Learning Fully Dense Neural Networks for Image Semantic Segmentation
|
|
|
- Rhoda Spencer
- 5 years ago
- Views:
Transcription
1 Learning Fully Dense Neural Networks for Image Semantic Segmentation Mingmin Zhen 1, Jinglu Wang 2, Lei Zhou 1, Tian Fang 3, Long Quan 1 1 Hong Kong University of Science and Technology, 2 Microsoft Research Asia, 3 Altizure.com {mzhen, lzhouai, quan}@cse.ust.hk, Jinglu.Wang@microsoft.com, fangtian@altizure.com Abstract Semantic segmentation is pixel-wise classification which retains critical spatial information. The feature map reuse has been commonly adopted in CNN based approaches to take advantage of feature maps in the early layers for the later spatial reconstruction. Along this direction, we go a step further by proposing a fully dense neural network with an encoderdecoder structure that we abbreviate as FDNet. For each stage in the decoder module, feature maps of all the previous blocks are adaptively aggregated to feedforward as input. On the one hand, it reconstructs the spatial boundaries accurately. On the other hand, it learns more efficiently with the more efficient gradient backpropagation. In addition, we propose boundaryaware loss function to focus more attention on the pixels near the boundary, which boosts the hard examples labeling. We have demonstrated the best performance of the FDNet on the two benchmark datasets: PASCAL VOC 2012, NYUDv2 over previous works when not considering training on other datasets. Introduction Recent works on semantic segmentation are mostly based on fully convolutional network (FCN) (Long, Shelhamer, and Darrell 2015). Generally, a pretrained classification network (VGGNet (Simonyan and Zisserman 2015), ResNet (He et al. 2016) and DenseNet (Huang et al. 2017)) is used as an encoder to generate a series of feature maps with rich semantic information at the higher layers. In order to obtain the probability map with the same resolution as the input image size, the decoder is adopted to recover the spatial resolution from the output of the encoder (Fig. 1 Top). The encoder-decoder structure is widely used for semantic segmentation (Vijay, Alex, and Roberto 2017; Long, Shelhamer, and Darrell 2015; Noh, Hong, and Han 2015; Zhao et al. 2017). The key difficulties for the encoder-decoder structure are twofold. First, as multiple stages of spatial pooling and convolutional strides are used to reduce the final feature map size in the encoder module, much spatial information is lost. This is hard to recover in the decoder module and leads to poor semantic segmentation results, especially for boundary localization. Second, the encoder-decoder Copyright c 2019, Association for the Advancement of Artificial Intelligence ( All rights reserved. Image Image Image 1/4 1/8 1/16 1/32 1/16 1/8 1/4 Output Output Output Figure 1: Different types of encoder-decoder structures for semantic segmentation. Top: basic encoder-decoder structure (e.g. DeconvNet (Noh, Hong, and Han 2015) and Seg- Net (Vijay, Alex, and Roberto 2017)) using multiple-stage decoder to predict masks, often results in very coarse pixel masks since spatial information is largely lost in the encoder module. Middle: Feature map reuse structures using previous feature maps of the encoder module achieves very good results in semantic segmentation tasks (Lin et al. 2017a; Islam et al. 2017; Ghiasi and Fowlkes 2016) and other related tasks (Pinheiro et al. 2016; Shen et al. 2017; Huang et al. 2018), but the potential of feature map reuse is not deeply released. Bottom: The proposed fully dense networks, using feature maps from all the previous blocks, are capable of capturing multi-scale information, of restoring the spatial information, and of benefitting the gradient backpropagation. structure has much deeper depth than the original encoder network for image classification tasks (such as VGGNet (Simonyan and Zisserman 2015), ResNet (He et al. 2016) and DenseNet (Huang et al. 2017)). This results in the training optimization problem as introduced in (He et al. 2016; Huang et al. 2017) though it has been partially solved by using batch normalization (BN) (Ioffe and Szegedy 2015). In order to address the spatial information loss problem, DeconvNet (Noh, Hong, and Han 2015) uses the unpooling layers to restore the spatial information by recording the locations of maximum activations during the pooling operation. However, this cannot completely solve the problem since only the location of maximum activations is restored. Another way to deal with this problem is to reuse the feature maps with rich spatial information of earlier layers. U-Net
.")
.")
 refines semantic feature maps from later layers with fine-grained feature maps from earlier layers. Similarly, G-FRNet (Islam et al.")



2 mean IOU (%) decoder module. As a result, basically each layer of FDNet has direct access to the gradients from loss layers. This will be very helpful to gradient propagation (Huang et al. 2017). (a) (b) (c) FDNet + boundary loss FDNet w/ feature reuse w/o feature reuse Trimap Width (pixels) Figure 2: Left: (a) original images; (b) trimap example with 1 pixels; (c) trimap example with 10 pixels. Right: semantic segmentation result within a band around the object boundaries for different methods (mean IOU). (Ronneberger, Fischer, and Brox 2015) exploits previous feature maps in the decoder module by skip connections structure (See Fig. 1 Middle). Furthermore, RefineNet (Lin et al. 2017a) refines semantic feature maps from later layers with fine-grained feature maps from earlier layers. Similarly, G-FRNet (Islam et al. 2017) adopts multi-stage gate units to make use of previous feature maps progressively. The feature map reuse significantly improves the restoration of spatial information. Meanwhile, it helps to capture multi-scale information from the multi-scale feature maps of earlier layers in the encoder module. In addition, it also boosts information flow and gradient backpropagation as the path from the earlier layers to the loss layer is shortened. However, the potential of feature map reuse is not completely revealed. In order to further improve the performance, we propose to reconstruct encoder-decoder neural network to form a fully dense neural network (See Fig. 1 Bottom). We refer to our neural network as FDNet. FDNet is a nearly symmetric encoder-decoder network and is easy to optimize. We choose DenseNet-264 (Huang et al. 2017) as the encoder, which achieves state-of-the-art results in the image classification tasks. The feature maps in the encoder module are beneficial to the decoder module. The decoder module is operated as an upsampling process to recover the spatial resolution, aiming for accurate boundary localization. The feature maps of different scale size (including feature maps in the decoder module) will be fully reused through adaptive aggregation structure, which will generate a fully dense connected structure. In general, cross entropy loss function is used to propagate the loss in previous works (Liu, Rabinovich, and Berg 2016; Lin et al. 2017a). The weakness of this method is that it sees all pixels as the same. As shown in Fig. 2, labeling for the pixels near the boundary (band width < 40) is not very accurate. In other words, the pixels near the boundary are hard examples, which need to be treated differently. Based on this observation, we propose a boundary-aware loss function, which pays more attention on the pixels near the boundary. Though attention based loss has been adopted in object detection task (Lin et al. 2017c), our boundary-aware loss comes from the prior that pixels near the boundary are hard examples. This is very different from focal loss, which pays more attention to the pixels with higher loss. In order to further boost training optimization, we use multiple losses for the output feature maps of the Related work Fully convolutional network (FCN) (Long, Shelhamer, and Darrell 2015) has improved the performance of semantic segmentation significantly. In the FCN architecture, a fully convolutional structure and bilinear interpolation are used to realize pixel-wise prediction, which results in coarse boundaries as large amounts of spatial information have been lost. Following the FCN method, many works (Vijay, Alex, and Roberto 2017; Lin et al. 2017a; Zhao et al. 2017) have tried to further improve the performance of semantic segmentation. Encoder-decoder. The encoder-decoder structure with a multi-stage decoder gradually recovers sharp object boundaries. DeconvNet (Noh, Hong, and Han 2015) and SegNet (Vijay, Alex, and Roberto 2017) employ symmetric encoderdecoder structures to restore spatial resolution by using unpooling layers. RefineNet (Lin et al. 2017a) and G-FRNet (Islam et al. 2017) also adopt a multi-stage decoder with feature map reuse in each stage of the decoder module. In LRR (Ghiasi and Fowlkes 2016), a multiplicative gating method is used to refine the feature map of each stage and a Laplacian reconstruction pyramid is used to fuse predictions. Moreover, (Fu et al. 2017) stacks many encoder-decoder architectures to capture multi-scale information. Following these works, we also use an encoder-decoder structure to generate pixel-wise prediction label maps. Feature map reuse. The feature maps in the higher layers tend to be invariant to translation and illumination. This invariance is crucial for specific tasks such as image classification, but is not ideal for semantic segmentation which requires precise spatial information, since important spatial relationships have been lost. Thus, the reuse of feature maps with rich spatial information of previous layers can boost the spatial structure reconstruction process. Furthermore, feature map reuse has also been used in object detection tasks (Shen et al. 2017; Lin et al. 2017b) and instance segmentation tasks (Pinheiro et al. 2016; He et al. 2017) to capture multi-scale information when considering the objects with different scales. In our architecture, we fully aggregate previous feature maps in the decoder module, which shows outstanding performances in the experiments. Fully dense neural networks In this section, we introduce the proposed fully dense neural network (FDNet), which is visualized in Fig. 3 comprehensively. We first introduce the whole architecture. Next, the adaptive aggregation structure for dense feature maps is presented in detail. At last, we show the boundary-aware loss function. Encoder-decoder architecture Our model (Fig. 3) is based on the deep encoder-decoder architecture (e.g. (Noh, Hong, and Han 2015; Vijay, Alex, and
.")

