Amplifying Human Performance Through Advanced Technology
|
|
|
- Bartholomew Lee
- 5 years ago
- Views:
Transcription


1 Amplifying Human Performance Through Advanced Technology Team Cybernet The Only Michigan Centric Team that Qualified for the Finals Over 10 Km segments traveled through obstacles, intersections, GPS denied areas, and among moving and still vehicles Integrated Urban and Terrain Planning & Behavior Technology validated Strap-down kit Qty 1 cost of goods < $20,000 per vehicle JAUS compliant architecture proves out Cybernet Systems Corporation 1

2 Michigan Centric IVS was a Honeywell, Minneapolis team with Ford as a partner GM was a partner on a CMU team Cybernet Systems Corporation 2

3 Partners and Sponsors Team Cybernet thanks the organizations that helped us, including: Cybernet Systems Corporation 3
4 Other Results Nav with GPS denied to GPS CEP (+/-10cm) for over 1 km 0.02% distance traveled < $10,000 in parts A ladar obstacle detection system that detects people or vehicles at relevant ranges reliably Novel computer vision/motion-change range detection demonstrated Lane departure system that is at 97%-99% reliability 75 Hz Ladar processing 30 Hz (8 camera) JPEG-based video processing using an off-the-shelf security architecture Relationship with IBEO for Lux Ladar in automotive quantities ~$400 per unit; self calibrating; 200m range; tolerant of obscurants, dirt, environmental New CAN control architecture under development Cybernet Systems Corporation 4





5 Purely Strapdown Approach Cybernet Systems Corporation 5


6 Sensors and Hardware Architecture Front Ladar Color CCD -- All except this one are inside passenger area 180 deg. FOV I3M MEMS INS Ladar hood Long Look CCD Warning light & audible GPS antenna Short Look CCD Side Sonar Wheel Rotation Sensors Side Sonar Rear Ladar Fiber Optic Gyro Ladar hood Cybernet Systems Corporation 6
 MEMS Gyros (3) MEMS Accelerometer Subsystem Subsystem")
 URBAN1: Control Computer Cybernet Systems")
7 Leverages Prior Work Portable OCU for Field Use Robot Control Mobile IMU Miniaturized MEMS Navigation System JAUS Architecture Topology SYSTEM (3) MEMS Gyros (3) MEMS Accelerometer Subsystem Subsystem Subsystem (3) 3 axis Digital Magnetometers USB Serial Node Node Node Node Comp1, Inst1 Comp2, Inst1 Comp2, Inst2 CompN, Inst1 GPS Wheel Encoder Counts (Via USB Counter) URBAN1: Control Computer Cybernet Systems Corporation 7



8 Machine Vision Change, Range, Land Departure 0 90 Vehicle -90 Range from Image Change Cybernet Systems Corporation 8 180



9 Novel Path Planner Based on Turn Radius and Obstacle Avoidance Margin Cybernet Systems Corporation 9


10 Test Range B Run on Track Plot & Shots from Other Runs Video Log Track Plot Cybernet Systems Corporation 10

 Vertical FOV: 12.")
 Up to three returns per range measure (automatic detection of")

11 Automotive LADAR 3D ERIM Ladar Cybernet Engineers ERIM LADAR for DARPA ALV & Navlab Automotive Temp. & Environmental Qualified Scan Frequency: 25 Hz Horizontal Angle: 100 Degree Range: 0.3 to 200m (support up to 80mph) Vertical FOV: 12.6 degree (four Up to three returns per range measure (automatic detection of optical and rain obscuration) Size/Weight: 3.3 x 6 x 3.3 /2 lbs Built-in ground and obstacle detection Class 1 eye safe Ethernet or CAN bus interfaces R&D Pricing: 9k; Automotive pricing: 400 IBEO LUX Distributed by Cybernet Cybernet Systems Corporation 11



12 IBEO in Action Cybernet Systems Corporation 12




13 Vehicle Test Cybernet Grand Challenge Vehicle under test at the General Motors Electromagnetic Test Facility for determination of microwave weapon assault susceptibility Chrysler Chelsea SwRI, San Antonio GM Milford Ford Romeo Cybernet Systems Corporation 13
14 Power Fuse 12 VDC Direct Feed Safety Systems Steering Servo Vehicle Generator Vehicle Battery Second Vehicle Battery Surge Current Ultracap Safe 12VDC Fuse Vehicle Fuses Sinusoidal Inverter (120VAC) Sinusoidal Inverter (120VAC) Interruptable 120VAC Uninterruptable Power Module Uninterruptable Power Module Uninterruptable Power Module Vehicle Electronic Systems System Control PC Computer Vision PC Other Subsystems Uninterruptable 120VAC Cybernet Systems Corporation 14
15 Safety Controller PC Run/Pause GUI OCU Run/Pause GUI Global Position System Lost (GPS out operating on INS too long a period Computer Vision Lost DARPA E-Stop Pause Run Software tie into the System Controller to effect coordinated Pause/Run Behavior Pause: 1. Turn on (keep on) Headlights and running lights 2. Retract Accelerator 3. Push Brake 4. Turn off Audible/Flasher warning Run: 1. Turn on (keep on) Headlights and running lights 2. Initiate Audible/Flasher 3. Wait 5 seconds 4. Restart path march behavior a. Set Speed b. Set next point Speed Minder Triggers (Acceleration is initiated but no speed encoder input received i.e. speed estimated is zero) Deadman Heartbeat Lost E-Stop Pause Run E-Stop E-stop 1. Turn off headlight and running lights 2. Turn off Audible/Flasher 3. Retract Accelerator 4. Push Brake 5. Kill Ignition 6. Put Controller into Pause State Link with OCU Lost Disable Switches Three function Gate opener Cybernet Systems Corporation 15
