3D Photography: Active Ranging, Structured Light, ICP
|
|
|
- Leon Hunt
- 5 years ago
- Views:
Transcription
1 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring
2 Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar 25 Apr 1 Apr 8 Apr 15 Apr 22 Apr 29 May 6 May 13 May 20 May 27 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Project Proposals by Students Lecture: Epipolar Geometry Lecture: Stereo Vision Easter Short lecture Stereo Vision (2) + 2 papers Project Updates Short lecture Active Ranging, Structured Light + 2 papers Short lecture Volumetric Modeling + 2 papers Short lecture Mesh-based Modeling + 2 papers Short lecture SfM, SLAM + 2 papers Pentecost / White Monday Final Demos

3 Structured light and active ranging techniques
4 Today s class Obtaining depth maps / range images unstructured light structured light time-of-flight Registering range images (some slides from Szymon Rusinkiewicz, Brian Curless)
5 Taxonomy 3D modeling passive active stereo structured/ unstructured shape from light silhouettes photometric stereo laser scanning


6 Unstructured light project texture to disambiguate stereo
7 Space-time stereo Davis, Ramamoothi, Rusinkiewicz, CVPR 03


8 Space-time stereo Davis, Ramamoothi, Rusinkiewicz, CVPR 03
9 Space-time stereo Zhang, Curless and Seitz, CVPR 03


10 Space-time stereo results Zhang, Curless and Seitz, CVPR 03


11 Light Transport Constancy Davis, Yang, Wang, ICCV05

12 Triangulation Light / Laser Camera Peak position in image reveals depth
13 Triangulation: Moving the Camera and Illumination Moving independently leads to problems with focus, resolution Most scanners mount camera and light source rigidly, move them as a unit, allows also for (partial) pre-calibration

14 Triangulation: Moving the Camera and Illumination
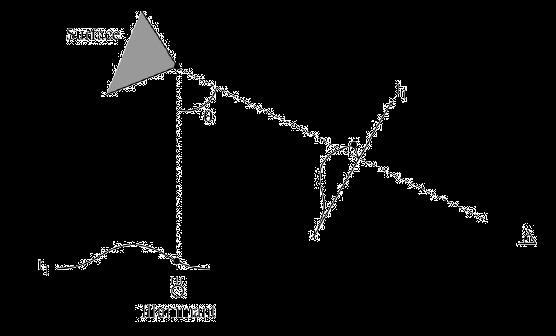
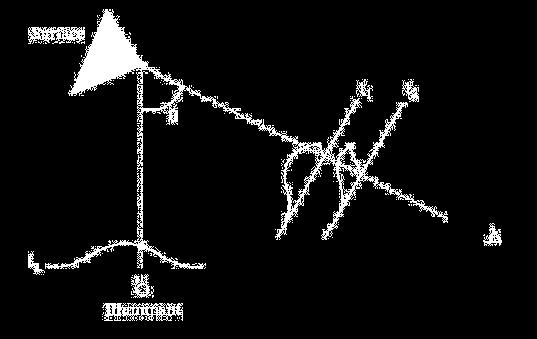
15 Triangulation: Extending to 3D Alternatives: project dot(s) or stripe(s) Object Laser Camera
16 Triangulation Scanner Issues Accuracy proportional to working volume (typical is ~1000:1) Scales down to small working volume (e.g. 5 cm. working volume, 50 µm. accuracy) Does not scale up (baseline too large ) Two-line-of-sight problem (shadowing from either camera or laser) Triangulation angle: non-uniform resolution if too small, shadowing if too big (useful range: )
17 Triangulation Scanner Issues Material properties (dark, specular) Subsurface scattering Laser speckle Edge curl Texture embossing Where is the exact (subpixel) spot position?
18
19 Space-time analysis Curless 95

20 Space-time analysis Curless 95




21 Projector as camera


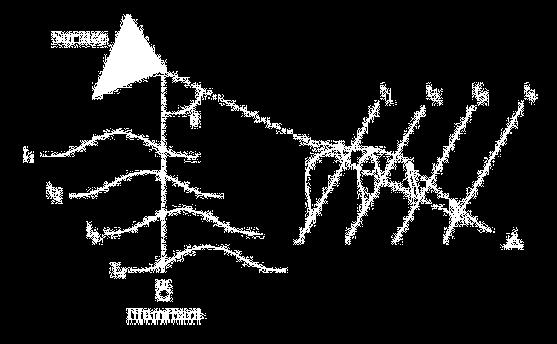
22 Multi-Stripe Triangulation To go faster, project multiple stripes But which stripe is which? Answer #1: assume surface continuity e.g. Eyetronics ShapeCam

