INF Introduction to Robot Operating System
|
|
|
- Chad Anderson
- 5 years ago
- Views:
Transcription
1 INF Introduction to Robot Operating System February 22, 2017 Justinas Mišeikis
2 Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the slides marked with Study Material such as below. Study Material
3 Let s Design a Robot

4 Encoders Control Pendant Motors Robot Controller Motor controllers Inverse Kinematics Trajectory Planner PID Controller GUI Collision Detection Error Teaching Monitoring Mode
5 What a mess! How can we deal with it?




6 ROS is an open-source, meta-operating system
7 What s so special about ROS? Reusable robotics components! 120+ Robotic platforms officially support ROS (+25 from this time last year) Modular design Hundreds of ready to use algorithms Efficient, so it can be used for actual products, not just prototyping Runs on Ubuntu, also ARM Processors Experimental versions for OS X, Android, Arch Linux, Debian, OpenEmbedded/Yocto Parallelisation and networking made easy, can use multiple machines simultaneously
8 Current Robotics Job Ads A relevant degree is required, for instance in Computer Science or Engineering. A background in Robotics/Computer Vision is desirable, while knowledge of the Robot Operating System (ROS), the Point Cloud Library (PCL), or the Open Source Computer Vision Library (OpenCV) is a big plus. ** Job Requirements ** - Experience with software development and integration preferably in a Linux environment - Proficient in C, C++, Python and Matlab - Those with past experience using ROS will be preferred ** Required Qualifications ** - A university degree (Master or Diplom-Ingenieur) - Proven programming skills in Matlab, C / C ++, ROS - Good knowledge of cooperative software development with GIT or SVN Goal of this PhD is to study, design and build novel industry-level software based on ROS or ROS-Industry which is modular, reconfigurable, adaptive, easy to use to integrate and control various robotic systems. The candidate must be a proficient user of C/C++ and ROS and any relevant computer vision library (e.g., ViSP, OpenCV, PCL). Scientific curiosity, large autonomy and ability to work independently are also expected. Required Skills * MSc in Engineering / Computer Science or equivalent. * Experience with Robotics * Knowledge about ROS (Robot Operating System) and CV. * Advanced experience with C++ and soft real-time programming. * Team spirit and ability to work independently. * Excellent communication skills, flexibility and creativity.
9 ROS Plumbing Tools Capabilities Ecosystem Study Material
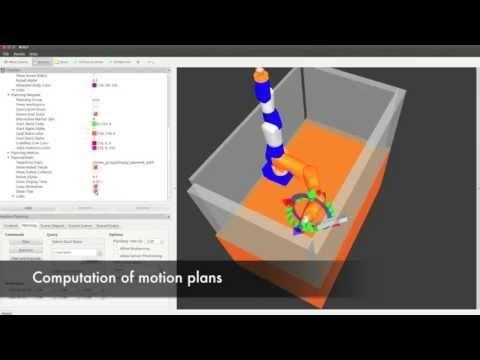
10 Let s see how it works! Plumbing
11 Nodes Nodes are processes that perform computation, executables Camera Motion Planner Mapping Study Material
12 Topics Topics are streams of data with publish / subscribe semantics. They are uniquely identifiable by its name Motion Planner Camera /cam/img /map/pos Mapping Study Material
13 Services Request / reply is done via services, which are defined by a pair of message structures: one for the request and one for the reply. Motion Planner Camera /cam/img /map/pos Mapping Battery indicator Study Material
14 Messages A message is simply a data structure, comprising typed fields. Language agnostic data representation. C++ can talk to Python. Motion Planner File: pos.msg string robotname Mapping uint32 posx uint32 posy uint32 goalx uint32 goaly Study Material
15 ROS Master The ROS Master provides name registration and lookup to nodes. Without the Master, nodes would not be able to find each other, exchange messages, or invoke services. Camera Camera Camera Publish ROS Master Image Viewer ROS Master Img Image Viewer Subscribe Study Material ROS Master Img Image Viewer
16 Example System - Mobile Robot Green - Sensors Blue - Planning algorithms Red - Hardware integration Camera Motion Planner Motion Controller Wheel Drivers Mapping Trajectory Planner Wheel Encoders
17 Tools

18 System Visualisation: rqt_graph

19 Live Plotting: rqt_plot

20 Logging and Visualization Sensor Data: rosbag and rqt_bag
21 3D Visualisation: RVIZ
22 Capabilities

23
24 Ecosystem
25 ROS Statistics July July 2016 Total unique ROS Downloads (.deb files): (143% Increase) Total downloads of ROS.deb files: (158% increase) Total number of papers citing ROS: (46% increase)

26 Worldwide User Base

27 Robots Number of Robots Supporting ROS Year
28
29 Technical Capabilities Motion Planning Fast and good quality paths Kinematic Constraints Fast and flexible collision checking Integrated Kinematics Integrated Perception for Environment Representation Standardised Interfaces to Controllers Execution and Monitoring Kinematic Analysis Simulated Robots Study Material
30 Motion Planning MoveIt! includes a variety of motion planners: Sampling-based motion planners (implementations from [OMPL]) Search-based motion planners (implementations from SBPL) Optimization-based motion planners (CHOMP)
31 Motion Planning - Constraints You can specify the following kinematic constraints: Position constraints restrict the position of a link to lie within a region of space Orientation constraints restrict the orientation of a link to lie within specified roll, pitch or yaw limits Visibility constraints restrict a point on a link to lie within the visibility cone for a particular sensor Joint constraints restrict a joint to lie between two values User-specified constraints you can also specify your own constraints with a user-defined callback. Study Material
32 Collision Detection Flexible Collision Library (FCL) is used. Types of objects supported: Meshes Primitive shapes (boxes, cylinders, cones) Octomap 40,000 to 80,000 collision checks per second! Study Material

33 MoveIt - Robot Setup Assistant
34 MoveIt Capabilities
35 How to use it? To simulate and play around with Universal Robot UR5 1) Have ROS installed (current version: Indigo) 2) Install MoveIt for UR5: sudo apt-get install ros-indigo-ur5-moveit-config 3) Launch UR5 RViz simulator: roslaunch ur5_moveit_config demo.launch That s it! al%20robot%20and%20ros-industrial

