comparison-based
Chapter 8. Sorting in Linear Time Types of Sort Algorithms The only operation that may be used to gain order information about a sequence is comparison of pairs of elements. Quick Sort -- comparison-based
CSE 214 Computer Science II Introduction to Tree
 CSE 214 Computer Science II Introduction to Tree Fall 2017 Stony Brook University Instructor: Shebuti Rayana shebuti.rayana@stonybrook.edu http://www3.cs.stonybrook.edu/~cse214/sec02/ Tree Tree is a non-linear
CSE 214 Computer Science II Introduction to Tree Fall 2017 Stony Brook University Instructor: Shebuti Rayana shebuti.rayana@stonybrook.edu http://www3.cs.stonybrook.edu/~cse214/sec02/ Tree Tree is a non-linear
COMP Analysis of Algorithms & Data Structures
 COMP 3170 - Analysis of Algorithms & Data Structures Shahin Kamali Lecture 9 - Jan. 22, 2018 CLRS 12.2, 12.3, 13.2, read problem 13-3 University of Manitoba 1 / 12 Binary Search Trees (review) Structure
COMP 3170 - Analysis of Algorithms & Data Structures Shahin Kamali Lecture 9 - Jan. 22, 2018 CLRS 12.2, 12.3, 13.2, read problem 13-3 University of Manitoba 1 / 12 Binary Search Trees (review) Structure
Data Structures and Algorithms (DSA) Course 9 Lists / Graphs / Trees. Iulian Năstac
 Course 9 Lists / Graphs / Trees. Iulian Năstac") Data Structures and Algorithms (DSA) Course 9 Lists / Graphs / Trees Iulian Năstac Recapitulation It is considered the following type: typedef struct nod { ; struct nod *next; } NOD; 2 Circular
Data Structures and Algorithms (DSA) Course 9 Lists / Graphs / Trees Iulian Năstac Recapitulation It is considered the following type: typedef struct nod { ; struct nod *next; } NOD; 2 Circular
Search Trees - 1 Venkatanatha Sarma Y
 Search Trees - 1 Lecture delivered by: Venkatanatha Sarma Y Assistant Professor MSRSAS-Bangalore 11 Objectives To introduce, discuss and analyse the different ways to realise balanced Binary Search Trees
Search Trees - 1 Lecture delivered by: Venkatanatha Sarma Y Assistant Professor MSRSAS-Bangalore 11 Objectives To introduce, discuss and analyse the different ways to realise balanced Binary Search Trees
We augment RBTs to support operations on dynamic sets of intervals A closed interval is an ordered pair of real
 14.3 Interval trees We augment RBTs to support operations on dynamic sets of intervals A closed interval is an ordered pair of real numbers ], with Interval ]represents the set Open and half-open intervals
14.3 Interval trees We augment RBTs to support operations on dynamic sets of intervals A closed interval is an ordered pair of real numbers ], with Interval ]represents the set Open and half-open intervals
INF2220: algorithms and data structures Series 1
 Universitetet i Oslo Institutt for Informatikk A. Maus, R.K. Runde, I. Yu INF2220: algorithms and data structures Series 1 Topic Trees & estimation of running time (Exercises with hints for solution) Issued:
Universitetet i Oslo Institutt for Informatikk A. Maus, R.K. Runde, I. Yu INF2220: algorithms and data structures Series 1 Topic Trees & estimation of running time (Exercises with hints for solution) Issued:
Notes on Minimum Spanning Trees. Red Rule: Given a cycle containing no red edges, select a maximum uncolored edge on the cycle, and color it red.
 COS 521 Fall 2009 Notes on Minimum Spanning Trees 1. The Generic Greedy Algorithm The generic greedy algorithm finds a minimum spanning tree (MST) by an edge-coloring process. Initially all edges are uncolored.
COS 521 Fall 2009 Notes on Minimum Spanning Trees 1. The Generic Greedy Algorithm The generic greedy algorithm finds a minimum spanning tree (MST) by an edge-coloring process. Initially all edges are uncolored.
Organizing Spatial Data
 Organizing Spatial Data Spatial data records include a sense of location as an attribute. Typically location is represented by coordinate data (in 2D or 3D). 1 If we are to search spatial data using the
Organizing Spatial Data Spatial data records include a sense of location as an attribute. Typically location is represented by coordinate data (in 2D or 3D). 1 If we are to search spatial data using the
Binary Search Trees. Analysis of Algorithms
 Binary Search Trees Analysis of Algorithms Binary Search Trees A BST is a binary tree in symmetric order 31 Each node has a key and every node s key is: 19 23 25 35 38 40 larger than all keys in its left
Binary Search Trees Analysis of Algorithms Binary Search Trees A BST is a binary tree in symmetric order 31 Each node has a key and every node s key is: 19 23 25 35 38 40 larger than all keys in its left
B-Trees and External Memory
 Presentation for use with the textbook, Algorithm Design and Applications, by M. T. Goodrich and R. Tamassia, Wiley, 2015 B-Trees and External Memory 1 (2, 4) Trees: Generalization of BSTs Each internal
Presentation for use with the textbook, Algorithm Design and Applications, by M. T. Goodrich and R. Tamassia, Wiley, 2015 B-Trees and External Memory 1 (2, 4) Trees: Generalization of BSTs Each internal
Priority Queues. INFO0902 Data Structures and Algorithms. Priority Queues (files à priorités) Keys. Priority Queues
 Keys. Priority Queues") Priority Queues INFO0902 Data Structures and Algorithms Priority Queues Justus H. Piater Priority Queues (files à priorités) Keys Extract the top-priority element at any time. No notion of order, positions,
Priority Queues INFO0902 Data Structures and Algorithms Priority Queues Justus H. Piater Priority Queues (files à priorités) Keys Extract the top-priority element at any time. No notion of order, positions,
B-Trees. Disk Storage. What is a multiway tree? What is a B-tree? Why B-trees? Insertion in a B-tree. Deletion in a B-tree
 B-Trees Disk Storage What is a multiway tree? What is a B-tree? Why B-trees? Insertion in a B-tree Deletion in a B-tree Disk Storage Data is stored on disk (i.e., secondary memory) in blocks. A block is
B-Trees Disk Storage What is a multiway tree? What is a B-tree? Why B-trees? Insertion in a B-tree Deletion in a B-tree Disk Storage Data is stored on disk (i.e., secondary memory) in blocks. A block is
Priority Queues. 1 Introduction. 2 Naïve Implementations. CSci 335 Software Design and Analysis III Chapter 6 Priority Queues. Prof.
 Priority Queues 1 Introduction Many applications require a special type of queuing in which items are pushed onto the queue by order of arrival, but removed from the queue based on some other priority
Priority Queues 1 Introduction Many applications require a special type of queuing in which items are pushed onto the queue by order of arrival, but removed from the queue based on some other priority
8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))
![8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))](/thumbs/89/97773603.jpg "8. Write an example for expression tree. [A/M 10] (A+B)*((C-D)/(E^F))") DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING EC6301 OBJECT ORIENTED PROGRAMMING AND DATA STRUCTURES UNIT IV NONLINEAR DATA STRUCTURES Part A 1. Define Tree [N/D 08]
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING EC6301 OBJECT ORIENTED PROGRAMMING AND DATA STRUCTURES UNIT IV NONLINEAR DATA STRUCTURES Part A 1. Define Tree [N/D 08]
An AVL tree with N nodes is an excellent data. The Big-Oh analysis shows that most operations finish within O(log N) time
 time") B + -TREES MOTIVATION An AVL tree with N nodes is an excellent data structure for searching, indexing, etc. The Big-Oh analysis shows that most operations finish within O(log N) time The theoretical conclusion
B + -TREES MOTIVATION An AVL tree with N nodes is an excellent data structure for searching, indexing, etc. The Big-Oh analysis shows that most operations finish within O(log N) time The theoretical conclusion