 and pixel-wise cross entropy loss is computed. Roberto 2017)).")
3 Fully Dense Net Up Bilinear Upsample Backward Adaptive aggregation Up Up Pooling Block 1 Pooling Block 2 Pooling Block 3 Block 4 Block 5 Block 6 Pooling Up H W H/4 W/4 H/8 W/8 H/16 W/16 H/32 W/32 H/16 W/16 H/8 W/8 H/4 W/4 H W Figure 3: Overview of the proposed fully dense neural network (FDNet). The feature maps (output of dense block 1, 2, 3, 4) of the encoder module and even the feature maps (output of dense block 5) of the decoder module are fully reused. The adaptive aggregation module combines feature maps from all the previous blocks to form new feature maps as the input of subsequent blocks. After an adaptive aggregation module or a dense block, a convolution layer is used to compress the feature maps. The aggregated feature maps are upsampled into size H W C (C is number of classes for labels) and pixel-wise cross entropy loss is computed. Roberto 2017)). The encoder module extracts features from an image and the decoder module produces semantic segmentation prediction. Encoder. Our encoder network is based on the DenseNet- 264 (Huang et al. 2017) while removing the softmax and fully connected layers of the original network (from the starting convolutional layer to dense block 4 in Fig. 3). The input of each convolutional layer within a dense block is the concatenation of all outputs of its previous layers at a given resolution. Given that x l is the output of the l th layer in a dense block, x l can be computed as follows: x l = H l ([x 0, x 1,..., x l 1 ]) (1) where [x 0, x 1,..., x l 1 ] denotes the concatenation operation of the feature maps x 0, x 1,..., x l 1, and x 0 is the input feature map of the dense block. Meanwhile, H l ( ) is defined as a composite function of operations: BN, ReLU, a 1 1 convolution operation followed by BN, ReLU, a 3 3 convolution operation. As a result, the output of a dense block includes feature maps from all the layers in this block. Each dense block is followed by a transition layer, which is to compress the number and the size of feature maps through 1 1 convolution and pooling layers. For an input image I, the encoder network produces 4 feature maps (B 1, B 2, B 3, B 4 ) with decreasing spatial resolution ( 1 4, 1 8, 1 16, 1 32 ). In order to reduce spatial information loss, we can remove the pooling layer before dense block 4 so that the output feature map of the last dense block (i.e. B 4 ) in the encoder module is 1 16 of the size. Atrous convolution is also used to control the spatial density of computed feature responses in the last block as suggested in (Chen et al. 2017). For this architecture, we refer to it as FDNet-16s. The original architecture can be taken as FDNet-32s. Decoder. As the encoder-decoder structure has much more layers than the original encoder network, how to boost gradient backpropagation and information flow becomes another problem we have to deal with. The decoder module progressively enlarges the feature maps while densely reusing previous feature maps by aggregating them into a new feature map. As the input feature map of each dense block has a direct connection to the output of the block, the inputs of previous blocks in the encoder module also connect to the new feature map directly. The new feature map is then upsampled to compute loss with the groundtruth, which leads to multiple losses computation. Thus, the inputs of all dense blocks in the FDNet have a direct connection to the loss layers. This will significantly boost the gradient backpropagation. Following the DenseNet structure, we also use dense block at each stage of the same size after a compression layer with convolution operation, which is to change the number of feature maps from adaptive aggregation structure. The compression layer is composed of BN, ReLU and 1 1 convolution operation. In the two compression layers after adaptive aggregation, their filter numbers are set to 1024 and 768. In the two compression layers after block 5 and block 6, the filter numbers are set to 768 and 512. For block 5 and block 6, there are 2 convolutional layers in each of them.
4 H/8 W/8 Down 2 Up 2 Up 4 Up 2 Figure 4: An example of an adaptive aggregation structure for dense feature maps. For all the input feature maps (not including direct connected input feature map, i.e. blue line), a compression layer with BN, ReLU and 1 1 convolution is applied to adjust the number of feature maps. Then an upsampling or downsampling layer is first operated so that all the feature maps are consistent in size with the output feature map. They are then concatenated to form a new feature map with 1 8 of the size of the input image. Adaptive aggregation of dense feature maps In previous works, e.g. U-Net (Ronneberger, Fischer, and Brox 2015) for semantic segmentation, FPN (Lin et al. 2017b) for object detection and SharpMask (Pinheiro et al. 2016) for instance segmentation, feature maps are reused directly in the corresponding decoder module by concatenating the feature maps or adding them. Furthermore, RefineNet (Lin et al. 2017a), LRR (Ghiasi and Fowlkes 2016) and G-FRNet (Islam et al. 2017) refine the feature maps progressively stage by stage. Instead of just using previous feature maps as before, we introduce an adaptive aggregation structure to make better use of feature maps from previous blocks. As shown in Fig. 4, the feature maps from previous blocks are densely concatenated together by using the adaptive aggregation structure. The adaptive aggregation structure takes all the feature maps from previous blocks (B 1, B 2,...) as input. The feature maps from the lower layers (e.g. B 1, B 2 ) are of high resolution with coarse semantic information, whereas feature maps from the higher layers (e.g. B 3, B 4 ) are of low resolution with rich semantic information. The adaptive aggregation structure combines all previous feature maps to generate rich contextual information and also spatial information. For incoming feature maps, the scale sizes may be different. As shown in Fig. 4, the output feature map is 1 8 of the size of the input image. To reduce memory consumption, we firstly use the convolutional layer to compress the incoming feature maps except for the direct connected feature map (which has been compressed). The compression layer is also composed of BN, ReLU and a 1 1 convolution operation. In order to make all feature maps consistent in size, we use the convolutional layer to downsample and the deconvolutional layer to upsample the feature maps. Intuitively, we directly concatenate the feature map if it is equivalent to the size of the output feature map. The convolutional layers are all composed of BN, ReLU and a 3 3 convolution operation with different strides. The deconvolutional layers are all composed of BN, ReLU and a 4 4 deconvolutional operation with different strides. At last, all the resultant feature maps D1, i D2, i..., DM i (M input feature maps) are concatenated into a new feature map F i for the i th stage, which is then fed to latter loss computation operation or dense block. The formulation for obtaining the i th dense feature map from the previous feature maps can be written as follows: D i 1 = T i 1(B 1 ), D i 2 = T i 2(B 2 ),..., D i M = T i M (B M ) F i = [D i 1, D i 2,..., D i M ] (2) where T ( ) denotes the transformation operation (downsample or upsample). If B j is of the same size as the output feature map, no operation is performaned on B j. In addition, [ ] stands for the concatenation operation. In the adaptive aggregation structures for the three stages of the decoder module, the filter numbers in the compression layer for the reused feature map are set to 384, 256 and 128 respectively. The upsampling and downsampling layers will not change the dimension of feature maps. Boundary-aware loss In previous works, cross entropy loss function is often used in pipeline, which treat all pixels equally. As shown in Fig. 2, we can see that the pixels surrounding the boundary are hard examples, which lead to bad prediction. Based on this observation, we construct a boundary-aware loss function, which guides the network to pay more attention on the pixels near the boundary. The loss function is loss(l, L gt ) = 1 N K C j=1 I i S j c=1 α j L gt i,c w(l i,c)logl i,c where L is the result of softmax operation on the output feature map and L gt is the groundtruth. The I i is the i-th pixel in the image I and C is number of categories. We split all the N pixels of image I into several sets S j based on the distance between the pixels and the boundary so that I = {S 1, S 2,..., S K }. We apply image dilation operation on the boundary with varying kernel size, which refers to as band width shown in Fig. 2, to obtain different set of pixels surrounding the boundary. α j is the balancing weight and w(l i,c ) is an attention weight function. Motivated by (Lin et al. 2017c), we test two attention weight functions (poly and exp): w(l i,c ) = (1 L i,c ) λ and w(l i,c ) = e λ(1 Li,c). The λ is used to control attention weight. The ablation experiment results are shown in Table 2. In order to further boost the gradient backpropagation and information flow, we compute multiple losses for different aggregated feature map F i motivated by (Zhao et al. 2017; Islam et al. 2017; Fu et al. 2017). Specifically, F i is fed to upsample module to obtain a feature map L i with channel C, where C is number of classes in prediction labels. Then the feature map L i is upsampled by using bilinear interpolation method directly to produce feature map H W C, which is used to compute pixel-wise loss with groundtruth. In terms of formula, the final loss L final is computed as fol- (3)

, especially on the boundary localization, compared with the results (Column 3) of encoder-decoder structure with feature reuse method (Fig.")
