Gazebo. Amirreza Kabiri Fatemeh Pahlevan Aghababa. Autumn 2017
|
|
|
- Caren Weaver
- 5 years ago
- Views:
Transcription
1 Gazebo Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017
2 History Started in fall 2002 in USC by Dr. Andrew Howard and his student Nate Koenig as a complementary simulator to Stage, Nate continue to develop during his PhD In 2009, John Hsu from Willow integrate ROS and PR2 into Gazebo In 2011 Willow Garage started financial support In 2012 OSRF became steward of project In July 2013 OSRF used gazebo in Virtual Robotics Challenge and DARPA Robotics Challenge
3 About It is licensed under Apache 2.0 It uses MAJOR.MINOR.PATCH versioning system Major when incompatible Minot when functionality changes with b/w compatibility Patch when b/w compatible bug fixes release It uses Tick-tock Release Cycle
4 Features Dynamics Simulation (Access multiple high-performance physics engines including ODE, Bullet, Simbody, and DART.) Advanced 3D Graphics (Utilizing OGRE, Gazebo provides realistic rendering of environments including high-quality lighting, shadows, and textures.) Sensors and Noise (Generate sensor data, optionally with noise, from laser range finders, 2D/3D cameras, Kinect style sensors, contact sensors, forcetorque, and more.) Plugins (Develop custom plugins for robot, sensor, and environmental control. Plugins provide direct access to Gazebo's API.)
5 Features Robot Models (Many robots are provided including PR2, Pioneer2 DX, irobot Create, and TurtleBot. Or build your own using SDF.) TCP/IP Transport (Run simulation on remote servers, and interface to Gazebo through socket-based message passing using Google Protobufs.) Cloud Simulation (Use CloudSim to run Gazebo on Amazon, Softlayer, or your own OpenStack instance.) Command Line Tools (Extensive command line tools facilitate simulation introspection and control.)
6 Installation Instructions to install Gazebo on all the platforms supported: Ubuntu, Debian, Fedora, Arch, Gentoo, Mac, Windows is still under development. Installation on Ubuntu One line From repository
7 Run Gazebo! Gazebo Architecture Run Gazebo with a robot (SDF file (Simulation Description Format)) Where are the worlds located? Client and server separation gzserver gzclient(qt based)
8 Environment Variables GAZEBO_MODEL_PATH: colon-separated set of directories where Gazebo will search for models GAZEBO_RESOURCE_PATH: colon-separated set of directories where Gazebo will search for other resources such as world and media files. GAZEBO_MASTER_URI: URI of the Gazebo master. This specifies the IP and port where the server will be started and tells the clients where to connect to. GAZEBO_PLUGIN_PATH: colon-separated set of directories where Gazebo will search for the plugin shared libraries at runtime. GAZEBO_MODEL_DATABASE_URI: URI of the online model database where Gazebo will download models from.
9 Environment Variables These default values are stored in source <install_path>/share/gazebo/setup.sh gzserver worlds/empty.world Example of loading a plugin on the command line: gzserver -s <plugin_filename> <world_file> The same mechanism is used by the graphical client: gzclient -g <plugin_filename>
10 Communication Communication Between Processes Google Protobuf for the message serializationand boost::asio for the transport mechanism Gazebo Master This is essentially a topic name server. It provides namelookup, and topic management. A single master can handle multiple physics simulations, sensor generators, and GUIs. Communication Library Dependencies: Protobuf and boost::asio External API: Internal API: None Advertised Topics: None Subscribed Topics: None It currently supports only publish/subscribe
11 Physics Library Dependencies: Dynamics engine (with internal collision detection) External API: Provides a simple and generic interface to physics simulation Internal API: Defines a fundamental interface to the physics library for 3rd party dynamic engines. The physics library provides a simple and generic interface to fundamental simulation components, including rigid bodies, collision shapes, and joints for representing articulation constraints.
12 Rendering Library Dependencies: OGRE External API: Allows for loading, initialization, and scene creation Internal API: Store metadata for visualization, call the OGRE API for rendering. The rendering library uses OGRE to provide a simple interface for rendering 3D scenes to both the GUI and sensor libraries. It includes lighting, textures, and sky simulation. It is possible to write plugins for the rendering engine.
13 Sensor Generation Dependencies: Rendering Library, Physics Library External API: Provide functionality to initialize and run a set of sensors Internal API: TBD The sensor generation library implements all the various types of sensors, listens to world state updates from a physics simulator and produces output specified by the instantiated sensors.
14 GUI Dependencies: Rendering Library, Qt External API: None Internal API: None The GUI library uses Qt to create graphical widgets for users to interact with the simulation. The user may control the flow of time by pausing or changing time step size via GUI widgets. The user may also modify the scene by adding, modifying, or removing models. Additionally there are some tools for visualizing and logging simulated sensor data.
15 More.. Plugins The physics, sensor, and rendering libraries support plugins. These plugins provide users with access to the respective libraries without using the communication system. Capture screenshots The captured image will be saved to ~/.gazebo/pictures with a timestamped filename. Amirreza Kabiri & Fatemeh Autumn 2017
16 Build Robot The Model Database Repository The model database is a bitbucket repository Model.config <?xml version="1.0"?> <model> <name>my Model Name</name> <version>1.0</version> <sdf version='1.5'>model.sdf</sdf> <author> <name>my name</name> < >name@ .address</ > </author> <description> A description of the model </description> </model>
17 SDF (Simulation Description Format) Components of a SDF Models Links:A link contains the physical properties of one body of the model. This can be a wheel, or a link in a joint chain. Each link may contain many collision and visual elements. Try to reduce the number of links in your models in order to improve performance and stability. Collision: A collision element encapsulates a geometry that is used to collision checking. This can be a simple shape (which is preferred), or a triangle mesh (which consumes greater resources). A link may contain many collision elements. Visual: A visual element is used to visualize parts of a link. A link may contain 0 or more visual elements.
18 SDF(Simulation Description Format) Inertial: The inertial element describes the dynamic properties of the link, such as mass and rotational inertia matrix. Sensor: A sensor collects data from the world for use in plugins. A link may contain 0 or more sensors. Joints: A joint connects two links. A parent and child relationship is established along with other parameters such as axis of rotation, and joint limits. Plugins: A plugin is a shared library created by a third party to control a model
19 Make a Mobile Robot Setup your model directory Read through the Model Database documentation. You will be creating your own model, which must follow the formatting rules for the Gazebo Model Database directory structure. 1. Create a model directory mkdir -p ~/.gazebo/models/my_robot 2. Create a model config file gedit ~/.gazebo/models/my_robot/model.config <?xml version="1.0"?> <model> <name>my Robot</name> <version>1.0</version> <sdf version='1.4'>model.sdf</sdf> <author> <name>my Name</name> < >me@my. </ > </author> <description> My awesome robot. </description> </model>
20 Make a Mobile Robot 3.create model.sdf file ~/.gazebo/models/my_robot/model.sdf gedit ~/.gazebo/models/my_robot/model.sdf <?xml version='1.0'?> <sdf version='1.4'> <model name="my_robot"> </model> </sdf> Build the Model's Structure This step will create a rectangular base with two wheels. It is important to start simple, and build up a model in steps. The first step is to layout the basic shapes of the model. To do this we will make our model static, which means it will be ignored by the physics engine. As a result the model will stay in one place and allow us to properly align all the components.

