Quick Introduction to ROS
|
|
|
- Lenard Austin
- 5 years ago
- Views:
Transcription
1 Quick Introduction to ROS
2 ROS is huge ROS is an open-source, meta-operating system for humanoid robots
3 What can ROS do? Hardware abstraction Low-level device control Message passing between nodes Sophisticated build environment Libraries Debugging and Visualization Tools
4 What are the major concepts? ROS packages ROS messages ROS nodes ROS services ROS action servers ROS topics...and many more!
5 1 Installing Ubuntu Quick and painless with Virtualbox

6 Open Virtualbox Install Virtualbox Download Ubuntu Install to a USB drive
7 Time for a demo! Let s install Ubuntu on a USB drive. I ve uploaded a video of this to Youtube here:
8 2 What is ROS? Getting started with the concepts
9 What can ROS do? Research development Fast prototyping easier in a simulated world Transferring from simulated robot to real robot takes a bit of effort
10 3 ROS Concepts Like HTTP but with extra steps
11 ROS Nodes The ROS framework is a graph Each component is called a node A node is a process Nodes communicate through topics, services, and actions
12 ROS as a framework ROS Master sends/receives Several nodes at once Whole network on your computer

13 ROS as a framework cont. Kinect2 /kinect2/images Publishes image messages What are messages?
14
15 So what does this mean? Hardware talks to drivers, which then talk to nodes, which then talks to ROS Nodes can run any software you want as long as it is a language ROS supports
16 Topics Each node can listen on or publish messages to topics Built in message types (std_msgs) User defined messages Complex.msg float32 real float32 imaginary
17 All ROS messages are viewable
18 Services A node can provide services synchronous remote procedure calls Request Response Add.srv #Example Service float32 x float32 y --#Three dashes separate the request and response Float32 result

19 Can view all ROS services
20 Actions (actionlib) Actions (asynchronous) are for long-running processes. They have a Goal, Result, and Feedback Navigation.action float32 dest_x float32 dest_y --boolean success --uint32 percent_complete #Example Action # Result # Feedback

21 Can view all ROS actions
22 Packages ROS software is organized into packages Each package contains some combination of code, data, and documentation package_name/ package.xml describes the package and its dependencies CMakeLists.txt Finds other required packages and messages/services/actions src/ C++ source code for your node (includes go in include/ folder) scripts/ Python scripts for your node msg/ ROS messages defined for your node (for topics) srv/ ROS services defined for your node (for services) launch/ The folder that contains.launch files for this package
23 Building/Running Catkin is the official build system of ROS Catkin combines Cmake macros and Python scripts to provide some functionality on top of Cmake s normal workflow Run ROS code

24 Launch Files Automate the launching of collections of ROS nodes via XML files and roslaunch

25 Launch Files You can also pass parameters via launch files

26 Command Line Tools
27 Robots + ROS Sensor Data Joint Trajectories Your ROS Code Here
28 Robots available - Fetch Provides Data From (sensors): - Depth camera - Laser scanner - Head camera - Current Joint States
: - Kinect - Two Laser Scanners -")
 -")
29 Robots available - PR2 Provides Data From (sensors): - Kinect - Two Laser Scanners - Multiple Cameras (head and hand cameras) - Fingertip pressure sensor arrays (gripper) - Current Joint States


30 Robots available - Baxter More cost-effective Also has 2 arms Stationary base Sensors: Sonar Hand and head cameras Hand rangefinders
31 Robots in the wild - Problems I don t have a Robot in front of me I want to try something that may break my Robot Setting up the Robot takes too much time, I want to test changes to my code quickly

32 Gazebo Simulator
33 Gazebo Simulator Same interface as real Fetch, PR2 or Baxter Add/remove items in environment Physics engine to simulate effects of motor commands and provide updated sensor feedback
34 Gazebo Simulator The organization that makes the robot often provides a Gazebo setup package for that robot. For example:
35 Gazebo Simulator Demo roslaunch fetch_gazebo playground.launch rosrun applications keyboard_teleop.py rostopic list grep gazebo
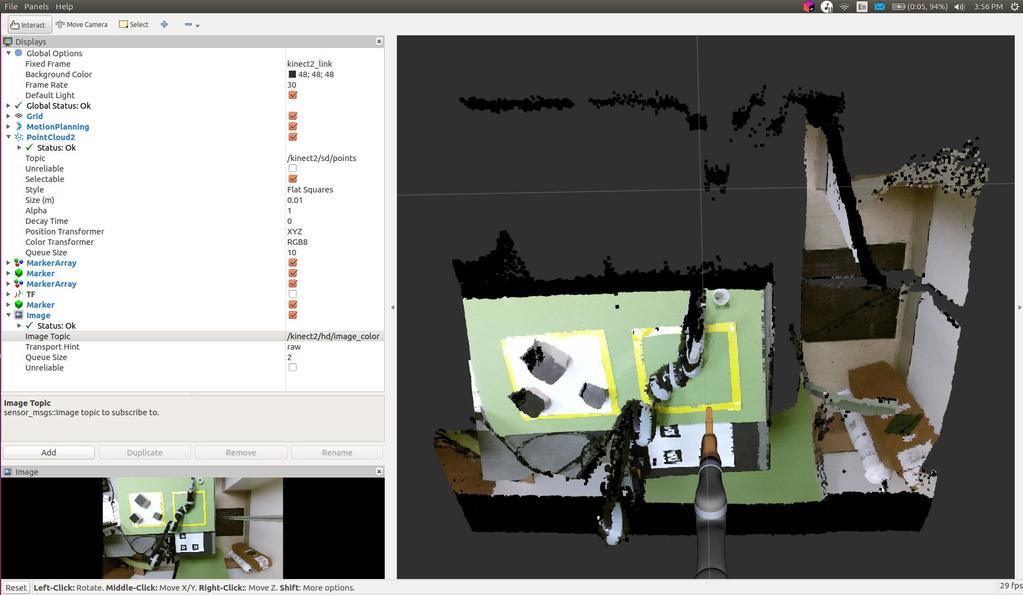
36 Rviz: Robot Visualization

37 Moving the robot - TF A robotic system typically has many 3D coordinate frames that change over time. tf keeps track of all these frames over time.