23 Kinect Infrared projector Infrared camera Works indoors (no IR distraction) invisible for human Depth Map: note stereo shadows! Color Image (unused for depth) IR Image


24 Kinect Projector Pattern strong texture Correlation-based stereo between IR image and projected pattern possible stereo shadow Bad SNR / too close Homogeneous region, ambiguous without pattern

25 Multi-Stripe Triangulation To go faster, project multiple stripes But which stripe is which? Answer #2: colored stripes (or dots)

26 Multi-Stripe Triangulation To go faster, project multiple stripes But which stripe is which? Answer #3: time-coded stripes



27 Time-Coded Light Patterns Assign each stripe a unique illumination code over time [Posdamer 82] Time Space

28 Better codes Gray code Neighbors only differ one bit => Structured light presented afterwards




29 Poor man s scanner Bouguet and Perona, ICCV 98


, time")

30 Pulsed Time of Flight Basic idea: send out pulse of light (usually laser), time how long it takes to return d 1 = c t 2
31 Pulsed Time of Flight Advantages: Large working volume (up to 100 m.) Disadvantages: Not-so-great accuracy (at best ~5 mm.) Requires getting timing to ~30 picoseconds Does not scale with working volume Often used for scanning buildings, rooms, archeological sites, etc.

32 Depth cameras 2D array of time-of-flight sensors e.g. Canesta s CMOS 3D sensor jitter too big on single measurement, but averages out on many (10,000 measurements 100x improvement)

33 3D modeling Aligning range images Pairwise Globally (some slides from S. Rusinkiewicz, J. Ponce, )
34 Aligning 3D Data If correct correspondences are known (from feature matches, colors, ), it is possible to find correct relative rotation/translation
35 X 1 Aligning 3D Data X 2 T e.g. Kinect motion X 1 X 2 X i = T X i For T as general 4x4 matrix: Linear solution from 5 corrs. T is Euclidean Transform: 3 corrs. (using quaternions) [Horn87] Closed-form solution of absolute orientation using unit quaternions
36 Aligning 3D Data How to find corresponding points? Previous systems based on user input, feature matching, surface signatures, etc.
37 Spin Images [Johnson and Hebert 97] Signature that captures local shape Similar shapes similar spin images
38 Computing Spin Images Start with a point on a 3D model Find (averaged) surface normal at that point Define coordinate system centered at this point, oriented according to surface normal and two (arbitrary) tangents Express other points (within some distance) in terms of the new coordinates


39 Computing Spin Images Compute histogram of locations of other points, in new coordinate system, ignoring rotation around normal: α = p nˆ β = p nˆ radial dist. elevation

40 Computing Spin Images elevation radial dist.
41 Spin Image Parameters Size of neighborhood Determines whether local or global shape is captured Big neighborhood: more discriminative power Small neighborhood: resilience to clutter Size of bins in histogram: Big bins: less sensitive to noise Small bins: captures more detail
42 Alignment with Spin Image Compute spin image for each point / subset of points in both sets Find similar spin images => potential correspondences Compute alignment from correspondences Same problems as with image matching: - Robustness of descriptor vs. discriminative power - Mismatches => robust estimation required


43 Solving 3D puzzles with VIPs SIFT features Extracted from 2D images Variation due to viewpoint VIP features Extracted from 3D model Viewpoint invariant (Wu et al., CVPR08) 43

44 Aligning 3D Data Alternative: assume closest points correspond to each other, compute the best transform
 [Besl & McKay 92] Converges if starting position close")
45 Aligning 3D Data and iterate to find alignment Iterated Closest Points (ICP) [Besl & McKay 92] Converges if starting position close enough
46 ICP Variant Point-to-Plane Error Metric Using point-to-plane distance instead of point-topoint lets flat regions slide along each other more easily [Chen & Medioni 92]
47 Finding Corresponding Points Finding closest point is most expensive stage of ICP Brute force search O(n) Spatial data structure (e.g., k-d tree) O(log n) Voxel grid O(1), but large constant, slow preprocessing