21 Make a Mobile Robot Amirreza Kabiri & Fatemeh Autumn Make the model static by adding a <static>true</static> element to the ~/.gazebo/models/my_robot/model.sdf file:
22 Make a Mobile Robot Amirreza Kabiri & Fatemeh Autumn Add the rectangular base by editing the ~/.gazebo/models/my_robot/model.sdf file:
23 ROS Integration Amirreza Kabiri & Fatemeh Autumn 2017 To achieve ROS integration with stand-alone Gazebo, a set of ROS packages named gazebo_ros_pkgs provides wrappers around the standalone Gazebo. They provide the necessary interfaces to simulate a robot in Gazebo using ROS messages, services and dynamic reconfigure Some features of gazebo_ros_pkgs: Supports a stand alone system dependency of Gazebo, that has no ROS bindings on its own Builds with catkin Treats URDF and SDF as equally as possible Reduces code duplication with Gazebo Improves out of the box support for controllers using ros_control Integrates real time controller efficiency improvements from the DARPA Robotics Challenge Cleans up old code from previous versions of ROS and Gazebo
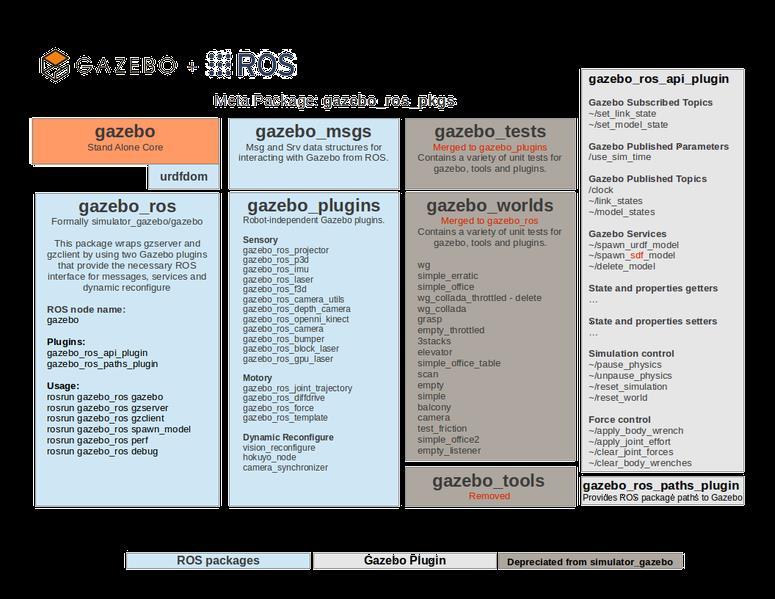

24 gazebo_ros_pkgs interface
25 Running Gazebo The names of the ROS nodes to launch Gazebo have changed slightly to coincide with the Gazebo executable names: rosrun gazebo_ros gazebo launch both the Gazebo server and GUI. rosrun gazebo_ros gzclient launch the Gazebo GUI. rosrun gazebo_ros gzserver launch the Gazebo server. Available nodes to run: rosrun gazebo_ros gazebo rosrun gazebo_ros gzserver rosrun gazebo_ros gzclient rosrun gazebo_ros spawn_model rosrun gazebo_ros perf rosrun gazebo_ros debug
26 Using roslaunch to Open World Models The roslaunch tool is the standard method for starting ROS nodes and bringing up robots in ROS. To start an empty Gazebo world similar to the rosrun command in the previous tutorial, simply run roslaunch gazebo_ros empty_world.launch roslaunch Arguments You can append the following arguments to the launch files to change the behavior of Gazebo: Paused: Start Gazebo in a paused state (default false) use_sim_time: Tells ROS nodes asking for time to get the Gazebo-published simulation time, published over the ROS topic /clock (default true) Gui: Launch the user interface window of Gazebo (default true) Headless: Disable any function calls to simulator rendering (Ogre) components. Does not work with gui:=true (default false) Debug: Start gzserver (Gazebo Server) in debug mode using gdb (default false)
27 Roslaunch command Amirreza Kabiri & Fatemeh Autumn 2017 Normally the default values for these arguments are all you need, but just as an example: roslaunch gazebo_ros empty_world.launch paused:=true use_sim_time:=false gui:=true throttled:=false headless:=false debug:=true Launching Other Demo Worlds Other demo worlds are already included in the gazebo_ros package, including: roslaunch gazebo_ros willowgarage_world.launch roslaunch gazebo_ros mud_world.launch roslaunch gazebo_ros shapes_world.launch roslaunch gazebo_ros rubble_world.launch
John Hsu Nate Koenig ROSCon 2012
 John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
John Hsu Nate Koenig ROSCon 2012 Outline What is Gazebo, and why should you use it Overview and architecture Environment modeling Robot modeling Interfaces Getting Help Simulation for Robots Towards accurate
EE-565-Lab2. Dr. Ahmad Kamal Nasir
 EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
ABOUT ME. Gianluca Bardaro, PhD student in Robotics Contacts: Research field: goo.gl/dbwhhc.
 ABOUT ME Gianluca Bardaro, PhD student in Robotics Contacts: gianluca.bardaro@polimi.it 02 2399 3565 Research field: Formal approach to robot development Robot and robot architecture models Robot simulation
ABOUT ME Gianluca Bardaro, PhD student in Robotics Contacts: gianluca.bardaro@polimi.it 02 2399 3565 Research field: Formal approach to robot development Robot and robot architecture models Robot simulation
ABOUT ME. Gianluca Bardaro, PhD student in Robotics Contacts: Research field:
 ABOUT ME Gianluca Bardaro, PhD student in Robotics Contacts: gianluca.bardaro@polimi.it 02 2399 3565 Research field: Formal approach to robot development Robot and robot architecture models Robot simulation
ABOUT ME Gianluca Bardaro, PhD student in Robotics Contacts: gianluca.bardaro@polimi.it 02 2399 3565 Research field: Formal approach to robot development Robot and robot architecture models Robot simulation
3D Simulation in ROS. Mihai Emanuel Dolha Intelligent Autonomous Systems Technische Universität München. November 4, 2010
 in ROS Intelligent Autonomous Systems Technische Universität München Outline 1. Introduction 2. Gazebo 3. Gazebo in ROS 4. Examples Outline 1. Introduction 2. Gazebo 3. Gazebo in ROS 4. Examples Why do
in ROS Intelligent Autonomous Systems Technische Universität München Outline 1. Introduction 2. Gazebo 3. Gazebo in ROS 4. Examples Outline 1. Introduction 2. Gazebo 3. Gazebo in ROS 4. Examples Why do
Robocup In summary. Amirreza Kabiri Fatemeh Pahlevan Aghababa
 Robocup 2017 In summary Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Outline Models Hardware Specifications Software Specifications Game Field Specifications RoboCup2017RVRL_Demo Repository How
Robocup 2017 In summary Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Outline Models Hardware Specifications Software Specifications Game Field Specifications RoboCup2017RVRL_Demo Repository How
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 1 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 20.02.2017 1 Overview Course 1 ROS architecture & philosophy
Programming for Robotics Introduction to ROS Course 1 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 20.02.2017 1 Overview Course 1 ROS architecture & philosophy
getting started with usarsim Amirreza Kabiri Fatemeh Pahlevan Autumn 2017
 getting started with usarsim Amirreza Kabiri Fatemeh Pahlevan Autumn 2017 Outline Intro Requirements Installation Installation problems How to setup How to use Robots Intro USARSim was the first server
getting started with usarsim Amirreza Kabiri Fatemeh Pahlevan Autumn 2017 Outline Intro Requirements Installation Installation problems How to setup How to use Robots Intro USARSim was the first server
Preface...vii. Printed vs PDF Versions of the Book...ix. 1. Scope of this Volume Installing the ros-by-example Code...3
 Contents Preface...vii Printed vs PDF Versions of the Book...ix 1. Scope of this Volume...1 2. Installing the ros-by-example Code...3 3. Task Execution using ROS...7 3.1 A Fake Battery Simulator...8 3.2
Contents Preface...vii Printed vs PDF Versions of the Book...ix 1. Scope of this Volume...1 2. Installing the ros-by-example Code...3 3. Task Execution using ROS...7 3.1 A Fake Battery Simulator...8 3.2
Quick Introduction to ROS
 Quick Introduction to ROS ROS is huge ROS is an open-source, meta-operating system for humanoid robots What can ROS do? Hardware abstraction Low-level device control Message passing between nodes Sophisticated
Quick Introduction to ROS ROS is huge ROS is an open-source, meta-operating system for humanoid robots What can ROS do? Hardware abstraction Low-level device control Message passing between nodes Sophisticated
Introduction to the Robot Operating System (ROS) Middleware
 Middleware") Introduction to the Robot Operating System (ROS) Middleware Mike Anderson Chief Scientist The PTR Group, LLC. mailto: mike@theptrgroup.com http://www.theptrgroup.com What We Will Talk About What is ROS?
