Impact of Intensity Edge Map on Segmentation of Noisy Range Images
|
|
|
- Myrtle Carroll
- 5 years ago
- Views:
Transcription
1 Impact of Intensity Edge Map on Segmentation of Noisy Range Images Yan Zhang 1, Yiyong Sun 1, Hamed Sari-Sarraf, Mongi A. Abidi 1 1 IRIS Lab, Dept. of ECE, University of Tennessee, Knoxville, TN , USA Dept. of EE, Texas Tech University, Lubbock, TX , USA ABSTRACT In this paper, we investigate the impact of intensity edge maps (IEMs) on the segmentation of noisy range images. Two edgebased segmentation algorithms are considered. The first is a watershed-based segmentation technique and the other is the scan-line grouping technique. Each of these algorithms is implemented in two different forms. In the first form, an IEM is fused with the range edge map prior to segmentation. In the second form, the range edge map alone is used. The performance of each algorithm, with and without the use of the IEM information, is evaluated and reported in terms of correct segmentation rate. For our experiments, two sets of real range images are used. The first set comprises inherently noisy images. The other set is composed of images with varying levels of artificial, additive Gaussian noise. The experimental results indicate that the use of IEMs can significantly improve edge-based segmentation of noisy range images. Considering these results, it seems that segmentation tasks involving range images captured by noisy scanners would benefit from the use of IEM information. Additionally, the experiments indicate that higher quality edge information can be obtained by fusing range and intensity edge information. Keywords: range image segmentation, edge detection, edge fusion, watershed 1. INTRODUCTION Most range segmentation algorithms can be generally classified as either region-based or edge-based. In the region-based techniques, such as [1] for example, pixels having similar properties are grouped together. In the edge-based techniques, such as [], discontinuities are identified and segmentation is guided by the obtained boundaries. Consequently, the segmentation performance of the edge-based techniques is significantly dependent on the quality of the edge map. In this work, two edge-based, range image segmentation techniques are investigated. The first is the watershed-based technique [3,4] that uses the fused edge map from its input range and intensity images. The second technique is scan-line grouping [5-7], which operates only on range data and is independent of the intensity image and its edge map. In experiments, it is observed that these two algorithms demonstrate very similar performance when processing images that are not very noisy. However, the watershed-based method performs much better when processing more noisy images. In this paper, we seek the reason for this difference. For noisy images, it can be observed that the watershed-based algorithm extracts much better edge maps the than the scan-line algorithm. This can be mostly attributed to the high quality intensity edge map (IEM) used by the watershed algorithm in addition to the edge map extracted from the noisy range image. We hypothesize that the poor edge map used in the scan-line grouping algorithm is the direct cause of poor segmentation performance in noisy images. This hypothesis stimulates the work in this paper. In this paper, we present an experiment designed to evaluate the impact of the IEM on the segmentation of noisy range images. The remainder of this paper proceeds as follows. In Section, an evaluation framework is proposed and the two algorithms are described. In Section 3, the experimental methods and results are presented Finally, conclusions are presented in Section 4.. EVALUATION FRAMEWORK.1 Evaluation Method The impact of the IEM on the segmentation of noisy range images is investigated by comparing the outcomes of the two algorithms (watershed and scan-line grouping) applied to noisy range data in two different forms each. In the first form, intensity edge information is utilized by fusing the IEM with the detected range edges prior to segmentation. This is the form of the watershed technique by design, but the edge fusion step must be added to the scan-line approach. In the second form, the range edge information alone is used. This, of course, is the natural form of the scan-line grouping technique, but the edge fusion step of the watershed approach must be removed in this case. Overall, this approach serves to evaluate the performance of each technique according to its dependency on the IEM.
2 . Watershed-based Segmentation Algorithm The watershed-based segmentation algorithm traces its origin to [3], with several enhancements suggested in [4]. The flowchart of this algorithm is shown in Figure 1 and begins with a pair of range and intensity images captured from a single view. First, preprocessing (median filtering and anisotropic diffusion) is done to reduce the noise while preserving the edges. Once the noise has been reduced, the gradient magnitude of the range and intensity image and the gradient magnitude of the surface normal from the range image are calculated. Step and roof edges from the range image and the step edges from the intensity image are obtained. Subsequently, edge fusion is performed to incorporate all of these into the final, fused edge map. Finally, the watershed-based segmentation operates on the fused edge map and the segmented result is obtained. Range Image Intensity Image Preprocessing: median filter and anisotropic diffusion filter Filtered Range Image Filtered Intensity Image Gradient magnitude of range image Gradient of surface normal Gradient magnitude of intensity image Edge Fusion Watershed Segmentation Fused edge map Figure 1. The flowchart of watershed segmentation algorithm The two major steps in the watershed-technique are (1) Edge Extraction and Fusion and () Watershed Segmentation. They can be described as follows. 1. Edge extraction and fusion This involves identifying step and roof edges. After the preprocessing of both range and intensity data, the edges are extracted separately. For the range data, step edges are identified by the gradient magnitude and roof edges are located by calculating the gradient magnitude of the 3-D surface normal. For the intensity data, step edges are determined by the gradient magnitude of the raw data. Since the resulting gradient values are not bounded, they must be remapped to values between 0 and 1.0 so that fusion can be performed. The remapping is done by the following equations: where f ( ) k f ' = 1 e, k = p f /100 ' f is the remapped feature map, f is the original feature map, p is the remapping percentage and f is the mean value of f. The edges from the intensity gradient, range gradient and surface normal gradient are then fused by the Bernoulli's rule of combination: 1 (1 a) (1 b) (1 c) where a, b, and c represent the three edge maps.