16 Encoder Reader Right Running Lights Headlights Horn Control Left Wheel Encoder Auto Iris Auto Iris Auto Iris Auto Iris Color CCD Color CCD Color CCD Color CCD Quad Channel Video to JPEG PC Power Sense URBAN1: Control Computer GPS FOG I3M Sonar Encoder Reader Left USB Digital Analog Counter Push Retract Audible & Flasher Right Turn Signal Left Turn Signal Ladars Power up Brake Actuator Push Right Wheel Encoder External E-Stop External Run/Pause Ladars Power Sense Brake Limit sense Auto Iris Auto Iris Auto Iris Auto Iris URBAN4: Range Data Processing Computer Color CCD Color CCD Color CCD Color CCD URBAN1: Control Computer PC Power Sense Quad Channel Video to JPEG URBAN2: Computer Vision Computer Steer Encoder Steer Actuator Push Retract Accel Actuator Retract Accel Limit sense Vehicle 1Gbit Ethernet Digital: USB Analog Out Mechanical Connection Digital Out Analog In Counter In Hardwired Push Retract Shifter Actuator Deadman Heartbeat Hardware Deadman Logic Shifter Limit sense Ignition Kill Ladar Data Hub Ladar Wireless Router Hub (802.11g) External Networks OCU Computer (Wireless E-Stop) Cybernet Systems Corporation 16
17 NextGen CAN Driving Control CAN Bus for Control Systems Interconnect Fault Tolerance Noise immunity CAN Accel Servo Accel Actuator Accel Push Feedback CAN CAN Digital I/O Hardware Safety System (Deadman Logic) CAN Brake Servo Brake Actuator Brake Push Feedback Relay Controller to Interface with Vehicle Systems Vehicle Safe/Kill Vehicle Control Harness CAN ebrake Servo ebrake Actuator ebrake Pull Feeback CAN Shift Servo CAN Encoder Left Shift Actuator Right Wheel Encoder Shift Position CAN Steer Servo Steer Actuator Steer Encoder CAN Encoder Right Left Wheel Encoder CAN Bus to CV1 Controller IBEO Ladar 1 IBEO Ladar 3 CAN CAN Digital I/O to Interface with Vehicle Systems Vehicle Sense Harness IBEO Ladar 2 IBEO Ladar 4 CAN Bus to CV1 Controller Cybernet Systems Corporation 17
18 Contact Information Dr. Charles Jacobus Mr. Steve Rowe Dr. Charles Cohen Cybernet Systems Corporation Cybernet Systems Corporation 18
DS-IMU NEXT GENERATION OF NAVIGATION INSTRUMENTS
 DS-IMU NEXT GENERATION OF NAVIGATION Ruggedized and reliable GPS aided inertial navigation system including AHRS that provides accurate position, velocity, acceleration and orientation under most demanding
DS-IMU NEXT GENERATION OF NAVIGATION Ruggedized and reliable GPS aided inertial navigation system including AHRS that provides accurate position, velocity, acceleration and orientation under most demanding
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL
 OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
OFERTA O120410PA CURRENT DATE 10/04//2012 VALID UNTIL 10/05/2012 SUMMIT XL CLIENT CLIENT: Gaitech REPRESENTANT: Andrew Pether MAIL: andyroojp@hotmail.com PRODUCT Introduction The SUMMIT XL has skid-steering
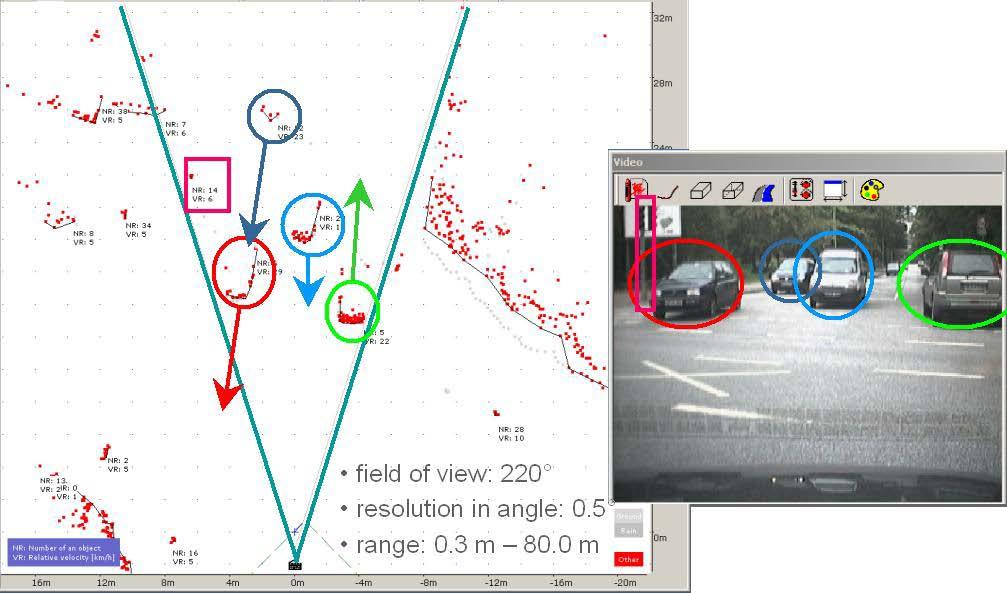
Pattern Recognition for Autonomous. Pattern Recognition for Autonomous. Driving. Freie Universität t Berlin. Raul Rojas
 Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Pattern Recognition for Autonomous Pattern Recognition for Autonomous Driving Raul Rojas Freie Universität t Berlin FU Berlin Berlin 3d model from Berlin Partner Freie Universitaet Berlin Outline of the
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Servosila Robotic Heads
 Servosila Robotic Heads www.servosila.com TABLE OF CONTENTS SERVOSILA ROBOTIC HEADS 2 SOFTWARE-DEFINED FUNCTIONS OF THE ROBOTIC HEADS 2 SPECIFICATIONS: ROBOTIC HEADS 4 DIMENSIONS OF ROBOTIC HEAD 5 DIMENSIONS
Servosila Robotic Heads www.servosila.com TABLE OF CONTENTS SERVOSILA ROBOTIC HEADS 2 SOFTWARE-DEFINED FUNCTIONS OF THE ROBOTIC HEADS 2 SPECIFICATIONS: ROBOTIC HEADS 4 DIMENSIONS OF ROBOTIC HEAD 5 DIMENSIONS
Datasheet 2102 SERIES TWO-AXIS POSITIONING AND RATE TABLE SYSTEM
 Datasheet 2102 SERIES TWO-AXIS POSITIONING AND RATE TABLE SYSTEM FEATURES Position Accuracy: ± 30 arc seconds (both axes) Rate Accuracy: ± 0.01% Max Rate (varies depending on axis configuration): Inner
Datasheet 2102 SERIES TWO-AXIS POSITIONING AND RATE TABLE SYSTEM FEATURES Position Accuracy: ± 30 arc seconds (both axes) Rate Accuracy: ± 0.01% Max Rate (varies depending on axis configuration): Inner
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.2: Sensors Jürgen Sturm Technische Universität München Sensors IMUs (inertial measurement units) Accelerometers
9th Intelligent Ground Vehicle Competition. Design Competition Written Report. Design Change Report AMIGO
 9th Intelligent Ground Vehicle Competition Design Competition Written Report Design Change Report AMIGO AMIGO means the friends who will join to the IGV Competition. Watanabe Laboratory Team System Control
9th Intelligent Ground Vehicle Competition Design Competition Written Report Design Change Report AMIGO AMIGO means the friends who will join to the IGV Competition. Watanabe Laboratory Team System Control
INTEGRATED TECH FOR INDUSTRIAL POSITIONING
 INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
INTEGRATED TECH FOR INDUSTRIAL POSITIONING Integrated Tech for Industrial Positioning aerospace.honeywell.com 1 Introduction We are the world leader in precision IMU technology and have built the majority
Automotive and Aerospace Synergies
 Corporate Technical Office Automotive and Aerospace Synergies Potential for common activities Denis Chapuis, EADS Corporate Technical Office, Electronics denis.chapuis@eads.net Seite 1 Presentation title