) L final = i loss(l i, L gt ) (4) where U i ( ) denotes a upsample module with bilinear interpolation operation.")


. Random crops of 512 512 and horizontal flip is applied. We train the dataset with 30K iterations.")

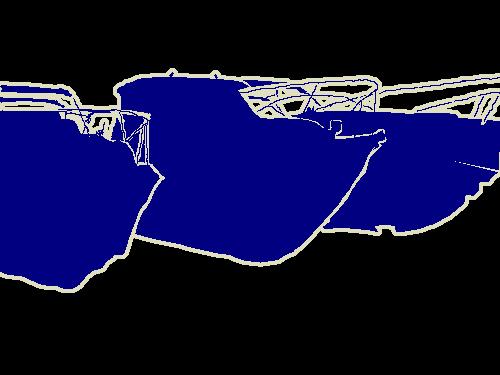
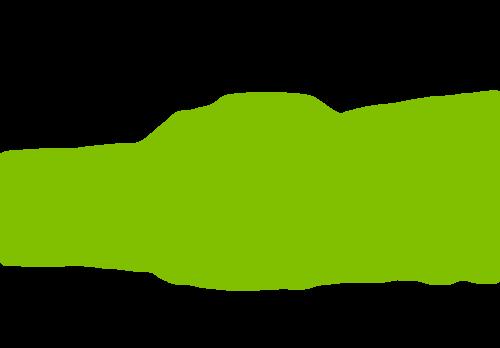
5 Table 1: The mean IoU scores (%) for encoder-decoder with different feature map reuse methods on PASCAL VOC 2012 validation dataset. Encoder stride w/o feature w/ feature dense feature reuse reuse reuse Image w/o Feature reuse w/ Feature reuse FDNet Groundtruth Figure 5: The effect of employing the proposed fully dense feature map reuse structure compared with other frameworks. Our proposed FDNet shows better results (Column 4), especially on the boundary localization, compared with the results (Column 3) of encoder-decoder structure with feature reuse method (Fig. 1 Middle) and the results (Column 2) of encoder-decoder structure without feature reuse method (Fig. 1 Top). lows: L i = softmax(u i (F i )) L final = i loss(l i, L gt ) (4) where U i ( ) denotes a upsample module with bilinear interpolation operation. In the encoder module, the output feature map of each module is the concatenation of all the feature maps within this block, including the input. And the aggregated feature map is feature maps from all the previous blocks. Thus, each feature map in the encoder has much shorter path to loss compared with previous encoder-decoder structure (Lin et al. 2017a; Islam et al. 2017). The gradient backpropagation and information flowing is much more efficient. This will further boost our network optimization. Implementation details Training: The proposed FDNet is implemented with Py- Torch on a single NVIDIA GTX 1080Ti. The weights of DenseNet-264 are directly employed in the encoder module of FDNet. In the training step, we adopt data augmentation similar to (Chen et al. 2016a). Random crops of and horizontal flip is applied. We train the dataset with 30K iterations. We optimize the network by using the poly learning rate policy where the initial learning rate is multiplied by (1 iter max iter )power with power = 0.9. The initial learning rate is set to We set momentum to 0.9 and weight decay to Inference: In the inference step, we pad images with mean Table 2: The mean IoU scores (%) for boundary-aware loss on PASCAL VOC 2012 validation dataset. The poly and exp represent different weighting methods. loss miou CE 79.4 b-aware(poly) kernel = (10, 20, 30, 40), λ = 0 α = (5, 4, 3, 2, 1) 79.5 α = (8, 6, 4, 2, 1) 80.3 b-aware(poly) α = (8, 6, 4, 2, 1), λ = 0 kernel = (5, 10, 15, 20) 79.6 b-aware(poly) α = (8, 6, 4, 2, 1), kernel = (10, 20, 30, 40) λ = λ = λ = b-aware(exp) α = (8, 6, 4, 2, 1), kernel = (10, 20, 30, 40) λ = λ = λ = λ = λ = value before feeding full images into the network. We apply multi-scale inference, which is commonly used in semantic segmentation methods (Lin et al. 2017a; Fu et al. 2017). For multi-scale inference, we average the predictions on the same image across different scales for the final prediction. We set the scales ranging from 0.6 to 1.4. Horizontal flipping is also adopted in the inference. In the ablation experiments, we just use the single scale (i.e. scale = 1.0) and horizontal flipping method to do inference. In addition, we use the laststage feature map of the decoder module to generate final prediction label map. Experiments In this section, we describe configurations of experimental datasets and show ablation experiments on PASCAL VOC At last, we report the results on two benchmark datasets: PASCAL VOC 2012 and NYUDv2. Datasets description To show the effectiveness of our approach, we conduct comprehensive experiments on PASCAL VOC 2012 dataset (Everingham et al. 2010) and NYUDv2 dataset (Silberman et al. 2012).
 4253 2907 - Parameters (M) 109.")

 of")




, resulting in 10,582 images as trainaug dataset for training.")
 consists of 1449 RGB-D images showing indoor scenes.")





 and the other is encoder-decoder structure with naive feature map reuse (Fig.")



 without feature map")





6 Table 3: GPU memory, number of parameters and some results on VOC 2012 test dataset are reported. Methods RefineNet-152 FDNet SDN M2 GPU Memory (MB) Parameters (M) miou Table 4: Comparison of different mothods on PASCAL VOC 2012 validation dataset with mean IoU score (%). FDNet- 16s-MS denotes the evaluation on multiple scales. FDNet- 16s-finetuning-MS denotes fine-tuning on standard training data (1464 images) of PASCAL VOC 2012 dataset after training on the trainaug dataset. Method miou Deeplab-MSc-CRF-LargeFOV 68.7 DeconvNet 67.1 DeepLabv G-FRNet 77.8 DeepLabv SDN 80.7 DeepLabv FDNet-16s 80.9 FDNet-16s-MS 82.1 FDNet-16s-finetuning-MS 84.1 PASCAL VOC 2012: The dataset has 1,464 images for training, 1,449 images for validation and 1,456 images for testing, which involves 20 foreground object classes and one background class. Meanwhile, we augment the training set with extra labeled PASCAL VOC images provided by Semantic Boundaries Dataset (Hariharan et al. 2011), resulting in 10,582 images as trainaug dataset for training. NYUDv2: The NYUDv2 dataset (Silberman et al. 2012) consists of 1449 RGB-D images showing indoor scenes. We use the segmentation labels provided in (Gupta, Arbelaez, and Malik 2013), in which all labels are mapped to 40 classes. We use the standard training/test split with 795 and 654 images, respectively. Only RGB images are used in our experiments. Moreover, we perform a series of ablation evaluations on PASCAL VOC 2012 dataset with mean IoU score reported. We use the trainaug and validation dataset of PASCAL VOC 2012 for training and inference, respectively. Feature map reuse To verify the power of dense feature maps reuse, we compare our method with other two baseline frameworks. In this experiment, cross entropy loss is used. One is encoderdecoder structure without feature map reuse (Fig. 1 Top) and the other is encoder-decoder structure with naive feature map reuse (Fig. 1 Middle). We also compare the three frameworks on different encoder strides (the ratio of input image resolution to smallest output feature map of encoder, i.e. 16 and 32). The results are shown in Table 1. It is observed that Figure 6: Some visual results on PASACAL VOC 2012 dataset. Three columns of each group are image, groundtruth and prediction label map. the performance increases when feature maps are reused. Specifically, the performance for encoder-decoder (encoder stride = 32) without feature map reuse is only 77.2%. After the naive feature map reuse, the performance can increase to 78.5%. Furthermore, our fully dense feature map reuse can further improve the performance to 78.9%. In addition, when we adopt the stride 16 for the encoder module, the performance is much better than the original encoder with stride 32 on the three frameworks. This is because the spatial information loss is reduced by the encoder with smaller stride. We speculate that encoder with stride 8 can have better result similar to (Chen et al. 2017; 2018). Because of memory limitation, we only test on the encoder with stride 16 and 32. We also show some predicted semantic label maps for different feature map reuse methods in Fig. 5. For the encoderdecoder structure without feature map reuse, the result is poor, especially for boundary localization. Though the naive feature map reuse method improves the segmentation result partially, it is still hard to obtain accurate pixel-wise prediction. The fully dense feature map reuse method shows very excellent results on the boundary localization. Boundary-aware loss In order to demonstrate the effect of proposed boundaryaware loss method, we take FDNet-16s as baseline to test the performance of different parameters. We mainly use the kernel = (10, 20, 30, 40) and kernel = (5, 10, 15, 20) by splitting the pixels into K = 5 sets (the remaining pixels are referred to as S 5 ). For poly weight method, the boundaryaware loss method (b-aware) degrades into cross entropy method (CE) when α = (1, 1, 1, 1, 1) and λ = 0. As shown in Table 2, the simply weighting on the pixels surrounding the boundary shows better performance compared with general cross entropy method, which enhances the performance by 0.9%. By fixing the α and kernel, we try different parameter λ in Table 2. Comparing the poly and exp methods, we can observe that exp brings obvious improvement by 1.5%. On the contrary, the poly methods lead to worse effect compared with baseline method (80.0 vs 80.3). In addition, the network cannot converge for λ < 1. We also compare the labeling accuracy for the pixels near the boundary. As shown in Fig. 2, the FDNet with boundary-aware loss shows obvious better performance for the pixels surrounding the boundary.