Introduction to the Robot Operating System (ROS) Middleware Mike Anderson Chief Scientist The PTR Group, LLC. mailto: mike@theptrgroup.com http://www.theptrgroup.com What We Will Talk About What is ROS?
Introduction to Robot Operating System (ROS)
") Introduction to Robot Operating System (ROS) May 22, 2018 Outline What is ROS? ROS Communication Layer ROS Ecosystem ROS Master ROS Nodes Topics, Services, Actions ROS Packages Catkin build system Libraries/Tools
Introduction to Robot Operating System (ROS) May 22, 2018 Outline What is ROS? ROS Communication Layer ROS Ecosystem ROS Master ROS Nodes Topics, Services, Actions ROS Packages Catkin build system Libraries/Tools
ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN
 ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN ROBOTICS EVOLUTION SIMPLIFIED! Micro Controller Brain Sumo Line follower Maze solver Firefighting...
ROBOT OPERATING SYSTEM AN INTRODUCTION BY SYED MUHAMMAD ABBAS LUMS SCHOOL OF SCIENCE & ENGINEERING, PAKISTAN ROBOTICS EVOLUTION SIMPLIFIED! Micro Controller Brain Sumo Line follower Maze solver Firefighting...
Construction of SCARA robot simulation platform based on ROS
 Construction of SCARA robot simulation platform based on ROS Yingpeng Yang a, Zhaobo Zhuang b and Ruiqi Xu c School of Shandong University of Science and Technology, Shandong 266590, China; ayangyingp1992@163.com,
Construction of SCARA robot simulation platform based on ROS Yingpeng Yang a, Zhaobo Zhuang b and Ruiqi Xu c School of Shandong University of Science and Technology, Shandong 266590, China; ayangyingp1992@163.com,
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 3 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 24.02.2017 1 Course Structure Course 1 Course 2 Course 3
Programming for Robotics Introduction to ROS Course 3 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 24.02.2017 1 Course Structure Course 1 Course 2 Course 3
Robot Programming with Lisp
 7. Coordinate Transformations, TF, ActionLib Institute for Artificial University of Bremen Outline Coordinate Transformations TF ActionLib 2 Outline Coordinate Transformations TF ActionLib 3 Poses in 3D
7. Coordinate Transformations, TF, ActionLib Institute for Artificial University of Bremen Outline Coordinate Transformations TF ActionLib 2 Outline Coordinate Transformations TF ActionLib 3 Poses in 3D
3 Problems You Need to Tackle when Developing Robot Software
 ROS : Robot Operating System RSS Technical Lecture 6 Monday, February 27 th, 2012 Michael Fleder MIT 6-3, MEng, PhD 1 3 Problems You Need to Tackle when Developing Robot Software (1) Sequential programming
ROS : Robot Operating System RSS Technical Lecture 6 Monday, February 27 th, 2012 Michael Fleder MIT 6-3, MEng, PhD 1 3 Problems You Need to Tackle when Developing Robot Software (1) Sequential programming
How I Learned to Stop Reinventing and Love the Wheels. with (home/hackerspace) robotics
 robotics") How I Learned to Stop Reinventing and Love the Wheels 1 or having Andreas FUNBihlmaier with (home/hackerspace) robotics Overview On Reinventing Wheels in Robotics ROS Technical Overview and Concepts Hardware
How I Learned to Stop Reinventing and Love the Wheels 1 or having Andreas FUNBihlmaier with (home/hackerspace) robotics Overview On Reinventing Wheels in Robotics ROS Technical Overview and Concepts Hardware
SDFusion. Release 0.0.
 SDFusion Release 0.0. Nov 12, 2017 Usage and Installation 1 Relevant Background Information and Pre-Requisits 3 2 Requirements Overview 5 i ii This project provides an exporter for Autodesk Fusion 360
SDFusion Release 0.0. Nov 12, 2017 Usage and Installation 1 Relevant Background Information and Pre-Requisits 3 2 Requirements Overview 5 i ii This project provides an exporter for Autodesk Fusion 360
CS 309: Autonomous Intelligent Robotics FRI I. Lecture 9: Introduction to ROS. Instructor: Justin Hart
 CS 309: Autonomous Intelligent Robotics FRI I Lecture 9: Introduction to ROS Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 1: Due tonight Any
CS 309: Autonomous Intelligent Robotics FRI I Lecture 9: Introduction to ROS Instructor: Justin Hart http://justinhart.net/teaching/2018_spring_cs309/ A couple of quick notes Homework 1: Due tonight Any
COMP3431 Robot Software Architectures
 COMP3431 Robot Software Architectures Week 2 ROS Continued David Rajaratnam Click to edit Present s Name ROS Continued What we're doing today: Recap from last week Example of turtlebot setup Frames of
COMP3431 Robot Software Architectures Week 2 ROS Continued David Rajaratnam Click to edit Present s Name ROS Continued What we're doing today: Recap from last week Example of turtlebot setup Frames of
EECS 4330/7330 Introduction to Mechatronics and Robotic Vision, Fall Lab 5. Controlling Puma Using Leap Motion Device
 1 Lab 5 Controlling Puma Using Leap Motion Device Objective In this experiment, students will use Leap Motion device to achieve the following goals: - Get familiar with the Leap Motion device - Experience
1 Lab 5 Controlling Puma Using Leap Motion Device Objective In this experiment, students will use Leap Motion device to achieve the following goals: - Get familiar with the Leap Motion device - Experience
Introduction to ROS. Lasse Einig, Dennis Krupke, Florens Wasserfall
 Introduction to ROS Lasse Einig, Dennis Krupke, Florens Wasserfall University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems April 6, 2015 L.