48 Finding Corresponding Points For range images, simply project point [Blais/Levine 95] Constant-time, fast Does not require precomputing a spatial data structure
49 Efficient ICP Efficient Variants of the ICP algorithm [Rusinkiewicz & Levoy, 3DIM 2001] => Presented afterwards
50 Presentations [Scharstein/Szeliski 03]: High Accuracy Stereo Depth Maps using Structured Light [Rusinkiewicz/Levoy 01]: Efficient Variants of the ICP Algorithm
3D Photography: Stereo
 3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Photography: Stereo Marc Pollefeys, Torsten Sattler Spring 2016 http://www.cvg.ethz.ch/teaching/3dvision/ 3D Modeling with Depth Sensors Today s class Obtaining depth maps / range images unstructured
3D Scanning. Qixing Huang Feb. 9 th Slide Credit: Yasutaka Furukawa
 3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
3D Scanning Qixing Huang Feb. 9 th 2017 Slide Credit: Yasutaka Furukawa Geometry Reconstruction Pipeline This Lecture Depth Sensing ICP for Pair-wise Alignment Next Lecture Global Alignment Pairwise Multiple
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
5.2 Surface Registration
 Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Spring 2018 CSCI 621: Digital Geometry Processing 5.2 Surface Registration Hao Li http://cs621.hao-li.com 1 Acknowledgement Images and Slides are courtesy of Prof. Szymon Rusinkiewicz, Princeton University
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Binocular stereo. Given a calibrated binocular stereo pair, fuse it to produce a depth image. Where does the depth information come from?
 Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Binocular Stereo Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image Where does the depth information come from? Binocular stereo Given a calibrated binocular stereo
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Overview of Active Vision Techniques
 SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
SIGGRAPH 99 Course on 3D Photography Overview of Active Vision Techniques Brian Curless University of Washington Overview Introduction Active vision techniques Imaging radar Triangulation Moire Active
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
3D Photography. Marc Pollefeys, Torsten Sattler. Spring 2015
 3D Photography Marc Pollefeys, Torsten Sattler Spring 2015 Schedule (tentative) Feb 16 Feb 23 Mar 2 Mar 9 Mar 16 Mar 23 Mar 30 Apr 6 Apr 13 Apr 20 Apr 27 May 4 May 11 May 18 May 25 Introduction Geometry,
3D Photography Marc Pollefeys, Torsten Sattler Spring 2015 Schedule (tentative) Feb 16 Feb 23 Mar 2 Mar 9 Mar 16 Mar 23 Mar 30 Apr 6 Apr 13 Apr 20 Apr 27 May 4 May 11 May 18 May 25 Introduction Geometry,
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Perspective projection
 Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Sensors Ioannis Stamos Perspective projection Pinhole & the Perspective Projection (x,y) SCENE SCREEN Is there an image being formed on the screen?
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Photography: Epipolar geometry
 3D Photograph: Epipolar geometr Kalin Kolev, Marc Pollefes Spring 203 http://cvg.ethz.ch/teaching/203spring/3dphoto/ Schedule (tentative) Feb 8 Feb 25 Mar 4 Mar Mar 8 Mar 25 Apr Apr 8 Apr 5 Apr 22 Apr
3D Photograph: Epipolar geometr Kalin Kolev, Marc Pollefes Spring 203 http://cvg.ethz.ch/teaching/203spring/3dphoto/ Schedule (tentative) Feb 8 Feb 25 Mar 4 Mar Mar 8 Mar 25 Apr Apr 8 Apr 5 Apr 22 Apr
Depth Sensors Kinect V2 A. Fornaser
 Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Depth Sensors Kinect V2 A. Fornaser alberto.fornaser@unitn.it Vision Depth data It is not a 3D data, It is a map of distances Not a 3D, not a 2D it is a 2.5D or Perspective 3D Complete 3D - Tomography
Stereo vision. Many slides adapted from Steve Seitz
 Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Stereo vision Many slides adapted from Steve Seitz What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape What is
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
Stereo. Many slides adapted from Steve Seitz
 Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
Stereo Many slides adapted from Steve Seitz Binocular stereo Given a calibrated binocular stereo pair, fuse it to produce a depth image image 1 image 2 Dense depth map Binocular stereo Given a calibrated
3D Computer Vision 1
 3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D Computer Vision 1 Multiview Stereo Multiview Stereo Multiview Stereo https://www.youtube.com/watch?v=ugkb7itpnae Shape from silhouette Shape from silhouette Shape from silhouette Shape from silhouette
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Stereo and structured light
 Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Stereo and structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 20 Course announcements Homework 5 is still ongoing. - Make sure
Multi-view reconstruction for projector camera systems based on bundle adjustment
 Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Multi-view reconstruction for projector camera systems based on bundle adjustment Ryo Furuakwa, Faculty of Information Sciences, Hiroshima City Univ., Japan, ryo-f@hiroshima-cu.ac.jp Kenji Inose, Hiroshi
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light II. Guido Gerig CS 6320, Spring (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC)
") Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
Structured Light II Guido Gerig CS 6320, Spring 2013 (thanks: slides Prof. S. Narasimhan, CMU, Marc Pollefeys, UNC) http://www.cs.cmu.edu/afs/cs/academic/class/15385- s06/lectures/ppts/lec-17.ppt Variant
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Introduction to Mobile Robotics Iterative Closest Point Algorithm. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras
 Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Introduction to Mobile Robotics Iterative Closest Point Algorithm Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation 2 The Problem Given: two corresponding point sets: Wanted: translation
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Traditional pipeline for shape capture. Active range scanning. New pipeline for shape capture. Draw contours on model. Digitize lines with touch probe
 Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
Traditional pipeline for shape capture Draw contours on model Active range scanning Digitize lines with touch probe Fit smooth surfaces CAD/CAM Texturing and animation 1 2 New pipeline for shape capture
Rigid ICP registration with Kinect
 Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Rigid ICP registration with Kinect Students: Yoni Choukroun, Elie Semmel Advisor: Yonathan Aflalo 1 Overview.p.3 Development of the project..p.3 Papers p.4 Project algorithm..p.6 Result of the whole body.p.7
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Spacetime Stereo: A Unifying Framework for Depth from Triangulation. Abstract
 Spacetime Stereo: A Unifying Framework for Depth from Triangulation James Davis Diego Nehab Ravi Ramamoorthi Szymon Rusinkiewicz Honda Research Institute Princeton University Columbia University Princeton
Spacetime Stereo: A Unifying Framework for Depth from Triangulation James Davis Diego Nehab Ravi Ramamoorthi Szymon Rusinkiewicz Honda Research Institute Princeton University Columbia University Princeton
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
3D Computer Vision. Structured Light I. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light I Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Single Spin Image-ICP matching for Efficient 3D Object Recognition
 Single Spin Image-ICP matching for Efficient 3D Object Recognition Ernst Bovenkamp ernst.bovenkamp@tno.nl Arvid Halma arvid.halma@tno.nl Pieter Eendebak pieter.eendebak@tno.nl Frank ter Haar frank.terhaar@tno.nl
Single Spin Image-ICP matching for Efficient 3D Object Recognition Ernst Bovenkamp ernst.bovenkamp@tno.nl Arvid Halma arvid.halma@tno.nl Pieter Eendebak pieter.eendebak@tno.nl Frank ter Haar frank.terhaar@tno.nl
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
L2 Data Acquisition. Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods
 Structured light Range images Shape from shading Other methods") L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
L2 Data Acquisition Mechanical measurement (CMM) Structured light Range images Shape from shading Other methods 1 Coordinate Measurement Machine Touch based Slow Sparse Data Complex planning Accurate 2
Structured light , , Computational Photography Fall 2017, Lecture 27
 Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Structured light http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 27 Course announcements Homework 5 has been graded. - Mean: 129. - Median:
Scan Matching. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
Scan Matching Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Scan Matching Overview Problem statement: Given a scan and a map, or a scan and a scan,
The main problem of photogrammetry
 Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Structured Light Structured Light The main problem of photogrammetry to recover shape from multiple views of a scene, we need to find correspondences between the images the matching/correspondence problem
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
#$ % $ $& "$%% " $ '$ " '
 ! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