7 Table 5: Quantitative results (%) in terms of mean IoU on PASCAL VOC 2012 test set. Only VOC data is used as training data and densecrf (Krähenbühl and Koltun 2011) is not included. aero bicycle bird boat bottle bus car Method miou DeconvNet (Noh, Hong, and Han 2015) Attention (Chen et al. 2016b) Deeplabv2 (Chen et al. 2016a) GCRF (Vemulapalli et al. 2016) Adelaide (Lin et al. 2016) LRR (Ghiasi and Fowlkes 2016) G-FRNet (Islam et al. 2017) PSPNet (Zhao et al. 2017) SDN (Fu et al. 2017) FDNet cat chair cow table dog horse mbike person plant sheep sofa train tv Memory analysis For semantic segmentation task, memory consumption and parameter number are both important issues. The proposed FDNet uses fully dense connected structure with nearly the same number of parameters compared with RefineNet (Lin et al. 2017a). As shown in Table 3, the FDNet consumes much less GPU memory (training process) compared with RefineNet. In addition, the memory consumption of FDNet can be reduced by using sharing memory efficiently based on (Geoff Pleiss* 2017). Compared with SDN (Fu et al. 2017), there are much less parameters for FDNet but the performance is much better. PASCAL VOC 2012 We evaluate the performance on PASCAL VOC 2012 dataset following previous works (Lin et al. 2017a; Zhao et al. 2017). As FDNet-16s shows better performance (Table 1), we only report the performance of FDNet-16s in following experiments. We adopt boundary-aware method in the training step. As shown in Table 4, FDNet-16s achieves very comparable result with 82.1% mean IoU accuracy compared with previous works ((Chen et al. 2017; Islam et al. 2017; Fu et al. 2017)) when evaluated on multiple scales. Moreover, after fine-tuning the model on the standard training data (1464 images) of PASCAL VOC 2012 dataset, we achieve much better result with 84.1% mean IoU accuracy, which is the best result currently if not considering pretraining on other dataset (such as MS-COCO (Lin et al. 2014)). Some visual results with image, groundtruth and prediction label map are shown in Fig. 6. Table 5 shows quantitative results of our method on the test dataset, where we only report the results using PAS- CAL VOC dataset. We achieve the best result with 84.2% on test data without pretraining on other datasets, which is the highest score when considering training on PASCAL VOC 2012 dataset. Though latest work DeepLabv3+ (Chen et al. 2018) achieve mean IoU score of 89.0% on test data of PAS- CAL VOC 2012, the result is relying on pretraining on much larger dataset MS-COCO (Lin et al. 2014) or JFT (Chollet 2017). In fact, FDNet-16s shows very comparable result compared with DeepLabv3+ on validation dataset (Table 4). NYUDv2 Dataset We conduct experiments on NYUDv2 dataset to compare FDNet-16s with previous works. We follow the training Table 6: Quantitative results (%) on NYUDv2 dataset (40 classes). The model is only trained on the provided training image dataset. Method pixel acc. mean acc. miou FCN-32s SegNet Bayesian SegNet FCN-HHA Piecewise RefineNet FDNet-16s setup in PASCAL VOC Multi-scale inference is also adopted. The results are reported on Table 6. Similar to (Lin et al. 2017a), pixel accuracy, mean accuracy and mean IoU are used to evaluate all the methods. Some works make use of both depth image and RGB image as input and obtain very better result. For example, RDF (Park, Hong, and Lee 2017) achieves 50.1% (mean IoU) by using depth information. For a fair comparison, we only report the results training on only RGB images. As is shown, FDNet-16s outperforms previous work in terms of all metrics. In particular, our result is better than RefineNet (Lin et al. 2017a) by 0.9% in terms of mean IoU accuracy. Conclusion In this paper, we have presented the fully dense neural network (FDNet) with encoder-decoder structure for semantic segmentation. For each layer of the FDNet in the decoder module, feature maps of almost all the previous layers are aggregated as the input. Furthermore, we propose boundaryaware loss function by paying more attention to the pixels surrounding the boundary. The proposed FDNet is very advantageous to semantic segmentation. On the one hand, the class boundaries as the spatial information are well reconstructed by using Encoder-Decoder structure with boundaryaware loss function. On the other hand, the FDNet learns more efficiently with the more efficient gradient backpropagation, much similar to the arguments already demonstrated in ResNet and DenseNet. The experiments show that our model outperforms previous works on two public benchmarks when any training on other datasets is not considered.
8 References Chen, L.-C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; and Yuille, A. L. 2016a. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. TPAMI. Chen, L.-C.; Yang, Y.; Wang, J.; Xu, W.; and Yuille, A. L. 2016b. Attention to scale: Scale-aware semantic image segmentation. In CVPR. Chen, L.-C.; Papandreou, G.; Schroff, F.; and Adam, H Rethinking atrous convolution for semantic image segmentation. arxiv preprint arxiv: Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; and Adam, H Encoder-decoder with atrous separable convolution for semantic image segmentation. arxiv preprint arxiv: Chollet, F Xception: Deep learning with depthwise separable convolutions. CVPR. Everingham, M.; Van Gool, L.; Williams, C. K.; Winn, J.; and Zisserman, A The pascal visual object classes (voc) challenge. IJCV. Fu, J.; Liu, J.; Wang, Y.; and Lu, H Stacked deconvolutional network for semantic segmentation. arxiv preprint arxiv: Geoff Pleiss*, Danlu Chen*, G. H. T. L. L. v. d. M. K. Q. W Memory-efficient implementation of densenets. In Technical report. Ghiasi, G., and Fowlkes, C. C Laplacian pyramid reconstruction and refinement for semantic segmentation. In ECCV. Gupta, S.; Arbelaez, P.; and Malik, J Perceptual organization and recognition of indoor scenes from rgb-d images. In CVPR. Hariharan, B.; Arbeláez, P.; Bourdev, L.; Maji, S.; and Malik, J Semantic contours from inverse detectors. In ICCV. He, K.; Zhang, X.; Ren, S.; and Sun, J Deep residual learning for image recognition. In CVPR. He, K.; Gkioxari, G.; Dollár, P.; and Girshick, R Mask r-cnn. In ICCV. Huang, G.; Liu, Z.; v. Maaten, L.; and Weinberger, K. Q Densely connected convolutional networks. In CVPR. Huang, G.; Chen, D.; Li, T.; Wu, F.; van der Maaten, L.; and Weinberger, K. Q Multi-scale dense convolutional networks for efficient prediction. ICLR. Ioffe, S., and Szegedy, C Batch normalization: Accelerating deep network training by reducing internal covariate shift. In ICML. Islam, M. A.; Rochan, M.; Bruce, N. D.; and Wang, Y Gated feedback refinement network for dense image labeling. In CVPR. Krähenbühl, P., and Koltun, V Efficient inference in fully connected crfs with gaussian edge potentials. In NIPS. Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; and Zitnick, C. L Microsoft coco: Common objects in context. In ECCV. Lin, G.; Shen, C.; Van Den Hengel, A.; and Reid, I Efficient piecewise training of deep structured models for semantic segmentation. In CVPR. Lin, G.; Milan, A.; Shen, C.; and Reid, I. 2017a. Refinenet: Multi-path refinement networks with identity mappings for high-resolution semantic segmentation. CVPR. Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; and Belongie, S. 2017b. Feature pyramid networks for object detection. In CVPR. Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; and Dollár, P. 2017c. Focal loss for dense object detection. ICCV. Liu, W.; Rabinovich, A.; and Berg, A. C Parsenet: Looking wider to see better. ICLR. Long, J.; Shelhamer, E.; and Darrell, T Fully convolutional networks for semantic segmentation. In CVPR. Noh, H.; Hong, S.; and Han, B Learning deconvolution network for semantic segmentation. In ICCV. Park, S.-J.; Hong, K.-S.; and Lee, S Rdfnet: Rgb-d multi-level residual feature fusion for indoor semantic segmentation. In ICCV. Pinheiro, P. O.; Lin, T.-Y.; Collobert, R.; and Dollár, P Learning to refine object segments. In ECCV. Ronneberger, O.; Fischer, P.; and Brox, T U-net: al networks for biomedical image segmentation. In MICCI. Shen, Z.; Liu, Z.; Li, J.; Jiang, Y.-G.; Chen, Y.; and Xue, X Dsod: Learning deeply supervised object detectors from scratch. In ICCV. Silberman, N.; Hoiem, D.; Kohli, P.; and Fergus, R Indoor segmentation and support inference from rgbd images. In ECCV. Simonyan, K., and Zisserman, A Very deep convolutional networks for large-scale image recognition. ICLR. Vemulapalli, R.; Tuzel, O.; Liu, M.-Y.; and Chellapa, R Gaussian conditional random field network for semantic segmentation. In CVPR. Vijay, B.; Alex, K.; and Roberto, C Segnet: A deep convolutional encoder-decoder architecture for image segmentation. TPAMI. Zhao, H.; Shi, J.; Qi, X.; Wang, X.; and Jia, J Pyramid scene parsing network. In CVPR.