Introduction to ROS Lasse Einig, Dennis Krupke, Florens Wasserfall University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Technical Aspects of Multimodal Systems April 6, 2015 L.
INF Introduction to Robot Operating System
 INF3480 - Introduction to Robot Operating System February 22, 2017 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
INF3480 - Introduction to Robot Operating System February 22, 2017 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
ROS-Industrial Basic Developer s Training Class. Southwest Research Institute
 ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 3: Motion Control of Manipulators Southwest Research Institute 2 URDF: Unified Robot Description Format 3 URDF: Overview
ROS-Industrial Basic Developer s Training Class Southwest Research Institute 1 Session 3: Motion Control of Manipulators Southwest Research Institute 2 URDF: Unified Robot Description Format 3 URDF: Overview
Introduction to ROS Adopted from MIT 4.151
 Introduction to ROS Adopted from MIT 4.151 A meta-operating system for robots Comparison: the PC ecosystem Comparison: the robotics ecosystem Standardized layers System software abstracts hardware Applications
Introduction to ROS Adopted from MIT 4.151 A meta-operating system for robots Comparison: the PC ecosystem Comparison: the robotics ecosystem Standardized layers System software abstracts hardware Applications
Introduction to the Robot Operating System (ROS)
") - Lisboa Introduction to Robotics 2018/2019 Introduction to the Robot Operating System (ROS) Rodrigo Ventura Instituto Superior Técnico, Universidade de Lisboa rodrigo.ventura@isr.tecnico.ulisboa.pt What
- Lisboa Introduction to Robotics 2018/2019 Introduction to the Robot Operating System (ROS) Rodrigo Ventura Instituto Superior Técnico, Universidade de Lisboa rodrigo.ventura@isr.tecnico.ulisboa.pt What
Overview KMR WS2012/13. ROS Basics. Robot Operating System (ROS) Practical Introduction. Johannes Maurer Clemens Mühlbacher. Master.
 Practical Introduction. Johannes Maurer Clemens Mühlbacher. Master.") KMR WS2012/13 Practical Introduction Overview Johannes Maurer Clemens Mühlbacher Graz University of Technology Graz, October 12th, 2012 1 2 Robot Operating System (ROS) open-source meta-operating system
KMR WS2012/13 Practical Introduction Overview Johannes Maurer Clemens Mühlbacher Graz University of Technology Graz, October 12th, 2012 1 2 Robot Operating System (ROS) open-source meta-operating system
The Kinematic Chain or Tree can be represented by a graph of links connected though joints between each Link and other links.
 Lab 3 URDF and Hydra Robot Models In this Lab we will learn how Unified Robot Description Format (URDF) describes robots and use it to design our own Robot. We will use the Ubuntu Linux editor gedit to
Lab 3 URDF and Hydra Robot Models In this Lab we will learn how Unified Robot Description Format (URDF) describes robots and use it to design our own Robot. We will use the Ubuntu Linux editor gedit to
Introduction to V-REP
 Introduction to V-REP virtuel robot experimentation platform by Mathias Thor This presentation is inspired by the official V-REP presentation and the official website Content V-REP Overview Scene Objects
Introduction to V-REP virtuel robot experimentation platform by Mathias Thor This presentation is inspired by the official V-REP presentation and the official website Content V-REP Overview Scene Objects
The Problem. Robotics is a huge and growing area: research, innovation Lack of standards for robotics. Programming Robots with ROS
 ROS Introduction Main concepts Basic commands Borrowed extensively from: Roi Yehoshua, BIU The Problem Robotics is a huge and growing area: research, innovation Lack of standards for robotics (C)2016 Roi
ROS Introduction Main concepts Basic commands Borrowed extensively from: Roi Yehoshua, BIU The Problem Robotics is a huge and growing area: research, innovation Lack of standards for robotics (C)2016 Roi
Master Thesis LSRO ROS interface and URDF parser for Webots
 Master Thesis LSRO ROS interface and URDF parser for Webots Simon Puligny Professor : Mondada Francesco Advisor : Olivier Michel Date : 14 February 2014 LSRO 14/12/2014 Mobile Robot Modeling, Simulation
Master Thesis LSRO ROS interface and URDF parser for Webots Simon Puligny Professor : Mondada Francesco Advisor : Olivier Michel Date : 14 February 2014 LSRO 14/12/2014 Mobile Robot Modeling, Simulation
Hands-On Session: Robotic Control
 : Robotic Control Robotics M.Sc. programme in Computer Science lorenzo.vannucci@santannapisa.it Ugo Albanese ugo.albanese@santannapisa.it Alessandro Ambrosano alessandro.ambrosano@santannapisa.it March
: Robotic Control Robotics M.Sc. programme in Computer Science lorenzo.vannucci@santannapisa.it Ugo Albanese ugo.albanese@santannapisa.it Alessandro Ambrosano alessandro.ambrosano@santannapisa.it March
T. Moulard () ROS tutorial January / 32
 ROS tutorial January / 32") ROS tutorial Thomas Moulard LAAS robotics courses, January 2012 T. Moulard () ROS tutorial January 2012 1 / 32 So what is ROS? A component oriented robotics framework, A development suite, A (bad) package
ROS tutorial Thomas Moulard LAAS robotics courses, January 2012 T. Moulard () ROS tutorial January 2012 1 / 32 So what is ROS? A component oriented robotics framework, A development suite, A (bad) package
Course Updates. Website set-up at
 Course Updates Website set-up at https://ae640a.github.io/ Canvas invite (for assignments & submissions) will be sent once course list (after add-drop) is available Attendance: 70% Minimum Last 2 lectures
Course Updates Website set-up at https://ae640a.github.io/ Canvas invite (for assignments & submissions) will be sent once course list (after add-drop) is available Attendance: 70% Minimum Last 2 lectures
Introduction to ROS. COMP3431 Robot Software Architectures
 Introduction to ROS COMP3431 Robot Software Architectures Robot Software Architecture A robot s software has to control a lot of things: 2D/3D Cameras, LIDAR, Microphones, etc Drive motors, Arm motors
Introduction to ROS COMP3431 Robot Software Architectures Robot Software Architecture A robot s software has to control a lot of things: 2D/3D Cameras, LIDAR, Microphones, etc Drive motors, Arm motors
Part 1: Rtabmap_ros Installation and Running SLAM with Recorded Sensor Data
 Assignment #4: Running SLAM with RGB-D sensor data Release: Jan 24, 2017 Due: Feb 2 (depends on signup) Checkoff Location: John Crerar Library - Kathleen A. Zar Room We will setup the space at John Crerar
Assignment #4: Running SLAM with RGB-D sensor data Release: Jan 24, 2017 Due: Feb 2 (depends on signup) Checkoff Location: John Crerar Library - Kathleen A. Zar Room We will setup the space at John Crerar
ROS : Robot Operating System
 ROS : Robot Operating System Weipeng He 2he@informatik.uni-hamburg.de 5 November, 2012 Outline Introduction Motivation Software Structure Community Conclusion Introduction What is ROS? ROS is Robot Operating