Corporate Technical Office Automotive and Aerospace Synergies Potential for common activities Denis Chapuis, EADS Corporate Technical Office, Electronics denis.chapuis@eads.net Seite 1 Presentation title
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Centreline Deviation Software Manual. Centreline Deviation Software User Guide
 Centreline Deviation Software User Guide 1 14/02/2014 Contents Centreline Deviation Testing System... 3 Software Overview... 4 How to setup your equipment for live testing... 4 Auto Configuration... 4
Centreline Deviation Software User Guide 1 14/02/2014 Contents Centreline Deviation Testing System... 3 Software Overview... 4 How to setup your equipment for live testing... 4 Auto Configuration... 4
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
Korea Autonomous Vehicle Contest 2013
 Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
Korea Autonomous Vehicle Contest 2013 Smart Mobility Team (RTOS Lab. & Dyros Lab.) Graduate School of Convergence Science and Technology Seoul National University Page 1 Contents 1. Contest Information
Wall-Follower. Xiaodong Fang. EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering
 Wall-Follower Xiaodong Fang EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering TAs: Tim Martin Josh Weaver Instructors: Dr. A. Antonio Arroyo
Wall-Follower Xiaodong Fang EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering TAs: Tim Martin Josh Weaver Instructors: Dr. A. Antonio Arroyo
HG4930 INERTIAL MEASUREMENT UNIT (IMU) Installation and Interface Manual
 Installation and Interface Manual") HG4930 INERTIAL MEASUREMENT UNIT (IMU) Installation and Interface Manual HG4930 Installation and Interface Manual aerospace.honeywell.com/hg4930 2 Table of Contents 4 5 6 10 11 13 13 Honeywell Industrial
HG4930 INERTIAL MEASUREMENT UNIT (IMU) Installation and Interface Manual HG4930 Installation and Interface Manual aerospace.honeywell.com/hg4930 2 Table of Contents 4 5 6 10 11 13 13 Honeywell Industrial
ECGR4161/5196 Lecture 6 June 9, 2011
 ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
ECGR4161/5196 Lecture 6 June 9, 2011 YouTube Videos: http://www.youtube.com/watch?v=7hag6zgj78o&feature=p layer_embedded Micro Robotics Worlds smallest robot - Version 1 - "tank" Worlds smallest robot
IMU and Encoders. Team project Robocon 2016
 IMU and Encoders Team project Robocon 2016 Harsh Sinha, 14265, harshsin@iitk.ac.in Deepak Gangwar, 14208, dgangwar@iitk.ac.in Swati Gupta, 14742, swatig@iitk.ac.in March 17 th 2016 IMU and Encoders Module
IMU and Encoders Team project Robocon 2016 Harsh Sinha, 14265, harshsin@iitk.ac.in Deepak Gangwar, 14208, dgangwar@iitk.ac.in Swati Gupta, 14742, swatig@iitk.ac.in March 17 th 2016 IMU and Encoders Module
VIA Mobile360 Surround View
 VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
VIA Mobile360 Surround View VIA Mobile360 Surround View delivers real-time in-vehicle 360 video monitoring and recording to provide the most effective solution for driver monitoring, safety and vehicle
Fire Bird V Insect - Nex Robotics
 Fire Bird V Insect is a small six legged robot. It has three pair of legs driven by one servo each. Robot can navigate itself using Sharp IR range sensors. It can be controlled wirelessly using ZigBee
Fire Bird V Insect is a small six legged robot. It has three pair of legs driven by one servo each. Robot can navigate itself using Sharp IR range sensors. It can be controlled wirelessly using ZigBee
INTRODUCTION SECURITY SERVICES BY WHITEBOX ROBOTICS
 A 1 INTRODUCTION SECURITY SERVICES BY WHITEBOX ROBOTICS Unmanned Ground Vehicles (UGV), Unmanned Aerial Vehicles (UAV), Remote Controlled Weapon Stations (RCWS), and Ground Rader B 1 SOLUTION SERVICES
A 1 INTRODUCTION SECURITY SERVICES BY WHITEBOX ROBOTICS Unmanned Ground Vehicles (UGV), Unmanned Aerial Vehicles (UAV), Remote Controlled Weapon Stations (RCWS), and Ground Rader B 1 SOLUTION SERVICES
Scott Kanowitz, A. Antonio Arroyo. Machine Intelligence Laboratory Department of Electrical and Computer Engineering
 Scott Kanowitz, A. Antonio Arroyo Machine Intelligence Laboratory Department of Electrical and Computer Engineering 332 Benton Hall University of Florida Gainesville, FL 32611 Email: skano@mil.ufl.edu
Scott Kanowitz, A. Antonio Arroyo Machine Intelligence Laboratory Department of Electrical and Computer Engineering 332 Benton Hall University of Florida Gainesville, FL 32611 Email: skano@mil.ufl.edu
Joe Buckner & Nir Chezrony
 I-Guide Intelligent Guide Robot Joe Buckner & Nir Chezrony Advisors: Dr. Joel Schipper & Dr. James Irwin, Jr. Sponsored By: Northrop Grumman Presentation Overview Project Summary Fall 2008 Accomplishments
I-Guide Intelligent Guide Robot Joe Buckner & Nir Chezrony Advisors: Dr. Joel Schipper & Dr. James Irwin, Jr. Sponsored By: Northrop Grumman Presentation Overview Project Summary Fall 2008 Accomplishments
Commercial and Residential Turntables. Motion Control User Manual Model MC-2
 Commercial and Residential Turntables Motion Control User Manual Model MC-2 Introduction The control system for the Carousel Turntables offers four modes of operation: 1. Manual 2. Camera 3. Preset 4.
Commercial and Residential Turntables Motion Control User Manual Model MC-2 Introduction The control system for the Carousel Turntables offers four modes of operation: 1. Manual 2. Camera 3. Preset 4.
Designing a software framework for automated driving. Dr.-Ing. Sebastian Ohl, 2017 October 12 th
 Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
Designing a software framework for automated driving Dr.-Ing. Sebastian Ohl, 2017 October 12 th Challenges Functional software architecture with open interfaces and a set of well-defined software components
INSPIRE 1 Quick Start Guide V1.0
 INSPIRE Quick Start Guide V.0 The Inspire is a professional aerial filmmaking and photography platform that is ready to fly right out of the box. Featuring an onboard camera equipped with a 0mm lens and
INSPIRE Quick Start Guide V.0 The Inspire is a professional aerial filmmaking and photography platform that is ready to fly right out of the box. Featuring an onboard camera equipped with a 0mm lens and
2002 Intelligent Ground Vehicle Competition Design Report. Grizzly Oakland University
 2002 Intelligent Ground Vehicle Competition Design Report Grizzly Oakland University June 21, 2002 Submitted By: Matt Rizzo Brian Clark Brian Yurconis Jelena Nikolic I. ABSTRACT Grizzly is the product
2002 Intelligent Ground Vehicle Competition Design Report Grizzly Oakland University June 21, 2002 Submitted By: Matt Rizzo Brian Clark Brian Yurconis Jelena Nikolic I. ABSTRACT Grizzly is the product
United Vision Solutions
 United Vision Solutions 10 Center Sr., Suite 401 & 402, Chicopee, MA 01013, USA Email: sales@unitedvisionsolutions.com Email: info@unitedvisionsolutions.com Sales Dept. 413-592-8477 United Vision Solutions,
United Vision Solutions 10 Center Sr., Suite 401 & 402, Chicopee, MA 01013, USA Email: sales@unitedvisionsolutions.com Email: info@unitedvisionsolutions.com Sales Dept. 413-592-8477 United Vision Solutions,
Vehicle Safety Communications Project Final Overview
 CAMP IVI Light Vehicle Enabling Research Program Vehicle Safety Communications Project Final Overview Vehicle Safety Communications (VSC) Project 2.5 year program started in May 2002 VSC Consortium Members:
CAMP IVI Light Vehicle Enabling Research Program Vehicle Safety Communications Project Final Overview Vehicle Safety Communications (VSC) Project 2.5 year program started in May 2002 VSC Consortium Members:
DRTS 66. The new generation of advanced test equipments for Relays, Energy meters, Transducers and Power quality meters
 The new generation of advanced test equipments for Relays, Energy meters, Transducers and Power quality meters Testing all relay technologies: electromechanical, solid state, numerical and IEC61850 Manual
The new generation of advanced test equipments for Relays, Energy meters, Transducers and Power quality meters Testing all relay technologies: electromechanical, solid state, numerical and IEC61850 Manual
FN-MAZDA3 Installation Manual
 Manual Version: V20150401 FN-MAZDA3 Installation Manual Product Name: FN-Mazda3 Product Type: Interface with build in navigation Application: All Mazda 2014/2015 cars with new Mazda Connect systems What's
Manual Version: V20150401 FN-MAZDA3 Installation Manual Product Name: FN-Mazda3 Product Type: Interface with build in navigation Application: All Mazda 2014/2015 cars with new Mazda Connect systems What's
Thomas Bräunl EMBEDDED ROBOTICS. Mobile Robot Design and Applications with Embedded Systems. Second Edition. With 233 Figures and 24 Tables.
 Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
VLT 2800 DRIVE SPECIFICATIONS
 VLT 2800 DRIVE SPECIFICATIONS Drive Input Power Input voltage 3 phase... 200 through 240, or 380 through 460; 3-phase all ratings 200 through 240, 1-phase through 2 HP Input voltage range for full output...
VLT 2800 DRIVE SPECIFICATIONS Drive Input Power Input voltage 3 phase... 200 through 240, or 380 through 460; 3-phase all ratings 200 through 240, 1-phase through 2 HP Input voltage range for full output...
GAFFCO UNDER VEHICLE BOMB DECTECTOR ( UVBD ) SYSTEM
 SYSTEM") GAFFCO UNDER VEHICLE BOMB DECTECTOR ( UVBD ) SYSTEM Overview of Technology Below are the primary features & capabilities that separate the UVBD System from all other under vehicle inspection systems. In
GAFFCO UNDER VEHICLE BOMB DECTECTOR ( UVBD ) SYSTEM Overview of Technology Below are the primary features & capabilities that separate the UVBD System from all other under vehicle inspection systems. In
EtherNet/IP with Applied Motion Drives
 EtherNet/IP with Applied Motion Drives EtherNet/IP with Applied Motion Drives Jeff Kordik CTO Applied Motion Products, Inc. 1 92-5 Rev. B Applied Motion Products Contents Overview of EtherNet/IP...3 EtherNet/IP
EtherNet/IP with Applied Motion Drives EtherNet/IP with Applied Motion Drives Jeff Kordik CTO Applied Motion Products, Inc. 1 92-5 Rev. B Applied Motion Products Contents Overview of EtherNet/IP...3 EtherNet/IP
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
ROBOT TEAMS CH 12. Experiments with Cooperative Aerial-Ground Robots
 ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
Southern Illinois University Edwardsville
 Southern Illinois University Edwardsville 2014-2015 I certify that the design and engineering of the vehicle Roadrunner by the SIUE Team Roadrunner has been significant and equivalent to what might be
Southern Illinois University Edwardsville 2014-2015 I certify that the design and engineering of the vehicle Roadrunner by the SIUE Team Roadrunner has been significant and equivalent to what might be
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology. MDrive 23 Hybrid Motion Control
 MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 23 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 23 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
InteLAS Family of Mobile LiDAR Systems
 InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
Laserscanner Based Cooperative Pre-Data-Fusion
 Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
Laserscanner Based Cooperative Pre-Data-Fusion 63 Laserscanner Based Cooperative Pre-Data-Fusion F. Ahlers, Ch. Stimming, Ibeo Automobile Sensor GmbH Abstract The Cooperative Pre-Data-Fusion is a novel
> Acoustical feedback in the form of a beep with increasing urgency with decreasing distance to an obstacle
 PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
PARKING ASSIST TESTING THE MEASURABLE DIFFERENCE. > Creation of complex 2-dimensional objects > Online distance calculations between moving and stationary objects > Creation of Automatic Points of Interest
Appendix E: Edge Ti. Overview. Appendix E: Edge Ti 169
 Appendix E: Edge Ti 169 Appendix E: Edge Ti Overview The Edge Ti shape cutting control is an extremely versatile product offering up to four configurable axes of motion, built-in Servo Amplifiers and configurable
Appendix E: Edge Ti 169 Appendix E: Edge Ti Overview The Edge Ti shape cutting control is an extremely versatile product offering up to four configurable axes of motion, built-in Servo Amplifiers and configurable
Project: UAV Payload Retract Mechanism. Company Background. Introduction
 Ascent Vision Technologies LLC 90 Aviation Lane Belgrade, MT 59714 Tel 406.388.2092 Fax 406.388.8133 www.ascentvision.com Project: UAV Payload Retract Mechanism Company Background Ascent Vision Technologies
Ascent Vision Technologies LLC 90 Aviation Lane Belgrade, MT 59714 Tel 406.388.2092 Fax 406.388.8133 www.ascentvision.com Project: UAV Payload Retract Mechanism Company Background Ascent Vision Technologies
begins halting unexpectedly, doing one or more of the following may improve performance;
 CLEARPATH ROBOTICS F r o m T h e D e s k o f T h e R o b o t s m i t h s Thank you for your Husky A200 order! As part of the integration, we have prepared this quick reference sheet for you and your team
CLEARPATH ROBOTICS F r o m T h e D e s k o f T h e R o b o t s m i t h s Thank you for your Husky A200 order! As part of the integration, we have prepared this quick reference sheet for you and your team
Quick Reference Card. Setting up the FmX Integrated Display with the Autopilot System
 Setting up the FmX Integrated Display with the Autopilot System Quick Reference Card CONNECTING THE SYSTEM Once the Autopilot system has been professionally installed, add the FmX integrated display as
Setting up the FmX Integrated Display with the Autopilot System Quick Reference Card CONNECTING THE SYSTEM Once the Autopilot system has been professionally installed, add the FmX integrated display as
Iwane Mobile Mapping System
 Iwane Mobile Mapping System Geo-Imaging Mobile Mapping Solution Iwane Mobile Mapping System (IMMS) is high-efficient, easyto-use, end-to-end solution that provides tremendous flexibility in collecting,
Iwane Mobile Mapping System Geo-Imaging Mobile Mapping Solution Iwane Mobile Mapping System (IMMS) is high-efficient, easyto-use, end-to-end solution that provides tremendous flexibility in collecting,
Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car
 Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car Junsung Kim, Hyoseung Kim, Karthik Lakshmanan and Raj Rajkumar Carnegie Mellon University Google 2 CMU s Autonomous
Parallel Scheduling for Cyber-Physical Systems: Analysis and Case Study on a Self-Driving Car Junsung Kim, Hyoseung Kim, Karthik Lakshmanan and Raj Rajkumar Carnegie Mellon University Google 2 CMU s Autonomous
United Vision Solutions
 United Vision Solutions 10 Center Sr., Suite 401 & 402, Chicopee, MA 01013, USA Email: sales@unitedvisionsolutions.com Email: info@unitedvisionsolutions.com Sales Dept. 413-592-8477 United Vision Solutions,
United Vision Solutions 10 Center Sr., Suite 401 & 402, Chicopee, MA 01013, USA Email: sales@unitedvisionsolutions.com Email: info@unitedvisionsolutions.com Sales Dept. 413-592-8477 United Vision Solutions,
GROUP 23 Military Surveillance Robotic Vehicle. Ryan Hromada - EE John Baumgartner - EE Austin King - CpE Kevin Plaza - CpE
 GROUP 23 Military Surveillance Robotic Vehicle Ryan Hromada - EE John Baumgartner - EE Austin King - CpE Kevin Plaza - CpE INTRODUCTION Autonomous tracking vehicle Commands: Basic Movement Commands Wander
GROUP 23 Military Surveillance Robotic Vehicle Ryan Hromada - EE John Baumgartner - EE Austin King - CpE Kevin Plaza - CpE INTRODUCTION Autonomous tracking vehicle Commands: Basic Movement Commands Wander
MDrive Plus Stepper motors with integrated electronics. MDrive 34ac Plus Step / direction input
 MDrive Plus Stepper motors with integrated electronics MDrive 34ac Plus Step / direction input 2 Specifi cations MDrive Plus Step / direction input Plus specifications MDrive 14 MDrive 17 MDrive 23 (1)
MDrive Plus Stepper motors with integrated electronics MDrive 34ac Plus Step / direction input 2 Specifi cations MDrive Plus Step / direction input Plus specifications MDrive 14 MDrive 17 MDrive 23 (1)
7.58 lbs (3440 g, including two batteries, without gimbal and camera)
") Appendix Specifications Aircraft Weight Max Takeoff Weight GPS Hovering Accuracy Max Angular Velocity Max Tilt Angle Max Ascent Speed Max Descent Speed Max Takeoff Sea Level Max Wind Speed Resistance T650
Appendix Specifications Aircraft Weight Max Takeoff Weight GPS Hovering Accuracy Max Angular Velocity Max Tilt Angle Max Ascent Speed Max Descent Speed Max Takeoff Sea Level Max Wind Speed Resistance T650
Autonomous Mobile Robots Using Real Time Kinematic Signal Correction and Global Positioning System Control
 Paper 087, IT 304 Autonomous Mobile Robots Using Real Time Kinematic Signal Correction and Global Positioning System Control Thongchai Phairoh, Keith Williamson Virginia State University tphairoh@vsu.edu
Paper 087, IT 304 Autonomous Mobile Robots Using Real Time Kinematic Signal Correction and Global Positioning System Control Thongchai Phairoh, Keith Williamson Virginia State University tphairoh@vsu.edu
Jo-Car2 Autonomous Mode. Path Planning (Cost Matrix Algorithm)
") Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Chapter 8.2 Jo-Car2 Autonomous Mode Path Planning (Cost Matrix Algorithm) Introduction: In order to achieve its mission and reach the GPS goal safely; without crashing into obstacles or leaving the lane,
Evaluating the Performance of a Vehicle Pose Measurement System
 Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Evaluating the Performance of a Vehicle Pose Measurement System Harry Scott Sandor Szabo National Institute of Standards and Technology Abstract A method is presented for evaluating the performance of
Visionary EXT. Intelligent Camera System PATENT PENDING
 Visionary EXT Intelligent Camera System PATENT PENDING EXTended Range Aventura's Visionary EXT represents a new paradigm in video surveillance, where an operator can concentrate on watching a single screen
Visionary EXT Intelligent Camera System PATENT PENDING EXTended Range Aventura's Visionary EXT represents a new paradigm in video surveillance, where an operator can concentrate on watching a single screen
Inertial Navigation Systems
 Inertial Navigation Systems Kiril Alexiev University of Pavia March 2017 1 /89 Navigation Estimate the position and orientation. Inertial navigation one of possible instruments. Newton law is used: F =
Inertial Navigation Systems Kiril Alexiev University of Pavia March 2017 1 /89 Navigation Estimate the position and orientation. Inertial navigation one of possible instruments. Newton law is used: F =
Powerful Sensing Solutions
 Accelerometers Inclinometers Magnetometers Flow Sensors Inertial Systems Accelerometers Patented Thermal Accelerometer Technology Thermal accelerometer uses heated gas as proof mass Typical Applications:
Accelerometers Inclinometers Magnetometers Flow Sensors Inertial Systems Accelerometers Patented Thermal Accelerometer Technology Thermal accelerometer uses heated gas as proof mass Typical Applications:
Inertial Measurement for planetary exploration: Accelerometers and Gyros
 Inertial Measurement for planetary exploration: Accelerometers and Gyros Bryan Wagenknecht 1 Significance of Inertial Measurement Important to know where am I? if you re an exploration robot Probably don
Inertial Measurement for planetary exploration: Accelerometers and Gyros Bryan Wagenknecht 1 Significance of Inertial Measurement Important to know where am I? if you re an exploration robot Probably don
DATA ACQUISITION KIT DESCRIPTION INSTALLATION LAYOUT. Wirings connections
 DATA ACQUISITION KIT DESCRIPTION EVO 3 data logger (8 or 13 channels version) Interface Junction Box Aim Infrared transmitter 12 Volts power cable for infrared transmitter Infrared receiver Wirings to
DATA ACQUISITION KIT DESCRIPTION EVO 3 data logger (8 or 13 channels version) Interface Junction Box Aim Infrared transmitter 12 Volts power cable for infrared transmitter Infrared receiver Wirings to
Android Spybot. ECE Capstone Project
 Android Spybot ECE Capstone Project Erik Bruckner - bajisci@eden.rutgers.edu Jason Kelch - jkelch@eden.rutgers.edu Sam Chang - schang2@eden.rutgers.edu 5/6/2014 1 Table of Contents Introduction...3 Objective...3
Android Spybot ECE Capstone Project Erik Bruckner - bajisci@eden.rutgers.edu Jason Kelch - jkelch@eden.rutgers.edu Sam Chang - schang2@eden.rutgers.edu 5/6/2014 1 Table of Contents Introduction...3 Objective...3
Design Considerations And The Impact of CMOS Image Sensors On The Car
 Design Considerations And The Impact of CMOS Image Sensors On The Car Intuitive Automotive Image Sensors To Promote Safer And Smarter Driving Micron Technology, Inc., has just introduced a new image sensor
Design Considerations And The Impact of CMOS Image Sensors On The Car Intuitive Automotive Image Sensors To Promote Safer And Smarter Driving Micron Technology, Inc., has just introduced a new image sensor
MDrive Plus Stepper motors with integrated electronics. MDrive 34 Plus Motion Control fully programmable
 MDrive Plus Stepper motors with integrated electronics MDrive 34 Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
MDrive Plus Stepper motors with integrated electronics MDrive 34 Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
ECE1778: Creative Applications for Mobile Devices. Mover-bot. Android-based Mobile Robotics Development Platform
 ECE1778: Creative Applications for Mobile Devices Mover-bot Android-based Mobile Robotics Development Platform and Fitsum Andargie Word count: 1639 4/8/2012 0 Introduction: Traditionally, research in the
ECE1778: Creative Applications for Mobile Devices Mover-bot Android-based Mobile Robotics Development Platform and Fitsum Andargie Word count: 1639 4/8/2012 0 Introduction: Traditionally, research in the
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Example of Technology Development Program
 Example of Technology Development Program SSTDM 2014 IISC, Bangalore, India April 1, 2014 Dr. Marco Villa CANEUS Small Satellites Director Tyvak VP Space Vehicle Systems Ground rules Power and Volume are
Example of Technology Development Program SSTDM 2014 IISC, Bangalore, India April 1, 2014 Dr. Marco Villa CANEUS Small Satellites Director Tyvak VP Space Vehicle Systems Ground rules Power and Volume are
KELVIN: Kart for Long distance Vision Navigation 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, Florida A&M University
 KELVIN: Kart for Long distance Vision Navigation 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, Florida A&M University Jason W. Grzywna Researcher, MIL Email: grzywna@ufl.edu Dr.
KELVIN: Kart for Long distance Vision Navigation 2001 Florida Conference on Recent Advances in Robotics May 10-11, 2001, Florida A&M University Jason W. Grzywna Researcher, MIL Email: grzywna@ufl.edu Dr.
Sensor Integration and Image Georeferencing for Airborne 3D Mapping Applications
 Sensor Integration and Image Georeferencing for Airborne 3D Mapping Applications By Sameh Nassar and Naser El-Sheimy University of Calgary, Canada Contents Background INS/GPS Integration & Direct Georeferencing
Sensor Integration and Image Georeferencing for Airborne 3D Mapping Applications By Sameh Nassar and Naser El-Sheimy University of Calgary, Canada Contents Background INS/GPS Integration & Direct Georeferencing
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology. MDrive 17 Hybrid Motion Control
 MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 17 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
MDrive Hybrid Integrated motion systems with Hybrid Motion Technology MDrive 17 Hybrid Description MDrive Hybrid Presentation The MDrive Hybrid is a very compact motion system that solves many servo applications
Wrap Control Panel. Installation Guide and User Manual - Version 1.0. Sales: icscarwashsystems.
 Wrap Control Panel Installation Guide and User Manual - Version 1.0 Corporate Office: 1349 1349 Jacobsburg Jacobsburg Road, Road, Wind Wind Gap, Gap, PA PA 18091 18091 Production Production Facility: Facility:
Wrap Control Panel Installation Guide and User Manual - Version 1.0 Corporate Office: 1349 1349 Jacobsburg Jacobsburg Road, Road, Wind Wind Gap, Gap, PA PA 18091 18091 Production Production Facility: Facility:
Mirror positioning on your fingertip. Embedded controller means tiny size plus fast, easy integration. Low power for hand-held systems
 SMALL, PRECISE, SMART IN MOTION DK-M3-RS-U-1M-20 Developer s Kit Single-Axis Mirror Positioning System Miniature piezo smart stage with built-in controller for simple, precise point-to-point positioning
SMALL, PRECISE, SMART IN MOTION DK-M3-RS-U-1M-20 Developer s Kit Single-Axis Mirror Positioning System Miniature piezo smart stage with built-in controller for simple, precise point-to-point positioning
Selection and Integration of Sensors Alex Spitzer 11/23/14
 Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
Selection and Integration of Sensors Alex Spitzer aes368@cornell.edu 11/23/14 Sensors Perception of the outside world Cameras, DVL, Sonar, Pressure Accelerometers, Gyroscopes, Magnetometers Position vs
8th Intelligent Ground Vehicle Competition
 8th Intelligent Ground Vehicle Competition Design Competition Written Report AMIGO AMIGO means the friends who will join to the IGV Competition. Watanabe Laboratory Team System Control Engineering Department
8th Intelligent Ground Vehicle Competition Design Competition Written Report AMIGO AMIGO means the friends who will join to the IGV Competition. Watanabe Laboratory Team System Control Engineering Department
Perspective Sensing for Inertial Stabilization
 Perspective Sensing for Inertial Stabilization Dr. Bernard A. Schnaufer Jeremy Nadke Advanced Technology Center Rockwell Collins, Inc. Cedar Rapids, IA Agenda Rockwell Collins & the Advanced Technology
Perspective Sensing for Inertial Stabilization Dr. Bernard A. Schnaufer Jeremy Nadke Advanced Technology Center Rockwell Collins, Inc. Cedar Rapids, IA Agenda Rockwell Collins & the Advanced Technology
Thank you for your purchase.
 Thank you for your purchase. Please read and understand the complete installation instructions before attempting to install this simple wire-in product. If not installed properly, LaunchMAX will not function
Thank you for your purchase. Please read and understand the complete installation instructions before attempting to install this simple wire-in product. If not installed properly, LaunchMAX will not function
MAC-3xx Core. Application. As the result, we deliver any customized SPEC Off-the-Shelf
 MAC-3xx Core 333MHz (3ns) ADSP-21362 SHARC DSP 2.0 GigaFLOP s, SIMD Core IEEE-compatible 32-bit floating-point, 40-bit extended floating-point 64 bit memory mapping format 80 bit MAC Instructions 200 MHz,
MAC-3xx Core 333MHz (3ns) ADSP-21362 SHARC DSP 2.0 GigaFLOP s, SIMD Core IEEE-compatible 32-bit floating-point, 40-bit extended floating-point 64 bit memory mapping format 80 bit MAC Instructions 200 MHz,
Active2012 HOSEI UNIVERSITY
 Active2012 HOSEI UNIVERSITY Faculty of Science and Engineering, Hosei University 3-7-2 Kajinocho Koganei, Tokyo 194-8584, Japan E-mail; ikko@hosei.ac.jp Faculty Advisor Statement I hereby certify that
Active2012 HOSEI UNIVERSITY Faculty of Science and Engineering, Hosei University 3-7-2 Kajinocho Koganei, Tokyo 194-8584, Japan E-mail; ikko@hosei.ac.jp Faculty Advisor Statement I hereby certify that
DJI Ace One product release notes
 Date : 26 July 2012 Ace One firmware version : 4.02 Ace Assistant software version : 2.4 Low Voltage Warning Semi Auto Takeoff & Landing (Optional) Ground Station chargeable functions: View (optional)
Date : 26 July 2012 Ace One firmware version : 4.02 Ace Assistant software version : 2.4 Low Voltage Warning Semi Auto Takeoff & Landing (Optional) Ground Station chargeable functions: View (optional)
Homework 13: User Manual
 Homework 13: User Manual Team Code Name: Autonomous Targeting Vehicle Group No. 3 User Manual Outline: Brief (marketing-style) product description Product illustration annotated with callouts for each
Homework 13: User Manual Team Code Name: Autonomous Targeting Vehicle Group No. 3 User Manual Outline: Brief (marketing-style) product description Product illustration annotated with callouts for each
DRTS 33. The new generation of advanced test equipments for Relays, Energy meters, Transducers and Power quality meters
 The new generation of advanced test equipments for Relays, Energy meters, Transducers and Power quality meters Testing all relay technologies: electromechanical, solid state, numerical and IEC61850 Manual
The new generation of advanced test equipments for Relays, Energy meters, Transducers and Power quality meters Testing all relay technologies: electromechanical, solid state, numerical and IEC61850 Manual
Nearus USB2.0 Camera Manual NU-350-USB2PTZ-B
 Nearus USB2.0 Camera Manual NU-350-USB2PTZ-B Safety Tips Please read this manual carefully before installing the camera. Keep the camera away from violent vibration, physical stress, moisture, extreme
Nearus USB2.0 Camera Manual NU-350-USB2PTZ-B Safety Tips Please read this manual carefully before installing the camera. Keep the camera away from violent vibration, physical stress, moisture, extreme
MDrive Plus Stepper motors with integrated electronics. MDrive Plus 14 CANopen
 MDrive Plus Stepper motors with integrated electronics MDrive Plus 14 Description MDrive Plus Presentation The MDrive Plus with interface is a 1.8 2-phase stepper motor with on-board controller, drive
MDrive Plus Stepper motors with integrated electronics MDrive Plus 14 Description MDrive Plus Presentation The MDrive Plus with interface is a 1.8 2-phase stepper motor with on-board controller, drive
Troubleshooting in navigation system 2
 Page 1 of 7 Pin assignments, functions etc. apply to vehicles of the series E38 and E39 with navigation system 2 (as from production break PU 97) Introduction The navigation system is a dynamic system
Page 1 of 7 Pin assignments, functions etc. apply to vehicles of the series E38 and E39 with navigation system 2 (as from production break PU 97) Introduction The navigation system is a dynamic system
Bag Lifting Tethering Crane Lifting Debogging Transport. No. 2: Customized package
 Recovery Manager Software All recovery methods in one software Your next recovery will be much smoother with SefrinTec. SefrinTec s perfect interaction between the pressure-sensitive sensors inside the
Recovery Manager Software All recovery methods in one software Your next recovery will be much smoother with SefrinTec. SefrinTec s perfect interaction between the pressure-sensitive sensors inside the
Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner
 AARMS Vol. 15, No. 1 (2016) 51 59. Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner Peter KUCSERA 1 Thanks to the developing sensor technology in mobile robot navigation
AARMS Vol. 15, No. 1 (2016) 51 59. Indoor Mobile Robot Navigation and Obstacle Avoidance Using a 3D Camera and Laser Scanner Peter KUCSERA 1 Thanks to the developing sensor technology in mobile robot navigation
NOTICE OF INTENDED INSTALLATION AND USE
 * JBL Audio equipped vehicles will require additional part # DP-TYJBL1 audio interface. NOTICE OF INTENDED INSTALLATION AND USE THE ROSEN MULTI-MEDIA NAVIGATION SYSTEMS CONTAIN AN INTERNAL VIDEO PLAYER,
* JBL Audio equipped vehicles will require additional part # DP-TYJBL1 audio interface. NOTICE OF INTENDED INSTALLATION AND USE THE ROSEN MULTI-MEDIA NAVIGATION SYSTEMS CONTAIN AN INTERNAL VIDEO PLAYER,
IP-S2 HD. High Definition 3D Mobile Mapping System
 IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
IP-S2 HD High Definition 3D Mobile Mapping System Integrated, turnkey solution Georeferenced, Time-Stamped, Point Clouds and Imagery High Density, Long Range LiDAR sensor for ultimate in visual detail
Introduction & Features. Important Notes. Installation Steps
 Navigation Unlock & Reverse Camera Input Interface for Chrysler/Dodge/Jeep/Ram Vehicles Rev. 051915 ***Only applicable to revision 1.1.2 firmware on BCI-CH21*** Class 2 J1850 VPW Arbitration J1850 Class
Navigation Unlock & Reverse Camera Input Interface for Chrysler/Dodge/Jeep/Ram Vehicles Rev. 051915 ***Only applicable to revision 1.1.2 firmware on BCI-CH21*** Class 2 J1850 VPW Arbitration J1850 Class
Abstract. GLV User Manual 1
 GLV User Manual 1 Abstract This user manual is a high level document that explains all operational procedures and techniques needed to operate the GLV system in a safe and effective manner. Anyone operating
GLV User Manual 1 Abstract This user manual is a high level document that explains all operational procedures and techniques needed to operate the GLV system in a safe and effective manner. Anyone operating
MDrive Plus Stepper motors with integrated electronics. MDrive 34ac Plus Motion Control fully programmable
 MDrive Plus Stepper motors with integrated electronics MDrive 34ac Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
MDrive Plus Stepper motors with integrated electronics MDrive 34ac Plus Description MDrive Plus Presentation The MDrive Plus is a 1.8 2-phase stepper motor with on-board fully programmable motion controller,
DRTS 64. The new generation of advanced test equipment for Relays, Energy meters, Transducers and Power quality meters.
 The new generation of advanced test equipment for Relays, Energy meters, Transducers and Power quality meters Testing all relay technologies: electromechanical, solid state, numerical and IEC61850 Manual
The new generation of advanced test equipment for Relays, Energy meters, Transducers and Power quality meters Testing all relay technologies: electromechanical, solid state, numerical and IEC61850 Manual
Embedded Vision Systémy - využití ve výuce a v průmyslu
 Embedded Vision Systémy - využití ve výuce a v průmyslu Radim ŠTEFAN NI Embedded Vision NI Smart Cameras NI CVS Compact Vision System NI EVS Embedded Vision System 2 NI Embedded Vision - continued NI CompactRIO
Embedded Vision Systémy - využití ve výuce a v průmyslu Radim ŠTEFAN NI Embedded Vision NI Smart Cameras NI CVS Compact Vision System NI EVS Embedded Vision System 2 NI Embedded Vision - continued NI CompactRIO
Indoor navigation using smartphones. Chris Hide IESSG, University of Nottingham, UK
 Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Indoor navigation using smartphones Chris Hide IESSG, University of Nottingham, UK Overview Smartphones Available sensors Current positioning methods Positioning research at IESSG 1. Wi-Fi fingerprinting
Build and Test Plan: IGV Team
 Build and Test Plan: IGV Team 2/6/2008 William Burke Donaldson Diego Gonzales David Mustain Ray Laser Range Finder Week 3 Jan 29 The laser range finder will be set-up in the lab and connected to the computer
Build and Test Plan: IGV Team 2/6/2008 William Burke Donaldson Diego Gonzales David Mustain Ray Laser Range Finder Week 3 Jan 29 The laser range finder will be set-up in the lab and connected to the computer
Calibration of Inertial Measurement Units Using Pendulum Motion
 Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
Technical Paper Int l J. of Aeronautical & Space Sci. 11(3), 234 239 (2010) DOI:10.5139/IJASS.2010.11.3.234 Calibration of Inertial Measurement Units Using Pendulum Motion Keeyoung Choi* and Se-ah Jang**
Complete Barrel Measuring and Inspection System. PS Series. User s manual
 Complete Barrel Measuring and Inspection System PS Series User s manual SAFETY PRECAUTIONS... 3 ELECTROMAGNETIC COMPATIBILITY... 3 LASER SAFETY... 3 GENERAL INFORMATION... 3 BASIC DATA AND PERFORMANCE
Complete Barrel Measuring and Inspection System PS Series User s manual SAFETY PRECAUTIONS... 3 ELECTROMAGNETIC COMPATIBILITY... 3 LASER SAFETY... 3 GENERAL INFORMATION... 3 BASIC DATA AND PERFORMANCE
ADVANCED CRAWLER TECHNOLOGIES
 ADVANCED CRAWLER TECHNOLOGIES 233 Jan Smuts Ave Parktown North Johannesburg South Africa Tel. 27 10 900 4073 www.ryonic.io info@ryonic.io Product Overview RMIS Key Features Overview The RMIS crawler is
ADVANCED CRAWLER TECHNOLOGIES 233 Jan Smuts Ave Parktown North Johannesburg South Africa Tel. 27 10 900 4073 www.ryonic.io info@ryonic.io Product Overview RMIS Key Features Overview The RMIS crawler is
Internal Vehicle Cameras
 Internal Vehicle Cameras INTRODUCTION Content E-3 WHAT IS ADH? E-4 VG-JC-PC485: 1.3 MP LOW-LIGHT PEOPLE COUNTING IP CAMERA E-5 Key E-5 Product Introduction E-5 E-6 Product E-6 VG-VG-JC-MC1205: INSIDE VEHICLE
Internal Vehicle Cameras INTRODUCTION Content E-3 WHAT IS ADH? E-4 VG-JC-PC485: 1.3 MP LOW-LIGHT PEOPLE COUNTING IP CAMERA E-5 Key E-5 Product Introduction E-5 E-6 Product E-6 VG-VG-JC-MC1205: INSIDE VEHICLE
501, , 1052, , 1602, 1604 EXCEL EXCEL 1602UC EXCEL 1052UC EXCEL 501HC. Micro-Vu Corporation. Precision Measurement Systems
 501, 502 1051, 1052, 1054 1601, 1602, 1604 1602UC 1052UC 501HC Precision Measurement Systems 501, 502 1051, 1052, 1054 1601, 1602, 1604 Excel 501 HM/HC Excel 502 HM/HC Excel 501 Excel 502 Scale Resolution
501, 502 1051, 1052, 1054 1601, 1602, 1604 1602UC 1052UC 501HC Precision Measurement Systems 501, 502 1051, 1052, 1054 1601, 1602, 1604 Excel 501 HM/HC Excel 502 HM/HC Excel 501 Excel 502 Scale Resolution
ebox Gold/Extreme for MyChron4 User Manual
 for MyChron4 This user manual is copyright of Aim srl. All procedures here explained can change also substantially. Please check website to get the most recent ones. Aim reserves the right of periodically
for MyChron4 This user manual is copyright of Aim srl. All procedures here explained can change also substantially. Please check website to get the most recent ones. Aim reserves the right of periodically