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION
 HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
RefineNet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation
 : Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1,2, Anton Milan 1, Chunhua Shen 1,2, Ian Reid 1,2 1 The University of Adelaide, 2 Australian Centre for Robotic
: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1,2, Anton Milan 1, Chunhua Shen 1,2, Ian Reid 1,2 1 The University of Adelaide, 2 Australian Centre for Robotic
arxiv: v1 [cs.cv] 11 Apr 2018
![arxiv: v1 [cs.cv] 11 Apr 2018](/thumbs/89/99253021.jpg "arxiv: v1 [cs.cv] 11 Apr 2018") arxiv:1804.03821v1 [cs.cv] 11 Apr 2018 ExFuse: Enhancing Feature Fusion for Semantic Segmentation Zhenli Zhang 1, Xiangyu Zhang 2, Chao Peng 2, Dazhi Cheng 3, Jian Sun 2 1 Fudan University, 2 Megvii Inc.
arxiv:1804.03821v1 [cs.cv] 11 Apr 2018 ExFuse: Enhancing Feature Fusion for Semantic Segmentation Zhenli Zhang 1, Xiangyu Zhang 2, Chao Peng 2, Dazhi Cheng 3, Jian Sun 2 1 Fudan University, 2 Megvii Inc.
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
RefineNet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation
 : Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1 Anton Milan 2 Chunhua Shen 2,3 Ian Reid 2,3 1 Nanyang Technological University 2 University of Adelaide 3 Australian
: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1 Anton Milan 2 Chunhua Shen 2,3 Ian Reid 2,3 1 Nanyang Technological University 2 University of Adelaide 3 Australian
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network
 Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Supplementary Material: Pixelwise Instance Segmentation with a Dynamically Instantiated Network Anurag Arnab and Philip H.S. Torr University of Oxford {anurag.arnab, philip.torr}@eng.ox.ac.uk 1. Introduction
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
arxiv: v2 [cs.cv] 18 Jul 2017
![arxiv: v2 [cs.cv] 18 Jul 2017](/thumbs/72/67294650.jpg "arxiv: v2 [cs.cv] 18 Jul 2017") PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
arxiv: v1 [cs.cv] 8 Mar 2017 Abstract
![arxiv: v1 [cs.cv] 8 Mar 2017 Abstract](/thumbs/74/70449616.jpg "arxiv: v1 [cs.cv] 8 Mar 2017 Abstract") Large Kernel Matters Improve Semantic Segmentation by Global Convolutional Network Chao Peng Xiangyu Zhang Gang Yu Guiming Luo Jian Sun School of Software, Tsinghua University, {pengc14@mails.tsinghua.edu.cn,
Large Kernel Matters Improve Semantic Segmentation by Global Convolutional Network Chao Peng Xiangyu Zhang Gang Yu Guiming Luo Jian Sun School of Software, Tsinghua University, {pengc14@mails.tsinghua.edu.cn,
arxiv: v1 [cs.cv] 9 Aug 2017
![arxiv: v1 [cs.cv] 9 Aug 2017](/thumbs/78/78708739.jpg "arxiv: v1 [cs.cv] 9 Aug 2017") BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
BlitzNet: A Real-Time Deep Network for Scene Understanding Nikita Dvornik Konstantin Shmelkov Julien Mairal Cordelia Schmid Inria arxiv:1708.02813v1 [cs.cv] 9 Aug 2017 Abstract Real-time scene understanding
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
arxiv: v1 [cs.cv] 24 May 2016
![arxiv: v1 [cs.cv] 24 May 2016](/thumbs/80/80473828.jpg "arxiv: v1 [cs.cv] 24 May 2016") Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Laplacian Pyramid Reconstruction and Refinement for Semantic Segmentation
 Laplacian Pyramid Reconstruction and Refinement for Semantic Segmentation Golnaz Ghiasi (B) and Charless C. Fowlkes Department of Computer Science, University of California, Irvine, USA {gghiasi,fowlkes}@ics.uci.edu
Laplacian Pyramid Reconstruction and Refinement for Semantic Segmentation Golnaz Ghiasi (B) and Charless C. Fowlkes Department of Computer Science, University of California, Irvine, USA {gghiasi,fowlkes}@ics.uci.edu
Learning Deep Structured Models for Semantic Segmentation. Guosheng Lin
 Learning Deep Structured Models for Semantic Segmentation Guosheng Lin Semantic Segmentation Outline Exploring Context with Deep Structured Models Guosheng Lin, Chunhua Shen, Ian Reid, Anton van dan Hengel;
Learning Deep Structured Models for Semantic Segmentation Guosheng Lin Semantic Segmentation Outline Exploring Context with Deep Structured Models Guosheng Lin, Chunhua Shen, Ian Reid, Anton van dan Hengel;
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Pixel Offset Regression (POR) for Single-shot Instance Segmentation
 for Single-shot Instance Segmentation") Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Pixel Offset Regression (POR) for Single-shot Instance Segmentation Yuezun Li 1, Xiao Bian 2, Ming-ching Chang 1, Longyin Wen 2 and Siwei Lyu 1 1 University at Albany, State University of New York, NY,
Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation
 Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation Md Atiqur Rahman and Yang Wang Department of Computer Science, University of Manitoba, Canada {atique, ywang}@cs.umanitoba.ca
Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation Md Atiqur Rahman and Yang Wang Department of Computer Science, University of Manitoba, Canada {atique, ywang}@cs.umanitoba.ca
arxiv: v2 [cs.cv] 8 Apr 2018
![arxiv: v2 [cs.cv] 8 Apr 2018](/thumbs/86/94330536.jpg "arxiv: v2 [cs.cv] 8 Apr 2018") Single-Shot Object Detection with Enriched Semantics Zhishuai Zhang 1 Siyuan Qiao 1 Cihang Xie 1 Wei Shen 1,2 Bo Wang 3 Alan L. Yuille 1 Johns Hopkins University 1 Shanghai University 2 Hikvision Research
Single-Shot Object Detection with Enriched Semantics Zhishuai Zhang 1 Siyuan Qiao 1 Cihang Xie 1 Wei Shen 1,2 Bo Wang 3 Alan L. Yuille 1 Johns Hopkins University 1 Shanghai University 2 Hikvision Research
Places Challenge 2017
 Places Challenge 2017 Scene Parsing Task CASIA_IVA_JD Jun Fu, Jing Liu, Longteng Guo, Haijie Tian, Fei Liu, Hanqing Lu Yong Li, Yongjun Bao, Weipeng Yan National Laboratory of Pattern Recognition, Institute
Places Challenge 2017 Scene Parsing Task CASIA_IVA_JD Jun Fu, Jing Liu, Longteng Guo, Haijie Tian, Fei Liu, Hanqing Lu Yong Li, Yongjun Bao, Weipeng Yan National Laboratory of Pattern Recognition, Institute
Object Detection Based on Deep Learning
 Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object Detection Based on Deep Learning Yurii Pashchenko AI Ukraine 2016, Kharkiv, 2016 Image classification (mostly what you ve seen) http://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Presentation Outline. Semantic Segmentation. Overview. Presentation Outline CNN. Learning Deconvolution Network for Semantic Segmentation 6/6/16
 6/6/16 Learning Deconvolution Network for Semantic Segmentation Hyeonwoo Noh, Seunghoon Hong,Bohyung Han Department of Computer Science and Engineering, POSTECH, Korea Shai Rozenberg 6/6/2016 1 2 Semantic
6/6/16 Learning Deconvolution Network for Semantic Segmentation Hyeonwoo Noh, Seunghoon Hong,Bohyung Han Department of Computer Science and Engineering, POSTECH, Korea Shai Rozenberg 6/6/2016 1 2 Semantic
HENet: A Highly Efficient Convolutional Neural. Networks Optimized for Accuracy, Speed and Storage
 HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
arxiv: v2 [cs.cv] 19 Nov 2018
![arxiv: v2 [cs.cv] 19 Nov 2018](/thumbs/90/103457332.jpg "arxiv: v2 [cs.cv] 19 Nov 2018") OCNet: Object Context Network for Scene Parsing Yuhui Yuan Jingdong Wang Microsoft Research {yuyua,jingdw}@microsoft.com arxiv:1809.00916v2 [cs.cv] 19 Nov 2018 Abstract In this paper, we address the problem
OCNet: Object Context Network for Scene Parsing Yuhui Yuan Jingdong Wang Microsoft Research {yuyua,jingdw}@microsoft.com arxiv:1809.00916v2 [cs.cv] 19 Nov 2018 Abstract In this paper, we address the problem
arxiv: v4 [cs.cv] 6 Jul 2016
![arxiv: v4 [cs.cv] 6 Jul 2016](/thumbs/93/112985717.jpg "arxiv: v4 [cs.cv] 6 Jul 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
RSRN: Rich Side-output Residual Network for Medial Axis Detection
 RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
RSRN: Rich Side-output Residual Network for Medial Axis Detection Chang Liu, Wei Ke, Jianbin Jiao, and Qixiang Ye University of Chinese Academy of Sciences, Beijing, China {liuchang615, kewei11}@mails.ucas.ac.cn,
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Gradient of the lower bound
 Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Weakly Supervised with Latent PhD advisor: Dr. Ambedkar Dukkipati Department of Computer Science and Automation gaurav.pandey@csa.iisc.ernet.in Objective Given a training set that comprises image and image-level
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Supplementary Material
 Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Supplementary Material Xintao Wang 1 Ke Yu 1 Chao Dong 2 Chen Change Loy 1 1 CUHK - SenseTime Joint Lab, The Chinese
Recovering Realistic Texture in Image Super-resolution by Deep Spatial Feature Transform Supplementary Material Xintao Wang 1 Ke Yu 1 Chao Dong 2 Chen Change Loy 1 1 CUHK - SenseTime Joint Lab, The Chinese
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors
![[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors](/thumbs/89/97941029.jpg "[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors") [Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
[Supplementary Material] Improving Occlusion and Hard Negative Handling for Single-Stage Pedestrian Detectors Junhyug Noh Soochan Lee Beomsu Kim Gunhee Kim Department of Computer Science and Engineering
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
arxiv: v1 [cs.cv] 2 Aug 2018
![arxiv: v1 [cs.cv] 2 Aug 2018](/thumbs/93/114042775.jpg "arxiv: v1 [cs.cv] 2 Aug 2018") arxiv:1808.00897v1 [cs.cv] 2 Aug 2018 BiSeNet: Bilateral Segmentation Network for Real-time Semantic Segmentation Changqian Yu 1[0000 0002 4488 4157], Jingbo Wang 2[0000 0001 9700 6262], Chao Peng 3[0000
arxiv:1808.00897v1 [cs.cv] 2 Aug 2018 BiSeNet: Bilateral Segmentation Network for Real-time Semantic Segmentation Changqian Yu 1[0000 0002 4488 4157], Jingbo Wang 2[0000 0001 9700 6262], Chao Peng 3[0000
arxiv: v3 [cs.cv] 17 May 2018
![arxiv: v3 [cs.cv] 17 May 2018](/thumbs/79/79331767.jpg "arxiv: v3 [cs.cv] 17 May 2018") FSSD: Feature Fusion Single Shot Multibox Detector Zuo-Xin Li Fu-Qiang Zhou Key Laboratory of Precision Opto-mechatronics Technology, Ministry of Education, Beihang University, Beijing 100191, China {lizuoxin,
FSSD: Feature Fusion Single Shot Multibox Detector Zuo-Xin Li Fu-Qiang Zhou Key Laboratory of Precision Opto-mechatronics Technology, Ministry of Education, Beihang University, Beijing 100191, China {lizuoxin,
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
RGBd Image Semantic Labelling for Urban Driving Scenes via a DCNN
 RGBd Image Semantic Labelling for Urban Driving Scenes via a DCNN Jason Bolito, Research School of Computer Science, ANU Supervisors: Yiran Zhong & Hongdong Li 2 Outline 1. Motivation and Background 2.
RGBd Image Semantic Labelling for Urban Driving Scenes via a DCNN Jason Bolito, Research School of Computer Science, ANU Supervisors: Yiran Zhong & Hongdong Li 2 Outline 1. Motivation and Background 2.
Dataset Augmentation with Synthetic Images Improves Semantic Segmentation
 Dataset Augmentation with Synthetic Images Improves Semantic Segmentation P. S. Rajpura IIT Gandhinagar param.rajpura@iitgn.ac.in M. Goyal IIT Varanasi manik.goyal.cse15@iitbhu.ac.in H. Bojinov Innit Inc.
Dataset Augmentation with Synthetic Images Improves Semantic Segmentation P. S. Rajpura IIT Gandhinagar param.rajpura@iitgn.ac.in M. Goyal IIT Varanasi manik.goyal.cse15@iitbhu.ac.in H. Bojinov Innit Inc.
ScratchDet: Exploring to Train Single-Shot Object Detectors from Scratch
 ScratchDet: Exploring to Train Single-Shot Object Detectors from Scratch Rui Zhu 1,4, Shifeng Zhang 3, Xiaobo Wang 1, Longyin Wen 2, Hailin Shi 1, Liefeng Bo 2, Tao Mei 1 1 JD AI Research, China. 2 JD
ScratchDet: Exploring to Train Single-Shot Object Detectors from Scratch Rui Zhu 1,4, Shifeng Zhang 3, Xiaobo Wang 1, Longyin Wen 2, Hailin Shi 1, Liefeng Bo 2, Tao Mei 1 1 JD AI Research, China. 2 JD
arxiv: v2 [cs.cv] 10 Apr 2017
![arxiv: v2 [cs.cv] 10 Apr 2017](/thumbs/80/82485703.jpg "arxiv: v2 [cs.cv] 10 Apr 2017") Fully Convolutional Instance-aware Semantic Segmentation Yi Li 1,2 Haozhi Qi 2 Jifeng Dai 2 Xiangyang Ji 1 Yichen Wei 2 1 Tsinghua University 2 Microsoft Research Asia {liyi14,xyji}@tsinghua.edu.cn, {v-haoq,jifdai,yichenw}@microsoft.com
Fully Convolutional Instance-aware Semantic Segmentation Yi Li 1,2 Haozhi Qi 2 Jifeng Dai 2 Xiangyang Ji 1 Yichen Wei 2 1 Tsinghua University 2 Microsoft Research Asia {liyi14,xyji}@tsinghua.edu.cn, {v-haoq,jifdai,yichenw}@microsoft.com
Mask R-CNN. Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018
 Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
arxiv: v1 [cs.cv] 4 Dec 2016
![arxiv: v1 [cs.cv] 4 Dec 2016](/thumbs/89/97692264.jpg "arxiv: v1 [cs.cv] 4 Dec 2016") Pyramid Scene Parsing Network Hengshuang Zhao 1 Jianping Shi 2 Xiaojuan Qi 1 Xiaogang Wang 1 Jiaya Jia 1 1 The Chinese University of Hong Kong 2 SenseTime Group Limited {hszhao, xjqi, leojia}@cse.cuhk.edu.hk,
Pyramid Scene Parsing Network Hengshuang Zhao 1 Jianping Shi 2 Xiaojuan Qi 1 Xiaogang Wang 1 Jiaya Jia 1 1 The Chinese University of Hong Kong 2 SenseTime Group Limited {hszhao, xjqi, leojia}@cse.cuhk.edu.hk,
Ladder-style DenseNets for Semantic Segmentation of Large Natural Images
 Ladder-style DenseNets for Semantic Segmentation of Large Natural Images Ivan Krešo Siniša Šegvić Faculty of Electrical Engineering and Computing University of Zagreb, Croatia name.surname@fer.hr Josip
Ladder-style DenseNets for Semantic Segmentation of Large Natural Images Ivan Krešo Siniša Šegvić Faculty of Electrical Engineering and Computing University of Zagreb, Croatia name.surname@fer.hr Josip
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
 Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun Presented by Tushar Bansal Objective 1. Get bounding box for all objects
SSD: Single Shot MultiBox Detector. Author: Wei Liu et al. Presenter: Siyu Jiang
 SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
SSD: Single Shot MultiBox Detector Author: Wei Liu et al. Presenter: Siyu Jiang Outline 1. Motivations 2. Contributions 3. Methodology 4. Experiments 5. Conclusions 6. Extensions Motivation Motivation
Person Part Segmentation based on Weak Supervision
 JIANG, CHI: PERSON PART SEGMENTATION BASED ON WEAK SUPERVISION 1 Person Part Segmentation based on Weak Supervision Yalong Jiang 1 yalong.jiang@connect.polyu.hk Zheru Chi 1 chi.zheru@polyu.edu.hk 1 Department