ROS : Robot Operating System Weipeng He 2he@informatik.uni-hamburg.de 5 November, 2012 Outline Introduction Motivation Software Structure Community Conclusion Introduction What is ROS? ROS is Robot Operating
ROS: introduction, concepts and examples
 ROS: introduction, concepts and examples Cédric Pradalier October 16 th, 2013 Objectives of this talk ROS and middleware Quick presentation Quick comparison Use case For teaching For research 2/21 Cédric
ROS: introduction, concepts and examples Cédric Pradalier October 16 th, 2013 Objectives of this talk ROS and middleware Quick presentation Quick comparison Use case For teaching For research 2/21 Cédric
Rosbridge web interface
 CENTER FOR MACHINE PERCEPTION Rosbridge web interface CZECH TECHNICAL UNIVERSITY IN PRAGUE Martin Blaha, Michal Kreč, Petr Marek, Tomáš Nouza, Tadeáš Lejsek blahama7@fel.cvut.cz, krecmich@fel.cvut.cz,
CENTER FOR MACHINE PERCEPTION Rosbridge web interface CZECH TECHNICAL UNIVERSITY IN PRAGUE Martin Blaha, Michal Kreč, Petr Marek, Tomáš Nouza, Tadeáš Lejsek blahama7@fel.cvut.cz, krecmich@fel.cvut.cz,
ROS Robot Operating System
 ROS Robot Operating System Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Why ROS? Understanding ROS community level Levels of development in ROS Understanding the ROS file system level Understanding
ROS Robot Operating System Amirreza Kabiri Fatemeh Pahlevan Aghababa Autumn 2017 Why ROS? Understanding ROS community level Levels of development in ROS Understanding the ROS file system level Understanding
Player/Gazebo Simulation Environment John I. Martin 7 January 2005
 Player/Gazebo Simulation Environment John I. Martin martinj@ece.osu.edu 7 January 2005 Introduction The Player/Gazebo simulation environment provides a virtual world in which high level robot control code
Player/Gazebo Simulation Environment John I. Martin martinj@ece.osu.edu 7 January 2005 Introduction The Player/Gazebo simulation environment provides a virtual world in which high level robot control code
Design of a dynamic simulation system for VR applications
 Design of a dynamic simulation system for VR applications Jan Bender Abstract A dynamic simulation system for VR applications consists of multiple parts. The first task that must be accomplished is the
Design of a dynamic simulation system for VR applications Jan Bender Abstract A dynamic simulation system for VR applications consists of multiple parts. The first task that must be accomplished is the
AUTONOMOUS WHEEL LOADER SIMULATOR
 Computer Science, Degree Project, Advanced Course, 15 Credits AUTONOMOUS WHEEL LOADER SIMULATOR Samuel Navas Medrano Computer Engineering Programme, 180 Credits Örebro, Sweden, Spring 2014 Examiner: Franziska
Computer Science, Degree Project, Advanced Course, 15 Credits AUTONOMOUS WHEEL LOADER SIMULATOR Samuel Navas Medrano Computer Engineering Programme, 180 Credits Örebro, Sweden, Spring 2014 Examiner: Franziska
Event-based Systems with ROS: Examples from the STAIR Project
 Event-based Systems with ROS: Examples from the STAIR Project Morgan Quigley Stanford University Joint work with: Stanford: Blake Carpenter, Adam Coates, Quoc Le, Ellen Klingbeil, Andrew Ng, many others
Event-based Systems with ROS: Examples from the STAIR Project Morgan Quigley Stanford University Joint work with: Stanford: Blake Carpenter, Adam Coates, Quoc Le, Ellen Klingbeil, Andrew Ng, many others
Progress review #3. Gauri Gandhi. Team G Robographers. Teammates: Rohit Dashrathi. Jimit Gandhi. Tiffany May. Sida Wang ILR #4
 Progress review #3 Gauri Gandhi Team G Robographers Teammates: Rohit Dashrathi Jimit Gandhi Tiffany May Sida Wang ILR #4 November 12, 2015 1 a. Individual Progress For the third progress review, I worked
Progress review #3 Gauri Gandhi Team G Robographers Teammates: Rohit Dashrathi Jimit Gandhi Tiffany May Sida Wang ILR #4 November 12, 2015 1 a. Individual Progress For the third progress review, I worked
MoveIt. Release Indigo. MoveIt Motion Planning Framework
 MoveIt Release Indigo MoveIt Motion Planning Framework August 10, 2016 Contents 1 Beginner Tutorials 1 2 Advanced Tutorials 13 3 Configuration Tutorials 23 i ii CHAPTER 1 Beginner Tutorials 1.1 Move Group
MoveIt Release Indigo MoveIt Motion Planning Framework August 10, 2016 Contents 1 Beginner Tutorials 1 2 Advanced Tutorials 13 3 Configuration Tutorials 23 i ii CHAPTER 1 Beginner Tutorials 1.1 Move Group
Cognitive Robotics ROS Introduction Matteo Matteucci
 Cognitive Robotics ROS Introduction ROS: Robot Operating System Presented in 2009 by Willow Garage is a meta-operating system for robotics with a rich ecosystem of tools and programs 2 ROS: Robot Operating
Cognitive Robotics ROS Introduction ROS: Robot Operating System Presented in 2009 by Willow Garage is a meta-operating system for robotics with a rich ecosystem of tools and programs 2 ROS: Robot Operating
URDF and You ROSCON David Lu!! Ph.D. Student Washington University In St. Louis. May 19, 2012
 = ROSCON 2012 Ph.D. Student Washington University In St. Louis May 19, 2012 < > Unified ROBOT DESCRIPTION FORMAT http://www.ros.org/wiki/urdf 2 Outline XML Specification TOOLS LIMITATIONS 3 Links and Joints
= ROSCON 2012 Ph.D. Student Washington University In St. Louis May 19, 2012 < > Unified ROBOT DESCRIPTION FORMAT http://www.ros.org/wiki/urdf 2 Outline XML Specification TOOLS LIMITATIONS 3 Links and Joints
Final Report. Project #19 Service robot simulation: Care-O-bot 4
 Aalto University ELEC-E8002/E8003 Project work course Year 2016 Final Report Project #19 Service robot simulation: Care-O-bot 4 Date: 12.12.2016 Taneli Halme Kimmo Ojala Otto Sirola Jason Toivanen Noora
Aalto University ELEC-E8002/E8003 Project work course Year 2016 Final Report Project #19 Service robot simulation: Care-O-bot 4 Date: 12.12.2016 Taneli Halme Kimmo Ojala Otto Sirola Jason Toivanen Noora
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class August 2017 Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Catkin (Create workspace) Installing
ROS-Industrial Basic Developer s Training Class August 2017 Southwest Research Institute 1 Session 1: ROS Basics Southwest Research Institute 2 Outline Intro to ROS Catkin (Create workspace) Installing
Teaching Assistant: Roi Yehoshua
 Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Introduction to ROS ROS Main Features ROS Main Concepts Installing ROS Agenda Course Administration Course s home page: http://www.cs.biu.ac.il/~yehoshr1/89-685/
Teaching Assistant: Roi Yehoshua roiyeho@gmail.com Introduction to ROS ROS Main Features ROS Main Concepts Installing ROS Agenda Course Administration Course s home page: http://www.cs.biu.ac.il/~yehoshr1/89-685/
E28 FALL 2016 ZUCKER PROJECT 1. Project 1: TurtleBot 2 Programming Basics
 Project 1: TurtleBot 2 Programming Basics OVERVIEW In this lab, you will learn about the Open Source Robotics Foundation ROS software, and get to know your TurtleBot 2 robot. You will also program your
Project 1: TurtleBot 2 Programming Basics OVERVIEW In this lab, you will learn about the Open Source Robotics Foundation ROS software, and get to know your TurtleBot 2 robot. You will also program your
begins halting unexpectedly, doing one or more of the following may improve performance;
 CLEARPATH ROBOTICS F r o m T h e D e s k o f T h e R o b o t s m i t h s Thank you for your Husky A200 order! As part of the integration, we have prepared this quick reference sheet for you and your team
CLEARPATH ROBOTICS F r o m T h e D e s k o f T h e R o b o t s m i t h s Thank you for your Husky A200 order! As part of the integration, we have prepared this quick reference sheet for you and your team
ROS Qt Creator Plug-in. Release
 ROS Qt Creator Plug-in Release Mar 18, 2018 Contents 1 Installation 1 2 FAQ 13 3 Users Help 15 4 Developers Help 23 5 Video Tutorials 25 i ii CHAPTER 1 Installation 1.1 How to Install (Users) This wiki
ROS Qt Creator Plug-in Release Mar 18, 2018 Contents 1 Installation 1 2 FAQ 13 3 Users Help 15 4 Developers Help 23 5 Video Tutorials 25 i ii CHAPTER 1 Installation 1.1 How to Install (Users) This wiki
Rigid Body Transformations
 F1/10 th Racing Rigid Body Transformations (Or How Different sensors see the same world) By, Paritosh Kelkar Mapping the surroundings Specify destination and generate path to goal The colored cells represent
F1/10 th Racing Rigid Body Transformations (Or How Different sensors see the same world) By, Paritosh Kelkar Mapping the surroundings Specify destination and generate path to goal The colored cells represent
FlyVR Documentation. Release 0.9. Andrew Straw
 FlyVR Documentation Release 0.9 Andrew Straw August 27, 2016 Contents 1 FlyVR pipeline overview 3 1.1 Installation and Getting Started..................................... 3 1.2 Using the joystick for
FlyVR Documentation Release 0.9 Andrew Straw August 27, 2016 Contents 1 FlyVR pipeline overview 3 1.1 Installation and Getting Started..................................... 3 1.2 Using the joystick for
S7316: Real-Time Robotics Control and Simulation for Deformable Terrain Applications Using the GPU
 S7316: Real-Time Robotics Control and Simulation for Deformable Terrain Applications Using the GPU Daniel Melanz Copyright 2017 Energid Technology Overview 1. Who are we? 2. What do we do? 3. How do we
S7316: Real-Time Robotics Control and Simulation for Deformable Terrain Applications Using the GPU Daniel Melanz Copyright 2017 Energid Technology Overview 1. Who are we? 2. What do we do? 3. How do we
ROS Qt Creator Plug-in. Release
 ROS Qt Creator Plug-in Release Mar 18, 2018 Contents 1 Installation 1 2 Users Help 13 3 Developers Help 17 4 Tutorials 19 i ii CHAPTER 1 Installation 1.1 How to Install (Users) This wiki explains the
ROS Qt Creator Plug-in Release Mar 18, 2018 Contents 1 Installation 1 2 Users Help 13 3 Developers Help 17 4 Tutorials 19 i ii CHAPTER 1 Installation 1.1 How to Install (Users) This wiki explains the
P2: Collaborations. CSE 335, Spring 2009
 P2: Collaborations CSE 335, Spring 2009 Milestone #1 due by Thursday, March 19 at 11:59 p.m. Completed project due by Thursday, April 2 at 11:59 p.m. Objectives Develop an application with a graphical
P2: Collaborations CSE 335, Spring 2009 Milestone #1 due by Thursday, March 19 at 11:59 p.m. Completed project due by Thursday, April 2 at 11:59 p.m. Objectives Develop an application with a graphical
Object Identification in Dynamic Environments
 Object Identication in Dynamic Environments Andrew Chou, Elliott Jin, Wy Mu December, Intruction The overall problem our project tackles is to have a robot be able to recognize objects that have been intruced
Object Identication in Dynamic Environments Andrew Chou, Elliott Jin, Wy Mu December, Intruction The overall problem our project tackles is to have a robot be able to recognize objects that have been intruced
ROS tf System February, Janyl Jumadinova
 ROS tf System 13-15 February, 2017 Janyl Jumadinova What is tf? A robotic system typically has many coordinate frames that change over time, such as a world frame, base frame, gripper frame, head frame,
ROS tf System 13-15 February, 2017 Janyl Jumadinova What is tf? A robotic system typically has many coordinate frames that change over time, such as a world frame, base frame, gripper frame, head frame,
SAS 9.2 Foundation Services. Administrator s Guide
 SAS 9.2 Foundation Services Administrator s Guide The correct bibliographic citation for this manual is as follows: SAS Institute Inc. 2009. SAS 9.2 Foundation Services: Administrator s Guide. Cary, NC:
SAS 9.2 Foundation Services Administrator s Guide The correct bibliographic citation for this manual is as follows: SAS Institute Inc. 2009. SAS 9.2 Foundation Services: Administrator s Guide. Cary, NC:
AMR 2011/2012: Final Projects
 AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
Cloud Robotics. Damon Kohler, Ryan Hickman (Google) Ken Conley, Brian Gerkey (Willow Garage) May 11, 2011
 Ken Conley, Brian Gerkey (Willow Garage) May 11, 2011") 1 Cloud Robotics Damon Kohler, Ryan Hickman (Google) Ken Conley, Brian Gerkey (Willow Garage) May 11, 2011 2 Overview Introduction (Ryan) ROS (Ken and Brian) ROS on Android (Damon) Closing Remarks (Ryan)
1 Cloud Robotics Damon Kohler, Ryan Hickman (Google) Ken Conley, Brian Gerkey (Willow Garage) May 11, 2011 2 Overview Introduction (Ryan) ROS (Ken and Brian) ROS on Android (Damon) Closing Remarks (Ryan)
Mobile Robots Robot Operating System (ROS)
") Mobile Robots Robot Operating System (ROS) Institute for Software Technology 1 Motivation Beer me https://www.youtube.com/watch?v=c3cq0sy4tbs 2 Robotics is Easy control behavior perception modelling domain
Mobile Robots Robot Operating System (ROS) Institute for Software Technology 1 Motivation Beer me https://www.youtube.com/watch?v=c3cq0sy4tbs 2 Robotics is Easy control behavior perception modelling domain
Creating outstanding digital cockpits with Qt Automotive Suite
 Creating outstanding digital cockpits with Qt Automotive Suite Get your digital cockpit first the finish line with Qt. Embedded World 2017 Trends in cockpit digitalization require a new approach to user
Creating outstanding digital cockpits with Qt Automotive Suite Get your digital cockpit first the finish line with Qt. Embedded World 2017 Trends in cockpit digitalization require a new approach to user
Introducing MoveIt! First, start the Baxter simulator in Gazebo:
 Introducing MoveIt! One of the challenging aspects of robotics is defining a path for the motion of a robot's arms to grasp an object, especially when obstacles may obstruct the most obvious path of motion.
Introducing MoveIt! One of the challenging aspects of robotics is defining a path for the motion of a robot's arms to grasp an object, especially when obstacles may obstruct the most obvious path of motion.