36 How to use it?
37 Future? ROS 2 coming soon...




38 Actual Projects: People detection for HMC Joint Human Detection From Static and Mobile Cameras

39 Autonomous Hot Metal Carrier (HMC)
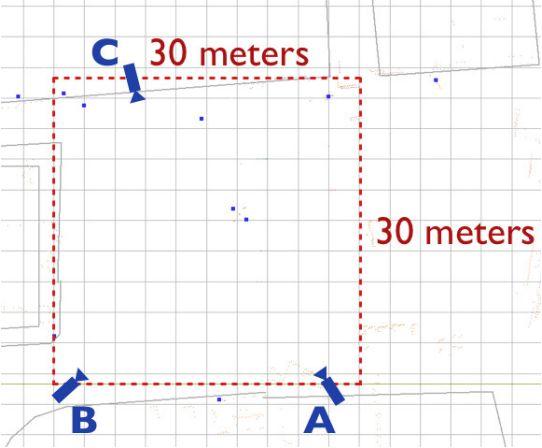

40 Workspace

41 Detection Process

42 Algorithm Diagram
43 Automatic Calibration of Kinect - Robot System Automatic Calibration of a Robot Manipulator and Multi 3D Camera System

44
45 Robot-Based Electric Vehicle Charging Station Work in progress...