JIANG, CHI: PERSON PART SEGMENTATION BASED ON WEAK SUPERVISION 1 Person Part Segmentation based on Weak Supervision Yalong Jiang 1 yalong.jiang@connect.polyu.hk Zheru Chi 1 chi.zheru@polyu.edu.hk 1 Department
3D Densely Convolutional Networks for Volumetric Segmentation. Toan Duc Bui, Jitae Shin, and Taesup Moon
 3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
arxiv: v1 [cs.cv] 15 Oct 2018
![arxiv: v1 [cs.cv] 15 Oct 2018](/thumbs/89/99052786.jpg "arxiv: v1 [cs.cv] 15 Oct 2018") Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Instance Segmentation and Object Detection with Bounding Shape Masks Ha Young Kim 1,2,*, Ba Rom Kang 2 1 Department of Financial Engineering, Ajou University Worldcupro 206, Yeongtong-gu, Suwon, 16499,
Semantic Soft Segmentation Supplementary Material
 Semantic Soft Segmentation Supplementary Material YAĞIZ AKSOY, MIT CSAIL and ETH Zürich TAE-HYUN OH, MIT CSAIL SYLVAIN PARIS, Adobe Research MARC POLLEFEYS, ETH Zürich and Microsoft WOJCIECH MATUSIK, MIT
Semantic Soft Segmentation Supplementary Material YAĞIZ AKSOY, MIT CSAIL and ETH Zürich TAE-HYUN OH, MIT CSAIL SYLVAIN PARIS, Adobe Research MARC POLLEFEYS, ETH Zürich and Microsoft WOJCIECH MATUSIK, MIT
arxiv: v1 [cs.cv] 26 May 2017
![arxiv: v1 [cs.cv] 26 May 2017](/thumbs/78/78157133.jpg "arxiv: v1 [cs.cv] 26 May 2017") arxiv:1705.09587v1 [cs.cv] 26 May 2017 J. JEONG, H. PARK AND N. KWAK: UNDER REVIEW IN BMVC 2017 1 Enhancement of SSD by concatenating feature maps for object detection Jisoo Jeong soo3553@snu.ac.kr Hyojin
arxiv:1705.09587v1 [cs.cv] 26 May 2017 J. JEONG, H. PARK AND N. KWAK: UNDER REVIEW IN BMVC 2017 1 Enhancement of SSD by concatenating feature maps for object detection Jisoo Jeong soo3553@snu.ac.kr Hyojin
Unified, real-time object detection
 Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Unified, real-time object detection Final Project Report, Group 02, 8 Nov 2016 Akshat Agarwal (13068), Siddharth Tanwar (13699) CS698N: Recent Advances in Computer Vision, Jul Nov 2016 Instructor: Gaurav
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
RDFNet: RGB-D Multi-level Residual Feature Fusion for Indoor Semantic Segmentation
 RDFNet: RGB-D Multi-level Residual Feature Fusion for Indoor Semantic Segmentation Seong-Jin Park POSTECH Ki-Sang Hong POSTECH {windray,hongks,leesy}@postech.ac.kr Seungyong Lee POSTECH Abstract In multi-class
RDFNet: RGB-D Multi-level Residual Feature Fusion for Indoor Semantic Segmentation Seong-Jin Park POSTECH Ki-Sang Hong POSTECH {windray,hongks,leesy}@postech.ac.kr Seungyong Lee POSTECH Abstract In multi-class
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Deep Dual Learning for Semantic Image Segmentation
 Deep Dual Learning for Semantic Image Segmentation Ping Luo 2 Guangrun Wang 1,2 Liang Lin 1,3 Xiaogang Wang 2 1 Sun Yat-Sen University 2 The Chinese University of Hong Kong 3 SenseTime Group (Limited)
Deep Dual Learning for Semantic Image Segmentation Ping Luo 2 Guangrun Wang 1,2 Liang Lin 1,3 Xiaogang Wang 2 1 Sun Yat-Sen University 2 The Chinese University of Hong Kong 3 SenseTime Group (Limited)
DifNet: Semantic Segmentation by Diffusion Networks
 DifNet: Semantic Segmentation by Diffusion Networks Peng Jiang 1 Fanglin Gu 1 Yunhai Wang 1 Changhe Tu 1 Baoquan Chen 2,1 1 Shandong University, China 2 Peking University, China sdujump@gmail.com, fanglin.gu@gmail.com,
DifNet: Semantic Segmentation by Diffusion Networks Peng Jiang 1 Fanglin Gu 1 Yunhai Wang 1 Changhe Tu 1 Baoquan Chen 2,1 1 Shandong University, China 2 Peking University, China sdujump@gmail.com, fanglin.gu@gmail.com,
Dense Image Labeling Using Deep Convolutional Neural Networks
 Dense Image Labeling Using Deep Convolutional Neural Networks Md Amirul Islam, Neil Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, MB {amirul, bruce, ywang}@cs.umanitoba.ca
Dense Image Labeling Using Deep Convolutional Neural Networks Md Amirul Islam, Neil Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, MB {amirul, bruce, ywang}@cs.umanitoba.ca
In-Place Activated BatchNorm for Memory- Optimized Training of DNNs
 In-Place Activated BatchNorm for Memory- Optimized Training of DNNs Samuel Rota Bulò, Lorenzo Porzi, Peter Kontschieder Mapillary Research Paper: https://arxiv.org/abs/1712.02616 Code: https://github.com/mapillary/inplace_abn
In-Place Activated BatchNorm for Memory- Optimized Training of DNNs Samuel Rota Bulò, Lorenzo Porzi, Peter Kontschieder Mapillary Research Paper: https://arxiv.org/abs/1712.02616 Code: https://github.com/mapillary/inplace_abn
arxiv: v1 [cs.cv] 23 Mar 2018
![arxiv: v1 [cs.cv] 23 Mar 2018](/thumbs/85/93001669.jpg "arxiv: v1 [cs.cv] 23 Mar 2018") Pyramid Stereo Matching Network Jia-Ren Chang Yong-Sheng Chen Department of Computer Science, National Chiao Tung University, Taiwan {followwar.cs00g, yschen}@nctu.edu.tw arxiv:03.0669v [cs.cv] 3 Mar 0
Pyramid Stereo Matching Network Jia-Ren Chang Yong-Sheng Chen Department of Computer Science, National Chiao Tung University, Taiwan {followwar.cs00g, yschen}@nctu.edu.tw arxiv:03.0669v [cs.cv] 3 Mar 0
PASCAL Boundaries: A Semantic Boundary Dataset with A Deep Semantic Boundary Detector
 PASCAL Boundaries: A Semantic Boundary Dataset with A Deep Semantic Boundary Detector Vittal Premachandran 1, Boyan Bonev 2, Xiaochen Lian 2, and Alan Yuille 1 1 Department of Computer Science, Johns Hopkins
PASCAL Boundaries: A Semantic Boundary Dataset with A Deep Semantic Boundary Detector Vittal Premachandran 1, Boyan Bonev 2, Xiaochen Lian 2, and Alan Yuille 1 1 Department of Computer Science, Johns Hopkins
arxiv: v2 [cs.cv] 16 Sep 2018
![arxiv: v2 [cs.cv] 16 Sep 2018](/thumbs/90/104336455.jpg "arxiv: v2 [cs.cv] 16 Sep 2018") Dual Attention Network for Scene Segmentation Jun Fu, Jing Liu, Haijie Tian, Zhiwei Fang, Hanqing Lu CASIA IVA {jun.fu, jliu, zhiwei.fang, luhq}@nlpr.ia.ac.cn,{hjtian bit}@63.com arxiv:809.0983v [cs.cv]
Dual Attention Network for Scene Segmentation Jun Fu, Jing Liu, Haijie Tian, Zhiwei Fang, Hanqing Lu CASIA IVA {jun.fu, jliu, zhiwei.fang, luhq}@nlpr.ia.ac.cn,{hjtian bit}@63.com arxiv:809.0983v [cs.cv]
arxiv: v2 [cs.cv] 19 Apr 2018
![arxiv: v2 [cs.cv] 19 Apr 2018](/thumbs/83/87325597.jpg "arxiv: v2 [cs.cv] 19 Apr 2018") arxiv:1804.06215v2 [cs.cv] 19 Apr 2018 DetNet: A Backbone network for Object Detection Zeming Li 1, Chao Peng 2, Gang Yu 2, Xiangyu Zhang 2, Yangdong Deng 1, Jian Sun 2 1 School of Software, Tsinghua University,
arxiv:1804.06215v2 [cs.cv] 19 Apr 2018 DetNet: A Backbone network for Object Detection Zeming Li 1, Chao Peng 2, Gang Yu 2, Xiangyu Zhang 2, Yangdong Deng 1, Jian Sun 2 1 School of Software, Tsinghua University,
Efficient Segmentation-Aided Text Detection For Intelligent Robots
 Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Efficient Segmentation-Aided Text Detection For Intelligent Robots Junting Zhang, Yuewei Na, Siyang Li, C.-C. Jay Kuo University of Southern California Outline Problem Definition and Motivation Related
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image. Supplementary Material
 Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Advanced Video Analysis & Imaging
 Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