INF Introduction to Robot Operating System
 INF3480 - Introduction to Robot Operating System April 19, 2018 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
INF3480 - Introduction to Robot Operating System April 19, 2018 Justinas Mišeikis Side Note This is an overview lecture, but do expect exam question on ROS topic also. Please pay more attention to the
ROS-Industrial Basic Developer s Training Class
 ROS-Industrial Basic Developer s Training Class Shaun Edwards Sr. Research Engineer Southwest Research Institute 1 OVERVIEW 2 Overview Presentation See What Can ROS-I Do Today? presentation 3 INTRODUCTION
ROS-Industrial Basic Developer s Training Class Shaun Edwards Sr. Research Engineer Southwest Research Institute 1 OVERVIEW 2 Overview Presentation See What Can ROS-I Do Today? presentation 3 INTRODUCTION
VastPark Developer SDK
 VastPark Developer SDK Last Updated: 27th April 2009 Contents Introduction... 3 Metaforik... 4 How does it work?... 4 Write once, run everywhere... 4 Schema Documentation... 4 Examples... 4 Outerspace.xml...
VastPark Developer SDK Last Updated: 27th April 2009 Contents Introduction... 3 Metaforik... 4 How does it work?... 4 Write once, run everywhere... 4 Schema Documentation... 4 Examples... 4 Outerspace.xml...
Creating the Tilt Game with Blender 2.49b
 Creating the Tilt Game with Blender 2.49b Create a tilting platform. Start a new blend. Delete the default cube right click to select then press X and choose Erase Selected Object. Switch to Top view (NUM
Creating the Tilt Game with Blender 2.49b Create a tilting platform. Start a new blend. Delete the default cube right click to select then press X and choose Erase Selected Object. Switch to Top view (NUM
Saperion. Release Notes. Version: 8.0
 Saperion Release Notes Version: 8.0 Written by: Product Knowledge, R&D Date: July 2017 2017 Lexmark. All rights reserved. Lexmark is a trademark of Lexmark International Inc., registered in the U.S. and/or
Saperion Release Notes Version: 8.0 Written by: Product Knowledge, R&D Date: July 2017 2017 Lexmark. All rights reserved. Lexmark is a trademark of Lexmark International Inc., registered in the U.S. and/or
Game Design Unity Workshop
 Game Design Unity Workshop Activity 4 Goals: - Creation of small world - Creation of character - Scripting of player movement and camera following Load up unity Build Object: Collisions in Unity Aim: Build
Game Design Unity Workshop Activity 4 Goals: - Creation of small world - Creation of character - Scripting of player movement and camera following Load up unity Build Object: Collisions in Unity Aim: Build
From within the Timewarp interface, a mapping from Render Frame to Scene Frame is set through the Frame warp expression or graph.
 TimeWarp TimeWarp (Camera Motion Options) Timewarp basics Render frame versus Scene frame Motion blur and camera warping Plugin usage Timewarp interface Frame warp Warp blur Warp camera Fix camera Sub
TimeWarp TimeWarp (Camera Motion Options) Timewarp basics Render frame versus Scene frame Motion blur and camera warping Plugin usage Timewarp interface Frame warp Warp blur Warp camera Fix camera Sub
Game Programming Lab 25th April 2016 Team 7: Luca Ardüser, Benjamin Bürgisser, Rastislav Starkov
 Game Programming Lab 25th April 2016 Team 7: Luca Ardüser, Benjamin Bürgisser, Rastislav Starkov Interim Report 1. Development Stage Currently, Team 7 has fully implemented functional minimum and nearly
Game Programming Lab 25th April 2016 Team 7: Luca Ardüser, Benjamin Bürgisser, Rastislav Starkov Interim Report 1. Development Stage Currently, Team 7 has fully implemented functional minimum and nearly
CSC 2700: Scientific Computing
 CSC 2700: Scientific Computing Record and share your work: revision control systems Dr Frank Löffler Center for Computation and Technology Louisiana State University, Baton Rouge, LA Feb 13 2014 Overview
CSC 2700: Scientific Computing Record and share your work: revision control systems Dr Frank Löffler Center for Computation and Technology Louisiana State University, Baton Rouge, LA Feb 13 2014 Overview
Custom Component Development Using RenderMonkey SDK. Natalya Tatarchuk 3D Application Research Group ATI Research, Inc
 Custom Component Development Using RenderMonkey SDK Natalya Tatarchuk 3D Application Research Group ATI Research, Inc Overview Motivation Introduction to the SDK SDK Functionality Overview Conclusion 2
Custom Component Development Using RenderMonkey SDK Natalya Tatarchuk 3D Application Research Group ATI Research, Inc Overview Motivation Introduction to the SDK SDK Functionality Overview Conclusion 2
Advances in Qt 3D. Kévin Ottens, Software Craftsman at KDAB
 Advances in Qt 3D Kévin Ottens, Software Craftsman at KDAB Advances in Qt 3D Feature Set Entity Component System? What's that? Hello Donut Input Handling Animation with Qt 3D New PBR Materials Painted
Advances in Qt 3D Kévin Ottens, Software Craftsman at KDAB Advances in Qt 3D Feature Set Entity Component System? What's that? Hello Donut Input Handling Animation with Qt 3D New PBR Materials Painted
Tutorial: Using the UUCS Crowd Simulation Plug-in for Unity
 Tutorial: Using the UUCS Crowd Simulation Plug-in for Unity Introduction Version 1.1 - November 15, 2017 Authors: Dionysi Alexandridis, Simon Dirks, Wouter van Toll In this assignment, you will use the
Tutorial: Using the UUCS Crowd Simulation Plug-in for Unity Introduction Version 1.1 - November 15, 2017 Authors: Dionysi Alexandridis, Simon Dirks, Wouter van Toll In this assignment, you will use the
Programming for Robotics Introduction to ROS
 Programming for Robotics Introduction to ROS Course 4 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 27.02.2017 1 Course Structure Course 1 Course 2 Course 3
Programming for Robotics Introduction to ROS Course 4 Péter Fankhauser, Dominic Jud, Martin Wermelinger Prof. Dr. Marco Hutter Péter Fankhauser 27.02.2017 1 Course Structure Course 1 Course 2 Course 3
ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1. Guillermo Castillo (Wei Zhang)
") ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1 Guillermo Castillo (Wei Zhang) Department of Electrical and Computer Engineering Ohio State University 01/2018 Previous Steps Outline Previous
ECE 5463 Introduction to Robotics Spring 2018 ROS TUTORIAL 1 Guillermo Castillo (Wei Zhang) Department of Electrical and Computer Engineering Ohio State University 01/2018 Previous Steps Outline Previous
CSE 167: Introduction to Computer Graphics. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013
 CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
Computer Graphics Introduction. Taku Komura
 Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
PTN-202: Advanced Python Programming Course Description. Course Outline
 PTN-202: Advanced Python Programming Course Description This 4-day course picks up where Python I leaves off, covering some topics in more detail, and adding many new ones, with a focus on enterprise development.
PTN-202: Advanced Python Programming Course Description This 4-day course picks up where Python I leaves off, covering some topics in more detail, and adding many new ones, with a focus on enterprise development.