! " This section of the course covers techniques for pairwise (i.e., scanto-scan) and global (i.e., involving more than 2 scans) alignment, given that the algorithms are constrained to obtain a rigid-body
Optical Active 3D Scanning. Gianpaolo Palma
 Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Optical Active 3D Scanning Gianpaolo Palma 3D Scanning Taxonomy SHAPE ACQUISTION CONTACT NO-CONTACT NO DESTRUCTIVE DESTRUCTIVE X-RAY MAGNETIC OPTICAL ACOUSTIC CMM ROBOTIC GANTRY SLICING ACTIVE PASSIVE
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Outline. 1 Why we re interested in Real-Time tracking and mapping. 3 Kinect Fusion System Overview. 4 Real-time Surface Mapping
 Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Outline CSE 576 KinectFusion: Real-Time Dense Surface Mapping and Tracking PhD. work from Imperial College, London Microsoft Research, Cambridge May 6, 2013 1 Why we re interested in Real-Time tracking
Computational light transport
 Computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 19 Course announcements Homework 5 has been posted. - Due on
Computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 19 Course announcements Homework 5 has been posted. - Due on
CS 468 Data-driven Shape Analysis. Shape Descriptors
 CS 468 Data-driven Shape Analysis Shape Descriptors April 1, 2014 What Is A Shape Descriptor? Shapes Shape Descriptor F1=[f1, f2,.., fn] F2=[f1, f2,.., fn] F3=[f1, f2,.., fn] What Is A Shape Descriptor?
CS 468 Data-driven Shape Analysis Shape Descriptors April 1, 2014 What Is A Shape Descriptor? Shapes Shape Descriptor F1=[f1, f2,.., fn] F2=[f1, f2,.., fn] F3=[f1, f2,.., fn] What Is A Shape Descriptor?
Fundamental matrix. Let p be a point in left image, p in right image. Epipolar relation. Epipolar mapping described by a 3x3 matrix F
 Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix F Fundamental
More computational light transport
 More computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 23 Course announcements Sign-up for final project checkpoint
More computational light transport http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 23 Course announcements Sign-up for final project checkpoint
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a
 SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a a Institute of Geometry, Vienna University of Technology, Wiedner Hauptstr. 8 10, A
SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT Helmut Pottmann a, Stefan Leopoldseder a, Michael Hofer a a Institute of Geometry, Vienna University of Technology, Wiedner Hauptstr. 8 10, A
Algorithm research of 3D point cloud registration based on iterative closest point 1
 Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Acta Technica 62, No. 3B/2017, 189 196 c 2017 Institute of Thermomechanics CAS, v.v.i. Algorithm research of 3D point cloud registration based on iterative closest point 1 Qian Gao 2, Yujian Wang 2,3,
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
CS5670: Computer Vision Noah Snavely, Zhengqi Li Stereo Single image stereogram, by Niklas Een Mark Twain at Pool Table", no date, UCR Museum of Photography Stereo Given two images from different viewpoints
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS
 FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS Michael Wünstel, Thomas Röfer Technologie-Zentrum Informatik (TZI) Universität Bremen Postfach 330 440, D-28334 Bremen {wuenstel, roefer}@informatik.uni-bremen.de
FEATURE-BASED REGISTRATION OF RANGE IMAGES IN DOMESTIC ENVIRONMENTS Michael Wünstel, Thomas Röfer Technologie-Zentrum Informatik (TZI) Universität Bremen Postfach 330 440, D-28334 Bremen {wuenstel, roefer}@informatik.uni-bremen.de
3D scanning. 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects.
 Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Acquiring 3D shape 3D scanning 3D scanning is a family of technologies created as a means of automatic measurement of geometric properties of objects. The produced digital model is formed by geometric
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware
 Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Sensing Deforming and Moving Objects with Commercial Off the Shelf Hardware This work supported by: Philip Fong Florian Buron Stanford University Motivational Applications Human tissue modeling for surgical
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Surround Structured Lighting for Full Object Scanning
 Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Surround Structured Lighting for Full Object Scanning Douglas Lanman, Daniel Crispell, and Gabriel Taubin Brown University, Dept. of Engineering August 21, 2007 1 Outline Introduction and Related Work
Project Ideas. Guido Gerig CS 6643, Computer Vision Spring 2016
 Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual