Full-Colour, Computational Ghost Video. Miles Padgett Kelvin Chair of Natural Philosophy
|
|
|
- Lesley Flowers
- 6 years ago
- Views:
Transcription


1 Full-Colour, Computational Ghost Video Miles Padgett Kelvin Chair of Natural Philosophy


2 A Quantum Ghost Imager! Generate random photon pairs, illuminate both object and camera SPDC CCD Identical copies of single photon Illuminate object with pattern Measure scattered light
3 A Classical Ghost Imager! Generate random speckle, illuminate both object and camera Light diffuser CCD Identical copies of speckle pattern Illuminate object with pattern Light Source Laser or Thermal source Random Pattern Measure scattered light
4 A Computational Ghost Imager! Generate deterministic speckle using spatial light modulator, no need for CCD the computer already knows! Spatial Light modulator Identical copies of random pattern Illuminate object with pattern Light Source Laser or Thermal source Random Pattern Measure scattered light
5



6 ! 3D Computational Ghost Imaging!! Dr. Matthew Edgar! Mr. Baoqing Sun! Mr. Stephen Welsh! Dr. Richard Bowman! and L E Vittert Prof A Bowman (Statistics)!
7 Ghost imaging with classical light! Experimental setup for 3D computational ghost imaging!

8 Projecting a series of random pattern!
 Need N different patterns to give")
9 Traditional Ghost Imaging! N random pattern X (detector signal - average detector signal) Need N different patterns to give N pixel image Or use compressive techniques (c.f. JPEG) to do better!

10 Traditional Ghost Imaging!

11 Ghost imaging with classical light! Iterative reconstruction of 2D image! Test object (toy skull)!
12 How many measurement does an image require?! Reasonable to assume no. of measurements = no. of pixels!! When the number of unknowns exceeds the amount of data then many different solutions fit the data perfectly! i.e. χ 2 /Ν =0 But (in the presence of noise) it is very unlikely that your measured all data was perfect. Much more likely is that χ 2 /Ν 1! So of all these possible solutions (images) which one should you pick?!! Real images! - Only have positive intensities! - Can be JPEG compressed (they are sparse in spatial frequency)! Least squares fitting is a necessary, but not sufficient, strategy

 pixels 2700")


13 Compressive Ghost Imaging! Object & example of random illumination 64x 84 (=5376) pixels 2700 patterns Recon by Chi-squared minimization χ 2 /N 0 Σ DCT 100k Chi-squared solution + regularization χ 2 /N 1 Σ DCT 50k

14 How to optimise (Random Search)! Keep making small changes to image R is a measure of Entropy or DCT sparsity, or total variation etc. Calculate Cost of solution χ 2 /Ν + λ x R = cost Recalculate Cost χ 2 /Ν + λ x R = cost Repeat, keeping only those changes which reduce cost Many possible solutions have an acceptable, so pick the one of these that has other properties too.. χ 2


15 Normal Imaging with off-axis illumination!

16 Ghost Imaging with off-axis detection!

17 3D Ghost Imaging with classical light! Experimental setup for 3D computational ghost imaging!


18 3D Ghost Imaging with classical light! Surface Gradients Display random patterns at 660Hz Integrate gradients (and optimize) to give surface profile
19 3D Computational Ghost Imaging!

20 Calculating surface gradients! Right Left - dz/dx Surface gradient Right Left + Works with real images too, shape from shade
21 Calculating Surface height! dz/dx Surface gradient dz/dy Surface gradient Integrate to give surface height (z) but with what boundary condition? z(x=0)=0, or z(y=0)=0 etc

 and/or smoothness (i.")
22 How to optimise! Make random change to surface Recalculate gradients Compare to measured gradients Calculate χ 2 and add regularisation to give total cost of solution χ 2 + λ x R = cost Repeat, keeping only those changes which reduce cost Regularisation is properties of solution we d like to encourage e.g. flatness (i.e. minimise sum of z) and/or smoothness (i.e. minimise sum of d 2 z/dx 2 ) Set λ at sensible value.

23 Calculating Surface height! Average over several possible boundary condition Apply optimisation

24 3D Computational Ghost Imaging! Insert video of toy skull here

25 Colour Computational Ghost Imaging!









26 Colour Computational Ghost Imaging!
27 A Computational Ghost Imager! Generate deterministic speckle using spatial light modulator, no need for CCD the computer already knows! Spatial Light modulator Identical copies of random pattern Illuminate object with pattern Light Source Laser or Thermal source Random Pattern Measure scattered light




28 A single-pixel Imager! Filter the scattered light use all the same algorithms as a computational ghost imager Spatial Light modulator Identical copies of random pattern Illuminate object with pattern Measure scattered light (filtered by spatial light modulator) Random Pattern


 Many Hadamards")


29 Tips of the trade! Don t use random patterns use Hadamard patterns Hadmards are orthogonal to each other (unlike random) Many Hadamards are redundant within any real image (unlike random) Display every pattern and a +ve and ve pair (common mode rejection)

30 Single (RGB) pixel video!
")


31 Single (RGB) pixel video!










32 What next?! Ghost imaging with correlated light Imaging at non visible and/or many wavelengths Imaging of Gas Emissions Single Pixel Microscopy/ video Imaging of polarisation anomalies Single pixel (Ghost) Imaging

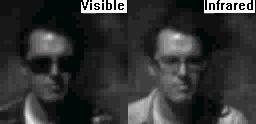
33 Visible vs. SWIR video!



34 Thank you! Ghost imaging with correlated light
Multi-wavelength compressive computational ghost imaging
 Multi-wavelength compressive computational ghost imaging Stephen S. Welsh a, Matthew P. Edgar a, Phillip Jonathan b, Baoqing Sun a, Miles. J. Padgett a a University of Glasgow, Kelvin Building University
Multi-wavelength compressive computational ghost imaging Stephen S. Welsh a, Matthew P. Edgar a, Phillip Jonathan b, Baoqing Sun a, Miles. J. Padgett a a University of Glasgow, Kelvin Building University
A copy can be downloaded for personal non-commercial research or study, without prior permission or charge
 Welsh, S.S., Edgar, M.P., Bowman, R., Jonathan, P., Sun, B., and Padgett, M.J. (2013) Fast full-color computational imaging with single-pixel detectors. Optics Express, 21 (20). pp. 23068-23074. ISSN 1094-4087
Welsh, S.S., Edgar, M.P., Bowman, R., Jonathan, P., Sun, B., and Padgett, M.J. (2013) Fast full-color computational imaging with single-pixel detectors. Optics Express, 21 (20). pp. 23068-23074. ISSN 1094-4087
Normalized ghost imaging
 Normalized ghost imaging The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Sun, Baoqing, Stephen S. Welsh, Matthew P. Edgar,
Normalized ghost imaging The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Sun, Baoqing, Stephen S. Welsh, Matthew P. Edgar,
3D Computational Ghost Imaging
 3D Computational Ghost Imaging arxiv:1301.1595v2 [physics.optics] 15 May 2013 B. Sun, 1 M. P. Edgar, 1 R. Bowman, 1 L. E. Vittert, 2 S. Welsh, 1 A. Bowman, 2 and M. J. Padgett 1 1 SUPA, School of Physics
3D Computational Ghost Imaging arxiv:1301.1595v2 [physics.optics] 15 May 2013 B. Sun, 1 M. P. Edgar, 1 R. Bowman, 1 L. E. Vittert, 2 S. Welsh, 1 A. Bowman, 2 and M. J. Padgett 1 1 SUPA, School of Physics
y z x SNR(dB) RMSE(mm)
 RMSE(mm)") a b c d y z x SNR(dB) RMSE(mm) 30.16 2.94 20.28 6.56 10.33 13.74 0.98 25.37 Supplementary Figure 1: System performance with different noise levels. The SNRs are the mean SNR of all measured signals corresponding
a b c d y z x SNR(dB) RMSE(mm) 30.16 2.94 20.28 6.56 10.33 13.74 0.98 25.37 Supplementary Figure 1: System performance with different noise levels. The SNRs are the mean SNR of all measured signals corresponding
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Engineered Diffusers Intensity vs Irradiance
 Engineered Diffusers Intensity vs Irradiance Engineered Diffusers are specified by their divergence angle and intensity profile. The divergence angle usually is given as the width of the intensity distribution
Engineered Diffusers Intensity vs Irradiance Engineered Diffusers are specified by their divergence angle and intensity profile. The divergence angle usually is given as the width of the intensity distribution
Supplementary Materials for
 advances.sciencemag.org/cgi/content/full/3/4/1601782/dc1 Supplementary Materials for Adaptive foveated single-pixel imaging with dynamic supersampling David B. Phillips, Ming-Jie Sun, Jonathan M. Taylor,
advances.sciencemag.org/cgi/content/full/3/4/1601782/dc1 Supplementary Materials for Adaptive foveated single-pixel imaging with dynamic supersampling David B. Phillips, Ming-Jie Sun, Jonathan M. Taylor,
SIMULATION AND VISUALIZATION IN THE EDUCATION OF COHERENT OPTICS
 SIMULATION AND VISUALIZATION IN THE EDUCATION OF COHERENT OPTICS J. KORNIS, P. PACHER Department of Physics Technical University of Budapest H-1111 Budafoki út 8., Hungary e-mail: kornis@phy.bme.hu, pacher@phy.bme.hu
SIMULATION AND VISUALIZATION IN THE EDUCATION OF COHERENT OPTICS J. KORNIS, P. PACHER Department of Physics Technical University of Budapest H-1111 Budafoki út 8., Hungary e-mail: kornis@phy.bme.hu, pacher@phy.bme.hu
SUPPLEMENTARY INFORMATION
 Supplementary Information Compact spectrometer based on a disordered photonic chip Brandon Redding, Seng Fatt Liew, Raktim Sarma, Hui Cao* Department of Applied Physics, Yale University, New Haven, CT
Supplementary Information Compact spectrometer based on a disordered photonic chip Brandon Redding, Seng Fatt Liew, Raktim Sarma, Hui Cao* Department of Applied Physics, Yale University, New Haven, CT
SUPPLEMENTARY INFORMATION DOI: /NPHOTON
 DOI:.38/NPHOTON.2.85 This supplement has two parts. In part A, we provide the rigorous details of the wavefront correction algorithm and show numerical simulations and experimental data for the cases of
DOI:.38/NPHOTON.2.85 This supplement has two parts. In part A, we provide the rigorous details of the wavefront correction algorithm and show numerical simulations and experimental data for the cases of
Single Photon Interference
 December 19, 2006 D. Lancia P. McCarthy Classical Interference Intensity Distribution Overview Quantum Mechanical Interference Probability Distribution Which Path? The Effects of Making a Measurement Wave-Particle
December 19, 2006 D. Lancia P. McCarthy Classical Interference Intensity Distribution Overview Quantum Mechanical Interference Probability Distribution Which Path? The Effects of Making a Measurement Wave-Particle
w Foley, Section16.1 Reading
 Shading w Foley, Section16.1 Reading Introduction So far, we ve talked exclusively about geometry. w What is the shape of an object? w How do I place it in a virtual 3D space? w How do I know which pixels
Shading w Foley, Section16.1 Reading Introduction So far, we ve talked exclusively about geometry. w What is the shape of an object? w How do I place it in a virtual 3D space? w How do I know which pixels
Texture. Announcements. 2) Synthesis. Issues: 1) Discrimination/Analysis
 Synthesis. Issues: 1) Discrimination/Analysis") Announcements For future problems sets: email matlab code by 11am, due date (same as deadline to hand in hardcopy). Today s reading: Chapter 9, except 9.4. Texture Edge detectors find differences in overall
Announcements For future problems sets: email matlab code by 11am, due date (same as deadline to hand in hardcopy). Today s reading: Chapter 9, except 9.4. Texture Edge detectors find differences in overall
Performance analysis of ghost imaging lidar in background light environment
 Research Article Vol. 5, No. 5 / October 2017 / Photonics Research 431 Performance analysis of ghost imaging lidar in background light environment CHENJIN DENG, 1,2 LONG PAN, 1,2 CHENGLONG WANG, 1,2 XIN
Research Article Vol. 5, No. 5 / October 2017 / Photonics Research 431 Performance analysis of ghost imaging lidar in background light environment CHENJIN DENG, 1,2 LONG PAN, 1,2 CHENGLONG WANG, 1,2 XIN
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Dr. Larry J. Paxton Johns Hopkins University Applied Physics Laboratory Laurel, MD (301) (301) fax
 (301) fax") Dr. Larry J. Paxton Johns Hopkins University Applied Physics Laboratory Laurel, MD 20723 (301) 953-6871 (301) 953-6670 fax Understand the instrument. Be able to convert measured counts/pixel on-orbit into
Dr. Larry J. Paxton Johns Hopkins University Applied Physics Laboratory Laurel, MD 20723 (301) 953-6871 (301) 953-6670 fax Understand the instrument. Be able to convert measured counts/pixel on-orbit into
Measurement of droplets temperature by using a global rainbow technique with a pulse laser
 , 23rd Annual Conference on Liquid Atomization and Spray Systems, Brno, Czech Republic, September 2010 Measurement of droplets temperature by using a global rainbow technique with a pulse laser S. Saengkaew,
, 23rd Annual Conference on Liquid Atomization and Spray Systems, Brno, Czech Republic, September 2010 Measurement of droplets temperature by using a global rainbow technique with a pulse laser S. Saengkaew,
Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude
 Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude A. Migukin *, V. atkovnik and J. Astola Department of Signal Processing, Tampere University of Technology,
Advanced phase retrieval: maximum likelihood technique with sparse regularization of phase and amplitude A. Migukin *, V. atkovnik and J. Astola Department of Signal Processing, Tampere University of Technology,
Final Review. Image Processing CSE 166 Lecture 18
 Final Review Image Processing CSE 166 Lecture 18 Topics covered Basis vectors Matrix based transforms Wavelet transform Image compression Image watermarking Morphological image processing Segmentation
Final Review Image Processing CSE 166 Lecture 18 Topics covered Basis vectors Matrix based transforms Wavelet transform Image compression Image watermarking Morphological image processing Segmentation
WORCESTER POLYTECHNIC INSTITUTE
 WORCESTER POLYTECHNIC INSTITUTE MECHANICAL ENGINEERING DEPARTMENT Optical Metrology and NDT ME-593L, C 2018 Introduction: Wave Optics January 2018 Wave optics: coherence Temporal coherence Review interference
WORCESTER POLYTECHNIC INSTITUTE MECHANICAL ENGINEERING DEPARTMENT Optical Metrology and NDT ME-593L, C 2018 Introduction: Wave Optics January 2018 Wave optics: coherence Temporal coherence Review interference
Physics-based Vision: an Introduction
 Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Detectors for Future Light Sources. Gerhard Grübel Deutsches Elektronen Synchrotron (DESY) Notke-Str. 85, Hamburg
 Notke-Str. 85, Hamburg") Detectors for Future Light Sources Gerhard Grübel Deutsches Elektronen Synchrotron (DESY) Notke-Str. 85, 22607 Hamburg Overview Radiation from X-Ray Free Electron lasers (XFEL, LCLS) Ultrafast detectors
Detectors for Future Light Sources Gerhard Grübel Deutsches Elektronen Synchrotron (DESY) Notke-Str. 85, 22607 Hamburg Overview Radiation from X-Ray Free Electron lasers (XFEL, LCLS) Ultrafast detectors
EECS490: Digital Image Processing. Lecture #19
 Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Lecture #19 Shading and texture analysis using morphology Gray scale reconstruction Basic image segmentation: edges v. regions Point and line locators, edge types and noise Edge operators: LoG, DoG, Canny
Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation. Range Imaging Through Triangulation
 Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Obviously, this is a very slow process and not suitable for dynamic scenes. To speed things up, we can use a laser that projects a vertical line of light onto the scene. This laser rotates around its vertical
Introduction. Lighting model Light reflection model Local illumination model Reflectance model BRDF
 Shading Introduction Affine transformations help us to place objects into a scene. Before creating images of these objects, we ll look at models for how light interacts with their surfaces. Such a model
Shading Introduction Affine transformations help us to place objects into a scene. Before creating images of these objects, we ll look at models for how light interacts with their surfaces. Such a model
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Simulation studies for design of pellet tracking systems
 Simulation studies for design of pellet tracking systems A. Pyszniak 1,2, H. Calén 1, K. Fransson 1, M. Jacewicz 1, T. Johansson 1, Z. Rudy 2 1 Department of Physics and Astronomy, Uppsala University,
Simulation studies for design of pellet tracking systems A. Pyszniak 1,2, H. Calén 1, K. Fransson 1, M. Jacewicz 1, T. Johansson 1, Z. Rudy 2 1 Department of Physics and Astronomy, Uppsala University,
Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar
 Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar Shaun I. Kelly The University of Edinburgh 1 Outline 1 SAR Basics 2 Compressed Sensing SAR 3 Other Applications of Sparsity
Compressive Sensing Applications and Demonstrations: Synthetic Aperture Radar Shaun I. Kelly The University of Edinburgh 1 Outline 1 SAR Basics 2 Compressed Sensing SAR 3 Other Applications of Sparsity
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Computational Photography and Video: Intrinsic Images. Prof. Marc Pollefeys Dr. Gabriel Brostow
 Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow Last Week Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography
Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow Last Week Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography
3. (a) Prove any four properties of 2D Fourier Transform. (b) Determine the kernel coefficients of 2D Hadamard transforms for N=8.
 Prove any four properties of 2D Fourier Transform. (b) Determine the kernel coefficients of 2D Hadamard transforms for N=8.") Set No.1 1. (a) What are the applications of Digital Image Processing? Explain how a digital image is formed? (b) Explain with a block diagram about various steps in Digital Image Processing. [6+10] 2.
Set No.1 1. (a) What are the applications of Digital Image Processing? Explain how a digital image is formed? (b) Explain with a block diagram about various steps in Digital Image Processing. [6+10] 2.
Optimization. Intelligent Scissors (see also Snakes)
") Optimization We can define a cost for possible solutions Number of solutions is large (eg., exponential) Efficient search is needed Global methods: cleverly find best solution without considering all.
Optimization We can define a cost for possible solutions Number of solutions is large (eg., exponential) Efficient search is needed Global methods: cleverly find best solution without considering all.
LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION
 LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION Ammar Zayouna Richard Comley Daming Shi Middlesex University School of Engineering and Information Sciences Middlesex University, London NW4 4BT, UK A.Zayouna@mdx.ac.uk
LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION Ammar Zayouna Richard Comley Daming Shi Middlesex University School of Engineering and Information Sciences Middlesex University, London NW4 4BT, UK A.Zayouna@mdx.ac.uk
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Illumination and Shading
 Illumination and Shading Illumination (Lighting)! Model the interaction of light with surface points to determine their final color and brightness! The illumination can be computed either at vertices or
Illumination and Shading Illumination (Lighting)! Model the interaction of light with surface points to determine their final color and brightness! The illumination can be computed either at vertices or
REDUCED ORDER MODELING IN MULTISPECTRAL PHOTOACOUSTIC TOMOGRAPHY
 REDUCED ORDER MODELING IN MULTISPECTRAL PHOTOACOUSTIC TOMOGRAPHY Arvind Saibaba Sarah Vallélian Statistical and Applied Mathematical Sciences Institute & North Carolina State University May 26, 2016 OUTLINE
REDUCED ORDER MODELING IN MULTISPECTRAL PHOTOACOUSTIC TOMOGRAPHY Arvind Saibaba Sarah Vallélian Statistical and Applied Mathematical Sciences Institute & North Carolina State University May 26, 2016 OUTLINE
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Rendering: Reality. Eye acts as pinhole camera. Photons from light hit objects
 Basic Ray Tracing Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as
Basic Ray Tracing Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as pinhole camera Photons from light hit objects Rendering: Reality Eye acts as
CS 490: Computer Vision Image Segmentation: Thresholding. Fall 2015 Dr. Michael J. Reale
 CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
CS 490: Computer Vision Image Segmentation: Thresholding Fall 205 Dr. Michael J. Reale FUNDAMENTALS Introduction Before we talked about edge-based segmentation Now, we will discuss a form of regionbased
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Shading. Brian Curless CSE 557 Autumn 2017
 Shading Brian Curless CSE 557 Autumn 2017 1 Reading Optional: Angel and Shreiner: chapter 5. Marschner and Shirley: chapter 10, chapter 17. Further reading: OpenGL red book, chapter 5. 2 Basic 3D graphics
Shading Brian Curless CSE 557 Autumn 2017 1 Reading Optional: Angel and Shreiner: chapter 5. Marschner and Shirley: chapter 10, chapter 17. Further reading: OpenGL red book, chapter 5. 2 Basic 3D graphics
Color encoding of phase: a new step in imaging by structured light and single pixel detection
 Color encoding of phase: a new step in imaging by structured light and single pixel detection Edoardo De Tommasi, Luigi Lavanga Institute for Microelectronics and Microsystems, Department of Naples National
Color encoding of phase: a new step in imaging by structured light and single pixel detection Edoardo De Tommasi, Luigi Lavanga Institute for Microelectronics and Microsystems, Department of Naples National
Independent Resolution Test of
 Independent Resolution Test of as conducted and published by Dr. Adam Puche, PhD University of Maryland June 2005 as presented by (formerly Thales Optem Inc.) www.qioptiqimaging.com Independent Resolution
Independent Resolution Test of as conducted and published by Dr. Adam Puche, PhD University of Maryland June 2005 as presented by (formerly Thales Optem Inc.) www.qioptiqimaging.com Independent Resolution
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Full surface strain measurement using shearography
 Full surface strain measurement using shearography Roger M. Groves, Stephen W. James * and Ralph P. Tatam Centre for Photonics and Optical Engineering, School of Engineering, Cranfield University ABSTRACT
Full surface strain measurement using shearography Roger M. Groves, Stephen W. James * and Ralph P. Tatam Centre for Photonics and Optical Engineering, School of Engineering, Cranfield University ABSTRACT
CS 563 Advanced Topics in Computer Graphics Irradiance Caching and Particle Tracing. by Stephen Kazmierczak
 CS 563 Advanced Topics in Computer Graphics Irradiance Caching and Particle Tracing by Stephen Kazmierczak Introduction Unbiased light transport algorithms can sometimes take a large number of rays to
CS 563 Advanced Topics in Computer Graphics Irradiance Caching and Particle Tracing by Stephen Kazmierczak Introduction Unbiased light transport algorithms can sometimes take a large number of rays to
Distributed Ray Tracing
 CT5510: Computer Graphics Distributed Ray Tracing BOCHANG MOON Distributed Ray Tracing Motivation The classical ray tracing produces very clean images (look fake) Perfect focus Perfect reflections Sharp
CT5510: Computer Graphics Distributed Ray Tracing BOCHANG MOON Distributed Ray Tracing Motivation The classical ray tracing produces very clean images (look fake) Perfect focus Perfect reflections Sharp
Applications of adaptive optics in femtosecond laser material processing
 Applications of adaptive optics in femtosecond laser material processing STFC / Photonics KTN - Laser Applications of Adaptive Optics Professor Derryck T. Reid Ultrafast Optics Group School of Engineering
Applications of adaptive optics in femtosecond laser material processing STFC / Photonics KTN - Laser Applications of Adaptive Optics Professor Derryck T. Reid Ultrafast Optics Group School of Engineering
Méthodes d imagerie pour les écoulements et le CND
 Méthodes d imagerie pour les écoulements et le CND Journée scientifique FED3G CEA LIST/Lab Imagerie Tomographie et Traitement Samuel Legoupil 15 juin 2012 2D/3D imaging tomography Example Petrochemical
Méthodes d imagerie pour les écoulements et le CND Journée scientifique FED3G CEA LIST/Lab Imagerie Tomographie et Traitement Samuel Legoupil 15 juin 2012 2D/3D imaging tomography Example Petrochemical
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
Introduction to Visualization and Computer Graphics
 Introduction to Visualization and Computer Graphics DH2320, Fall 2015 Prof. Dr. Tino Weinkauf Introduction to Visualization and Computer Graphics Visibility Shading 3D Rendering Geometric Model Color Perspective
Introduction to Visualization and Computer Graphics DH2320, Fall 2015 Prof. Dr. Tino Weinkauf Introduction to Visualization and Computer Graphics Visibility Shading 3D Rendering Geometric Model Color Perspective
Biological Image Information I: A Description of the Modalities
 2.771J BEH.453J HST.958J Spring 2005 Lecture 21 April 2005 Biological Image I: A Description of the Modalities The Modalities Direct photography SEM and TEM Cryo-EM Two-photon microscopy Confocal microscopy
2.771J BEH.453J HST.958J Spring 2005 Lecture 21 April 2005 Biological Image I: A Description of the Modalities The Modalities Direct photography SEM and TEM Cryo-EM Two-photon microscopy Confocal microscopy
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Visualisatie BMT. Rendering. Arjan Kok
 Visualisatie BMT Rendering Arjan Kok a.j.f.kok@tue.nl 1 Lecture overview Color Rendering Illumination 2 Visualization pipeline Raw Data Data Enrichment/Enhancement Derived Data Visualization Mapping Abstract
Visualisatie BMT Rendering Arjan Kok a.j.f.kok@tue.nl 1 Lecture overview Color Rendering Illumination 2 Visualization pipeline Raw Data Data Enrichment/Enhancement Derived Data Visualization Mapping Abstract
LAGRANGIAN PARTICLE TRACKING IN ISOTROPIC TURBULENT FLOW VIA HOLOGRAPHIC AND INTENSITY BASED STEREOSCOPY. By Kamran Arjomand
 LAGRANGIAN PARTICLE TRACKING IN ISOTROPIC TURBULENT FLOW VIA HOLOGRAPHIC AND INTENSITY BASED STEREOSCOPY By Kamran Arjomand I. Background A. Holographic Imaging 1. Acquire Hologram 3. Numerical Reconstruction
LAGRANGIAN PARTICLE TRACKING IN ISOTROPIC TURBULENT FLOW VIA HOLOGRAPHIC AND INTENSITY BASED STEREOSCOPY By Kamran Arjomand I. Background A. Holographic Imaging 1. Acquire Hologram 3. Numerical Reconstruction
Overview. Video. Overview 4/7/2008. Optical flow. Why estimate motion? Motion estimation: Optical flow. Motion Magnification Colorization.
 Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Overview Video Optical flow Motion Magnification Colorization Lecture 9 Optical flow Motion Magnification Colorization Overview Optical flow Combination of slides from Rick Szeliski, Steve Seitz, Alyosha
Graphics for VEs. Ruth Aylett
 Graphics for VEs Ruth Aylett Overview VE Software Graphics for VEs The graphics pipeline Projections Lighting Shading Runtime VR systems Two major parts: initialisation and update loop. Initialisation
Graphics for VEs Ruth Aylett Overview VE Software Graphics for VEs The graphics pipeline Projections Lighting Shading Runtime VR systems Two major parts: initialisation and update loop. Initialisation
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Tomographic reconstruction: the challenge of dark information. S. Roux
 Tomographic reconstruction: the challenge of dark information S. Roux Meeting on Tomography and Applications, Politecnico di Milano, 20-22 April, 2015 Tomography A mature technique, providing an outstanding
Tomographic reconstruction: the challenge of dark information S. Roux Meeting on Tomography and Applications, Politecnico di Milano, 20-22 April, 2015 Tomography A mature technique, providing an outstanding
Presentation and analysis of multidimensional data sets
 Presentation and analysis of multidimensional data sets Overview 1. 3D data visualisation Multidimensional images Data pre-processing Visualisation methods Multidimensional images wavelength time 3D image
Presentation and analysis of multidimensional data sets Overview 1. 3D data visualisation Multidimensional images Data pre-processing Visualisation methods Multidimensional images wavelength time 3D image
Image Processing. BITS Pilani. Dr Jagadish Nayak. Dubai Campus
 Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Image Processing BITS Pilani Dubai Campus Dr Jagadish Nayak Image Segmentation BITS Pilani Dubai Campus Fundamentals Let R be the entire spatial region occupied by an image Process that partitions R into
Large-Scale 3D Point Cloud Processing Tutorial 2013
 Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Large-Scale 3D Point Cloud Processing Tutorial 2013 Features The image depicts how our robot Irma3D sees itself in a mirror. The laser looking into itself creates distortions as well as changes in Prof.
Optic Flow and Basics Towards Horn-Schunck 1
 Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Optic Flow and Basics Towards Horn-Schunck 1 Lecture 7 See Section 4.1 and Beginning of 4.2 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information.
Roughness parameters and surface deformation measured by "Coherence Radar" P. Ettl, B. Schmidt, M. Schenk, I. Laszlo, G. Häusler
 Roughness parameters and surface deformation measured by "Coherence Radar" P. Ettl, B. Schmidt, M. Schenk, I. Laszlo, G. Häusler University of Erlangen, Chair for Optics Staudtstr. 7/B2, 91058 Erlangen,
Roughness parameters and surface deformation measured by "Coherence Radar" P. Ettl, B. Schmidt, M. Schenk, I. Laszlo, G. Häusler University of Erlangen, Chair for Optics Staudtstr. 7/B2, 91058 Erlangen,
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
DLIT and FLIT Reconstruction of Sources
 Concept Tech Note 5 DLIT and FLIT Reconstruction of Sources Diffuse Luminescence Imaging Tomography (DLIT) is a technique that analyzes images of the surface light emission from a living subject to generate
Concept Tech Note 5 DLIT and FLIT Reconstruction of Sources Diffuse Luminescence Imaging Tomography (DLIT) is a technique that analyzes images of the surface light emission from a living subject to generate
Minimizing Noise and Bias in 3D DIC. Correlated Solutions, Inc.
 Minimizing Noise and Bias in 3D DIC Correlated Solutions, Inc. Overview Overview of Noise and Bias Digital Image Correlation Background/Tracking Function Minimizing Noise Focus Contrast/Lighting Glare
Minimizing Noise and Bias in 3D DIC Correlated Solutions, Inc. Overview Overview of Noise and Bias Digital Image Correlation Background/Tracking Function Minimizing Noise Focus Contrast/Lighting Glare
Motion Estimation for Video Coding Standards
 Motion Estimation for Video Coding Standards Prof. Ja-Ling Wu Department of Computer Science and Information Engineering National Taiwan University Introduction of Motion Estimation The goal of video compression
Motion Estimation for Video Coding Standards Prof. Ja-Ling Wu Department of Computer Science and Information Engineering National Taiwan University Introduction of Motion Estimation The goal of video compression
dq dt I = Irradiance or Light Intensity is Flux Φ per area A (W/m 2 ) Φ =
 Φ =") Radiometry (From Intro to Optics, Pedrotti -4) Radiometry is measurement of Emag radiation (light) Consider a small spherical source Total energy radiating from the body over some time is Q total Radiant
Radiometry (From Intro to Optics, Pedrotti -4) Radiometry is measurement of Emag radiation (light) Consider a small spherical source Total energy radiating from the body over some time is Q total Radiant
45 µm polystyrene bead embedded in scattering tissue phantom. (a,b) raw images under oblique
 raw images under oblique") Phase gradient microscopy in thick tissue with oblique back-illumination Tim N Ford, Kengyeh K Chu & Jerome Mertz Supplementary Figure 1: Comparison of added versus subtracted raw OBM images 45 µm polystyrene
Phase gradient microscopy in thick tissue with oblique back-illumination Tim N Ford, Kengyeh K Chu & Jerome Mertz Supplementary Figure 1: Comparison of added versus subtracted raw OBM images 45 µm polystyrene
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010
 An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
An Introduc+on to Mathema+cal Image Processing IAS, Park City Mathema2cs Ins2tute, Utah Undergraduate Summer School 2010 Luminita Vese Todd WiCman Department of Mathema2cs, UCLA lvese@math.ucla.edu wicman@math.ucla.edu
Deconvolution with curvelet-domain sparsity Vishal Kumar, EOS-UBC and Felix J. Herrmann, EOS-UBC
 Deconvolution with curvelet-domain sparsity Vishal Kumar, EOS-UBC and Felix J. Herrmann, EOS-UBC SUMMARY We use the recently introduced multiscale and multidirectional curvelet transform to exploit the
Deconvolution with curvelet-domain sparsity Vishal Kumar, EOS-UBC and Felix J. Herrmann, EOS-UBC SUMMARY We use the recently introduced multiscale and multidirectional curvelet transform to exploit the
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS.
 SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
SUPPLEMENTARY FILE S1: 3D AIRWAY TUBE RECONSTRUCTION AND CELL-BASED MECHANICAL MODEL. RELATED TO FIGURE 1, FIGURE 7, AND STAR METHODS. 1. 3D AIRWAY TUBE RECONSTRUCTION. RELATED TO FIGURE 1 AND STAR METHODS
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Experimental Optics. Michelson Interferometer. Contact. Last edition:
 Experimental Optics Contact Last edition: Michelson Interferometer 1 Background... 3... 4... 5... 13... 13 4.2... 14... 15... 15... 17... 19... 21... 21... 22... 22... 23... 24... 24... 25 2 1 Background
Experimental Optics Contact Last edition: Michelson Interferometer 1 Background... 3... 4... 5... 13... 13 4.2... 14... 15... 15... 17... 19... 21... 21... 22... 22... 23... 24... 24... 25 2 1 Background
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Single Photon Interference
 University of Rochester OPT253 Lab 2 Report Single Photon Interference Author: Nicholas Cothard Peter Heuer Professor: Dr. Svetlana Lukishova September 25th 2013 1 Abstract Wave-particle duality can be
University of Rochester OPT253 Lab 2 Report Single Photon Interference Author: Nicholas Cothard Peter Heuer Professor: Dr. Svetlana Lukishova September 25th 2013 1 Abstract Wave-particle duality can be
HOLOEYE Photonics. HOLOEYE Photonics AG. HOLOEYE Corporation
 HOLOEYE Photonics Products and services in the field of diffractive micro-optics Spatial Light Modulator (SLM) for the industrial research R&D in the field of diffractive optics Micro-display technologies
HOLOEYE Photonics Products and services in the field of diffractive micro-optics Spatial Light Modulator (SLM) for the industrial research R&D in the field of diffractive optics Micro-display technologies
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami
 Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Low-level Vision Processing Algorithms Speaker: Ito, Dang Supporter: Ishii, Toyama and Y. Murakami Adaptive Systems Lab The University of Aizu Overview Introduction What is Vision Processing? Basic Knowledge
Fast Object Classification in Single-pixel Imaging
 Fast Object Classification in Single-pixel Imaging Shuming Jiao Tsinghua Berkeley Shenzhen Institute (TBSI), Shenzhen, 518000, China albertjiaoee@126.com ABSTRACT In single-pixel imaging (SPI), the target
Fast Object Classification in Single-pixel Imaging Shuming Jiao Tsinghua Berkeley Shenzhen Institute (TBSI), Shenzhen, 518000, China albertjiaoee@126.com ABSTRACT In single-pixel imaging (SPI), the target
Applications of Piezo Actuators for Space Instrument Optical Alignment
 Year 4 University of Birmingham Presentation Applications of Piezo Actuators for Space Instrument Optical Alignment Michelle Louise Antonik 520689 Supervisor: Prof. B. Swinyard Outline of Presentation
Year 4 University of Birmingham Presentation Applications of Piezo Actuators for Space Instrument Optical Alignment Michelle Louise Antonik 520689 Supervisor: Prof. B. Swinyard Outline of Presentation
Advanced PIV algorithms Why and when advanced PIV algorithms?
 Advanced PIV algorithms Why and when advanced PIV algorithms? Speaker: Antonio Lecuona, Prof. Contributors: Dr. José I. Nogueira, Dr. Ángel Velázquez, A. Acosta, D. Santana, Prof. P. A. Rodríguez, Dr.
Advanced PIV algorithms Why and when advanced PIV algorithms? Speaker: Antonio Lecuona, Prof. Contributors: Dr. José I. Nogueira, Dr. Ángel Velázquez, A. Acosta, D. Santana, Prof. P. A. Rodríguez, Dr.
LED holographic imaging by spatial-domain diffraction computation of. textured models
 LED holographic imaging by spatial-domain diffraction computation of textured models Ding-Chen Chen, Xiao-Ning Pang, Yi-Cong Ding, Yi-Gui Chen, and Jian-Wen Dong* School of Physics and Engineering, and
LED holographic imaging by spatial-domain diffraction computation of textured models Ding-Chen Chen, Xiao-Ning Pang, Yi-Cong Ding, Yi-Gui Chen, and Jian-Wen Dong* School of Physics and Engineering, and
Reading. Shading. An abundance of photons. Introduction. Required: Angel , 6.5, Optional: Angel 6.4 OpenGL red book, chapter 5.
 Reading Required: Angel 6.1-6.3, 6.5, 6.7-6.8 Optional: Shading Angel 6.4 OpenGL red book, chapter 5. 1 2 Introduction An abundance of photons So far, we ve talked exclusively about geometry. Properly
Reading Required: Angel 6.1-6.3, 6.5, 6.7-6.8 Optional: Shading Angel 6.4 OpenGL red book, chapter 5. 1 2 Introduction An abundance of photons So far, we ve talked exclusively about geometry. Properly
What should I know about the 3D Restoration module? Improvision Technical Note No. 142 Last updated: 28 June, 2000
 What should I know about the 3D Restoration module? Improvision Technical Note No. 142 Last updated: 28 June, 2000 Topic This technical note discusses some aspects of iterative deconvolution and how to
What should I know about the 3D Restoration module? Improvision Technical Note No. 142 Last updated: 28 June, 2000 Topic This technical note discusses some aspects of iterative deconvolution and how to
ECS 175 COMPUTER GRAPHICS. Ken Joy.! Winter 2014
 ECS 175 COMPUTER GRAPHICS Ken Joy Winter 2014 Shading To be able to model shading, we simplify Uniform Media no scattering of light Opaque Objects No Interreflection Point Light Sources RGB Color (eliminating
ECS 175 COMPUTER GRAPHICS Ken Joy Winter 2014 Shading To be able to model shading, we simplify Uniform Media no scattering of light Opaque Objects No Interreflection Point Light Sources RGB Color (eliminating
Refractive Index Map Reconstruction in Optical Deflectometry Using Total-Variation Regularization
 Refractive Index Map Reconstruction in Optical Deflectometry Using Total-Variation Regularization L. Jacques 1, A. González 2, E. Foumouo 2 and P. Antoine 2 1 Institute of Information and Communication
Refractive Index Map Reconstruction in Optical Deflectometry Using Total-Variation Regularization L. Jacques 1, A. González 2, E. Foumouo 2 and P. Antoine 2 1 Institute of Information and Communication
Capturing, Modeling, Rendering 3D Structures
 Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
Computer Vision Approach Capturing, Modeling, Rendering 3D Structures Calculate pixel correspondences and extract geometry Not robust Difficult to acquire illumination effects, e.g. specular highlights
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Imaging and Deconvolution
 Imaging and Deconvolution Urvashi Rau National Radio Astronomy Observatory, Socorro, NM, USA The van-cittert Zernike theorem Ei E V ij u, v = I l, m e sky j 2 i ul vm dldm 2D Fourier transform : Image
Imaging and Deconvolution Urvashi Rau National Radio Astronomy Observatory, Socorro, NM, USA The van-cittert Zernike theorem Ei E V ij u, v = I l, m e sky j 2 i ul vm dldm 2D Fourier transform : Image
Module 7 VIDEO CODING AND MOTION ESTIMATION
 Module 7 VIDEO CODING AND MOTION ESTIMATION Lesson 20 Basic Building Blocks & Temporal Redundancy Instructional Objectives At the end of this lesson, the students should be able to: 1. Name at least five
Module 7 VIDEO CODING AND MOTION ESTIMATION Lesson 20 Basic Building Blocks & Temporal Redundancy Instructional Objectives At the end of this lesson, the students should be able to: 1. Name at least five
Motion and Tracking. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Motion and Tracking Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Motion Segmentation Segment the video into multiple coherently moving objects Motion and Perceptual Organization
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Super-resolution on Text Image Sequences
 November 4, 2004 Outline Outline Geometric Distortion Optical/Motion Blurring Down-Sampling Total Variation Basic Idea Outline Geometric Distortion Optical/Motion Blurring Down-Sampling No optical/image
November 4, 2004 Outline Outline Geometric Distortion Optical/Motion Blurring Down-Sampling Total Variation Basic Idea Outline Geometric Distortion Optical/Motion Blurring Down-Sampling No optical/image
Optical Flow-Based Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object