Advanced Video Analysis & Imaging (5LSH0), Module 09B Machine Learning with Convolutional Neural Networks (CNNs) - Workout Farhad G. Zanjani, Clint Sebastian, Egor Bondarev, Peter H.N. de With ( p.h.n.de.with@tue.nl
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
In Defense of Fully Connected Layers in Visual Representation Transfer
 In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
LEARNING DENSE CONVOLUTIONAL EMBEDDINGS
 LEARNING DENSE CONVOLUTIONAL EMBEDDINGS FOR SEMANTIC SEGMENTATION Adam W. Harley & Konstantinos G. Derpanis Ryerson University {aharley,kosta}@scs.ryerson.ca Iasonas Kokkinos CentraleSupélec and INRIA
LEARNING DENSE CONVOLUTIONAL EMBEDDINGS FOR SEMANTIC SEGMENTATION Adam W. Harley & Konstantinos G. Derpanis Ryerson University {aharley,kosta}@scs.ryerson.ca Iasonas Kokkinos CentraleSupélec and INRIA
arxiv: v1 [cs.cv] 14 Dec 2015
![arxiv: v1 [cs.cv] 14 Dec 2015](/thumbs/72/67245194.jpg "arxiv: v1 [cs.cv] 14 Dec 2015") Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
PSANet: Point-wise Spatial Attention Network for Scene Parsing
 PSANet: Point-wise Spatial Attention Network for Scene Parsing engshuang Zhao 1, Yi Zhang 2, Shu Liu 1, Jianping Shi 3, Chen Change Loy 4, Dahua Lin 2, and Jiaya Jia 1,5 1 The Chinese University of ong
PSANet: Point-wise Spatial Attention Network for Scene Parsing engshuang Zhao 1, Yi Zhang 2, Shu Liu 1, Jianping Shi 3, Chen Change Loy 4, Dahua Lin 2, and Jiaya Jia 1,5 1 The Chinese University of ong
arxiv: v1 [cs.cv] 19 Mar 2018
![arxiv: v1 [cs.cv] 19 Mar 2018](/thumbs/78/77646221.jpg "arxiv: v1 [cs.cv] 19 Mar 2018") arxiv:1803.07066v1 [cs.cv] 19 Mar 2018 Learning Region Features for Object Detection Jiayuan Gu 1, Han Hu 2, Liwei Wang 1, Yichen Wei 2 and Jifeng Dai 2 1 Key Laboratory of Machine Perception, School of
arxiv:1803.07066v1 [cs.cv] 19 Mar 2018 Learning Region Features for Object Detection Jiayuan Gu 1, Han Hu 2, Liwei Wang 1, Yichen Wei 2 and Jifeng Dai 2 1 Key Laboratory of Machine Perception, School of
LEARNING DENSE CONVOLUTIONAL EMBEDDINGS
 LEARNING DENSE CONVOLUTIONAL EMBEDDINGS FOR SEMANTIC SEGMENTATION Adam W. Harley & Konstantinos G. Derpanis Ryerson University {aharley,kosta}@scs.ryerson.ca Iasonas Kokkinos CentraleSupélec and INRIA
LEARNING DENSE CONVOLUTIONAL EMBEDDINGS FOR SEMANTIC SEGMENTATION Adam W. Harley & Konstantinos G. Derpanis Ryerson University {aharley,kosta}@scs.ryerson.ca Iasonas Kokkinos CentraleSupélec and INRIA
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
FishNet: A Versatile Backbone for Image, Region, and Pixel Level Prediction
 FishNet: A Versatile Backbone for Image, Region, and Pixel Level Prediction Shuyang Sun 1, Jiangmiao Pang 3, Jianping Shi 2, Shuai Yi 2, Wanli Ouyang 1 1 The University of Sydney 2 SenseTime Research 3
FishNet: A Versatile Backbone for Image, Region, and Pixel Level Prediction Shuyang Sun 1, Jiangmiao Pang 3, Jianping Shi 2, Shuai Yi 2, Wanli Ouyang 1 1 The University of Sydney 2 SenseTime Research 3
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Geometry-aware Traffic Flow Analysis by Detection and Tracking
 Geometry-aware Traffic Flow Analysis by Detection and Tracking 1,2 Honghui Shi, 1 Zhonghao Wang, 1,2 Yang Zhang, 1,3 Xinchao Wang, 1 Thomas Huang 1 IFP Group, Beckman Institute at UIUC, 2 IBM Research,
Geometry-aware Traffic Flow Analysis by Detection and Tracking 1,2 Honghui Shi, 1 Zhonghao Wang, 1,2 Yang Zhang, 1,3 Xinchao Wang, 1 Thomas Huang 1 IFP Group, Beckman Institute at UIUC, 2 IBM Research,
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks
 Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
arxiv: v3 [cs.cv] 21 Aug 2018
![arxiv: v3 [cs.cv] 21 Aug 2018](/thumbs/84/91200697.jpg "arxiv: v3 [cs.cv] 21 Aug 2018") Adaptive Affinity Fields for Semantic Segmentation Tsung-Wei Ke*, Jyh-Jing Hwang*, Ziwei Liu, and Stella X. Yu UC Berkeley / ICSI {twke,jyh,zwliu,stellayu}@berkeley.edu arxiv:1803.10335v3 [cs.cv] 21 Aug
Adaptive Affinity Fields for Semantic Segmentation Tsung-Wei Ke*, Jyh-Jing Hwang*, Ziwei Liu, and Stella X. Yu UC Berkeley / ICSI {twke,jyh,zwliu,stellayu}@berkeley.edu arxiv:1803.10335v3 [cs.cv] 21 Aug
BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation
 BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com Abstract Recent leading
BoxSup: Exploiting Bounding Boxes to Supervise Convolutional Networks for Semantic Segmentation Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com Abstract Recent leading
Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset
 Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset Suyash Shetty Manipal Institute of Technology suyash.shashikant@learner.manipal.edu Abstract In
Application of Convolutional Neural Network for Image Classification on Pascal VOC Challenge 2012 dataset Suyash Shetty Manipal Institute of Technology suyash.shashikant@learner.manipal.edu Abstract In
Conditional Random Fields as Recurrent Neural Networks
 BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Iteratively Trained Interactive Segmentation
 MAHADEVAN ET AL.: ITERATIVELY TRAINED INTERACTIVE SEGMENTATION 1 Iteratively Trained Interactive Segmentation Sabarinath Mahadevan mahadevan@vision.rwth-aachen.de Paul Voigtlaender voigtlaender@vision.rwth-aachen.de
MAHADEVAN ET AL.: ITERATIVELY TRAINED INTERACTIVE SEGMENTATION 1 Iteratively Trained Interactive Segmentation Sabarinath Mahadevan mahadevan@vision.rwth-aachen.de Paul Voigtlaender voigtlaender@vision.rwth-aachen.de
arxiv: v1 [cs.cv] 5 Apr 2017
![arxiv: v1 [cs.cv] 5 Apr 2017](/thumbs/81/82990255.jpg "arxiv: v1 [cs.cv] 5 Apr 2017") Not All Pixels Are Equal: Difficulty-Aware Semantic Segmentation via Deep Layer Cascade Xiaoxiao Li 1 Ziwei Liu 1 Ping Luo 2,1 Chen Change Loy 1,2 Xiaoou Tang 1,2 1 Department of Information Engineering,
Not All Pixels Are Equal: Difficulty-Aware Semantic Segmentation via Deep Layer Cascade Xiaoxiao Li 1 Ziwei Liu 1 Ping Luo 2,1 Chen Change Loy 1,2 Xiaoou Tang 1,2 1 Department of Information Engineering,
Boundary-aware Instance Segmentation
 Boundary-aware Instance Segmentation Zeeshan Hayder,2, Xuming He 2, Australian National University & 2 Data6/CSIRO Mathieu Salzmann 3 3 CVLab, EPFL, Switzerland Abstract We address the problem of instance-level
Boundary-aware Instance Segmentation Zeeshan Hayder,2, Xuming He 2, Australian National University & 2 Data6/CSIRO Mathieu Salzmann 3 3 CVLab, EPFL, Switzerland Abstract We address the problem of instance-level
Constrained Convolutional Neural Networks for Weakly Supervised Segmentation
 Constrained Convolutional Neural Networks for Weakly Supervised Segmentation Deepak Pathak Philipp Krähenbühl Trevor Darrell University of California, Berkeley {pathak,philkr,trevor}@cs.berkeley.edu Abstract
Constrained Convolutional Neural Networks for Weakly Supervised Segmentation Deepak Pathak Philipp Krähenbühl Trevor Darrell University of California, Berkeley {pathak,philkr,trevor}@cs.berkeley.edu Abstract
Amodal and Panoptic Segmentation. Stephanie Liu, Andrew Zhou
 Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan
Amodal and Panoptic Segmentation Stephanie Liu, Andrew Zhou This lecture: 1. 2. 3. 4. Semantic Amodal Segmentation Cityscapes Dataset ADE20K Dataset Panoptic Segmentation Semantic Amodal Segmentation Yan