38 RViz and tf Demo rosrun rviz rviz
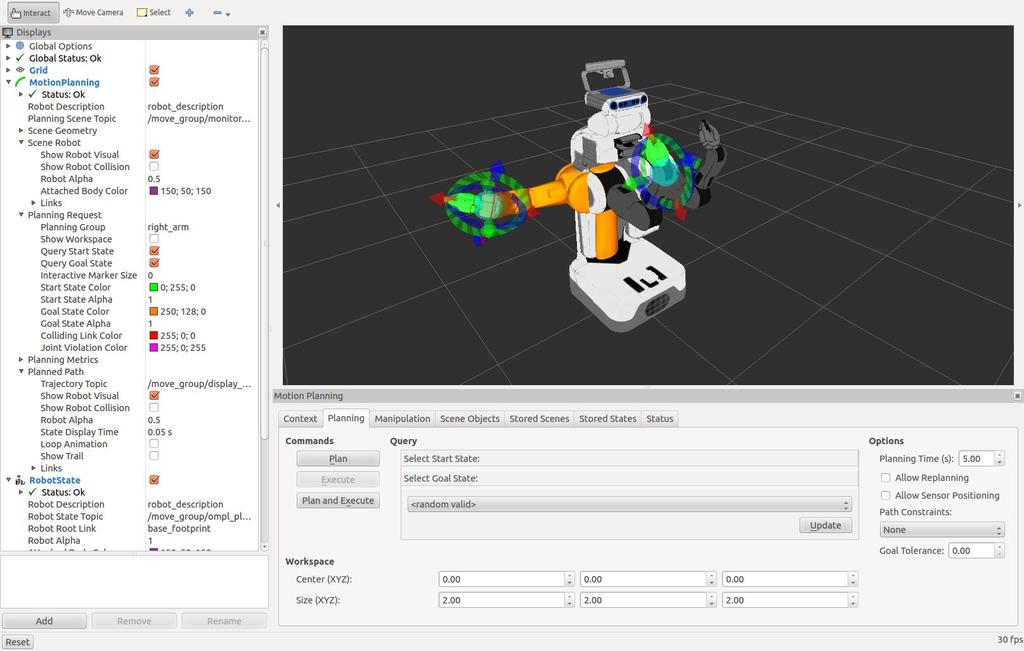
39 Moveit!
40 Moveit! Given: Current State of Arm Desired End Effector Pose Scene Returns: Trajectory to Move End Effector to Desired Pose
41 Moveit! Provides a common interface to several different planners Probabilistic Planners: will not return the same path every time and may not even find a path reliably.
42 MoveIt! config The organization that makes the robot often provides a MoveIt! config package. These will provide information about robot joints, links, control information. For example: 1. joints of each group 2. end-effector of each group 3. joint limits 4. default planners For example:
43 Moveit! demo roslaunch fetch_moveit_config move_group.launch
44 MoveIt! Python interfaces moveit_commander ommander/html/index.html moveit_python eit_python

45 Graspit! Grasp planner Lots of robots and objects
46 Graspit! demo roslaunch graspit_interface graspit_interface.launch Python interface: graspit_commander der
47 Graspit! demo import graspit_commander gc = graspit_commander.graspitcommander() gc.clearworld() gc.importrobot('fetch_gripper') gc.importgraspablebody("longbox") grasps = gc.plangrasps() grasps = grasps.grasps
48 If you have a question Look in Tutorials: Reference class slides/codes provided Google it Ask a TA
49 Some project tips Get going early. Start from a simple prototype. Seek help. Several robot platforms available (Fetch, PR2, and Baxter)
50 Homework are out! Homework deadline: Feb. 26 Start early, last part is a little bit annoying Paper choice deadline: Feb. 5 Walk-through
Introduction to Robot Operating System (ROS)
") Introduction to Robot Operating System (ROS) May 22, 2018 Outline What is ROS? ROS Communication Layer ROS Ecosystem ROS Master ROS Nodes Topics, Services, Actions ROS Packages Catkin build system Libraries/Tools
Introduction to Robot Operating System (ROS) May 22, 2018 Outline What is ROS? ROS Communication Layer ROS Ecosystem ROS Master ROS Nodes Topics, Services, Actions ROS Packages Catkin build system Libraries/Tools
EECS 4330/7330 Introduction to Mechatronics and Robotic Vision, Fall Lab 5. Controlling Puma Using Leap Motion Device
 1 Lab 5 Controlling Puma Using Leap Motion Device Objective In this experiment, students will use Leap Motion device to achieve the following goals: - Get familiar with the Leap Motion device - Experience
1 Lab 5 Controlling Puma Using Leap Motion Device Objective In this experiment, students will use Leap Motion device to achieve the following goals: - Get familiar with the Leap Motion device - Experience
CS 309: Autonomous Intelligent Robotics FRI I. Lecture 9: Introduction to ROS. Instructor: Justin Hart
 CS 309: Autonomous Intelligent Robotics FRI I Lecture 9: Introduction to ROS Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 1: Due tonight Any
CS 309: Autonomous Intelligent Robotics FRI I Lecture 9: Introduction to ROS Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 1: Due tonight Any
ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1. Guillermo Castillo (Wei Zhang)
") ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1 Guillermo Castillo (Wei Zhang) Department of Electrical and Computer Engineering Ohio State University 01/2018 Previous Steps Outline Previous
ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1 Guillermo Castillo (Wei Zhang) Department of Electrical and Computer Engineering Ohio State University 01/2018 Previous Steps Outline Previous
Overview KMR WS2012/13. ROS Basics. Robot Operating System (ROS) Practical Introduction. Johannes Maurer Clemens Mühlbacher. Master.
 Practical Introduction. Johannes Maurer Clemens Mühlbacher. Master.") KMR WS2012/13 Practical Introduction Overview Johannes Maurer Clemens Mühlbacher Graz University of Technology Graz, October 12th, 2012 1 2 Robot Operating System (ROS) open-source meta-operating system
KMR WS2012/13 Practical Introduction Overview Johannes Maurer Clemens Mühlbacher Graz University of Technology Graz, October 12th, 2012 1 2 Robot Operating System (ROS) open-source meta-operating system
Course Updates. Website set-up at
 Course Updates Website set-up at https://ae640a.github.io/ Canvas invite (for assignments & submissions) will be sent once course list (after add-drop) is available Attendance: 70% Minimum Last 2 lectures
Course Updates Website set-up at https://ae640a.github.io/ Canvas invite (for assignments & submissions) will be sent once course list (after add-drop) is available Attendance: 70% Minimum Last 2 lectures
Preface...vii. Printed vs PDF Versions of the Book...ix. 1. Scope of this Volume Installing the ros-by-example Code...3
 Contents Preface...vii Printed vs PDF Versions of the Book...ix 1. Scope of this Volume...1 2. Installing the ros-by-example Code...3 3. Task Execution using ROS...7 3.1 A Fake Battery Simulator...8 3.2
Contents Preface...vii Printed vs PDF Versions of the Book...ix 1. Scope of this Volume...1 2. Installing the ros-by-example Code...3 3. Task Execution using ROS...7 3.1 A Fake Battery Simulator...8 3.2
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 1 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 20.02.2017 1 Overview Course 1 ROS architecture & philosophy
Programming for Robotics Introduction to ROS Course 1 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 20.02.2017 1 Overview Course 1 ROS architecture & philosophy
Introduction to ROS. COMP3431 Robot Software Architectures
 Introduction to ROS COMP3431 Robot Software Architectures Robot Software Architecture A robot s software has to control a lot of things: 2D/3D Cameras, LIDAR, Microphones, etc Drive motors, Arm motors
Introduction to ROS COMP3431 Robot Software Architectures Robot Software Architecture A robot s software has to control a lot of things: 2D/3D Cameras, LIDAR, Microphones, etc Drive motors, Arm motors
ROS tf System February, Janyl Jumadinova
 ROS tf System 13-15 February, 2017 Janyl Jumadinova What is tf? A robotic system typically has many coordinate frames that change over time, such as a world frame, base frame, gripper frame, head frame,
ROS tf System 13-15 February, 2017 Janyl Jumadinova What is tf? A robotic system typically has many coordinate frames that change over time, such as a world frame, base frame, gripper frame, head frame,
Introduction to ROS. Lasse Einig, Dennis Krupke, Florens Wasserfall
 Introduction to ROS Lasse Einig, Dennis Krupke, Florens Wasserfall University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems April 6, 2015 L.
Introduction to ROS Lasse Einig, Dennis Krupke, Florens Wasserfall University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems April 6, 2015 L.
3 Problems You Need to Tackle when Developing Robot Software
 ROS : Robot Operating System RSS Technical Lecture 6 Monday, February 27 th, 2012 Michael Fleder MIT 6-3, MEng, PhD 1 3 Problems You Need to Tackle when Developing Robot Software (1) Sequential programming
ROS : Robot Operating System RSS Technical Lecture 6 Monday, February 27 th, 2012 Michael Fleder MIT 6-3, MEng, PhD 1 3 Problems You Need to Tackle when Developing Robot Software (1) Sequential programming
Final Report. Project #19 Service robot simulation: Care-O-bot 4
 Aalto University ELEC-E8002/E8003 Project work course Year 2016 Final Report Project #19 Service robot simulation: Care-O-bot 4 Date: 12.12.2016 Taneli Halme Kimmo Ojala Otto Sirola Jason Toivanen Noora
Aalto University ELEC-E8002/E8003 Project work course Year 2016 Final Report Project #19 Service robot simulation: Care-O-bot 4 Date: 12.12.2016 Taneli Halme Kimmo Ojala Otto Sirola Jason Toivanen Noora
Introducing MoveIt! First, start the Baxter simulator in Gazebo:
 Introducing MoveIt! One of the challenging aspects of robotics is defining a path for the motion of a robot's arms to grasp an object, especially when obstacles may obstruct the most obvious path of motion.
Introducing MoveIt! One of the challenging aspects of robotics is defining a path for the motion of a robot's arms to grasp an object, especially when obstacles may obstruct the most obvious path of motion.
Robot Programming with Lisp
 7. Coordinate Transformations, TF, ActionLib Institute for Artificial University of Bremen Outline Coordinate Transformations TF ActionLib 2 Outline Coordinate Transformations TF ActionLib 3 Poses in 3D
7. Coordinate Transformations, TF, ActionLib Institute for Artificial University of Bremen Outline Coordinate Transformations TF ActionLib 2 Outline Coordinate Transformations TF ActionLib 3 Poses in 3D
Introduction to ROS Adopted from MIT 4.151
 Introduction to ROS Adopted from MIT 4.151 A meta-operating system for robots Comparison: the PC ecosystem Comparison: the robotics ecosystem Standardized layers System software abstracts hardware Applications
Introduction to ROS Adopted from MIT 4.151 A meta-operating system for robots Comparison: the PC ecosystem Comparison: the robotics ecosystem Standardized layers System software abstracts hardware Applications
COMP3431 Robot Software Architectures
 COMP3431 Robot Software Architectures Week 2 ROS Continued David Rajaratnam Click to edit Present s Name ROS Continued What we're doing today: Recap from last week Example of turtlebot setup Frames of
COMP3431 Robot Software Architectures Week 2 ROS Continued David Rajaratnam Click to edit Present s Name ROS Continued What we're doing today: Recap from last week Example of turtlebot setup Frames of
MoveIt. Release Indigo. MoveIt Motion Planning Framework
 MoveIt Release Indigo MoveIt Motion Planning Framework August 10, 2016 Contents 1 Beginner Tutorials 1 2 Advanced Tutorials 13 3 Configuration Tutorials 23 i ii CHAPTER 1 Beginner Tutorials 1.1 Move Group
MoveIt Release Indigo MoveIt Motion Planning Framework August 10, 2016 Contents 1 Beginner Tutorials 1 2 Advanced Tutorials 13 3 Configuration Tutorials 23 i ii CHAPTER 1 Beginner Tutorials 1.1 Move Group
Mobile Robots Robot Operating System (ROS)
") Mobile Robots Robot Operating System (ROS) Institute for Software Technology 1 Motivation Beer me https://www.youtube.com/watch?v=c3cq0sy4tbs 2 Robotics is Easy control behavior perception modelling domain
Mobile Robots Robot Operating System (ROS) Institute for Software Technology 1 Motivation Beer me https://www.youtube.com/watch?v=c3cq0sy4tbs 2 Robotics is Easy control behavior perception modelling domain
INF Introduction to Robot Operating System
 INF3480 - Introduction to Robot Operating System February 22, 2017 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
INF3480 - Introduction to Robot Operating System February 22, 2017 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN
 ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN ROBOTICS EVOLUTION SIMPLIFIED! Micro Controller Brain Sumo Line follower Maze solver Firefighting...
ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN ROBOTICS EVOLUTION SIMPLIFIED! Micro Controller Brain Sumo Line follower Maze solver Firefighting...
T. Moulard () ROS tutorial January / 32
 ROS tutorial January / 32") ROS tutorial Thomas Moulard LAAS robotics courses, January 2012 T. Moulard () ROS tutorial January 2012 1 / 32 So what is ROS? A component oriented robotics framework, A development suite, A (bad) package
ROS tutorial Thomas Moulard LAAS robotics courses, January 2012 T. Moulard () ROS tutorial January 2012 1 / 32 So what is ROS? A component oriented robotics framework, A development suite, A (bad) package
16-662: Robot Autonomy Project Bi-Manual Manipulation Final Report
 16-662: Robot Autonomy Project Bi-Manual Manipulation Final Report Oliver Krengel, Abdul Zafar, Chien Chih Ho, Rohit Murthy, Pengsheng Guo 1 Introduction 1.1 Goal We aim to use the PR2 robot in the search-based-planning
16-662: Robot Autonomy Project Bi-Manual Manipulation Final Report Oliver Krengel, Abdul Zafar, Chien Chih Ho, Rohit Murthy, Pengsheng Guo 1 Introduction 1.1 Goal We aim to use the PR2 robot in the search-based-planning
ROS-Industrial Basic Developer s Training Class. Southwest Research Institute
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 3: Motion Control of Manipulators Southwest Research Institute 2 URDF: Unified Robot Description Format 3 URDF: Overview
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 3: Motion Control of Manipulators Southwest Research Institute 2 URDF: Unified Robot Description Format 3 URDF: Overview
Introduction to the Robot Operating System (ROS)
") - Lisboa Introduction to Robotics 2018/2019 Introduction to the Robot Operating System (ROS) Rodrigo Ventura Instituto Superior Técnico, Universidade de Lisboa rodrigo.ventura@isr.tecnico.ulisboa.pt What
- Lisboa Introduction to Robotics 2018/2019 Introduction to the Robot Operating System (ROS) Rodrigo Ventura Instituto Superior Técnico, Universidade de Lisboa rodrigo.ventura@isr.tecnico.ulisboa.pt What
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class August 2017 Southwest Research Institute 1 Session 2: ROS Basics Continued Southwest Research Institute 2 Outline Services Actions Launch Files Parameters
ROS-Industrial Basic Developer s Training Class August 2017 Southwest Research Institute 1 Session 2: ROS Basics Continued Southwest Research Institute 2 Outline Services Actions Launch Files Parameters
An Introduction to ROS. Or how to write code that starts fires!
 An Introduction to ROS Or how to write code that starts fires! A Conceptual Overview Nodes, Topics and Messages What is ROS? Stands for Robotics Operating System NOT an Operating System. Provides many
An Introduction to ROS Or how to write code that starts fires! A Conceptual Overview Nodes, Topics and Messages What is ROS? Stands for Robotics Operating System NOT an Operating System. Provides many
Event-based Systems with ROS: Examples from the STAIR Project
 Event-based Systems with ROS: Examples from the STAIR Project Morgan Quigley Stanford University Joint work with: Stanford: Blake Carpenter, Adam Coates, Quoc Le, Ellen Klingbeil, Andrew Ng, many others
Event-based Systems with ROS: Examples from the STAIR Project Morgan Quigley Stanford University Joint work with: Stanford: Blake Carpenter, Adam Coates, Quoc Le, Ellen Klingbeil, Andrew Ng, many others
INF Introduction to Robot Operating System
 INF3480 - Introduction to Robot Operating System April 19, 2018 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
INF3480 - Introduction to Robot Operating System April 19, 2018 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
ROS: Robot Operating System. Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014
 ROS: Robot Operating System Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014 Overview Features & Philosophies Core elements Development pipeline Useful ROS nodes / tools What
ROS: Robot Operating System Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014 Overview Features & Philosophies Core elements Development pipeline Useful ROS nodes / tools What
Introduction to Robot Operating System (ROS) using C++
 using C++") 1/22 1 Introduction to Robot Operating System (ROS) using C++ Mahmoud Abdul Galil Tutorial-2 These slides are based on the online ROS Wiki documentation 2/22 2 ros-example-1 Cont'd: CMakeLists.txt lwe
1/22 1 Introduction to Robot Operating System (ROS) using C++ Mahmoud Abdul Galil Tutorial-2 These slides are based on the online ROS Wiki documentation 2/22 2 ros-example-1 Cont'd: CMakeLists.txt lwe
How I Learned to Stop Reinventing and Love the Wheels. with (home/hackerspace) robotics
 robotics") How I Learned to Stop Reinventing and Love the Wheels 1 or having Andreas FUNBihlmaier with (home/hackerspace) robotics Overview On Reinventing Wheels in Robotics ROS Technical Overview and Concepts Hardware
How I Learned to Stop Reinventing and Love the Wheels 1 or having Andreas FUNBihlmaier with (home/hackerspace) robotics Overview On Reinventing Wheels in Robotics ROS Technical Overview and Concepts Hardware
Robot Vision Systems Lecture 10: ROS Basics
 Computer Vision Laboratory Robot Vision Systems Lecture 10: ROS Basics Michael Felsberg michael.felsberg@liu.se ROS Topics turtlesim_node subscribes to the same topic that turtle_teleop_key publishes to
Computer Vision Laboratory Robot Vision Systems Lecture 10: ROS Basics Michael Felsberg michael.felsberg@liu.se ROS Topics turtlesim_node subscribes to the same topic that turtle_teleop_key publishes to
E28 FALL 2016 ZUCKER PROJECT 1. Project 1: TurtleBot 2 Programming Basics
 Project 1: TurtleBot 2 Programming Basics OVERVIEW In this lab, you will learn about the Open Source Robotics Foundation ROS software, and get to know your TurtleBot 2 robot. You will also program your
Project 1: TurtleBot 2 Programming Basics OVERVIEW In this lab, you will learn about the Open Source Robotics Foundation ROS software, and get to know your TurtleBot 2 robot. You will also program your
ROS Robot Operating System
 ROS Robot Operating System Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Why ROS? Understanding ROS community level Levels of development in ROS Understanding the ROS file system level Understanding
ROS Robot Operating System Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Why ROS? Understanding ROS community level Levels of development in ROS Understanding the ROS file system level Understanding
Gazebo. Amirreza Kabiri Fatemeh Pahlevan Aghababa. Autumn 2017
 Gazebo Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 History Started in fall 2002 in USC by Dr. Andrew Howard and his student Nate Koenig as a complementary simulator to Stage, Nate continue to
Gazebo Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 History Started in fall 2002 in USC by Dr. Andrew Howard and his student Nate Koenig as a complementary simulator to Stage, Nate continue to
The Problem. Robotics is a huge and growing area: research, innovation Lack of standards for robotics. Programming Robots with ROS
 ROS Introduction Main concepts Basic commands Borrowed extensively from: Roi Yehoshua, BIU The Problem Robotics is a huge and growing area: research, innovation Lack of standards for robotics (C)2016 Roi
ROS Introduction Main concepts Basic commands Borrowed extensively from: Roi Yehoshua, BIU The Problem Robotics is a huge and growing area: research, innovation Lack of standards for robotics (C)2016 Roi
Construction of SCARA robot simulation platform based on ROS
 Construction of SCARA robot simulation platform based on ROS Yingpeng Yang a, Zhaobo Zhuang b and Ruiqi Xu c School of Shandong University of Science and Technology, Shandong 266590, China; ayangyingp1992@163.com,
Construction of SCARA robot simulation platform based on ROS Yingpeng Yang a, Zhaobo Zhuang b and Ruiqi Xu c School of Shandong University of Science and Technology, Shandong 266590, China; ayangyingp1992@163.com,
Construction of Mobile Robots Software
 Construction of Mobile Robots Software Institute for Software Technology 1 Referee Box I central game controller automatically controls the game time keeping game phases robot status orders machine status
Construction of Mobile Robots Software Institute for Software Technology 1 Referee Box I central game controller automatically controls the game time keeping game phases robot status orders machine status
Intern Presentation:
 : Gripper Stereo and Assisted Teleoperation Stanford University December 13, 2010 Outline 1. Introduction 2. Hardware 3. Research 4. Packages 5. Conclusion Introduction Hardware Research Packages Conclusion
: Gripper Stereo and Assisted Teleoperation Stanford University December 13, 2010 Outline 1. Introduction 2. Hardware 3. Research 4. Packages 5. Conclusion Introduction Hardware Research Packages Conclusion
COMP3431 Robot Software Architectures
 COMP3431 Robot Software Architectures Week 1 Introduction to ROS David Rajaratnam Click to edit Present s Name People Prof. Claude Sammut claude@cse.unsw.edu.au Timothy Wiley t.wiley@unsw.edu.au David
COMP3431 Robot Software Architectures Week 1 Introduction to ROS David Rajaratnam Click to edit Present s Name People Prof. Claude Sammut claude@cse.unsw.edu.au Timothy Wiley t.wiley@unsw.edu.au David
ROS: Tips n' Tricks. by: Anqi Xu COMP-417, McGill University Monday September 20th, Inspired by presentation of Marek Doniec, MIT
 ROS: Tips n' Tricks by: Anqi Xu COMP-417, McGill University Monday September 20th, 2013 Inspired by presentation of Marek Doniec, MIT Overview What is ROS? Features Philosophies Core elements Development
ROS: Tips n' Tricks by: Anqi Xu COMP-417, McGill University Monday September 20th, 2013 Inspired by presentation of Marek Doniec, MIT Overview What is ROS? Features Philosophies Core elements Development
Programming Robots with ROS, Morgan Quigley, Brian Gerkey & William D. Smart
 Programming Robots with ROS, Morgan Quigley, Brian Gerkey & William D. Smart O Reilly December 2015 CHAPTER 23 Using C++ in ROS We chose to use Python for this book for a number of reasons. First, it s
Programming Robots with ROS, Morgan Quigley, Brian Gerkey & William D. Smart O Reilly December 2015 CHAPTER 23 Using C++ in ROS We chose to use Python for this book for a number of reasons. First, it s
Cloud Robotics. Damon Kohler, Ryan Hickman (Google) Ken Conley, Brian Gerkey (Willow Garage) May 11, 2011
 Ken Conley, Brian Gerkey (Willow Garage) May 11, 2011") 1 Cloud Robotics Damon Kohler, Ryan Hickman (Google) Ken Conley, Brian Gerkey (Willow Garage) May 11, 2011 2 Overview Introduction (Ryan) ROS (Ken and Brian) ROS on Android (Damon) Closing Remarks (Ryan)
1 Cloud Robotics Damon Kohler, Ryan Hickman (Google) Ken Conley, Brian Gerkey (Willow Garage) May 11, 2011 2 Overview Introduction (Ryan) ROS (Ken and Brian) ROS on Android (Damon) Closing Remarks (Ryan)
ROBOT NAVIGATION ROBOTICS
 ROBOT NAVIGATION ROBOTICS OUR IMPLEMENTATION /joy joy_cmd /cmd_joy / /velocity ROBOT joy_node /odom JOYPAD pose OUR IMPLEMENTATION /mode /joy joy_cmd /cmd_joy mux / /velocity /cmd_auto ROBOT joy_node planner
ROBOT NAVIGATION ROBOTICS OUR IMPLEMENTATION /joy joy_cmd /cmd_joy / /velocity ROBOT joy_node /odom JOYPAD pose OUR IMPLEMENTATION /mode /joy joy_cmd /cmd_joy mux / /velocity /cmd_auto ROBOT joy_node planner
moveit Release Indigo
 moveit t utorials Release Indigo November 10, 2016 Contents 1 Beginner 3 2 Advanced 23 3 Integration with New Robot 51 4 Configuration 71 5 Attribution 75 i ii These tutorials will run you through how
moveit t utorials Release Indigo November 10, 2016 Contents 1 Beginner 3 2 Advanced 23 3 Integration with New Robot 51 4 Configuration 71 5 Attribution 75 i ii These tutorials will run you through how
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class August 2017 Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Catkin (Create workspace) Installing
ROS-Industrial Basic Developer s Training Class August 2017 Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Catkin (Create workspace) Installing
Robotics System Toolbox
 Developing Robotics Applications with MATLAB, Simulink: Introducing the Robotics System Toolbox 2016 MathWorks, Inc. 1 What Are You Doing with Robotics? Build Robots 2 Using MATLAB and Simulink for Building
Developing Robotics Applications with MATLAB, Simulink: Introducing the Robotics System Toolbox 2016 MathWorks, Inc. 1 What Are You Doing with Robotics? Build Robots 2 Using MATLAB and Simulink for Building
ROS : Robot Operating System
 ROS : Robot Operating System Weipeng He 2he@informatik.uni-hamburg.de 5 November, 2012 Outline Introduction Motivation Software Structure Community Conclusion Introduction What is ROS? ROS is Robot Operating
ROS : Robot Operating System Weipeng He 2he@informatik.uni-hamburg.de 5 November, 2012 Outline Introduction Motivation Software Structure Community Conclusion Introduction What is ROS? ROS is Robot Operating
Introduction to the Robot Operating System (ROS) Middleware
 Middleware") Introduction to the Robot Operating System (ROS) Middleware Mike Anderson Chief Scientist The PTR Group, LLC. mailto: mike@theptrgroup.com http://www.theptrgroup.com What We Will Talk About What is ROS?
Introduction to the Robot Operating System (ROS) Middleware Mike Anderson Chief Scientist The PTR Group, LLC. mailto: mike@theptrgroup.com http://www.theptrgroup.com What We Will Talk About What is ROS?
Cognitive Robotics ROS Introduction Matteo Matteucci
 Cognitive Robotics ROS Introduction ROS: Robot Operating System Presented in 2009 by Willow Garage is a meta-operating system for robotics with a rich ecosystem of tools and programs 2 ROS: Robot Operating
Cognitive Robotics ROS Introduction ROS: Robot Operating System Presented in 2009 by Willow Garage is a meta-operating system for robotics with a rich ecosystem of tools and programs 2 ROS: Robot Operating
WORKING WITH BAXTER MOVEIT, PILLAR AND OTHER OBJECTS
 WORKING WITH BAXTER MOVEIT, PILLAR AND OTHER OBJECTS Tom Harman, Carol Fairchild, Louise Li. 3/7/2015 1 Contents FIRST, WATCH THIS VIDEO... 3 See how to run MoveIt and Manipulate Baxter s arms.... 3 TURN
WORKING WITH BAXTER MOVEIT, PILLAR AND OTHER OBJECTS Tom Harman, Carol Fairchild, Louise Li. 3/7/2015 1 Contents FIRST, WATCH THIS VIDEO... 3 See how to run MoveIt and Manipulate Baxter s arms.... 3 TURN
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 4 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 27.02.2017 1 Course Structure Course 1 Course 2 Course 3
Programming for Robotics Introduction to ROS Course 4 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 27.02.2017 1 Course Structure Course 1 Course 2 Course 3
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Installing Packages / Nodes Parameters Messages
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Installing Packages / Nodes Parameters Messages
Sheet 2 Topic: Motion Models and Robot Odometry
 Visual Navigation for Flying Robots Computer Vision Group D. Cremers, J. Sturm, N. Engelhard Institut für Informatik Summer Term 2012 Technische Universität München Sheet 2 Topic: Motion Models and Robot
Visual Navigation for Flying Robots Computer Vision Group D. Cremers, J. Sturm, N. Engelhard Institut für Informatik Summer Term 2012 Technische Universität München Sheet 2 Topic: Motion Models and Robot
Laser, Kinect, Gmapping, Localization, PathPlanning
 Soso s knowledge Laser, Kinect, Gmapping, Localization, PathPlanning Faculty of Information Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz 99.99.9999 Sensors Stereo
Soso s knowledge Laser, Kinect, Gmapping, Localization, PathPlanning Faculty of Information Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz 99.99.9999 Sensors Stereo
Part 1: Rtabmap_ros Installation and Running SLAM with Recorded Sensor Data
 Assignment #4: Running SLAM with RGB-D sensor data Release: Jan 24, 2017 Due: Feb 2 (depends on signup) Checkoff Location: John Crerar Library - Kathleen A. Zar Room We will setup the space at John Crerar
Assignment #4: Running SLAM with RGB-D sensor data Release: Jan 24, 2017 Due: Feb 2 (depends on signup) Checkoff Location: John Crerar Library - Kathleen A. Zar Room We will setup the space at John Crerar
EE-565-Lab2. Dr. Ahmad Kamal Nasir
 EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
Adding a Sensor to the PR2. ROS + PR2 Training Workshop Kevin Watts
 Adding a Sensor to the PR2 ROS + Kevin Watts Modifying the PR2 You may want to modify the PR2 for research Add sensor or device Add functionality Change color Today, we'll add a Hokuyo laser scanner to
Adding a Sensor to the PR2 ROS + Kevin Watts Modifying the PR2 You may want to modify the PR2 for research Add sensor or device Add functionality Change color Today, we'll add a Hokuyo laser scanner to
begins halting unexpectedly, doing one or more of the following may improve performance;
 CLEARPATH ROBOTICS F r o m T h e D e s k o f T h e R o b o t s m i t h s Thank you for your Husky A200 order! As part of the integration, we have prepared this quick reference sheet for you and your team
CLEARPATH ROBOTICS F r o m T h e D e s k o f T h e R o b o t s m i t h s Thank you for your Husky A200 order! As part of the integration, we have prepared this quick reference sheet for you and your team
Robocup In summary. Amirreza Kabiri Fatemeh Pahlevan Aghababa
 Robocup 2017 In summary Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Outline Models Hardware Specifications Software Specifications Game Field Specifications RoboCup2017RVRL_Demo Repository How
Robocup 2017 In summary Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Outline Models Hardware Specifications Software Specifications Game Field Specifications RoboCup2017RVRL_Demo Repository How
Architectures. Gerald Steinbauer Institute for Software Technology. Gerald Steinbauer. Advanced Robotics - Architectures
 Advanced Robotics Architectures Institute for Software Technology 1 Agenda Motivation Function vs. Operation Requirements to Architectures Classical Architectures Sample Architectures and Frameworks Robot
Advanced Robotics Architectures Institute for Software Technology 1 Agenda Motivation Function vs. Operation Requirements to Architectures Classical Architectures Sample Architectures and Frameworks Robot
Progress review #3. Gauri Gandhi. Team G Robographers. Teammates: Rohit Dashrathi. Jimit Gandhi. Tiffany May. Sida Wang ILR #4
 Progress review #3 Gauri Gandhi Team G Robographers Teammates: Rohit Dashrathi Jimit Gandhi Tiffany May Sida Wang ILR #4 November 12, 2015 1 a. Individual Progress For the third progress review, I worked
Progress review #3 Gauri Gandhi Team G Robographers Teammates: Rohit Dashrathi Jimit Gandhi Tiffany May Sida Wang ILR #4 November 12, 2015 1 a. Individual Progress For the third progress review, I worked
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 2: ROS and Roboscoop Robots of today Many sensors and actuators Able to operate in familiar or expected environments
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 2: ROS and Roboscoop Robots of today Many sensors and actuators Able to operate in familiar or expected environments
ROS: introduction, concepts and examples
 ROS: introduction, concepts and examples Cédric Pradalier October 16 th, 2013 Objectives of this talk ROS and middleware Quick presentation Quick comparison Use case For teaching For research 2/21 Cédric
ROS: introduction, concepts and examples Cédric Pradalier October 16 th, 2013 Objectives of this talk ROS and middleware Quick presentation Quick comparison Use case For teaching For research 2/21 Cédric
AMR 2011/2012: Final Projects
 AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
Intelligent Robots Seminar
 Intelligent Robots Seminar Topic: Robotics Software Architectures 11/18/2013 Anton Kiggundu Msc. IAS 1 Outline 1. Background Description of Robotic Software Architecture 2. What is Robot Operating System?
Intelligent Robots Seminar Topic: Robotics Software Architectures 11/18/2013 Anton Kiggundu Msc. IAS 1 Outline 1. Background Description of Robotic Software Architecture 2. What is Robot Operating System?
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 4: More Advanced Topics (Descartes and Perception) Southwest Research Institute 2 MOVEIT! CONTINUED 3 Motion Planning
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 4: More Advanced Topics (Descartes and Perception) Southwest Research Institute 2 MOVEIT! CONTINUED 3 Motion Planning
Lorenzo Natale. Coordination and Communication with the YARP middleware
 11/19/2014 2 Lorenzo Natale Coordination and Communication with the YARP middleware Humanoids 2015 workshop: A day with a humanoid robot November 18, Madrid Spain why is the icub special? hands: we started
11/19/2014 2 Lorenzo Natale Coordination and Communication with the YARP middleware Humanoids 2015 workshop: A day with a humanoid robot November 18, Madrid Spain why is the icub special? hands: we started
John Hsu Nate Koenig ROSCon 2012
 John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
Flying Penguins. Embedded Linux applications for autonomous UAVs
 Flying Penguins Embedded Linux applications for autonomous UAVs Clay McClure github.com/claymation Roadmap UAV MAV Link mavros Your App ROS Linux autopilot autopilots autopilots RC input motor mixing
Flying Penguins Embedded Linux applications for autonomous UAVs Clay McClure github.com/claymation Roadmap UAV MAV Link mavros Your App ROS Linux autopilot autopilots autopilots RC input motor mixing
IN 5 PAGES The Construct Sim, Inc. All Rights Reserved
 Common Command-line Tools roscore A collection of nodes and programs that are pre-requisites of a ROS-based system. You must have a roscore running in order for ROS nodes to communicate. $ roscore roslaunch
Common Command-line Tools roscore A collection of nodes and programs that are pre-requisites of a ROS-based system. You must have a roscore running in order for ROS nodes to communicate. $ roscore roslaunch
FlyVR Documentation. Release 0.9. Andrew Straw
 FlyVR Documentation Release 0.9 Andrew Straw August 27, 2016 Contents 1 FlyVR pipeline overview 3 1.1 Installation and Getting Started..................................... 3 1.2 Using the joystick for
FlyVR Documentation Release 0.9 Andrew Straw August 27, 2016 Contents 1 FlyVR pipeline overview 3 1.1 Installation and Getting Started..................................... 3 1.2 Using the joystick for
Teaching Assistant: Roi Yehoshua
 Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Introduction to ROS ROS Main Features ROS Main Concepts Installing ROS Agenda Course Administration Course s home page: http://www.cs.biu.ac.il/~yehoshr1/89-685/
Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Introduction to ROS ROS Main Features ROS Main Concepts Installing ROS Agenda Course Administration Course s home page: http://www.cs.biu.ac.il/~yehoshr1/89-685/
THE LAUNCHER. Patcher, updater, launcher for Unity. Documentation file. - assetstore.unity.com/publishers/19358
 THE LAUNCHER Patcher, updater, launcher for Unity. Documentation file Index: 1.What does the Launcher do? 2.Workflow 3.How to upload a build? 4.How to configure the launcher client? 1.What does the Launcher
THE LAUNCHER Patcher, updater, launcher for Unity. Documentation file Index: 1.What does the Launcher do? 2.Workflow 3.How to upload a build? 4.How to configure the launcher client? 1.What does the Launcher
CSCE574 Robotics Spring 2014 Notes on Images in ROS
 CSCE574 Robotics Spring 2014 Notes on Images in ROS 1 Images in ROS In addition to the fake laser scans that we ve seen so far with This document has some details about the image data types provided by
CSCE574 Robotics Spring 2014 Notes on Images in ROS 1 Images in ROS In addition to the fake laser scans that we ve seen so far with This document has some details about the image data types provided by
Introduction to Robotics
 Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. July 2013 J. Zhang 1 Task-level
Jianwei Zhang zhang@informatik.uni-hamburg.de Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme 05. July 2013 J. Zhang 1 Task-level
Baxter Research Robot. Introductory Training
 Baxter Research Robot Introductory Training CONTENTS 1. Hardware Set Up Physical Hardware Connections Booting Networking End-Effectors 2. Wiki/Github/Community Forums 3. Baxter Research Robot SDK ROS Overview
Baxter Research Robot Introductory Training CONTENTS 1. Hardware Set Up Physical Hardware Connections Booting Networking End-Effectors 2. Wiki/Github/Community Forums 3. Baxter Research Robot SDK ROS Overview
Progress review #4. Gauri Gandhi. Team G Robographers. Teammates: Rohit Dashrathi. Jimit Gandhi. Tiffany May. Sida Wang ILR #5
 Progress review #4 Gauri Gandhi Team G Robographers Teammates: Rohit Dashrathi Jimit Gandhi Tiffany May Sida Wang ILR #5 November 25, 2015 1 a. Individual Progress For the fourth progress review, I worked
Progress review #4 Gauri Gandhi Team G Robographers Teammates: Rohit Dashrathi Jimit Gandhi Tiffany May Sida Wang ILR #5 November 25, 2015 1 a. Individual Progress For the fourth progress review, I worked
irobot Create Setup with ROS and Implement Odometeric Motion Model
 irobot Create Setup with ROS and Implement Odometeric Motion Model Welcome Lab 4 Dr. Ahmad Kamal Nasir 18.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to irobot-create Hardware Communication
irobot Create Setup with ROS and Implement Odometeric Motion Model Welcome Lab 4 Dr. Ahmad Kamal Nasir 18.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to irobot-create Hardware Communication
ADI Driver Documentation
 ADI Driver Documentation Release 1.9.1 Tokyo Opensource Robotics Kyokai Association Jan 16, 2019 Contents 1 Prerequisite 3 1.1 Install ROS.............................................. 3 1.2 Install adi_driver
ADI Driver Documentation Release 1.9.1 Tokyo Opensource Robotics Kyokai Association Jan 16, 2019 Contents 1 Prerequisite 3 1.1 Install ROS.............................................. 3 1.2 Install adi_driver
Robotics Documentation
 Robotics Documentation Release 1.0 FIWARE-RoboticsGE Mar 01, 2018 Contents 1 User & Programmer Guide 3 1.1 Enable the platform........................................... 3 1.2 Add robots................................................
Robotics Documentation Release 1.0 FIWARE-RoboticsGE Mar 01, 2018 Contents 1 User & Programmer Guide 3 1.1 Enable the platform........................................... 3 1.2 Add robots................................................
MCECS Bot Developer Guide. Summer 2014, revision 1.1
 MCECS Bot Developer Guide Summer 2014, revision 1.1 Table of Contents Introduction Jeeves Overview Actuators Holonomic Base Motion Model 3 DoF Waist 3 DoF Arm 2 DoF Head Sensors Encoders Odometry model.
MCECS Bot Developer Guide Summer 2014, revision 1.1 Table of Contents Introduction Jeeves Overview Actuators Holonomic Base Motion Model 3 DoF Waist 3 DoF Arm 2 DoF Head Sensors Encoders Odometry model.
Set up and Foundation of the Husky
 Set up and Foundation of the Husky Marisa Warner, Jeremy Gottlieb, Gabriel Elkaim Worcester Polytechnic Institute University of California, Santa Cruz Abstract Clearpath s Husky A200 is an unmanned ground
Set up and Foundation of the Husky Marisa Warner, Jeremy Gottlieb, Gabriel Elkaim Worcester Polytechnic Institute University of California, Santa Cruz Abstract Clearpath s Husky A200 is an unmanned ground
Individual Lab Report #6. Pratik Chatrath. Team A / Team Avengers. Teammates: Tushar Agrawal, Sean Bryan. January 28, 2016
 Individual Lab Report #6 Pratik Chatrath Team A / Team Avengers Teammates: Tushar Agrawal, Sean Bryan January 28, 2016 I. Individual Progress Overall in the last semester, I worked on developing obstacle
Individual Lab Report #6 Pratik Chatrath Team A / Team Avengers Teammates: Tushar Agrawal, Sean Bryan January 28, 2016 I. Individual Progress Overall in the last semester, I worked on developing obstacle
data source/sink to which messages are posted to or subscribed from. a topic consists of a namespace/topicname.
 AARNET.org sources deb http://mirror.aarnet.edu.au/pub/ubuntu/archive/ raring main deb-src http://mirror.aarnet.edu.au/pub/ubuntu/archive/ raring main ROS Installing sudo apt-get install ros-hydro-desktop-full
AARNET.org sources deb http://mirror.aarnet.edu.au/pub/ubuntu/archive/ raring main deb-src http://mirror.aarnet.edu.au/pub/ubuntu/archive/ raring main ROS Installing sudo apt-get install ros-hydro-desktop-full
DOBBY: A Desk Organizing Bot BassicallY
 1 DOBBY: A Desk Organizing Bot BassicallY Aayush Mudgal Columbia University New York, NY, 10027 am4590@columbia.edu Mehul Kumar Columbia University New York, NY, 10027 mk3916@columbia.edu Abstract Humans
1 DOBBY: A Desk Organizing Bot BassicallY Aayush Mudgal Columbia University New York, NY, 10027 am4590@columbia.edu Mehul Kumar Columbia University New York, NY, 10027 mk3916@columbia.edu Abstract Humans
Tutorial on Robot Operating System (ROS)
") Tutorial on Robot Operating System (ROS) Mayank Mittal Indian Institute of Technology, Kanpur mayankm@iitk.ac.in June 7, 2018 Mayank Mittal (IIT Kanpur) Tutorial on ROS June 7, 2018 1 / 20 Requirements
Tutorial on Robot Operating System (ROS) Mayank Mittal Indian Institute of Technology, Kanpur mayankm@iitk.ac.in June 7, 2018 Mayank Mittal (IIT Kanpur) Tutorial on ROS June 7, 2018 1 / 20 Requirements
Equipment use workshop How to use the sweet-pepper harvester
 Equipment use workshop How to use the sweet-pepper harvester Jochen Hemming (Wageningen UR) September-2014 Working environment robot Environmental conditions Temperature: 13 to 35 C Relative Humidity:
Equipment use workshop How to use the sweet-pepper harvester Jochen Hemming (Wageningen UR) September-2014 Working environment robot Environmental conditions Temperature: 13 to 35 C Relative Humidity:
MoveIt! Task Constructor A framework for planning task sequences
 MoveIt! Task Constructor A framework for planning task sequences Robert Haschke 1, Michael Görner 2 1 Center of Excellence Cognitive Interaction Technology (CITEC), Bielefeld University, Germany 2 TAMS
MoveIt! Task Constructor A framework for planning task sequences Robert Haschke 1, Michael Görner 2 1 Center of Excellence Cognitive Interaction Technology (CITEC), Bielefeld University, Germany 2 TAMS
CS 309: Autonomous Intelligent Robotics FRI I. Lecture 18: Coordinate Frames TF2 Alvar. Instructor: Justin Hart
 CS 309: Autonomous Intelligent Robotics FRI I Lecture 18: Coordinate Frames TF2 Alvar Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 4 Due March
CS 309: Autonomous Intelligent Robotics FRI I Lecture 18: Coordinate Frames TF2 Alvar Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 4 Due March
Platypus Lutra Documentation
 Platypus Lutra Documentation Release 1.0 RDML April 25, 2016 User Documentation 1 Setup and launch of the sami-crw software 3 1.1 Installing the Software.......................................... 3 1.2
Platypus Lutra Documentation Release 1.0 RDML April 25, 2016 User Documentation 1 Setup and launch of the sami-crw software 3 1.1 Installing the Software.......................................... 3 1.2
A FAST AND ACCURATE ROBOTIC GRASP METHOD USING DEEP LEARNING. A Thesis. presented to. the Faculty of the Graduate School
 A FAST AND ACCURATE ROBOTIC GRASP METHOD USING DEEP LEARNING A Thesis presented to the Faculty of the Graduate School at the University of Missouri-Columbia In Partial Fulfillment of the Requirements for
A FAST AND ACCURATE ROBOTIC GRASP METHOD USING DEEP LEARNING A Thesis presented to the Faculty of the Graduate School at the University of Missouri-Columbia In Partial Fulfillment of the Requirements for
LOITOR Visual-Inertial Camera. Instruction manual V0.6
 LOITOR Visual-Inertial Camera Instruction manual V0.6 Loitor Visual Inertial Camera is a general vision sensor designed for visual algorithm developers.providing abundant hardware control interface and
LOITOR Visual-Inertial Camera Instruction manual V0.6 Loitor Visual Inertial Camera is a general vision sensor designed for visual algorithm developers.providing abundant hardware control interface and
Distributed Robotic Architecture
 Distributed Robotic Architecture Using Actin and DDS Justin Keesling Energid Technologies www.energid.com Overview Who is Energid? What is Actin? Actin with DDS Tasking with DDS Projects using DDS Live
Distributed Robotic Architecture Using Actin and DDS Justin Keesling Energid Technologies www.energid.com Overview Who is Energid? What is Actin? Actin with DDS Tasking with DDS Projects using DDS Live
Assignment 1. Please follow these instructions to install ROS; you will want to install the ROS Indigo Igloo (rosindigo-desktop-full
 Assignment 1 The objective of this assignment is for you to become familiar with the Robot Operating System (ROS) software, which you will be using in future assignments to program various algorithms for
Assignment 1 The objective of this assignment is for you to become familiar with the Robot Operating System (ROS) software, which you will be using in future assignments to program various algorithms for
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 2: ROS Basics Continued Southwest Research Institute 2 Outline Services Actions Launch Files TF 3 Services 4 Services
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 2: ROS Basics Continued Southwest Research Institute 2 Outline Services Actions Launch Files TF 3 Services 4 Services
A Gentle Introduction to ROS
 A Gentle Introduction to ROS Chapter: Getting started Jason M. O Kane Jason M. O Kane University of South Carolina Department of Computer Science and Engineering 315 Main Street Columbia, SC 29208 http://www.cse.sc.edu/~jokane
A Gentle Introduction to ROS Chapter: Getting started Jason M. O Kane Jason M. O Kane University of South Carolina Department of Computer Science and Engineering 315 Main Street Columbia, SC 29208 http://www.cse.sc.edu/~jokane
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 3 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 24.02.2017 1 Course Structure Course 1 Course 2 Course 3
Programming for Robotics Introduction to ROS Course 3 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 24.02.2017 1 Course Structure Course 1 Course 2 Course 3
Motion Planning Strategy For a 6-DOFs Robotic Arm In a Controlled Environment
 University of Bonn, Germany Computer Science Department Motion Planning Strategy For a 6-DOFs Robotic Arm In a Controlled Environment Angeliki Topalidou-Kyniazopoulou Thesis Committee Sven Behnke Maren
University of Bonn, Germany Computer Science Department Motion Planning Strategy For a 6-DOFs Robotic Arm In a Controlled Environment Angeliki Topalidou-Kyniazopoulou Thesis Committee Sven Behnke Maren