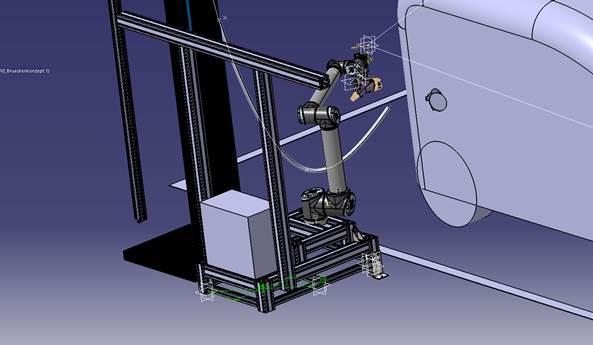
46
47 Summary ROS is a meta-operating system for robotics Provides basic (and many!) algorithms for robotics Modular approach allows easy adaptation to hardware changes and both hw and sw updates Effective visualisation and simulation tools World-wide spread in research and commercial use BSD license - open source, free to use! Over 120 robot platforms support ROS, and growing! Easy to start Linux based, best works on Ubuntu Easy to parallelise, nodes based approach communicate over TCP and can be synchronised using timestamps for messages Study Material
48 Useful URLs - ROS homepage - Is ROS for me? MoveIt - RViz - ROS virtual machine - OpenCV - Point Cloud Library
49 Thank You! Any Questions?
INF Introduction to Robot Operating System
 INF3480 - Introduction to Robot Operating System April 19, 2018 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
INF3480 - Introduction to Robot Operating System April 19, 2018 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
3 Problems You Need to Tackle when Developing Robot Software
 ROS : Robot Operating System RSS Technical Lecture 6 Monday, February 27 th, 2012 Michael Fleder MIT 6-3, MEng, PhD 1 3 Problems You Need to Tackle when Developing Robot Software (1) Sequential programming
ROS : Robot Operating System RSS Technical Lecture 6 Monday, February 27 th, 2012 Michael Fleder MIT 6-3, MEng, PhD 1 3 Problems You Need to Tackle when Developing Robot Software (1) Sequential programming
Overview KMR WS2012/13. ROS Basics. Robot Operating System (ROS) Practical Introduction. Johannes Maurer Clemens Mühlbacher. Master.
 Practical Introduction. Johannes Maurer Clemens Mühlbacher. Master.") KMR WS2012/13 Practical Introduction Overview Johannes Maurer Clemens Mühlbacher Graz University of Technology Graz, October 12th, 2012 1 2 Robot Operating System (ROS) open-source meta-operating system
KMR WS2012/13 Practical Introduction Overview Johannes Maurer Clemens Mühlbacher Graz University of Technology Graz, October 12th, 2012 1 2 Robot Operating System (ROS) open-source meta-operating system
Introduction to ROS Adopted from MIT 4.151
 Introduction to ROS Adopted from MIT 4.151 A meta-operating system for robots Comparison: the PC ecosystem Comparison: the robotics ecosystem Standardized layers System software abstracts hardware Applications
Introduction to ROS Adopted from MIT 4.151 A meta-operating system for robots Comparison: the PC ecosystem Comparison: the robotics ecosystem Standardized layers System software abstracts hardware Applications
Quick Introduction to ROS
 Quick Introduction to ROS ROS is huge ROS is an open-source, meta-operating system for humanoid robots What can ROS do? Hardware abstraction Low-level device control Message passing between nodes Sophisticated
Quick Introduction to ROS ROS is huge ROS is an open-source, meta-operating system for humanoid robots What can ROS do? Hardware abstraction Low-level device control Message passing between nodes Sophisticated
begins halting unexpectedly, doing one or more of the following may improve performance;
 CLEARPATH ROBOTICS F r o m T h e D e s k o f T h e R o b o t s m i t h s Thank you for your Husky A200 order! As part of the integration, we have prepared this quick reference sheet for you and your team
CLEARPATH ROBOTICS F r o m T h e D e s k o f T h e R o b o t s m i t h s Thank you for your Husky A200 order! As part of the integration, we have prepared this quick reference sheet for you and your team
Construction of SCARA robot simulation platform based on ROS
 Construction of SCARA robot simulation platform based on ROS Yingpeng Yang a, Zhaobo Zhuang b and Ruiqi Xu c School of Shandong University of Science and Technology, Shandong 266590, China; ayangyingp1992@163.com,
Construction of SCARA robot simulation platform based on ROS Yingpeng Yang a, Zhaobo Zhuang b and Ruiqi Xu c School of Shandong University of Science and Technology, Shandong 266590, China; ayangyingp1992@163.com,
CS 309: Autonomous Intelligent Robotics FRI I. Lecture 9: Introduction to ROS. Instructor: Justin Hart
 CS 309: Autonomous Intelligent Robotics FRI I Lecture 9: Introduction to ROS Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 1: Due tonight Any
CS 309: Autonomous Intelligent Robotics FRI I Lecture 9: Introduction to ROS Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 1: Due tonight Any
Intern Presentation:
 : Gripper Stereo and Assisted Teleoperation Stanford University December 13, 2010 Outline 1. Introduction 2. Hardware 3. Research 4. Packages 5. Conclusion Introduction Hardware Research Packages Conclusion
: Gripper Stereo and Assisted Teleoperation Stanford University December 13, 2010 Outline 1. Introduction 2. Hardware 3. Research 4. Packages 5. Conclusion Introduction Hardware Research Packages Conclusion
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Shaun Edwards Sr. Research Engineer Southwest Research Institute 1 OVERVIEW 2 Overview Presentation See What Can ROS-I Do Today? presentation 3 INTRODUCTION
ROS-Industrial Basic Developer s Training Class Shaun Edwards Sr. Research Engineer Southwest Research Institute 1 OVERVIEW 2 Overview Presentation See What Can ROS-I Do Today? presentation 3 INTRODUCTION
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 4: More Advanced Topics (Descartes and Perception) Southwest Research Institute 2 MOVEIT! CONTINUED 3 Motion Planning
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 4: More Advanced Topics (Descartes and Perception) Southwest Research Institute 2 MOVEIT! CONTINUED 3 Motion Planning
ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN
 ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN ROBOTICS EVOLUTION SIMPLIFIED! Micro Controller Brain Sumo Line follower Maze solver Firefighting...
ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN ROBOTICS EVOLUTION SIMPLIFIED! Micro Controller Brain Sumo Line follower Maze solver Firefighting...
COMP3431 Robot Software Architectures
 COMP3431 Robot Software Architectures Week 2 ROS Continued David Rajaratnam Click to edit Present s Name ROS Continued What we're doing today: Recap from last week Example of turtlebot setup Frames of
COMP3431 Robot Software Architectures Week 2 ROS Continued David Rajaratnam Click to edit Present s Name ROS Continued What we're doing today: Recap from last week Example of turtlebot setup Frames of
ROS: introduction, concepts and examples
 ROS: introduction, concepts and examples Cédric Pradalier October 16 th, 2013 Objectives of this talk ROS and middleware Quick presentation Quick comparison Use case For teaching For research 2/21 Cédric
ROS: introduction, concepts and examples Cédric Pradalier October 16 th, 2013 Objectives of this talk ROS and middleware Quick presentation Quick comparison Use case For teaching For research 2/21 Cédric
Progress review #3. Gauri Gandhi. Team G Robographers. Teammates: Rohit Dashrathi. Jimit Gandhi. Tiffany May. Sida Wang ILR #4
 Progress review #3 Gauri Gandhi Team G Robographers Teammates: Rohit Dashrathi Jimit Gandhi Tiffany May Sida Wang ILR #4 November 12, 2015 1 a. Individual Progress For the third progress review, I worked
Progress review #3 Gauri Gandhi Team G Robographers Teammates: Rohit Dashrathi Jimit Gandhi Tiffany May Sida Wang ILR #4 November 12, 2015 1 a. Individual Progress For the third progress review, I worked
Introduction to Robot Operating System (ROS)
") Introduction to Robot Operating System (ROS) May 22, 2018 Outline What is ROS? ROS Communication Layer ROS Ecosystem ROS Master ROS Nodes Topics, Services, Actions ROS Packages Catkin build system Libraries/Tools
Introduction to Robot Operating System (ROS) May 22, 2018 Outline What is ROS? ROS Communication Layer ROS Ecosystem ROS Master ROS Nodes Topics, Services, Actions ROS Packages Catkin build system Libraries/Tools
Preface...vii. Printed vs PDF Versions of the Book...ix. 1. Scope of this Volume Installing the ros-by-example Code...3
 Contents Preface...vii Printed vs PDF Versions of the Book...ix 1. Scope of this Volume...1 2. Installing the ros-by-example Code...3 3. Task Execution using ROS...7 3.1 A Fake Battery Simulator...8 3.2
Contents Preface...vii Printed vs PDF Versions of the Book...ix 1. Scope of this Volume...1 2. Installing the ros-by-example Code...3 3. Task Execution using ROS...7 3.1 A Fake Battery Simulator...8 3.2
Course Updates. Website set-up at
 Course Updates Website set-up at https://ae640a.github.io/ Canvas invite (for assignments & submissions) will be sent once course list (after add-drop) is available Attendance: 70% Minimum Last 2 lectures
Course Updates Website set-up at https://ae640a.github.io/ Canvas invite (for assignments & submissions) will be sent once course list (after add-drop) is available Attendance: 70% Minimum Last 2 lectures
ROS-Industrial Basic Developer s Training Class. Southwest Research Institute
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 3: Motion Control of Manipulators Southwest Research Institute 2 URDF: Unified Robot Description Format 3 URDF: Overview
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 3: Motion Control of Manipulators Southwest Research Institute 2 URDF: Unified Robot Description Format 3 URDF: Overview
MoveIt. Release Indigo. MoveIt Motion Planning Framework
 MoveIt Release Indigo MoveIt Motion Planning Framework August 10, 2016 Contents 1 Beginner Tutorials 1 2 Advanced Tutorials 13 3 Configuration Tutorials 23 i ii CHAPTER 1 Beginner Tutorials 1.1 Move Group
MoveIt Release Indigo MoveIt Motion Planning Framework August 10, 2016 Contents 1 Beginner Tutorials 1 2 Advanced Tutorials 13 3 Configuration Tutorials 23 i ii CHAPTER 1 Beginner Tutorials 1.1 Move Group
Introducing MoveIt! First, start the Baxter simulator in Gazebo:
 Introducing MoveIt! One of the challenging aspects of robotics is defining a path for the motion of a robot's arms to grasp an object, especially when obstacles may obstruct the most obvious path of motion.
Introducing MoveIt! One of the challenging aspects of robotics is defining a path for the motion of a robot's arms to grasp an object, especially when obstacles may obstruct the most obvious path of motion.
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots
 A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
A Modular Software Framework for Eye-Hand Coordination in Humanoid Robots Jurgen Leitner, Simon Harding, Alexander Forster and Peter Corke Presentation: Hana Fusman Introduction/ Overview The goal of their
Introduction to the Robot Operating System (ROS)
") - Lisboa Introduction to Robotics 2018/2019 Introduction to the Robot Operating System (ROS) Rodrigo Ventura Instituto Superior Técnico, Universidade de Lisboa rodrigo.ventura@isr.tecnico.ulisboa.pt What
- Lisboa Introduction to Robotics 2018/2019 Introduction to the Robot Operating System (ROS) Rodrigo Ventura Instituto Superior Técnico, Universidade de Lisboa rodrigo.ventura@isr.tecnico.ulisboa.pt What
ROS: Tips n' Tricks. by: Anqi Xu COMP-417, McGill University Monday September 20th, Inspired by presentation of Marek Doniec, MIT
 ROS: Tips n' Tricks by: Anqi Xu COMP-417, McGill University Monday September 20th, 2013 Inspired by presentation of Marek Doniec, MIT Overview What is ROS? Features Philosophies Core elements Development
ROS: Tips n' Tricks by: Anqi Xu COMP-417, McGill University Monday September 20th, 2013 Inspired by presentation of Marek Doniec, MIT Overview What is ROS? Features Philosophies Core elements Development
Winning with MoveIt! Team Delft Amazon Picking Challenge. Mukunda Bharatheesha
 Winning with MoveIt! Team Delft Amazon Picking Challenge Mukunda Bharatheesha 08.10.2016 Self Introduction Stowing Challenge Picking Challenge Delft - 214 Delft 105 (00:00:30) NimbRo - 186 PFN 105 (00:01:07)
Winning with MoveIt! Team Delft Amazon Picking Challenge Mukunda Bharatheesha 08.10.2016 Self Introduction Stowing Challenge Picking Challenge Delft - 214 Delft 105 (00:00:30) NimbRo - 186 PFN 105 (00:01:07)
16-662: Robot Autonomy Project Bi-Manual Manipulation Final Report
 16-662: Robot Autonomy Project Bi-Manual Manipulation Final Report Oliver Krengel, Abdul Zafar, Chien Chih Ho, Rohit Murthy, Pengsheng Guo 1 Introduction 1.1 Goal We aim to use the PR2 robot in the search-based-planning
16-662: Robot Autonomy Project Bi-Manual Manipulation Final Report Oliver Krengel, Abdul Zafar, Chien Chih Ho, Rohit Murthy, Pengsheng Guo 1 Introduction 1.1 Goal We aim to use the PR2 robot in the search-based-planning
EECS 4330/7330 Introduction to Mechatronics and Robotic Vision, Fall Lab 5. Controlling Puma Using Leap Motion Device
 1 Lab 5 Controlling Puma Using Leap Motion Device Objective In this experiment, students will use Leap Motion device to achieve the following goals: - Get familiar with the Leap Motion device - Experience
1 Lab 5 Controlling Puma Using Leap Motion Device Objective In this experiment, students will use Leap Motion device to achieve the following goals: - Get familiar with the Leap Motion device - Experience
Distributed Robotic Architecture
 Distributed Robotic Architecture Using Actin and DDS Justin Keesling Energid Technologies www.energid.com Overview Who is Energid? What is Actin? Actin with DDS Tasking with DDS Projects using DDS Live
Distributed Robotic Architecture Using Actin and DDS Justin Keesling Energid Technologies www.energid.com Overview Who is Energid? What is Actin? Actin with DDS Tasking with DDS Projects using DDS Live
AMR 2011/2012: Final Projects
 AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
Introduction to ROS. Lasse Einig, Dennis Krupke, Florens Wasserfall
 Introduction to ROS Lasse Einig, Dennis Krupke, Florens Wasserfall University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems April 6, 2015 L.
Introduction to ROS Lasse Einig, Dennis Krupke, Florens Wasserfall University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems April 6, 2015 L.
Rosbridge web interface
 CENTER FOR MACHINE PERCEPTION Rosbridge web interface CZECH TECHNICAL UNIVERSITY IN PRAGUE Martin Blaha, Michal Kreč, Petr Marek, Tomáš Nouza, Tadeáš Lejsek blahama7@fel.cvut.cz, krecmich@fel.cvut.cz,
CENTER FOR MACHINE PERCEPTION Rosbridge web interface CZECH TECHNICAL UNIVERSITY IN PRAGUE Martin Blaha, Michal Kreč, Petr Marek, Tomáš Nouza, Tadeáš Lejsek blahama7@fel.cvut.cz, krecmich@fel.cvut.cz,
T. Moulard () ROS tutorial January / 32
 ROS tutorial January / 32") ROS tutorial Thomas Moulard LAAS robotics courses, January 2012 T. Moulard () ROS tutorial January 2012 1 / 32 So what is ROS? A component oriented robotics framework, A development suite, A (bad) package
ROS tutorial Thomas Moulard LAAS robotics courses, January 2012 T. Moulard () ROS tutorial January 2012 1 / 32 So what is ROS? A component oriented robotics framework, A development suite, A (bad) package
ROS : Robot Operating System
 ROS : Robot Operating System Weipeng He 2he@informatik.uni-hamburg.de 5 November, 2012 Outline Introduction Motivation Software Structure Community Conclusion Introduction What is ROS? ROS is Robot Operating
ROS : Robot Operating System Weipeng He 2he@informatik.uni-hamburg.de 5 November, 2012 Outline Introduction Motivation Software Structure Community Conclusion Introduction What is ROS? ROS is Robot Operating
Spring 2016 :: :: Robot Autonomy :: Team 7 Motion Planning for Autonomous All-Terrain Vehicle
 Spring 2016 :: 16662 :: Robot Autonomy :: Team 7 Motion Planning for Autonomous All-Terrain Vehicle Guan-Horng Liu, Samuel Wang, Shu-Kai Lin, Chris Wang, Tiffany May Advisor : Mr. George Kantor OUTLINE
Spring 2016 :: 16662 :: Robot Autonomy :: Team 7 Motion Planning for Autonomous All-Terrain Vehicle Guan-Horng Liu, Samuel Wang, Shu-Kai Lin, Chris Wang, Tiffany May Advisor : Mr. George Kantor OUTLINE
Mobile Robots Robot Operating System (ROS)
") Mobile Robots Robot Operating System (ROS) Institute for Software Technology 1 Motivation Beer me https://www.youtube.com/watch?v=c3cq0sy4tbs 2 Robotics is Easy control behavior perception modelling domain
Mobile Robots Robot Operating System (ROS) Institute for Software Technology 1 Motivation Beer me https://www.youtube.com/watch?v=c3cq0sy4tbs 2 Robotics is Easy control behavior perception modelling domain
CMU Amazon Picking Challenge
 CMU Amazon Picking Challenge Team Harp (Human Assistive Robot Picker) Graduate Developers Abhishek Bhatia Alex Brinkman Lekha Walajapet Feroza Naina Rick Shanor Search Based Planning Lab Maxim Likhachev
CMU Amazon Picking Challenge Team Harp (Human Assistive Robot Picker) Graduate Developers Abhishek Bhatia Alex Brinkman Lekha Walajapet Feroza Naina Rick Shanor Search Based Planning Lab Maxim Likhachev
Gazebo. Amirreza Kabiri Fatemeh Pahlevan Aghababa. Autumn 2017
 Gazebo Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 History Started in fall 2002 in USC by Dr. Andrew Howard and his student Nate Koenig as a complementary simulator to Stage, Nate continue to
Gazebo Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 History Started in fall 2002 in USC by Dr. Andrew Howard and his student Nate Koenig as a complementary simulator to Stage, Nate continue to
ADI Driver Documentation
 ADI Driver Documentation Release 1.9.1 Tokyo Opensource Robotics Kyokai Association Jan 16, 2019 Contents 1 Prerequisite 3 1.1 Install ROS.............................................. 3 1.2 Install adi_driver
ADI Driver Documentation Release 1.9.1 Tokyo Opensource Robotics Kyokai Association Jan 16, 2019 Contents 1 Prerequisite 3 1.1 Install ROS.............................................. 3 1.2 Install adi_driver
ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design
 ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design Emanuele Ruffaldi (SSSA) I. Kostavelis, D. Giakoumis, D. Tzovaras (CERTH) Overview Problem Statement Existing Solutions
ArchGenTool: A System-Independent Collaborative Tool for Robotic Architecture Design Emanuele Ruffaldi (SSSA) I. Kostavelis, D. Giakoumis, D. Tzovaras (CERTH) Overview Problem Statement Existing Solutions
Development of dual arm mobile manipulation systems for small part assembly tasks
 Development of dual arm mobile manipulation systems for small part assembly tasks Alexander Bubeck, Benjamin Maidel, Felipe Garcia Lopez, Lorenz Halt, Alexander Koch ROSCon 2014 Chicago Outline Introduction
Development of dual arm mobile manipulation systems for small part assembly tasks Alexander Bubeck, Benjamin Maidel, Felipe Garcia Lopez, Lorenz Halt, Alexander Koch ROSCon 2014 Chicago Outline Introduction
How I Learned to Stop Reinventing and Love the Wheels. with (home/hackerspace) robotics
 robotics") How I Learned to Stop Reinventing and Love the Wheels 1 or having Andreas FUNBihlmaier with (home/hackerspace) robotics Overview On Reinventing Wheels in Robotics ROS Technical Overview and Concepts Hardware
How I Learned to Stop Reinventing and Love the Wheels 1 or having Andreas FUNBihlmaier with (home/hackerspace) robotics Overview On Reinventing Wheels in Robotics ROS Technical Overview and Concepts Hardware
Algorithmic Robotics and Motion Planning
 Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Algorithmic Robotics and Motion Planning Spring 2018 Introduction Dan Halperin School of Computer Science Tel Aviv University Dolce & Gabbana 2018 handbag collection Today s lesson basic terminology fundamental
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard 1/29 Some examples of mobile robots
Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard 1/29 Some examples of mobile robots
ROS Interfaced Autonomous Control System in the Loop Real time CarMaker simulated sensor data for system under test
 ROS Interfaced Autonomous Control System in the Loop Real time CarMaker simulated sensor data for system under test Graham Lee*, Zaour Raouf, Abdul Nasser Raouf, Jakobus Groenewald and Gunwant Dhadyalla
ROS Interfaced Autonomous Control System in the Loop Real time CarMaker simulated sensor data for system under test Graham Lee*, Zaour Raouf, Abdul Nasser Raouf, Jakobus Groenewald and Gunwant Dhadyalla
Set up and Foundation of the Husky
 Set up and Foundation of the Husky Marisa Warner, Jeremy Gottlieb, Gabriel Elkaim Worcester Polytechnic Institute University of California, Santa Cruz Abstract Clearpath s Husky A200 is an unmanned ground
Set up and Foundation of the Husky Marisa Warner, Jeremy Gottlieb, Gabriel Elkaim Worcester Polytechnic Institute University of California, Santa Cruz Abstract Clearpath s Husky A200 is an unmanned ground
CS283: Robotics Fall 2016: Software
 CS283: Robotics Fall 2016: Software Sören Schwertfeger / 师泽仁 ShanghaiTech University Mobile Robotics ShanghaiTech University - SIST - 18.09.2016 2 Review Definition Robot: A machine capable of performing
CS283: Robotics Fall 2016: Software Sören Schwertfeger / 师泽仁 ShanghaiTech University Mobile Robotics ShanghaiTech University - SIST - 18.09.2016 2 Review Definition Robot: A machine capable of performing