Code::Blocks Student Manual
 Code::Blocks Student Manual Lawrence Goetz, Network Administrator Yedidyah Langsam, Professor and Theodore Raphan, Distinguished Professor Dept. of Computer and Information Science Brooklyn College of
Code::Blocks Student Manual Lawrence Goetz, Network Administrator Yedidyah Langsam, Professor and Theodore Raphan, Distinguished Professor Dept. of Computer and Information Science Brooklyn College of
Training Course Content
 Pioneering engineering software systems, support & services. Training Course Content 29800 Middlebelt Road Suite 100 Farmington Hills, MI 48334 United States of America Tel: +1 248 737 9760 Fax: +1 248
Pioneering engineering software systems, support & services. Training Course Content 29800 Middlebelt Road Suite 100 Farmington Hills, MI 48334 United States of America Tel: +1 248 737 9760 Fax: +1 248
Tutorial 1: Basic functions
 Tutorial 1: Basic functions In this tutorial, you will learn the basic functions of CueluxPro. You will learn to patch and control fixtures, program scenes and play them. Note: This is a tutorial created
Tutorial 1: Basic functions In this tutorial, you will learn the basic functions of CueluxPro. You will learn to patch and control fixtures, program scenes and play them. Note: This is a tutorial created
Azrael Documentation. Release 0.2. Oliver Nagy
 Azrael Documentation Release 0.2 Oliver Nagy January 29, 2016 Contents 1 Overview 3 1.1 Philosophy................................................ 3 1.2 Architecture...............................................
Azrael Documentation Release 0.2 Oliver Nagy January 29, 2016 Contents 1 Overview 3 1.1 Philosophy................................................ 3 1.2 Architecture...............................................
ROS ARCHITECTURE: AN EXAMPLE ROBOTICS
 ROS ARCHITECTURE: AN EXAMPLE ROBOTICS GENERAL ARCHITECTURE sequencer_node goal control_node /willy2/cmd_vel /plan /willy2/pose ROBOT send_plan pose_node /willy2/odom GENERAL ARCHITECTURE sequencer_node
ROS ARCHITECTURE: AN EXAMPLE ROBOTICS GENERAL ARCHITECTURE sequencer_node goal control_node /willy2/cmd_vel /plan /willy2/pose ROBOT send_plan pose_node /willy2/odom GENERAL ARCHITECTURE sequencer_node
manifold Documentation
 manifold Documentation Release 0.0.1 Open Source Robotics Foundation Mar 04, 2017 Contents 1 What is Manifold? 3 2 Installation 5 2.1 Ubuntu Linux............................................... 5 2.2
manifold Documentation Release 0.0.1 Open Source Robotics Foundation Mar 04, 2017 Contents 1 What is Manifold? 3 2 Installation 5 2.1 Ubuntu Linux............................................... 5 2.2
IMPROVING THE 2.5D STAGE ROBOTIC SIMULATOR. Nick Wong and Jui-Chun Peng Hsu and Toby H. J. Collett and Bruce A. MacDonald
 IMPROVING THE 2.5D STAGE ROBOTIC SIMULATOR Nick Wong and Jui-Chun Peng Hsu and Toby H. J. Collett and Bruce A. MacDonald Department of Electrical and Computer Engineering University of Auckland, New Zealand
IMPROVING THE 2.5D STAGE ROBOTIC SIMULATOR Nick Wong and Jui-Chun Peng Hsu and Toby H. J. Collett and Bruce A. MacDonald Department of Electrical and Computer Engineering University of Auckland, New Zealand
Integrating Physics into a Modern Game Engine. Object Collision. Various types of collision for an object:
 Integrating Physics into a Modern Game Engine Object Collision Various types of collision for an object: Sphere Bounding box Convex hull based on rendered model List of convex hull(s) based on special
Integrating Physics into a Modern Game Engine Object Collision Various types of collision for an object: Sphere Bounding box Convex hull based on rendered model List of convex hull(s) based on special
COMP3431 Robot Software Architectures
 COMP3431 Robot Software Architectures Week 1 Introduction to ROS David Rajaratnam Click to edit Present s Name People Prof. Claude Sammut claude@cse.unsw.edu.au Timothy Wiley t.wiley@unsw.edu.au David
COMP3431 Robot Software Architectures Week 1 Introduction to ROS David Rajaratnam Click to edit Present s Name People Prof. Claude Sammut claude@cse.unsw.edu.au Timothy Wiley t.wiley@unsw.edu.au David
irobot Create Setup with ROS and Implement Odometeric Motion Model
 irobot Create Setup with ROS and Implement Odometeric Motion Model Welcome Lab 4 Dr. Ahmad Kamal Nasir 18.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to irobot-create Hardware Communication
irobot Create Setup with ROS and Implement Odometeric Motion Model Welcome Lab 4 Dr. Ahmad Kamal Nasir 18.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to irobot-create Hardware Communication
Syllabus- Java + Android. Java Fundamentals
 Introducing the Java Technology Syllabus- Java + Android Java Fundamentals Key features of the technology and the advantages of using Java Using an Integrated Development Environment (IDE) Introducing
Introducing the Java Technology Syllabus- Java + Android Java Fundamentals Key features of the technology and the advantages of using Java Using an Integrated Development Environment (IDE) Introducing
You can also export a video of what one of the cameras in the scene was seeing while you were recording your animations.[2]
![You can also export a video of what one of the cameras in the scene was seeing while you were recording your animations.[2]](/thumbs/89/97643092.jpg "You can also export a video of what one of the cameras in the scene was seeing while you were recording your animations.[2]") Scene Track for Unity User Manual Scene Track Plugin (Beta) The scene track plugin allows you to record live, textured, skinned mesh animation data, transform, rotation and scale animation, event data
Scene Track for Unity User Manual Scene Track Plugin (Beta) The scene track plugin allows you to record live, textured, skinned mesh animation data, transform, rotation and scale animation, event data
Set up and Foundation of the Husky
 Set up and Foundation of the Husky Marisa Warner, Jeremy Gottlieb, Gabriel Elkaim Worcester Polytechnic Institute University of California, Santa Cruz Abstract Clearpath s Husky A200 is an unmanned ground
Set up and Foundation of the Husky Marisa Warner, Jeremy Gottlieb, Gabriel Elkaim Worcester Polytechnic Institute University of California, Santa Cruz Abstract Clearpath s Husky A200 is an unmanned ground
Developing Cross-Platform Native Apps with AppStudio for ArcGIS. Jo Fraley Erwin Soekianto
 Developing Cross-Platform Native Apps with AppStudio for ArcGIS Jo Fraley Erwin Soekianto AppStudio for ArcGIS ios Android Linux 1App Windows Mac What is AppStudio for ArcGIS? A suite of productivity tools
Developing Cross-Platform Native Apps with AppStudio for ArcGIS Jo Fraley Erwin Soekianto AppStudio for ArcGIS ios Android Linux 1App Windows Mac What is AppStudio for ArcGIS? A suite of productivity tools
galileo Design Document Solomon Boulos
 galileo Design Document Solomon Boulos 1 Contents 1 Introduction 3 2 Overview 3 3 Code Organization 4 3.1 Core.................................................. 4 3.1.1 API..............................................
galileo Design Document Solomon Boulos 1 Contents 1 Introduction 3 2 Overview 3 3 Code Organization 4 3.1 Core.................................................. 4 3.1.1 API..............................................