3 . Watershed segmentation The principle underlying the morphological watershed is that a symbolic drop of water, placed on a pixel of high gradient, will drain down to a pixel that has regional minimum gradient value. Each pixel lying in the descending path of this drop of water will be associated with that same regional minimum to form catchment basins, and the basins will ultimately identify distinct regions with different labels. Each local minimum has an associated segment defined by its catchment basin. The basic principle of this algorithm is shown in the one-dimensional case in Figure. Drop of water Regional minimum Labeled Region Catchment basin Figure. Forming of catchment basins: (left) flow of water from high gradient to regional minimum, (right) catchment basin formed by watershed algorithm The segmentation proceeds as follows. First, an image boundary is set so that no water can flow outside the bounds of the image indices. Next, all single pixel regional minima and all flat regions are located and labeled. All pixels that are not members of flat regions are then tracked to their local minima. This tracking is done by following the path of steepest descent of the four neighbors of each visited pixel. Each subsequent pixel visited is marked and given the label of the single-pixel regional minimum, flat basin, or flat plateau that it ultimately reaches. This step terminates when it reaches a state where all four neighbors are greater than or equal to the present pixel value. Next, all remaining unlabeled flat regions are traced to their respective regional minimum. All pixels in the image are then labeled with a distinct region label and locally maximum flat regions and region boundary pixels are marked. Finally, all individual regions bounded by the marked edges are sequentially labeled to create a segmented image..3 Scan Line Grouping Segmentation Algorithm This algorithm is selected due to its better segmentation performance and computational expense according to the comparison result in [5]. The steps of this algorithm are as follows [6,7]: 1. Scan-line approximation technique The only assumption made by scan line approximation is that an image row or column corresponds to a curve in a three-dimensional plane that results from the intersection of the plane with the surfaces of objects in the scene. This assumption is satisfied by most range scanners. A curved surface can be approximated by a quadratic polynomial: i j z = f ( x, y) = aij x y where z = f ( x, y) is the surface of an object and z = f ( x, y0 ) is the two-dimensional curve in x-z plane. The scan line projection on x-z plane can be represented as: z = a x + bx + c where a = a0, b = a10 + a11 y0, and c = a00 + a01 y0 + a0 y0. From the quadratic approximation, it is apparent that each scan line can be partitioned into a set of straight lines or curve segments. All points on a smooth segment belong to the same surface patch. All the points lying on the boundaries between two surfaces are edge points. The adapted classical splitting algorithm is used for scan-line splitting. In case of planar segmentation, the straight line segments are searched and the initial segment is determined by two end points of the scan-line. For curved surface segmentation, a quadratic approximation is computed based on the midpoint and two end points. When the maximum error between the approximation function and the scan line is bigger than a preset threshold, the scan line is spilt into two parts. The splitting is repeated until the approximation error is less than the threshold.. Edge detection In this step, only the end points of a curve segment are considered as potential edge points. Step edge strength is defined as: i+ j
4 f 1( x) f ( x) where x is the mid-point between two split segments. This implies that the step edge is not only determined by the height difference, but also by the angle between two adjacent curve segments. Roof edge strength is defined as: ( ( ),1) ( ( ),1) 1 f x 1 f x cos. f ( x),1 f ( x),1 1 Since the maximum value of discontinuity may not be observed in one particular direction, the scan line approximation is carried out in four directions: row, column, and two diagonal directions. The maximum value of all four directions is regarded as edge strength value. The step and roof edge strength values are then thresholded separately. Finally, a pixel is accepted as an edge point if at least one thresholding operation is successful. 3. Segmentation into planar and curved surfaces This step is a grouping process based on a hypothesis generation and verification approach. From the edge map, regions can be found by component labeling. Although there is a gap closing procedure in the edge detection, gaps often still exist in the edge map. Therefore, initial grouping usually results in under-segmentation. To recognize the correctly segmented and under-segmented regions, a region test is performed on each region of the initial segmentation. If the region test succeeds, the corresponding region is accepted. Otherwise the edge points within the region are dilated once, hopefully closing the gap. The hypothesis generation (component labeling) and verification (region test) are carried out for each region. This process is recursively conducted until the generated regions have been successfully verified or they are no longer considered due to small region size. The region test starts with a plane test, in which the principal component method is used to compute the plane function of a region. The region is regarded as a plane if both the RMS and average fitting error are small enough. If the test fails, the second surface approximation is computed by a fourth degree polynomial. Similarly, the region acceptance is also based on the RMS and average fitting error. After the grouping process, a post-processing step is performed to merge the pixels that have remained unlabeled. Such pixels are merged into an adjacent region if the fitting error is tolerable. 3. EXPERIMENTAL RESULTS The experiment essentially consists of observing the output of the above two segmentation algorithms while reversing their utilization of the IEM. To reverse the utilization for the watershed-based segmentation technique, the intensity edge map is simply removed from the edge fusion process. For the scan-line grouping technique, the reversal is achieved by the inclusion of an edge fusion step, in which the range edge map and IEM are fused into the final edge map before further segmentation processing. The segmentation performance of each algorithm, with and without utilizing the IEM, is then evaluated via its correct segmentation rate. This rate is defined as the percentage of regions in the machine-segmented output that match their counterparts in the ground truth segmentation by at least K% of the pixels. The experiment is conducted on two real image sets we refer to them as A and B taken by a Perceptron laser range scanner. Set A was taken in our lab and contains 15 inherently noisy images of size Set B comprises images obtained from web site at the University of South Florida[5]. The images of set B have been corrupted with Gaussian noise of varying standard deviation. Considering the inherent noise in the images, the standard deviation of the added noise varies from 1% ~ 3%. Ground truth for the experiment is manually specified for each image and consists of segmented regions and the correspondence of each region to the surface in the scene that it represents. 3.1 Watershed-based segmentation algorithm 1. Free parameters and sensitivity analysis Table 1 shows the free parameters in the watershed algorithm and how sensitive the performance of the algorithm is to each. Here sensitivity represents a subjective measure: low sensitivity indicates that the parameter is highly robust and can be used for a variety of images, while high sensitivity indicates that the parameter is highly sensitive and may need to be adjusted for various images. In each image set, five images are used as a training set to acquire good values for the free parameters.




 intensity edge map (IEM), (e) roof edges from range data, (f) fused range")
5 Table 1. Free parameters in watershed segmentation. Processing step Parameters Range of values Sensitivity Anisotropic Diffusion Kr 0.1~3.0 Medium Anisotropic Diffusion Ka 0.1~0.0 Medium Anisotropic Diffusion Kn 1.0~10.0 Medium Edge extraction Pr: weight of range magnitude 00~300 Low Edge extraction Pa: weight of intensity magnitude 00~300 Low Edge extraction Pn: weight of surface normal 50~00 Low Watershed segmentation D: watershed depth 0.1~0.5 Medium (a) (b) (c) (g) (h) (i) Figure 3. The experimental results of watershed-based segmentation with and without using the IEM on an image in set A: (a) raw range data, (b) raw intensity data, (c) step edges from range data, (d) intensity edge map (IEM), (e) roof edges from range data, (f) fused range edge map with IEM, (g) fused range edge map without IEM, (h) segmentation result using IEM and (i) segmentation result without using IEM.
 is much more complete and accurate than the range edge map without IEM information in (g).")
. This is due to the severe noise in the raw range data of (a).")

 has much better quality than the range edge map in (g). Consequently, the final segmentation result in (h) is much better than that in (i).")
 (b) (c) (g) (h) (i) Figure 4.")
6 . Experimental results Results of the watershed-based segmentation are shown in Figures 3-5. In these figures, it is obvious that the fused edge map with IEM information in (f) is much more complete and accurate than the range edge map without IEM information in (g). In Figure 3, for example, the two boundary lines between the walls are detected as edges clearly and completely using the IEM as shown in (f), but are completely missed without IEM fusion as shown in (g). This is due to the severe noise in the raw range data of (a). This is also observed with the boundary lines between the wall and the floor. The more complete and accurate edges extracted using the IEM results in the much better final segmentation. Nearly all the surfaces are segmented correctly in (h), but floor and wall regions are missed in (i). Similar results can be observed in Figures 4 and 5. The fused edge map in (f) has much better quality than the range edge map in (g). Consequently, the final segmentation result in (h) is much better than that in (i). According to the statistical results of the data sets, with a threshold of K% = 50%, it was observed that the average correct segmentation rate degraded greatly from 70% to 0% for set A and 6% to 8% for set B when IEM fusion was disabled. (a) (b) (c) (g) (h) (i) Figure 4. The experimental results of watershed-based segmentation with and without using the IEM on an image in set B (no added noise): (a) raw range data, (b) raw intensity data, (c) step edges from range data, (d) intensity edge map (IEM), (e) roof edges from range data, (f) fused range edge map with IEM, (g) fused range edge map without IEM, (h) segmentation result using IEM and (i) segmentation result without using IEM.
:")
 fused range edge map without IEM, (h) segmentation result using IEM and (i) segmentation result without using IEM. 3.")

 Affects edge, over-segmentation if small Roof Edge 30.")
7 (a) (b) (c) (g) (h) (i) Figure 5. The experimental results of watershed-based segmentation with and without using the IEM on an image in set B (1% standard deviation Gaussian noise added): (a) raw range data, (b) raw intensity data, (c) step edges from range data, (d) intensity edge map (IEM), (e) roof edges from range data, (f) fused range edge map with IEM, (g) fused range edge map without IEM, (h) segmentation result using IEM and (i) segmentation result without using IEM. 3. Scan-line grouping segmentation algorithm 1. Free parameters and sensitivity analysis Table gives the free parameters and their effect on the scan-line grouping algorithm. Table. Free parameters for scan-line grouping algorithm and their effects. Parameters Value Effect Segment Tolerance 6 (6-1) Affects edge map and speed Segment Length 3(<3) Edges not clear if increased Step Edge 5.0(5-0) Affects edge, over-segmentation if small Roof Edge 30.0(0-30) Over-segmentation if small Minimum Region Area 00 Depends on image size and application RMS error(plane) 1 Under-segmentation if small AVG error(plane) 1 Noisy result if too small RMS error(curve) 0.1 Low sensitivity AVG error(curve) 0.1 Low sensitivity Postprocess Factor 3 Useful for smoothing noise
 is much more complete and accurate than that without the IEM in (c).")

, but a few under-segmentations and over-segmentations occur in (i) - the left surface in the left object is over-segmented into four regions and")

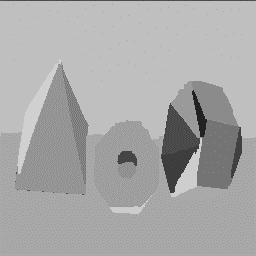
8 . Experimental Results The experimental results of the scan-line grouping segmentation are shown in Figures 6-8. From these figures, it is obvious that the fused edge map using the IEM in (d) is much more complete and accurate than that without the IEM in (c). In Figure 7, for example, the edge map without IEM is very noisy and a few boundary lines in the right object are missed. On the other hand, the edge map with IEM is cleaner and more complete - nearly all the boundary lines in the three objects and the floor are extracted correctly. The better edges extracted with the IEM results in a much better final segmentation. Nearly all the surfaces are segmented correctly in (f), but a few under-segmentations and over-segmentations occur in (i) - the left surface in the left object is over-segmented into four regions and the three surfaces in the right object are merged into one region by under-segmentation. Note additionally that the wall and the floor are correctly segmented if the fused edge map using IEM is used instead of only the range edge map. Similar results are observed in Figures 7 and 8. The fused edge map in (d) has much better quality than the range edge map in (c). Consequently, the final segmentation result in (f) is much better than that in (e). (a) (b) (c) Figure 6. The experimental results of scan-line grouping segmentation with and without using the IEM on an image in set A: (a) raw range data (b) raw intensity data (c) edge map without using IEM (d) fused edge map using IEM (e) segmentation result without using IEM (f) segmentation result using IEM. 3.3 Average correct segmentation rate Table 3 shows the average correct segmentation rates of the two algorithms, with and without using IEM fusion. The threshold K% = 50% is selected, implying that at least 50% of the pixels in the machine segmented regions should match their counterparts in the ground truth. From the results in Table 3, it is evident that the use of the IEM provides a significant performance improvement in the case of noisy range images. Table 3. Average correct segmentation rates Set A Set B / 0% noise added Set B / 1% noise added Watershed 70% 64% 60% Scan-line, with IEM 70% 75% 73% Watershed, no IEM 0% 5% 1% Scan-line 30% 64% 7%

 raw intensity data (c) edge map without using IEM (d)")
 segmentation result using IEM. (a) (b) (c) Figure 8.")
: (a) raw (f) segmentation result using IEM.")
9 (a) (b) (c) Figure 7. The experimental results of scan-line grouping segmentation with and without using the IEM on an image in set B (no added noise): (a) raw range data (b) raw intensity data (c) edge map without using IEM (d) fused edge map using IEM (e) segmentation result without using IEM (f) segmentation result using IEM. (a) (b) (c) Figure 8. The experimental results of scan-line grouping segmentation with and without using the IEM on an image in set B (1% standard deviation Gaussian noise added): (a) raw range data (b) raw intensity data (c) edge map without using IEM (d) fused edge map using IEM (e) segmentation result without using IEM (f) segmentation result using IEM.
10 4. CONCLUSIONS This paper investigates the impact of the intensity edge map (IEM) on the segmentation of noisy range images. We study the performance of two segmentation algorithms applied to the noisy range data with and without the use of the IEM. The performance is experimentally evaluated and reported via the correct segmentation rate. The results indicate that the IEM makes a significant, positive impact on the segmentation of noisy range images. These results can be attributed to the fact that the two segmentation algorithms are both edge-based and intensity images are indispensable in providing higher quality edge information. The utility of this information should be seriously considered for noisy range scanners. As many range scanners and structured light scanners acquire both range and intensity data simultaneously, there is no further hardware cost to incorporate the intensity data in segmentation or other processing. Although computation time is nearly doubled for segmentation purposes, the significant performance improvements, coupled with ever-increasing processor speeds, indicate that the method is both worthwhile and feasible. ACKNOWLEDGMENTS This work was supported by DOE s University Research Program in Robotics (URPR), grant number DOE-DE- FG0-86NE REFERENCES 1. P. J. Besl, J. B. Birch, and L. T. Watson, Robust window operators, Machine Vision and Applications, vol., pp , T. J. Fan, G. Medioni, and R. Nevatia, Segmented description of 3-D surfaces, IEEE Transactions on Robotics and Automation, vol. 3, no.6, pp , Dec, M. Baccar, Surface characterization using a Gaussian weighted least squares technique towards segmentation of range images, Master's thesis, The University of Tennessee, Knoxville, Eric Lester, Feature extraction, image segmentation and surface fitting: the development of a 3D scene reconstruction system, Master thesis. May Department of Electrical Engineering. University of Tennessee, Knoxville. 5. Mark Powell, Comparing curved-surface range image segmenters, Master s thesis. August Department of Computer science and Engineering, University of South Florida. 6. X.Y.Jiang, H.Bunke, Robust edge detection in range images based on scan line approximation, Technical Report IAM , Dept. of Computer Science, Univ. of Bern, Jiang, X., Bunke, H., Meier, U, Towards (quasi) real-time range image segmentation, in Bolles, R.C., Bunke, H., Noltemeier, H. (eds.): Intelligent Robots - Sensing, Modeling and Planning, World Scientific Publ. Co., Singapore, 1997, pp
Triangular Mesh Segmentation Based On Surface Normal
 ACCV2002: The 5th Asian Conference on Computer Vision, 23--25 January 2002, Melbourne, Australia. Triangular Mesh Segmentation Based On Surface Normal Dong Hwan Kim School of Electrical Eng. Seoul Nat
ACCV2002: The 5th Asian Conference on Computer Vision, 23--25 January 2002, Melbourne, Australia. Triangular Mesh Segmentation Based On Surface Normal Dong Hwan Kim School of Electrical Eng. Seoul Nat
THE preceding chapters were all devoted to the analysis of images and signals which
 Chapter 5 Segmentation of Color, Texture, and Orientation Images THE preceding chapters were all devoted to the analysis of images and signals which take values in IR. It is often necessary, however, to
Chapter 5 Segmentation of Color, Texture, and Orientation Images THE preceding chapters were all devoted to the analysis of images and signals which take values in IR. It is often necessary, however, to
Experiments with Edge Detection using One-dimensional Surface Fitting
 Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Experiments with Edge Detection using One-dimensional Surface Fitting Gabor Terei, Jorge Luis Nunes e Silva Brito The Ohio State University, Department of Geodetic Science and Surveying 1958 Neil Avenue,
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION INTRODUCTION
 BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION Ruijin Ma Department Of Civil Engineering Technology SUNY-Alfred Alfred, NY 14802 mar@alfredstate.edu ABSTRACT Building model reconstruction has been
BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION Ruijin Ma Department Of Civil Engineering Technology SUNY-Alfred Alfred, NY 14802 mar@alfredstate.edu ABSTRACT Building model reconstruction has been
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
WATERSHED, HIERARCHICAL SEGMENTATION AND WATERFALL ALGORITHM
 WATERSHED, HIERARCHICAL SEGMENTATION AND WATERFALL ALGORITHM Serge Beucher Ecole des Mines de Paris, Centre de Morphologie Math«ematique, 35, rue Saint-Honor«e, F 77305 Fontainebleau Cedex, France Abstract
WATERSHED, HIERARCHICAL SEGMENTATION AND WATERFALL ALGORITHM Serge Beucher Ecole des Mines de Paris, Centre de Morphologie Math«ematique, 35, rue Saint-Honor«e, F 77305 Fontainebleau Cedex, France Abstract
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation
 Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation Jong Taek Lee, M. S. Ryoo, Matthew Riley, and J. K. Aggarwal Computer & Vision Research Center Dept. of Electrical & Computer Engineering,
Real-time Detection of Illegally Parked Vehicles Using 1-D Transformation Jong Taek Lee, M. S. Ryoo, Matthew Riley, and J. K. Aggarwal Computer & Vision Research Center Dept. of Electrical & Computer Engineering,
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Model-based segmentation and recognition from range data
 Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Today INF How did Andy Warhol get his inspiration? Edge linking (very briefly) Segmentation approaches
 Segmentation approaches") INF 4300 14.10.09 Image segmentation How did Andy Warhol get his inspiration? Sections 10.11 Edge linking 10.2.7 (very briefly) 10.4 10.5 10.6.1 Anne S. Solberg Today Segmentation approaches 1. Region
INF 4300 14.10.09 Image segmentation How did Andy Warhol get his inspiration? Sections 10.11 Edge linking 10.2.7 (very briefly) 10.4 10.5 10.6.1 Anne S. Solberg Today Segmentation approaches 1. Region
Edge Grouping Combining Boundary and Region Information
 University of South Carolina Scholar Commons Faculty Publications Computer Science and Engineering, Department of 10-1-2007 Edge Grouping Combining Boundary and Region Information Joachim S. Stahl Song
University of South Carolina Scholar Commons Faculty Publications Computer Science and Engineering, Department of 10-1-2007 Edge Grouping Combining Boundary and Region Information Joachim S. Stahl Song
Image Segmentation Based on Watershed and Edge Detection Techniques
 0 The International Arab Journal of Information Technology, Vol., No., April 00 Image Segmentation Based on Watershed and Edge Detection Techniques Nassir Salman Computer Science Department, Zarqa Private
0 The International Arab Journal of Information Technology, Vol., No., April 00 Image Segmentation Based on Watershed and Edge Detection Techniques Nassir Salman Computer Science Department, Zarqa Private
An Improvement of the Occlusion Detection Performance in Sequential Images Using Optical Flow
 , pp.247-251 http://dx.doi.org/10.14257/astl.2015.99.58 An Improvement of the Occlusion Detection Performance in Sequential Images Using Optical Flow Jin Woo Choi 1, Jae Seoung Kim 2, Taeg Kuen Whangbo
, pp.247-251 http://dx.doi.org/10.14257/astl.2015.99.58 An Improvement of the Occlusion Detection Performance in Sequential Images Using Optical Flow Jin Woo Choi 1, Jae Seoung Kim 2, Taeg Kuen Whangbo
Image Segmentation. Ross Whitaker SCI Institute, School of Computing University of Utah
 Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Image Analysis Image Segmentation (Basic Methods)
") Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Image Analysis Image Segmentation (Basic Methods) Christophoros Nikou cnikou@cs.uoi.gr Images taken from: R. Gonzalez and R. Woods. Digital Image Processing, Prentice Hall, 2008. Computer Vision course
Evaluation of Moving Object Tracking Techniques for Video Surveillance Applications
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2015INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Evaluation
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
REGION & EDGE BASED SEGMENTATION
 INF 4300 Digital Image Analysis REGION & EDGE BASED SEGMENTATION Today We go through sections 10.1, 10.2.7 (briefly), 10.4, 10.5, 10.6.1 We cover the following segmentation approaches: 1. Edge-based segmentation
INF 4300 Digital Image Analysis REGION & EDGE BASED SEGMENTATION Today We go through sections 10.1, 10.2.7 (briefly), 10.4, 10.5, 10.6.1 We cover the following segmentation approaches: 1. Edge-based segmentation
Uncertainties: Representation and Propagation & Line Extraction from Range data
 41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
41 Uncertainties: Representation and Propagation & Line Extraction from Range data 42 Uncertainty Representation Section 4.1.3 of the book Sensing in the real world is always uncertain How can uncertainty
DATA EMBEDDING IN TEXT FOR A COPIER SYSTEM
 DATA EMBEDDING IN TEXT FOR A COPIER SYSTEM Anoop K. Bhattacharjya and Hakan Ancin Epson Palo Alto Laboratory 3145 Porter Drive, Suite 104 Palo Alto, CA 94304 e-mail: {anoop, ancin}@erd.epson.com Abstract
DATA EMBEDDING IN TEXT FOR A COPIER SYSTEM Anoop K. Bhattacharjya and Hakan Ancin Epson Palo Alto Laboratory 3145 Porter Drive, Suite 104 Palo Alto, CA 94304 e-mail: {anoop, ancin}@erd.epson.com Abstract
Operators-Based on Second Derivative double derivative Laplacian operator Laplacian Operator Laplacian Of Gaussian (LOG) Operator LOG
 Operator LOG") Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Operators-Based on Second Derivative The principle of edge detection based on double derivative is to detect only those points as edge points which possess local maxima in the gradient values. Laplacian
Document Image Restoration Using Binary Morphological Filters. Jisheng Liang, Robert M. Haralick. Seattle, Washington Ihsin T.
 Document Image Restoration Using Binary Morphological Filters Jisheng Liang, Robert M. Haralick University of Washington, Department of Electrical Engineering Seattle, Washington 98195 Ihsin T. Phillips
Document Image Restoration Using Binary Morphological Filters Jisheng Liang, Robert M. Haralick University of Washington, Department of Electrical Engineering Seattle, Washington 98195 Ihsin T. Phillips
Image Segmentation. Ross Whitaker SCI Institute, School of Computing University of Utah
 Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Image Segmentation Ross Whitaker SCI Institute, School of Computing University of Utah What is Segmentation? Partitioning images/volumes into meaningful pieces Partitioning problem Labels Isolating a specific
Cover Page. Abstract ID Paper Title. Automated extraction of linear features from vehicle-borne laser data
 Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Cover Page Abstract ID 8181 Paper Title Automated extraction of linear features from vehicle-borne laser data Contact Author Email Dinesh Manandhar (author1) dinesh@skl.iis.u-tokyo.ac.jp Phone +81-3-5452-6417
Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data. Christopher Weed
 Data. Christopher Weed") Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data Christopher Weed Final Report EE 381K Multidimensional Digital Signal Processing December 11, 2000 Abstract A Laser Altimetry (LIDAR)
Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data Christopher Weed Final Report EE 381K Multidimensional Digital Signal Processing December 11, 2000 Abstract A Laser Altimetry (LIDAR)
Logical Templates for Feature Extraction in Fingerprint Images
 Logical Templates for Feature Extraction in Fingerprint Images Bir Bhanu, Michael Boshra and Xuejun Tan Center for Research in Intelligent Systems University of Califomia, Riverside, CA 9252 1, USA Email:
Logical Templates for Feature Extraction in Fingerprint Images Bir Bhanu, Michael Boshra and Xuejun Tan Center for Research in Intelligent Systems University of Califomia, Riverside, CA 9252 1, USA Email:
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Line Segment Based Watershed Segmentation
 Line Segment Based Watershed Segmentation Johan De Bock 1 and Wilfried Philips Dep. TELIN/TW07, Ghent University Sint-Pietersnieuwstraat 41, B-9000 Ghent, Belgium jdebock@telin.ugent.be Abstract. In this
Line Segment Based Watershed Segmentation Johan De Bock 1 and Wilfried Philips Dep. TELIN/TW07, Ghent University Sint-Pietersnieuwstraat 41, B-9000 Ghent, Belgium jdebock@telin.ugent.be Abstract. In this
A Fast Sequential Rainfalling Watershed Segmentation Algorithm
 A Fast Sequential Rainfalling Watershed Segmentation Algorithm Johan De Bock, Patrick De Smet, and Wilfried Philips Ghent University, Belgium jdebock@telin.ugent.be Abstract. In this paper we present a
A Fast Sequential Rainfalling Watershed Segmentation Algorithm Johan De Bock, Patrick De Smet, and Wilfried Philips Ghent University, Belgium jdebock@telin.ugent.be Abstract. In this paper we present a
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Building Reliable 2D Maps from 3D Features
 Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
Building Reliable 2D Maps from 3D Features Dipl. Technoinform. Jens Wettach, Prof. Dr. rer. nat. Karsten Berns TU Kaiserslautern; Robotics Research Lab 1, Geb. 48; Gottlieb-Daimler- Str.1; 67663 Kaiserslautern;
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
N.Priya. Keywords Compass mask, Threshold, Morphological Operators, Statistical Measures, Text extraction
 Volume, Issue 8, August ISSN: 77 8X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Combined Edge-Based Text
Volume, Issue 8, August ISSN: 77 8X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Combined Edge-Based Text
Keywords: Thresholding, Morphological operations, Image filtering, Adaptive histogram equalization, Ceramic tile.
 Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Blobs and Cracks
Volume 3, Issue 7, July 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Blobs and Cracks
Fingerprint Image Enhancement Algorithm and Performance Evaluation
 Fingerprint Image Enhancement Algorithm and Performance Evaluation Naja M I, Rajesh R M Tech Student, College of Engineering, Perumon, Perinad, Kerala, India Project Manager, NEST GROUP, Techno Park, TVM,
Fingerprint Image Enhancement Algorithm and Performance Evaluation Naja M I, Rajesh R M Tech Student, College of Engineering, Perumon, Perinad, Kerala, India Project Manager, NEST GROUP, Techno Park, TVM,
Image Enhancement Techniques for Fingerprint Identification
 March 2013 1 Image Enhancement Techniques for Fingerprint Identification Pankaj Deshmukh, Siraj Pathan, Riyaz Pathan Abstract The aim of this paper is to propose a new method in fingerprint enhancement
March 2013 1 Image Enhancement Techniques for Fingerprint Identification Pankaj Deshmukh, Siraj Pathan, Riyaz Pathan Abstract The aim of this paper is to propose a new method in fingerprint enhancement
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS
 METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
METRIC PLANE RECTIFICATION USING SYMMETRIC VANISHING POINTS M. Lefler, H. Hel-Or Dept. of CS, University of Haifa, Israel Y. Hel-Or School of CS, IDC, Herzliya, Israel ABSTRACT Video analysis often requires
Segmentation
 Lecture 6: Segmentation 24--4 Robin Strand Centre for Image Analysis Dept. of IT Uppsala University Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
Lecture 6: Segmentation 24--4 Robin Strand Centre for Image Analysis Dept. of IT Uppsala University Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
Three-Dimensional Computer Vision
 \bshiaki Shirai Three-Dimensional Computer Vision With 313 Figures ' Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Table of Contents 1 Introduction 1 1.1 Three-Dimensional Computer Vision
\bshiaki Shirai Three-Dimensional Computer Vision With 313 Figures ' Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Table of Contents 1 Introduction 1 1.1 Three-Dimensional Computer Vision
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Segmentation of Images
 Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
Segmentation of Images SEGMENTATION If an image has been preprocessed appropriately to remove noise and artifacts, segmentation is often the key step in interpreting the image. Image segmentation is a
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Histogram and watershed based segmentation of color images
 Histogram and watershed based segmentation of color images O. Lezoray H. Cardot LUSAC EA 2607 IUT Saint-Lô, 120 rue de l'exode, 50000 Saint-Lô, FRANCE Abstract A novel method for color image segmentation
Histogram and watershed based segmentation of color images O. Lezoray H. Cardot LUSAC EA 2607 IUT Saint-Lô, 120 rue de l'exode, 50000 Saint-Lô, FRANCE Abstract A novel method for color image segmentation
Digital Image Processing. Prof. P.K. Biswas. Department of Electronics & Electrical Communication Engineering
 Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Digital Image Processing Prof. P.K. Biswas Department of Electronics & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Image Segmentation - III Lecture - 31 Hello, welcome
Bioimage Informatics
 Bioimage Informatics Lecture 14, Spring 2012 Bioimage Data Analysis (IV) Image Segmentation (part 3) Lecture 14 March 07, 2012 1 Outline Review: intensity thresholding based image segmentation Morphological
Bioimage Informatics Lecture 14, Spring 2012 Bioimage Data Analysis (IV) Image Segmentation (part 3) Lecture 14 March 07, 2012 1 Outline Review: intensity thresholding based image segmentation Morphological
Region & edge based Segmentation
 INF 4300 Digital Image Analysis Region & edge based Segmentation Fritz Albregtsen 06.11.2018 F11 06.11.18 IN5520 1 Today We go through sections 10.1, 10.4, 10.5, 10.6.1 We cover the following segmentation
INF 4300 Digital Image Analysis Region & edge based Segmentation Fritz Albregtsen 06.11.2018 F11 06.11.18 IN5520 1 Today We go through sections 10.1, 10.4, 10.5, 10.6.1 We cover the following segmentation
Pedestrian Detection Using Correlated Lidar and Image Data EECS442 Final Project Fall 2016
 edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
edestrian Detection Using Correlated Lidar and Image Data EECS442 Final roject Fall 2016 Samuel Rohrer University of Michigan rohrer@umich.edu Ian Lin University of Michigan tiannis@umich.edu Abstract
Chapter 11 Arc Extraction and Segmentation
 Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Chapter 11 Arc Extraction and Segmentation 11.1 Introduction edge detection: labels each pixel as edge or no edge additional properties of edge: direction, gradient magnitude, contrast edge grouping: edge
Including the Size of Regions in Image Segmentation by Region Based Graph
 International Journal of Emerging Engineering Research and Technology Volume 3, Issue 4, April 2015, PP 81-85 ISSN 2349-4395 (Print) & ISSN 2349-4409 (Online) Including the Size of Regions in Image Segmentation
International Journal of Emerging Engineering Research and Technology Volume 3, Issue 4, April 2015, PP 81-85 ISSN 2349-4395 (Print) & ISSN 2349-4409 (Online) Including the Size of Regions in Image Segmentation
Computer Vision. Image Segmentation. 10. Segmentation. Computer Engineering, Sejong University. Dongil Han
 Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
Computer Vision 10. Segmentation Computer Engineering, Sejong University Dongil Han Image Segmentation Image segmentation Subdivides an image into its constituent regions or objects - After an image has
BUILDING EXTRACTION AND RECONSTRUCTION FROM LIDAR DATA. Zheng Wang. EarthData International Gaithersburg, Maryland USA
 BUILDING EXTRACTION AND RECONSTRUCTION FROM LIDAR DATA Zheng Wang EarthData International Gaithersburg, Maryland USA zwang@earthdata.com Tony Schenk Department of Civil Engineering The Ohio State University
BUILDING EXTRACTION AND RECONSTRUCTION FROM LIDAR DATA Zheng Wang EarthData International Gaithersburg, Maryland USA zwang@earthdata.com Tony Schenk Department of Civil Engineering The Ohio State University
Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data
 Data") Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data Literature Survey Christopher Weed October 2000 Abstract Laser altimetry (LIDAR) data must be processed to generate a digital elevation
Generate Digital Elevation Models Using Laser Altimetry (LIDAR) Data Literature Survey Christopher Weed October 2000 Abstract Laser altimetry (LIDAR) data must be processed to generate a digital elevation
MULTIVIEW REPRESENTATION OF 3D OBJECTS OF A SCENE USING VIDEO SEQUENCES
 MULTIVIEW REPRESENTATION OF 3D OBJECTS OF A SCENE USING VIDEO SEQUENCES Mehran Yazdi and André Zaccarin CVSL, Dept. of Electrical and Computer Engineering, Laval University Ste-Foy, Québec GK 7P4, Canada
MULTIVIEW REPRESENTATION OF 3D OBJECTS OF A SCENE USING VIDEO SEQUENCES Mehran Yazdi and André Zaccarin CVSL, Dept. of Electrical and Computer Engineering, Laval University Ste-Foy, Québec GK 7P4, Canada
AN EFFICIENT BINARIZATION TECHNIQUE FOR FINGERPRINT IMAGES S. B. SRIDEVI M.Tech., Department of ECE
 AN EFFICIENT BINARIZATION TECHNIQUE FOR FINGERPRINT IMAGES S. B. SRIDEVI M.Tech., Department of ECE sbsridevi89@gmail.com 287 ABSTRACT Fingerprint identification is the most prominent method of biometric
AN EFFICIENT BINARIZATION TECHNIQUE FOR FINGERPRINT IMAGES S. B. SRIDEVI M.Tech., Department of ECE sbsridevi89@gmail.com 287 ABSTRACT Fingerprint identification is the most prominent method of biometric
AUTOMATIC EXTRACTION OF BUILDING ROOFS FROM PICTOMETRY S ORTHOGONAL AND OBLIQUE IMAGES
 AUTOMATIC EXTRACTION OF BUILDING ROOFS FROM PICTOMETRY S ORTHOGONAL AND OBLIQUE IMAGES Yandong Wang Pictometry International Corp. Suite A, 100 Town Centre Dr., Rochester, NY14623, the United States yandong.wang@pictometry.com
AUTOMATIC EXTRACTION OF BUILDING ROOFS FROM PICTOMETRY S ORTHOGONAL AND OBLIQUE IMAGES Yandong Wang Pictometry International Corp. Suite A, 100 Town Centre Dr., Rochester, NY14623, the United States yandong.wang@pictometry.com
Research Article Image Segmentation Using Gray-Scale Morphology and Marker-Controlled Watershed Transformation
 Discrete Dynamics in Nature and Society Volume 2008, Article ID 384346, 8 pages doi:10.1155/2008/384346 Research Article Image Segmentation Using Gray-Scale Morphology and Marker-Controlled Watershed Transformation
Discrete Dynamics in Nature and Society Volume 2008, Article ID 384346, 8 pages doi:10.1155/2008/384346 Research Article Image Segmentation Using Gray-Scale Morphology and Marker-Controlled Watershed Transformation
Image Segmentation. Srikumar Ramalingam School of Computing University of Utah. Slides borrowed from Ross Whitaker
 Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Image Segmentation Srikumar Ramalingam School of Computing University of Utah Slides borrowed from Ross Whitaker Segmentation Semantic Segmentation Indoor layout estimation What is Segmentation? Partitioning
Range Image Registration with Edge Detection in Spherical Coordinates
 Range Image Registration with Edge Detection in Spherical Coordinates Olcay Sertel 1 and Cem Ünsalan2 Computer Vision Research Laboratory 1 Department of Computer Engineering 2 Department of Electrical
Range Image Registration with Edge Detection in Spherical Coordinates Olcay Sertel 1 and Cem Ünsalan2 Computer Vision Research Laboratory 1 Department of Computer Engineering 2 Department of Electrical
1. INTRODUCTION 2012 DSRC
 2012 DSRC Sri Lakshmi U* 1, Mr. Siva Rama Krishna K* 2, Dr.Raja Prakash Rao P* 3 1. II.M.Tech-CSE, TRREC 2. Associate Professor, Dept of CSE, TRREC 3. Professor & Head, Dept of CSE, TRREC Abstract: This
2012 DSRC Sri Lakshmi U* 1, Mr. Siva Rama Krishna K* 2, Dr.Raja Prakash Rao P* 3 1. II.M.Tech-CSE, TRREC 2. Associate Professor, Dept of CSE, TRREC 3. Professor & Head, Dept of CSE, TRREC Abstract: This
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Lecture: Segmentation I FMAN30: Medical Image Analysis. Anders Heyden
 Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
Lecture: Segmentation I FMAN30: Medical Image Analysis Anders Heyden 2017-11-13 Content What is segmentation? Motivation Segmentation methods Contour-based Voxel/pixel-based Discussion What is segmentation?
Segmentation
 Lecture 6: Segmentation 215-13-11 Filip Malmberg Centre for Image Analysis Uppsala University 2 Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
Lecture 6: Segmentation 215-13-11 Filip Malmberg Centre for Image Analysis Uppsala University 2 Today What is image segmentation? A smörgåsbord of methods for image segmentation: Thresholding Edge-based
A MAP Algorithm for AVO Seismic Inversion Based on the Mixed (L 2, non-l 2 ) Norms to Separate Primary and Multiple Signals in Slowness Space
 Norms to Separate Primary and Multiple Signals in Slowness Space") A MAP Algorithm for AVO Seismic Inversion Based on the Mixed (L 2, non-l 2 ) Norms to Separate Primary and Multiple Signals in Slowness Space Harold Ivan Angulo Bustos Rio Grande do Norte State University
A MAP Algorithm for AVO Seismic Inversion Based on the Mixed (L 2, non-l 2 ) Norms to Separate Primary and Multiple Signals in Slowness Space Harold Ivan Angulo Bustos Rio Grande do Norte State University
Perceptual Quality Improvement of Stereoscopic Images
 Perceptual Quality Improvement of Stereoscopic Images Jong In Gil and Manbae Kim Dept. of Computer and Communications Engineering Kangwon National University Chunchon, Republic of Korea, 200-701 E-mail:
Perceptual Quality Improvement of Stereoscopic Images Jong In Gil and Manbae Kim Dept. of Computer and Communications Engineering Kangwon National University Chunchon, Republic of Korea, 200-701 E-mail:
An Efficient Single Chord-based Accumulation Technique (SCA) to Detect More Reliable Corners
 to Detect More Reliable Corners") An Efficient Single Chord-based Accumulation Technique (SCA) to Detect More Reliable Corners Mohammad Asiful Hossain, Abdul Kawsar Tushar, and Shofiullah Babor Computer Science and Engineering Department,
An Efficient Single Chord-based Accumulation Technique (SCA) to Detect More Reliable Corners Mohammad Asiful Hossain, Abdul Kawsar Tushar, and Shofiullah Babor Computer Science and Engineering Department,
Accelerating Pattern Matching or HowMuchCanYouSlide?
 Accelerating Pattern Matching or HowMuchCanYouSlide? Ofir Pele and Michael Werman School of Computer Science and Engineering The Hebrew University of Jerusalem {ofirpele,werman}@cs.huji.ac.il Abstract.
Accelerating Pattern Matching or HowMuchCanYouSlide? Ofir Pele and Michael Werman School of Computer Science and Engineering The Hebrew University of Jerusalem {ofirpele,werman}@cs.huji.ac.il Abstract.
Model Based Perspective Inversion
 Model Based Perspective Inversion A. D. Worrall, K. D. Baker & G. D. Sullivan Intelligent Systems Group, Department of Computer Science, University of Reading, RG6 2AX, UK. Anthony.Worrall@reading.ac.uk
Model Based Perspective Inversion A. D. Worrall, K. D. Baker & G. D. Sullivan Intelligent Systems Group, Department of Computer Science, University of Reading, RG6 2AX, UK. Anthony.Worrall@reading.ac.uk
Comparison between Various Edge Detection Methods on Satellite Image
 Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Comparison between Various Edge Detection Methods on Satellite Image H.S. Bhadauria 1, Annapurna Singh 2, Anuj Kumar 3 Govind Ballabh Pant Engineering College ( Pauri garhwal),computer Science and Engineering
Image Segmentation for Image Object Extraction
 Image Segmentation for Image Object Extraction Rohit Kamble, Keshav Kaul # Computer Department, Vishwakarma Institute of Information Technology, Pune kamble.rohit@hotmail.com, kaul.keshav@gmail.com ABSTRACT
Image Segmentation for Image Object Extraction Rohit Kamble, Keshav Kaul # Computer Department, Vishwakarma Institute of Information Technology, Pune kamble.rohit@hotmail.com, kaul.keshav@gmail.com ABSTRACT
CS4670: Computer Vision Noah Snavely
 CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
CS4670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 released, due Friday, September 7 1 Edge detection Convert a 2D image into a set of curves Extracts
Digital Image Processing Lecture 7. Segmentation and labeling of objects. Methods for segmentation. Labeling, 2 different algorithms
 Digital Image Processing Lecture 7 p. Segmentation and labeling of objects p. Segmentation and labeling Region growing Region splitting and merging Labeling Watersheds MSER (extra, optional) More morphological
Digital Image Processing Lecture 7 p. Segmentation and labeling of objects p. Segmentation and labeling Region growing Region splitting and merging Labeling Watersheds MSER (extra, optional) More morphological
COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS
 COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS Shubham Saini 1, Bhavesh Kasliwal 2, Shraey Bhatia 3 1 Student, School of Computing Science and Engineering, Vellore Institute of Technology, India,
COMPARATIVE STUDY OF IMAGE EDGE DETECTION ALGORITHMS Shubham Saini 1, Bhavesh Kasliwal 2, Shraey Bhatia 3 1 Student, School of Computing Science and Engineering, Vellore Institute of Technology, India,
Modified Watershed Segmentation with Denoising of Medical Images
 Modified Watershed Segmentation with Denoising of Medical Images Usha Mittal 1, Sanyam Anand 2 M.Tech student, Dept. of CSE, Lovely Professional University, Phagwara, Punjab, India 1 Assistant Professor,
Modified Watershed Segmentation with Denoising of Medical Images Usha Mittal 1, Sanyam Anand 2 M.Tech student, Dept. of CSE, Lovely Professional University, Phagwara, Punjab, India 1 Assistant Professor,
Connected Component Analysis and Change Detection for Images
 Connected Component Analysis and Change Detection for Images Prasad S.Halgaonkar Department of Computer Engg, MITCOE Pune University, India Abstract Detection of the region of change in images of a particular
Connected Component Analysis and Change Detection for Images Prasad S.Halgaonkar Department of Computer Engg, MITCOE Pune University, India Abstract Detection of the region of change in images of a particular
Transactions on Information and Communications Technologies vol 16, 1996 WIT Press, ISSN
 ransactions on Information and Communications echnologies vol 6, 996 WI Press, www.witpress.com, ISSN 743-357 Obstacle detection using stereo without correspondence L. X. Zhou & W. K. Gu Institute of Information
ransactions on Information and Communications echnologies vol 6, 996 WI Press, www.witpress.com, ISSN 743-357 Obstacle detection using stereo without correspondence L. X. Zhou & W. K. Gu Institute of Information
Morphological Technique in Medical Imaging for Human Brain Image Segmentation
 Morphological Technique in Medical Imaging for Human Brain Segmentation Asheesh Kumar, Naresh Pimplikar, Apurva Mohan Gupta, Natarajan P. SCSE, VIT University, Vellore INDIA Abstract: Watershed Algorithm
Morphological Technique in Medical Imaging for Human Brain Segmentation Asheesh Kumar, Naresh Pimplikar, Apurva Mohan Gupta, Natarajan P. SCSE, VIT University, Vellore INDIA Abstract: Watershed Algorithm
Noise Reduction in Image Sequences using an Effective Fuzzy Algorithm
 Noise Reduction in Image Sequences using an Effective Fuzzy Algorithm Mahmoud Saeid Khadijeh Saeid Mahmoud Khaleghi Abstract In this paper, we propose a novel spatiotemporal fuzzy based algorithm for noise
Noise Reduction in Image Sequences using an Effective Fuzzy Algorithm Mahmoud Saeid Khadijeh Saeid Mahmoud Khaleghi Abstract In this paper, we propose a novel spatiotemporal fuzzy based algorithm for noise
Filtering of impulse noise in digital signals using logical transform
 Filtering of impulse noise in digital signals using logical transform Ethan E. Danahy* a, Sos S. Agaian** b, Karen A. Panetta*** a a Dept. of Electrical and Computer Eng., Tufts Univ., 6 College Ave.,
Filtering of impulse noise in digital signals using logical transform Ethan E. Danahy* a, Sos S. Agaian** b, Karen A. Panetta*** a a Dept. of Electrical and Computer Eng., Tufts Univ., 6 College Ave.,
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Advance Shadow Edge Detection and Removal (ASEDR)
") International Journal of Computational Intelligence Research ISSN 0973-1873 Volume 13, Number 2 (2017), pp. 253-259 Research India Publications http://www.ripublication.com Advance Shadow Edge Detection
International Journal of Computational Intelligence Research ISSN 0973-1873 Volume 13, Number 2 (2017), pp. 253-259 Research India Publications http://www.ripublication.com Advance Shadow Edge Detection
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Detecting and Identifying Moving Objects in Real-Time
 Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
Chapter 9 Detecting and Identifying Moving Objects in Real-Time For surveillance applications or for human-computer interaction, the automated real-time tracking of moving objects in images from a stationary
REPRESENTATION REQUIREMENTS OF AS-IS BUILDING INFORMATION MODELS GENERATED FROM LASER SCANNED POINT CLOUD DATA
 REPRESENTATION REQUIREMENTS OF AS-IS BUILDING INFORMATION MODELS GENERATED FROM LASER SCANNED POINT CLOUD DATA Engin Burak Anil 1 *, Burcu Akinci 1, and Daniel Huber 2 1 Department of Civil and Environmental
REPRESENTATION REQUIREMENTS OF AS-IS BUILDING INFORMATION MODELS GENERATED FROM LASER SCANNED POINT CLOUD DATA Engin Burak Anil 1 *, Burcu Akinci 1, and Daniel Huber 2 1 Department of Civil and Environmental
Mine Boundary Detection Using Markov Random Field Models
 Mine Boundary Detection Using Markov Random Field Models Xia Hua and Jennifer Davidson Department of Electrical & Computer Engineering Iowa State University Noel Cressie Department of Statistics Iowa State
Mine Boundary Detection Using Markov Random Field Models Xia Hua and Jennifer Davidson Department of Electrical & Computer Engineering Iowa State University Noel Cressie Department of Statistics Iowa State
Fast 3D Edge Detection by Using Decision Tree from Depth Image
 015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 8 - Oct, 015. Hamburg, Germany Fast 3D Edge Detection by Using Decision Tree from Depth Image
015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 8 - Oct, 015. Hamburg, Germany Fast 3D Edge Detection by Using Decision Tree from Depth Image
REGARDING THE WATERSHED...
 REGARDING THE WATERSHED... Serge BEUCHER Center of Mathematical Morphology Paris School of Mines THE WATERSHED TRANSFORMATION in SEGMENTATION The Watershed transformation has proven to be an efficient
REGARDING THE WATERSHED... Serge BEUCHER Center of Mathematical Morphology Paris School of Mines THE WATERSHED TRANSFORMATION in SEGMENTATION The Watershed transformation has proven to be an efficient
Identifying Layout Classes for Mathematical Symbols Using Layout Context
 Rochester Institute of Technology RIT Scholar Works Articles 2009 Identifying Layout Classes for Mathematical Symbols Using Layout Context Ling Ouyang Rochester Institute of Technology Richard Zanibbi
Rochester Institute of Technology RIT Scholar Works Articles 2009 Identifying Layout Classes for Mathematical Symbols Using Layout Context Ling Ouyang Rochester Institute of Technology Richard Zanibbi
Text Extraction in Video
 International Journal of Computational Engineering Research Vol, 03 Issue, 5 Text Extraction in Video 1, Ankur Srivastava, 2, Dhananjay Kumar, 3, Om Prakash Gupta, 4, Amit Maurya, 5, Mr.sanjay kumar Srivastava
International Journal of Computational Engineering Research Vol, 03 Issue, 5 Text Extraction in Video 1, Ankur Srivastava, 2, Dhananjay Kumar, 3, Om Prakash Gupta, 4, Amit Maurya, 5, Mr.sanjay kumar Srivastava
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
Extensions of One-Dimensional Gray-level Nonlinear Image Processing Filters to Three-Dimensional Color Space
 Extensions of One-Dimensional Gray-level Nonlinear Image Processing Filters to Three-Dimensional Color Space Orlando HERNANDEZ and Richard KNOWLES Department Electrical and Computer Engineering, The College
Extensions of One-Dimensional Gray-level Nonlinear Image Processing Filters to Three-Dimensional Color Space Orlando HERNANDEZ and Richard KNOWLES Department Electrical and Computer Engineering, The College
A GABOR FILTER-BASED APPROACH TO FINGERPRINT RECOGNITION
 A GABOR FILTER-BASED APPROACH TO FINGERPRINT RECOGNITION Chih-Jen Lee and Sheng-De Wang Dept. of Electrical Engineering EE Building, Rm. 441 National Taiwan University Taipei 106, TAIWAN sdwang@hpc.ee.ntu.edu.tw
A GABOR FILTER-BASED APPROACH TO FINGERPRINT RECOGNITION Chih-Jen Lee and Sheng-De Wang Dept. of Electrical Engineering EE Building, Rm. 441 National Taiwan University Taipei 106, TAIWAN sdwang@hpc.ee.ntu.edu.tw
SINGLE IMAGE ORIENTATION USING LINEAR FEATURES AUTOMATICALLY EXTRACTED FROM DIGITAL IMAGES
 SINGLE IMAGE ORIENTATION USING LINEAR FEATURES AUTOMATICALLY EXTRACTED FROM DIGITAL IMAGES Nadine Meierhold a, Armin Schmich b a Technical University of Dresden, Institute of Photogrammetry and Remote
SINGLE IMAGE ORIENTATION USING LINEAR FEATURES AUTOMATICALLY EXTRACTED FROM DIGITAL IMAGES Nadine Meierhold a, Armin Schmich b a Technical University of Dresden, Institute of Photogrammetry and Remote
Restoring Warped Document Image Based on Text Line Correction
 Restoring Warped Document Image Based on Text Line Correction * Dep. of Electrical Engineering Tamkang University, New Taipei, Taiwan, R.O.C *Correspondending Author: hsieh@ee.tku.edu.tw Abstract Document
Restoring Warped Document Image Based on Text Line Correction * Dep. of Electrical Engineering Tamkang University, New Taipei, Taiwan, R.O.C *Correspondending Author: hsieh@ee.tku.edu.tw Abstract Document
Integrating Intensity and Texture in Markov Random Fields Segmentation. Amer Dawoud and Anton Netchaev. {amer.dawoud*,
 Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118
Integrating Intensity and Texture in Markov Random Fields Segmentation Amer Dawoud and Anton Netchaev {amer.dawoud*, anton.netchaev}@usm.edu School of Computing, University of Southern Mississippi 118