Open Source Software in Robotics and Real-Time Control Systems. Gary Crum at OpenWest 2017
 Open Source Software in Robotics and Real-Time Control Systems Gary Crum at OpenWest 2017 Background and some videos for context ASI history with some open source and USU academic roots: asirobots.com
Open Source Software in Robotics and Real-Time Control Systems Gary Crum at OpenWest 2017 Background and some videos for context ASI history with some open source and USU academic roots: asirobots.com
WORKING WITH BAXTER MOVEIT, PILLAR AND OTHER OBJECTS
 WORKING WITH BAXTER MOVEIT, PILLAR AND OTHER OBJECTS Tom Harman, Carol Fairchild, Louise Li. 3/7/2015 1 Contents FIRST, WATCH THIS VIDEO... 3 See how to run MoveIt and Manipulate Baxter s arms.... 3 TURN
WORKING WITH BAXTER MOVEIT, PILLAR AND OTHER OBJECTS Tom Harman, Carol Fairchild, Louise Li. 3/7/2015 1 Contents FIRST, WATCH THIS VIDEO... 3 See how to run MoveIt and Manipulate Baxter s arms.... 3 TURN
V-REP Robot Simulator as a Validation Tool for Computer Vision
 V-REP Robot Simulator as a Validation Tool for Computer Vision Mirella Pessoa de Melo, Lucas Maggi, Rafael Roberto, João Marcelo Teixeira, Veronica Teichrieb {mspm, lom, rar3, jmxnt, vt}@cin.ufpe.br Summary
V-REP Robot Simulator as a Validation Tool for Computer Vision Mirella Pessoa de Melo, Lucas Maggi, Rafael Roberto, João Marcelo Teixeira, Veronica Teichrieb {mspm, lom, rar3, jmxnt, vt}@cin.ufpe.br Summary
Final Report. Project #19 Service robot simulation: Care-O-bot 4
 Aalto University ELEC-E8002/E8003 Project work course Year 2016 Final Report Project #19 Service robot simulation: Care-O-bot 4 Date: 12.12.2016 Taneli Halme Kimmo Ojala Otto Sirola Jason Toivanen Noora
Aalto University ELEC-E8002/E8003 Project work course Year 2016 Final Report Project #19 Service robot simulation: Care-O-bot 4 Date: 12.12.2016 Taneli Halme Kimmo Ojala Otto Sirola Jason Toivanen Noora
Team Description Paper Team AutonOHM
 Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Teaching Assistant: Roi Yehoshua
 Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Introduction to ROS ROS Main Features ROS Main Concepts Installing ROS Agenda Course Administration Course s home page: http://www.cs.biu.ac.il/~yehoshr1/89-685/
Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Introduction to ROS ROS Main Features ROS Main Concepts Installing ROS Agenda Course Administration Course s home page: http://www.cs.biu.ac.il/~yehoshr1/89-685/
EE-565-Lab2. Dr. Ahmad Kamal Nasir
 EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
ROS: Robot Operating System. Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014
 ROS: Robot Operating System Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014 Overview Features & Philosophies Core elements Development pipeline Useful ROS nodes / tools What
ROS: Robot Operating System Presented by: Anqi Xu COMP-417, McGill University Tuesday September 16th, 2014 Overview Features & Philosophies Core elements Development pipeline Useful ROS nodes / tools What
DETERMINING ACCURACY OF AN ABB IRB1600 MANIPULATOR AND FORMING COMMON REFERENCE FRAME WITH A FARO ARM
 ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA DETERMINING ACCURACY OF AN ABB IRB1600 MANIPULATOR AND FORMING COMMON REFERENCE FRAME WITH A FARO ARM Geoffrey Chiou Dept. of Mechanical
ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA DETERMINING ACCURACY OF AN ABB IRB1600 MANIPULATOR AND FORMING COMMON REFERENCE FRAME WITH A FARO ARM Geoffrey Chiou Dept. of Mechanical
Laser-Camera systems and algorithms to sense the environment for robotic applications
 The research project: FP7-People-Marie Curie- COFUND-Trentino-post-doc 2009 - Incoming Laser-Camera systems and algorithms to sense the environment for robotic applications Presenter: Dr. Ilya Afanasyev
The research project: FP7-People-Marie Curie- COFUND-Trentino-post-doc 2009 - Incoming Laser-Camera systems and algorithms to sense the environment for robotic applications Presenter: Dr. Ilya Afanasyev
moveit Release Indigo
 moveit t utorials Release Indigo November 10, 2016 Contents 1 Beginner 3 2 Advanced 23 3 Integration with New Robot 51 4 Configuration 71 5 Attribution 75 i ii These tutorials will run you through how
moveit t utorials Release Indigo November 10, 2016 Contents 1 Beginner 3 2 Advanced 23 3 Integration with New Robot 51 4 Configuration 71 5 Attribution 75 i ii These tutorials will run you through how
Robot For Assistance. Master Project ME-GY 996. Presented By: Karim Chamaa. Presented To: Dr. Vikram Kapila
 Robot For Assistance Master Project ME-GY 996 Presented By: Karim Chamaa Presented To: Dr. Vikram Kapila Project Description Building a robot with an assistance duty. Goals: Build a cheap and independent
Robot For Assistance Master Project ME-GY 996 Presented By: Karim Chamaa Presented To: Dr. Vikram Kapila Project Description Building a robot with an assistance duty. Goals: Build a cheap and independent
3D Collision Avoidance for Navigation in Unstructured Environments
 3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
3D Collision Avoidance for Navigation in Unstructured Environments Armin Hornung Humanoid Robots Lab, University of Freiburg May 5, 2011 Motivation Personal robots are to operate in arbitrary complex environments:
Introduction to V-REP
 Introduction to V-REP virtuel robot experimentation platform by Mathias Thor This presentation is inspired by the official V-REP presentation and the official website Content V-REP Overview Scene Objects
Introduction to V-REP virtuel robot experimentation platform by Mathias Thor This presentation is inspired by the official V-REP presentation and the official website Content V-REP Overview Scene Objects
APPLICATION NOTE Interfacing Basler Cameras with ROS
 APPLICATION NOTE Interfacing Basler Cameras with ROS Applicable only to cameras that can be accessed by the Basler pylon Camera Software Suite Document Number: AW001491 Version: 01 Language: 000 (English)
APPLICATION NOTE Interfacing Basler Cameras with ROS Applicable only to cameras that can be accessed by the Basler pylon Camera Software Suite Document Number: AW001491 Version: 01 Language: 000 (English)
Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation
 Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation eer Alakshendra Research Scholar Robotics Lab Dr Shital S.Chiddarwar Supervisor Robotics
Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation eer Alakshendra Research Scholar Robotics Lab Dr Shital S.Chiddarwar Supervisor Robotics
Introduction to ROS. COMP3431 Robot Software Architectures
 Introduction to ROS COMP3431 Robot Software Architectures Robot Software Architecture A robot s software has to control a lot of things: 2D/3D Cameras, LIDAR, Microphones, etc Drive motors, Arm motors
Introduction to ROS COMP3431 Robot Software Architectures Robot Software Architecture A robot s software has to control a lot of things: 2D/3D Cameras, LIDAR, Microphones, etc Drive motors, Arm motors
Team Description Paper
 SPQR@Work: Team Description Paper Marco Imperoli, Daniele Evangelista, Valerio Sanelli, Matteo Russo, Alberto Pretto and Daniele Nardi Department of Computer, Control, and Management Engineering Antonio
SPQR@Work: Team Description Paper Marco Imperoli, Daniele Evangelista, Valerio Sanelli, Matteo Russo, Alberto Pretto and Daniele Nardi Department of Computer, Control, and Management Engineering Antonio
E28 FALL 2016 ZUCKER PROJECT 1. Project 1: TurtleBot 2 Programming Basics
 Project 1: TurtleBot 2 Programming Basics OVERVIEW In this lab, you will learn about the Open Source Robotics Foundation ROS software, and get to know your TurtleBot 2 robot. You will also program your
Project 1: TurtleBot 2 Programming Basics OVERVIEW In this lab, you will learn about the Open Source Robotics Foundation ROS software, and get to know your TurtleBot 2 robot. You will also program your
MARA. Modular collaborative robot, product specification. Electrical characteristics. Software characteristics. Motion characteristics
 MARA Modular collaborative robot, product specification Electrical characteristics Power input 100-230Vac, 50-60Hz. Nominal power consumption
MARA Modular collaborative robot, product specification Electrical characteristics Power input 100-230Vac, 50-60Hz. Nominal power consumption
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration
 Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Manipulating a Large Variety of Objects and Tool Use in Domestic Service, Industrial Automation, Search and Rescue, and Space Exploration Sven Behnke Computer Science Institute VI Autonomous Intelligent
Optimization Motion Planning with TrajOpt and Tesseract for Industrial Applications
 Optimization Motion Planning with TrajOpt and Tesseract for Industrial Applications Levi Armstrong and Jonathan Meyer Southwest Research Institute 30 September, 2018 14 June, 2016 Background TrajOpt History
Optimization Motion Planning with TrajOpt and Tesseract for Industrial Applications Levi Armstrong and Jonathan Meyer Southwest Research Institute 30 September, 2018 14 June, 2016 Background TrajOpt History
Intelligent Robots Seminar
 Intelligent Robots Seminar Topic: Robotics Software Architectures 11/18/2013 Anton Kiggundu Msc. IAS 1 Outline 1. Background Description of Robotic Software Architecture 2. What is Robot Operating System?
Intelligent Robots Seminar Topic: Robotics Software Architectures 11/18/2013 Anton Kiggundu Msc. IAS 1 Outline 1. Background Description of Robotic Software Architecture 2. What is Robot Operating System?
A framework for vision-guided trajectory generation with a 7 DOF robot arm
 A framework for vision-guided trajectory generation with a 7 DOF robot arm Jonathan Scholz, Venkata Subramanian, and Arun Kumar Elangovan Project Report - Robot Intelligence - Planning in Action Faculty
A framework for vision-guided trajectory generation with a 7 DOF robot arm Jonathan Scholz, Venkata Subramanian, and Arun Kumar Elangovan Project Report - Robot Intelligence - Planning in Action Faculty
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Team Description Paper
 SPQR@Work: Team Description Paper Marco Imperoli, Daniele Evangelista, Valerio Sanelli, Matteo Russo, Wilson Villa, Alberto Pretto, and Daniele Nardi Department of Computer, Control and Management Engineering
SPQR@Work: Team Description Paper Marco Imperoli, Daniele Evangelista, Valerio Sanelli, Matteo Russo, Wilson Villa, Alberto Pretto, and Daniele Nardi Department of Computer, Control and Management Engineering
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
YDLIDAR F4PRO USER MANUAL
 YDLIDAR F4PRO USER MANUAL Doc #:01.13.000033 文档编码 :01.13.000008 CONTENTS YDLIDAR F4PRO Development Kit... 2 Development Kit... 2 Windows Instructions... 3 Device connection... 3 Driver Installation...
YDLIDAR F4PRO USER MANUAL Doc #:01.13.000033 文档编码 :01.13.000008 CONTENTS YDLIDAR F4PRO Development Kit... 2 Development Kit... 2 Windows Instructions... 3 Device connection... 3 Driver Installation...
Zürich. Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza. ETH Master Course: L Autonomous Mobile Robots Summary
 Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
Roland Siegwart Margarita Chli Martin Rufli Davide Scaramuzza ETH Master Course: 151-0854-00L Autonomous Mobile Robots Summary 2 Lecture Overview Mobile Robot Control Scheme knowledge, data base mission
getting started with usarsim Amirreza Kabiri Fatemeh Pahlevan Autumn 2017
 getting started with usarsim Amirreza Kabiri Fatemeh Pahlevan Autumn 2017 Outline Intro Requirements Installation Installation problems How to setup How to use Robots Intro USARSim was the first server
getting started with usarsim Amirreza Kabiri Fatemeh Pahlevan Autumn 2017 Outline Intro Requirements Installation Installation problems How to setup How to use Robots Intro USARSim was the first server
Sheet 2 Topic: Motion Models and Robot Odometry
 Visual Navigation for Flying Robots Computer Vision Group D. Cremers, J. Sturm, N. Engelhard Institut für Informatik Summer Term 2012 Technische Universität München Sheet 2 Topic: Motion Models and Robot
Visual Navigation for Flying Robots Computer Vision Group D. Cremers, J. Sturm, N. Engelhard Institut für Informatik Summer Term 2012 Technische Universität München Sheet 2 Topic: Motion Models and Robot
Mobile Manipulation for the KUKA youbot Platform. A Major Qualifying Project Report. submitted to the Faculty. of the WORCESTER POLYTECHNIC INSTITUTE
 Mobile Manipulation for the KUKA youbot Platform A Major Qualifying Project Report submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree
Mobile Manipulation for the KUKA youbot Platform A Major Qualifying Project Report submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree
Spring 2016, Robot Autonomy, Final Report (Team 7) Motion Planning for Autonomous All-Terrain Vehicle
 Motion Planning for Autonomous All-Terrain Vehicle") Spring 2016, 16662 Robot Autonomy, Final Report (Team 7) Motion Planning for Autonomous All-Terrain Vehicle Guan-Horng Liu 1, Samuel Wang 1, Shu-Kai Lin 1, Chris Wang 2, and Tiffany May 1 Advisors: Mr.
Spring 2016, 16662 Robot Autonomy, Final Report (Team 7) Motion Planning for Autonomous All-Terrain Vehicle Guan-Horng Liu 1, Samuel Wang 1, Shu-Kai Lin 1, Chris Wang 2, and Tiffany May 1 Advisors: Mr.
Formation Control of Crazyflies
 Formation Control of Crazyflies Bryce Mack, Chris Noe, and Trevor Rice Advisors: Dr. Ahn, Dr. Wang November 30, 2017 1 Table of Contents 1. 2. 3. Introduction Problem Statement Research Tasks I. II. III.
Formation Control of Crazyflies Bryce Mack, Chris Noe, and Trevor Rice Advisors: Dr. Ahn, Dr. Wang November 30, 2017 1 Table of Contents 1. 2. 3. Introduction Problem Statement Research Tasks I. II. III.
LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup
 FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
FZI RESEARCH CENTER FOR INFORMATION TECHNOLOGY LAUROPE Six Legged Walking Robot for Planetary Exploration participating in the SpaceBot Cup ASTRA 2015, ESA/ESTEC, Noordwijk 12. Mai 2015 Outline SpaceBot
Introduction to the Robot Operating System (ROS) Middleware
 Middleware") Introduction to the Robot Operating System (ROS) Middleware Mike Anderson Chief Scientist The PTR Group, LLC. mailto: mike@theptrgroup.com http://www.theptrgroup.com What We Will Talk About What is ROS?
Introduction to the Robot Operating System (ROS) Middleware Mike Anderson Chief Scientist The PTR Group, LLC. mailto: mike@theptrgroup.com http://www.theptrgroup.com What We Will Talk About What is ROS?
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
YDLIDAR G4 USER MANUAL
 YDLIDAR G4 USER MANUAL Doc#:01.13.000009 文档编码 :01.13.000008 CONTENTS YDLIDAR G4 Development Kit... 2 Development kit... 2 Usage under WINDOWS... 2 Device connection... 2 Driver Installation... 3 Evaluation
YDLIDAR G4 USER MANUAL Doc#:01.13.000009 文档编码 :01.13.000008 CONTENTS YDLIDAR G4 Development Kit... 2 Development kit... 2 Usage under WINDOWS... 2 Device connection... 2 Driver Installation... 3 Evaluation
Lab 2A Finding Position and Interpolation with Quaternions
 Lab 2A Finding Position and Interpolation with Quaternions In this Lab we will learn how to use the RVIZ Robot Simulator, Python Programming Interpreter and ROS tf library to study Quaternion math. There
Lab 2A Finding Position and Interpolation with Quaternions In this Lab we will learn how to use the RVIZ Robot Simulator, Python Programming Interpreter and ROS tf library to study Quaternion math. There
irobot Create Setup with ROS and Implement Odometeric Motion Model
 irobot Create Setup with ROS and Implement Odometeric Motion Model Welcome Lab 4 Dr. Ahmad Kamal Nasir 18.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to irobot-create Hardware Communication
irobot Create Setup with ROS and Implement Odometeric Motion Model Welcome Lab 4 Dr. Ahmad Kamal Nasir 18.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to irobot-create Hardware Communication
Comparative Study of Potential Field and Sampling Algorithms for Manipulator Obstacle Avoidance
 IJCTA, 9(33), 2016, pp. 71-78 International Science Press Closed Loop Control of Soft Switched Forward Converter Using Intelligent Controller 71 Comparative Study of Potential Field and Sampling Algorithms
IJCTA, 9(33), 2016, pp. 71-78 International Science Press Closed Loop Control of Soft Switched Forward Converter Using Intelligent Controller 71 Comparative Study of Potential Field and Sampling Algorithms
Robotino - The Mobile Mechatronics Learning System
 Robotino - The Mobile Mechatronics Learning System Robotino 2 The new version PROLOG Integration of Robotino as an intelligent AGV in a MPS learning factory. Vocational training equipment for Robotino
Robotino - The Mobile Mechatronics Learning System Robotino 2 The new version PROLOG Integration of Robotino as an intelligent AGV in a MPS learning factory. Vocational training equipment for Robotino
The Problem. Robotics is a huge and growing area: research, innovation Lack of standards for robotics. Programming Robots with ROS
 ROS Introduction Main concepts Basic commands Borrowed extensively from: Roi Yehoshua, BIU The Problem Robotics is a huge and growing area: research, innovation Lack of standards for robotics (C)2016 Roi
ROS Introduction Main concepts Basic commands Borrowed extensively from: Roi Yehoshua, BIU The Problem Robotics is a huge and growing area: research, innovation Lack of standards for robotics (C)2016 Roi
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL
 OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
Robotics 2 Information
 Robotics 2 Information Prof. Alessandro De Luca Robotics 2! 2017/18! Second semester! Monday, February 26 Wednesday, May 30, 2018! Courses of study (code)! Master in Artificial Intelligence and Robotics
Robotics 2 Information Prof. Alessandro De Luca Robotics 2! 2017/18! Second semester! Monday, February 26 Wednesday, May 30, 2018! Courses of study (code)! Master in Artificial Intelligence and Robotics
Flying Penguins. Embedded Linux applications for autonomous UAVs
 Flying Penguins Embedded Linux applications for autonomous UAVs Clay McClure github.com/claymation Roadmap UAV MAV Link mavros Your App ROS Linux autopilot autopilots autopilots RC input motor mixing
Flying Penguins Embedded Linux applications for autonomous UAVs Clay McClure github.com/claymation Roadmap UAV MAV Link mavros Your App ROS Linux autopilot autopilots autopilots RC input motor mixing
University of Twente
 University of Twente Mechanical Automation Group Robotic Seam Teaching and Laser Welding Dimitrios Iakovou Johan Meijer November 2006 Contents 3 Contents 1) Task Description 5 2) SurfNet Breeze 2.1) Introduction
University of Twente Mechanical Automation Group Robotic Seam Teaching and Laser Welding Dimitrios Iakovou Johan Meijer November 2006 Contents 3 Contents 1) Task Description 5 2) SurfNet Breeze 2.1) Introduction
Lecture «Robot Dynamics»: Introduction
 Lecture «Robot Dynamics»: Introduction 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG G1 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Introduction 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG G1 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Equipment use workshop How to use the sweet-pepper harvester
 Equipment use workshop How to use the sweet-pepper harvester Jochen Hemming (Wageningen UR) September-2014 Working environment robot Environmental conditions Temperature: 13 to 35 C Relative Humidity:
Equipment use workshop How to use the sweet-pepper harvester Jochen Hemming (Wageningen UR) September-2014 Working environment robot Environmental conditions Temperature: 13 to 35 C Relative Humidity:
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard olivier. 1/22 What is a robot? Robot
Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard olivier. 1/22 What is a robot? Robot
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
DARPA Investments in GEO Robotics
 DARPA Investments in GEO Robotics Carl Glen Henshaw, Ph.D. Signe Redfield, Ph.D. Naval Center for Space Technology U.S. Naval Research Laboratory Washington, DC 20375 May 22, 2015 Introduction Program
DARPA Investments in GEO Robotics Carl Glen Henshaw, Ph.D. Signe Redfield, Ph.D. Naval Center for Space Technology U.S. Naval Research Laboratory Washington, DC 20375 May 22, 2015 Introduction Program
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 1 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 20.02.2017 1 Overview Course 1 ROS architecture & philosophy
Programming for Robotics Introduction to ROS Course 1 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 20.02.2017 1 Overview Course 1 ROS architecture & philosophy
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential